Hierarchical Distributed Motion Control for Multiple Linear Switched Reluctance Machines



Abstract
:1. Introduction
2. Theoretical Background
2.1. LSRM Modeling
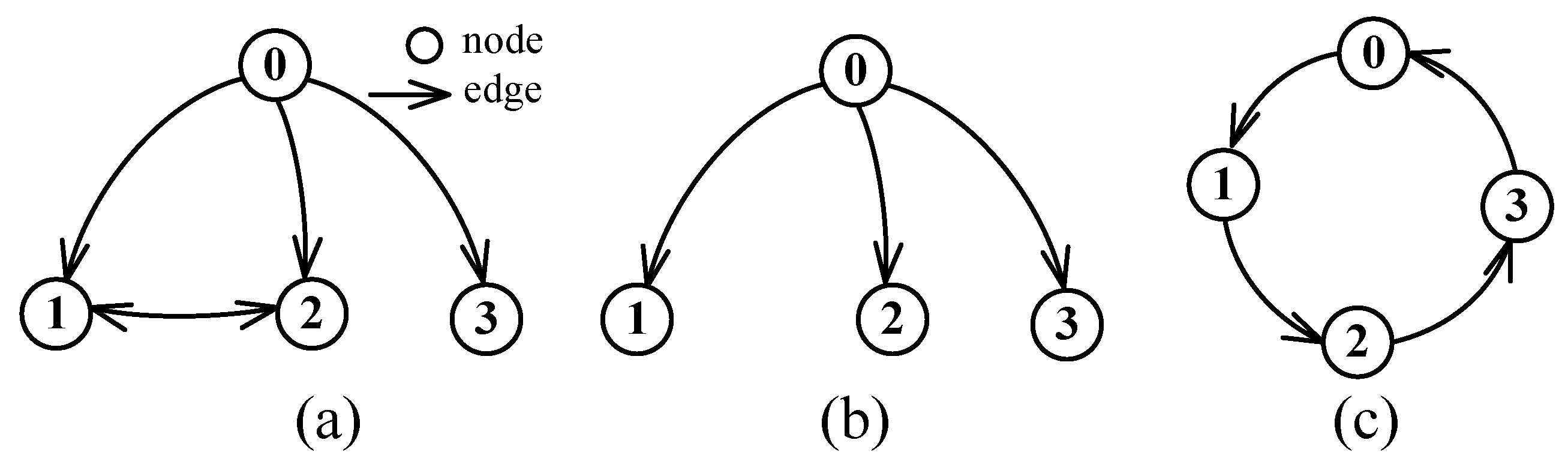
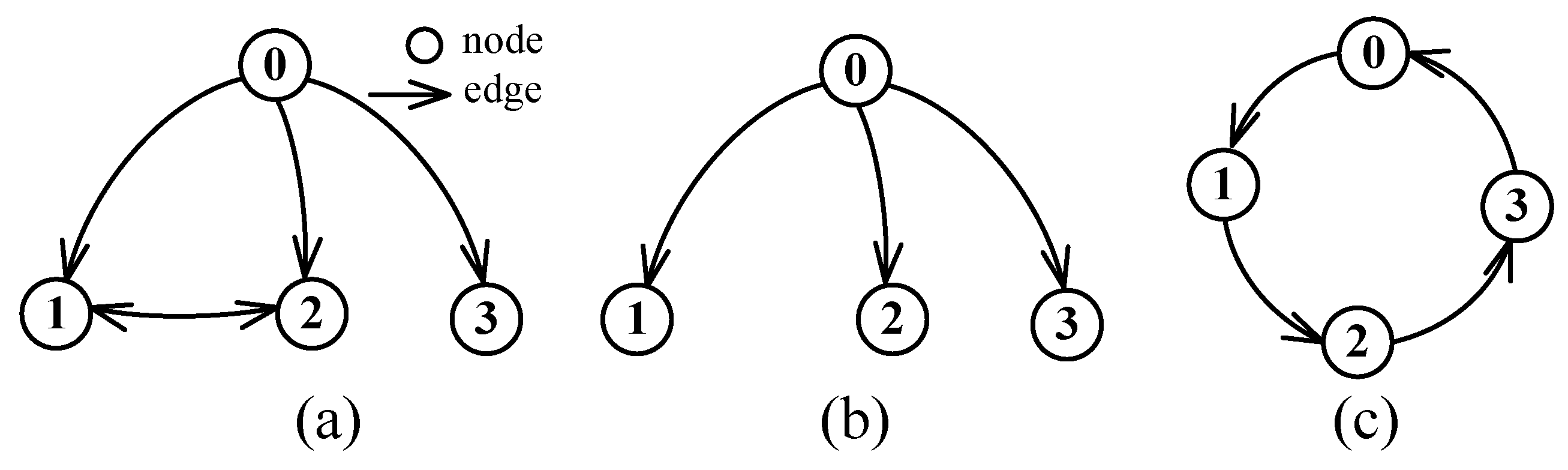
2.2. Network Topology and Graph Theory
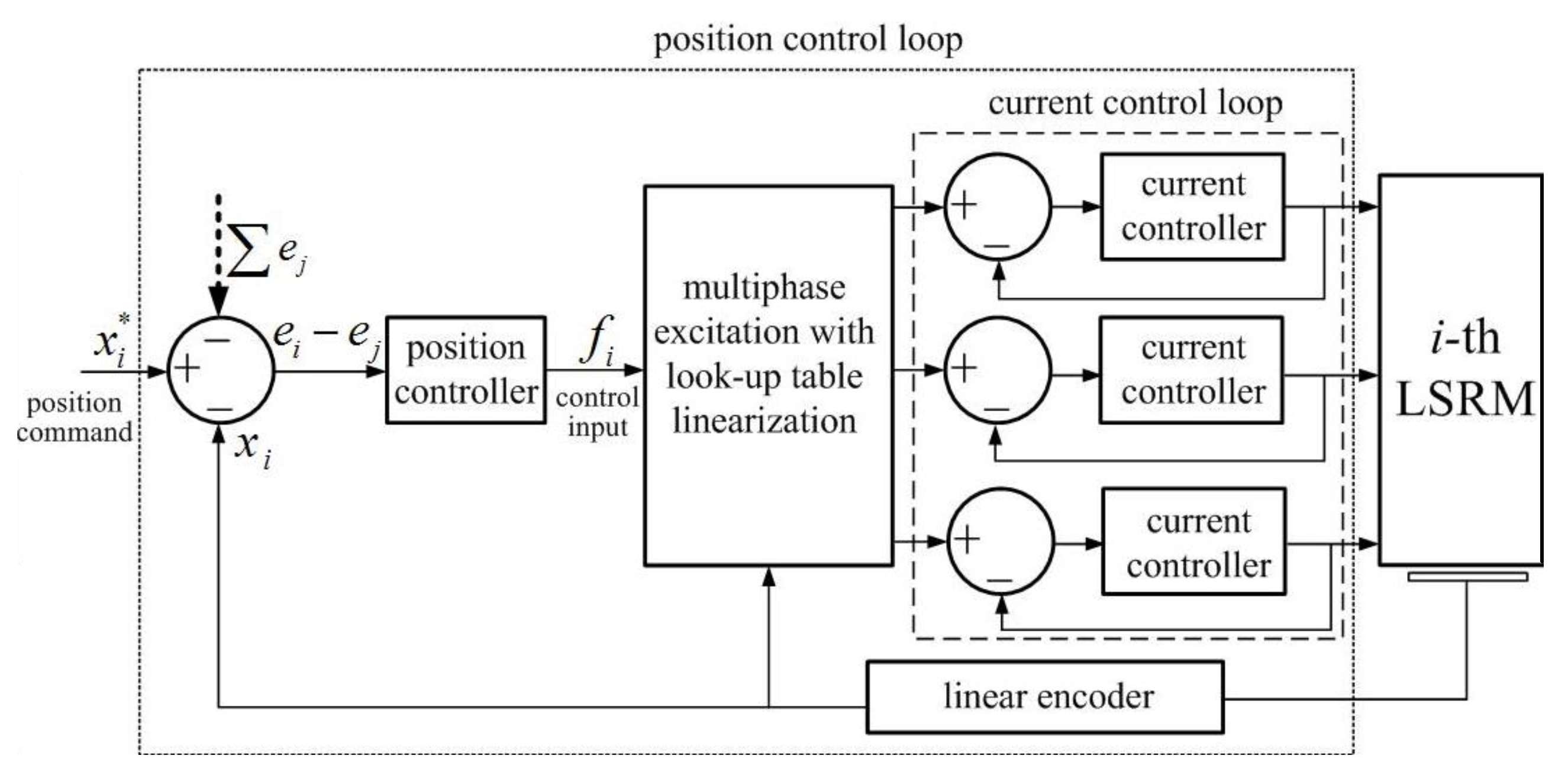
3. Control Strategy
3.1. Reference Signal Consensus Module
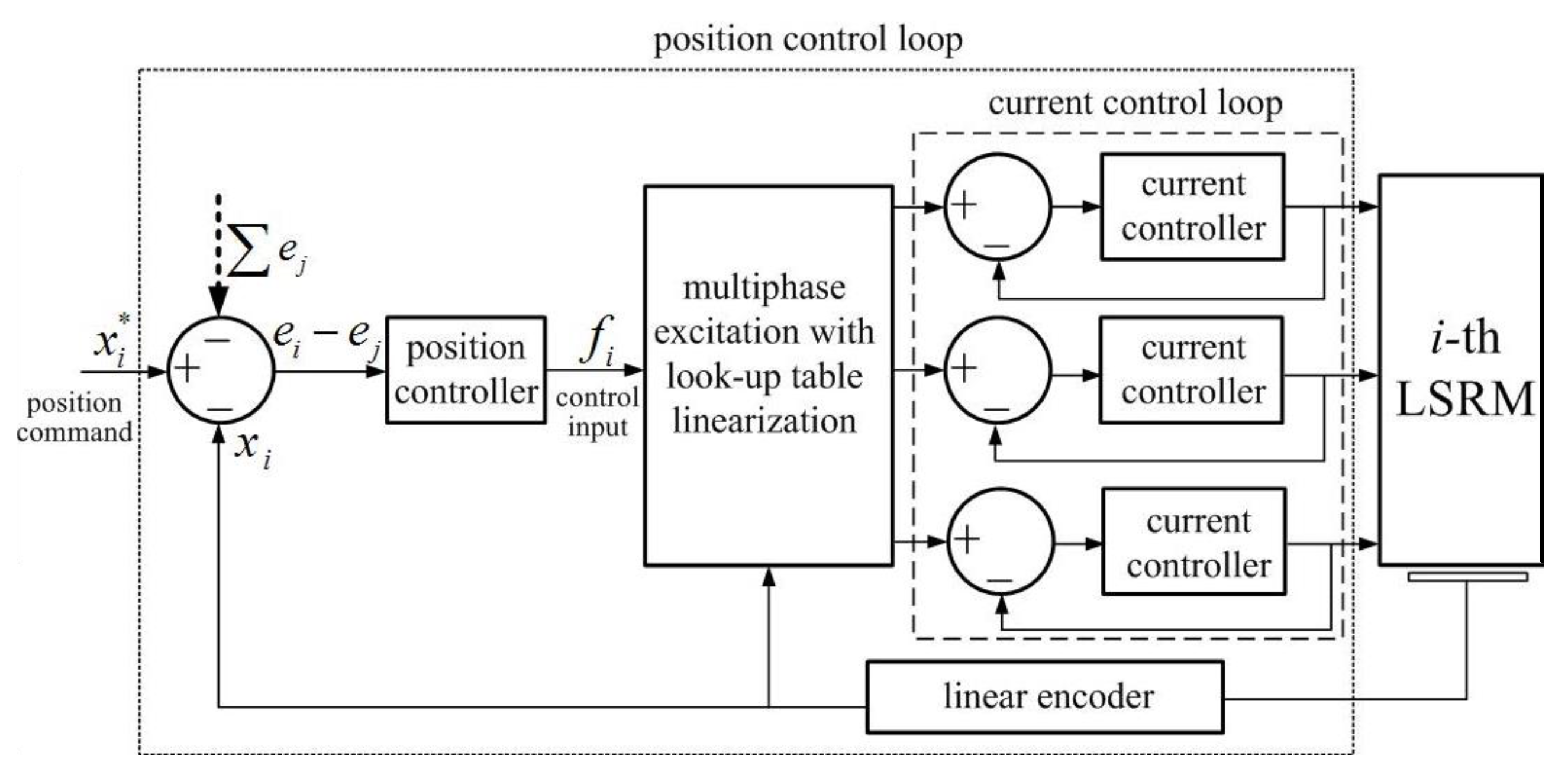
3.2. Unit System Control
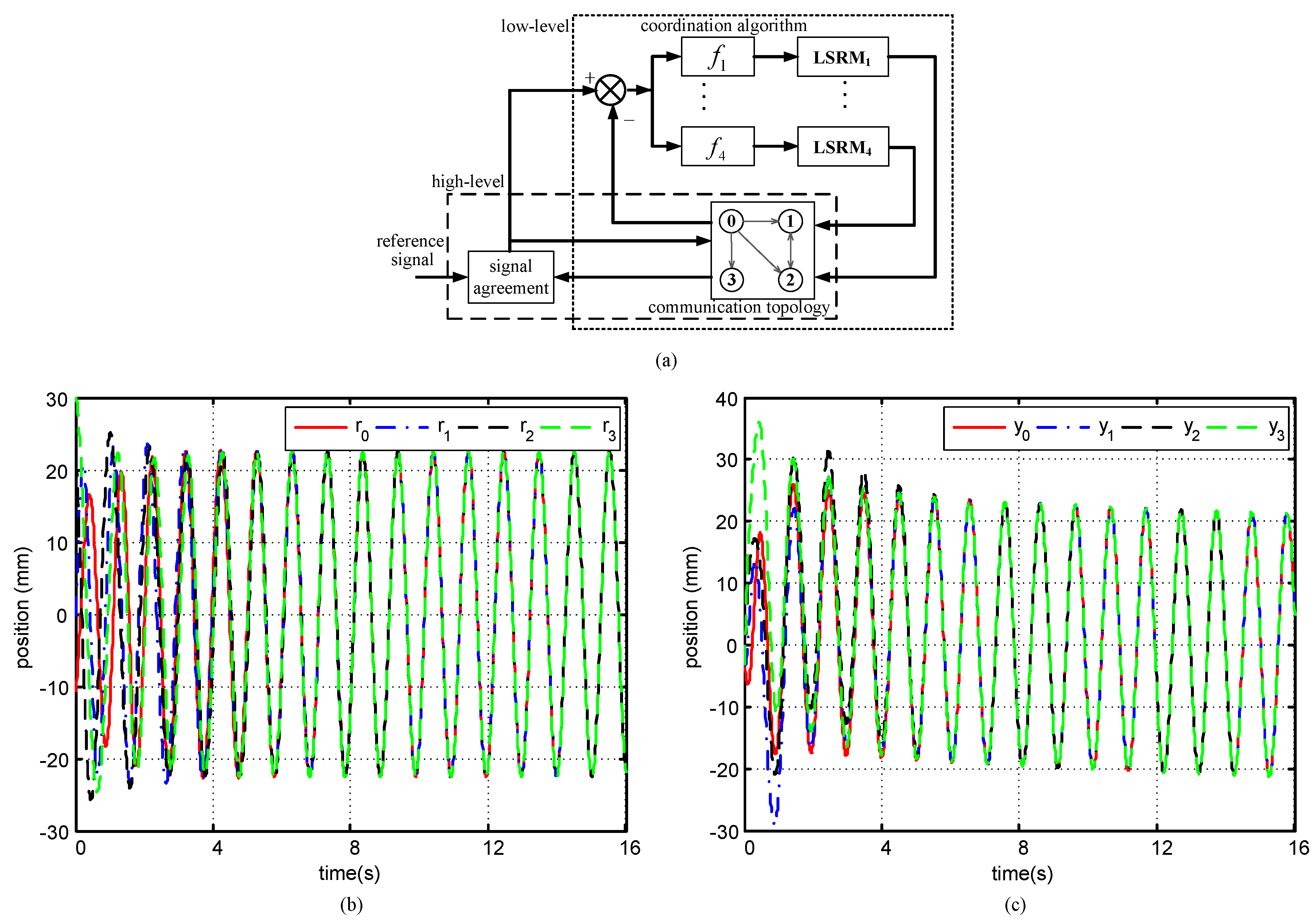
3.3. Coordinated Tracking Control Module
3.4. Stability Analysis
4. Network Construction
4.1. Simulation Analysis
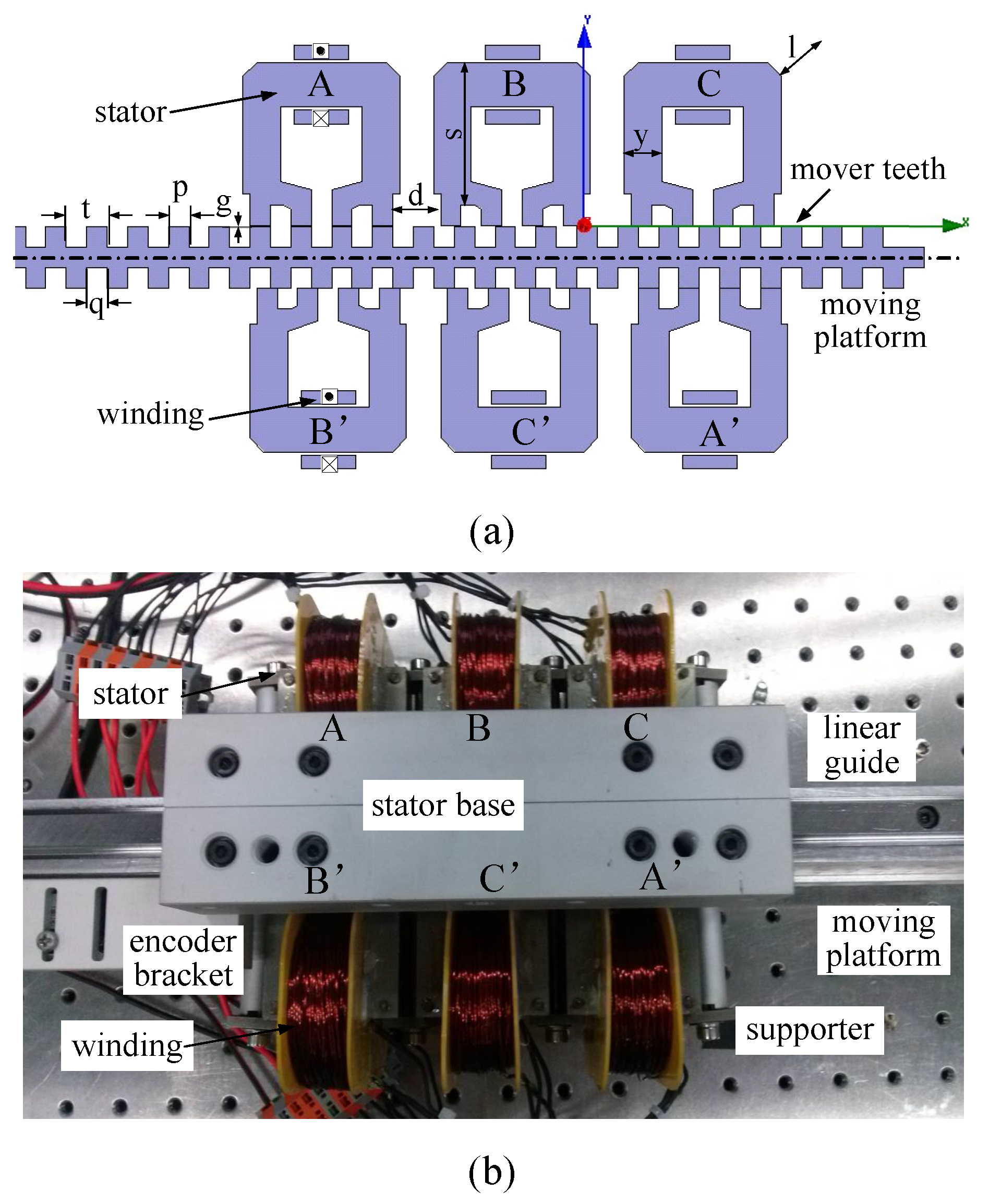
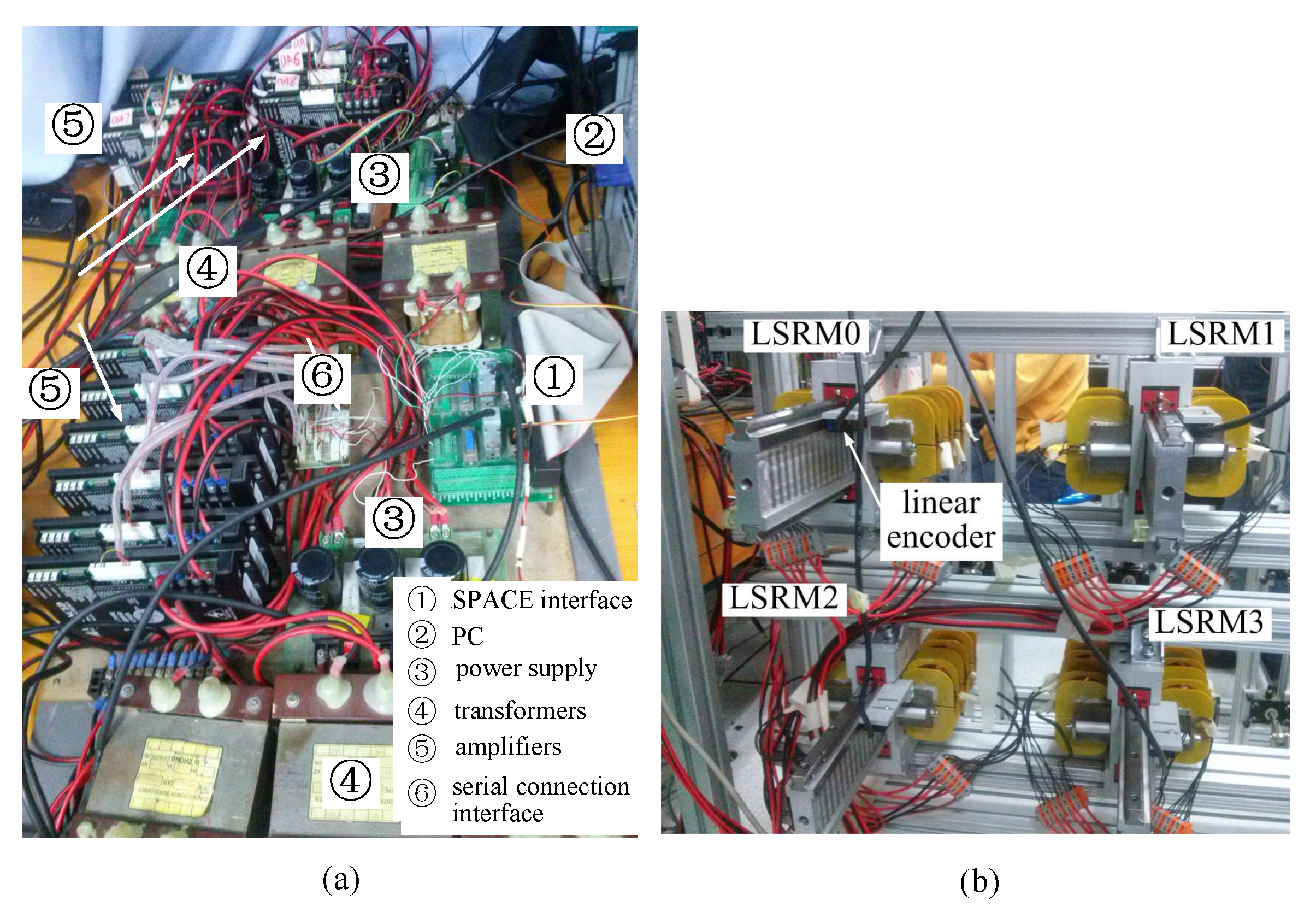
4.2. Experimental Setup
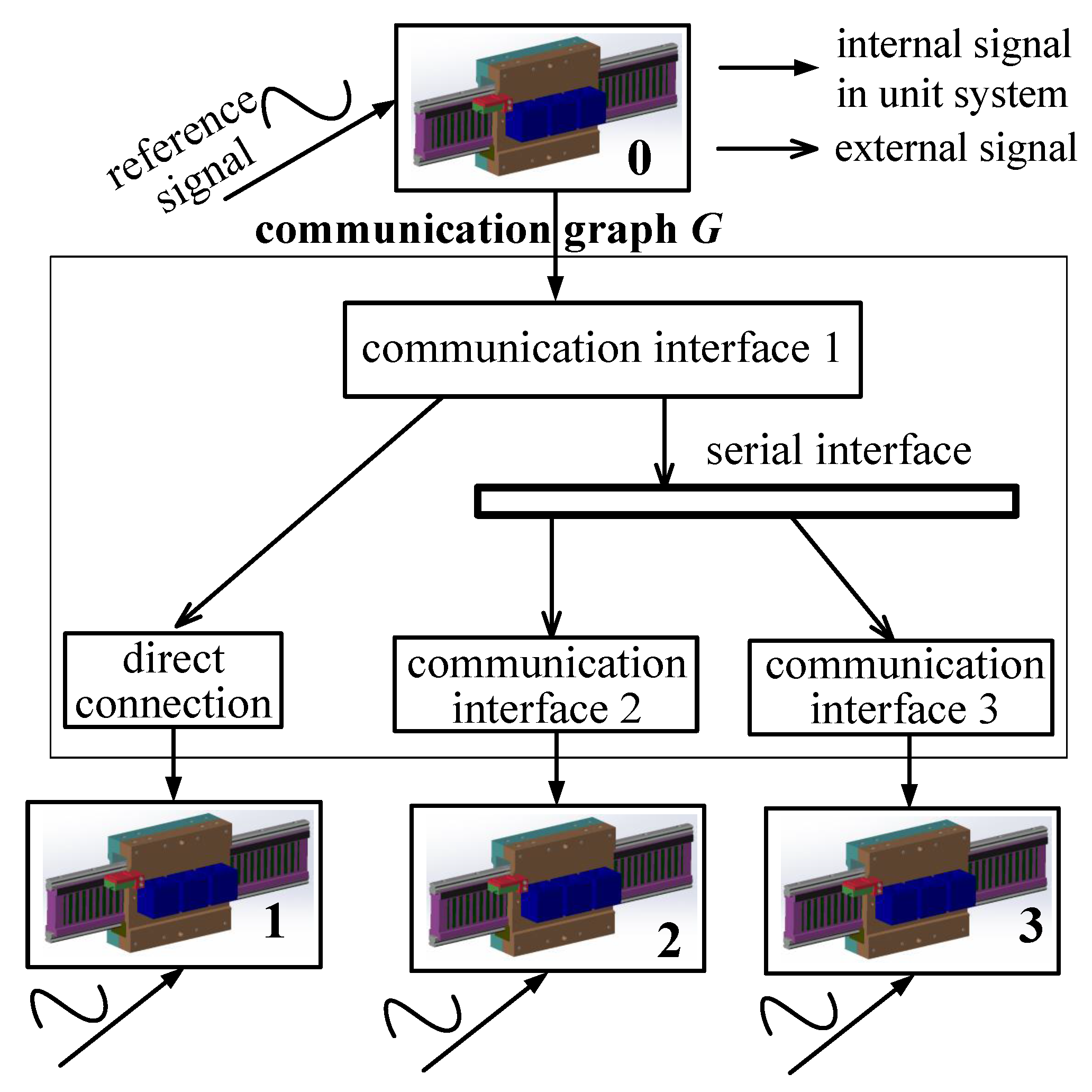
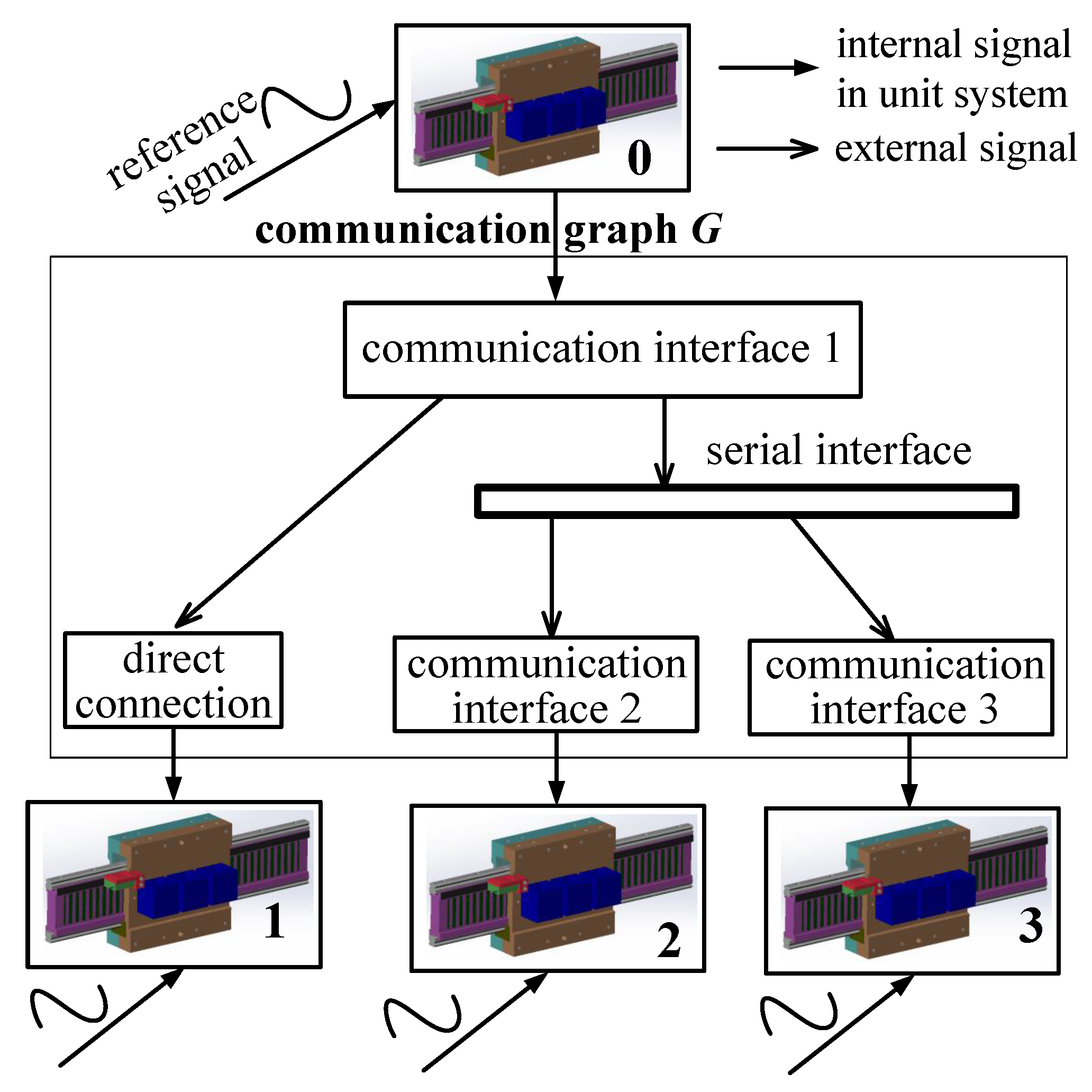
4.3. Network Configuration
5. Experimental Results
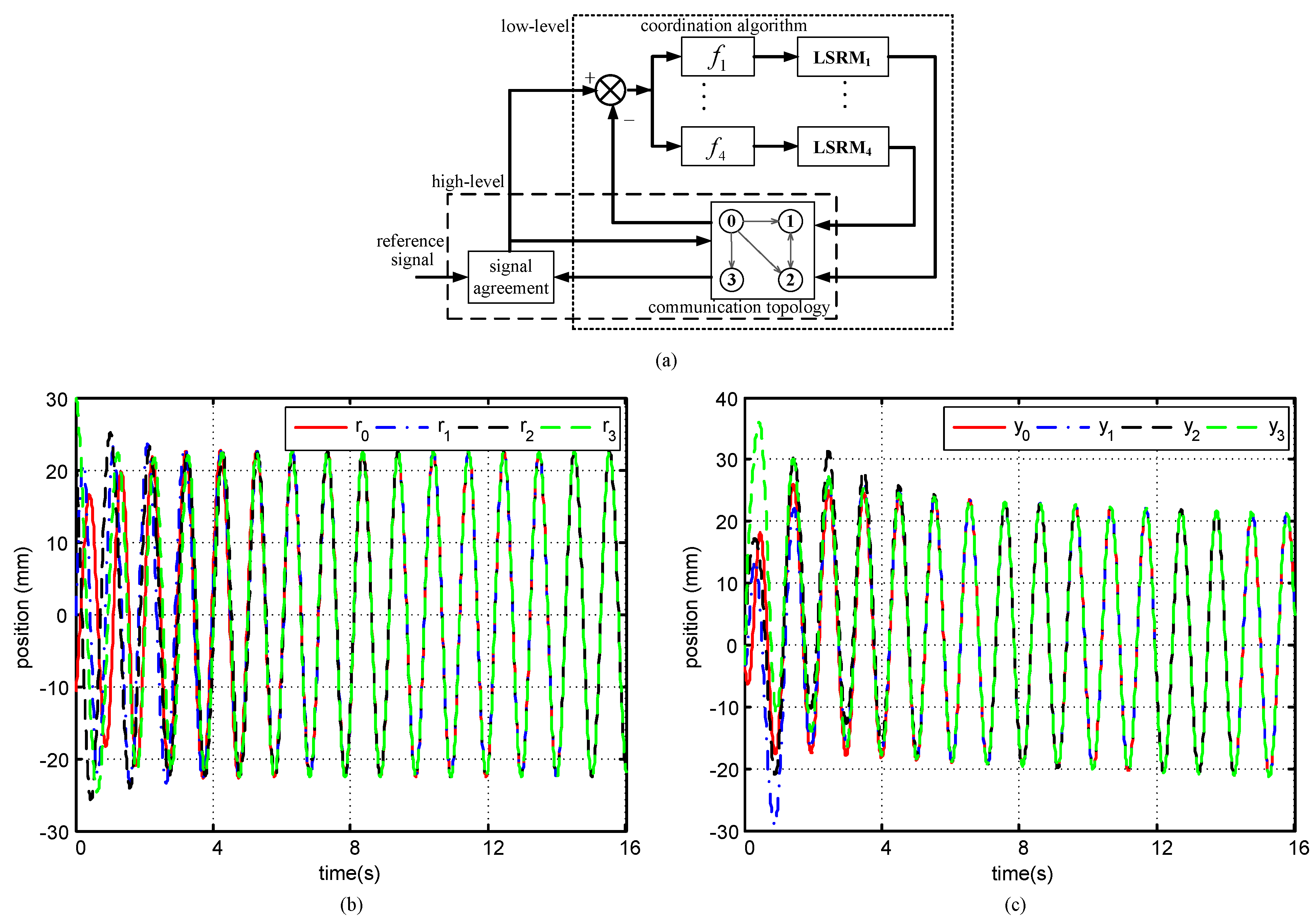
5.1. Control Performance under Two-level Tracking Control
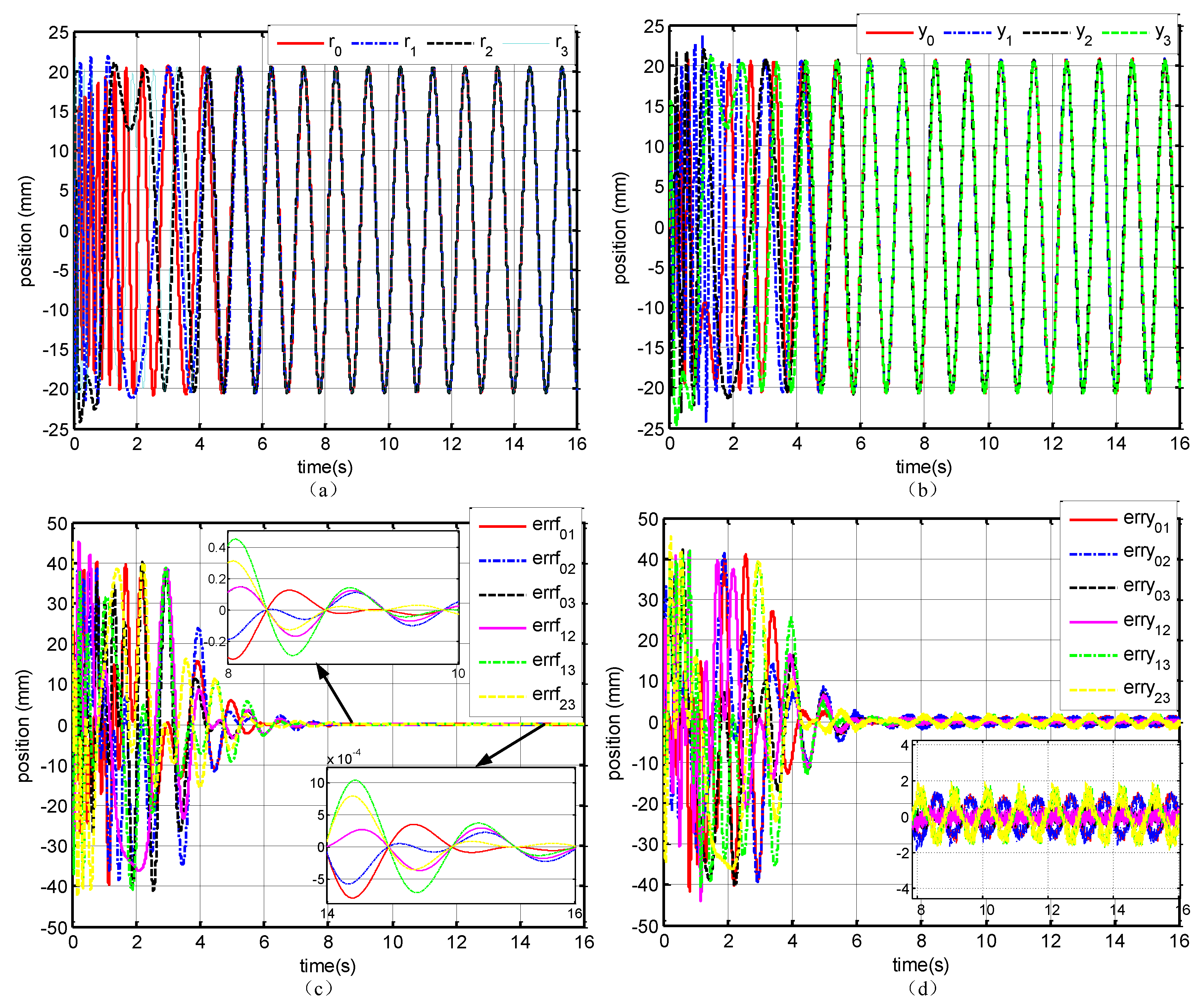
5.2. Performance under Lower-Level Tracking
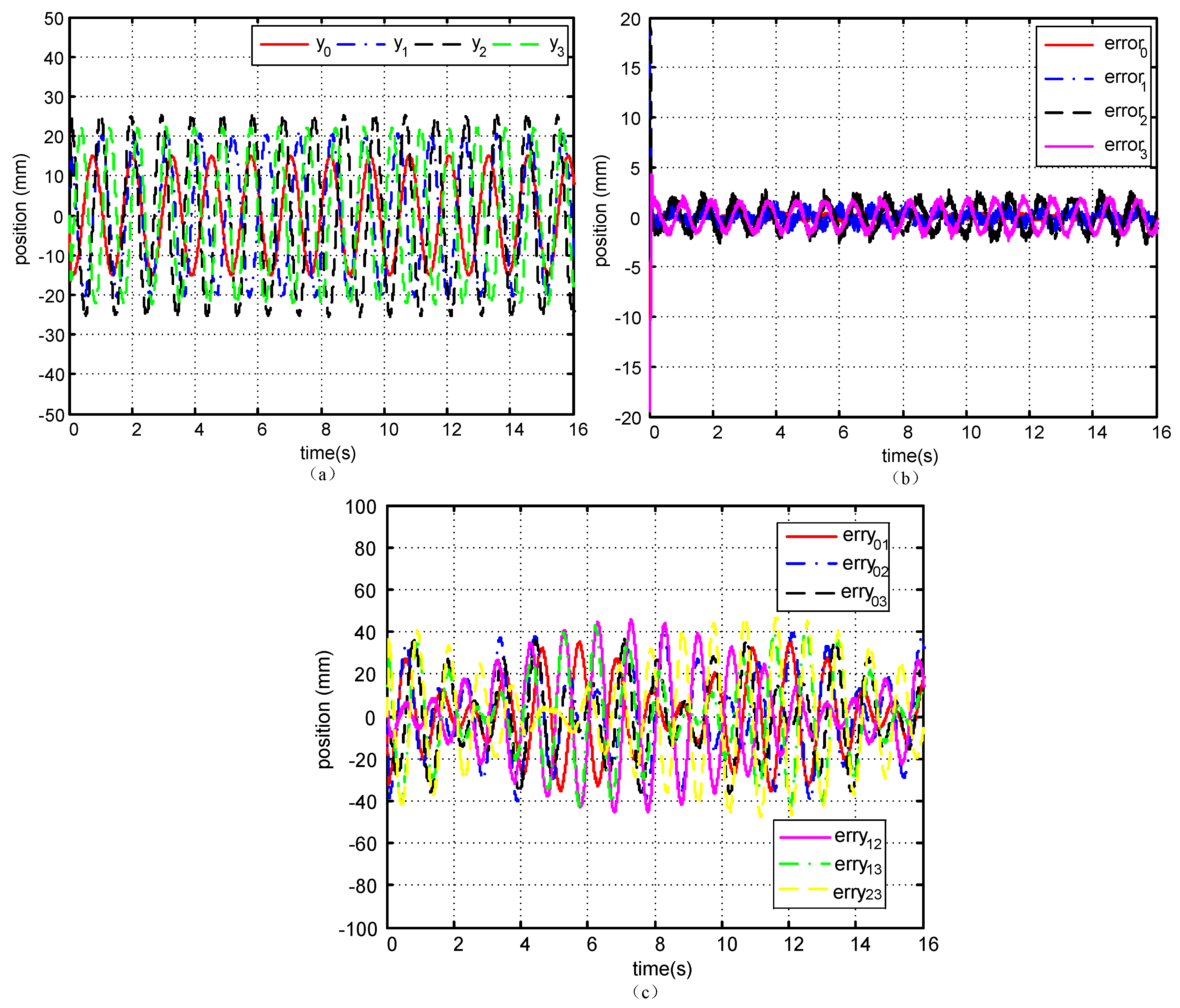
5.3. Performance under Independent Tracking
6. Conclusions and Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Zhang, H.; Lewis, F.L.; Qu, Z. Lyapunov, adaptive, and optimal design techniques for cooperative systems on directed communication graphs. IEEE Trans. Ind. Electron. 2012, 59, 3026–3041. [Google Scholar] [CrossRef]
- Movric, K.H.; Lewis, F.L. Cooperative optimal control for multi-agent systems on directed graph topologies. IEEE Trans. Autom. Control 2014, 59, 769–774. [Google Scholar] [CrossRef]
- Cao, Y.; Ren, W. Multi-vehicle coordination for double-integrator dynamics under fixed undirected/directed interaction in a sampled-data setting. Int. J. Robust Nonlinear Control 2010, 20, 981–1000. [Google Scholar] [CrossRef]
- Ren, W. On consensus algorithms for double-integrator dynamics. IEEE Trans. Autom. Control 2008, 58, 1503–1509. [Google Scholar] [CrossRef]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans. Ind. Inform. 2013, 9, 427–438. [Google Scholar] [CrossRef]
- Egerstedt, M.; Martini, S.; Cao, M.; Camlibel, K.; Bicchi, A. Interacting with networks: how does structure relate to controllability in single-leader consensus networks? Control Syst. Mag. 2012, 32, 2137–2146. [Google Scholar] [CrossRef]
- Yu, W.; Zhou, L.; Yu, X.; Lu, J.; Lu, R. Consensus in multi-agent systems with second-order dynamics and sampled data. IEEE Trans. Ind. Inform. 2013, 9, 66–73. [Google Scholar] [CrossRef]
- Li, Z.; Wen, G.; Duan, Z.; Ren, W. Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs. IEEE Trans. Autom. Control 2015, 60, 1152–1157. [Google Scholar] [CrossRef]
- Qu, Z.; Wang, J.; Hull, R.A. Cooperative control of dynamical systems with application to autonomous vehicles. IEEE Trans. Autom. Control 2008, 53, 894–911. [Google Scholar] [CrossRef]
- Li, Z.; Liu, H.; Zhu, B.; Gao, H. Robust second-order consensus tracking of multiple 3-DOF laboratory helicopters via output feedback. IEEE/ASME Trans. Mechatron. 2015, 20, 2538–2549. [Google Scholar] [CrossRef]
- Szabo, L.; Viorel, I.A.; Chisu, I.; Kovacs, Z. A novel double salient permanent magnet linear motor. In Proceedings of the International Conference on Power Electronics, Drives and Motion (PCIM), Nürnberg, Germany, 1999. [Google Scholar]
- Zhang, B.; Yuan, J.; Qiu, L.; Cheung, N.; Pan, J.F. Distributed coordinated motion tracking of the linear switched reluctance machines based group control system. IEEE Trans. Ind. Electron. 2016, 63, 1480–1489. [Google Scholar] [CrossRef]
- Pan, J.F.; Zou, Y.; Cao, G. An asymmetric linear switched reluctance motor. IEEE Trans. Energy Convers. 2013, 28, 444–451. [Google Scholar] [CrossRef]
- Park, J.; Jang, S.; Choi, J.; Sung, S.; Kim, I. Dynamic and experimental performance of linear-switched reluctance machine with inductance variation according to airgap length. IEEE Trans. Mag. 2010, 46, 2334–2337. [Google Scholar] [CrossRef]
- Amoros, J.G.; Andrada, P. Sensitivity analysis of geometrical parameters on a double-sided linear switched reluctance motor. IEEE Trans. Ind. Electron. 2010, 57, 311–319. [Google Scholar]
- Lin, J.; Cheng, K.W.E.; Zhang, Z.; Cheung, N.C.; Xue, X.; Ng, T. Active suspension system based on linear switched reluctance actuator and control schemes. IEEE Trans. Veh. Technol. 2013, 62, 562–572. [Google Scholar] [CrossRef]
- Pan, J.F.; Zou, Y.; Cao, G. Adaptive controller for the double-sided linear switched reluctance motor based on the nonlinear inductance modelling. IET Electr. Power Appl. 2013, 7, 1–15. [Google Scholar] [CrossRef]
- Mesbahi, M.; Egerstedt, M. Graph Theoretic Methods for Multiagent Networks; Princeton University Press: Princeton, NJ, USA, 2010; Chapter 6. [Google Scholar]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperative Control; Springer: London, UK, 2008; Chapters 3–4. [Google Scholar]
- Ren, W.; Atkins, E. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control 2007, 17, 1002–1033. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Value |
|---|---|
| Mass of moving platform | 3.8 kg |
| Mass of stator | 5.0 kg |
| Pole pitch | 12 mm |
| Pole width | 6 mm |
| Air gap length | 0.3 mm |
| Phase resistance | 2 Ohm |
| Number of turns | 200 |
| Stack length | 50 mm |
| Rated power | 250 W |
| Voltage | 50 Volt |
| Encoder resolution | 1 m |
| Symbol | Value |
|---|---|
| 1 | |
| 1 | |
| LSRM | Reference Signal | Actual Signal | Error | Relative Reference | Relative Position |
|---|---|---|---|---|---|
| 0 | |||||
| 1 | |||||
| 2 | |||||
| 3 | |||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Yuan, J.; Luo, J.; Wu, X.; Qiu, L.; Pan, J.F. Hierarchical Distributed Motion Control for Multiple Linear Switched Reluctance Machines. Energies 2017, 10, 1426. https://doi.org/10.3390/en10091426
Zhang B, Yuan J, Luo J, Wu X, Qiu L, Pan JF. Hierarchical Distributed Motion Control for Multiple Linear Switched Reluctance Machines. Energies. 2017; 10(9):1426. https://doi.org/10.3390/en10091426
Chicago/Turabian StyleZhang, Bo, Jianping Yuan, Jianjun Luo, Xiaoyu Wu, Li Qiu, and J.F. Pan. 2017. "Hierarchical Distributed Motion Control for Multiple Linear Switched Reluctance Machines" Energies 10, no. 9: 1426. https://doi.org/10.3390/en10091426
APA StyleZhang, B., Yuan, J., Luo, J., Wu, X., Qiu, L., & Pan, J. F. (2017). Hierarchical Distributed Motion Control for Multiple Linear Switched Reluctance Machines. Energies, 10(9), 1426. https://doi.org/10.3390/en10091426