1. Introduction
Wave energy, one of the four main sources of ocean renewable energy (wave energy, tidal energy, ocean thermal energy and offshore wind energy), is extremely abundant since it is estimated at around 2 TW worldwide [
1]. Utilization of wave energy has various significant advantages, such as a low level of negative environmental impact [
2,
3], high energy density [
4] and continuous power supply during the whole day [
5], in comparison with other forms of renewable energy. According to the present situation, however, the cost of utilization of wave energy is much higher than that of large-scale traditional power generation stations [
6] due to their low efficiency. Multifunctional structures embedded with wave energy converters (WECs) may be a promising alternative to make WECs more competitive [
7].
There are a few novel concepts for multipurpose compounded structures for wave energy harvesting which are not limited to those listed below. In order to integrate wave energy converters with shore-protection structures, a flexible floating breakwater consisting of multiple WEC modules installed between adjacent modules are proposed by Michailides and Angelides [
8]. Their results showed that a desired level of protection by the flexible floating breakwater could be achieved by the integrated effect of WECs. A similar structure which integrates oscillating-water-column (OWC) converters with floating breakwaters was proposed by He et al. [
6]. Asymmetric pneumatic chambers attached to a floating breakwater were designed to improve the performance in wave energy extraction via enhancing the resonance of the oscillating water column inside the chambers over a wide range of wave frequencies. The corresponding experimental study was carried out to verify the theoretical analysis under regular wave conditions. Apart from the literatures listed above, there are a lot of studies about compounded breakwater system integrated with wave energy converters, such as floating breakwaters attached with a pile-supported OWC structure [
9], rubble mound breakwaters with embedded collecting wave reservoir type or Savonius rotor type WECs [
10,
11], etc. On the other hand, most remote ocean areas like islands are far from the power grid, so providing electricity from a land power grid to these areas is often costly and non-environmentally friendly [
12]. In such cases, applying a renewable energy system in remote places has been the best choice [
13,
14]. In certain islands, the near-shore wave energy is shown to be a proper renewable energy source for power supply [
15]. In addition, ocean space resources, energy resources, chemical resources, etc., for remote locations are more and more important due to the heavily-used land space and energy shortage. A multifunctional floating system for powering harbors, tourist resorts or manufacturing bases embedded with wave energy harvesting and storage is economically preferable. Fiaschi et al. proposed a novel offshore platform used as a compressed air energy storage (CAES) system integrated with three energy storage systems [
16]. They conceived that this removable multipurpose offshore power platform can be used for special users such as tourist resorts or villages in small or medium islands. Zinni patented a ‘Modular Floating Pier and Integrated Multipurpose Generator of Energy from Renewable Sources’ to be used as an infrastructure aimed at the generation of electricity, thermal energy and CAES from renewable sources in addition to fulfilling the normal functions of a floating pier or platform at the service of boating, beach resorts and maritime activities in general [
17]. Hartono proposed a novel floating housing for equipment coupled with a wave energy generation system [
18]. The same author also proposed very large floating structures (VLFS) used as floating offshore airports [
19]. Different from the pontoon-type VLFS proposed above, a semi-submerged VLFS consisting of a thin upper hull and a great number of buoy columns has also widely been studied in order to reduce hydrodynamic interactions [
20,
21]. With this motivation, a multi-usage platform supported by an array of floating buoys can form a multi-purpose wave farm where PTOs embedded between the columns and the upper platform act as devices for energy extraction. In addition, the large floating platform can be utilized in various fields such as offshore airports [
22], marine cities, energy farms [
23], fuel storage facilities [
24], etc. to better utilize the ocean space and resources [
25].
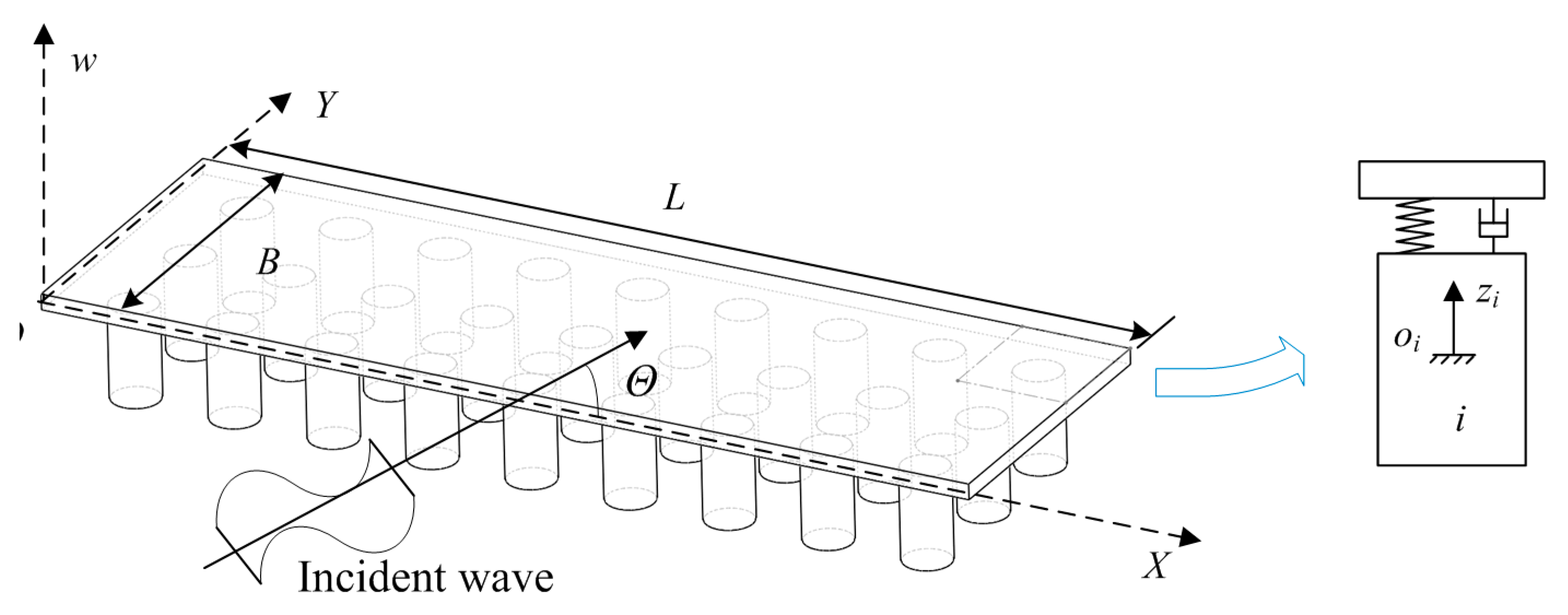
In this paper, a novel integrated wave energy farm model is proposed and its dynamic characteristics are examined. The wave energy harvesting system consists of an array of buoyance columns connected with a flexible platform which is not only a wave energy harvesting system, but also a vast floating platform for various purpose services. The platform, modeled as a classical plate, is coupled with multiple buoyance columns through linear connectors. A linear hydraulic PTO mechanism with linear damping coefficient is installed between each column and the platform to extract wave energy. The hydrodynamic interactions among the multiple buoyance columns are analyzed using an exact algebraic method in the frequency domain. A parametric dynamic model is formulated by using Hamilton’s principle which can be discretized using the Galerkin method. The effect of the parameters for the PTO and the connector on displacement of the platform and the wave energy absorption are analyzed for regular and irregular waves. This study provides a new insight and theoretical guidelines for the design of wave energy farms.
3. Numerical Results and Discussion
The pertinent information of the compounded wave energy farm is given in
Table 1 partially referenced in [
20]. For the wave parameters, the wave period is spanned in the interval of
for regular waves.
For the convenience of analysis, we choose
as the characteristic variables to nondimensionalize the floating system parameters. The non-dimensional parameters for the model are defined as [
23]:
The non-dimensional capture width which performs the efficiency of the energy harvesting system is defined as . The non-dimensional wave number which denotes the relationship between the wave length and structure size defined as . As commonly adopted, the displacements of the platform and the buoyance columns are nondimensionalized by using the wave amplitude which is also named as the response amplitude operator (RAO).
In the following, we firstly study the effect of system parameters, the coefficients of connector stiffness and PTO’s damping, on the energy absorption characteristics, and then, the effect of wave parameters on energy absorption and dynamic characteristics of the floating system is analyzed in regular seas. This aims to gain a better understanding of the performance of the wave energy harvesting system. Finally, the wave energy absorption characteristics in various wave conditions are studied in irregular seas.
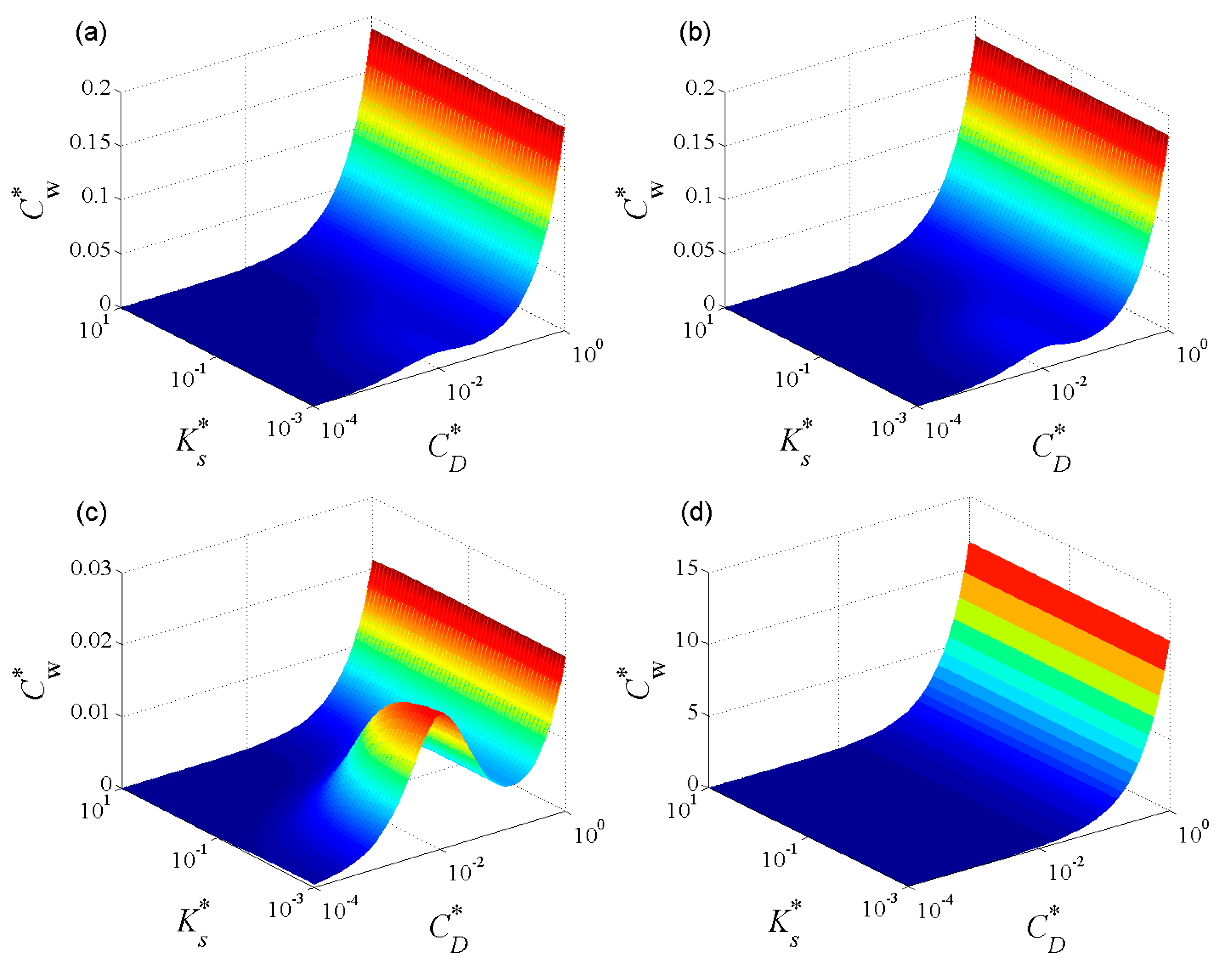
Figure 3 shows the 3D diagram of the capture width of the wave energy harvesting system in parameter space
for four different wave angles
with wave number
(corresponding to wave period
). From
Figure 3 we can see that the capture width almost stays at a relative small value while there are small resonance peaks like hills for some certain wave angles in the relative small damping region. With the increase of damping coefficient, the capture width increases exponentially. Different from the damping coefficient, the effect of stiffness coefficient on capture width is less sensitive.
Comparing the four cases of different wave angles, the trends for different wave angles are always similar, while the capture width for wave angle is much larger compared with that of any other three wave angles. In order to clearly reveal the effect of wave conditions on energy absorption, we take the certain stiffness and damping coefficient picked at and to illustrate the following results.
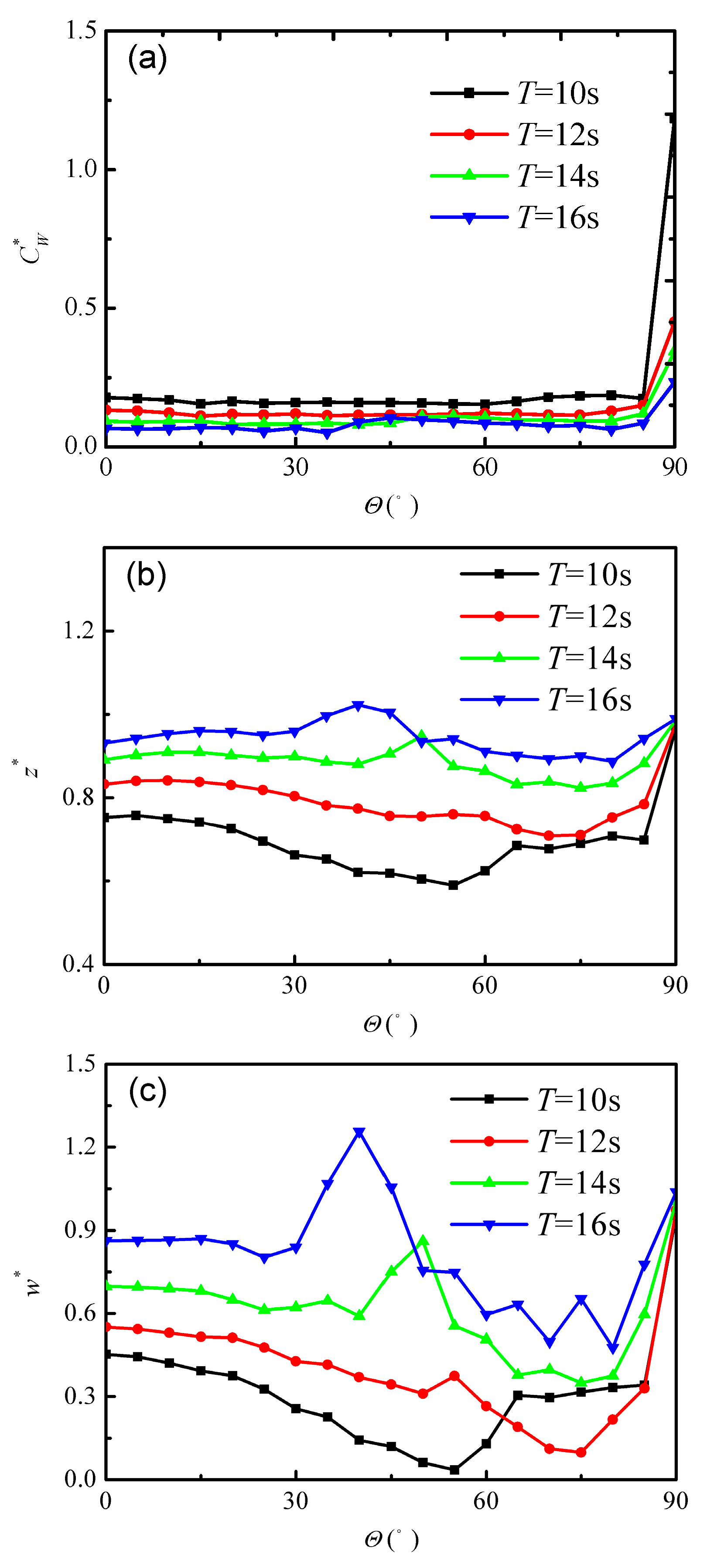
Figure 4 illustrates the wave energy capture width and the maximum response amplitudes of the energy harvesting system under the change of incident wave angle. From
Figure 4a, we can see that the capture width appears weak fluctuation in the range of
and rises sharply at incident wave angle
regardless of what wave period is considered.
Further referring to the response magnitudes in
Figure 4b,c, we can see that the response amplitudes of the wave energy harvesting system under the change of incident wave angle have the same trend whereby that they first decrease and then increase with the increase of wave angle. There is a response peak in the middle wave angle range for different wave periods. Different from the capture width, the response amplitudes of the wave energy harvesting system change in the same order along the whole range of wave angle. In order to reveal the reason for the different trends between the capture width and response amplitudes under the change of wave angle, we plot the distribution of wave power extraction from each PTO and the platform deformation shape for two typical wave angle picked at
with wave number
, shown in
Figure 5 and
Figure 6.
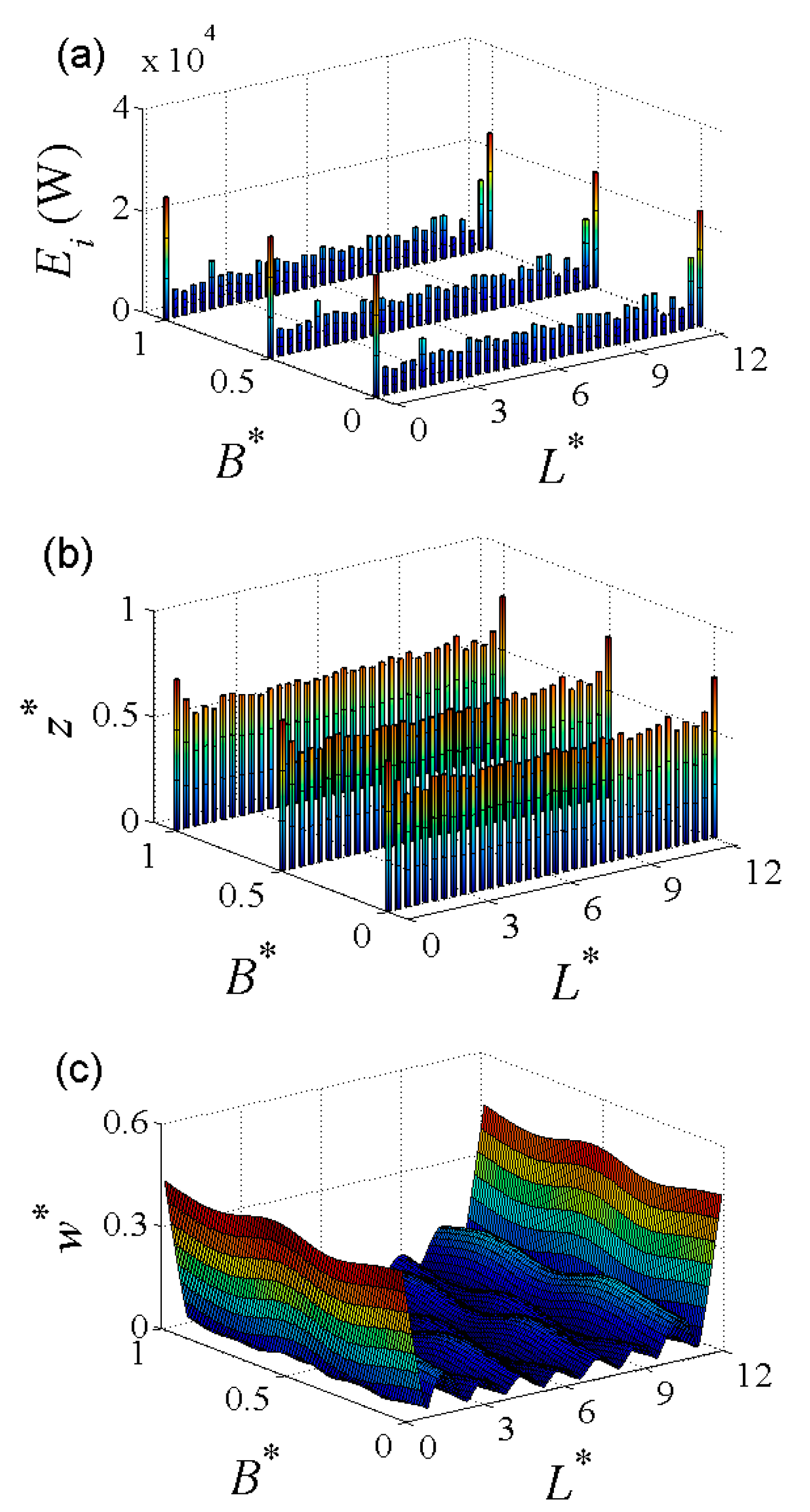
Figure 5a indicates the wave power extracted from each PTO located at different positions. The columns in
Figure 5b illustrate the response amplitudes of the buoyance columns located at corresponding positions and
Figure 5c indicates the deformation shape of the platform. From
Figure 5a, we can see that the wave power extracted from the three rows PTOs has an identical distribution along the longitudinal direction while the PTOs located at the two ends capture almost four times wave power than that of others located in the middle region. The response amplitudes of buoyance columns, shown in
Figure 5b, also have a similar trend as the capture width in that the two ends buoyance columns have larger motions. Considering the compounded system integration with wave energy capture with ocean space utilization, the stationarity for the upper platform is also important. The deformation shape of the platform, shown in
Figure 5c, is corrugated, where the motions in the middle region are relatively weak while motions at the two ends of the upstream and downstream are relatively large, which coincides with the results for the traditional VLFS [
20]. Due to the large scale of the platform, the gradient induced by the motions is still very small, so the platform can satisfy its functional requirement.
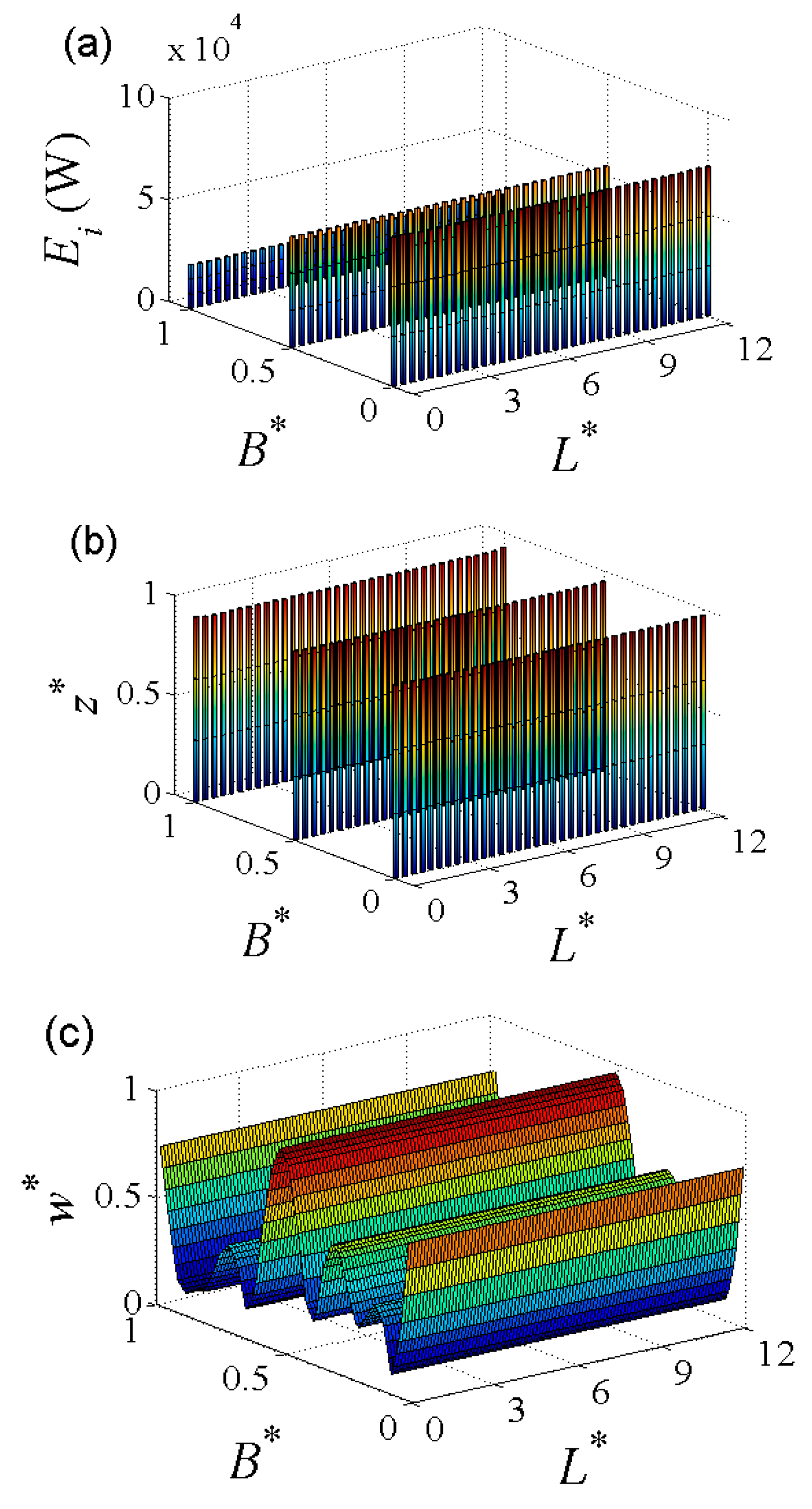
Figure 6 illustrates the wave power extraction and response amplitudes of the energy harvesting system in beam seas. From
Figure 6b, the response amplitudes for the whole buoyance columns are almost the same while they are larger than the amplitude shown in
Figure 5b. Due to the reason of beam seas, the deformation shape for the platform only fluctuates along the transverse direction. From
Figure 6c, we can see that the wave number of fluctuation for the platform deformation in beam sea conditions is less than the wave number along the longitudinal direction shown in
Figure 5c, which indicates that the low order eigenfunctions play a predominant role in beam seas. In fact, the reason for this is that the longitudinal stiffness is less than the transverse stiffness for the isotropic plate due to the large length in comparison with its width. From
Figure 6a, we can see that the wave power extraction is also invariable along the longitudinal direction like the amplitudes shown in
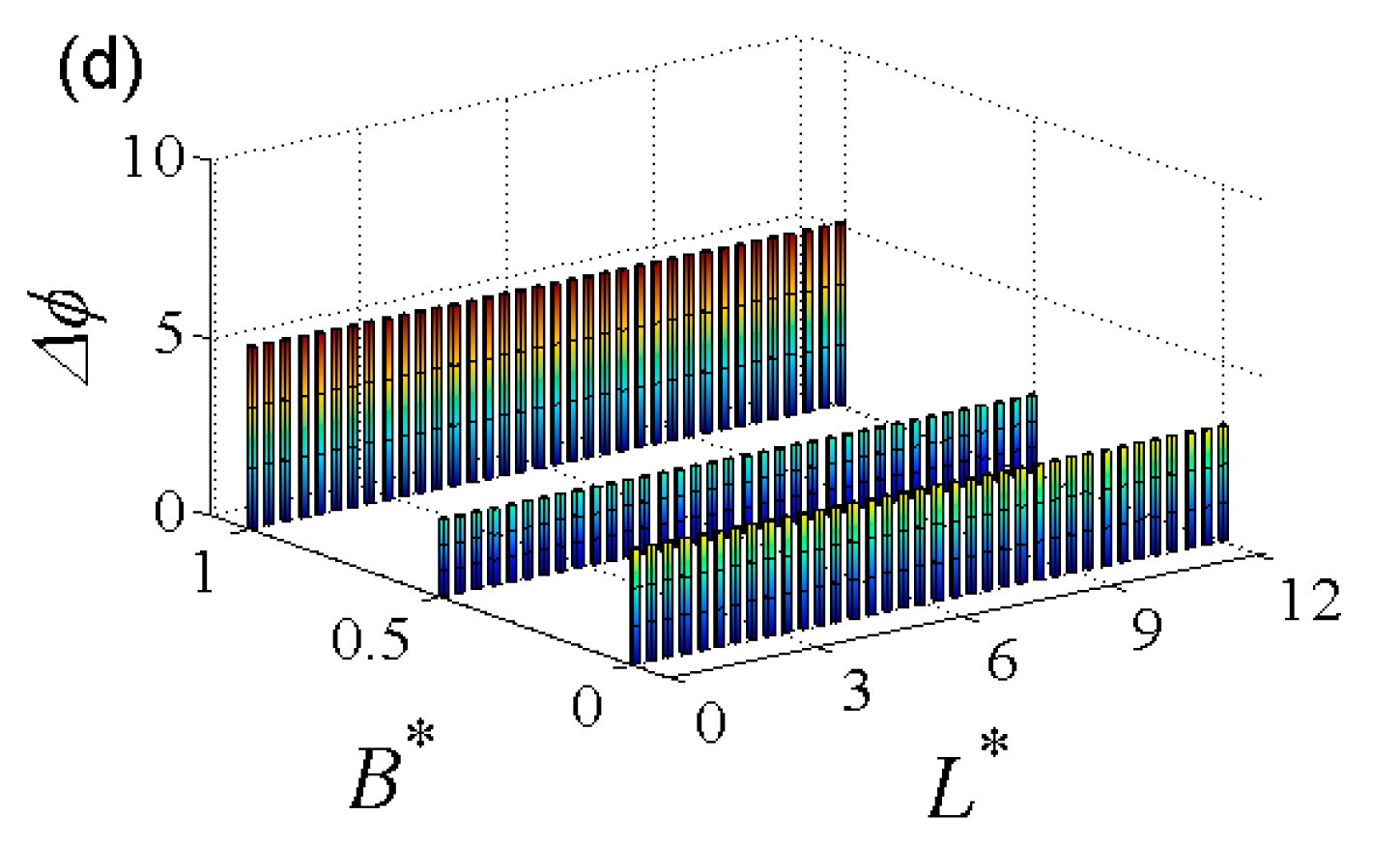
Figure 6b,c. Along the transverse direction, the wave power extraction from the three rows PTOs decreases while the displacements for energy harvesting system at the positions of the three rows are almost the same which seems not correct. When we reexamine the expression of wave power extraction (20), it is easy to find that the phase differences between the motions of buoyance columns and the corresponding position’s platform has an effect on the wave power extraction. We define the phase difference
, where
denote the initial phase for the
i-th buoyance column and the platform located at
.
Figure 6d shows the corresponding phase differences. Similar to the above three subfigures, the phase differences are only variable along transverse direction, and the phase differences of the three rows are about
respectively. For the first row, the phase difference is about
which means that motions of the buoyance columns and the platform are almost anti-phase, so the wave power is larger than the other two rows even if the displacements of the buoyance columns and the platform are the same. Comparing
Figure 5a and
Figure 6a we can see that wave power extraction from the PTOs of the first row and(or) last row along the direction of wave propagation is many multiples larger than that from other rows. And the total number of the PTOs at upstream and downstream rows for the beam sea condition
is much larger than other wave conditions due to the rectangular structure. So the wave power extraction at wave angle
is greater than that at other wave angles which has also been revealed in
Figure 3.
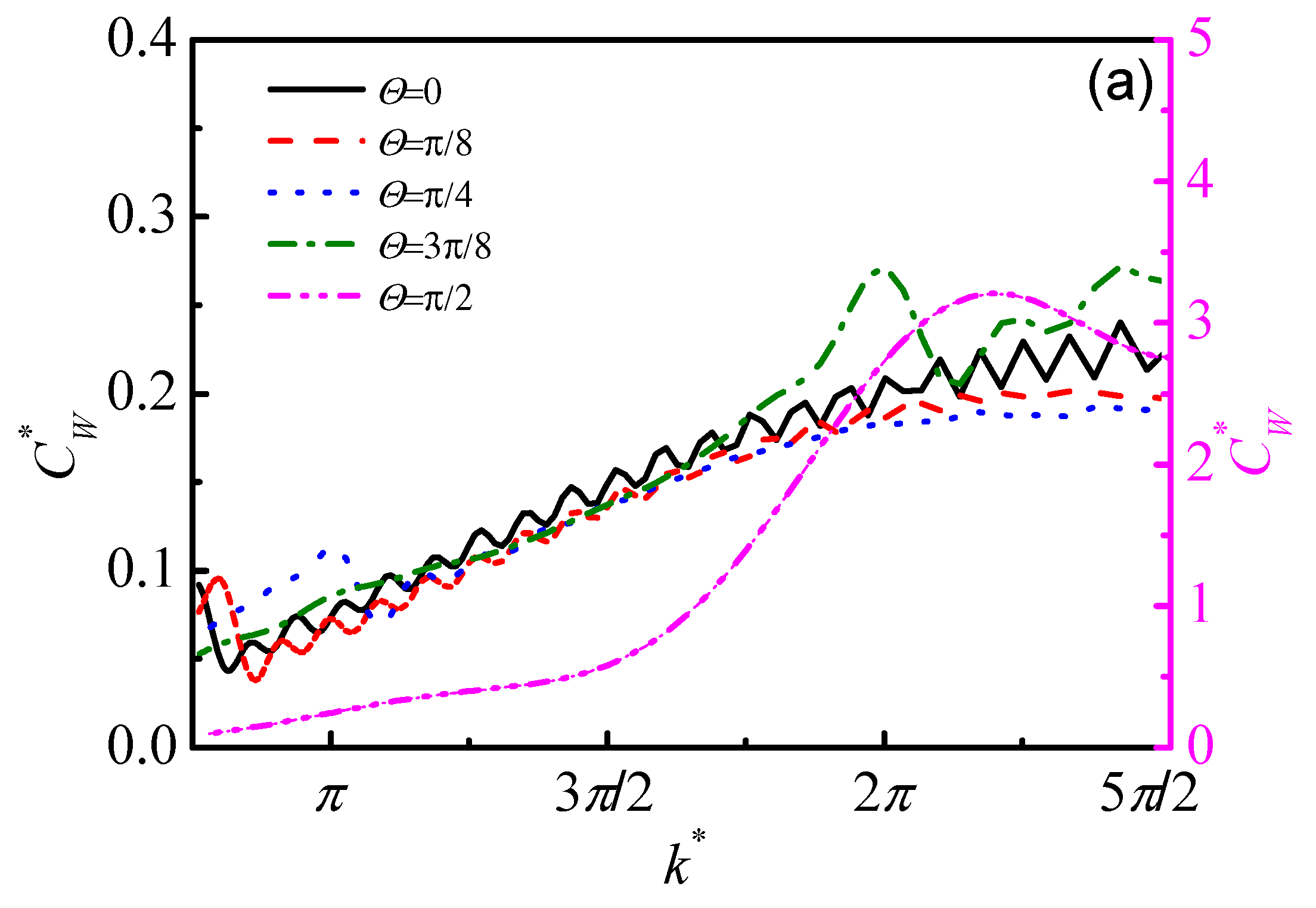
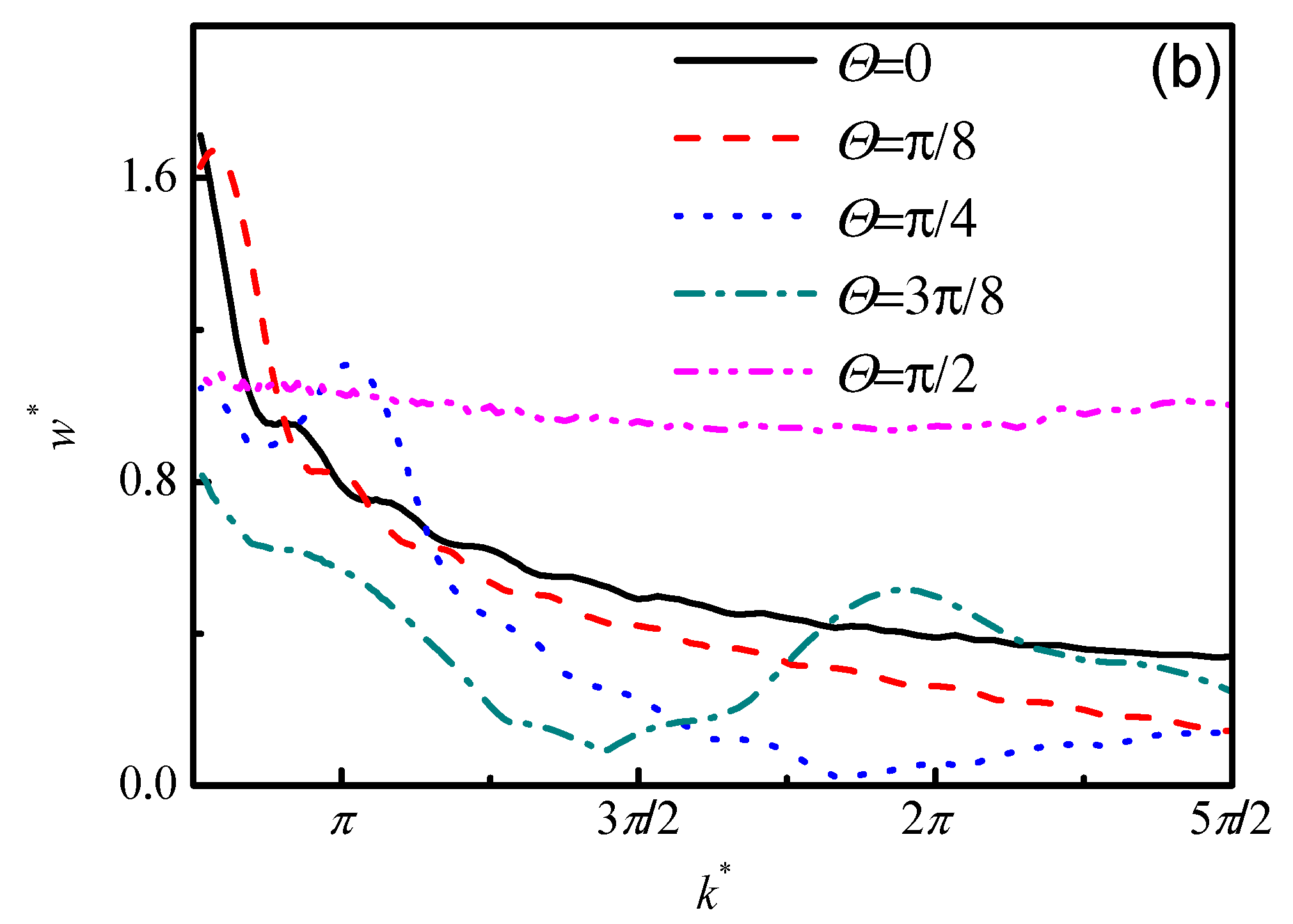
Figure 7 shows the capture width and the maximum amplitudes of the energy harvesting system under the change of dimensionless wave number
for five incident wave angles
. Due to the different orders for the wave angle
and any other wave angles, the two vertical axes are used in
Figure 7a. From
Figure 7a we can see that the capture width for wave angle
is larger one order of magnitude than other four wave angles which is determined by the phase differences analyzed in above paragraph. The capture widths for different wave angles all increase with the increase of wave number for the five wave angles. In fact, the small wave number in
Figure 7 corresponds to a larger wave length which is much larger than the spacing length for the array of buoyance columns.
For this reason, the motions for adjacent columns are almost in phase for small wave numbers and the fluctuation for the platform deformation is also weak [
20]. Thus the capture width is small for small wave numbers. For the deformation of the platform shown in
Figure 7b, the maximum amplitudes almost all decrease with the increase of wave number. The different evolutions between the capture width and the amplitudes of the platform may be also caused by the phase differences revealed in
Figure 6.
Comparing
Figure 7a,b, we can see that the capture width and the response amplitude have tiny peaks for wave angle
at about
and for wave angle
at about
. According to the definition for the non-dimensional wave number, the wave number
and
are corresponding to wave length
and
respectively. According to the above analysis, we can draw a conclusion about the characteristics of the wave energy harvesting system in regular seas. The system can capture much larger wave energy at a wave angle
.
In order to extract more wave energy, the PTO should be designed with a large damping coefficient. It is worth noticing that the stationarity of the platform is relatively worse for beam sea conditionss, although the wave energy extraction is superior. For a practical engineering application, we should consider the constraint values of the system parameters to balance the requirements for different functions when we design the wave energy harvesting system.
The results above are all under regular wave conditions, while realistic wave conditions are irregular. With this motivation, the results about wave energy capture of irregular waves for a significant wave height are analyzed in the following paragraphs.
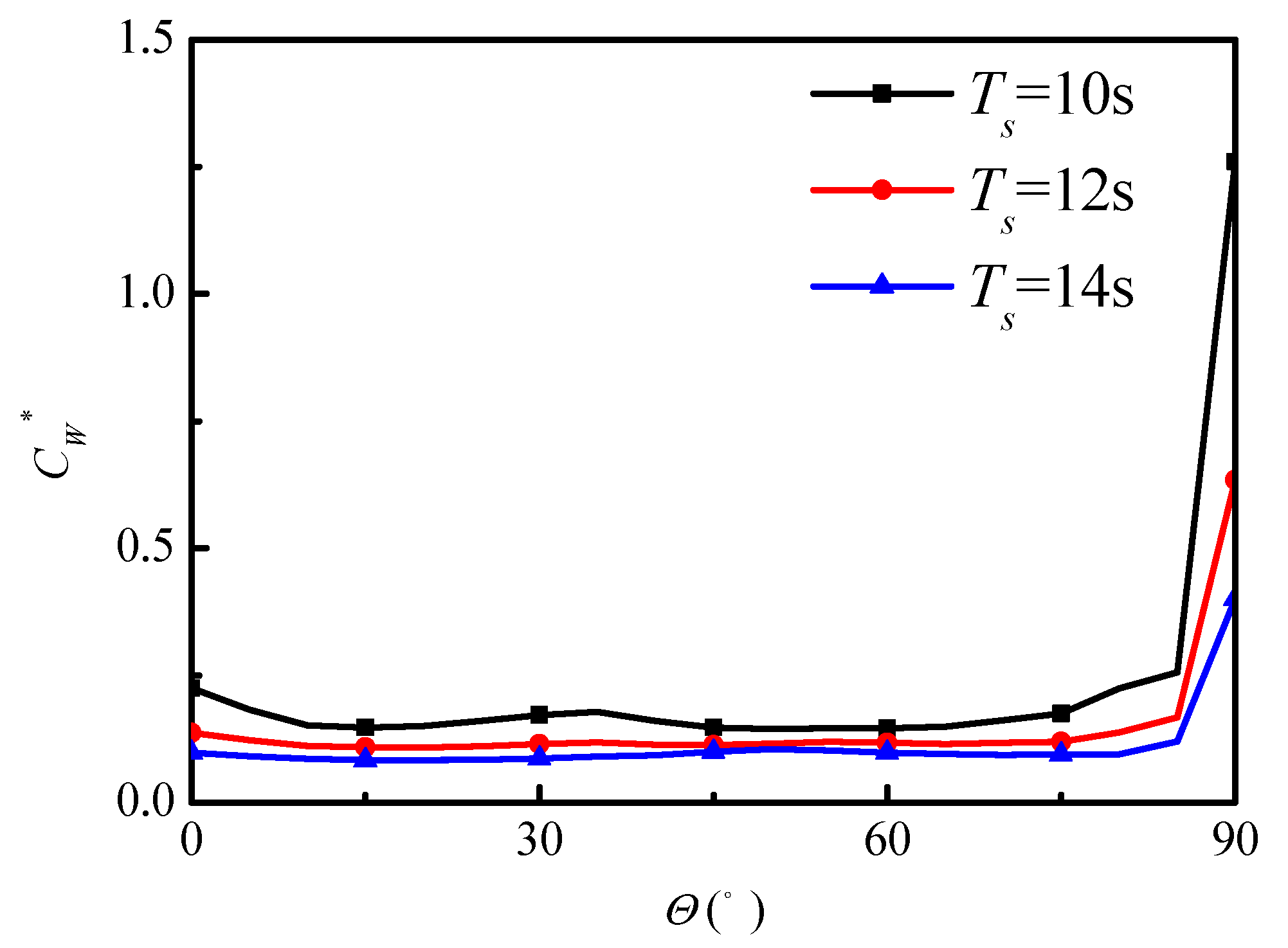
Figure 8 illustrates the capture width under the change of wave angle with stiffness coefficient
and damping coefficient
. With the increase of wave angle, the capture width appears small fluctuation in the interval of
and has a leap at wave angle
which is similar to that of the regular wave conditions shown in
Figure 4a With the increase of significant wave period, the capture width decreases for different wave angles that coincides with the trend for regular wave shown in
Figure 7a. In comparison with
Figure 4 for regular waves, the trend of the capture width for irregular waves is the same with that for regular waves.
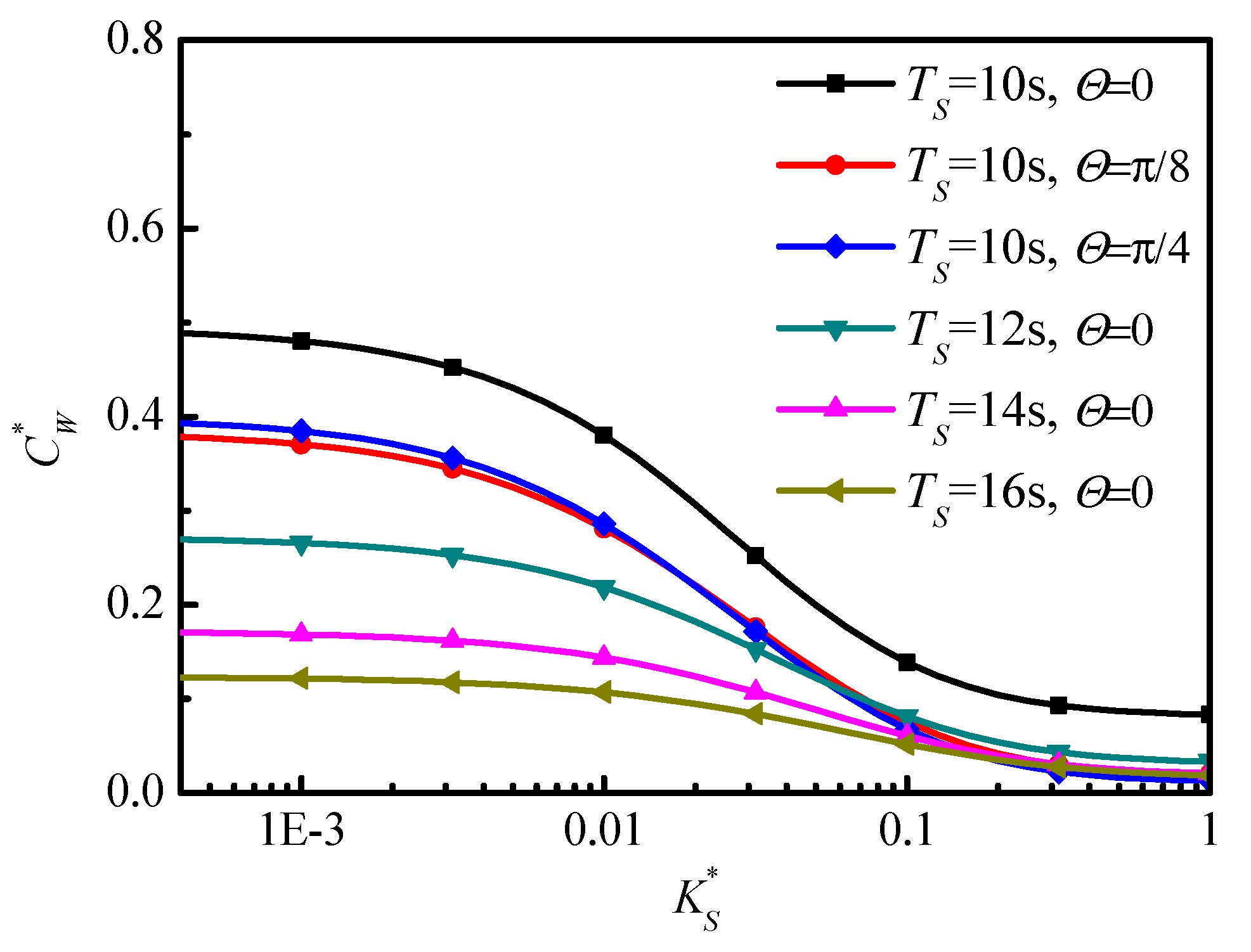
Similarly, the effects of connector’s stiffness and the PTO’s damping on the capture width also illustrate for irregular wave, shown in
Figure 9 and
Figure 10. With the increase of stiffness coefficient of the connector, the capture widths decrease firstly and then reach constant values for different wave angles and significant wave periods.
The reason for this phenomenon is that the relative motions between the plate and the buoyance columns are restrained with the increase of the stiffness of the connector. With the increase of significant wave period, the capture width decreases for different connector stiffness coefficients which has also revealed in
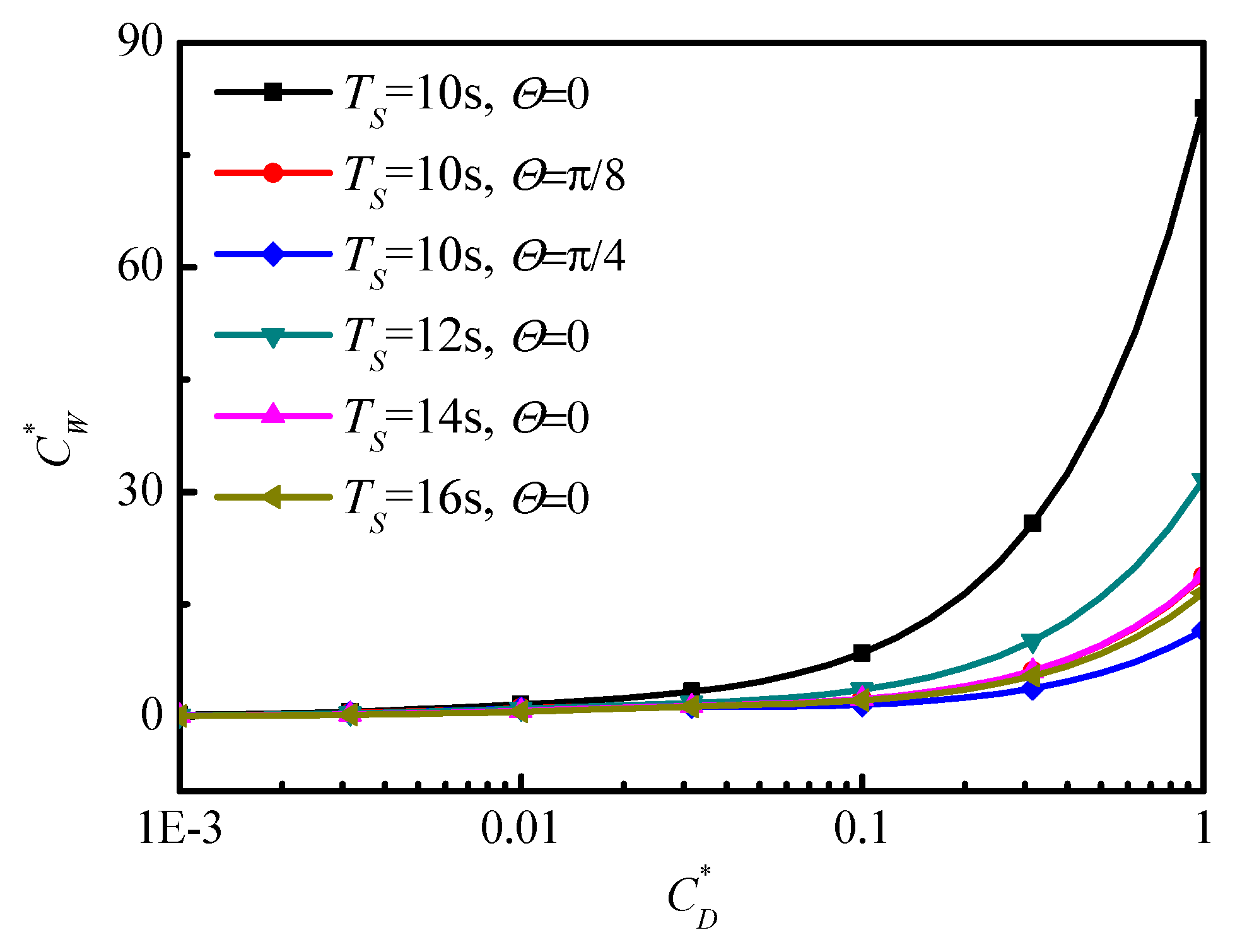
Figure 4a for regular waves. For the effect of the damping coefficient on capture width shown in
Figure 10, the capture width increases with the increase of damping coefficient. The general trend of irregular waves is similar to that of regular waves while there is no small peak for irregular waves in comparison with
Figure 3. For the different wave angles
with significant wave period
, the capture width decreases with the increase of wave angle (note that the red line with circles for wave angle
overlaps the pink line with up triangles for the significant wave period
shown in
Figure 10).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}