3. Approximate Solution of the System
The system of equations of the IG is usually used to perform a computer simulation rather than to obtain an analytical solution. However, the latter, although approximate, can contribute to a general understanding of the IG characteristics.
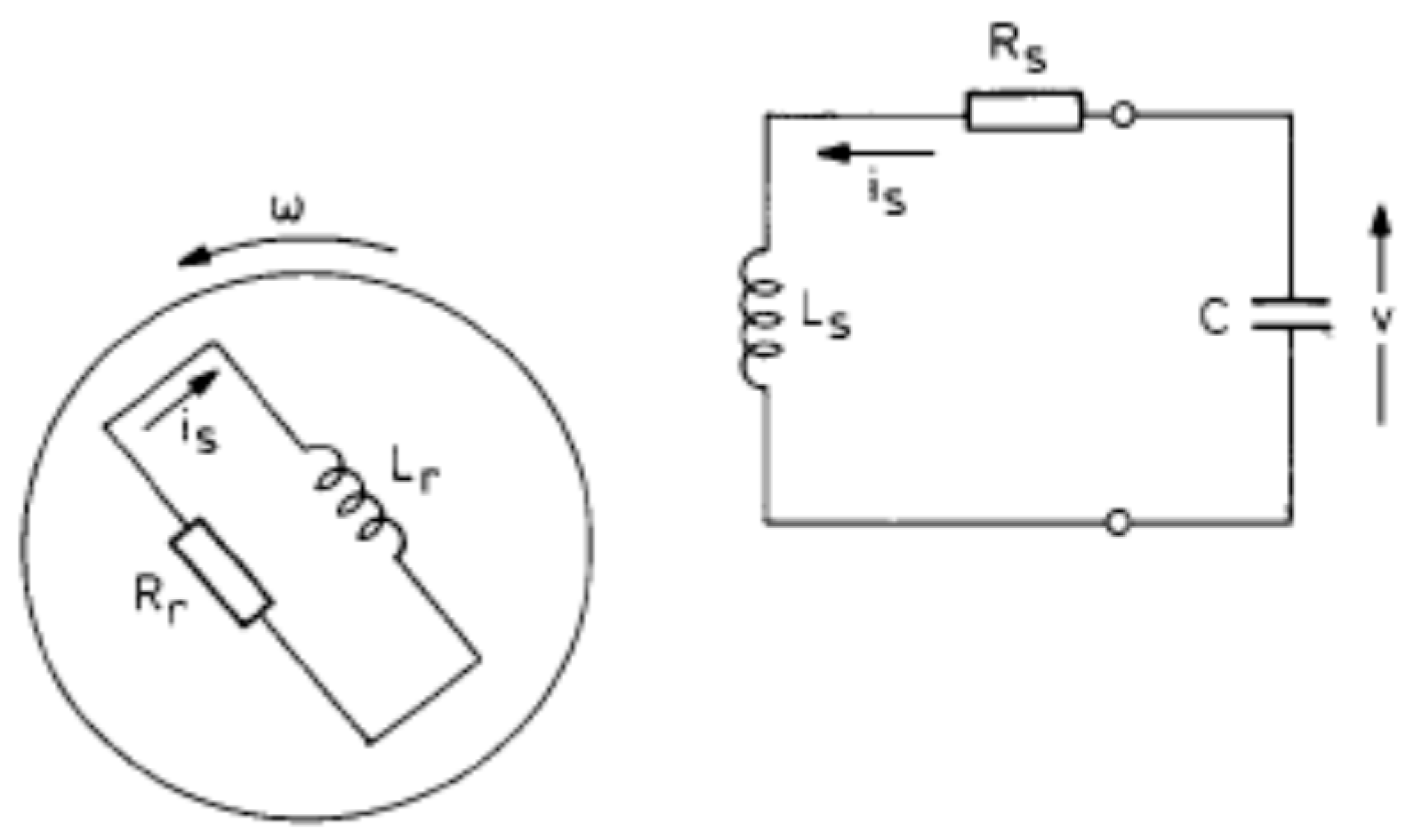
The analytical solution is obtained in this section for the steady-state case. It is supposed that in the steady-state condition, the stator current is a sinusoidal wave. This supposition is further validated by the experimental results, where the fundamental harmonic is taken into consideration. Furthermore, the stator circuit is an RLC circuit, a circuit consisting of a resistor (R), an inductor (L), and a capacitor (C), which attenuates high harmonics. Therefore, the stator current is deemed to be of the form
, where
is the stator currents wave frequency. From here, using this approximation:
Therefore:
As such, Equation (3) can be solved with aid of the known indefinite integral:
, however, this is not an absolute form. It is correct to use only if the machine is assumed to work from time −
. This is an approximation, which was used in Reference [
1]. It is hereby suggested to refine this approximation by using an absolute integral.
To acquire an absolute (for a finite time) integral, the integral
is evaluated. Now, another well-known trigonometric identity is used:
meaning,
. If one wishes to zero the contribution of the constant, k, in the equation, then:
Note and , so the integral will be split into two terms. In the first, while in the second, . It is impossible to select different start times for each part of the integral, leaving only the possibility of as the viable choice that will suit both parts of the integral in any case.
Selecting the start time to be 0 has another major advantage. The absolute solution of Equation (3) is not . In reality, it is . However, if the time frame is set from time , and if the machine is deemed “switched on” at this time, . So . For those conditions to be viable, if the machine is a wound rotor, three-phase machine, it is assumed that the fault occurred during a zero crossing. This is just an approximation, but remains as a possibility. Therefore, the integration constant zeros off exactly when the machine is deemed “started” at time , and .
As
, a small constant,
, will have to be added to the integral relative to Reference [
1]. Continuing the exploration,
Therefore,
with
. The conclusion that is the first major contribution of this work, is that the stator’s current first harmonic conjures in the rotor’s two harmonic components of the form:
as well as two evanescent components of the form:
These two components appear at the “switch on” (or fault) of the machine and subside quickly. More importantly, there are two frequencies of the harmonic components, namely .
To obtain the stator resistance, Equation (2),
, now needs to be resolved. As before,
and
had just been developed. The full resulting calculation is arduous and will be omitted here. However, a shorthand calculation is, if marking
and
, then:
From here, the identity
is used, omitting the arduous parts of the calculation, giving the result:
This is, of course, not the end. Next, the known identities:
,
are used, and in the end
and
are re-introduced. After simplification, the resulting formula is Equation (22):
This formula contains frequencies such as
; however, since it was assumed that only the basic harmonic appears in the stator, and this expression (or its derivative) appears as an additional term in Equation (2), only terms which relate to
need to be considered, as all other terms have already been inherently neglected. Therefore, for the approximation of the stator current, Equation (23) suffices:
which simplifies to:
This is the rebound effect of the basic harmonic of the stator current on
, which is used in solving Equation (2),
together with
and
. Arduous calculations follow, which yields the following equation:
Dividing to orthogonal terms multiplying
and
, the following formula is obtained:
so,
and
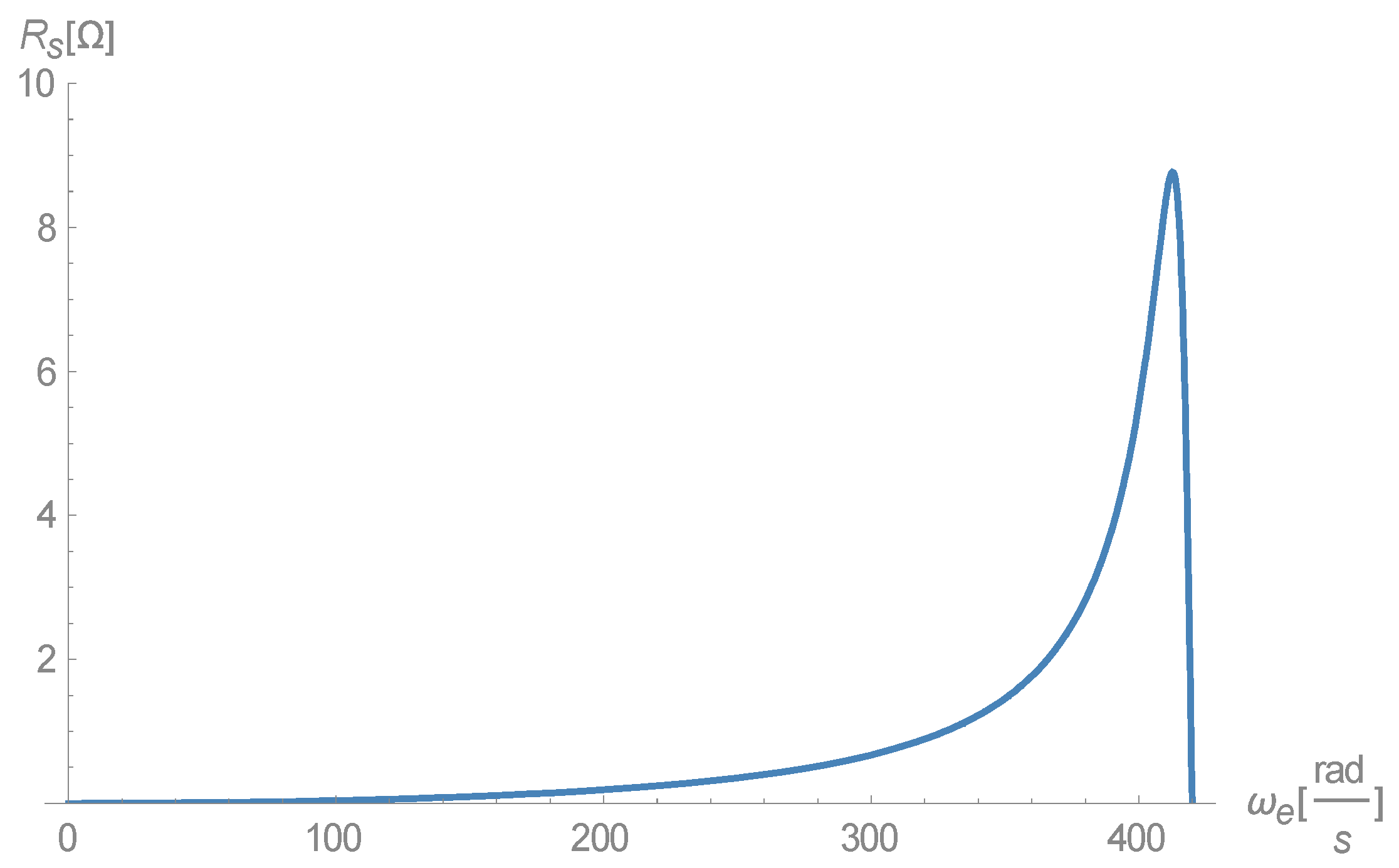
Equation (28) finally gives:
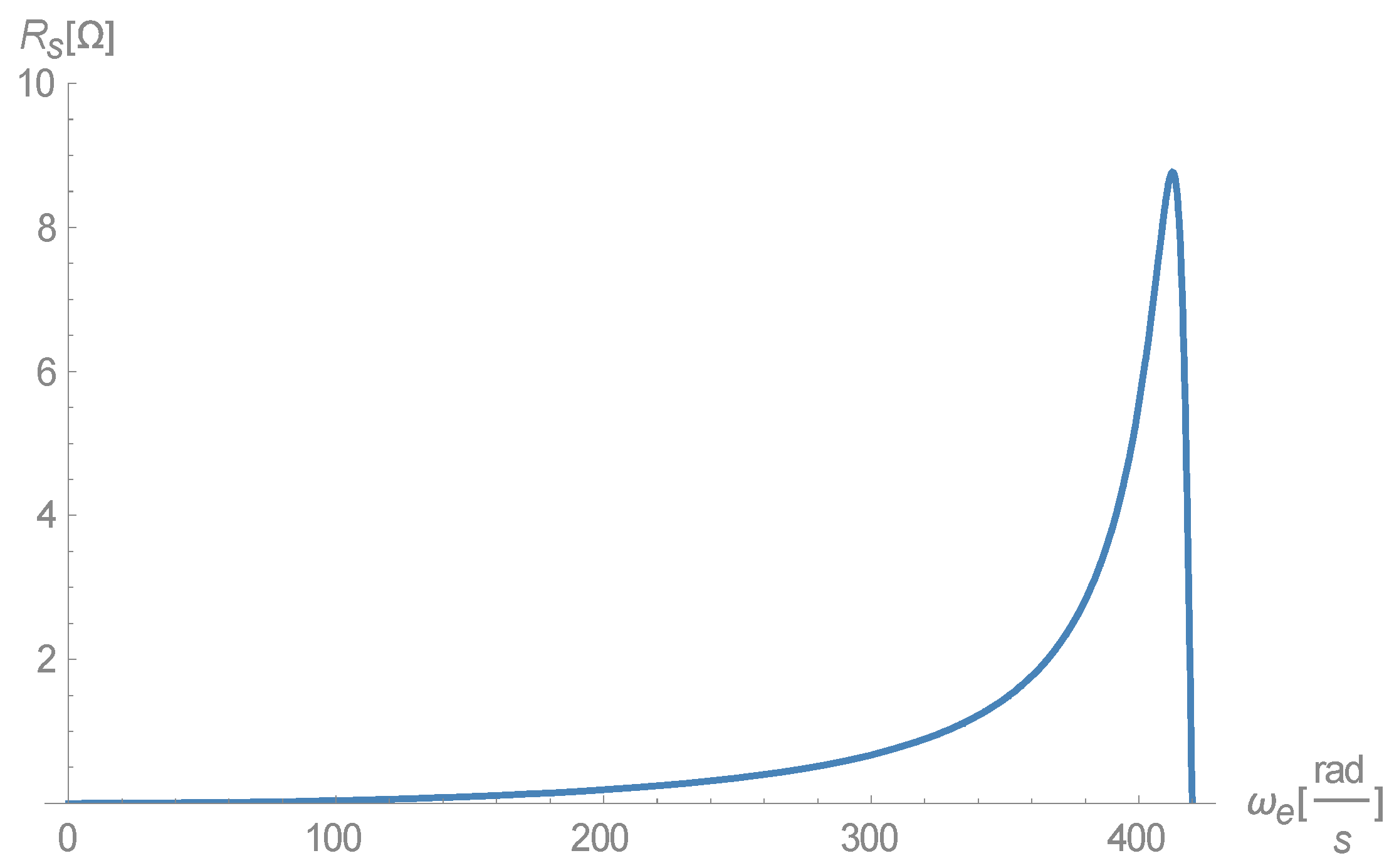
The substitution of
gives a result similar to the results described in a previous study [
1]. The resulting
graph is similar, and is given in
Figure 2.
However, this is not exactly the same graph. The difference between the results obtained in the previous study [
1] and the current offered
function is, analytically:
A plot of the difference between the two graphs shows it to be almost insignificant at these values, as shown in
Figure 3.
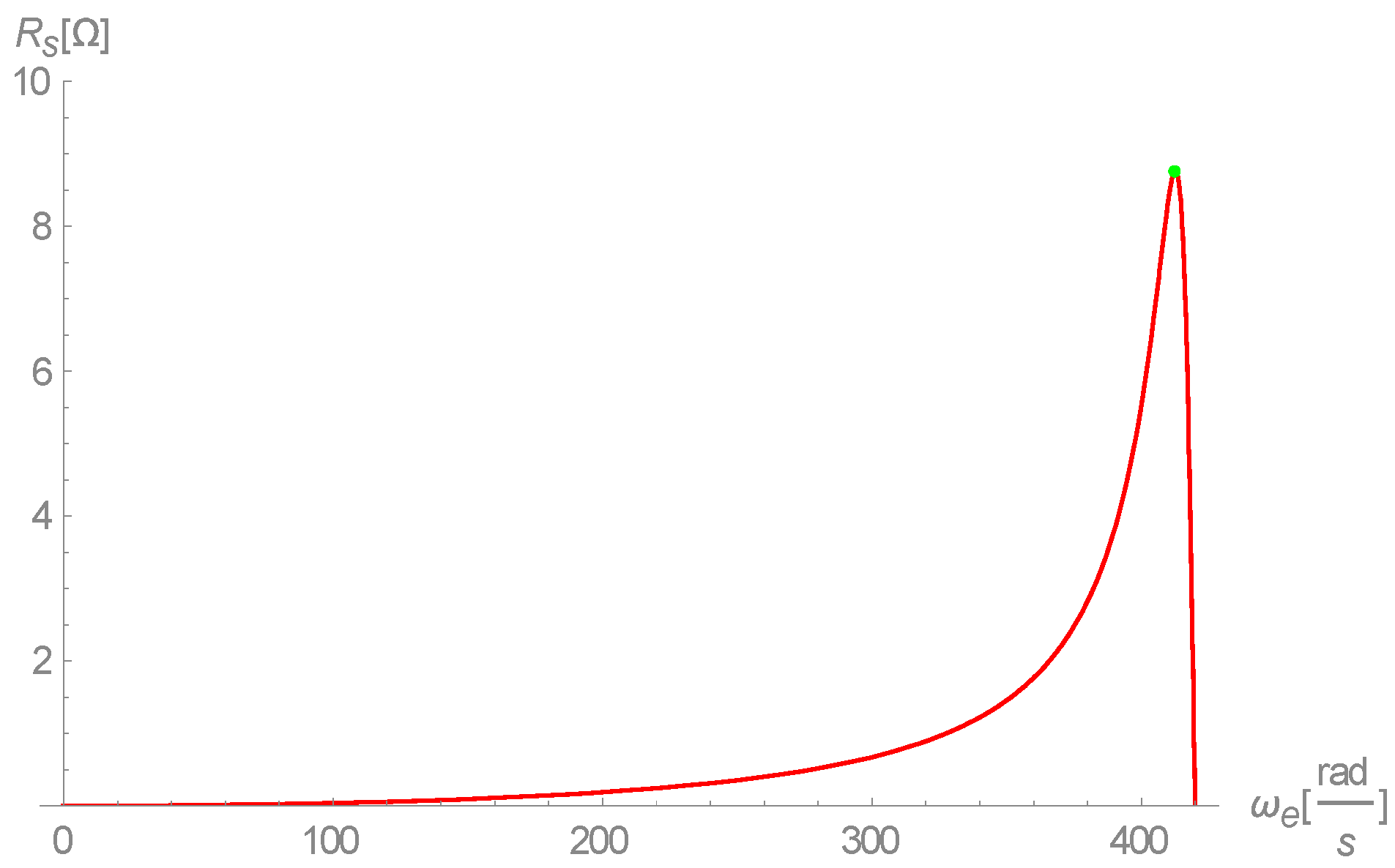
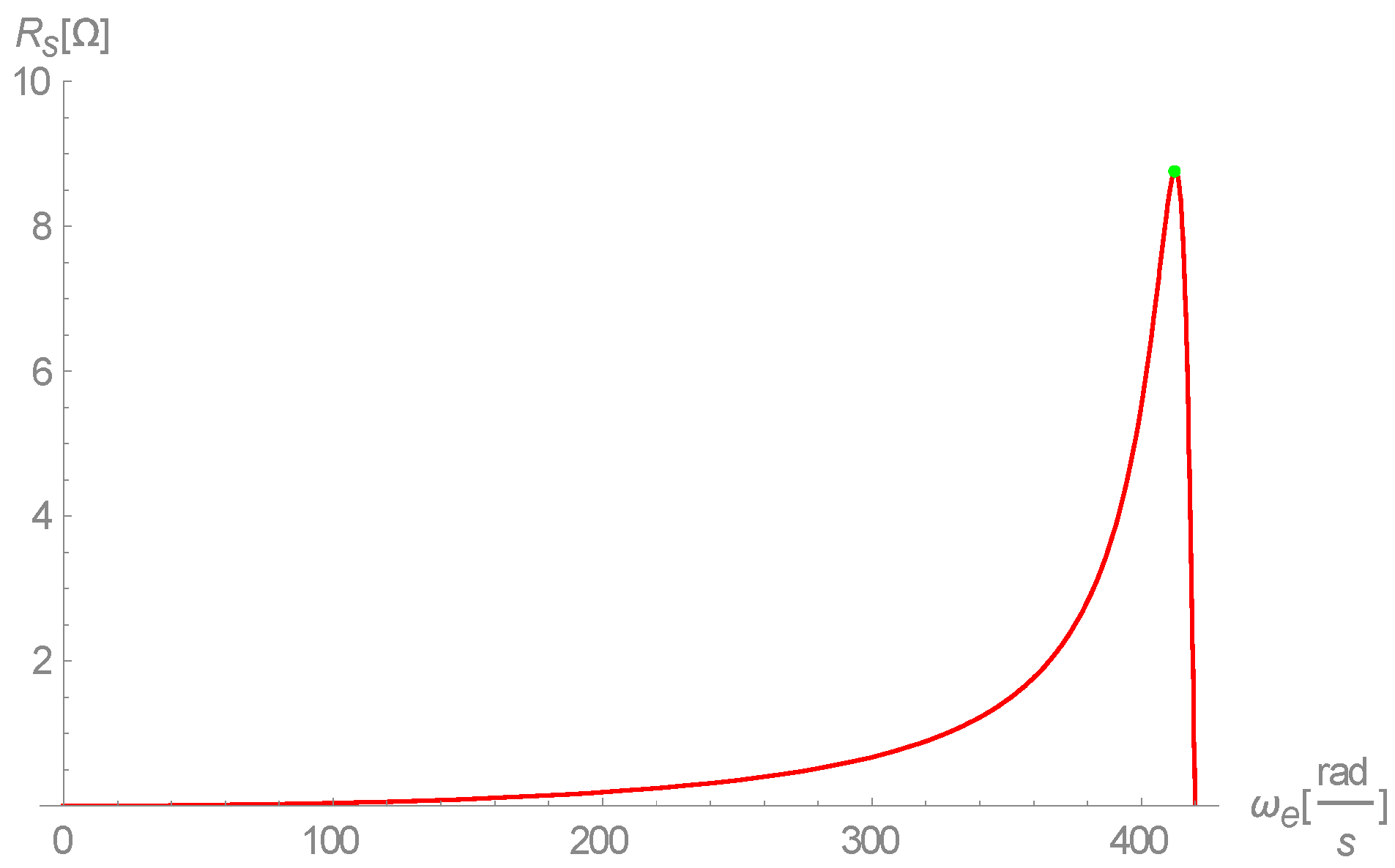
This difference could be more significant with other values. In any case, every value of
fits to two-field frequencies, the higher of which is in the stable region of the generator. Currently, research interest lies in finding an analytical formula for the single frequency at which
is maximal,
. This formula can be easily obtained from Equation (29). Derivation and equating to zero gives five solutions, only one of which fits the physical mode of the machine.
The negative solutions are not physical, nor is zero a valid solution. This leaves two solutions for : and .
However, the solution with the smaller denominator gives a frequency which is higher than that of the rotor. In short, it describes the machine working as a motor, but not as a generator. For example, with the parameters as before:
Therefore, the only physical solution is:
Maintaining parameters as before, this would yield .
Substitution of Equation (32) into Equation (29) results in:
which is an improvement to the equation in Reference [
1] (
). Practically, with the parameters designated as in a previous study [
1], the approximation from this study yields
, while by the previous approximations [
1], the value would be
. Therefore, the machine would cease to operate as a generator for a slightly lower value using the current approximation than previous results suggest [
1]. Combining the last results to obtain the curve in
Figure 4:
This result is more accurate than that given in Reference [
1], where it was approximated as:
4. Numerical Analysis on the Stator Current Frequency
The exploration of Equation (27),
, is more difficult than that of Equation (29). The aim here, as in previous analyses [
1], is to deduce the limits of
. Therefore, a solution for Equation (27) for
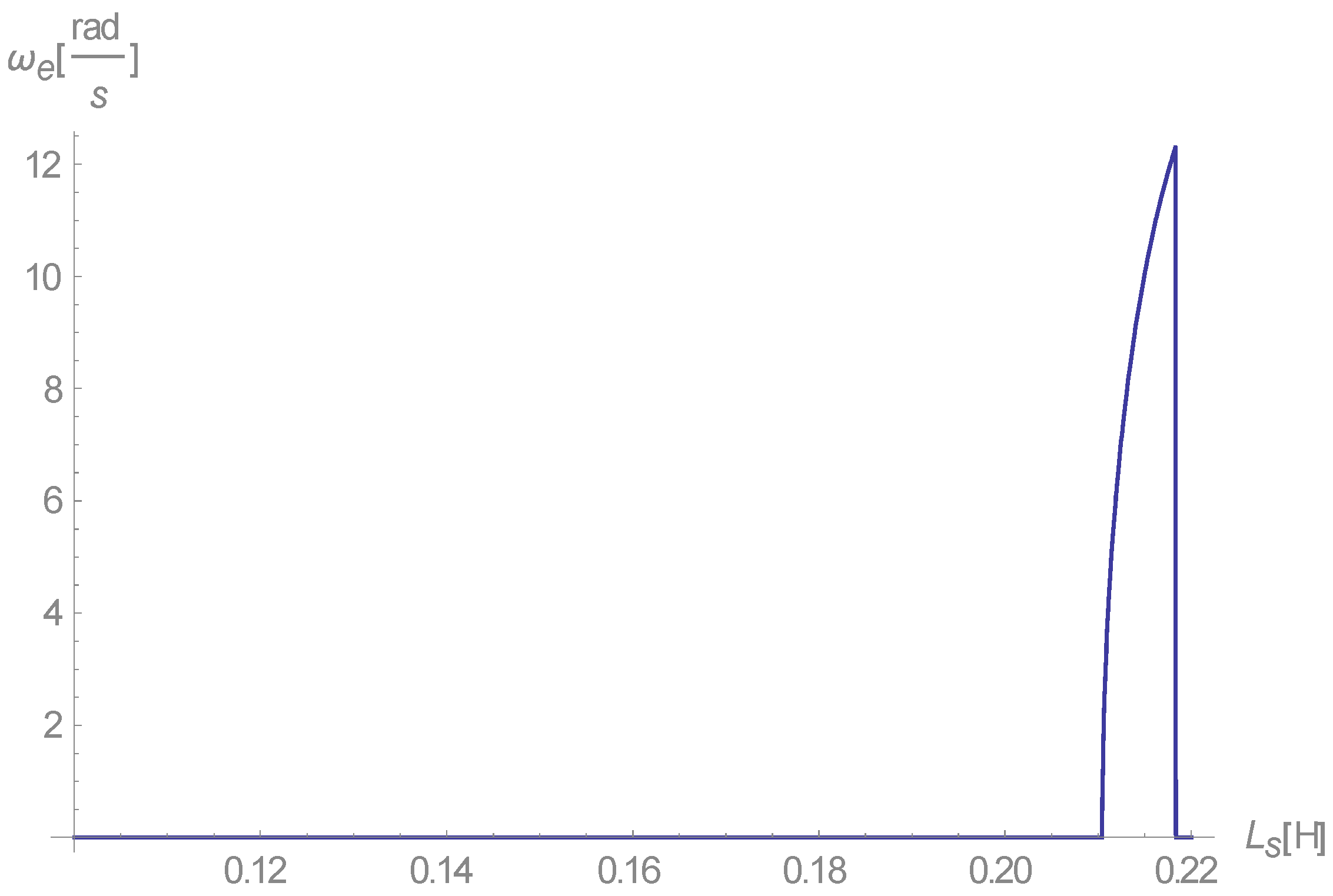
is required. This solution yields six huge multi-term solutions in positive/negative pairs, which can only be explored numerically under the same parameters as before. For example, using previous parameters, a plot of the imaginary part of the first solution of
(L
S) yields the curve depicted in
Figure 5.
This is simply not interesting, as with a zero or positive imaginary part, this solution is evanescent, and does not deliver a stable solution. Thus, the first solution does not satisfy our requirements.
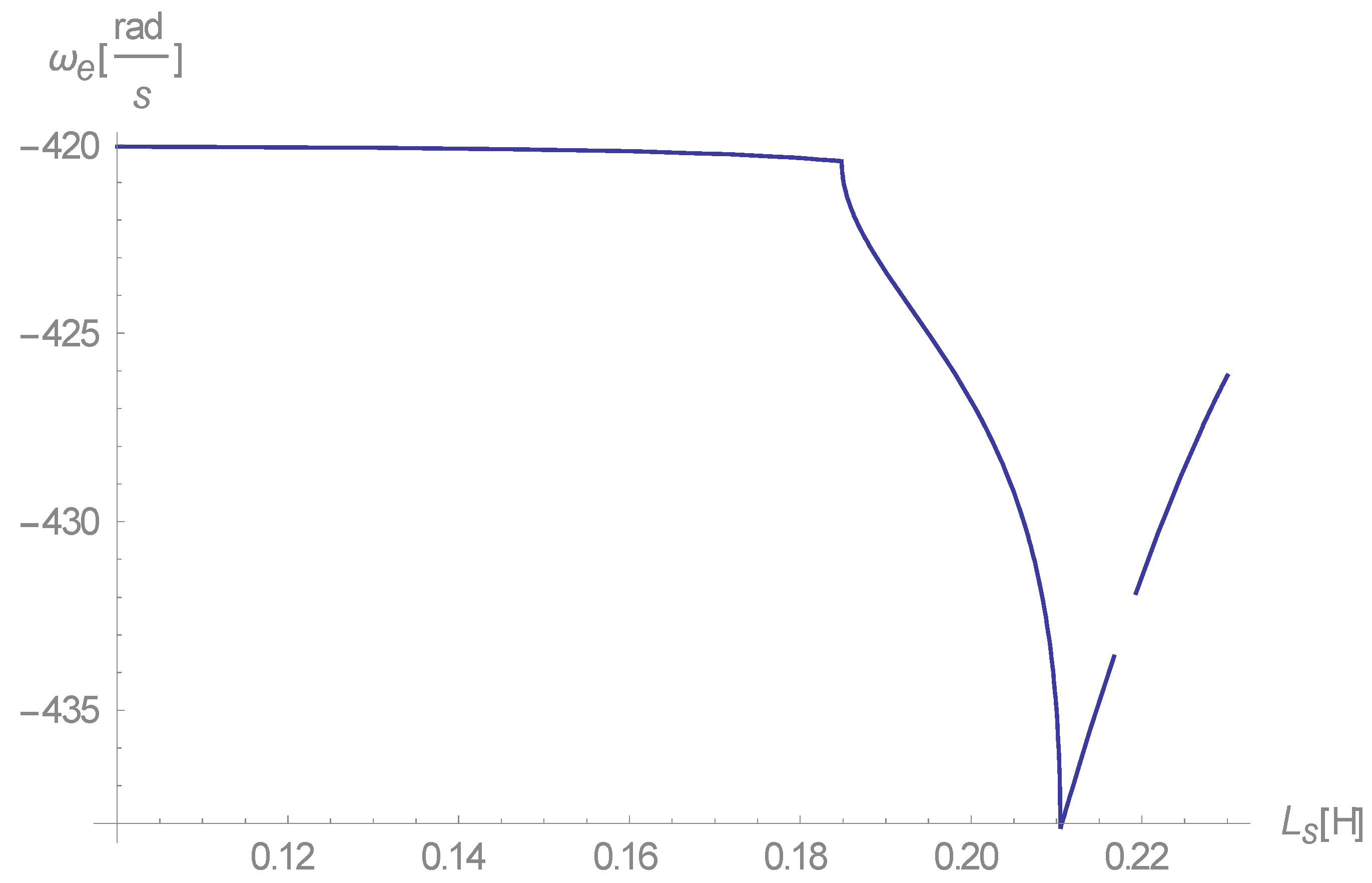
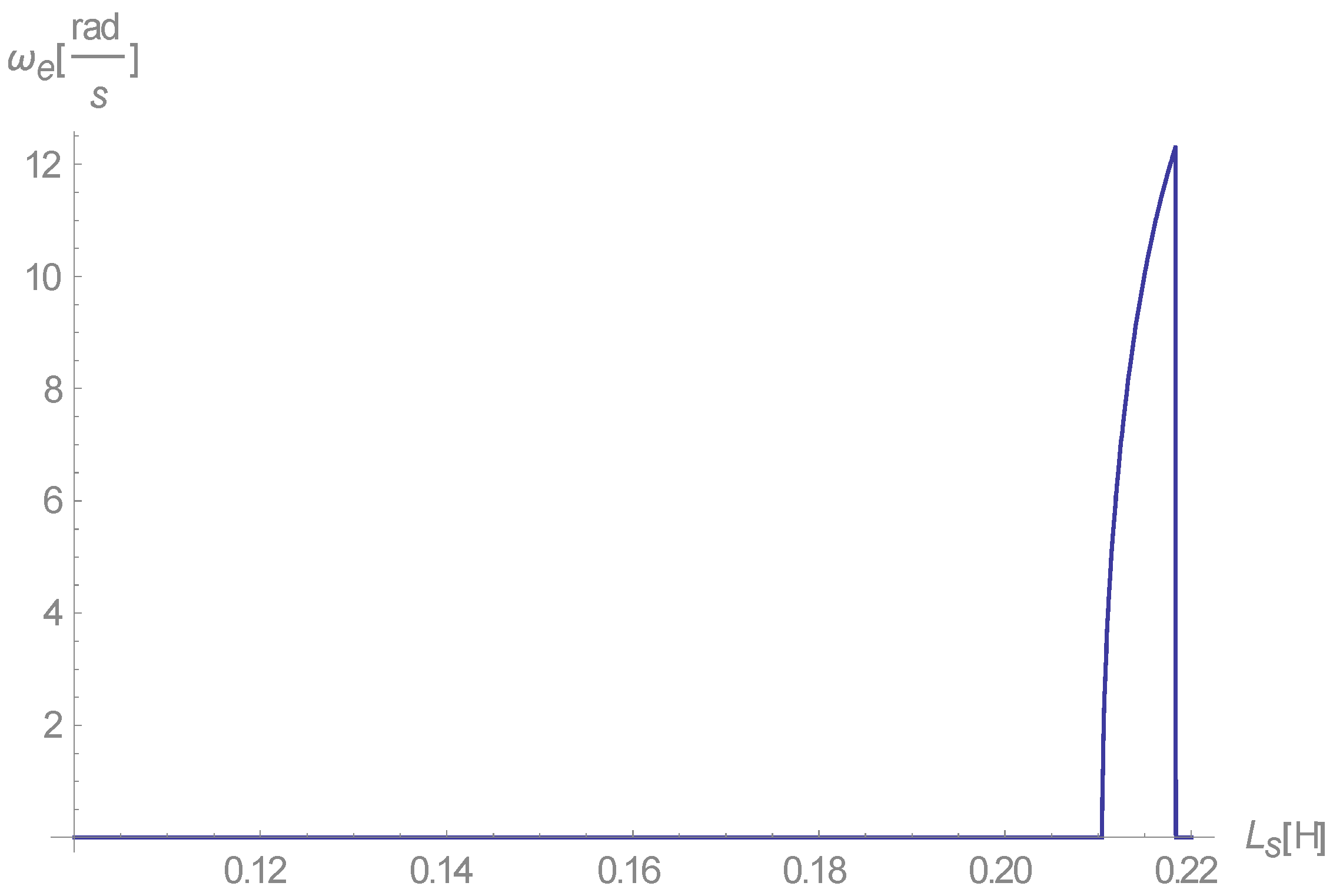
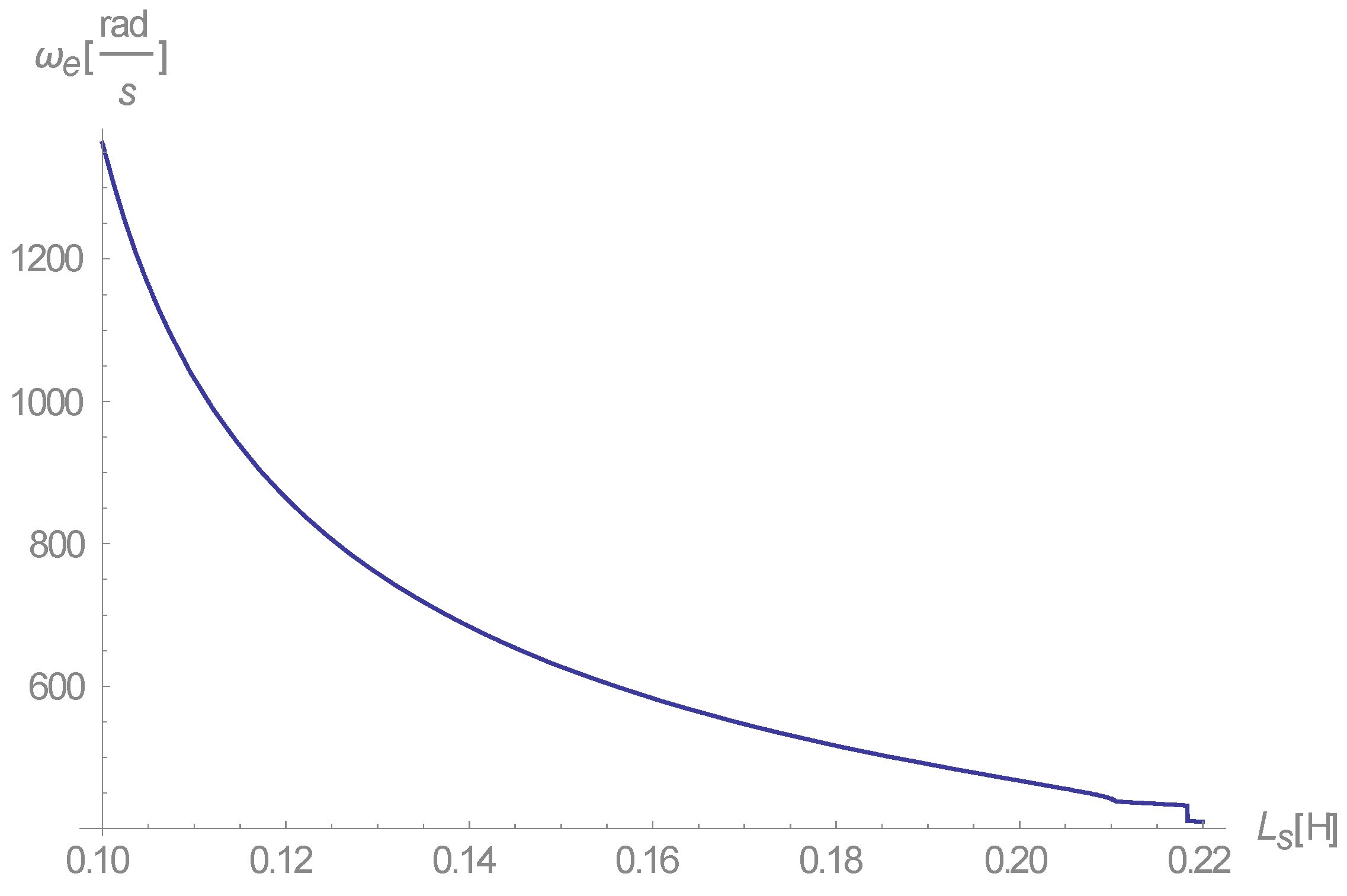
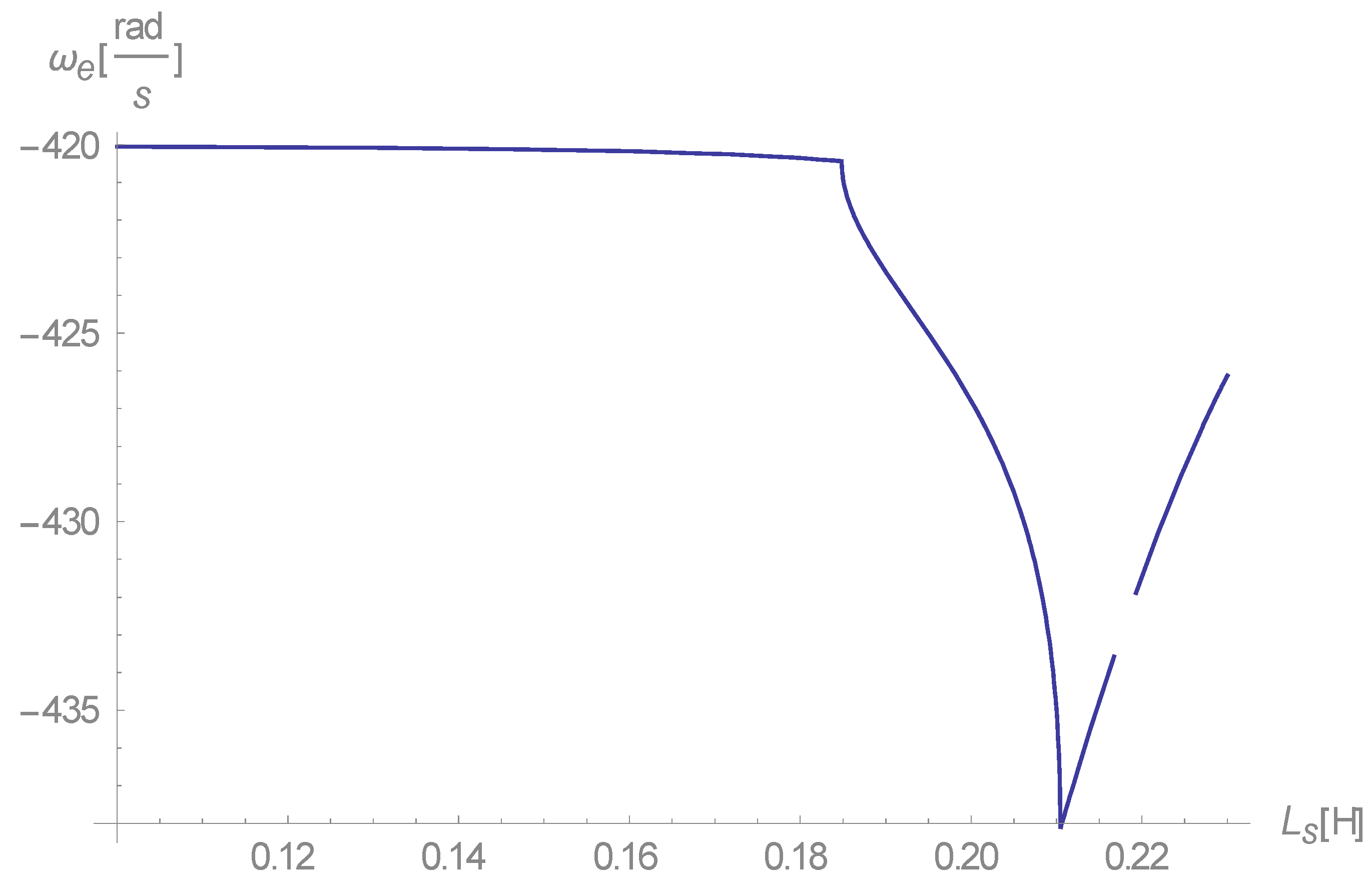
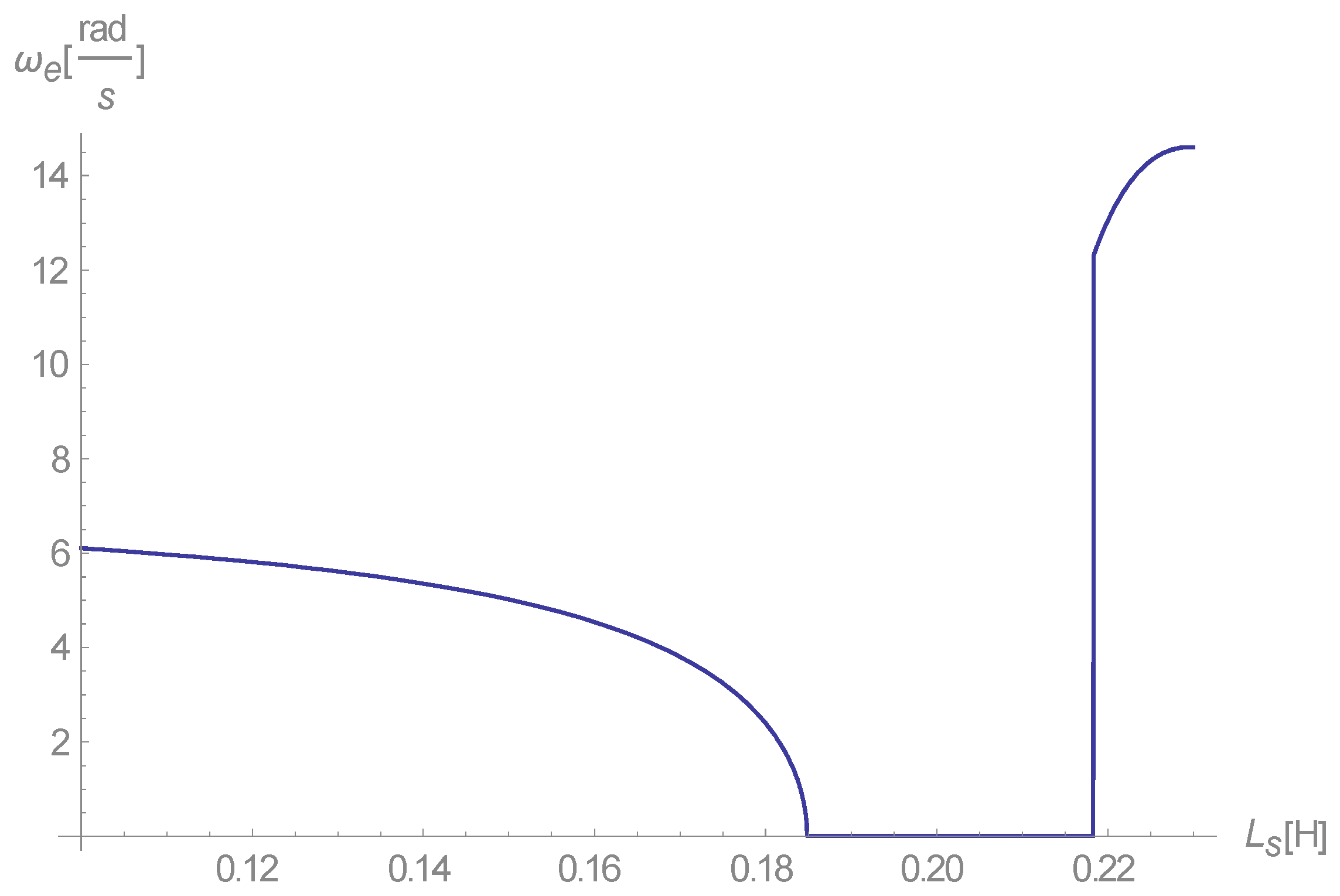
The second solution is more interesting, as its real part is depicted in
Figure 6:
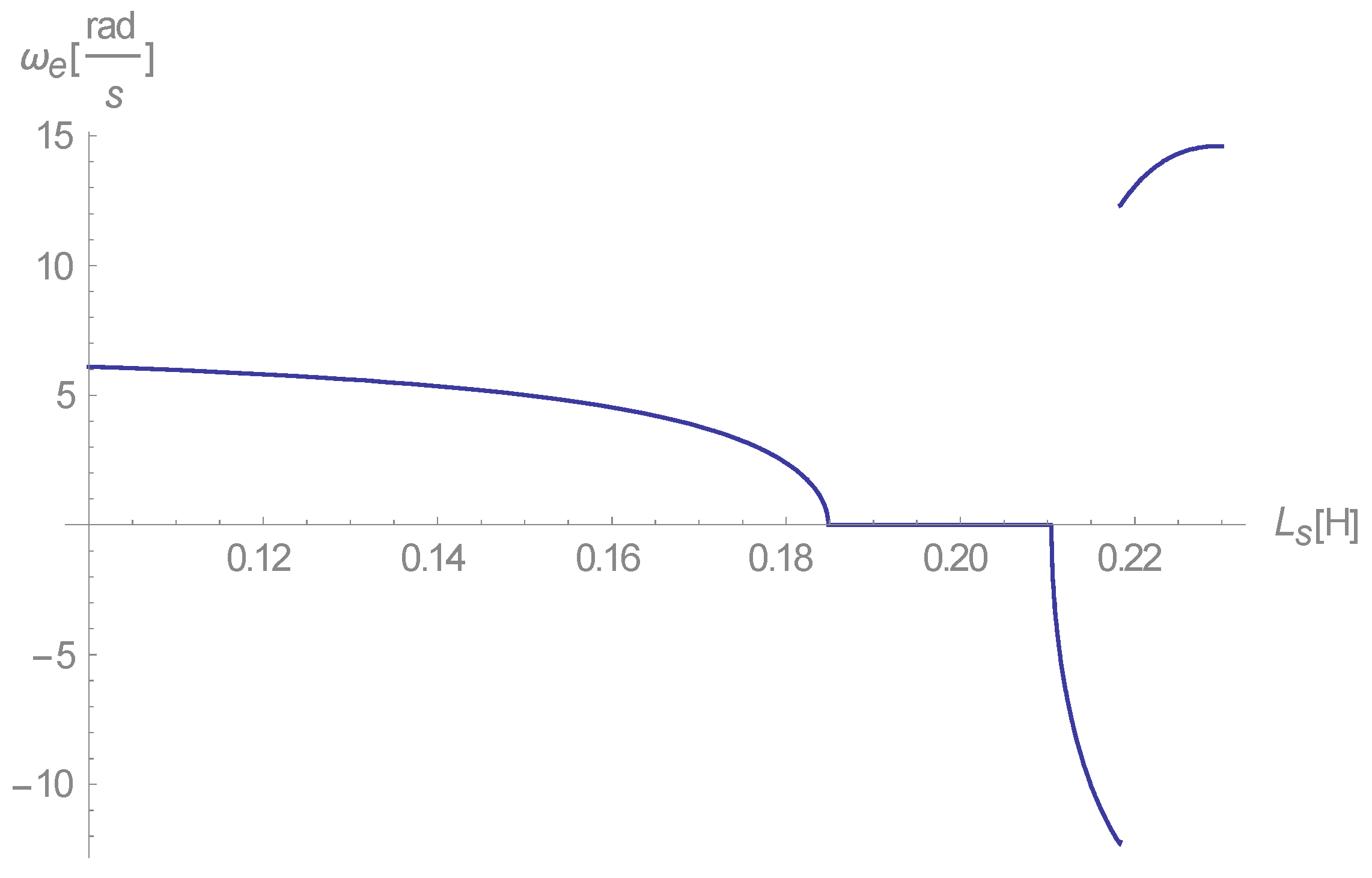
Overall, this curve (
Figure 6) is a description of a motor. At Ls = ~0.22 H, there is a dip to a stable generator mode, which becomes evident when viewing the imaginary part (
Figure 7).
The results shown in
Figure 6 and
Figure 7, which correspond to the second solution, represent the first solution that implies a stable generator mode.
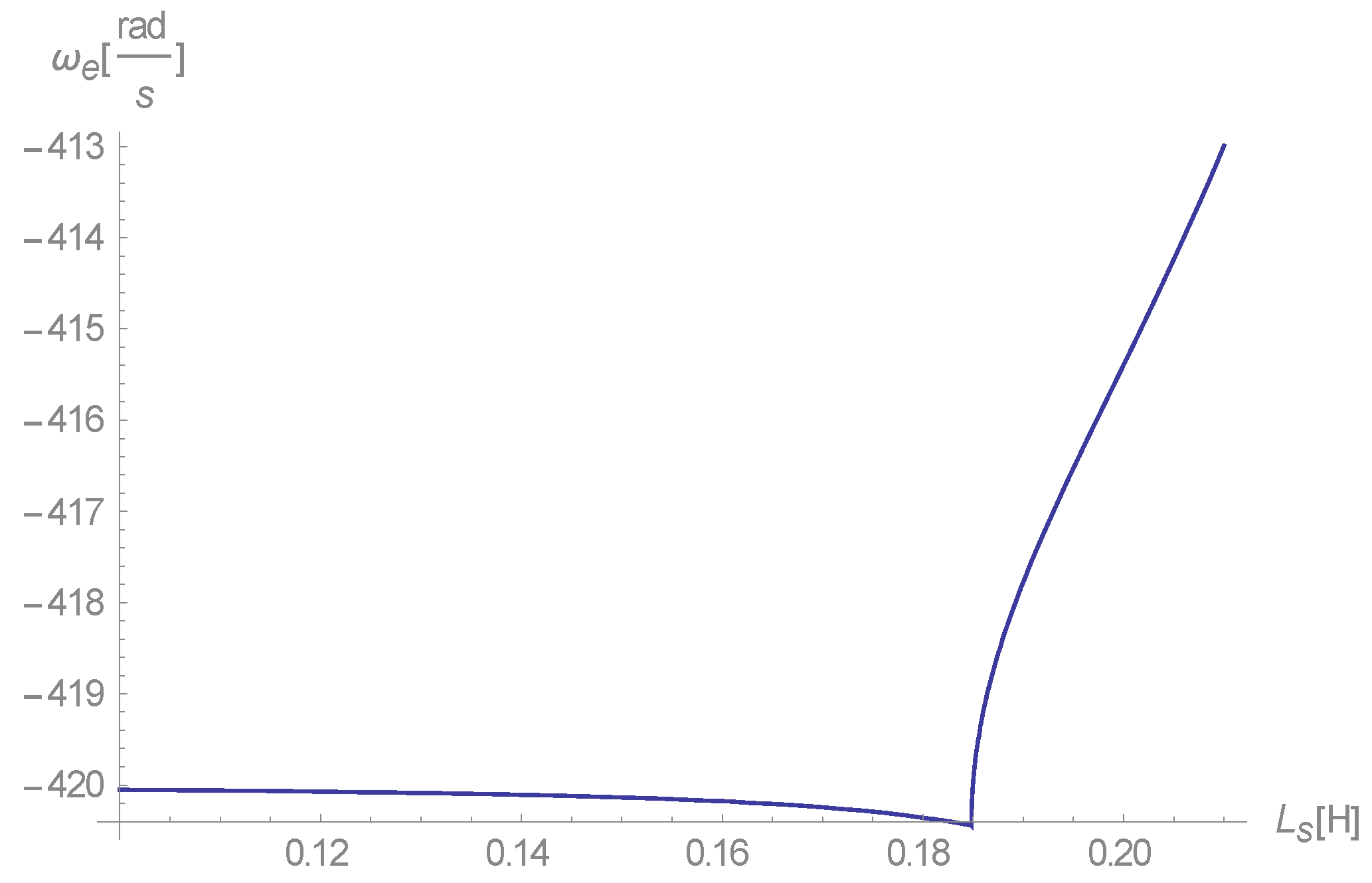
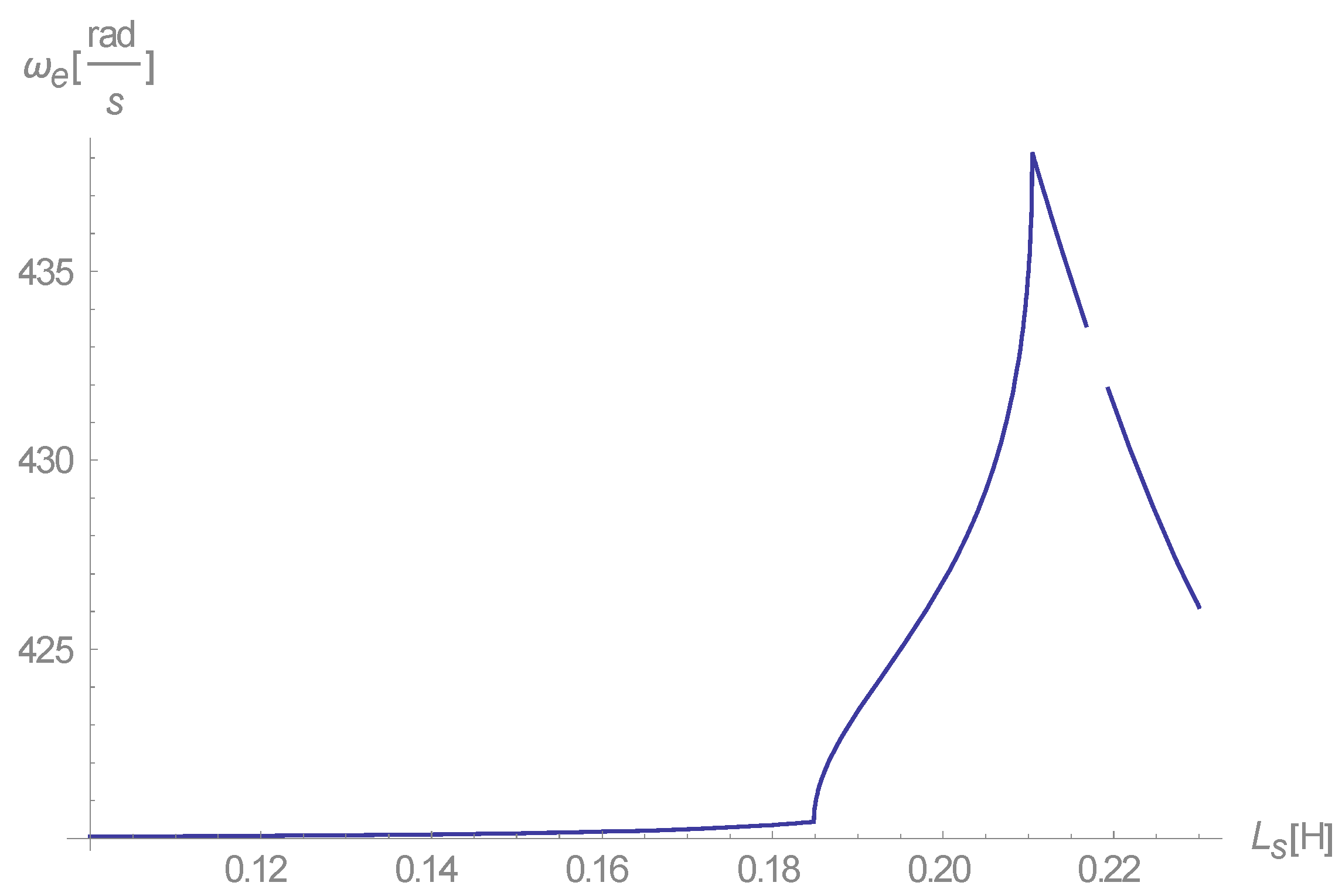
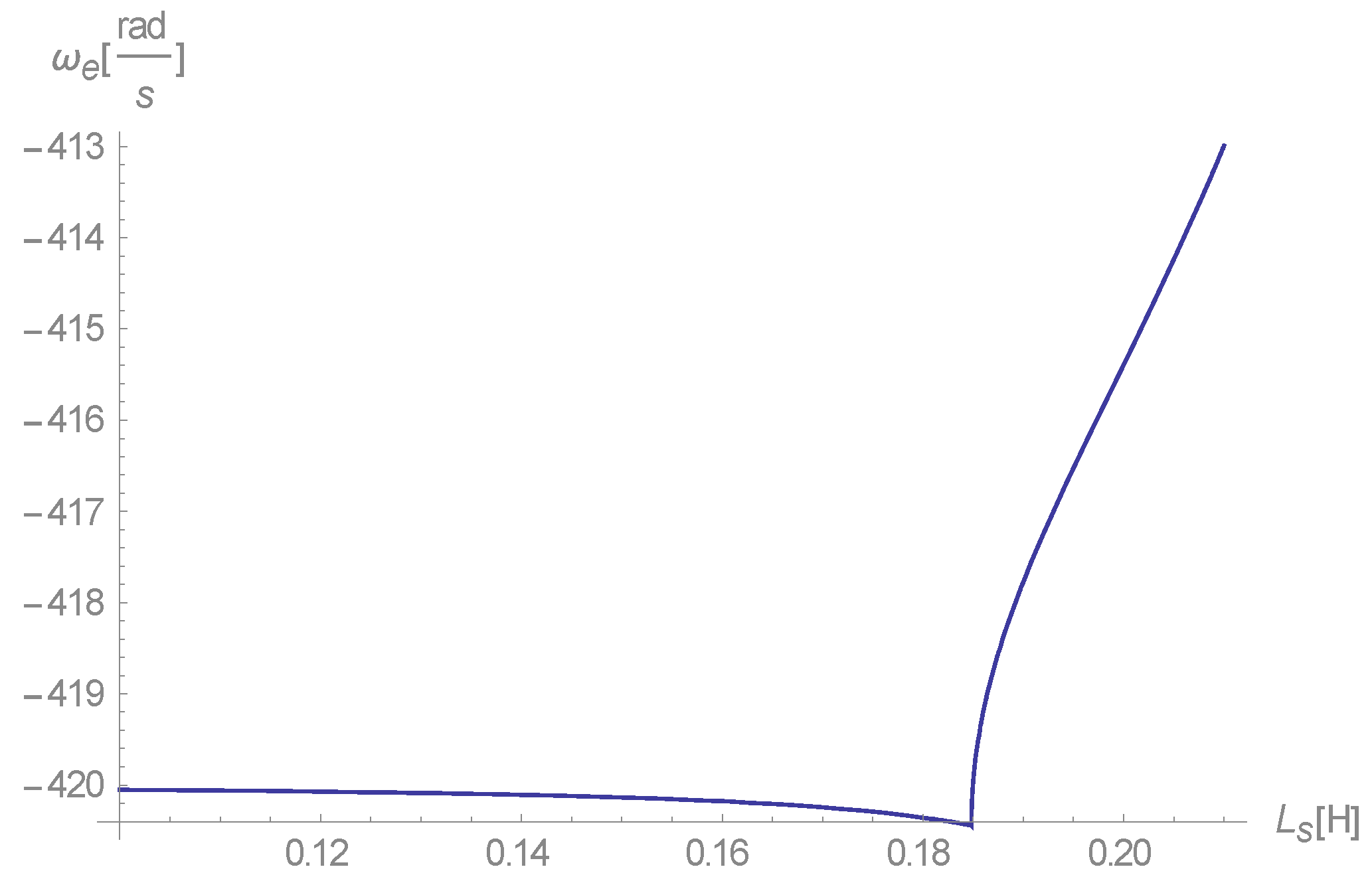
Solutions three and four are a positive-negative pair, as solution three has a real negative rotation (
Figure 8), and only a small interval of a negative imaginary part, as shown in
Figure 9.
However, the negative rotation strongly implies that this solution describes the action mode as a brake, rather than as a generator. Solution four fails to meet our requirements, as, similar to the first solution, its real part is demonstrated by the curve in
Figure 10.
Figure 10 depicts a motor, not a generator, as its stator current rotation speed is higher than the physical speed of the rotor (420 rad/s). Solutions five and six are, again, a positive-negative pair. Solution five gives real negative speed, making it uninteresting in the scope of the IG. Its real part is demonstrated in
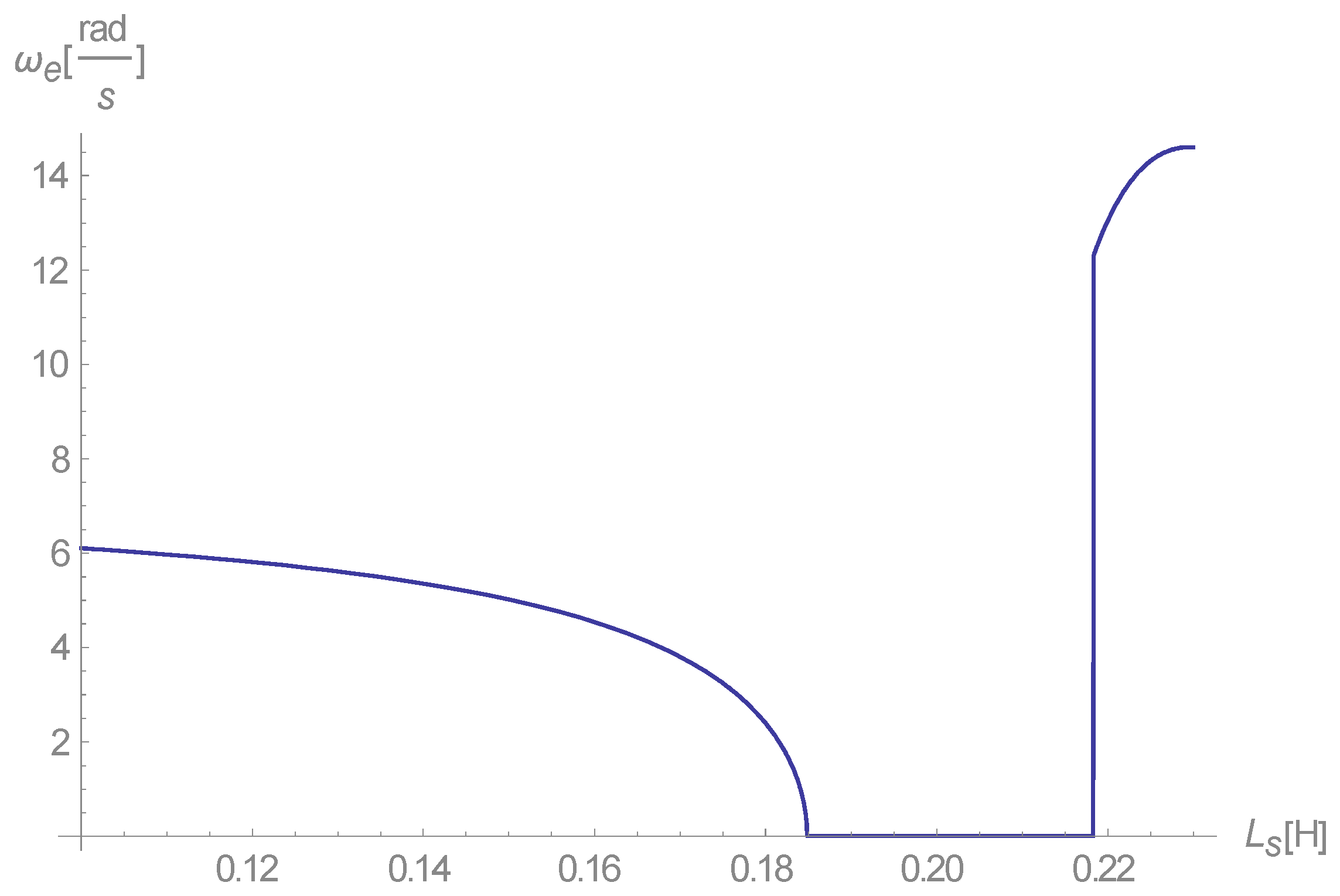
Figure 11. Solution six is not interesting either, as its imaginary part, using the same parameters, produces the curve shown in
Figure 12.
This solution has only a positive imaginary part, making it evanescent. Additionally, its imaginary part between to is zero, and as such no fluctuations at all are predicted by it in this range.
In short, solution two best describes a stable IG. However, the conclusion is that
is highly limited to the range above 0.21 H, maintaining the previously outlined parameters [
1].
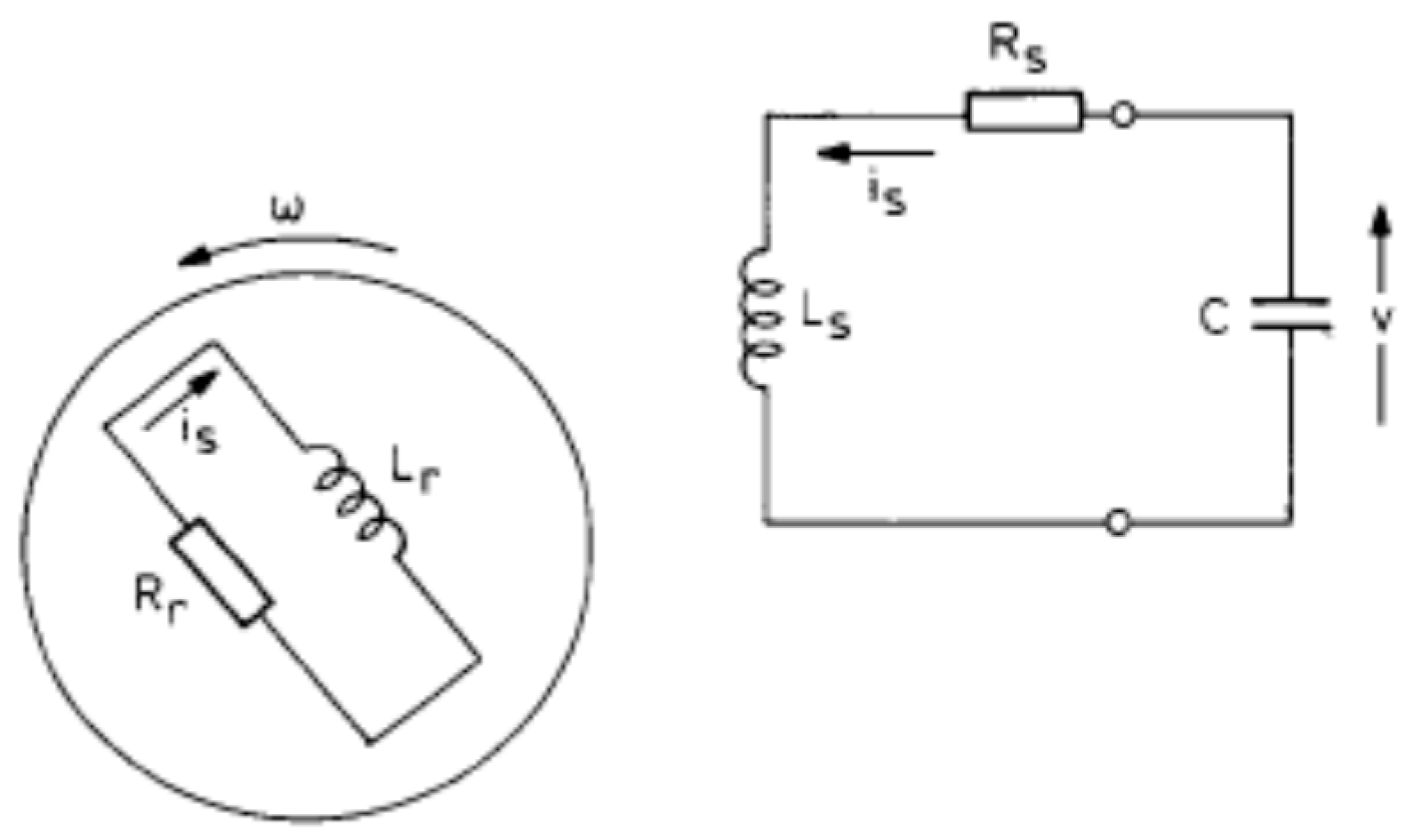
5. Computer Simulation of a Single-Phase Rotor, Single-Phase IG
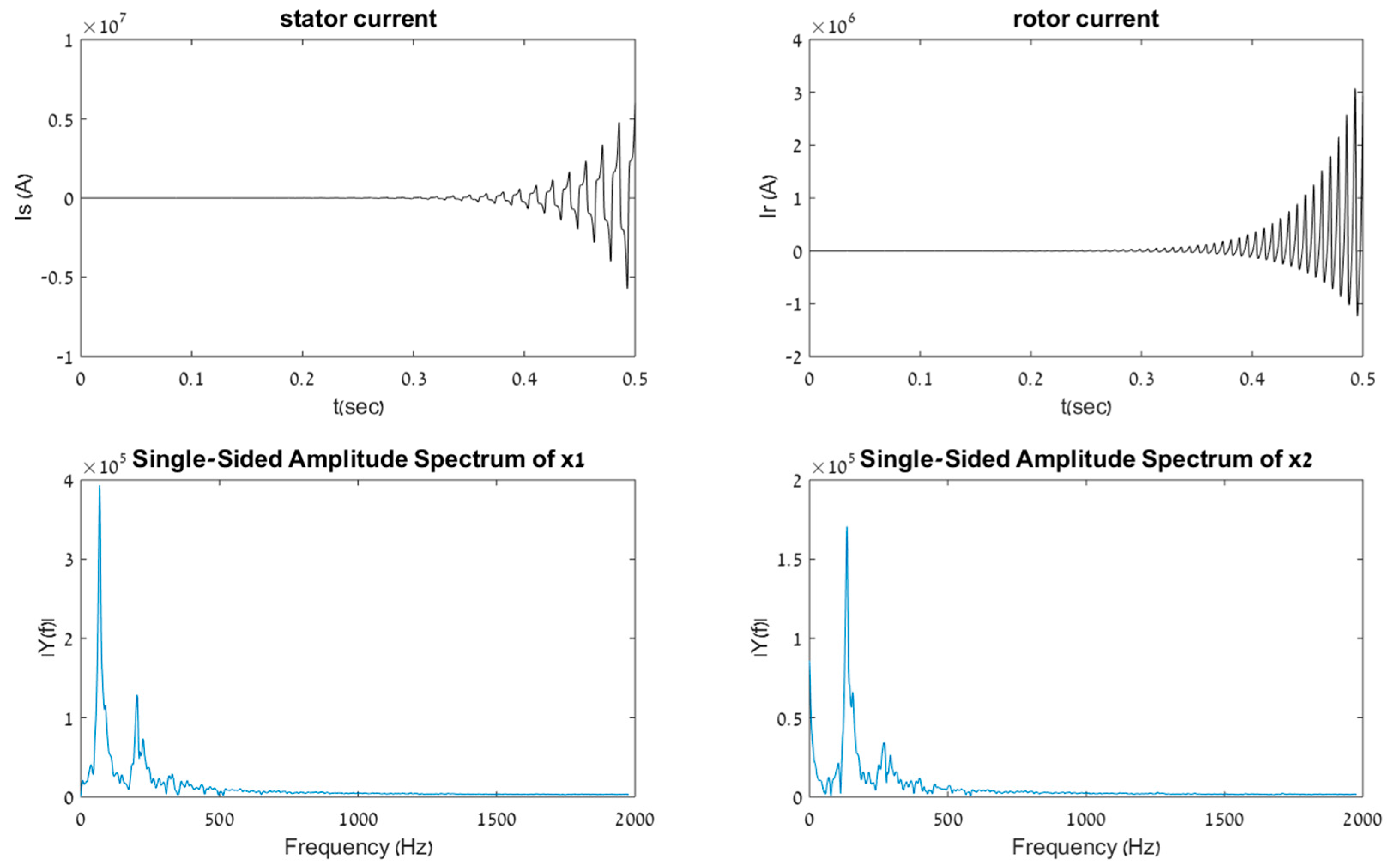
It remains to be shown that the current in the rotor has a frequency that is twice the frequency of the stator. Since this is an asymmetrical machine and therefore reacts not unlike a Variable Reluctance Machine (VRM)—and unless —the IG is not stable.
To prove this, a computer simulation of the machine was constructed using MATLAB based on Equations (1)–(3), which were solved using ode45. The resulting wave form was also pumped through FFT (Fast Fourier Transform) to obtain the frequency of the rotor. As this is a numerical simulation of the system of differential equations, it is devoid of approximations, enabling the validation of earlier approximations through deduction.
In this computer simulation, the core saturation was not taken into account. Therefore, the IG is stable when the simulation is exploding to infinity. This is valid since, as the stator currents grow, eventually the core is saturated and this makes them stabilize [
7].
The simulation parameters, simulating a system with some losses, are identical to the machine parameters outlined previously [
1]: a TERCO 1.5 kW Model MV-121 Slip Rings Induction Machine (Terco, Stockholm, Kungens Kurva industrial park, Sweden),
Ls = 0.22
Lr = 2.36·Ls~0.52 H
Rr = 3.9
Rs = 5.4
ωr = 420
M = 1.38·Ls~0.3 H
c = 4.1 × 10−5
As expected, the result with L
s = 0.22, indicates that a stable IG would be obtained. It should be clear in this context that the magnetic saturation of the machine is not modeled here. A stable run of the machine has been previously conducted [
1]. A simulation without magnetic saturation yields
Figure 13:
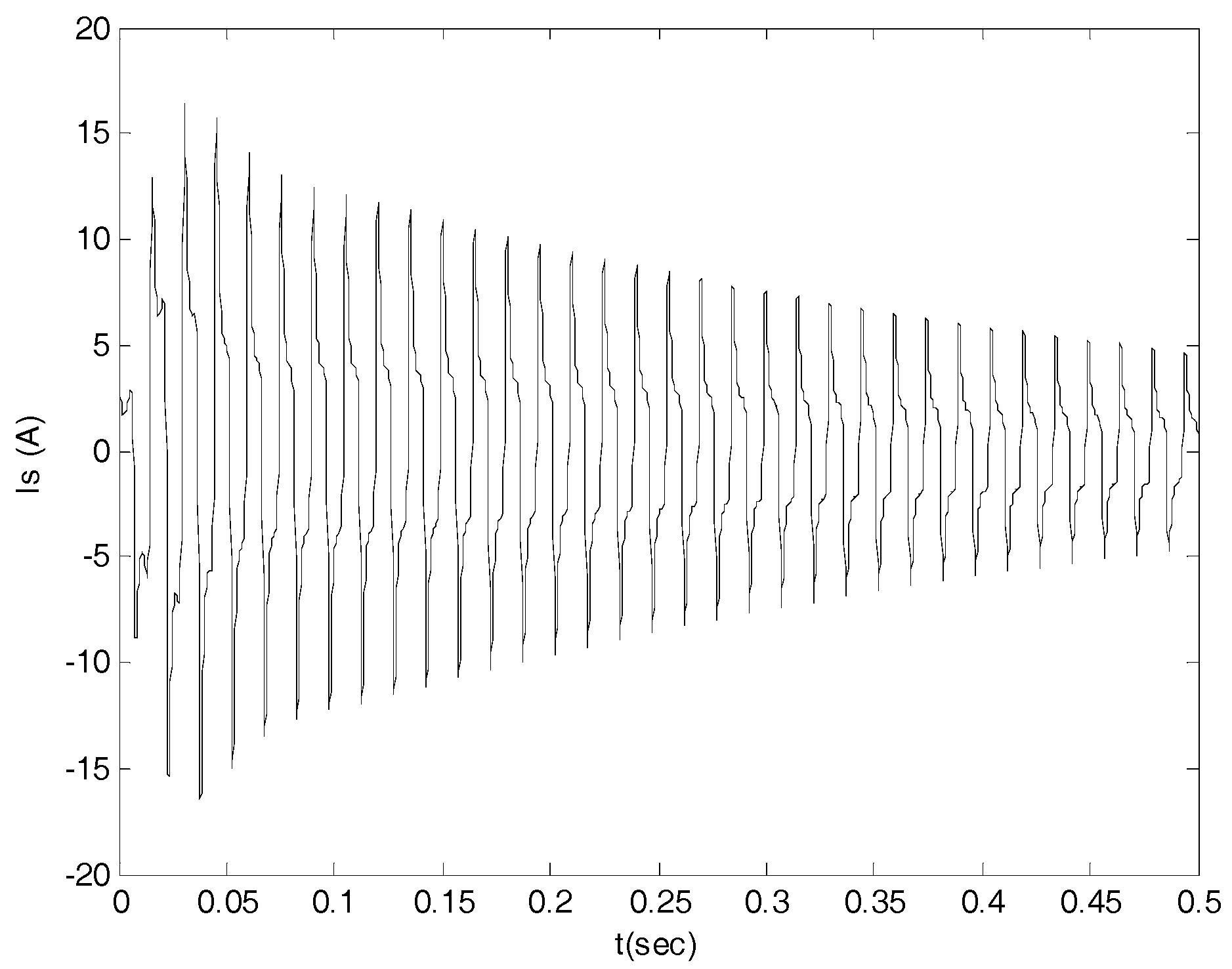
With L
s = 0.18 H the result is demonstrated in
Figure 14:
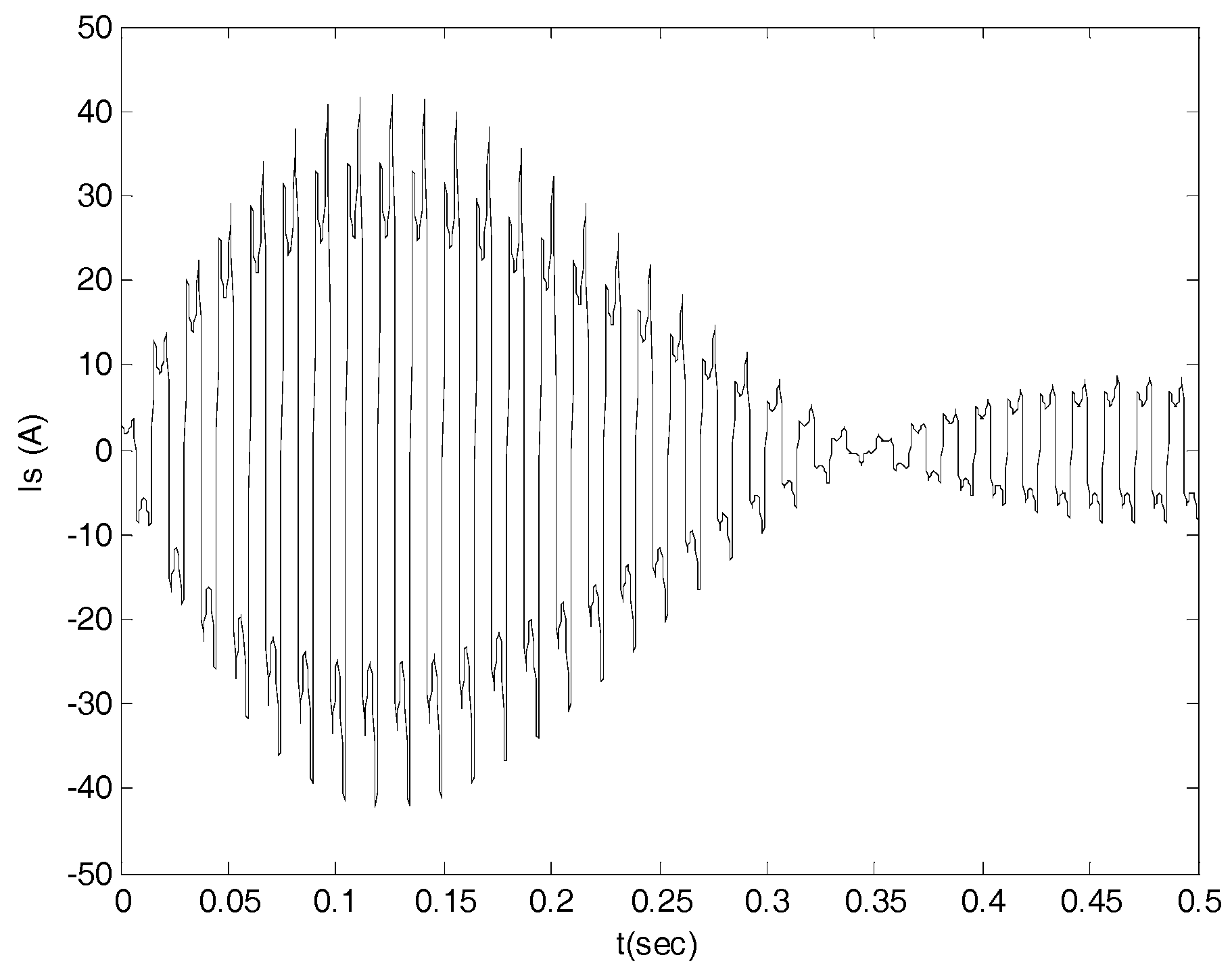
Where L
s = 0.2 H, as this is almost at the boundary, the result is more interesting and is shown in
Figure 15:
Therefore, it is demonstrated that for , the IG is not stable.
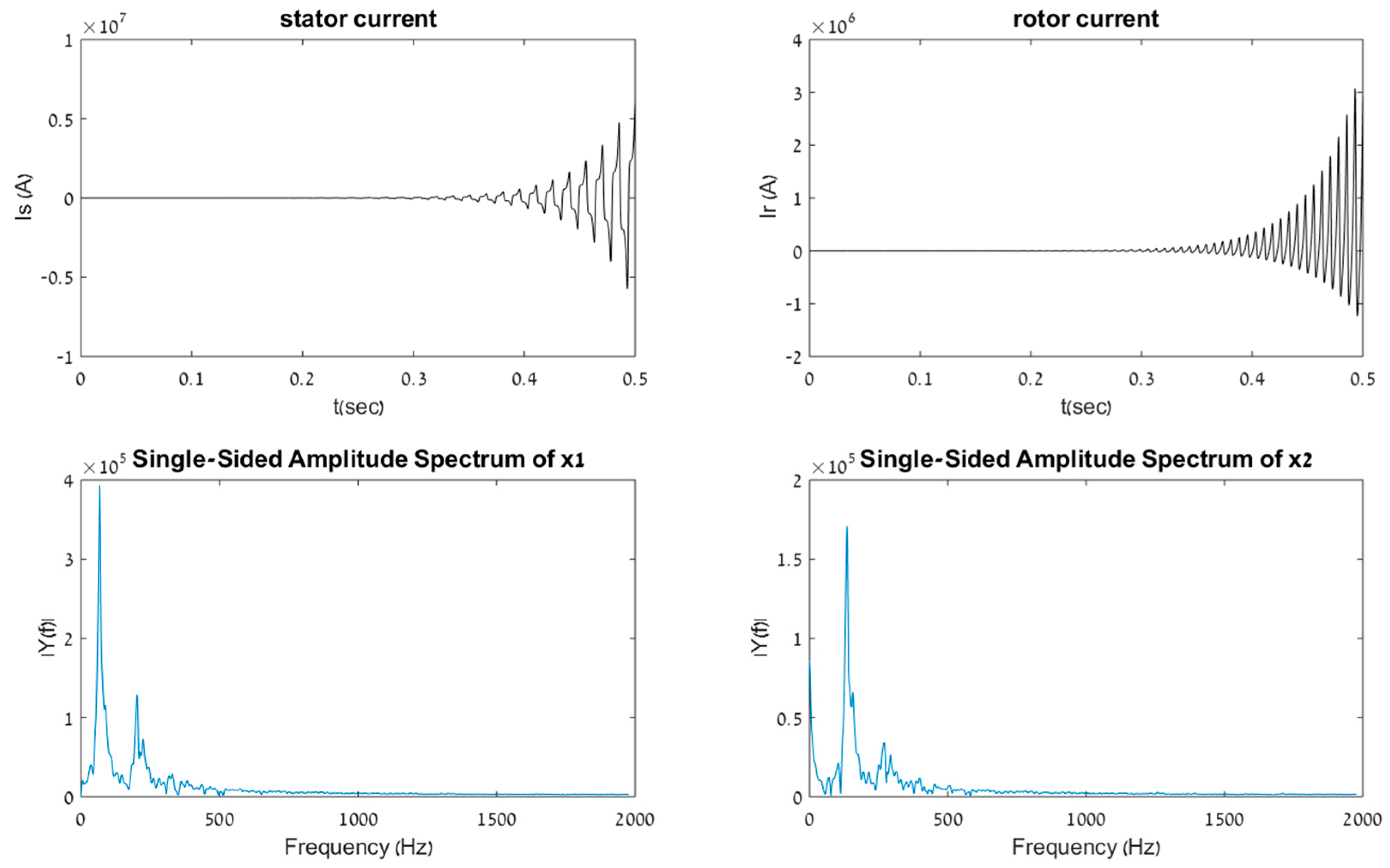
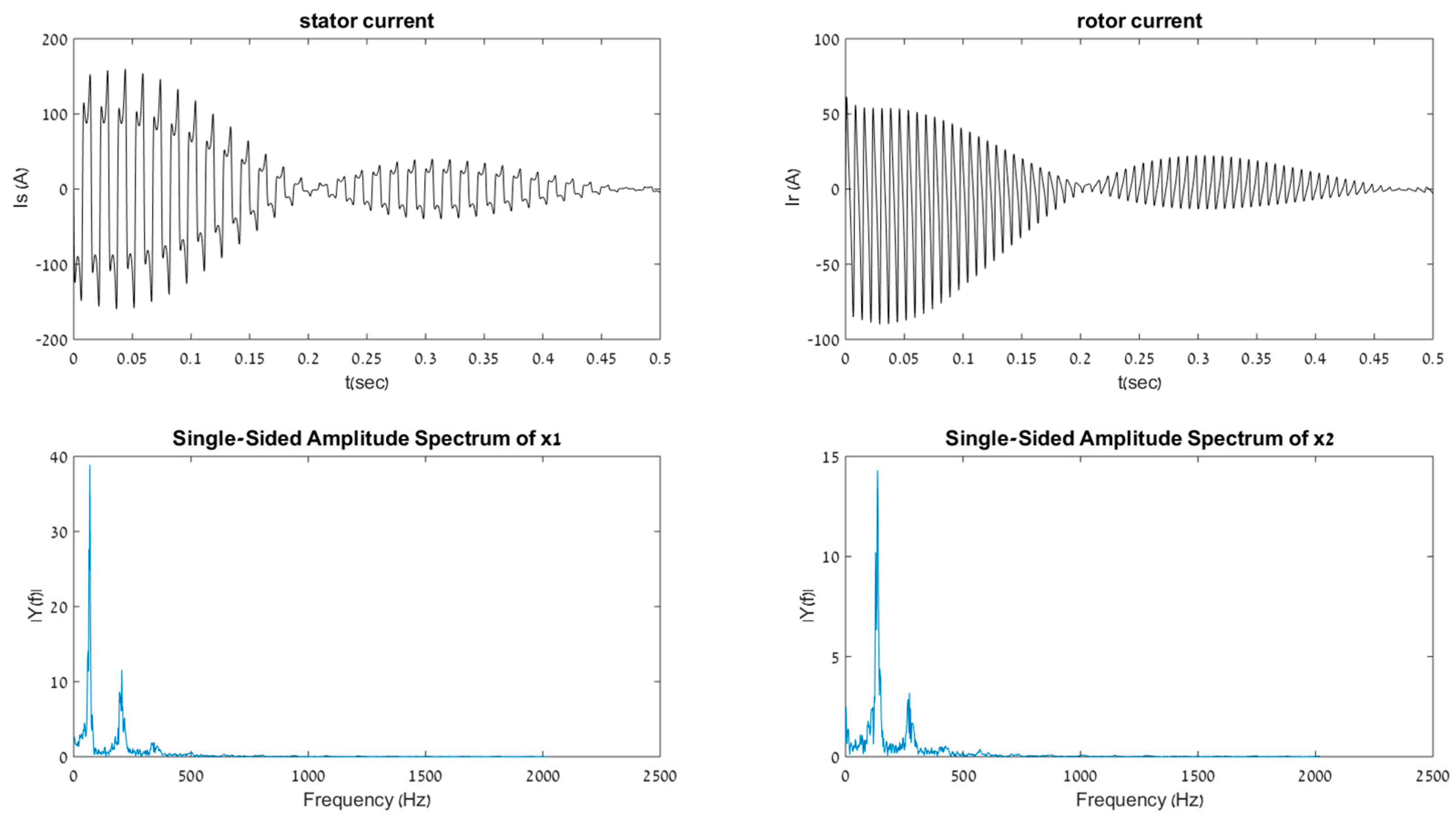
It remains to be seen that the rotor current frequency basic harmonics is at twice the stator current. This can be easily shown by plotting the rotor current as well, and pumping both through FFT. The results are given in
Figure 16:
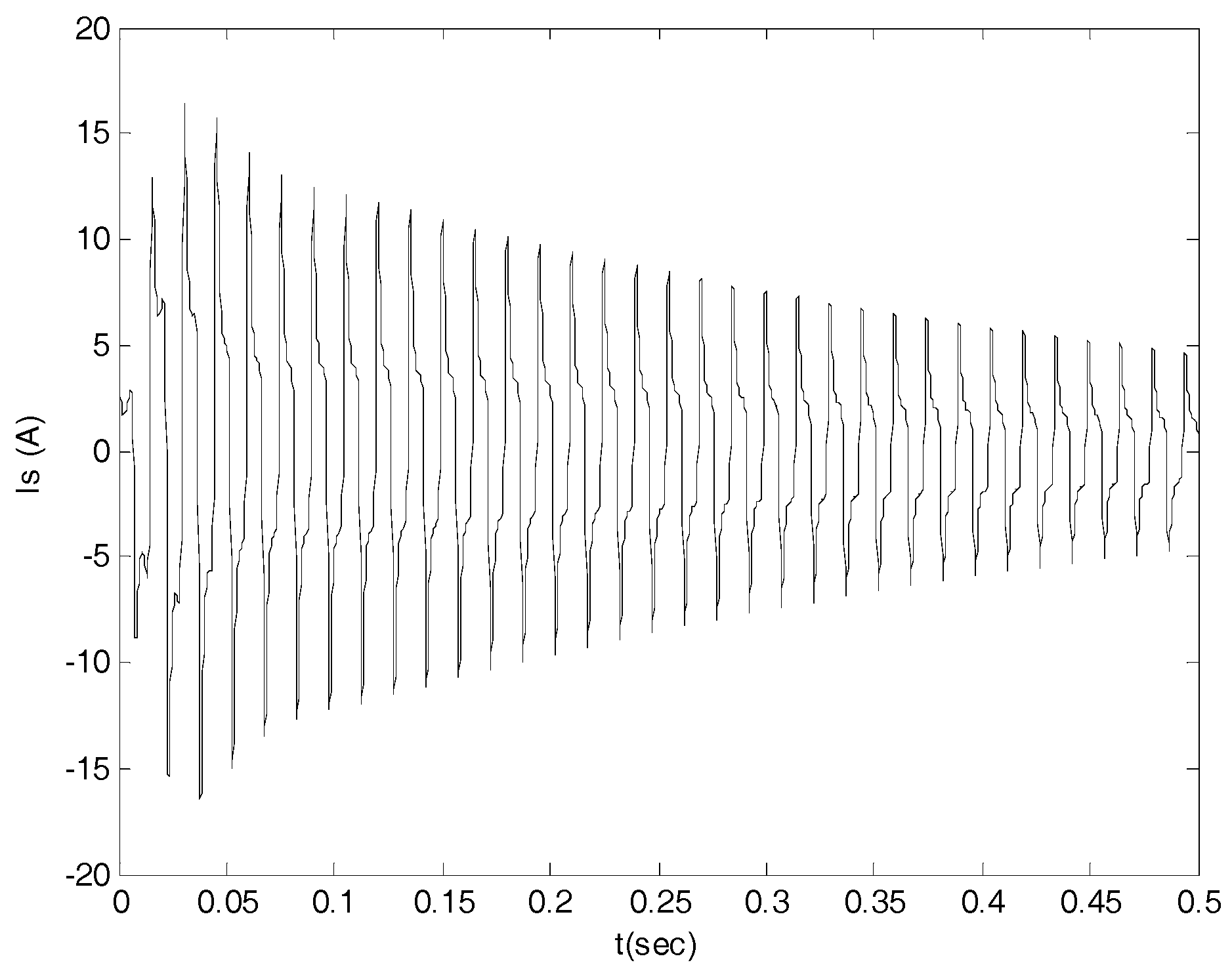
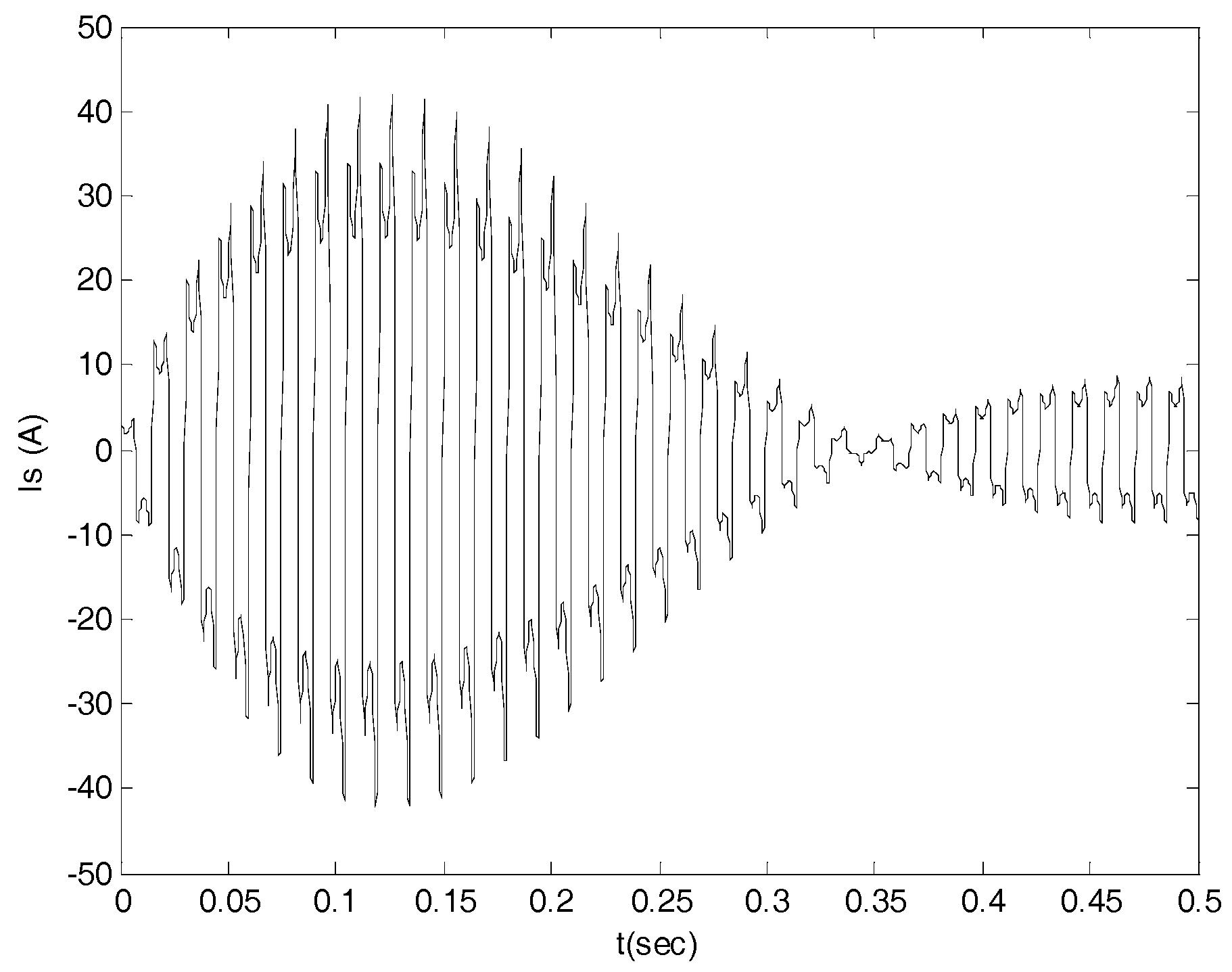
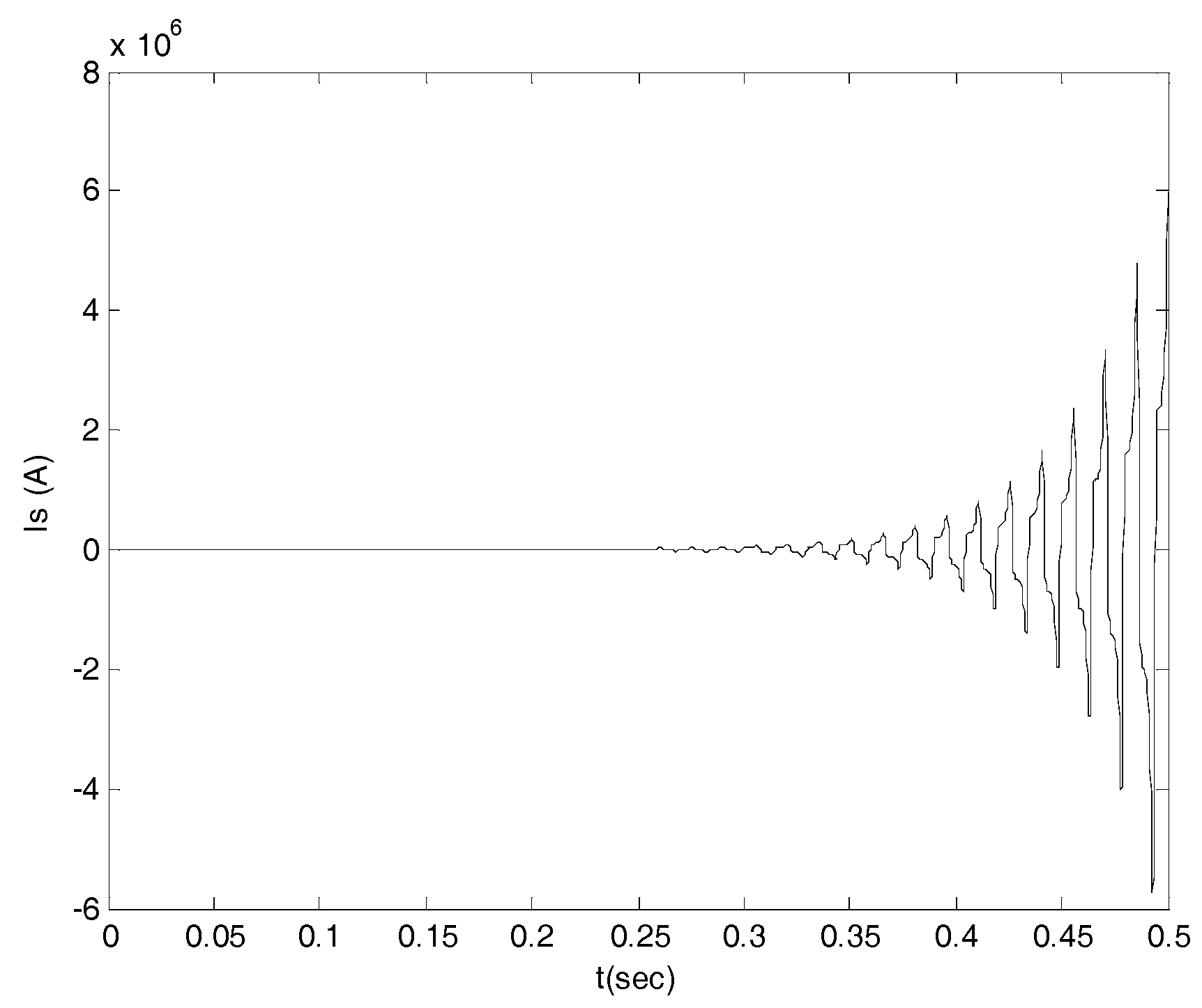
At the boundary,
exactly, the IG is marginally stable, as evidenced by the simulation when run for 0.5 s (
Figure 17).
At this point, the stability of the machine is highly dependent on the value of Rs. For example, increasing its value above Rs
max would yield an evanescent response.
Figure 18 shows the simulation response if
, which is slightly above Rs
max.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}