1. Introduction
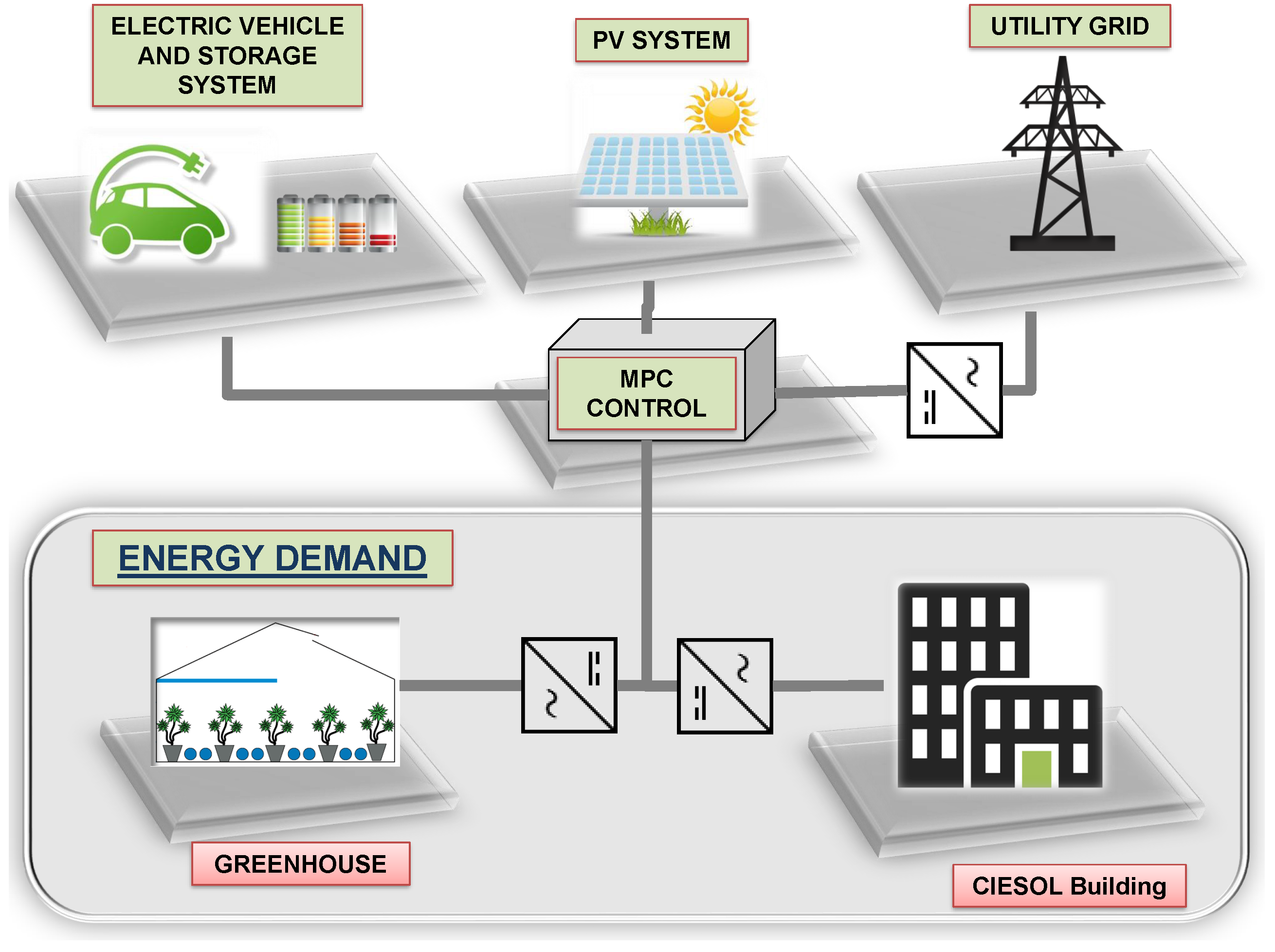
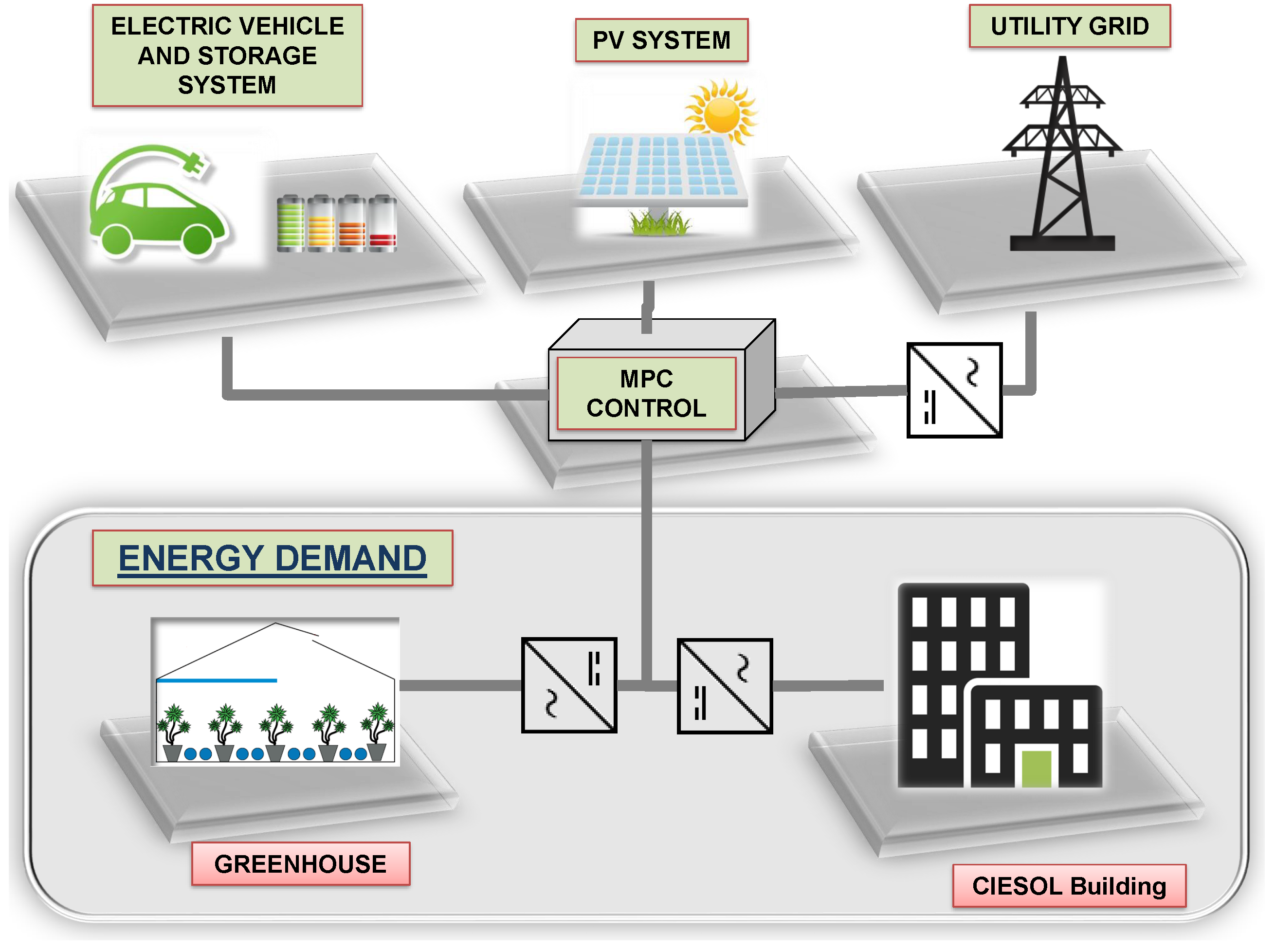
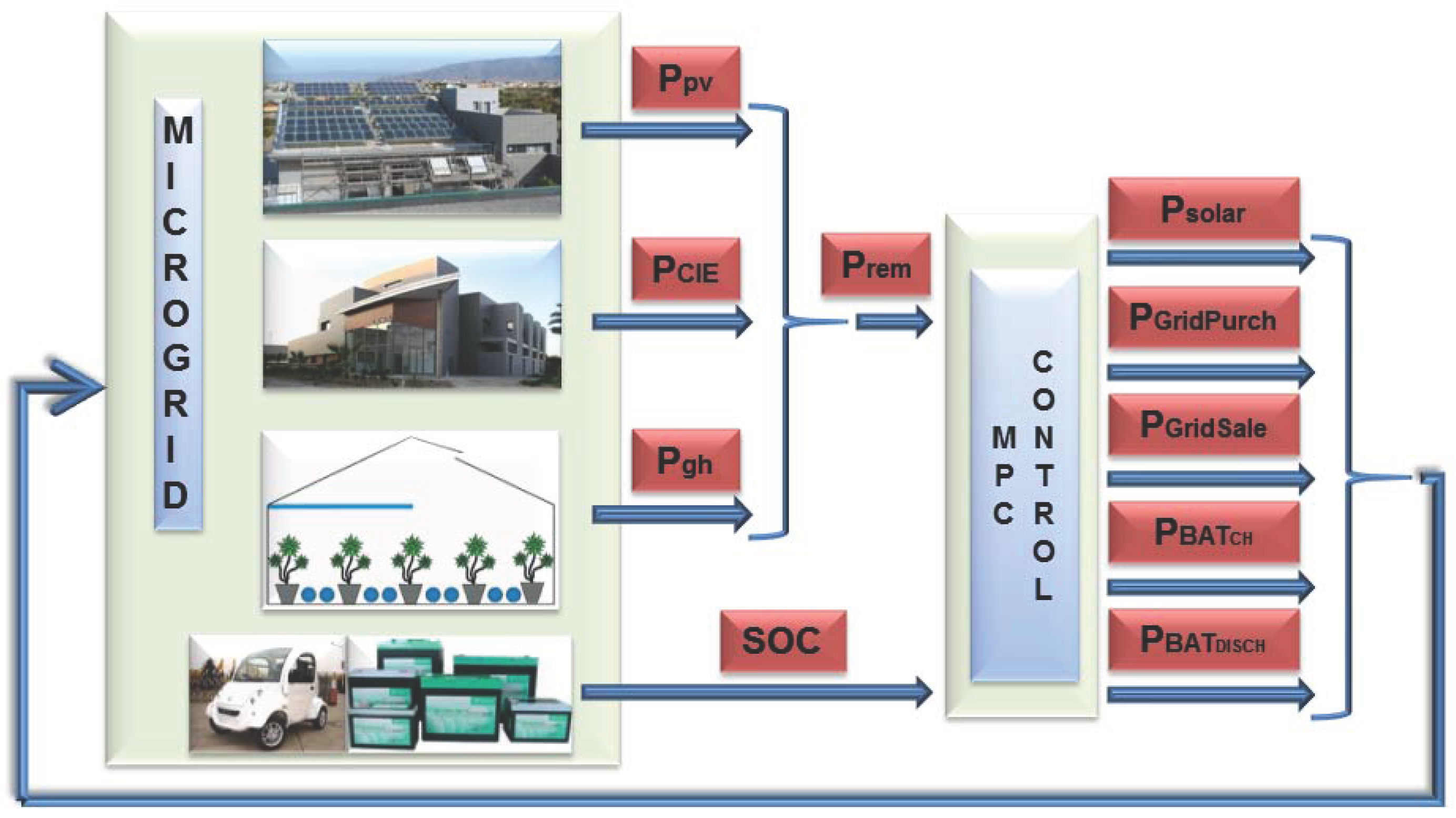
Microgrids (MG) are integrated energy systems composed of distributed energy resources and multiple electrical loads operating as an autonomous grid; these can be either parallel to or islanded from the existing power grid. A microgrid can be considered a small-scale version of the traditional power grid, its small scale leading to far fewer line losses and lower demand on the transmission infrastructure. All of these advantages are motivating an increased demand for microgrids in a variety of application areas such as campus environments, military operations, community/utility systems, as well as commercial and industrial markets [
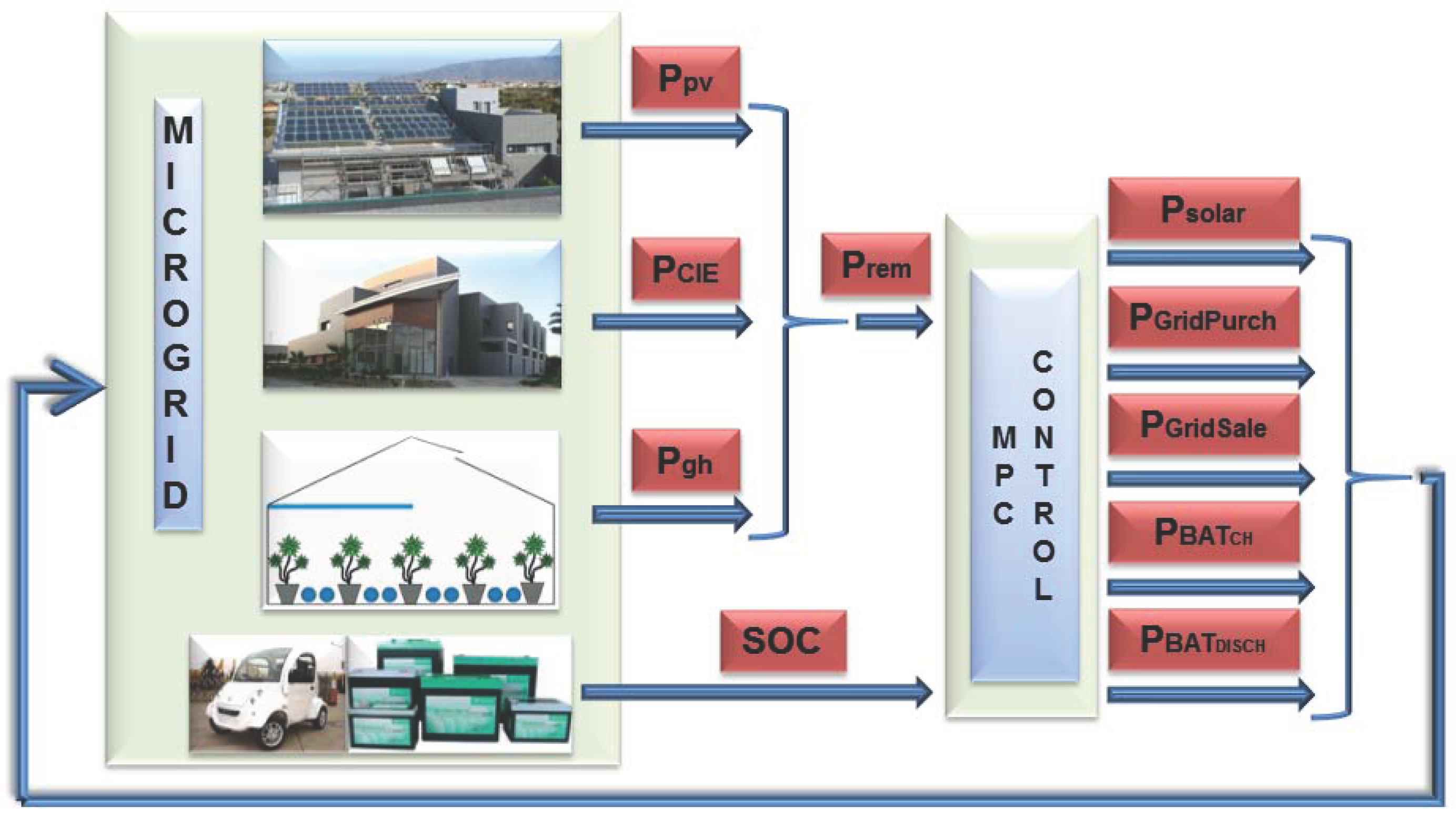
1]. An MG can provide optimal electricity distribution to consumers by implementing control strategies. Nowadays, the MG concept focuses primarily on the integration of distributed renewable energy sources, stationary storage batteries and methodologies for management and control, as is shown in [
2,
3,
4,
5,
6].
In the literature, there are several MG methods and applications. In [
7], the basic structure of an MG is presented, and a detailed discussion about MG control techniques is included. In [
8], the authors review the latest documents related to the use of hybrid energy storage systems (HESS), which facilitate the introduction of renewable energy sources (RES) to MGs. A centralized and decentralized control architecture for microgrids and their possible applicability to serve the particular needs in microgrids are discussed in [
9]. In [
10], a summary of the available approaches is presented (system configuration, unit size and control and energy management) along with those currently being investigated for the optimal design of RES hybrid systems. A decentralized energy management system based on multi-agent systems theory employing fuzzy cognitive maps for its implementation is proposed in [
11]. In [
12], a framework for microgrid energy management, where each agent is seeking an optimal goal-directed action planning under power consumption, production and price uncertainties, is proposed, and the optimal scheduling strategy is achieved by using a robust optimization approach. A multi-objective optimization in order to minimize the energy cost and greenhouse gas emissions in a hybrid system including photovoltaic (PV), wind, battery storage and a micro gas turbine is proposed and implemented in [
13]; furthermore, in [
14], an optimal energy management of a standalone microgrid under different operational modes is studied; the system is tested under two different operational policies where microgrid power generation sources work with and without the battery storage system. Moreover, in [
15], a control strategy for the integration of distributed storage systems in a photovoltaic and micro-current network is developed, which also includes varying loads. The proposed control allows the maximum use of photovoltaic energy under different MG operating conditions and provides a smooth transfer between network connection and isolation. In [
16], a strategy based on model predictive control (MPC) is presented, where the optimization problem has been formulated as a mixed integer linear problem (MILP), the control algorithm for which has been validated in an MG located at the Center for Renewable Energy Sources and Saving, in Pikermi-Athens, Greece. On the other hand, in [
17], an MPC algorithm in which the optimization problem has been formulated as a mixed-integer quadratic optimization (MIQP) has been applied to a microgrid located at the University of Seville, Spain. In [
18], the authors compared the MPC techniques and the hysteresis band (HB) method in energy dispatch within a microgrid. The main difference between MPC and HB is that MPC guarantees optimality, while HB does not. The authors conclude that there is a dramatic reduction in the cost of operation using MPC techniques.
MG operating requirements are usually satisfied by a hierarchical control structure [
19], where several authors have shared the idea of considering three levels associated with different time scales [
20,
21]. The primary level operates at a fast time scale, maintaining voltage and frequency stability during changes in the generation or load, or after switching to the island mode. The secondary level is responsible for ensuring that the voltage and frequency deviations are adjusted to zero after a load or generation change is produced within the microgrid. This tertiary control is used to control the power flow between the microgrid and the main grid and for optimal operation over large time scales [
22].
The MG’s control loop performance can be improved when disturbance information is available. This can be done using a feedforward controller based on disturbance estimations, mainly of the demand and the available renewable energy. There are many methods for estimating energy demand, and these can be characterized by the prediction horizon length and the selected methodology. The prediction horizon may vary depending on the application and can be considered as a short-term forecast for predictions up to 60 min [
23,
24] or a long-term forecast for hourly, daily and monthly prediction values [
25,
26]. On the other hand, disturbances are usually represented as time-series structures mainly due to their stochastic behavior. Time-series models are one of the ways to estimate future energy demand values. These models are obtained using past data and are used to estimate future behavior along a prediction horizon. Time series models are based on the assumption that modeled data are autocorrelated and characterized by trends and seasonal variations. Thus, well-known autocorrelated models like autoregressive moving average (ARMA), autoregressive integrated moving average (ARIMA), autoregressive moving average with exogenous inputs (ARMAX) and autoregressive integrated moving average with exogenous inputs (ARIMAX) [
27] can be used. Artificial neural networks (ANN) are a different approach for disturbance estimation when the design is training-based and no statistical conditions are assumed for the source data. Neural networks (NN) are widely accepted as a technology for predicting time series, offering an alternative way to solve complex problems [
28]. Neural networks and ARIMA models are often compared in terms of forecasting capacity. As a tool for nonlinear system identification, the nonlinear autoregressive with exogenous inputs (NARX) network has been successfully applied to a number of real-world input/output modeling problems, such as biomedical time series modeling [
29], communication network traffic prediction [
30] and energy demand [
31].
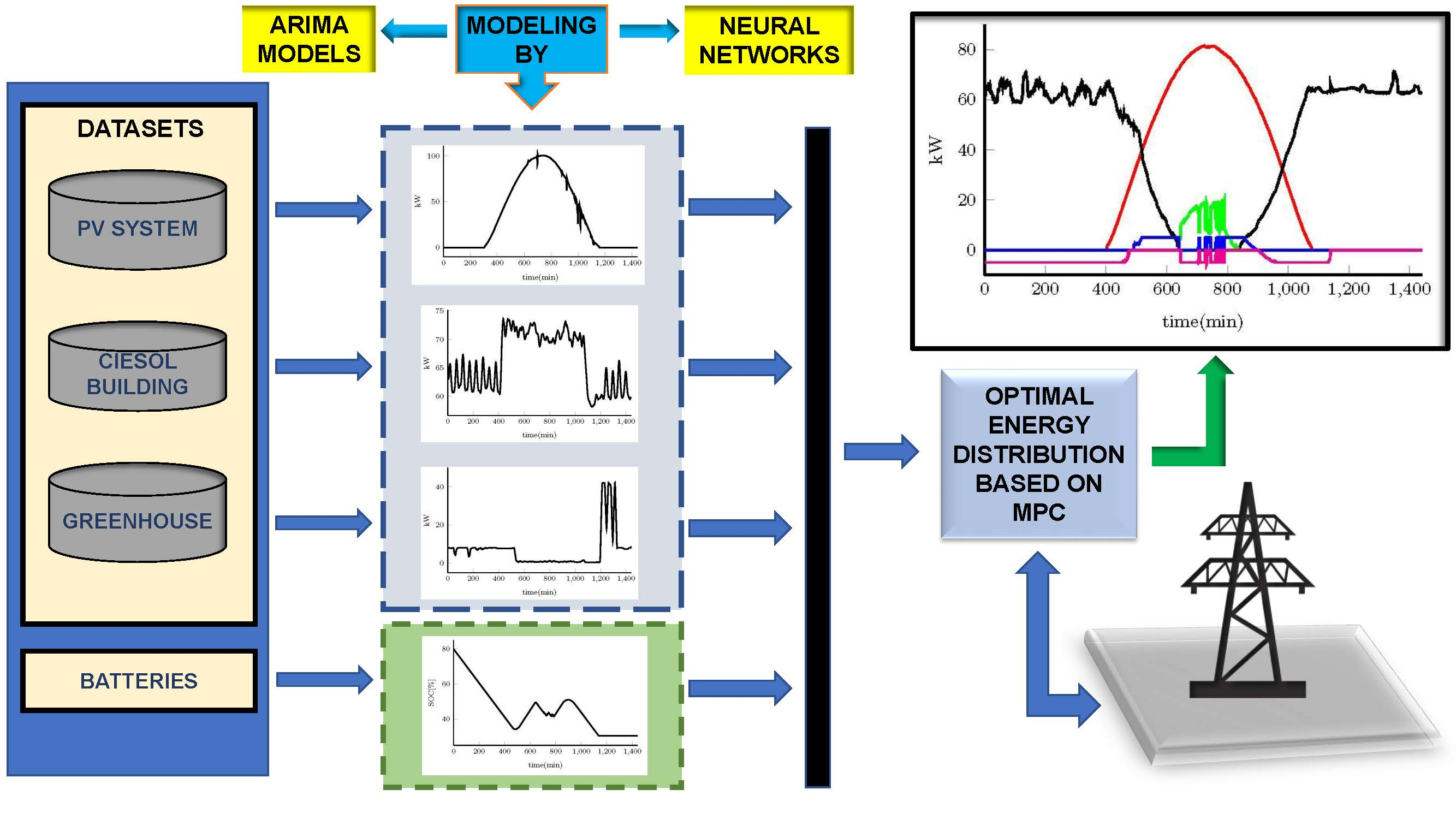
This paper studies the effect of using different prediction strategies in a closed-loop control framework for energy management in a real case study. Methods based on time series and neural network models are used for the photovoltaic panel energy production and the energy demand of the load systems (building and greenhouse). The models are identified using real data collected at a sampling time of 1 min during the years 2014 and 2015. The microgrid optimal energy management problem is formulated including binary variables in the constraints and solved as mixed integer quadratic programming (MIQP). In this way, the prediction models are utilized to provide a feedforward framework, and the usability of the predictions over different prediction horizons is discussed. It is important to emphasize that feedforward action effectiveness is directly connected to the predictions’ quality. Significant improvement is obtained for closed-loop system behavior compared to the case of constant future predictions. Moreover, controller performance is compared to an ideal case with perfect future predictions, and a discussion is carried out to evaluate the prediction methods.
The rest of the paper is organized as follows: in
Section 2, the microgrid subsystems, the methods and the performance criteria used to model energy demand and electrical energy production are briefly shown, and the energy hub’s methodology is also presented; in
Section 3, the results and discussions are shown, and finally, in
Section 4, the conclusions are outlined.
4. Simulation Results and Discussion
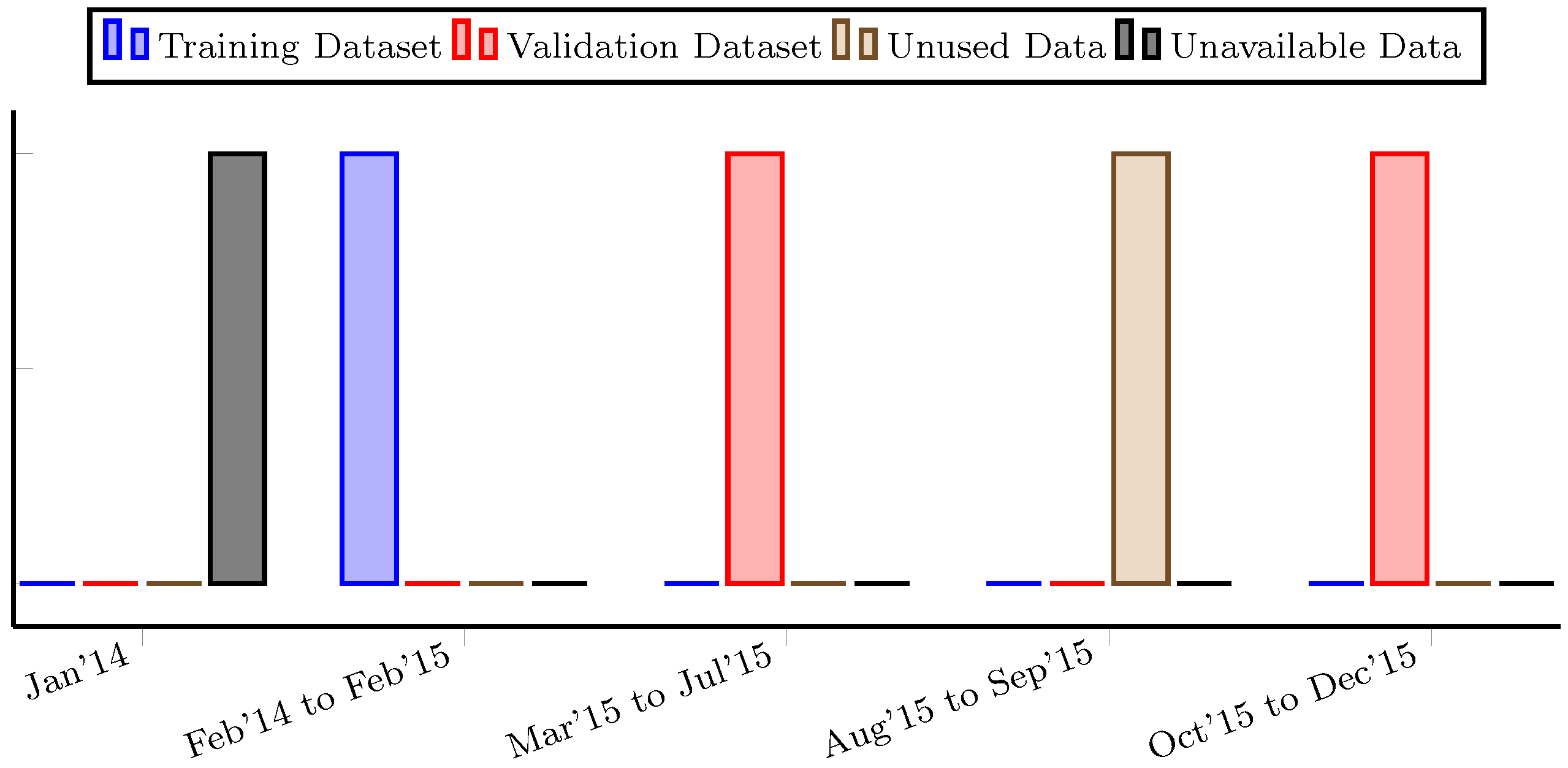
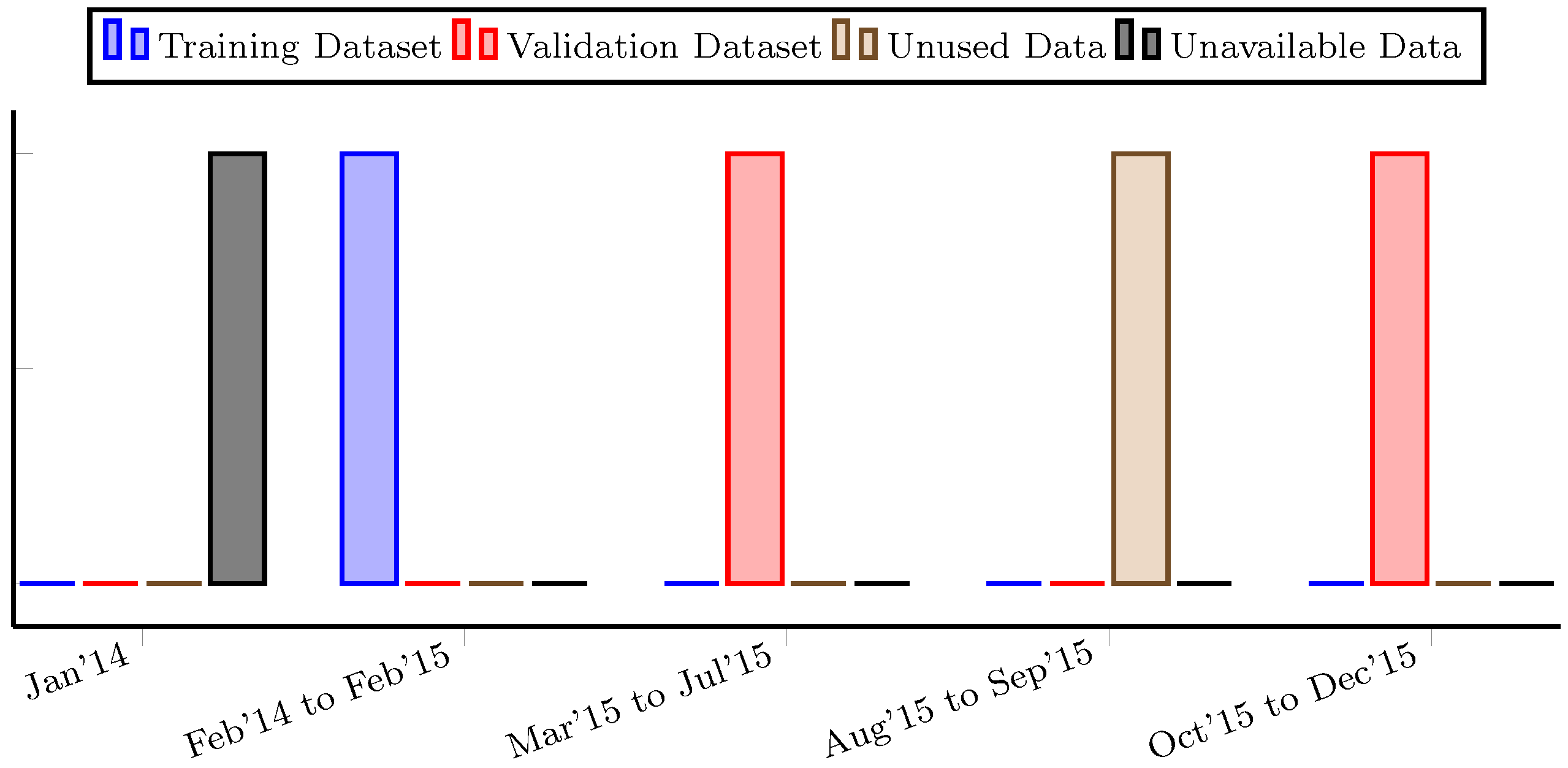
This section presents the results obtained from applying the control and prediction methods. As already mentioned, the analysis mainly focuses on load prediction, which has been executed with forecasting steps given minute by minute. The energy demand and production were previously filtered using the Savitzky–Golay filter [
42] in order to preserve initial distribution characteristics such as the relative maximum and minimum, as well as the width of the peaks. Data from 2014 have been used to identify the models and during different days of the year 2015 have been used for validation (see
Figure 7). Different scenarios are presented using the proposed controller in order to realize optimal energy distribution and to observe the contribution made by the prediction models on two different significant days.
4.1. CIESOL Building and PV System
Two models for each system were proposed. Firstly, we compared several combinations of the autoregressive moving average (ARMA) models using the final prediction error (FPE) [
43]; these models were based on historical energy demand and energy production data. The data used to identify these models were chosen from data collected over the year 2014. The ARMA model for a single-output time series is given by the following equation:
where
is the system output and
is the model error. The ARMA structure reduces to the autoregressive (AR) structure for
as is mentioned in [
43].
The discrete-time polynomials obtained for the CIESOL building energy demand (
A1) and for the energy production of the PV system (
A2) are detailed in
Appendix A.
Additionally, for the same periods and minimizing the MSE, we evaluated several combinations of the NAR neural network multilayer perceptron using the Levenberg–Marquardt algorithm. These combinations included networks with different numbers of hidden layers, different numbers of units in each layer and different types of transfer functions. The chosen configuration consisted of one hidden layer with 11 and 10 neurons for CIESOL and the PV system, respectively, and a hyperbolic tangent sigmoid transfer function within this layer, defined by the equation:
where
n is the weighted input of the hidden layer and
is the output of the hidden layer. For the output layer, a log-sigmoid transfer function was selected (
36), and eight and six neurons for CIESOL and the PV system were used, respectively.
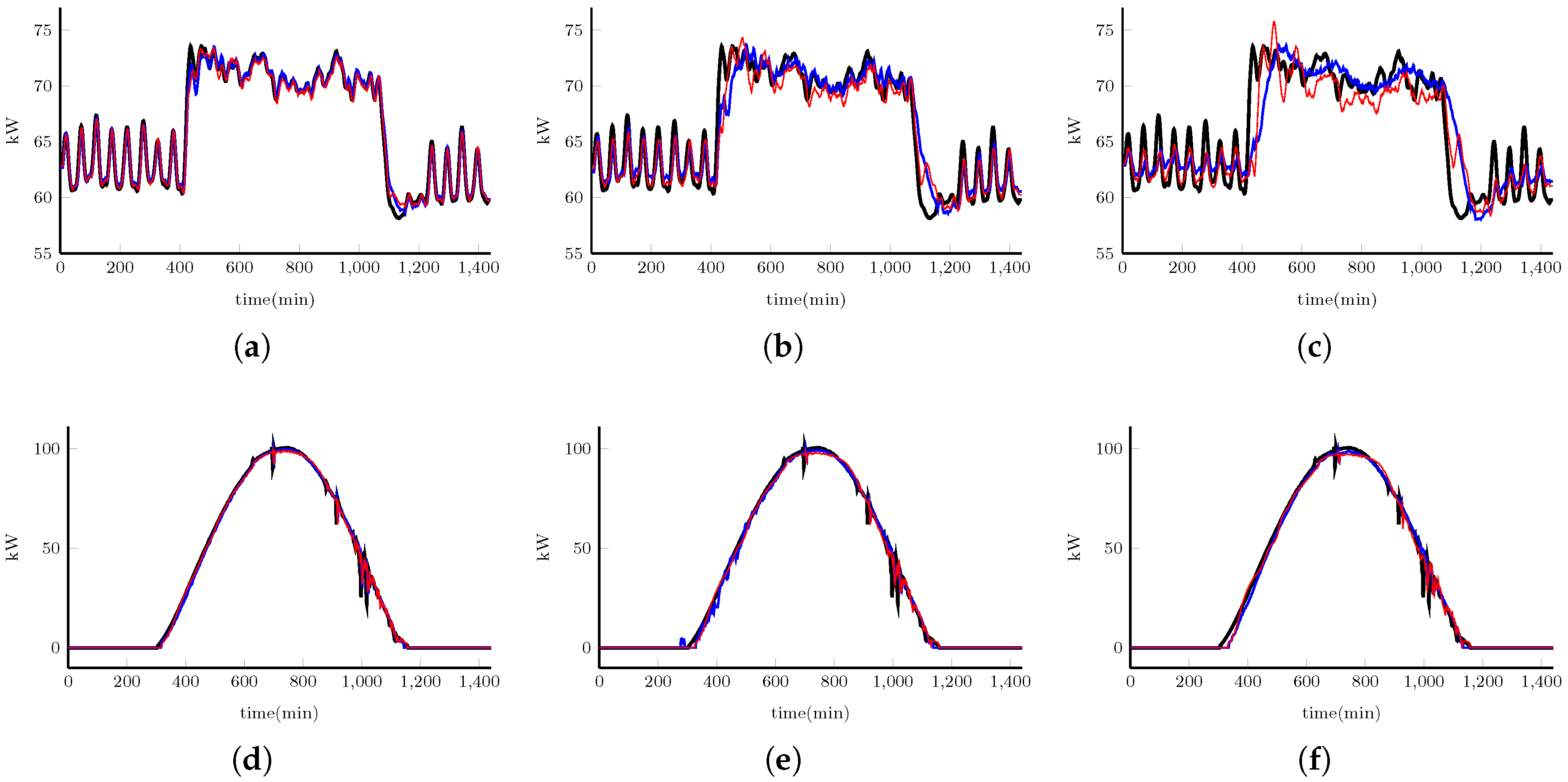
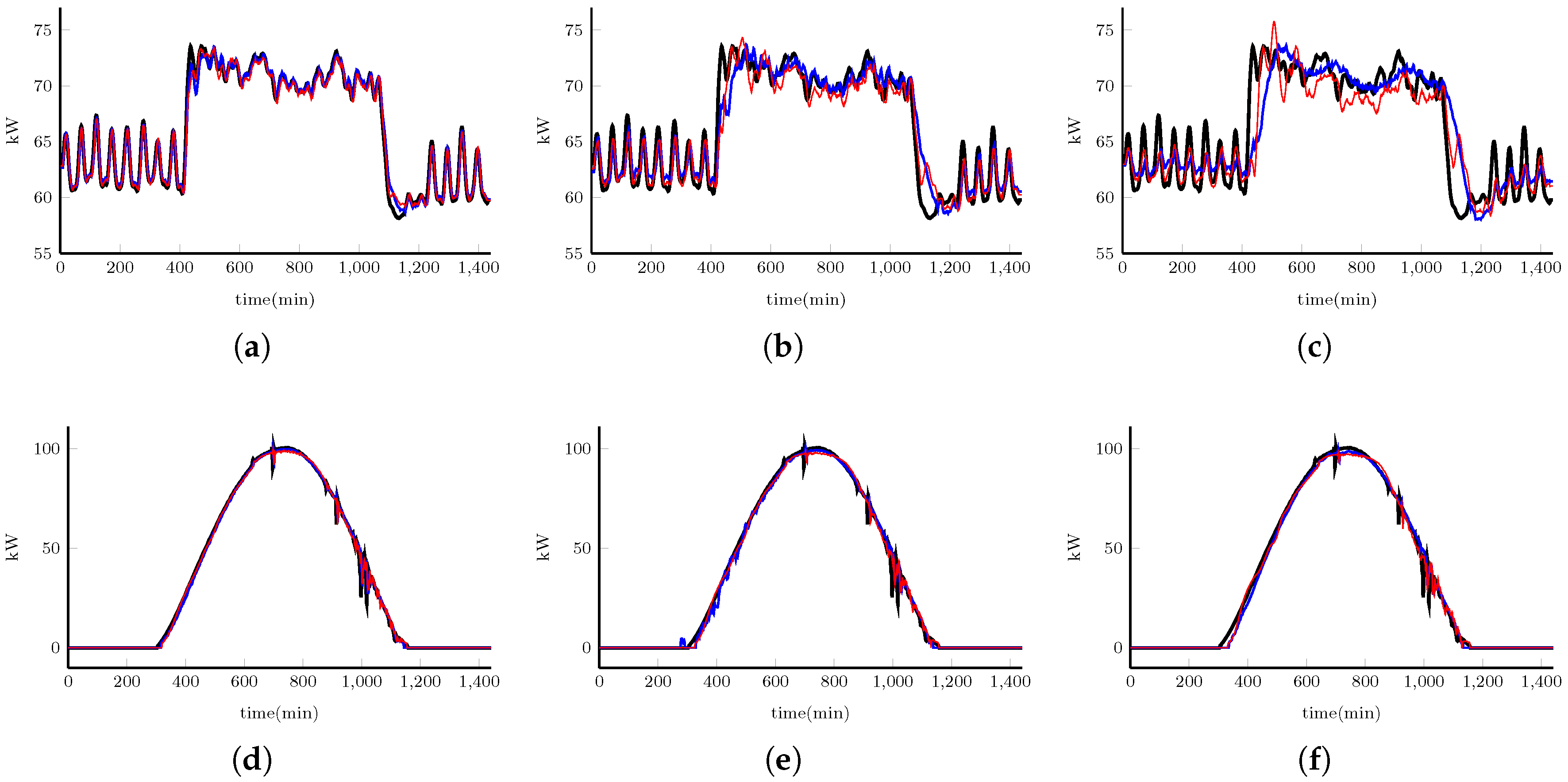
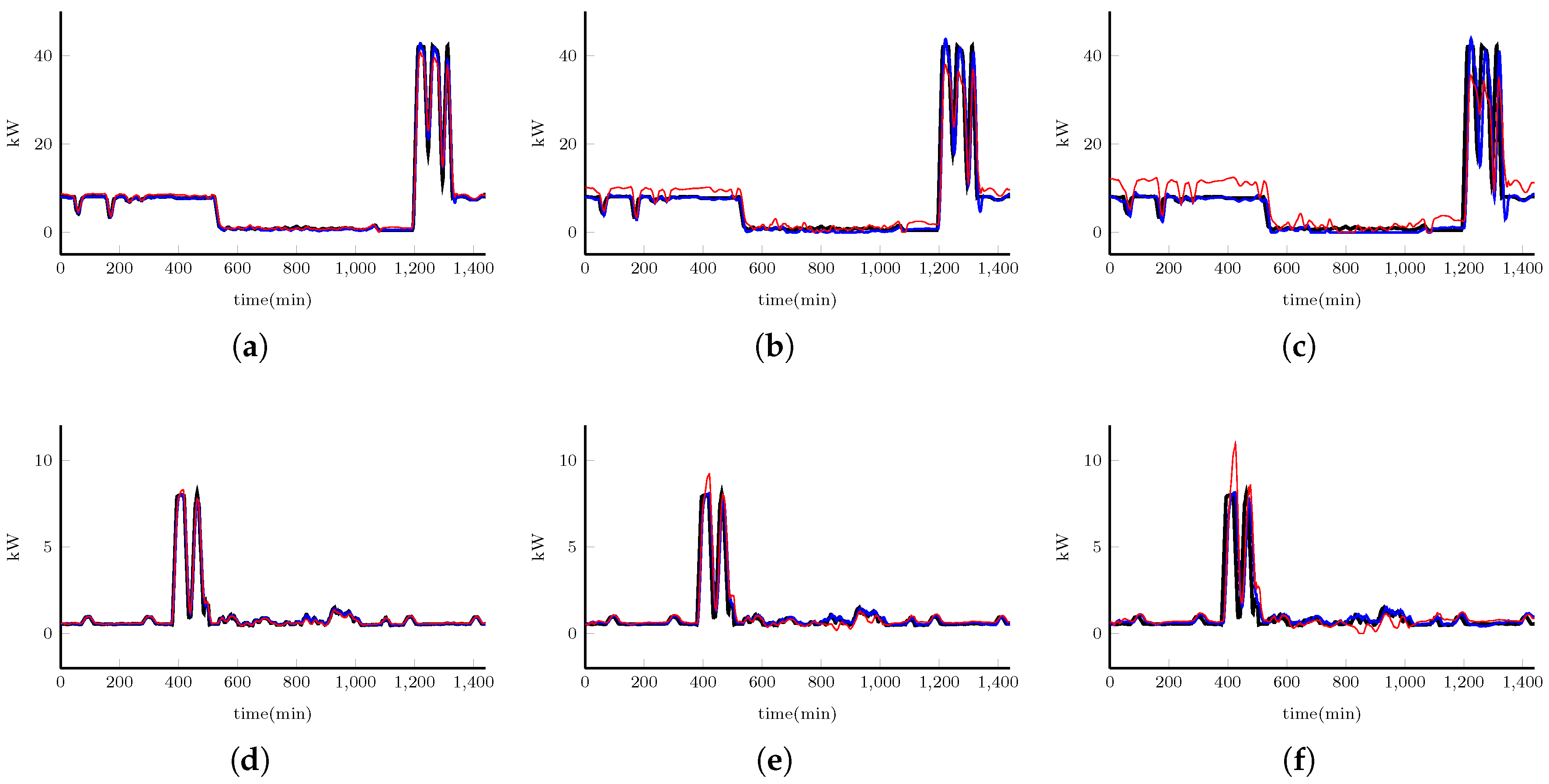
In order to evaluate prediction accuracy, these models were evaluated for predictions with 5, 10 and 15 horizon samples.
Figure 8 and
Table 4 show the obtained results.
For the CIESOL building, one can observe that both models (ARMA and NN) produced good performance; however, it can also be observed that the NN model better approximated the peak demand and showed better results for all sample horizons. One can see that the neural networks method is able to capture sudden changes, whereas the ARMA method only follows the trend. The lower MSE, RMSE and MAPE values of the NN model for all horizons show that it is better than the ARMA model; furthermore, the is the square of the sample correlation coefficient between the real samples, and their predicted values-values close to one are desired. The resulting values for this analysis are satisfactory, with the NN model presenting higher values than the ARMA model. However, for a 15-sample prediction horizon, one can observe that a substantial change exists for that of the 10-sample prediction horizon in both models; that is, both models are able to follow the trend, but the energy demand peaks have not been captured.
Conversely, for the photovoltaic system, the best results derived from the neural network model for all sample horizons. Moreover, one can see that the two models produce a small predicted signal delay when clouds are passing. Nevertheless, the neural network model provides the best performance according to
Table 4 with smaller differences compared to the ARMA model, in which the absolute percentage error measurement shows that the best forecasting accuracy is provided by the NN model (this does not exceed
for the 15-sample horizon). One can also observe that, when there is a substantial change in radiation, both 15-sample prediction horizon models take longer to follow the process dynamics. In contrast, there is no great change in the 10-sample prediction horizon.
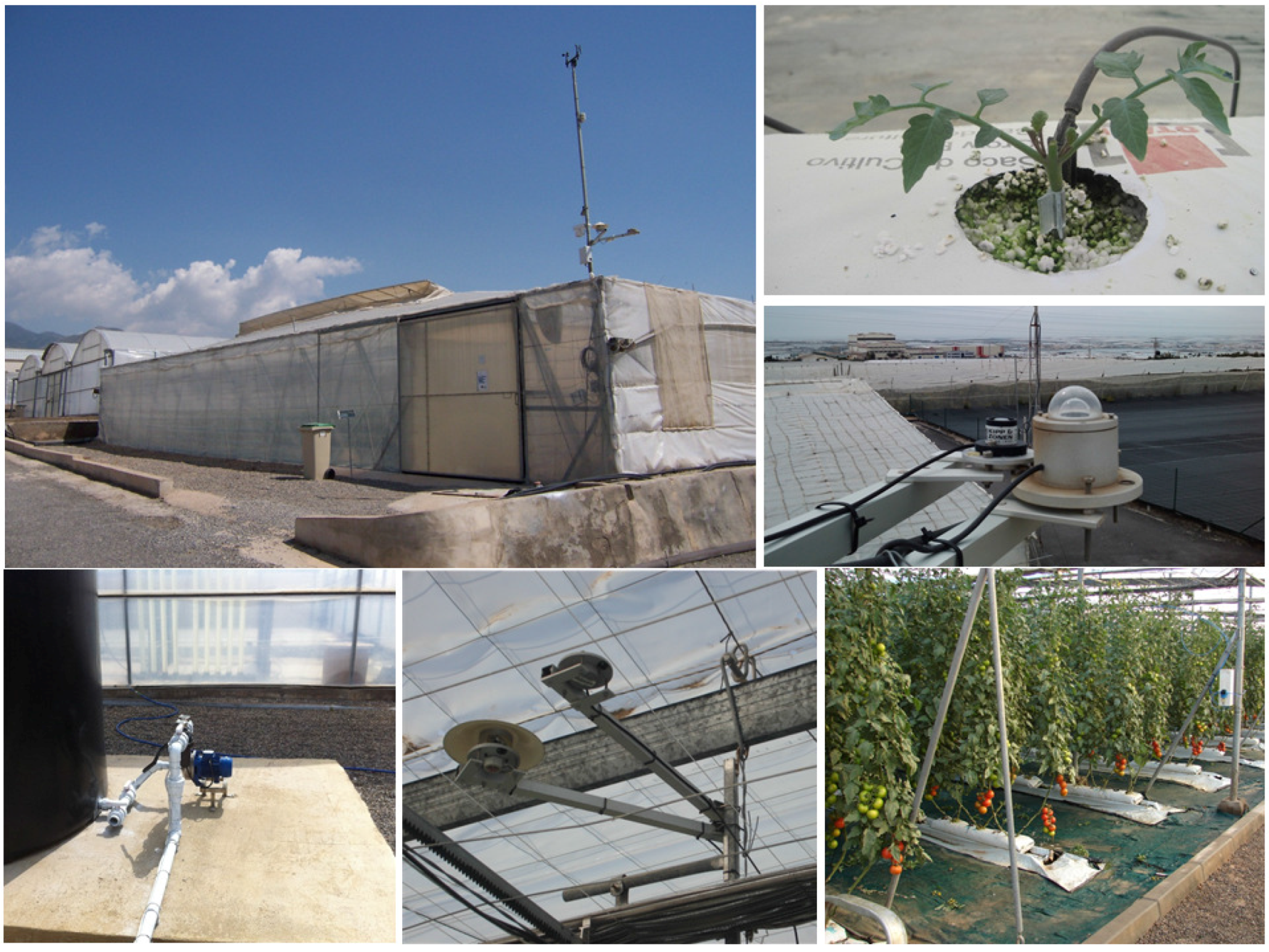
4.2. The Greenhouse
The energy demand has been considered as a MISO (multi-input single-output) system, where inside temperature,
, outside temperature,
, inside relative humidity,
, global radiation,
, blower,
, pump heating,
, zenithal ventilation,
, and lateral ventilation,
, were the input variables, and energy demand,
, was the output variable. All greenhouse variables were measured with a sampling period of 1 min. In order to calculate future predictions, the future inputs were considered as known; however, these inputs can be estimated by other prediction models. A model based on Bayesian networks was presented in [
34] considering these variables, where the energy demand was classified into four classes. One of the main problems when considering energy demand classes is that information is lost about the real demand values.
In this paper, the real value of the energy demanded is represented; meaning energy information is not lost when defining it within classes. It has been observed that energy demand behavior in the greenhouse was that of low energy demand during the spring-summer and high energy demand during the autumn-winter. This is because during the spring-summer, there is no crop, and the cultivation period occurs during the autumn-winter, when a controlled temperature inside the greenhouse has to be maintained using different heating systems due to the low overnight temperatures. Accordingly, four models were proposed, an autoregressive with external input (ARX) model and one based on neural networks for the autumn-winter season, as well as an ARX model and an NN model for the spring-summer season. To identify the spring-summer models, we considered data from 22 February 2014–21 September 2014. For the autumn-winter season, data from 22 September 2014–21 February 2015 were chosen.
Several ARX models were performed. An ARX model was observed as follows:
Using Akaike’s Information Criterion (AIC) [
44], better dynamic behavior adjustment was presented to the real system, where
and
for the autumn-winter model and
and
for the spring-summer model were used, respectively.
The discrete-time polynomials obtained for the autumn-winter season (
A3) and for the spring-summer season (
A4) are shown in
Appendix A.
On the other hand, to find the optimal network architecture, several combinations of NARX neural network multilayer perceptron were evaluated using the Levenberg–Marquardt algorithm minimizing the MSE. These combinations included networks with different numbers of hidden layers, different numbers of units in each layer and different types of transfer functions.
A configuration was chosen consisting of a hidden layer with 11 and 12 neurons for the autumn-winter season and spring-summer season, respectively, along with a hyperbolic tangent sigmoid transfer function in this layer, defined by (
35). For the output layer, a linear transfer function was selected with eight neurons for the autumn-winter season and eight neurons for the spring-summer season.
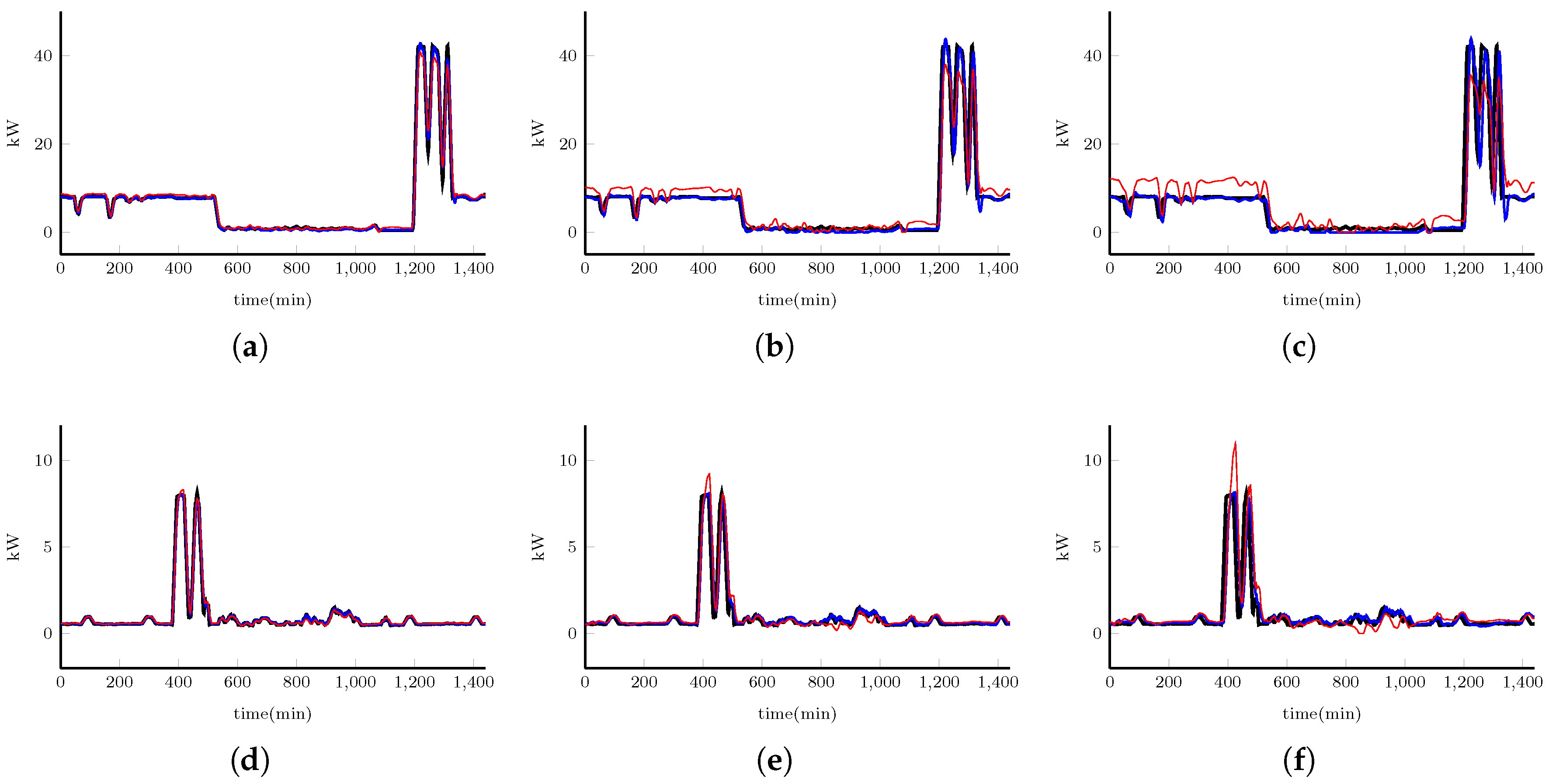
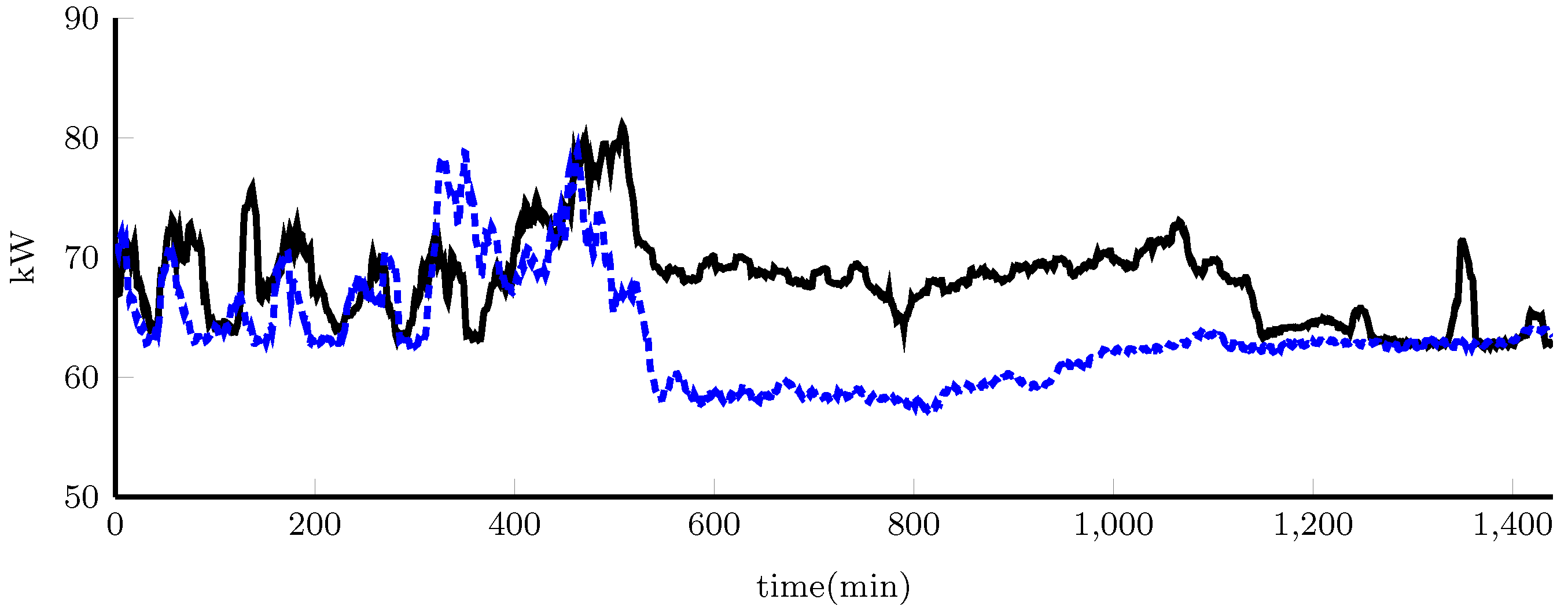
Figure 9 shows the one-day forecasting results during the autumn-winter and the spring-summer season of 2015 using a prediction horizon of 5, 10 and 15 samples. The results are summarized in
Table 5. The changes in energy demand during the autumn-winter season were more abrupt than in the spring-summer season, meaning the models obtained for the autumn-winter season had a greater prediction error compared to the spring-summer season models.
The resulting values of for this analysis are satisfactory for both models with a 5- and 10-sample prediction horizon; however, one can see that for a 15-sample prediction horizon, the coefficient is below 0.7 for the spring-summer season. For the autumn-winter season, the ARX model values are , and , compared to the NN model values of , and for the 5-, 10- and 15-sample prediction horizons, respectively. Furthermore, for the spring-summer season, the ARX model values are , and against the NN model values of , and for the 5-, 10- and 15-sample prediction horizons, respectively. Consequently, the ARX models give better results than the NN models for both seasons.
4.3. An Optimal Distribution Using the Proposed Controller
The predictive controller previously presented in
Section 3 has been applied to the MG. The results presented in this section were obtained considering the following conditions:
The simulation used real data collected for a sunny day and a day with passing clouds.
Three similar sets of batteries that can reach a total capacity of kWh and a charging and discharging efficiency, respectively, and 10 similar greenhouses, such as those presented in the materials section, were considered.
The cost involved in the degradation of the batteries has been considered constant. In addition, the maintenance cost of the photovoltaic system has not been considered.
It is considered to maintain the state of charge of batteries at throughout the day.
Figure 10 shows the energy demand profiles for both types of day.
The cost function weights (
20) were adjusted using simulations.
The proposed controller was applied to the microgrid. The aim of the controller is to perform the energy management of the microgrid during changes in generation or loads. The controller was implemented in MATLAB [
45] using the YALMIP [
46] toolbox and the CPLEX [
47] solver.
The simulations were performed using a control horizon of samples and a prediction horizon, which varied from 6 to 15, ().
In order to verify the contributions of the models presented in
Section 4.1 and
Section 4.2 to the predictive control techniques, three different scenarios have been considered in this paper:
- (i)
Perfect information: Scenario 1 is performed assuming that the real data of demand ( and ) and energy production () are known.
- (ii)
Imperfect information: Scenario 2 is performed using the best forecasting models of demand (the NN model for and the ARX model ) and energy production (the NN model for ).
- (iii)
No Information: Scenario 3 is performed assuming that future values are not known and predictive models for demand ( and ) and energy production () are not used. This means that the predictions are considered constant along the prediction horizon.
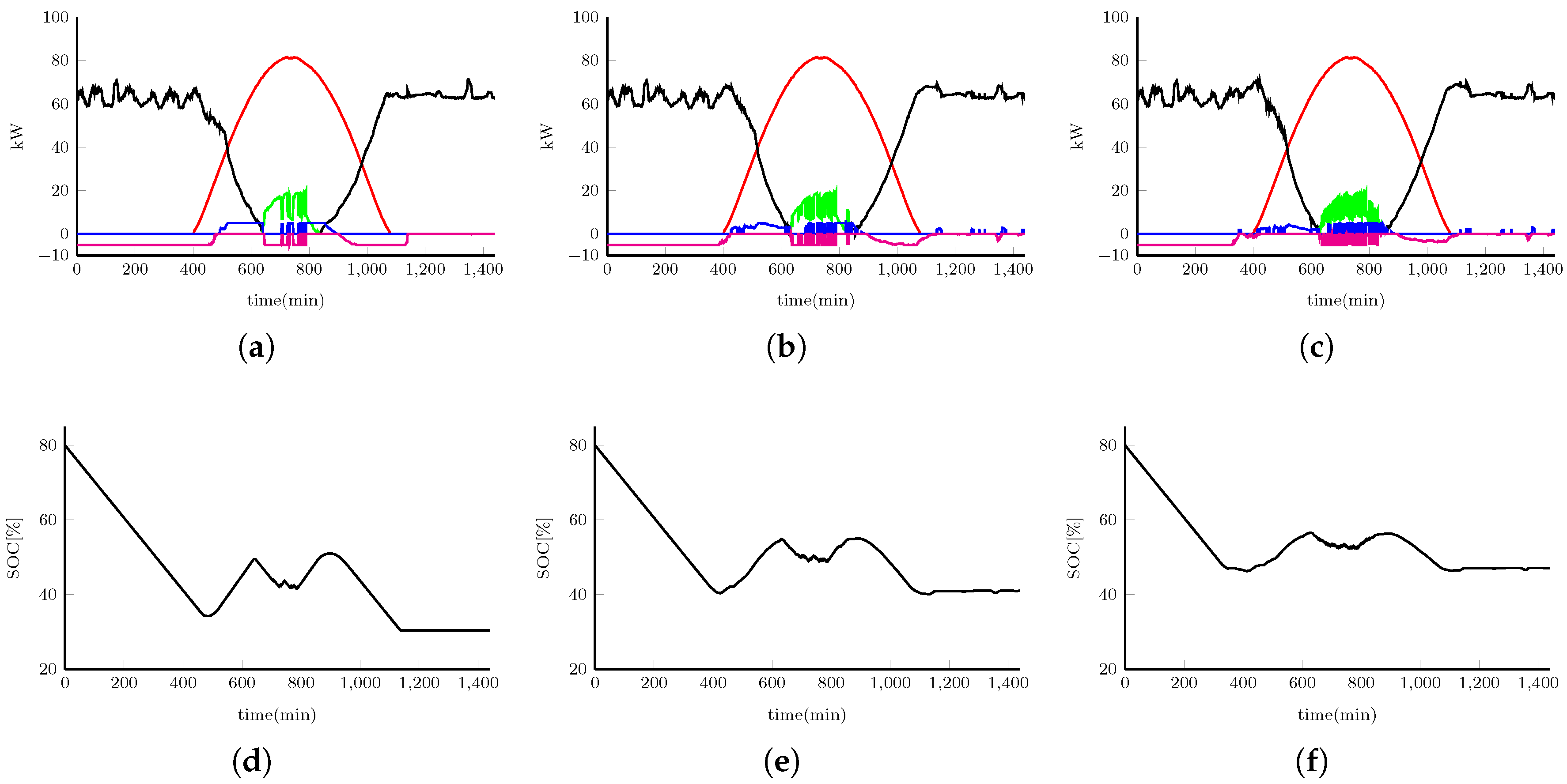
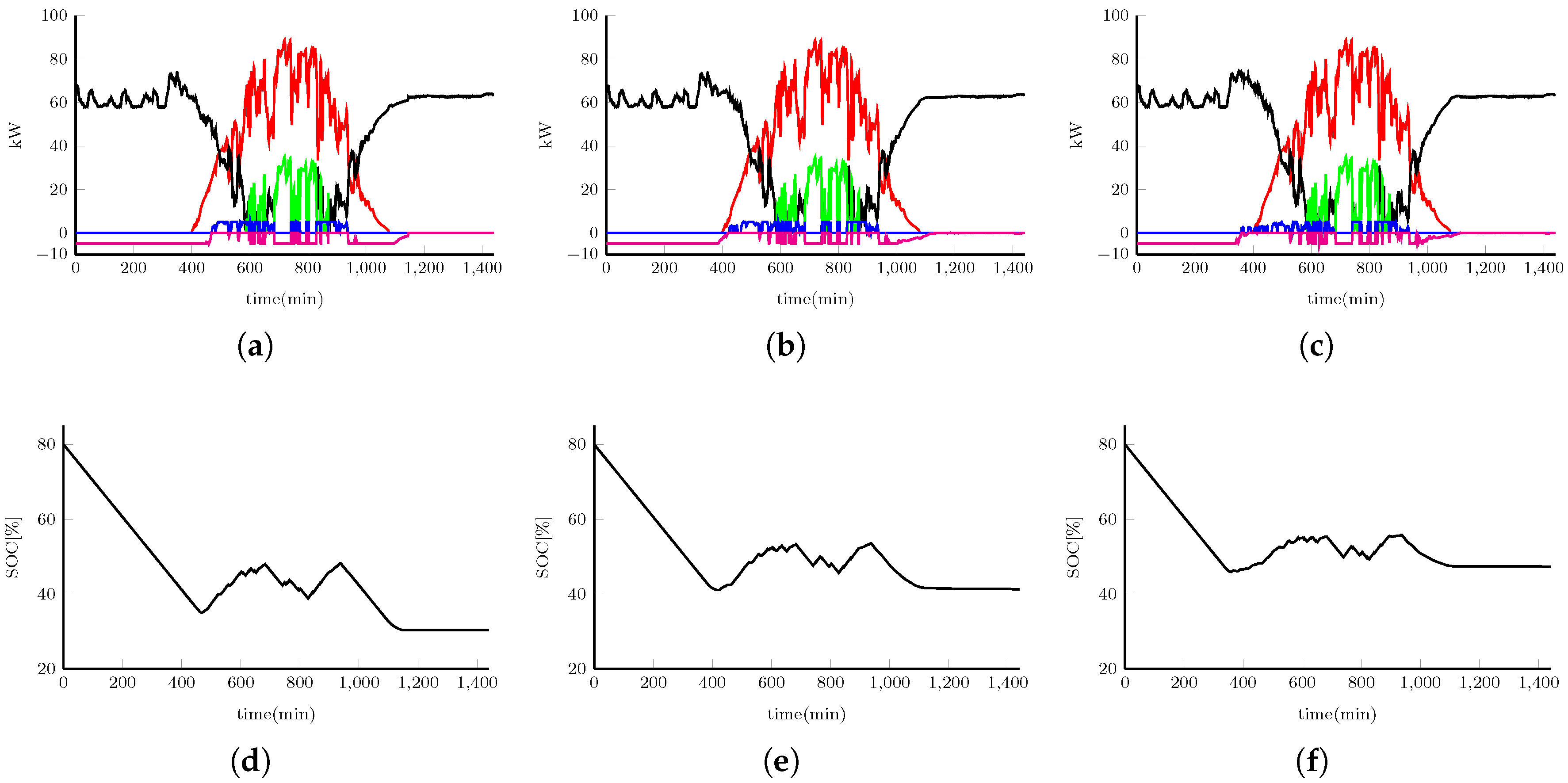
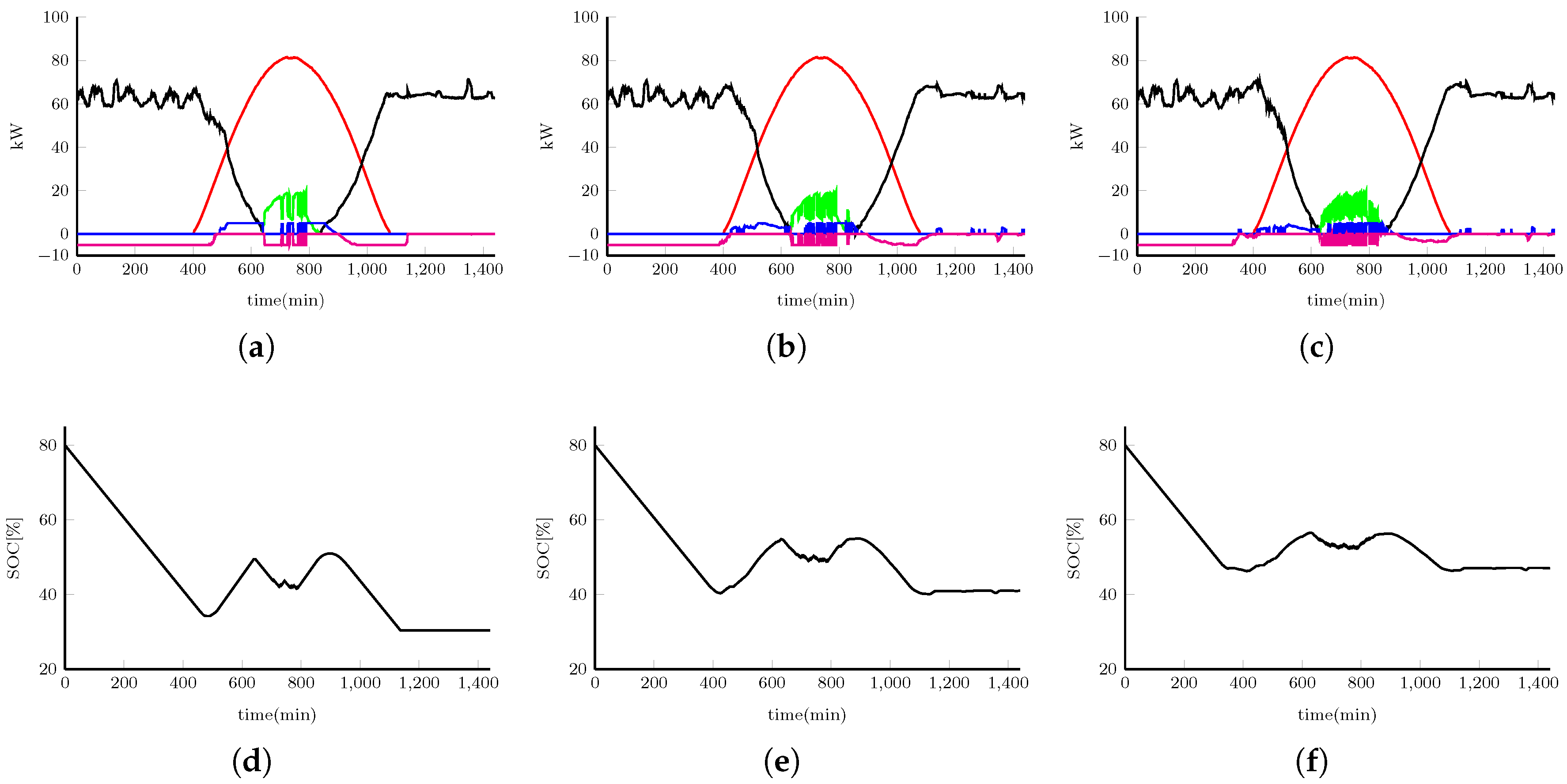
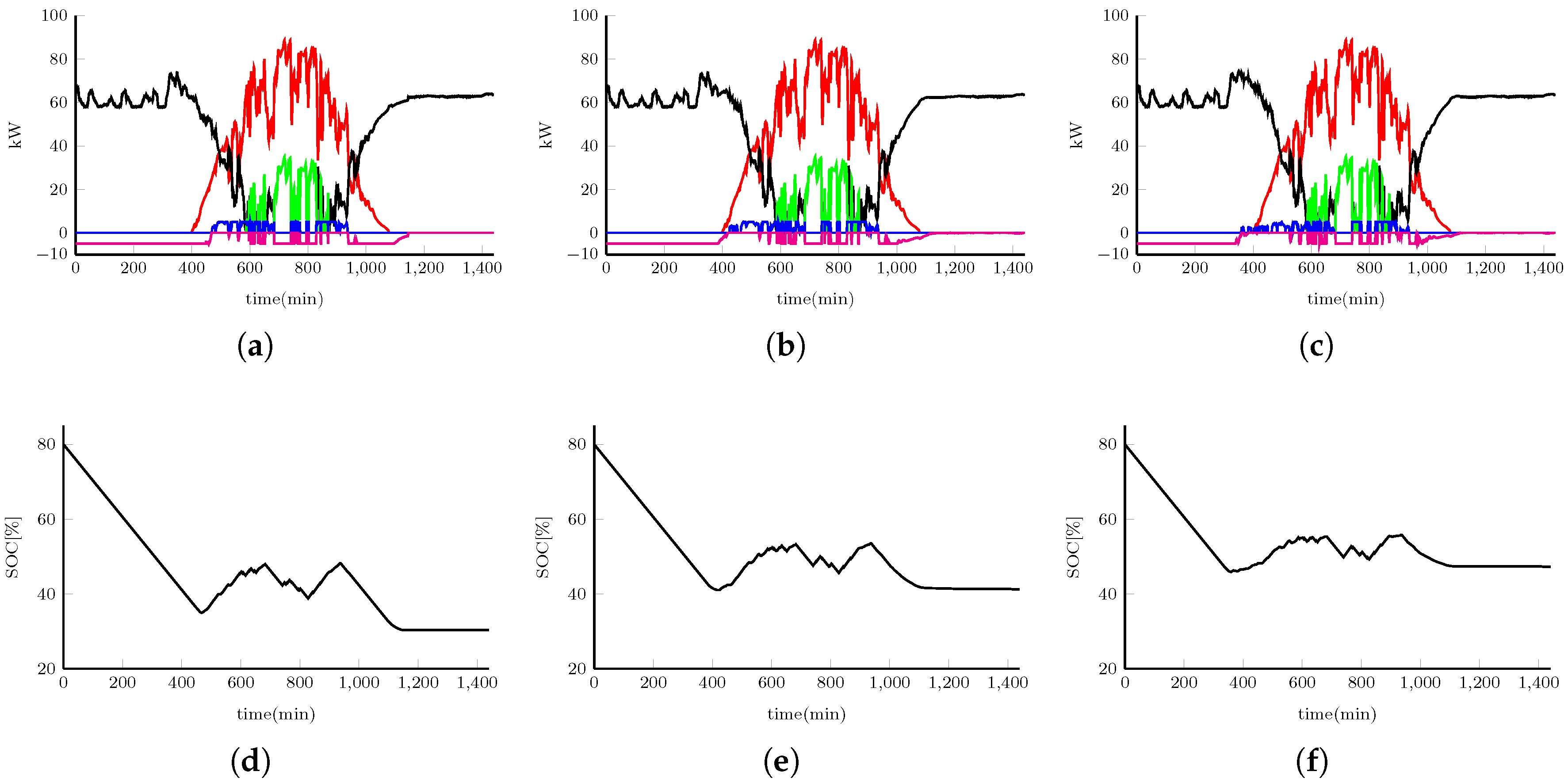
Figure 11 and
Figure 12 show the behavior simulations for the electrical energy distribution and the SOC in Scenario 2 on a sunny day and a day with passing clouds for a prediction horizon of 6, 10 and 15 samples, respectively. One can see that, as the prediction horizon grows, there are larger fluctuations in the variables
,
,
and
, causing greater effort from the batteries and resulting in more energy being bought and less energy being sold.
Figure 11d–f and
Figure 12d–f show how the SOC of the batteries tries to stay around its reference for a sunny day and for the day with passing clouds, respectively. Furthermore, one can observe that the lower prediction horizon has a greater variation range during the day. As can be seen, the three scenarios for both days have been realized trying to maintain the same level (
) of the SOC throughout the day and considering the design of the controller; this has been done with the aim of observing the contribution of prediction models. However, depending on the controller design, the results may vary. In the design of the controller, it could be required that at the end of the day, the SOC tries to maintain a different reference level.
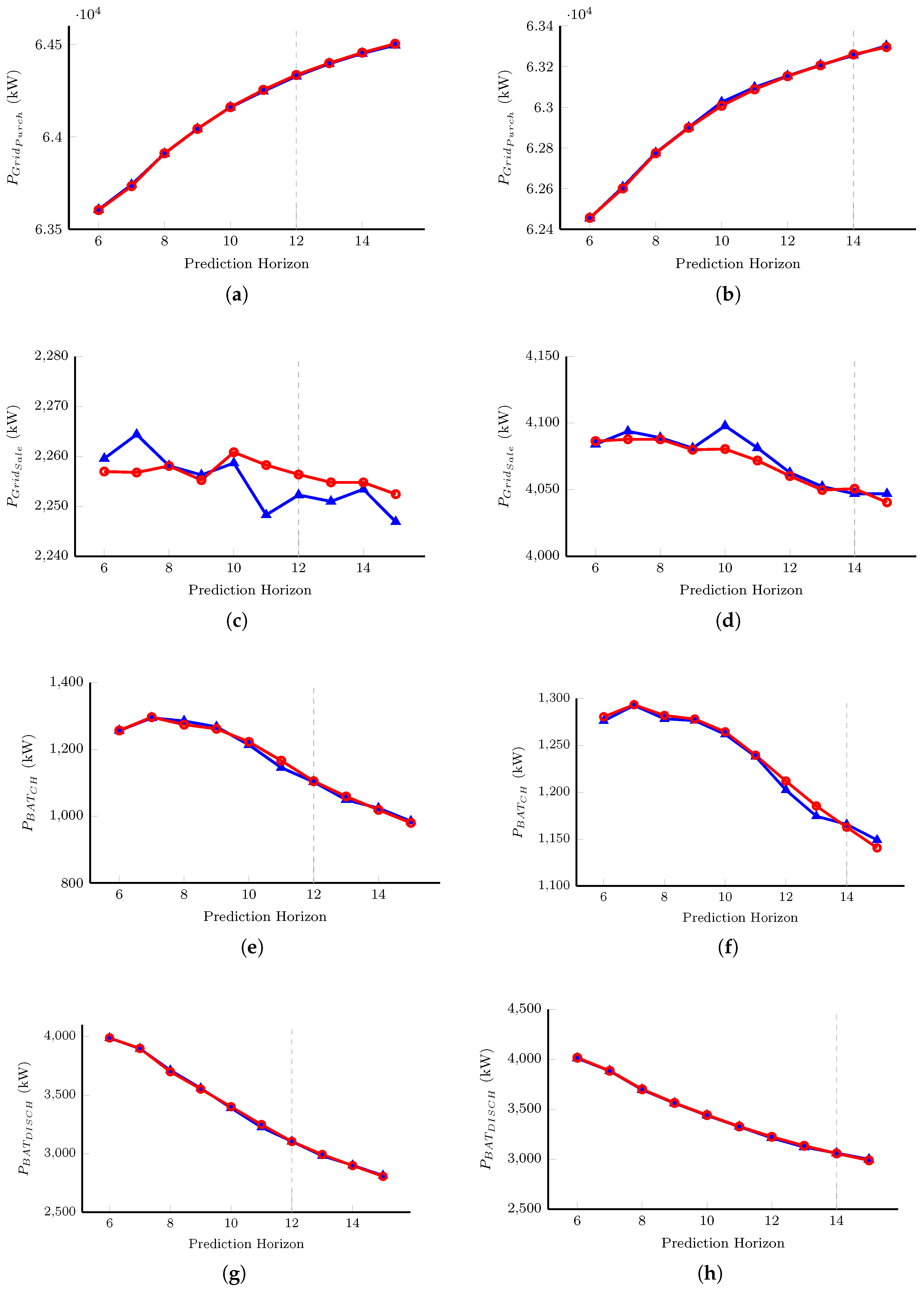
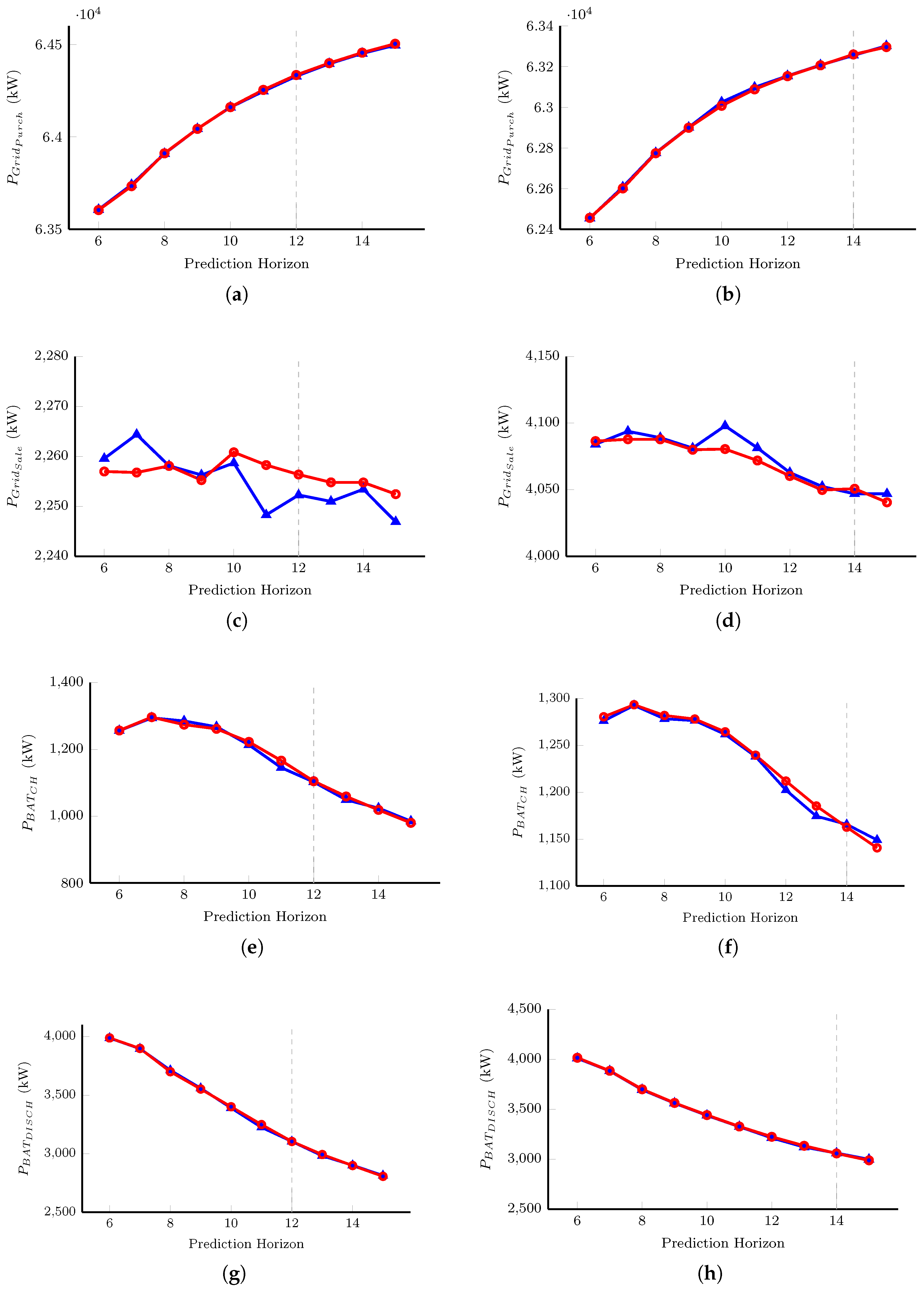
In addition, small differences can be observed by considering the total sum of each manipulated variable during the day (see
Table A1 and
Table A2 in
Appendix B and
Figure 13), where the trend of the variables is shown; these trends indicate in a generalized way that as the prediction horizon increases, more energy is bought and less energy sold, while there is less energy charging and less energy being discharged into the batteries.
Furthermore, it can be observed that on the sunny day, Scenario 2 generated better results than Scenario 3 for a horizon prediction of 6–11; while for a prediction horizon of 12 and above, it is evident that Scenario 3 is closer to Scenario 1. Conversely, on the day with passing clouds, with a prediction horizon of 6–13, Scenario 2 presents better results than Scenario 3.
To observe the differences in Scenario 2 and Scenario 3 compared to Scenario 1, the average absolute error
was used. This index is given by:
for
.
For the optimal distribution of energy, it is a priority to have less energy purchased (
), more energy sold (
) and to have greater use of the batteries; that is to say, in terms of charging (
) and discharging (
), but with less fluctuations. Consequently, a prediction horizon of eight and six yields the best results on the sunny day and the day with passing clouds, respectively, using Scenario 2; this is shown in
Figure 13 and
Table 6, where
and
show the performance of Scenario 2 compared to Scenario 1, and Scenario 3 compared to Scenario 1, respectively.
As shown in
Figure 13 and
Table 6, for the sunny day up to horizon 11, Scenario 2 gives better results, whereas starting from horizon 12, the best choice is Scenario 3. The same analysis can be carried out for the cloudy day, where the changing point is horizon 14. Regarding the energy exchanged with the main grid, it is possible to conclude that, for Scenario 2 with small prediction horizons, the controller decided to sell more energy than it did with longer horizons, when compared to Scenario 3. This is due to the fact that predictions are better with smaller horizons and are degraded as the horizon increases. It is important to point out that, in this particular case, the amount of energy sold to the main grid is low due to the small amount of excess power from the solar panels; this can be raised by increasing the PV panels’ nominal power. This MG change can provide a more profitable economical operating point.
5. Conclusions and Future Works
This work presents the use of different time series forecast and neural network methods to obtain energy demand and energy production estimations. In addition, a controller has been proposed to optimize the use of renewable energies in a microgrid; this controller has also been proposed to regulate battery use, where charging and discharging of the battery system is allowed to oscillate around a desired load value. Furthermore, the contribution of short-term model prediction has been verified for optimal energy distribution (based on MPC) in an MG. As can be observed, although the differences are minimal, the use of short-term prediction models provides an improvement on the optimal distribution of energy for prediction horizons of less than 12 min on the sunny day and less than 14 min on the day with passing clouds.
In future work, the use of the electric vehicle will be considered as a vehicle connected to the grid (V2G). Furthermore, prediction models will be recalibrated to improve horizon predictions over 15 min; moreover, uncertainties will be considered of the PV system and load demand using the probability density function (PDF) of solar radiation and the normal distribution function for prediction purposes. We will propose a secondary level controller over a slow time scale (1 h). The aim is to carry out an economic optimization where the purchase and sale prices (€/kWh) of energy are considered; these prices vary hourly according to the daily market. Another important topic is to deal with the stochastic nature of prediction errors using probabilistic constraints.



 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




 ) Measured, (
) Measured, (  ) ARMA model, (
) ARMA model, (  ) NN model.
) NN model.
 ) day with passing clouds.
) day with passing clouds.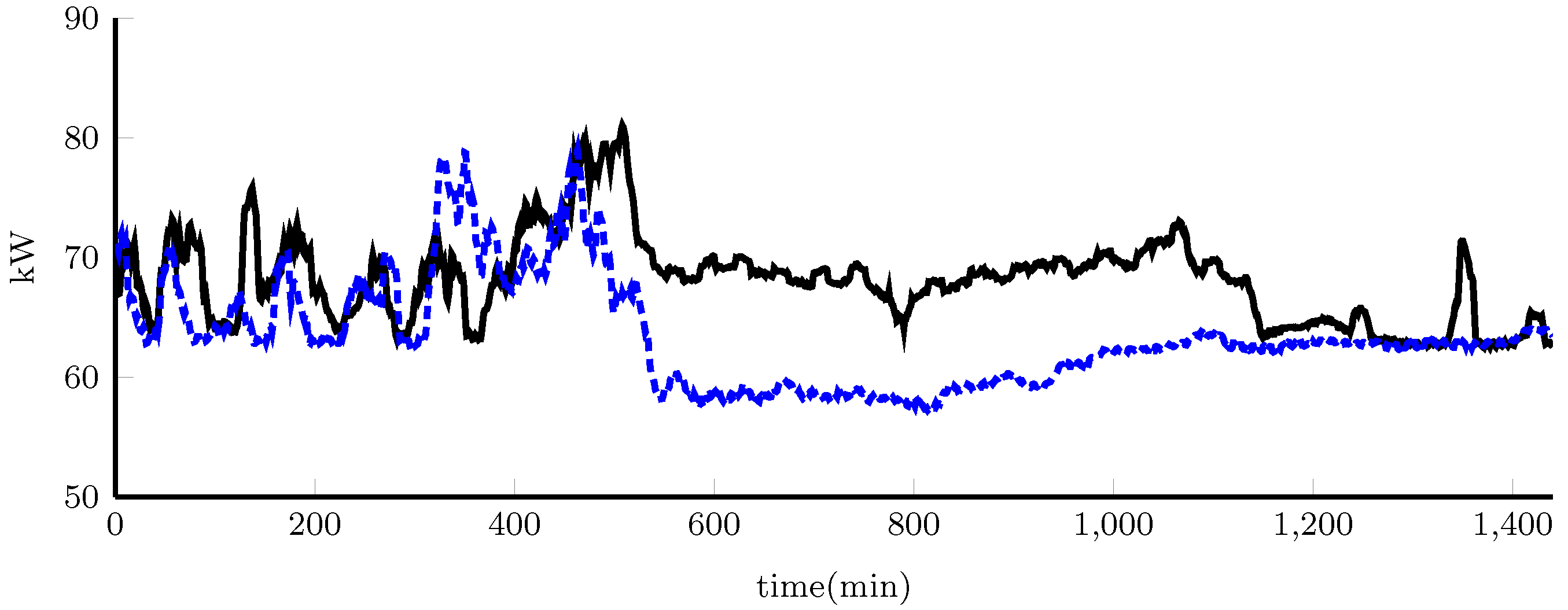
 ) , (
) , (  ) and (d–f) state of charge of the batteries. Results with a 6- (a,d), 10- (b,e) and 15-sample (c,f) prediction horizon.
) and (d–f) state of charge of the batteries. Results with a 6- (a,d), 10- (b,e) and 15-sample (c,f) prediction horizon.
 ) is Scenario 2 and (
) is Scenario 2 and (  ) is Scenario 3.
) is Scenario 3.