
Modified Synchronous Reference Frame Based Shunt Active Power Filter with Fuzzy Logic Control Pulse Width Modulation Inverter

 ,
,  , and
, and
Abstract
:1. Introduction
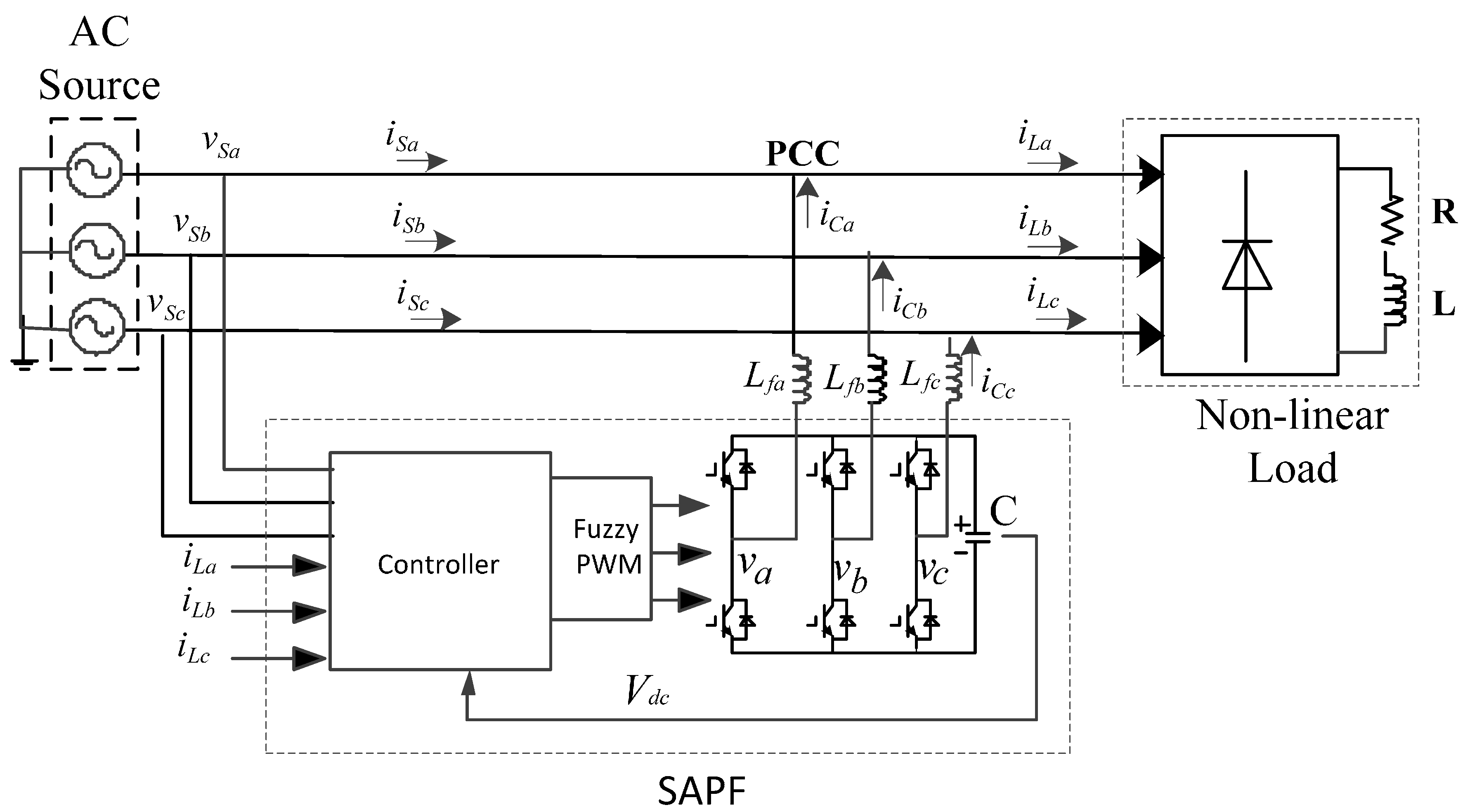
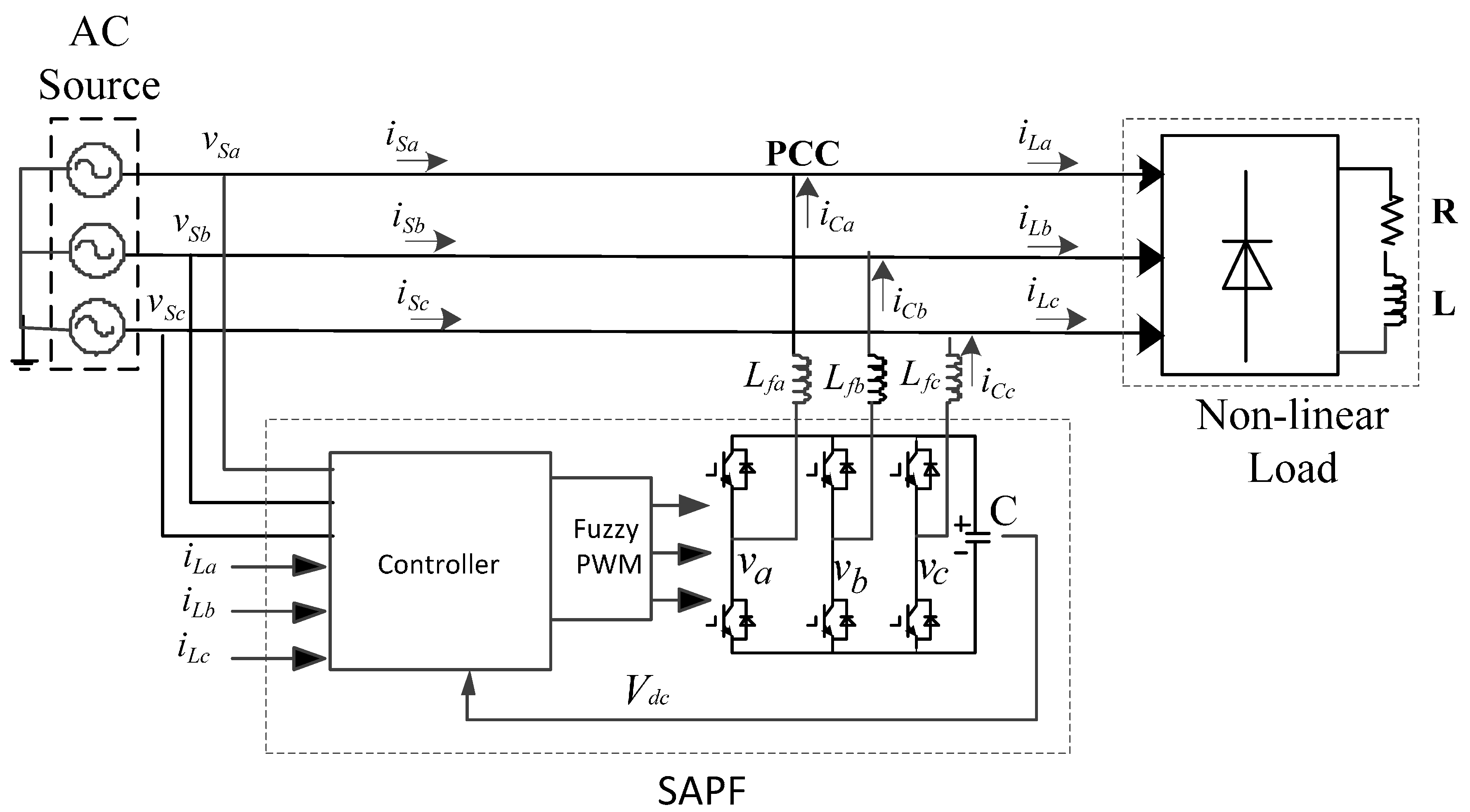
2. Proposed SAPF
3. Control Strategies
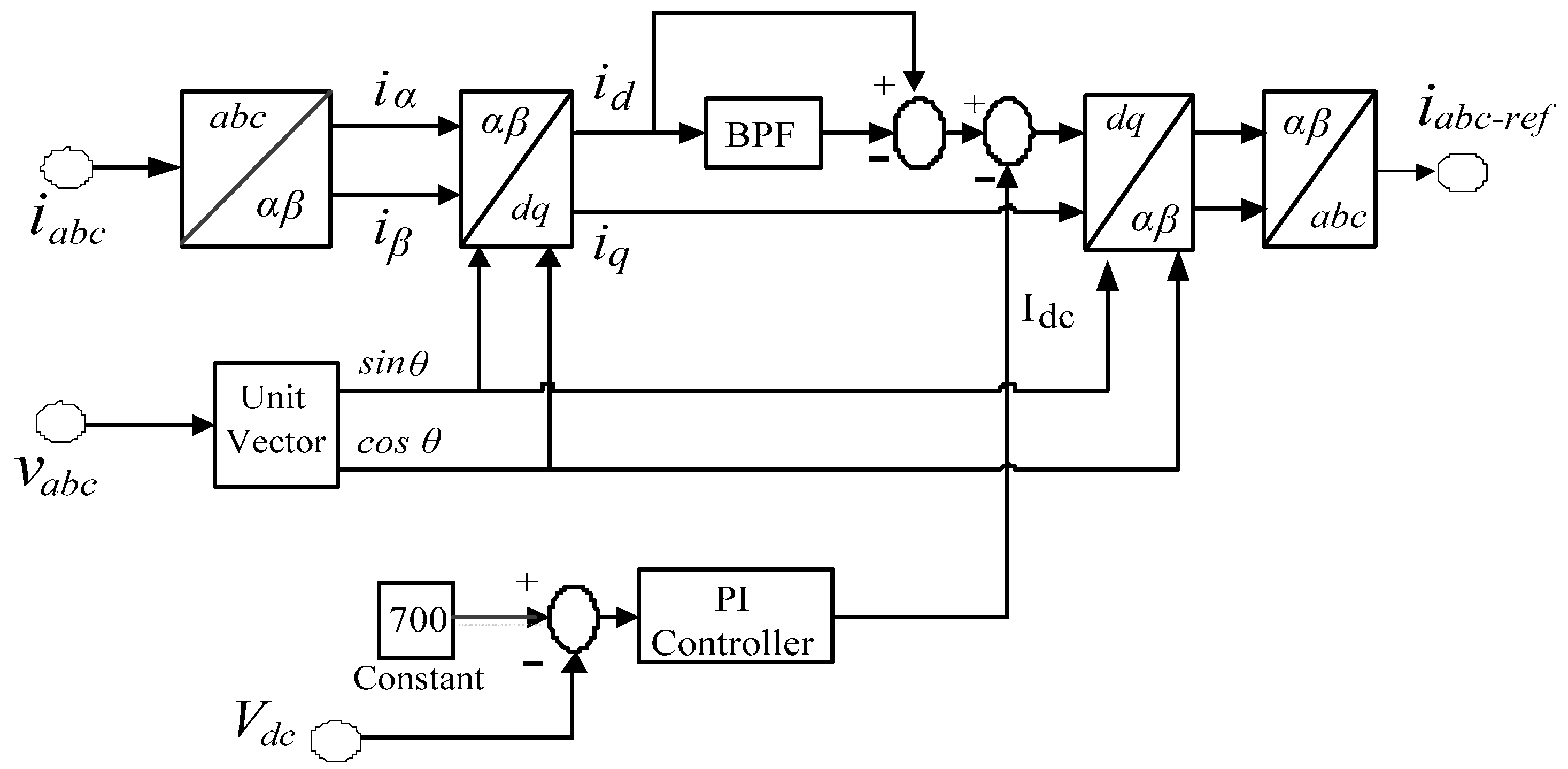
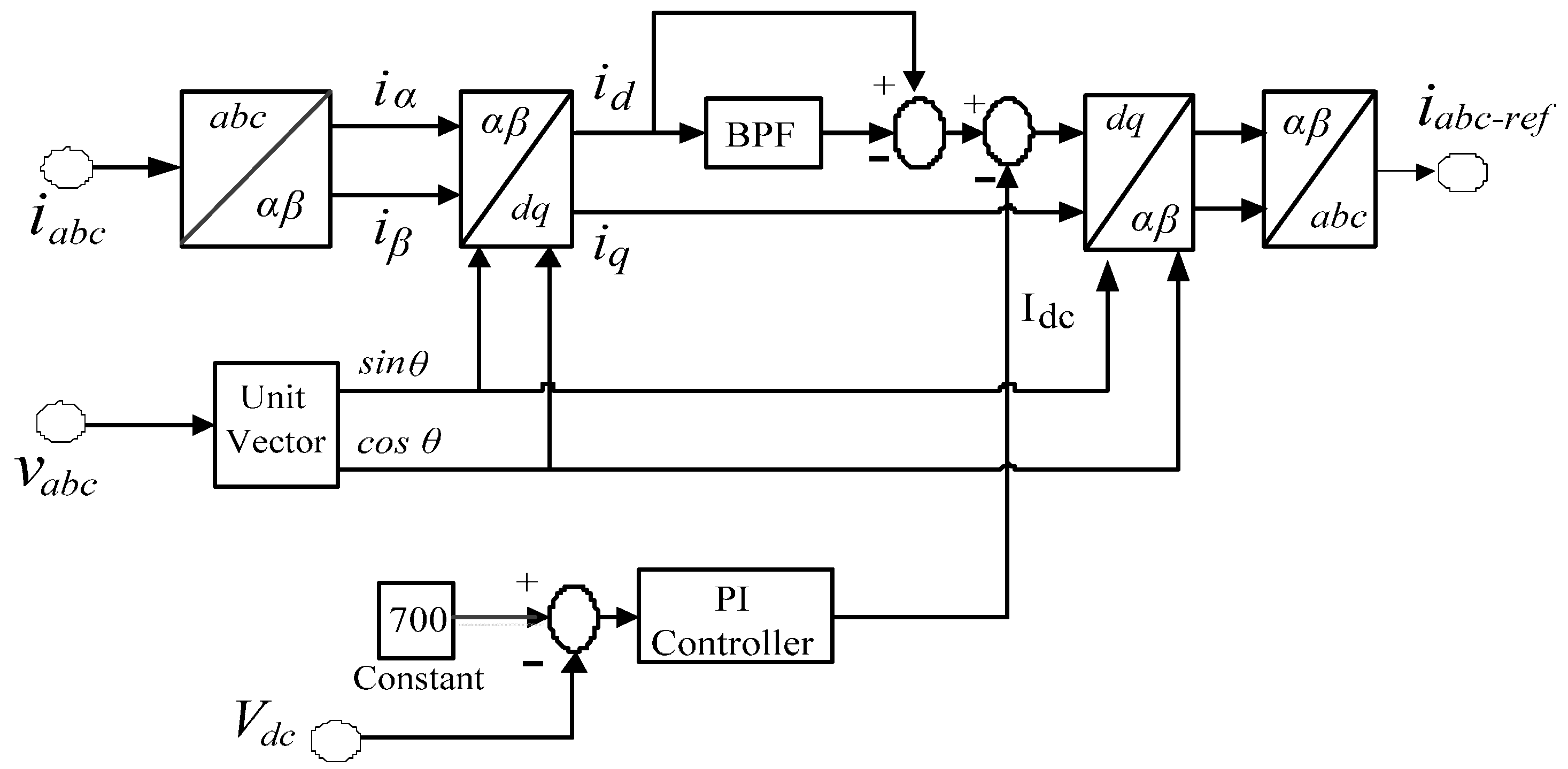
3.1. Modified Synchronous Reference Frame (MSRF)
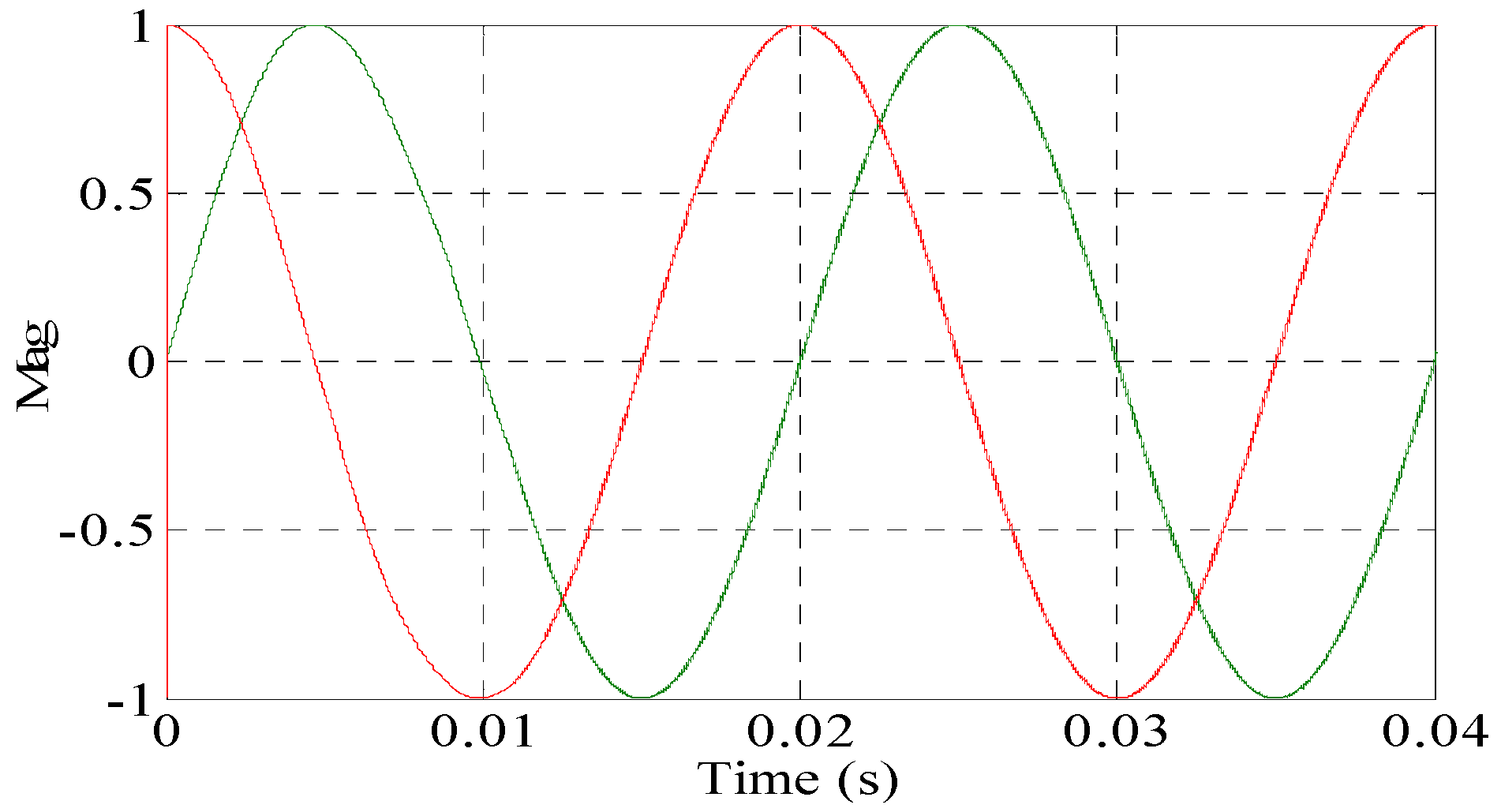
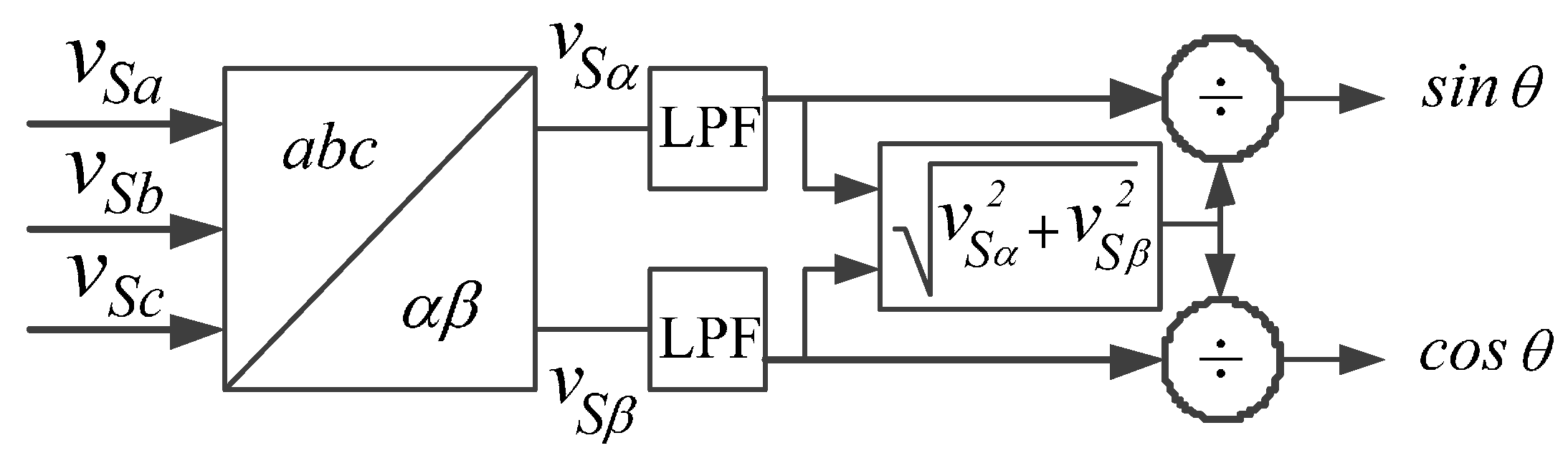
3.2. Unit Vector
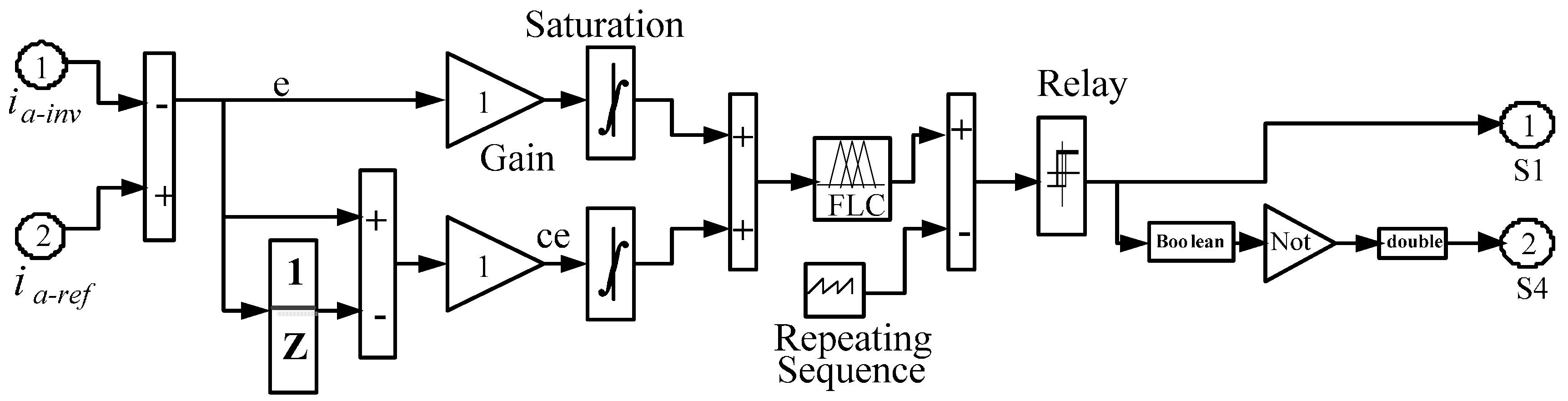
4. Fuzzy Logic Current Control
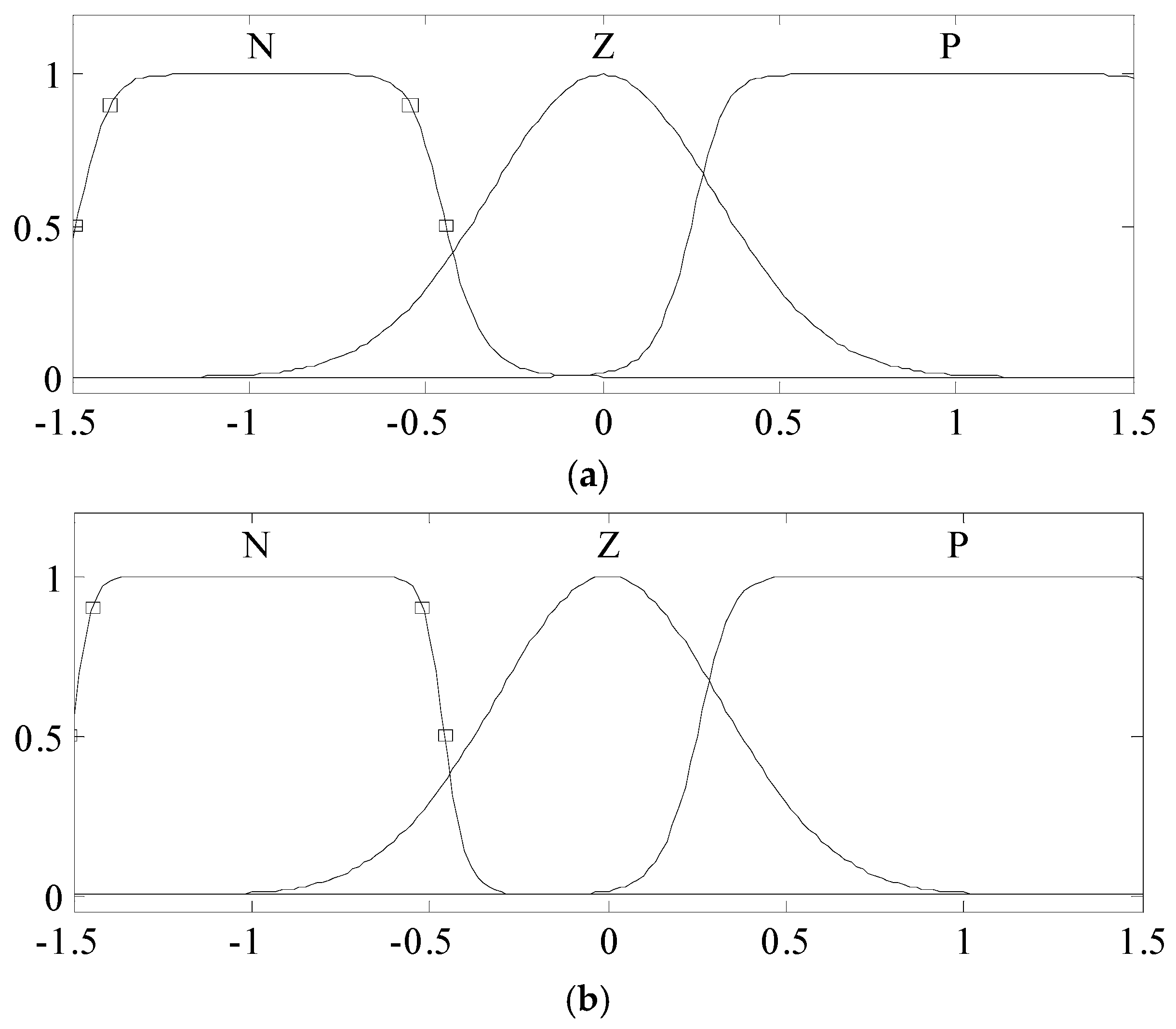
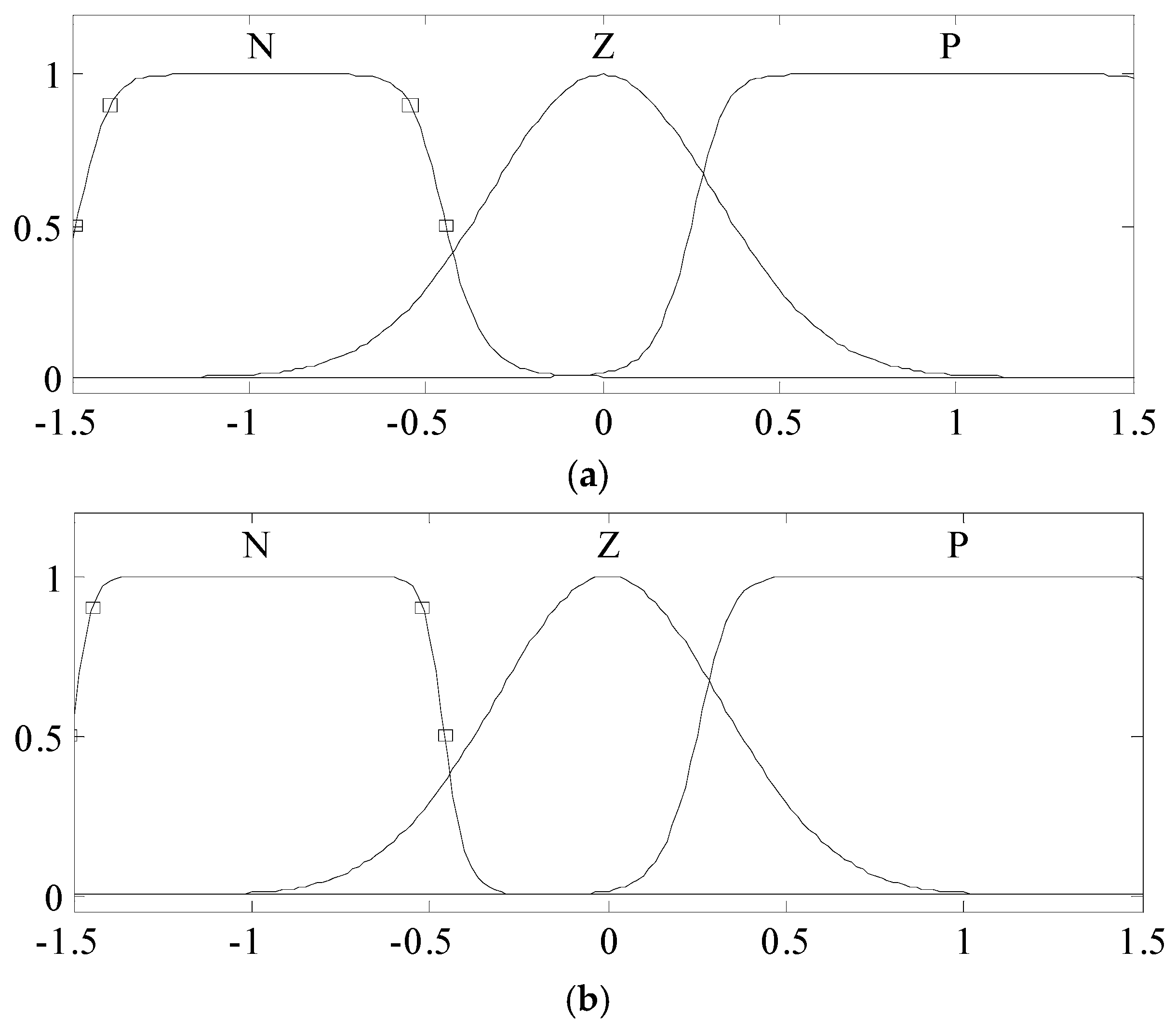
- For the two input variables, three fuzzy sets are configured involving two Bell functions and one Gaussian membership function, that are N (negative), Z (zero), and P (positive), as shown in Figure 4.
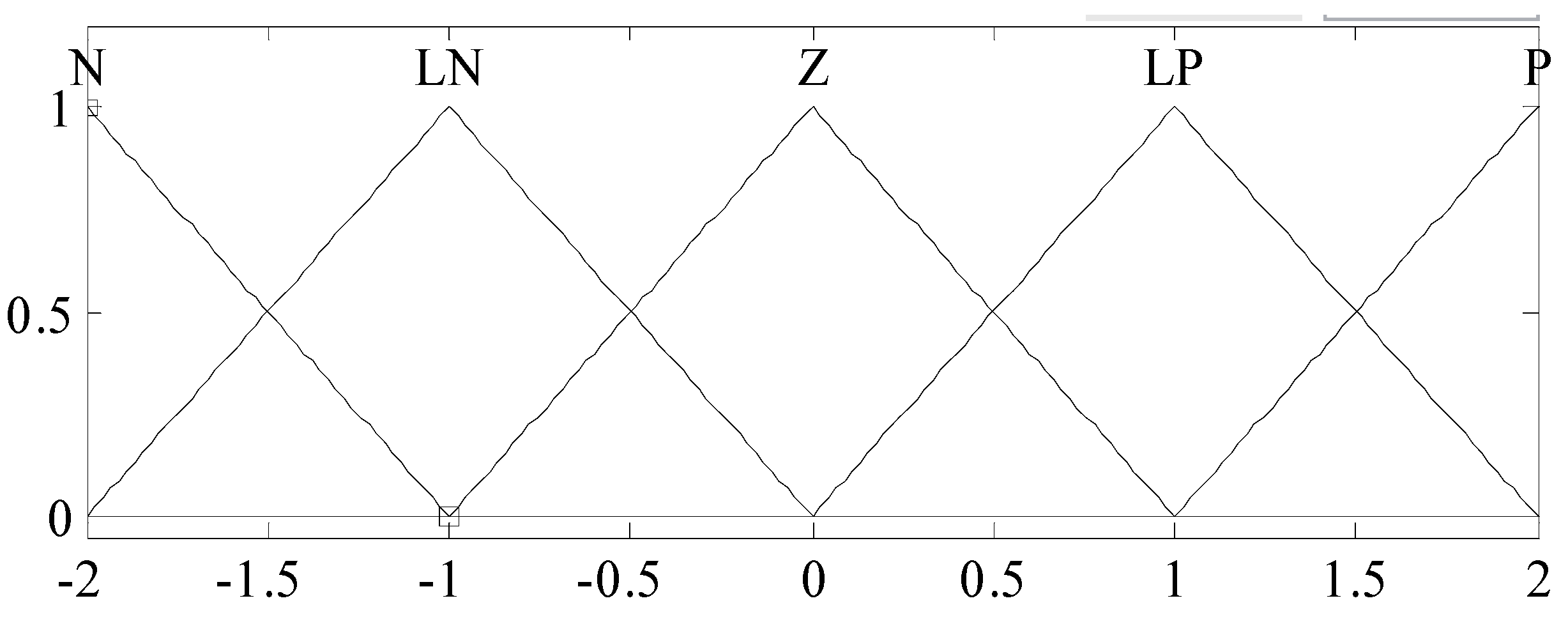
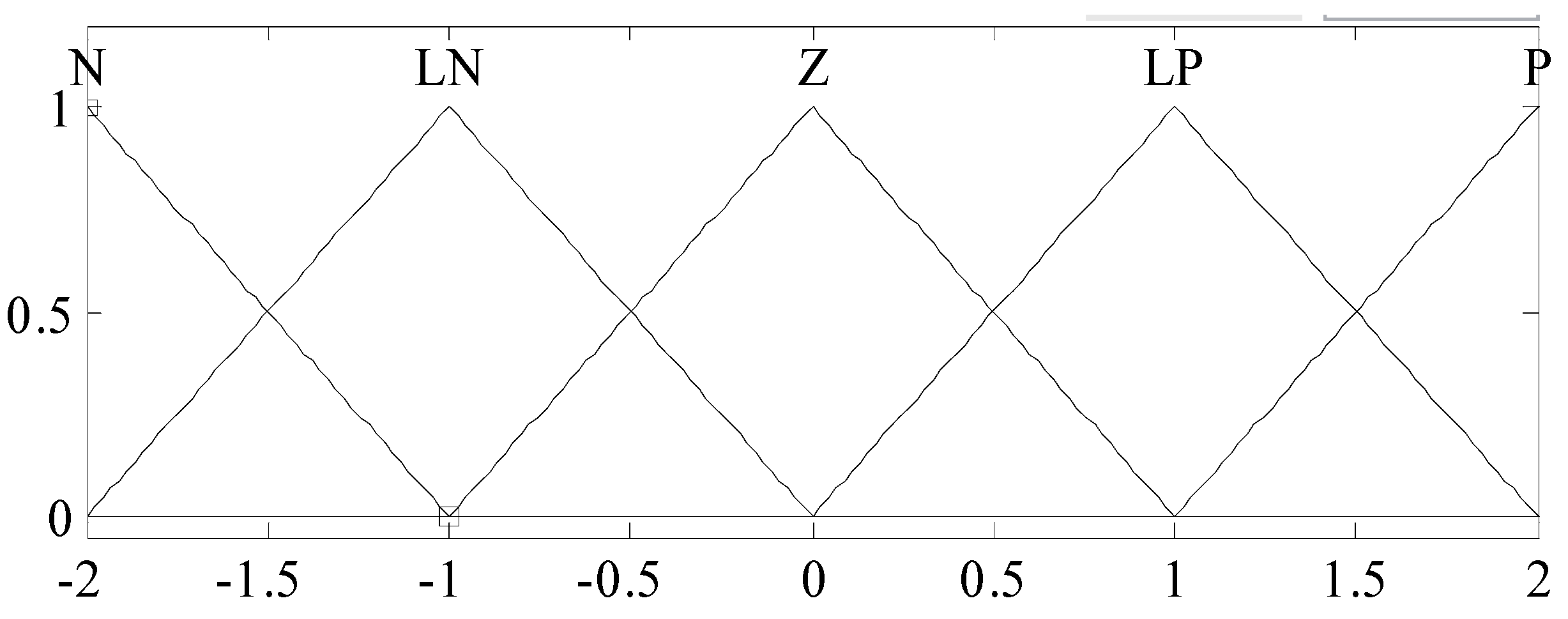
- In the case of output variables, five fuzzy sets comprised of the triangular membership function are configured as shown in Figure 5, N (negative), LN (less negative), Z (zero), LP (less positive), and P (positive).
- Defuzzification using centroid means.
- If (error is N) and (c error is N) then (output is N).
- If (error is N) and (c error is Z) then (output is LN).
- If (error is N) and (c error is P) then (output is Z).
- If (error is Z) and (c error is N) then (output is LN).
- If (error is Z) and (c error is Z) then (output is Z).
- If (error is Z) and (c error is P) then (output is LP).
- If (error is P) and (c error is N) then (output is Z).
- If (error is P) and (c error is Z) then (output is LP).
- If (error is P) and (c error is P) then (output is P).
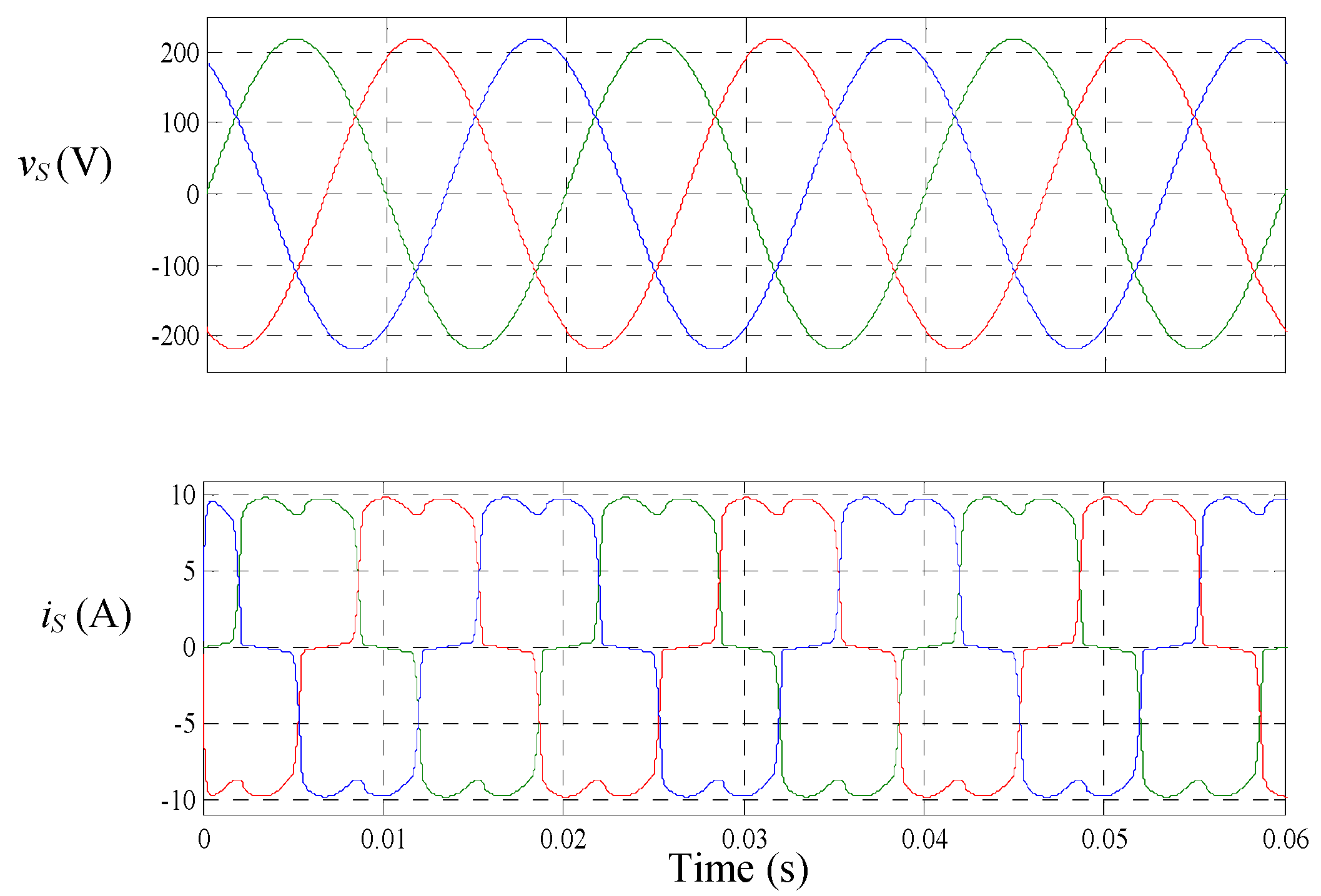
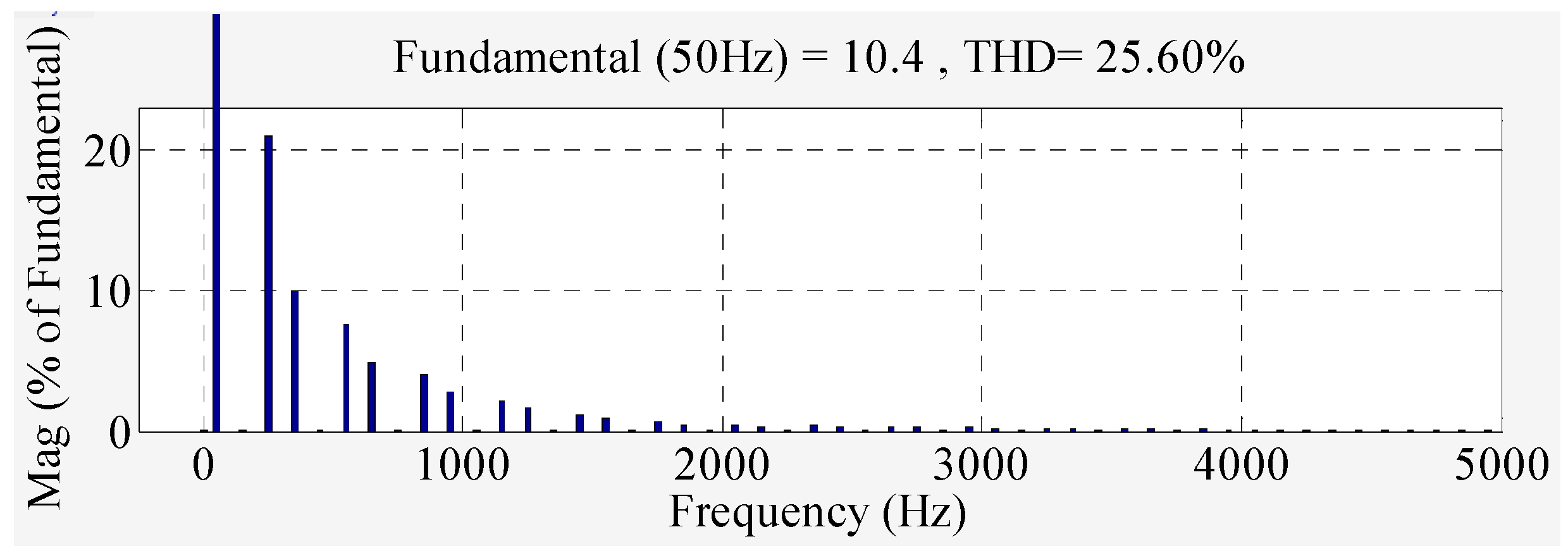
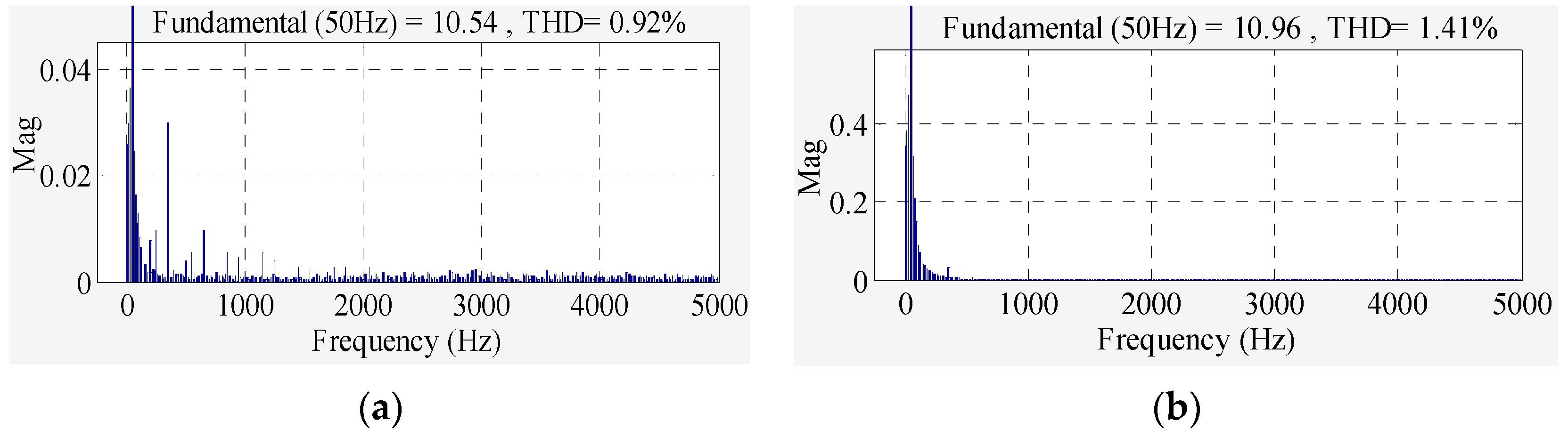
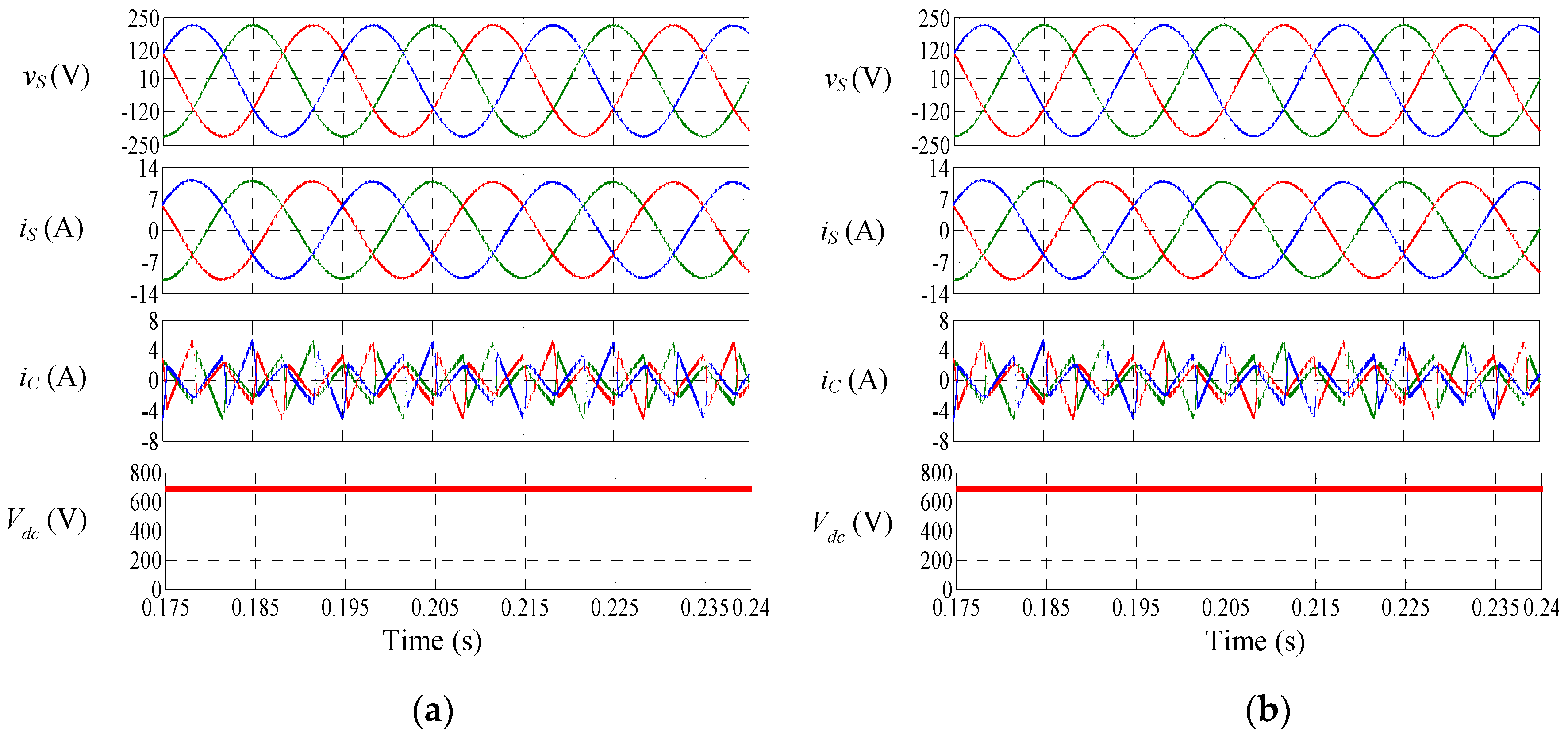
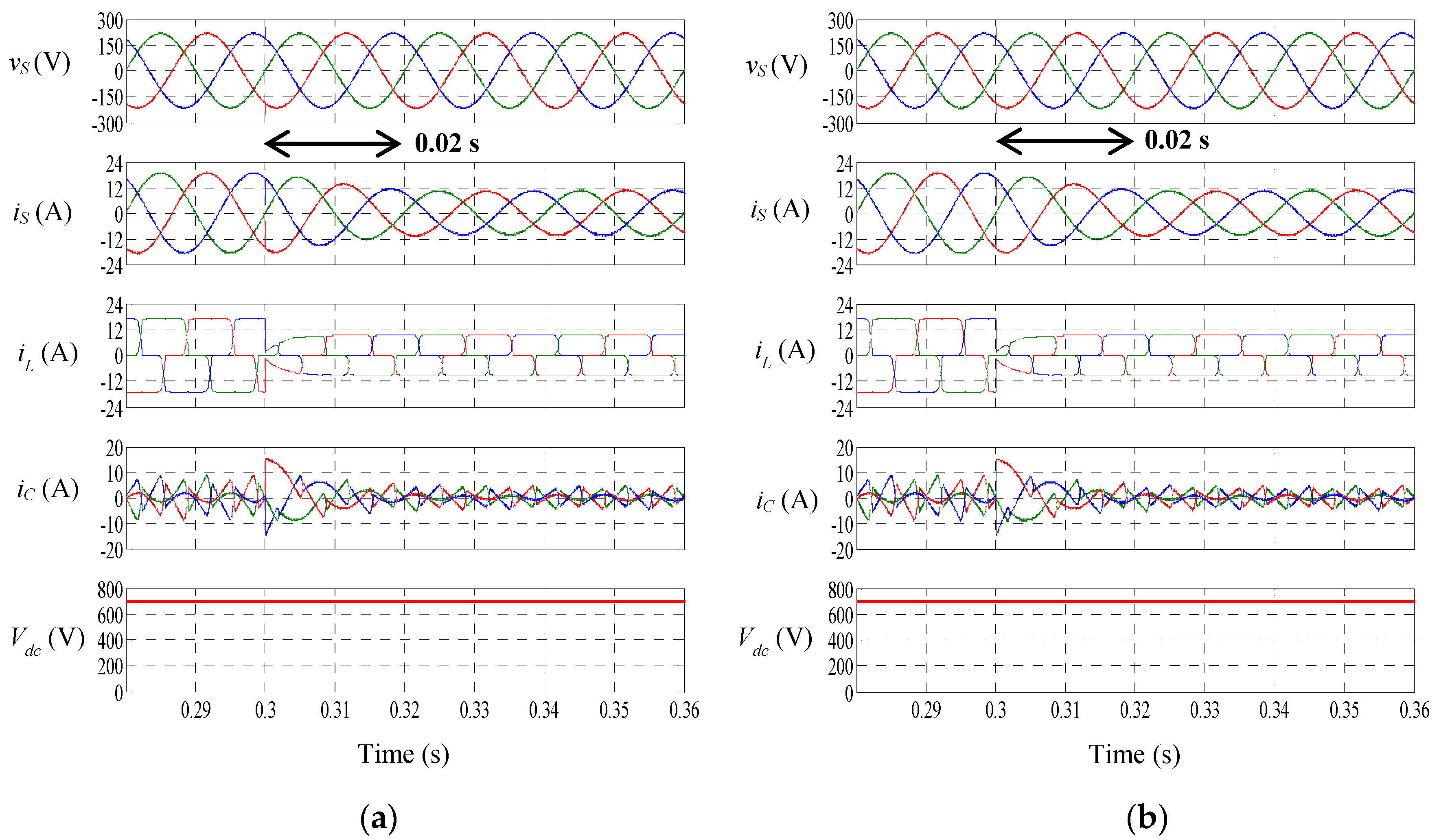
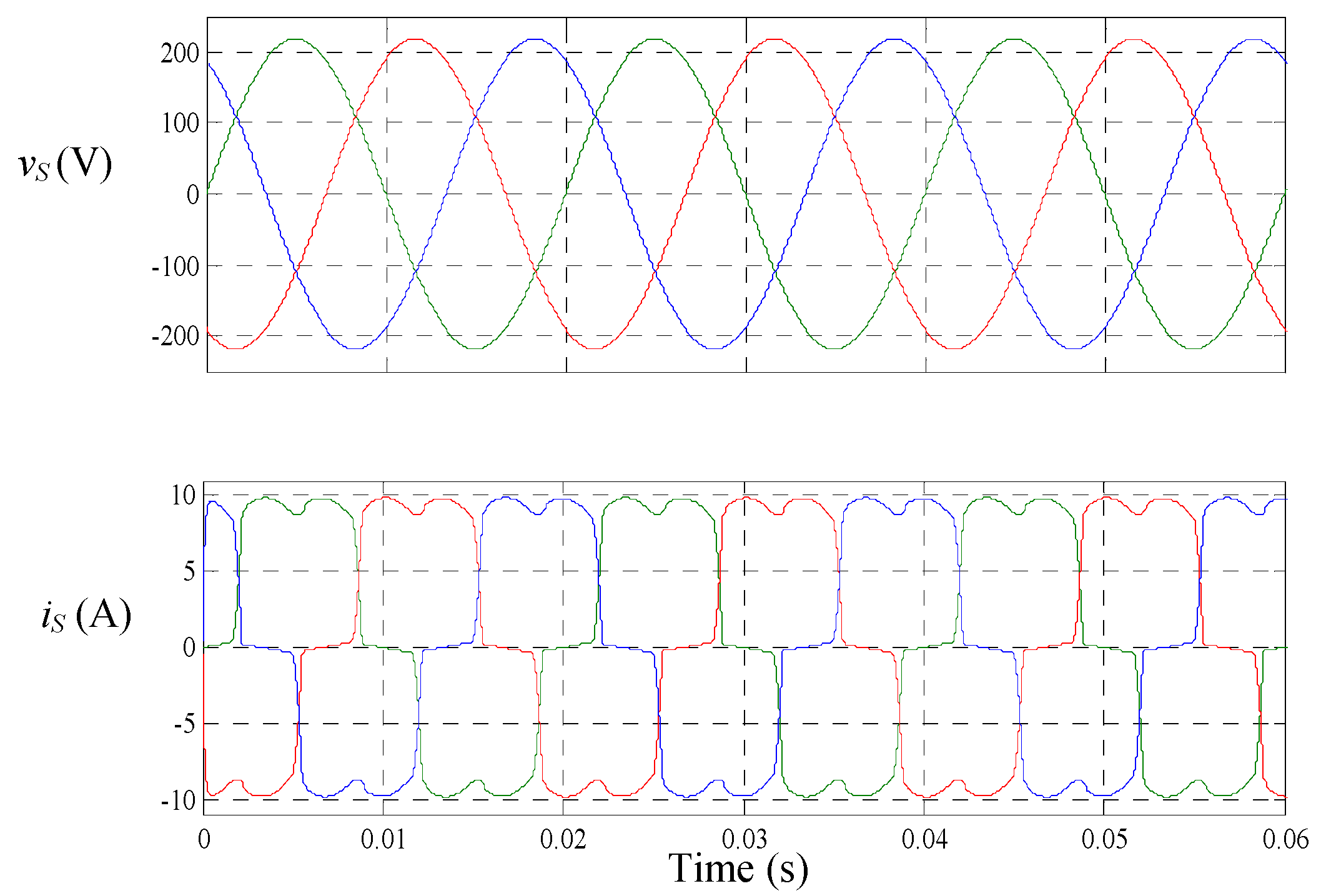
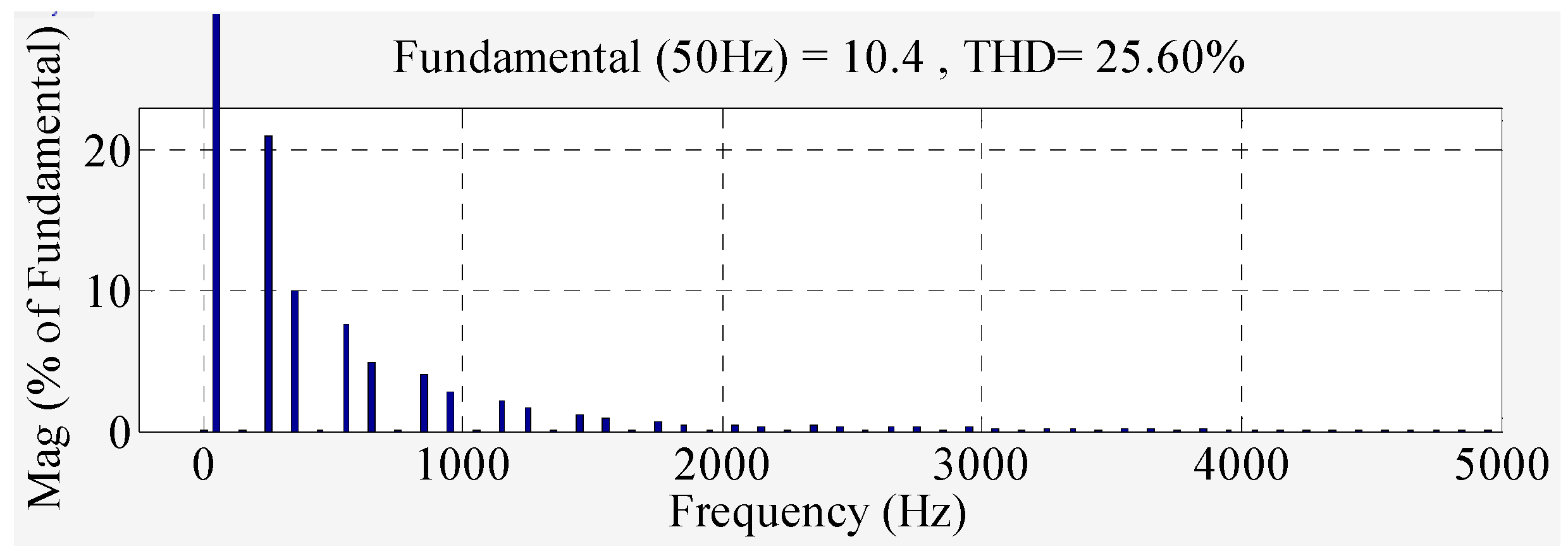
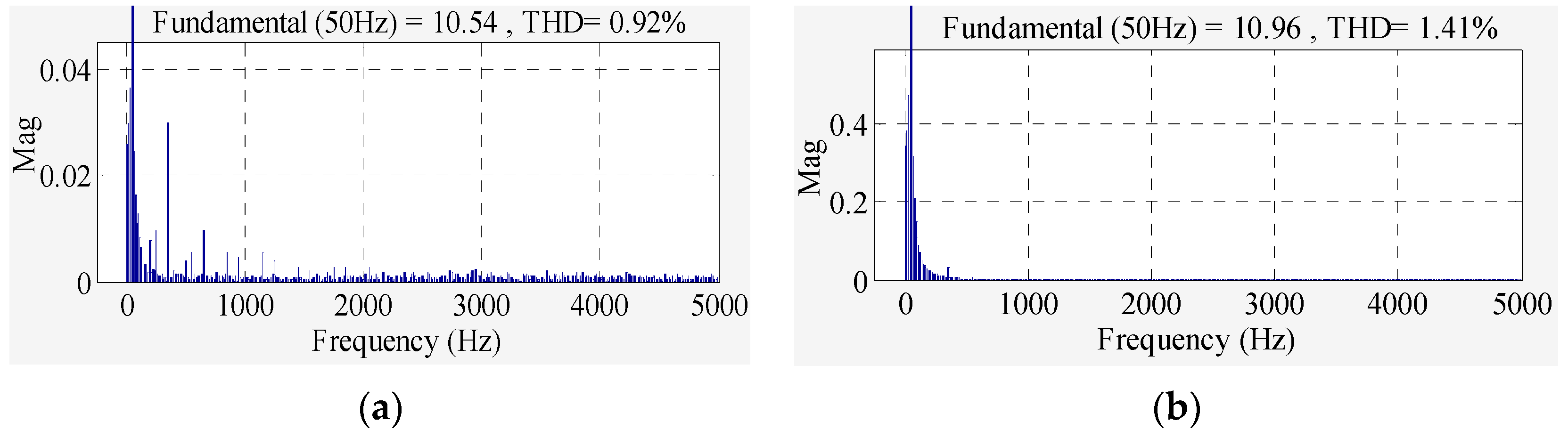
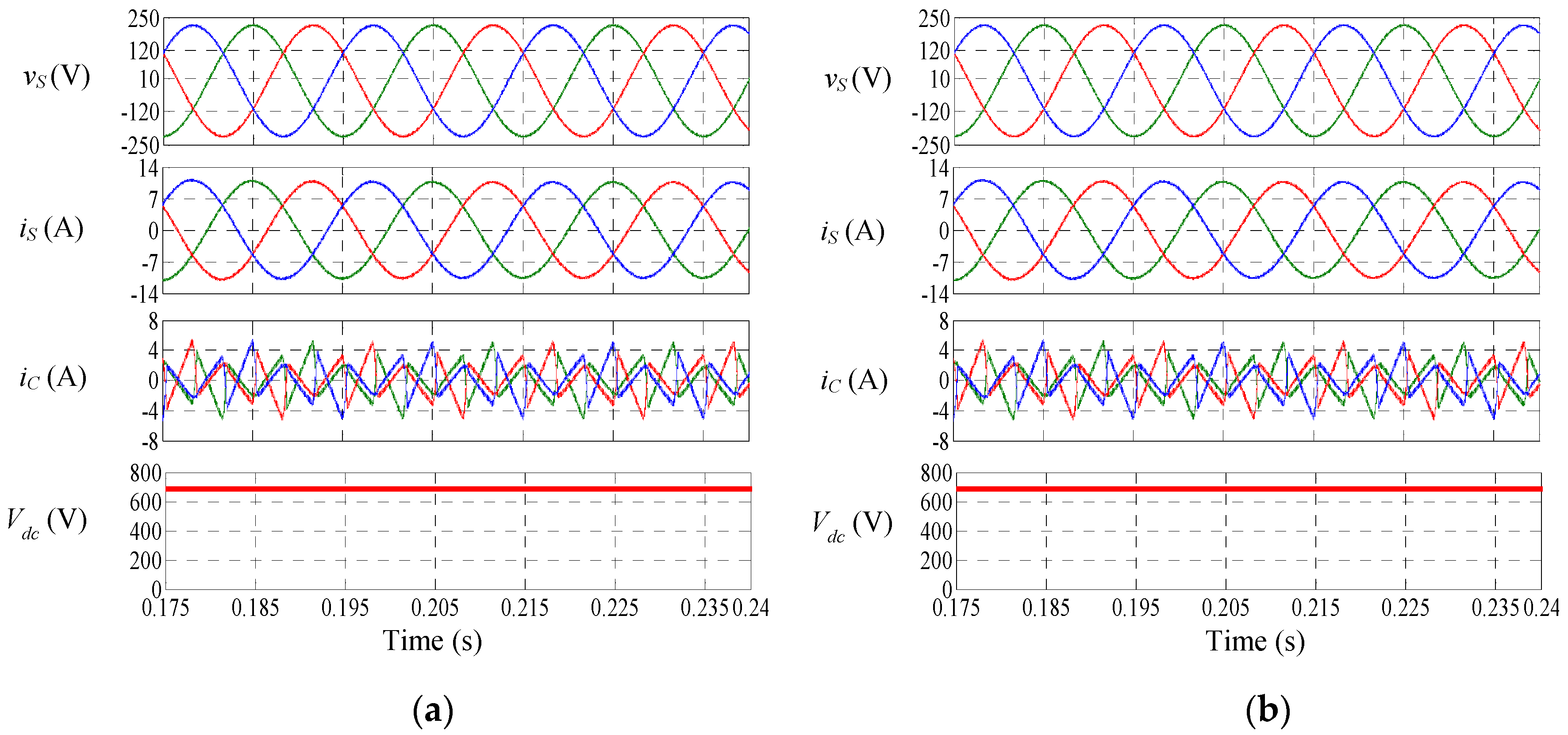
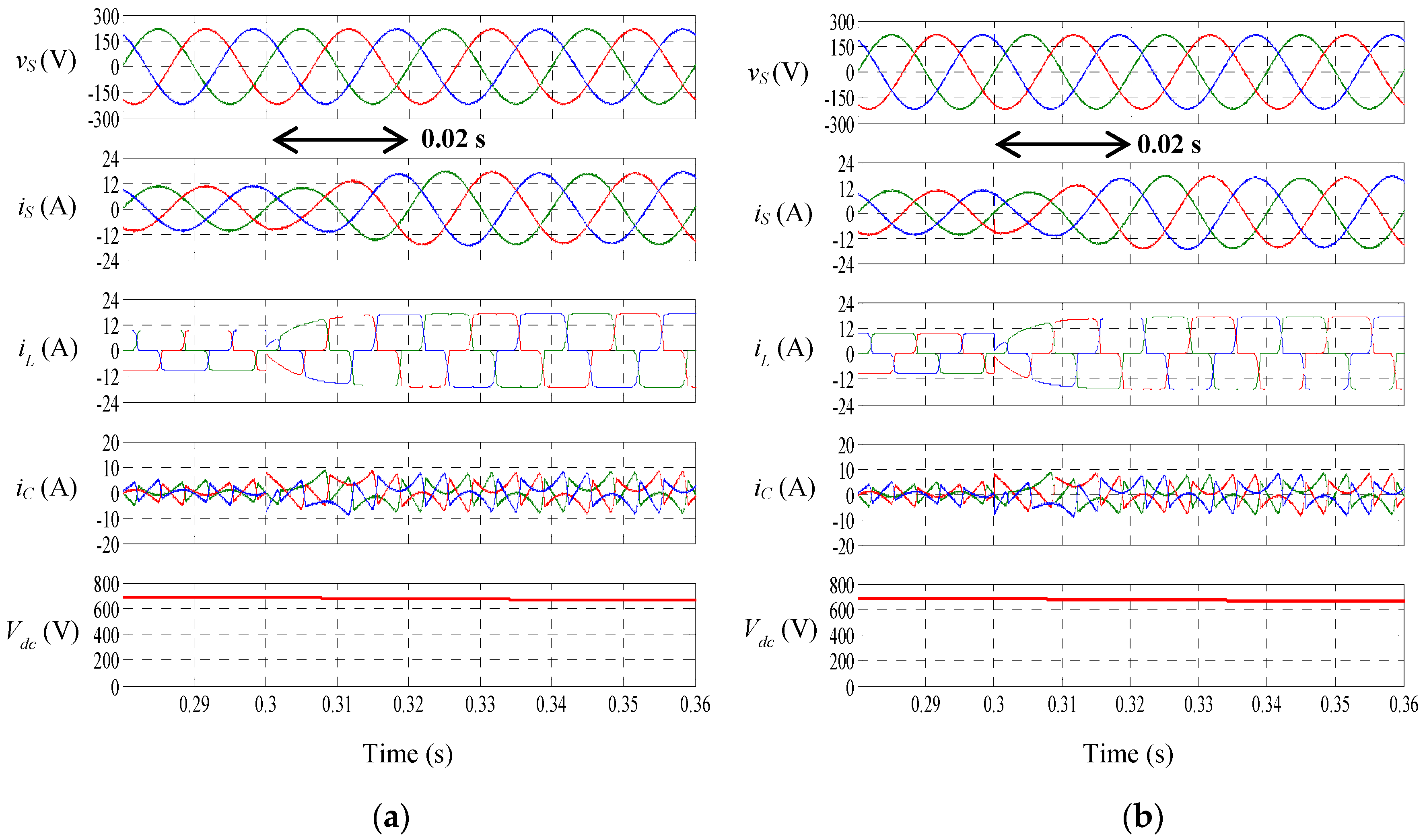
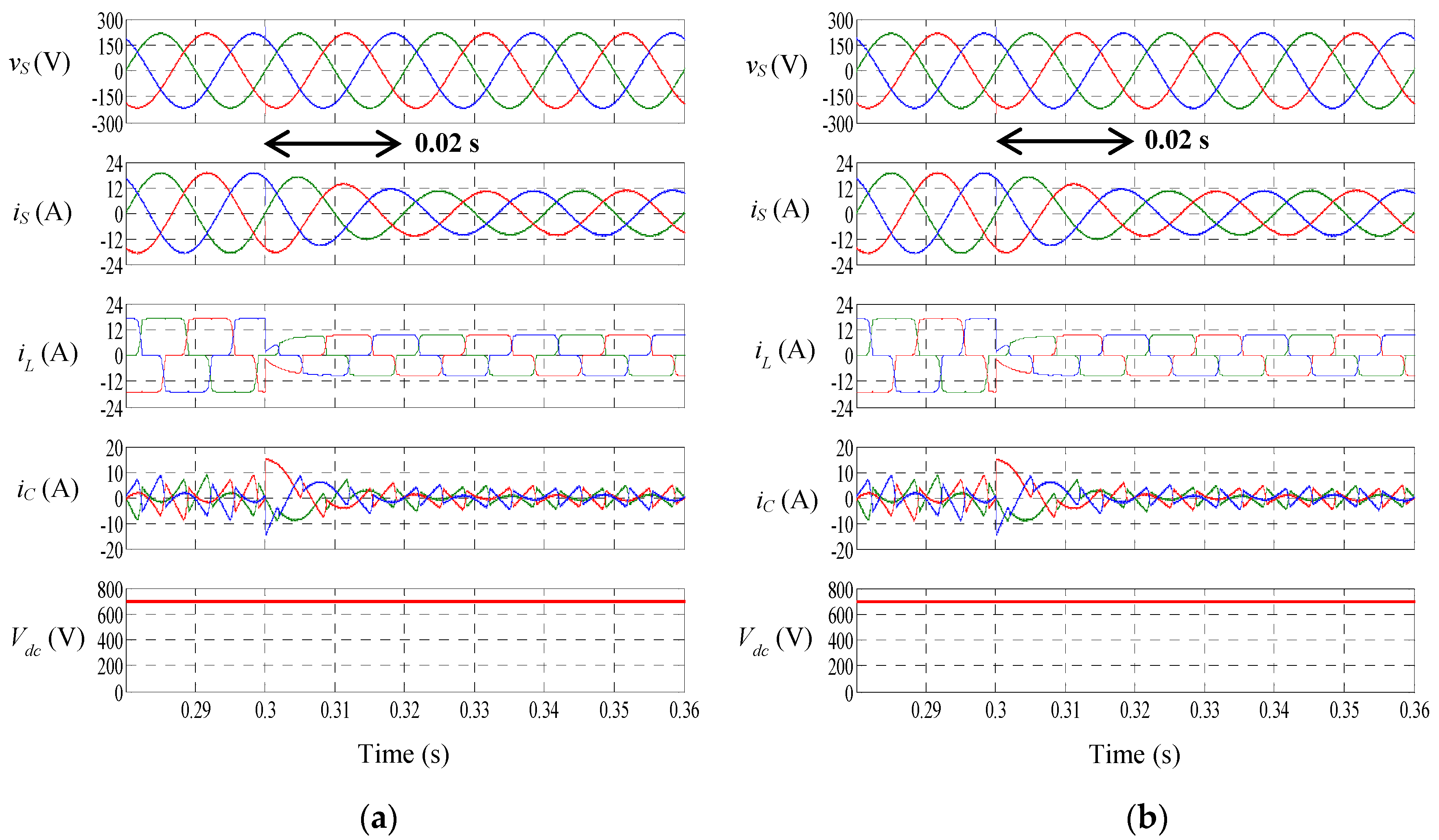
5. Simulation Results
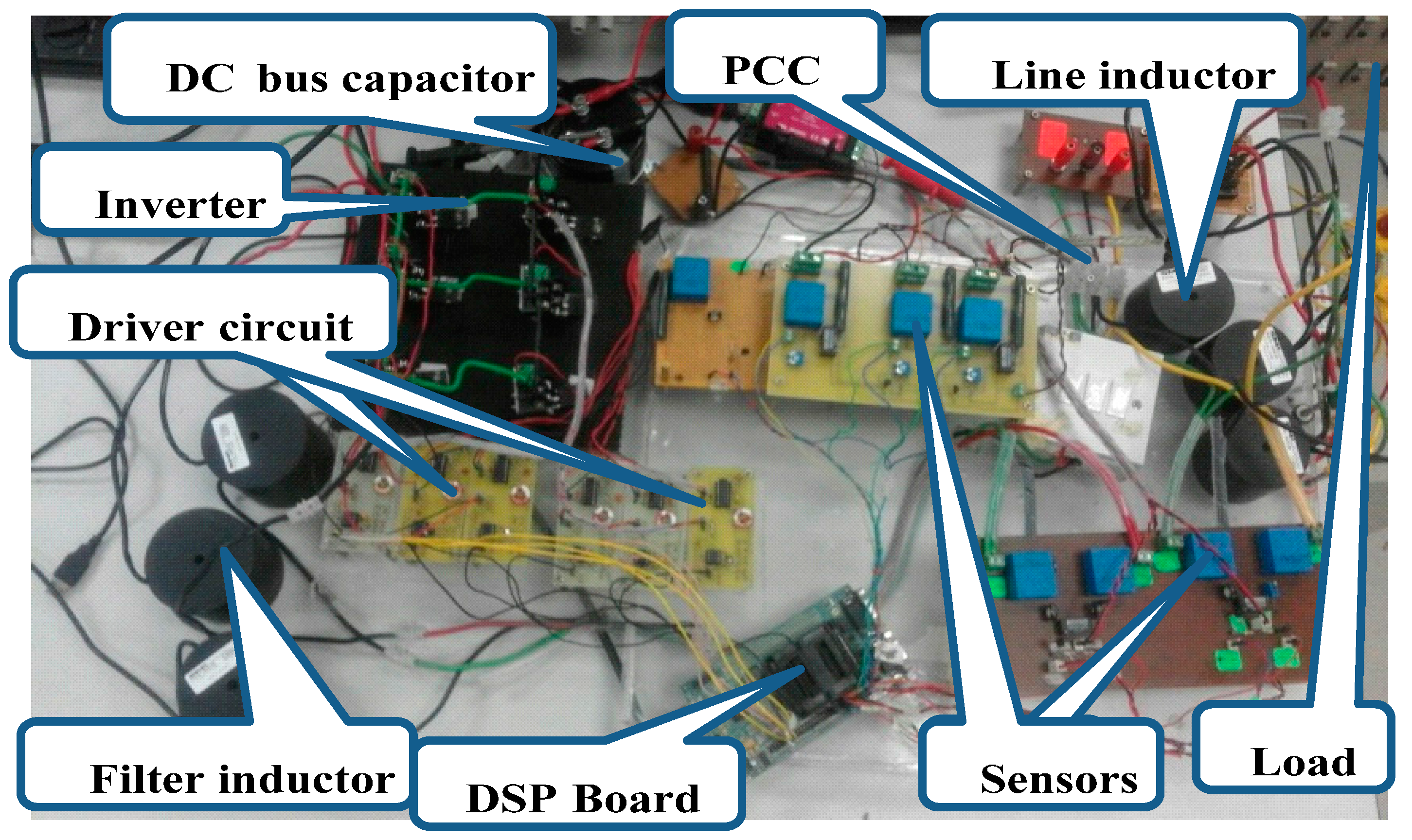
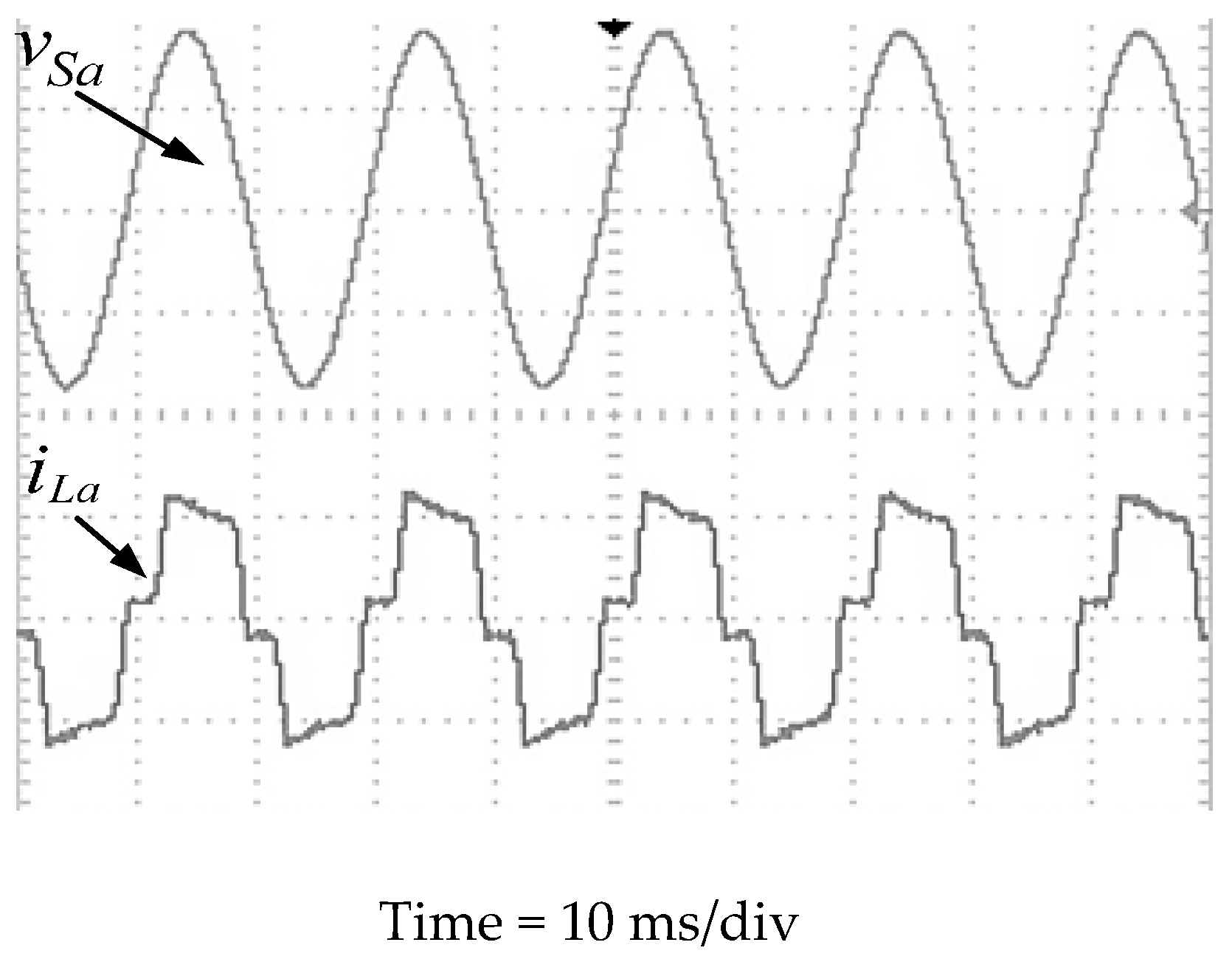
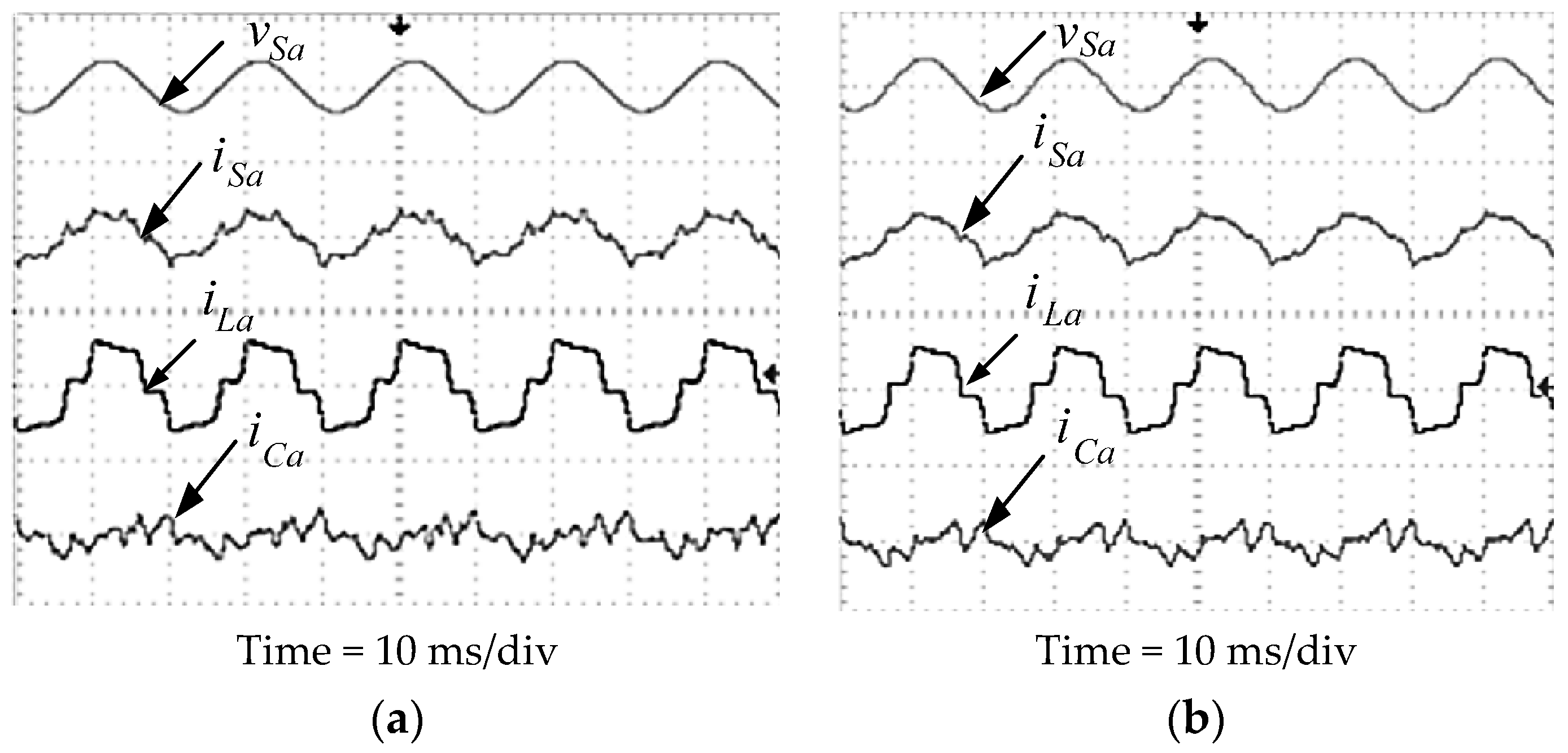
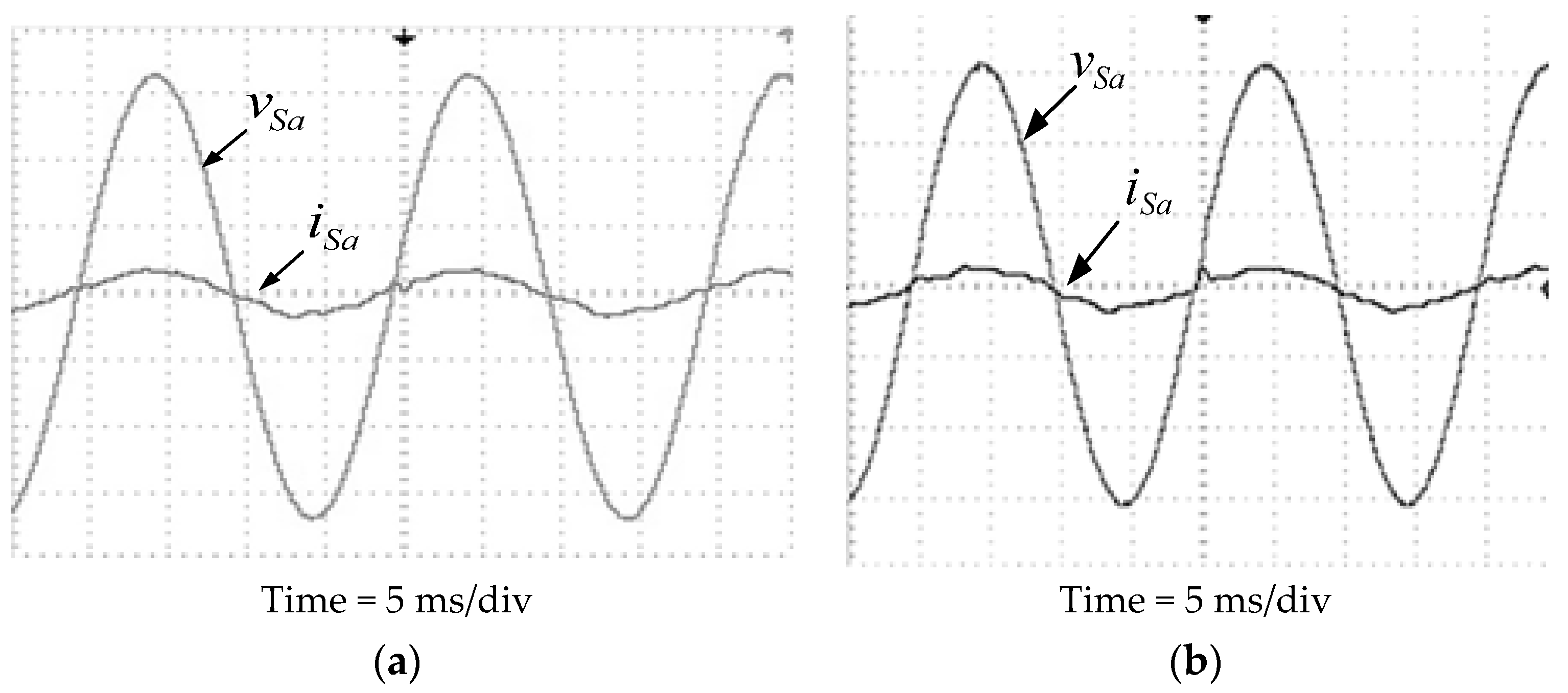
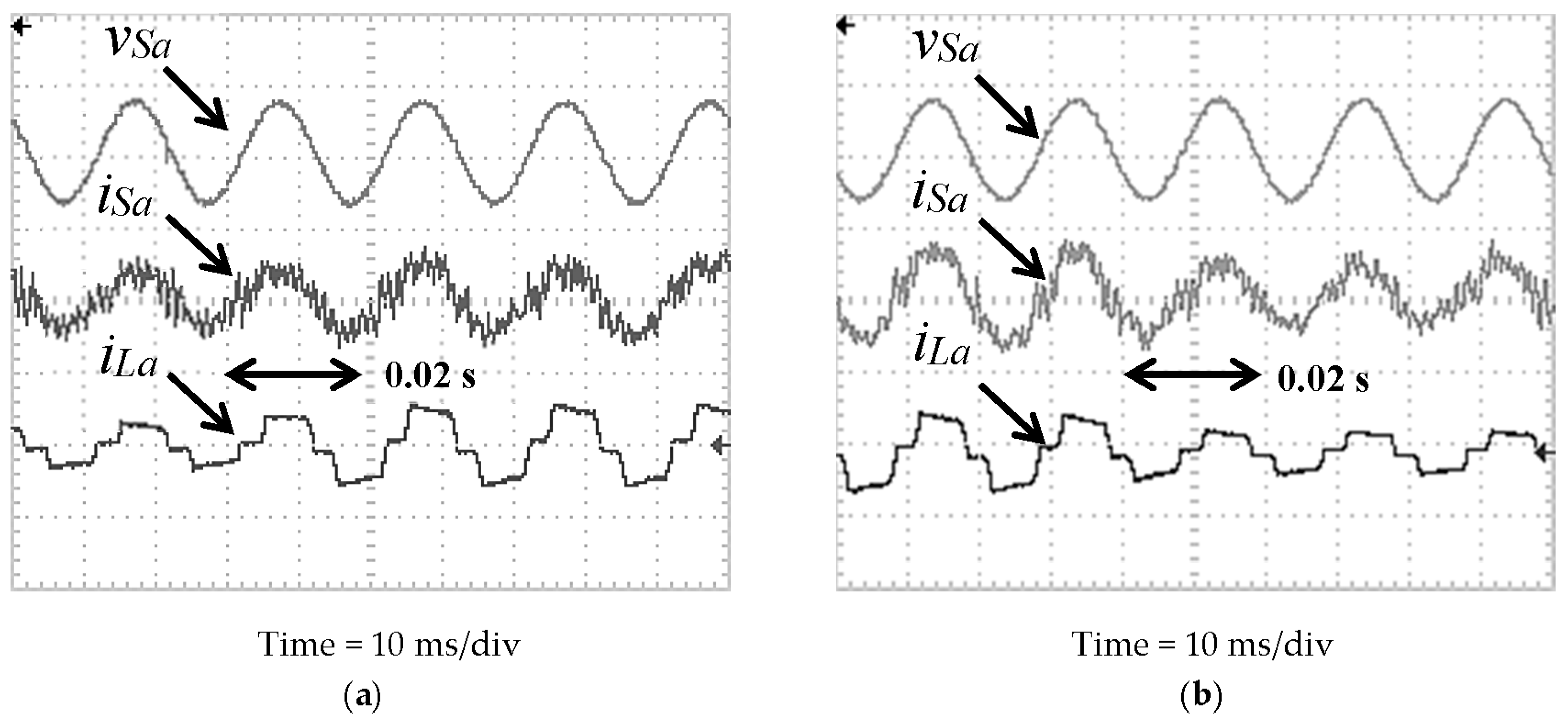
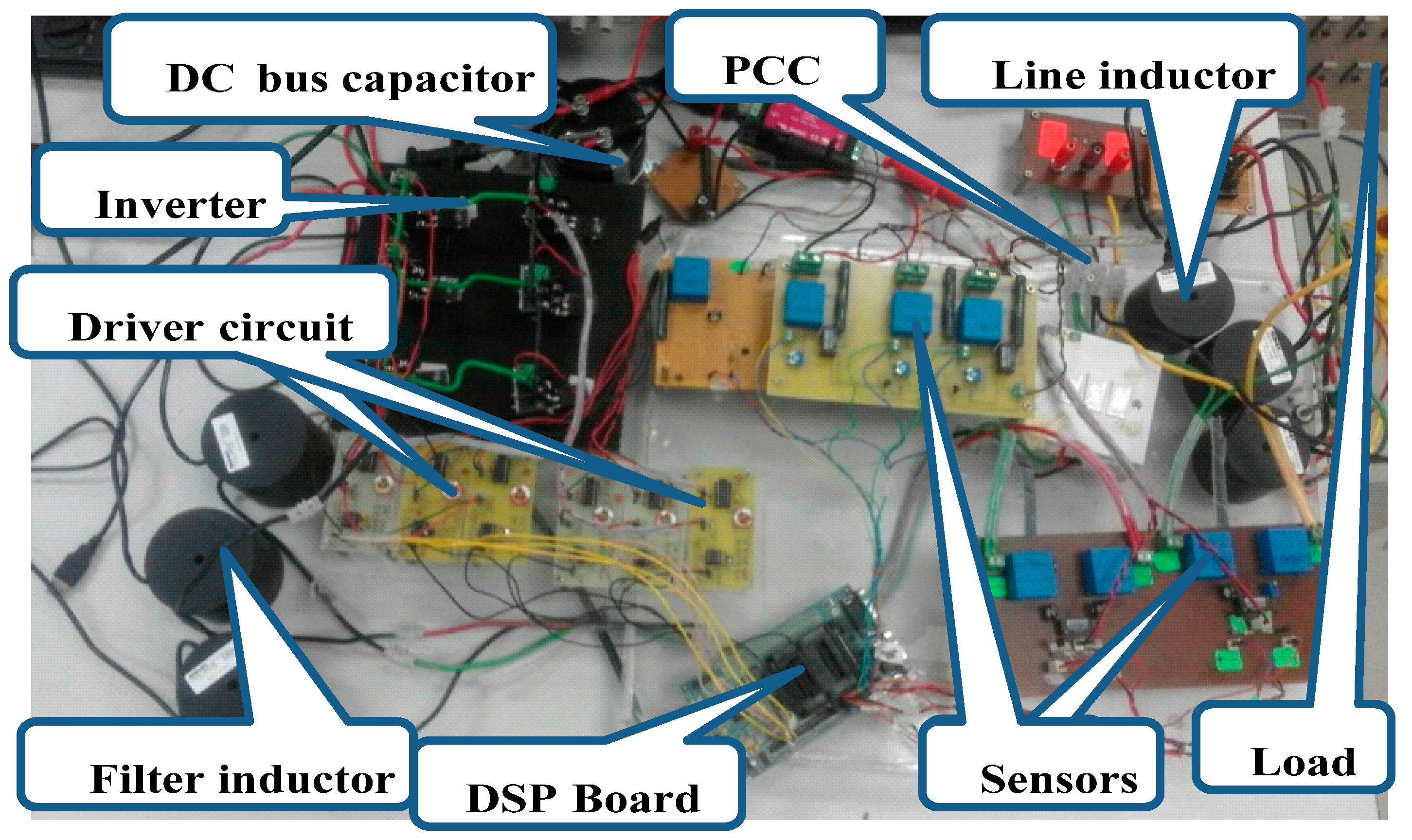
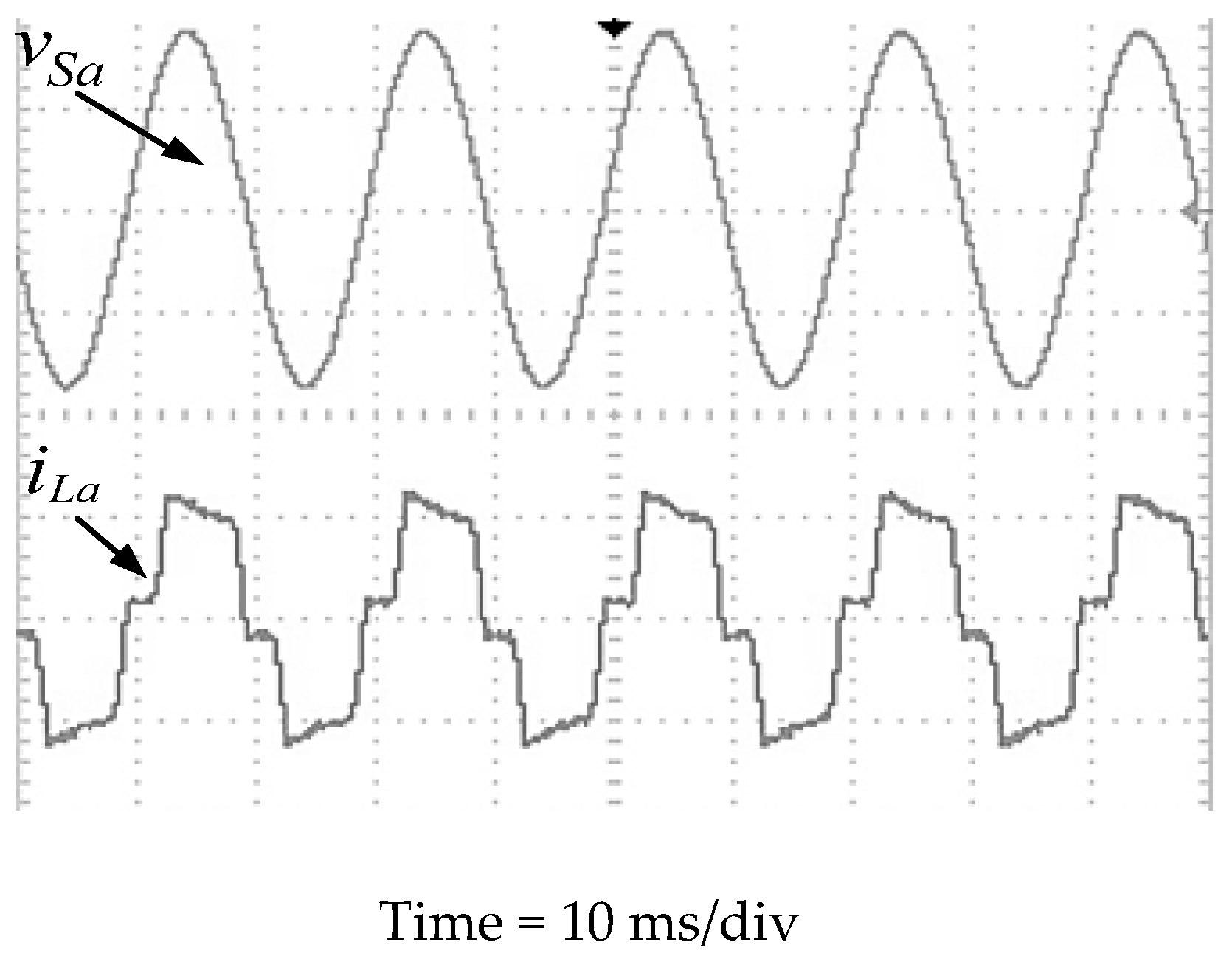
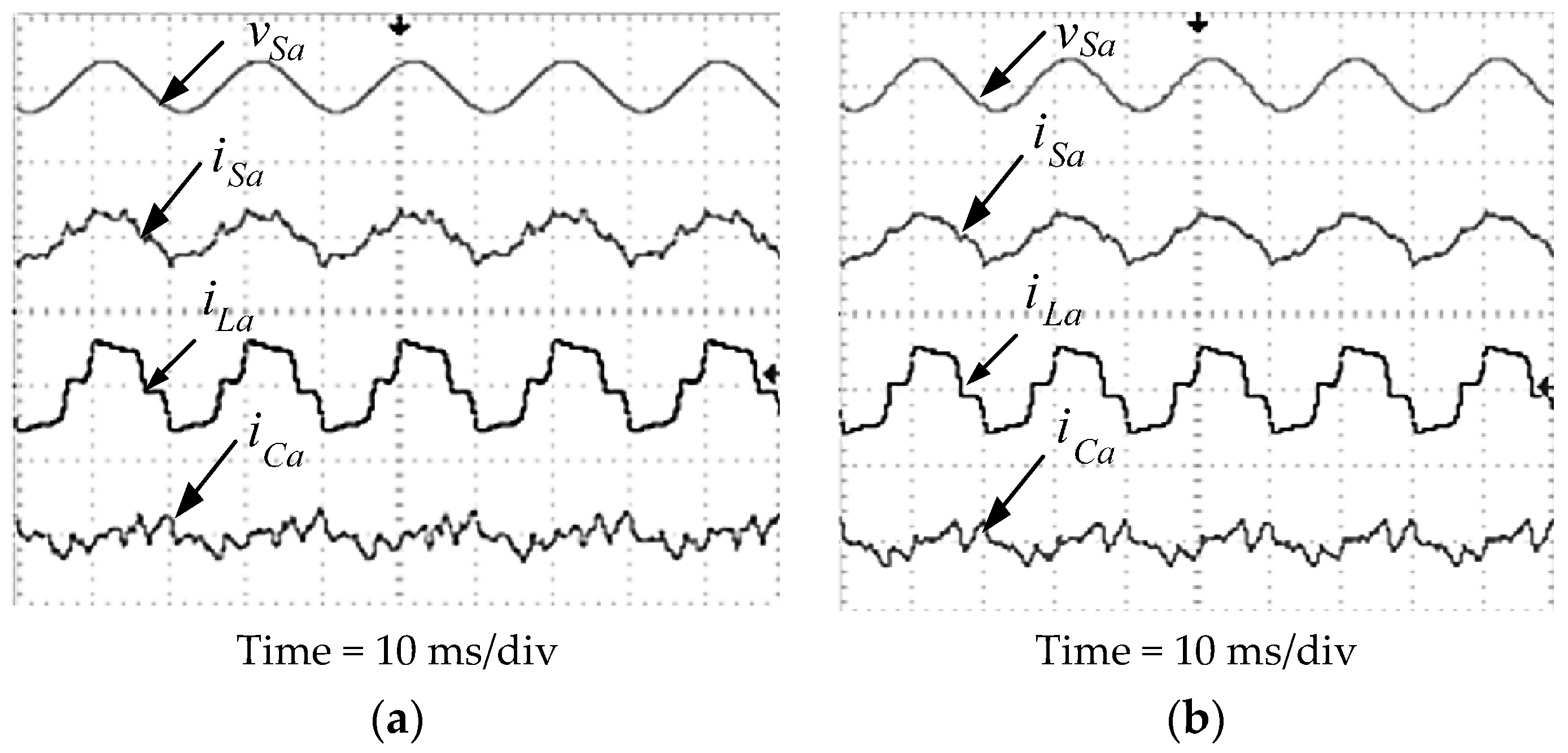
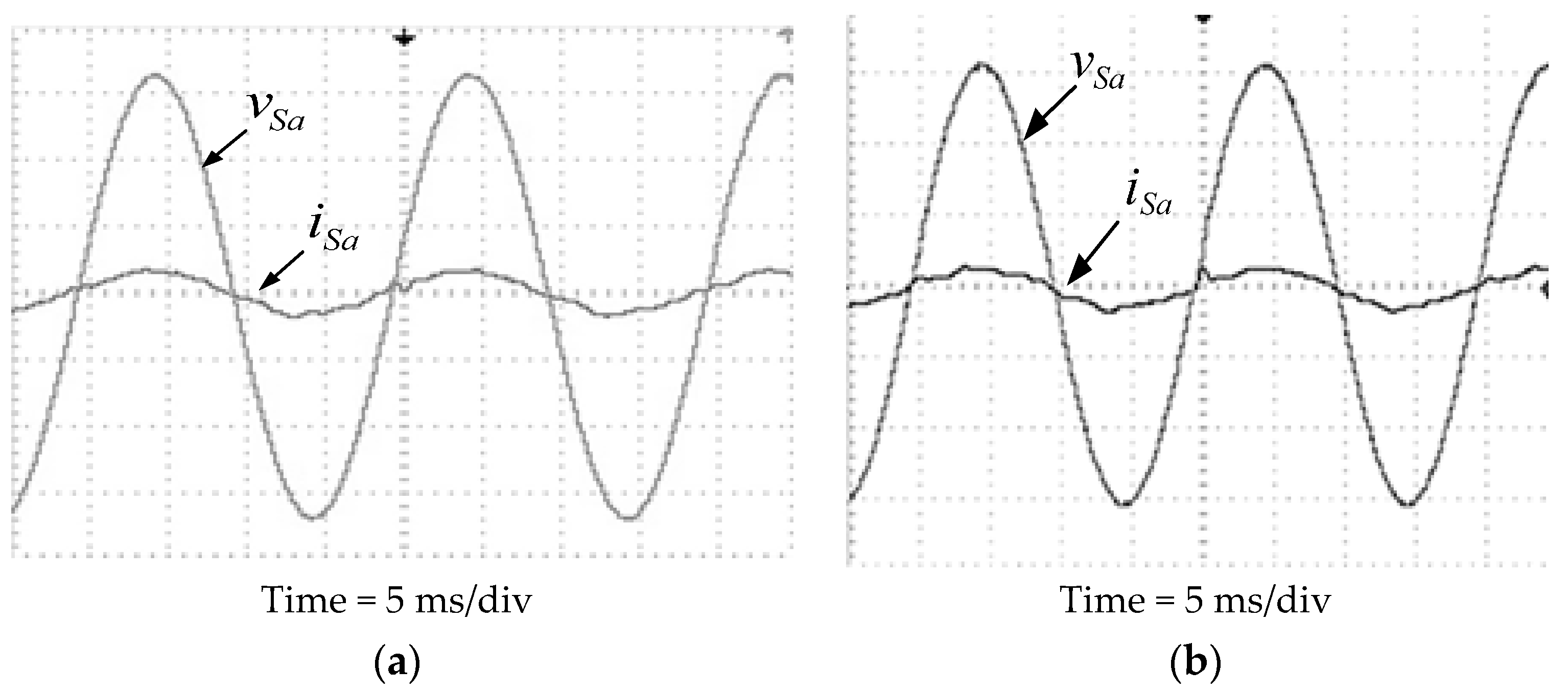
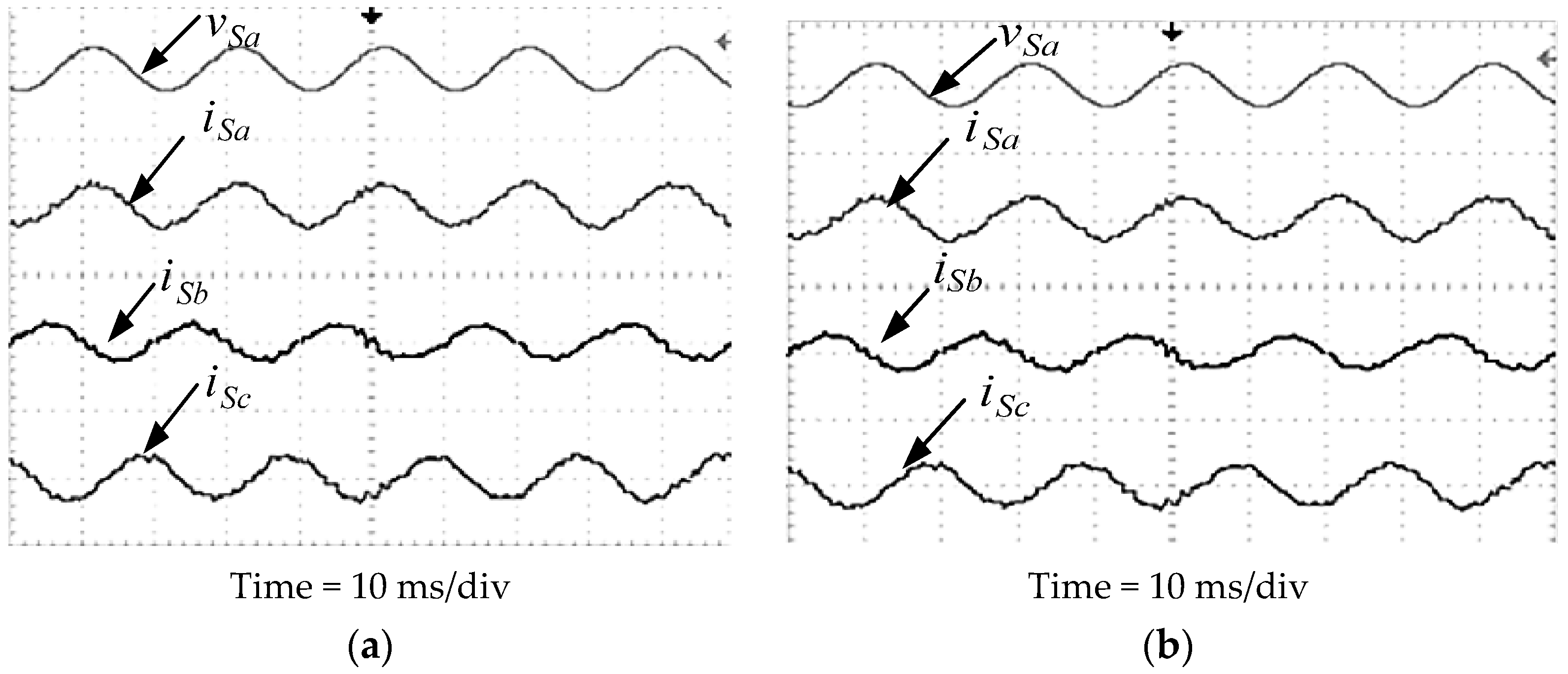
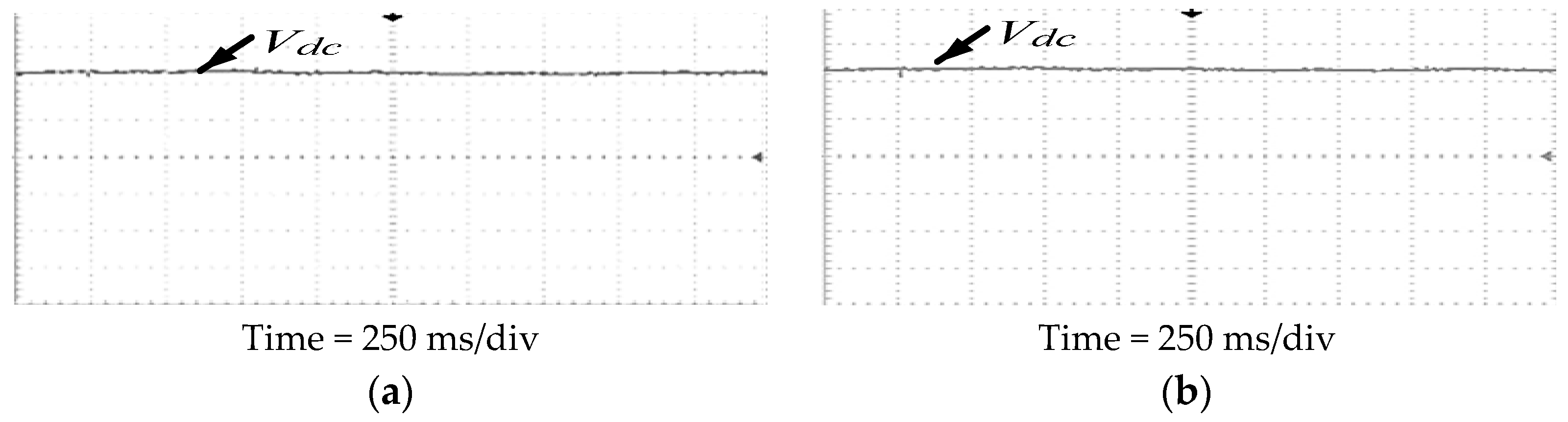
6. Experimental Verification
7. Conclusions
Author Contributions
Conflicts of Interest
References
- De Almeida, A.; Moreira, L.; Delgado, J. Power quality problems and new solutions. In Proceedings of the International Conference on Renewable Energy and Power Quality, Vigo, Spain, 9 November 2003. [Google Scholar]
- Acordi, E.J.; Silva, I.N.; Machado, R.Q.; Sapf, A.F. Application of fuzzy systems in the control of a shunt active power filter with four-leg topology. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 1239–1244. [Google Scholar]
- Singh, B.; Al-haddad, K.; Chandra, A. Power Quality Improvement. IEEE Trans. Ind. Electron. 1999, 46, 960–971. [Google Scholar] [CrossRef]
- Salam, Z.; Cheng, T.P.; Jusoh, A. Harmonics Mitigation Using Active Power Filter : A Technological Review. Elektr. J. Elektr. Eng. 2006, 8, 17–26. [Google Scholar]
- Teke, A.; Saribulut, L.; Meral, E.M.; Tümay, M. Active power filter: Review of converter topologies and control strategies. Gazi Univ. J. Sci. 2011, 24, 283–289. [Google Scholar]
- Hoon, Y.; Radzi, M.A.M.; Hassan, M.K.; Mailah, N.F. DC-Link Capacitor Voltage Regulation for Three-Phase Three-Level Inverter-Based Shunt Active Power Filter with Inverted Error Deviation Control. Energies 2016, 9, 533. [Google Scholar] [CrossRef]
- Boukadoum, A.; Bahi, T. Fuzzy Logic Controlled Shunt Active Power Filter for Harmonic Compensation and Power Quality Improvement. J. Eng. Sci. Technol. Rev. 2015, 7, 19–24. [Google Scholar]
- Mistry, D.A.; Dheeraj, B.; Gautam, R.; Meena, M.S.; Mikkili, S. Power Quality Improvement Using PI and Fuzzy Logic Controllers Based Shunt Active Filter. Int. J. Electr. Comput. Energy Electron. Commun. Eng. 2014, 8, 652–661. [Google Scholar]
- Kadivar, K.T. Application of Fuzzy Logic Controller in Shunt Active Power Filter. Int. J. 2016, 2, 596–600. [Google Scholar]
- Bayındır, K.Ç.; Cuma, M.U.; Tümay, M. Hierarchical neuro-fuzzy current control for a shunt active power filter. Neural Comput. Appl. 2006, 15, 223–238. [Google Scholar] [CrossRef]
- Hoon, Y.; Mohd, R.M.; Hassan, M.; Mailah, N. A Refined Self-Tuning Filter-Based Instantaneous Power Theory Algorithm for Indirect Current Controlled Three-Level Inverter-Based Shunt Active Power Filters under Non-sinusoidal Source Voltage Conditions. Energies 2017, 10, 277. [Google Scholar] [CrossRef]
- Kunde, S.S.; Tendulkar, S.; Gupta, S.P.; Kumar, G.; Mikkili, S. Fuzzy Logic Controller Based Shunt Active Filter with Different MFs for Current Harmonics Elimination. Int. J. Electr. Comput. Energy Electron. Commun. Eng. 2014, 8, 614–621. [Google Scholar]
- Kumar, V.P. APF for Harmonic Elimination of BLDC Drive. Int. J. Mag. Eng. Technol. Manag. Res. 2015, 2, 1594–1600. [Google Scholar]
- Bellatreche, H.; Bounekhla, M. Using Fuzzy Logic and Hysteresis Current Control to Reduce Harmonics in Three Level NPC Shunt Active Power Filter. In Proceedings of the 8th International Conference on Modelling, Identification and Control (ICMIC-2016), Algiers, Algeria, 15–17 November 2016; pp. 5–9. [Google Scholar]
- Jacob, A.; Abraham, B.T.; Prakash, N.; Philip, R. A Review of Active Power Filters in Power System Applications. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 10253–10261. [Google Scholar]
- Philip, R. Synchronous Reference Frame Detection and Hysteresis Control for Active Power Filters. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 12173–12178. [Google Scholar] [CrossRef]
- Kumar, P.A.; Patel, R. Adaptive hysteresis and fuzzy logic controlled based shunt active power filter resistant to shoot-through phenomenon. IET Power Electron. 2015, 8, 1963–1977. [Google Scholar]
- Kathalingam, S.; Karantharaj, P. Comparison of Multiple Carrier Disposition PWM Techniques Applied for Multi-Level Shunt Active Filter. J. Electr. Eng. 2012, 63, 261–265. [Google Scholar] [CrossRef]
- Li, H.; Zhuo, F.; Wang, Z.; Lei, W.; Wu, L. A novel time-domain current-detection algorithm for shunt active power filters. IEEE Trans. Power Syst. 2005, 20, 644–651. [Google Scholar] [CrossRef]
- Marques, G.D.; Pires, V.F.; Malinowski, M.; Kazmierkowski, M. An Improved Synchronous Reference Frame Method for Active Filters. In Proceedings of the EUROCON 2007—The International Conference on Computer as a Tool, Warsaw, Poland, 9–12 September 2007; pp. 2564–2569. [Google Scholar]
- Bhasha, S.M.; Lalitha, B. Comparison of Control Algorithms for Shunt Active Filter for Harmonic Mitigation. Int. J. Eng. Comput. Sci. 2014, 3, 8476–8481. [Google Scholar]
- Monfared, M.; Golestan, S.; Guerrero, J.M. A New Synchronous Reference Frame-Based Method for Single-Phase Shunt Active Power Filters. J. Power Electron. 2013, 13, 692–700. [Google Scholar] [CrossRef]
- Prasad, A.G.; Dheeraj, K.; Kumar, A.N. Comparison of Control Algorithms for Shunt Active Filter for Harmonic Mitigation. Int. J. Eng. Res. Technol. 2012, 1, 1–6. [Google Scholar]
- Rao, N.S.; Jayatheertha, H.J. Modeling and Simulation of Various Srf Methods for Shunt Active Power Filter and Application To. Int. J. Adv. Eng. Res. Stud. 2012, 1, 18–22. [Google Scholar]
- Li, X.; He, H.; Lu, J.; Liang, Z. Modified Synchronous Reference Frame Method for Active Power Filter under Asymmetric and Distorted Supply Voltages Condition. In Proceedings of the 2015 International Conference on Industrial Informatics-Computing Technology, Intelligent Technology, Industrial Information Integration, Wuhan, China, 3–4 December 2015; pp. 1–5. [Google Scholar]
- Gayathri, Y.; Reddy, K.H.; Anupama, S. Simulation of SRF Control Based Shunt Active Power Filter and Application to BLDC Drive. Int. J. Comput. Sci. Inf. Secur. 2014, 12, 6–12. [Google Scholar]
- Babu, G.M. Simulation Study of Indirect Current Control Technique for Shunt Active Filter. Int. J. Eng. Res. Appl. 2013, 3, 831–851. [Google Scholar]
- Tian-yuan, T.; Qi-rong, J.; Gang, L.; Yu-xiang, L. Comparison of Direct and Indirect Current Control Strategy for DSTATCOM. In Proceedings of the International Conference on Power System Technology, Chongqing, China, 22–26 October 2006; pp. 1–8. [Google Scholar]
- Patjoshi, R.K.; Mahapatra, K.K. Performance Comparison of Direct and Indirect Current Control Techniques Applied to a Sliding Mode Based Shunt Active Power Filter. In Proceedings of the Annual IEEE India Conference (INDICON), Mumbai, India, 13–15 Decmber 2013; pp. 1–5. [Google Scholar]
- Sahu, I.; Gadanayak, D.A. Comparison between Two Types of Current Control Techniques Applied to Shunt Active Power Filters and Development of a Novel Fuzzy Logic Controller to Improve SAPF Performance. Int. J. Eng. Res. Dev. 2012, 2, 1–10. [Google Scholar]
- Sakthivel, A.; Vijayakumar, P.; Senthilkumar, A. Performance Assessment of Direct and Indirect Current Control Strategies for Shunt Active Power Filter. J. Eng. Appl. Sci. 2015, 10, 4243–4250. [Google Scholar]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortes, P.; Ammann, U. Predictive Current Control of a Voltage Source Inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Ali, O.A.M.; Ali, A.Y.; Sumait, B.S. Comparison between the Effects of Different Types of Membership Functions on Fuzzy Logic Controller Performance. Int. J. Emerg. Eng. Res. Technol. 2015, 3, 76–83. [Google Scholar]
- Saribulut, L.; Teke, A.; Tümay, M. Artificial neural network-based discrete-fuzzy logic controlled active power filter. IET Power Electron. 2014, 7, 1536–1546. [Google Scholar] [CrossRef]
- Ma, K.; Juntao, F. Model reference adaptive fuzzy control of a shunt active power filter. J. Intell. Fuzzy Syst. 2015, 28, 485–494. [Google Scholar]
- Belaidi, R.; Haddouche, A.; Guendouz, H. Fuzzy logic controller based three-phase shunt active power filterfor compensating harmonics and reactive power under unbalanced mains voltages. Energy Procedia 2012, 18, 560–570. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Change in Error (ce) | Error (e) | ||
|---|---|---|---|
| N | Z | P | |
| N | N | LN | Z |
| Z | LN | Z | LP |
| P | Z | LP | P |
| System Parameters | Values |
|---|---|
| Supply frequency | 50 Hz |
| Supply voltage/Phase (peak value) | 220 V |
| Source impedance (RS, LS) | 0.15 Ω, 0.03 mH |
| Line impedance (Rr, Lr) | 1 Ω, 1 mH |
| Load impedance (RL, LL) | 40 Ω, 2 mH |
| Filter inductance | 3 mH |
| DC voltage | 700 V |
| Capacitance (Cdc) | 3000 μF |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Musa, S.; Radzi, M.A.M.; Hizam, H.; Wahab, N.I.A.; Hoon, Y.; Zainuri, M.A.A.M. Modified Synchronous Reference Frame Based Shunt Active Power Filter with Fuzzy Logic Control Pulse Width Modulation Inverter. Energies 2017, 10, 758. https://doi.org/10.3390/en10060758
Musa S, Radzi MAM, Hizam H, Wahab NIA, Hoon Y, Zainuri MAAM. Modified Synchronous Reference Frame Based Shunt Active Power Filter with Fuzzy Logic Control Pulse Width Modulation Inverter. Energies. 2017; 10(6):758. https://doi.org/10.3390/en10060758
Chicago/Turabian StyleMusa, Suleiman, Mohd Amran Mohd Radzi, Hashim Hizam, Noor Izzri Abdul Wahab, Yap Hoon, and Muhammad Ammirrul Atiqi Mohd Zainuri. 2017. "Modified Synchronous Reference Frame Based Shunt Active Power Filter with Fuzzy Logic Control Pulse Width Modulation Inverter" Energies 10, no. 6: 758. https://doi.org/10.3390/en10060758
APA StyleMusa, S., Radzi, M. A. M., Hizam, H., Wahab, N. I. A., Hoon, Y., & Zainuri, M. A. A. M. (2017). Modified Synchronous Reference Frame Based Shunt Active Power Filter with Fuzzy Logic Control Pulse Width Modulation Inverter. Energies, 10(6), 758. https://doi.org/10.3390/en10060758