1. Introduction
Electromechanical oscillations are inherent in large inter-connected power systems between regions [
1]. With the expansion of the system scale and increase in transmission power, electromechanical oscillation damping for inter-area mode is decreasing constantly, which causes electromechanical oscillations in power systems to become more serious.
At present, power oscillation damping (POD) for large interconnected power grids has been widely studied, and scholars have proposed numerous improvement approaches. Several means of enhancing the control capability of POD are available. Schemes reported in the literature can be divided into two categories. The first category includes methods that use additional equipment, such as flexible AC transmission systems and high-voltage DC devices, which are becoming practical approaches [
2,
3,
4,
5]. However, these schemes require additional equipment. Meanwhile, the second category involves techniques that modify conventional control schemes [
6,
7,
8]. In power systems, damping capability can be improved by way of the first category; however, these approaches increase in cost and complexity. Therefore, control strategies that do not require additional devices are worth studying. A traditional POD controller such as a power system stabilizer (PSS) controller, which has a simple structure and is easy to apply, is designed on the determination model and linear control theory. To enhance damping in power systems, a PSS can be designed on linear matrix inequality [
9,
10] and H
∞ [
11]. However, a multi-generator power system is a representative time-varying dynamic system which exhibits parametric uncertainties and is strongly nonlinear. The operating conditions of such systems change constantly, and thus a conventional PSS controller cannot satisfy system requirements.
The linear system control method is based on an accurate model and does not exhibit robustness with the parameters. To compensate for its shortcomings, nonlinear theory is applied to develop a POD controller. The backstepping approach is designed on the Lyapunov nonlinear method; its control function and Lyapunov function can be flexible in selection. This ensures the gradual stability of the disturbance nonlinear system; therefore, this method has been widely used in nonlinear system control [
12,
13]. However, this method has poor effects on the discontinuous disturbance of the system and nonlinear parameter perturbation.
In recent years, fractional order control has been applied in power systems [
14,
15,
16]. Its main characteristics are high control precision and ease of application. Fractional order sliding mode variable structure control theory (FSMC) has nothing to do with parameter and disturbance. This method has the advantages of fast response speed, robustness, simple structure [
17,
18,
19]. Compared to the integer order, fractional order control has higher control precision, and the system can be more accurately modeled, but this method requires pseudo-linear processing of the original system model. In this paper, the controller was designed based on combining the advantages of the backstepping method and FSMC theory.
The sliding mode control method is more effective for linear parts of systems, but it has difficulty in dealing with nonlinear parts. Multi-generator power systems are complex and stochastic multi-variable nonlinear systems. As stated earlier, designing a controller by traditional methods is difficult, as such controllers are greatly affected by disturbances and uncertainty factors. To compensate for the shortcomings of the linear system control method and the traditional nonlinear control method, extended state observer (ESO) is applied in power systems [
20,
21,
22,
23,
24]. A combination of FSMC, backstepping, and ESO can obtain a very good damping control effect for nonlinear systems.
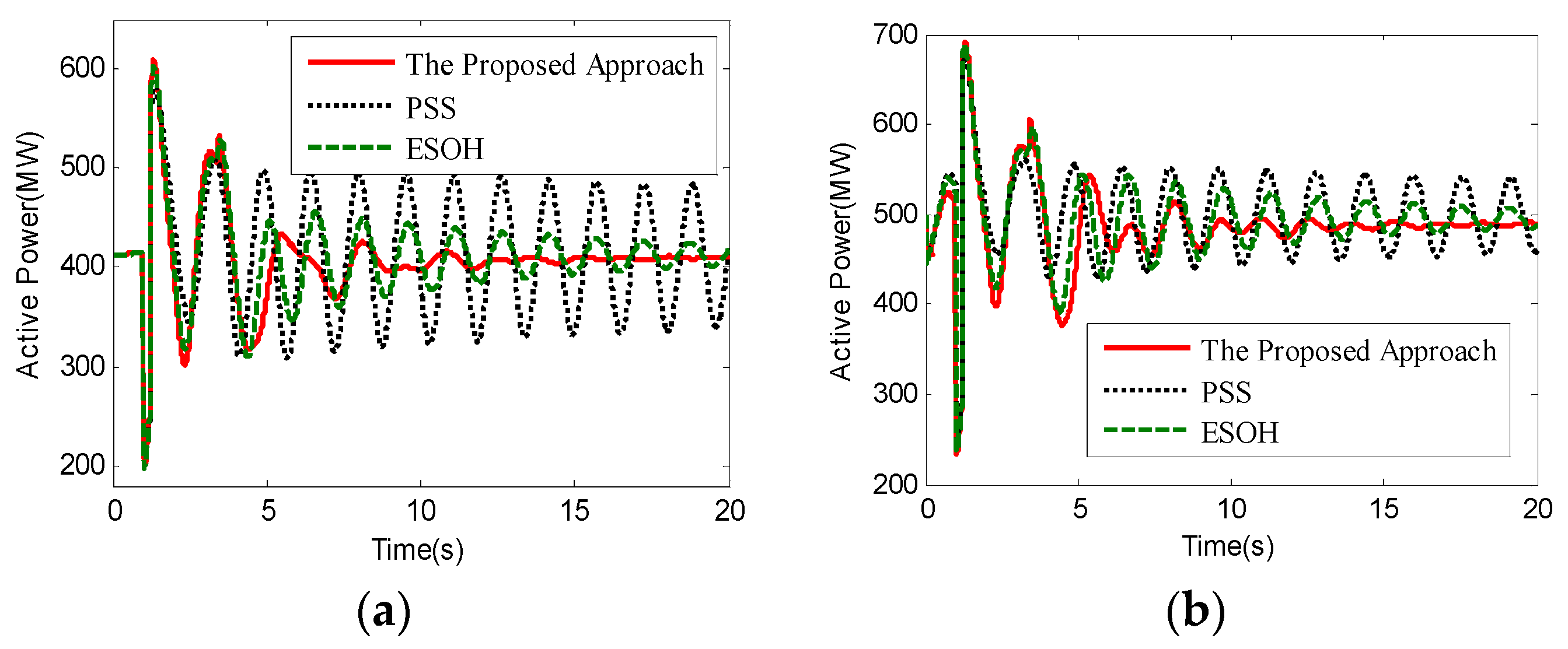
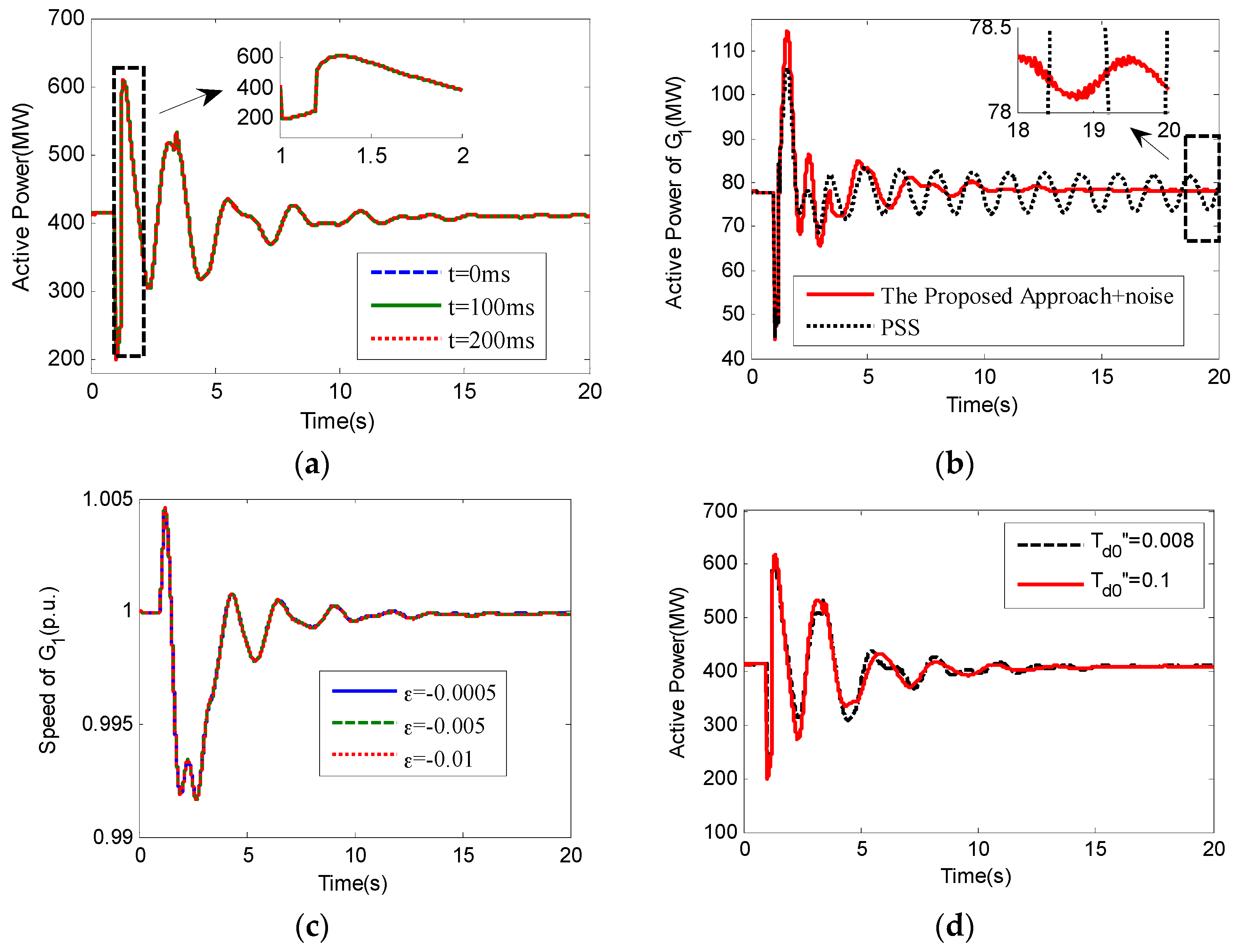
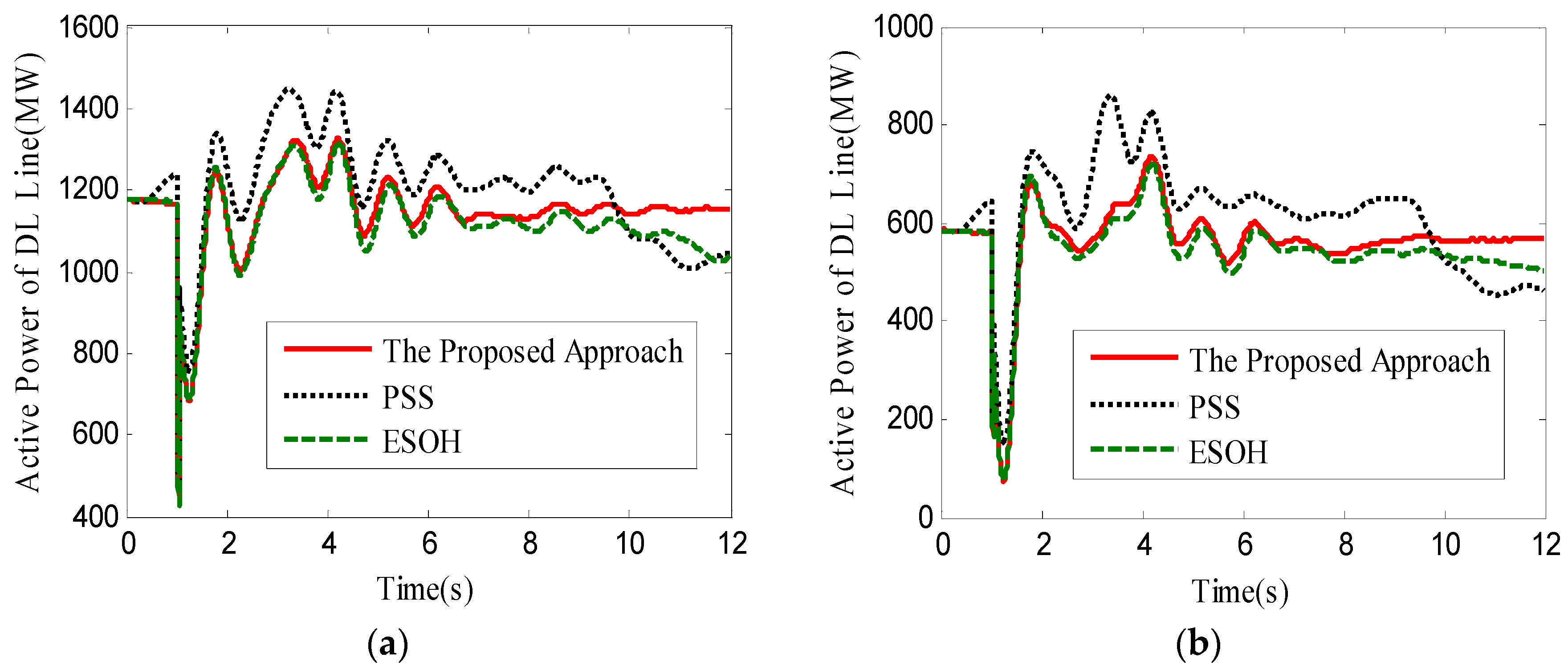
To improve the properties of a POD controller, a novel nonlinear ESO-backstepping fractional order SMC (EBFSMC) approach was introduced to design the control law for such controllers. ESO is used to estimate model error and uncertain external disturbance, and eliminate them by feedback. The controller, with feedback based on ESO, was easily designed using the backstepping fractional order SMC (BFSMC) method. The proposed algorithm compensates for the deficiency of the traditional method. The simulation results showed that the method is simple and effective. The POD controller exhibited stronger robustness as well as superior static and dynamic performances compared to the PSS control technique.
The remaining parts of the article are organized as follows. The mathematical model of the system through the differential homeomorphic mapping can be transformed into the Brunovsky standard. Dynamic behavior of multi-machine power systems is discussed in
Section 2.
Section 3 briefly describes ESO and BFSMC. The EBFSMC scheme is proposed, designed, and analyzed in
Section 4.
Section 5 explains the self-adaptive wide-area damping control method and control flow. In
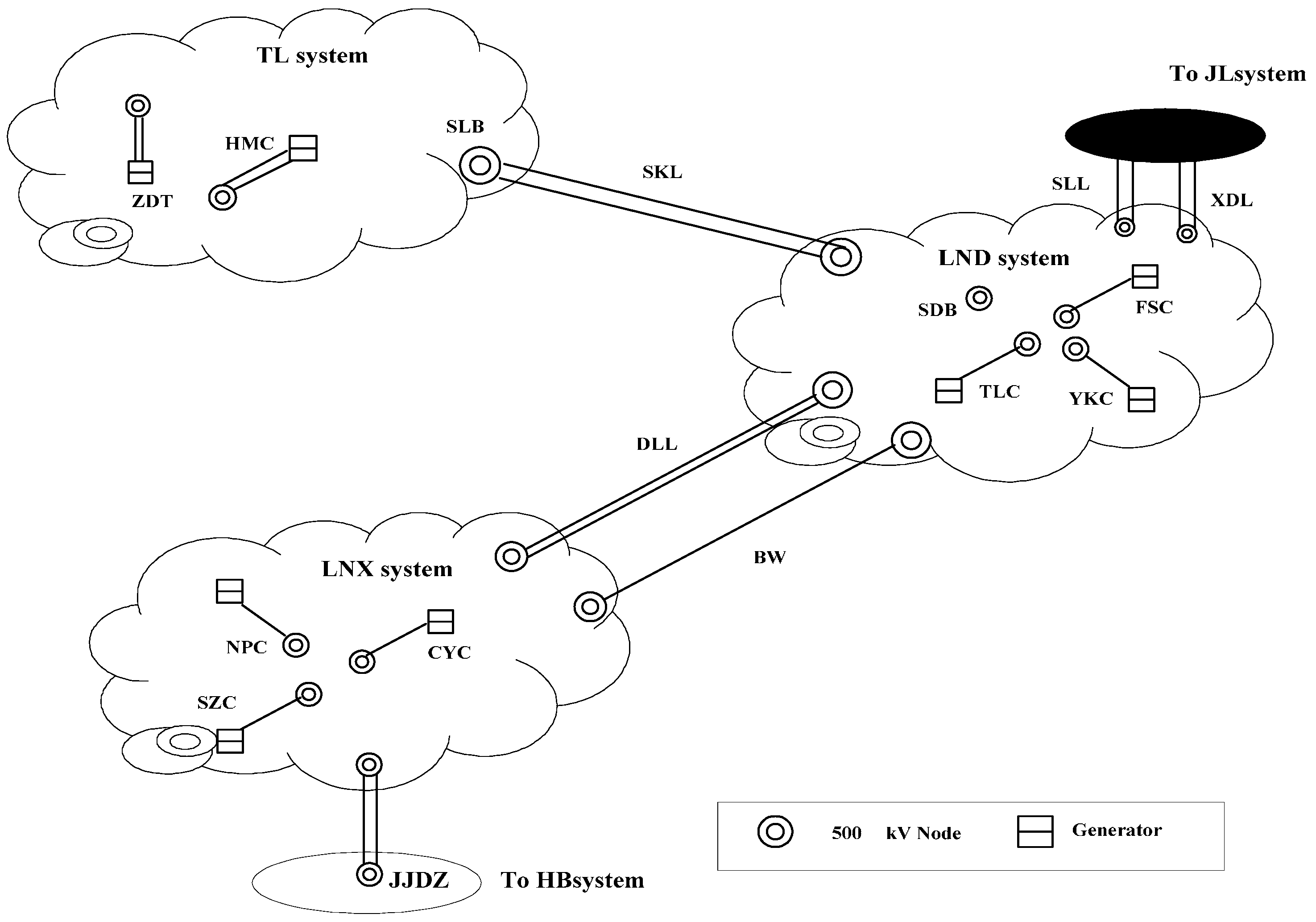
Section 6, the effectiveness and robustness of the adaptive wide-area damping control method are verified via test systems. Finally, the conclusions of the study are provided in
Section 7.
2. Mathematical Modeling of Multi-Machine Power Systems
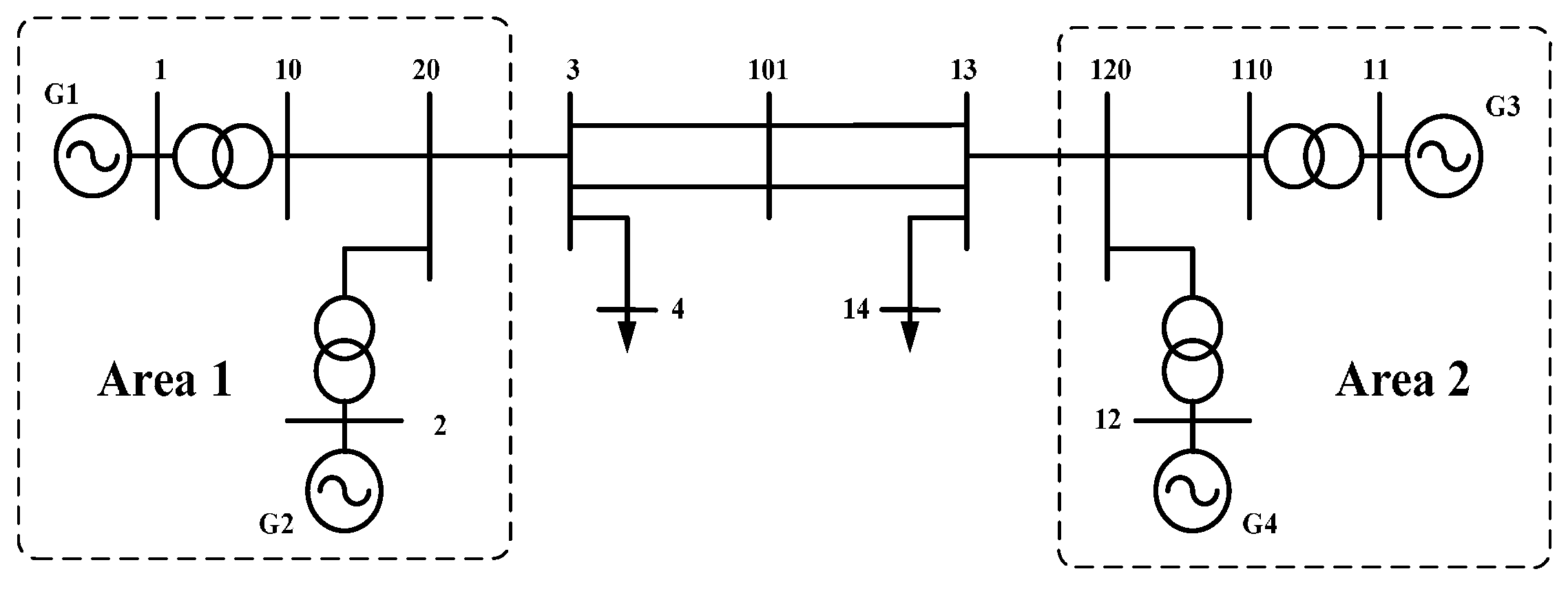
Interconnected multi-machine systems are composed of
n generators. In [
1], the seventh-order model of a generator containing excitation control was presented as follows:
where subscript
i of variables and parameters indicate the number of generators,
i = 1, 2, ...,
n.
Pei is the electromagnetic power of the
ith generator (p.u.);
ω0 is the synchronous angular velocity;
ωi is the electrical angular velocity of the generator;
Pm is the mechanical power;
Ti is the inertia time constant of the generator;
Di is the damping coefficient;
δi is the rotor angle of the generator;
δ0 is the synchronous rotor angle of the generator;
Idi and
Iqi are the
d-axis and
q-axis stator current of the
ith generator, respectively;
and
are the
d-axis and
q-axis subtransient electric potential, respectively;
and
are the
d-axis and
q-axis transient electric potential, respectively;
and
are the
d-axis and
q-axis subtransient reactance, respectively;
x’
di and
x’
qi are the
d-axis and
q-axis transient reactance, respectively;
and
are the
d-axis and
q-axis open-circuit subtransient time constant, respectively;
and
are the
d-axis and
q-axis open-circuit transient time constant, respectively;
Efi is the excitation electric potential;
Te and
KA are the time delay and control gain in excitation control, respectively;
Vref and
V are the reference and actual voltage;
Vpss is the reference voltage of the PSS damping control input.
Pei and
Idqi can be respectively expressed as follows:
where
xdqi are the
d-axis and
q-axis synchronous reactance of the
ith generator, respectively;
δij is a relative angle of the
ith and
jth generators;
Gii and
Bii are the auto-admittance and auto-conductance of the
ith generator, respectively;
Gij and
Bij are the mutual-admittance and auto-conductance of the
ith and
jth generators, respectively.
Through differential homeomorphic mapping [
25], the model of generators can be transformed into Equation (2) through coordinate transformation.
Then, as per precise linearization knowledge, Equation (2) can be derived as follows:
where
, expression of
,
,
are detailed in
Appendix A.
As shown in the above derivation, different order model of the generators can be written in general formula form in the following:
where the
x is the
ith state variables, and
u is the control input. Equation (7) can provide a model for the follow-on controller designation.
4. Proposed BFSMC POD Controller Based on ESO
The principle of the new damping controller—which can be used in interconnected power systems—is presented in the following paragraphs.
In FSMC design, the FSMC law and switching function are mainly considered [
17].
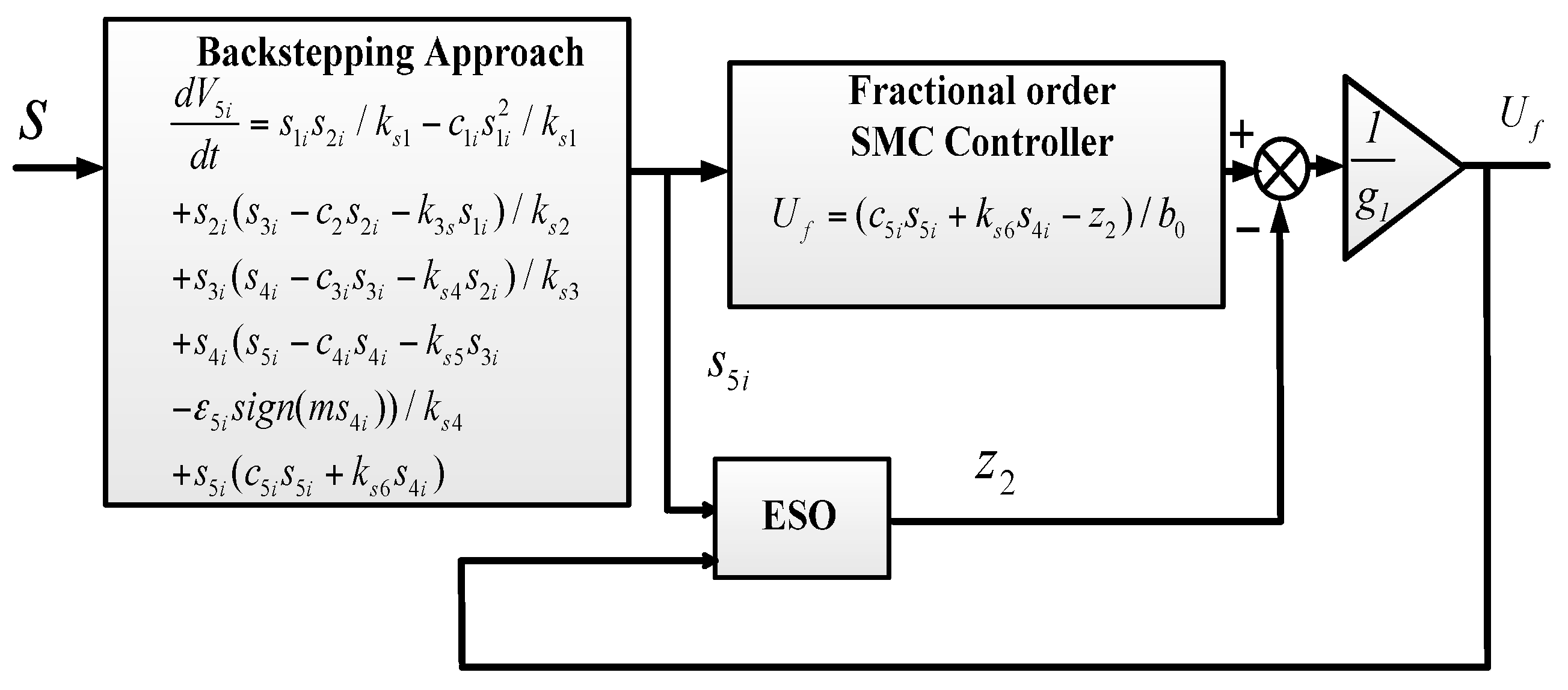
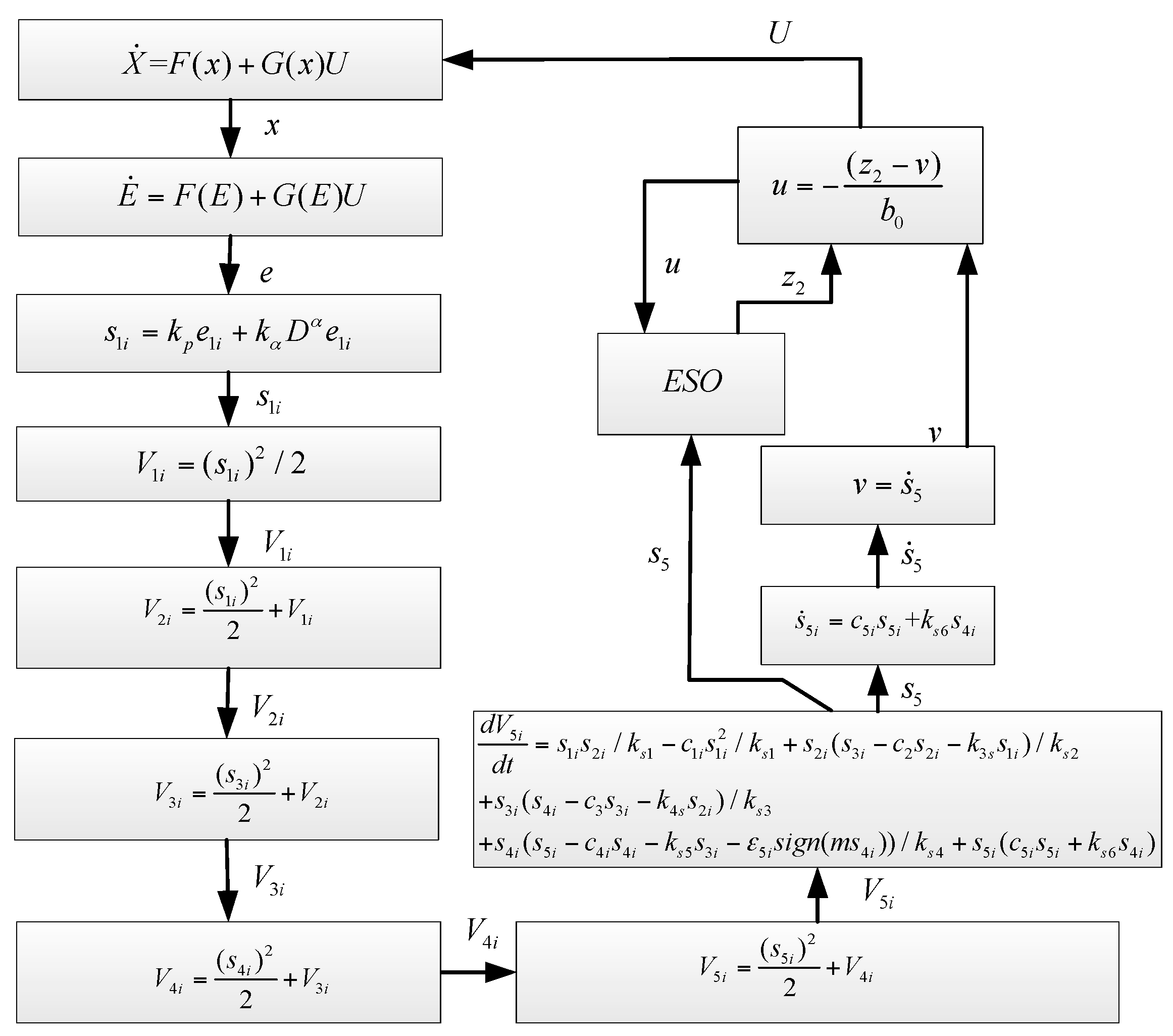
Figure 1 shows the control structure of the EFSMC applied in the damping controller.
Based on Equation (1), variations and Vpss can be defined as state and input variations, respectively.
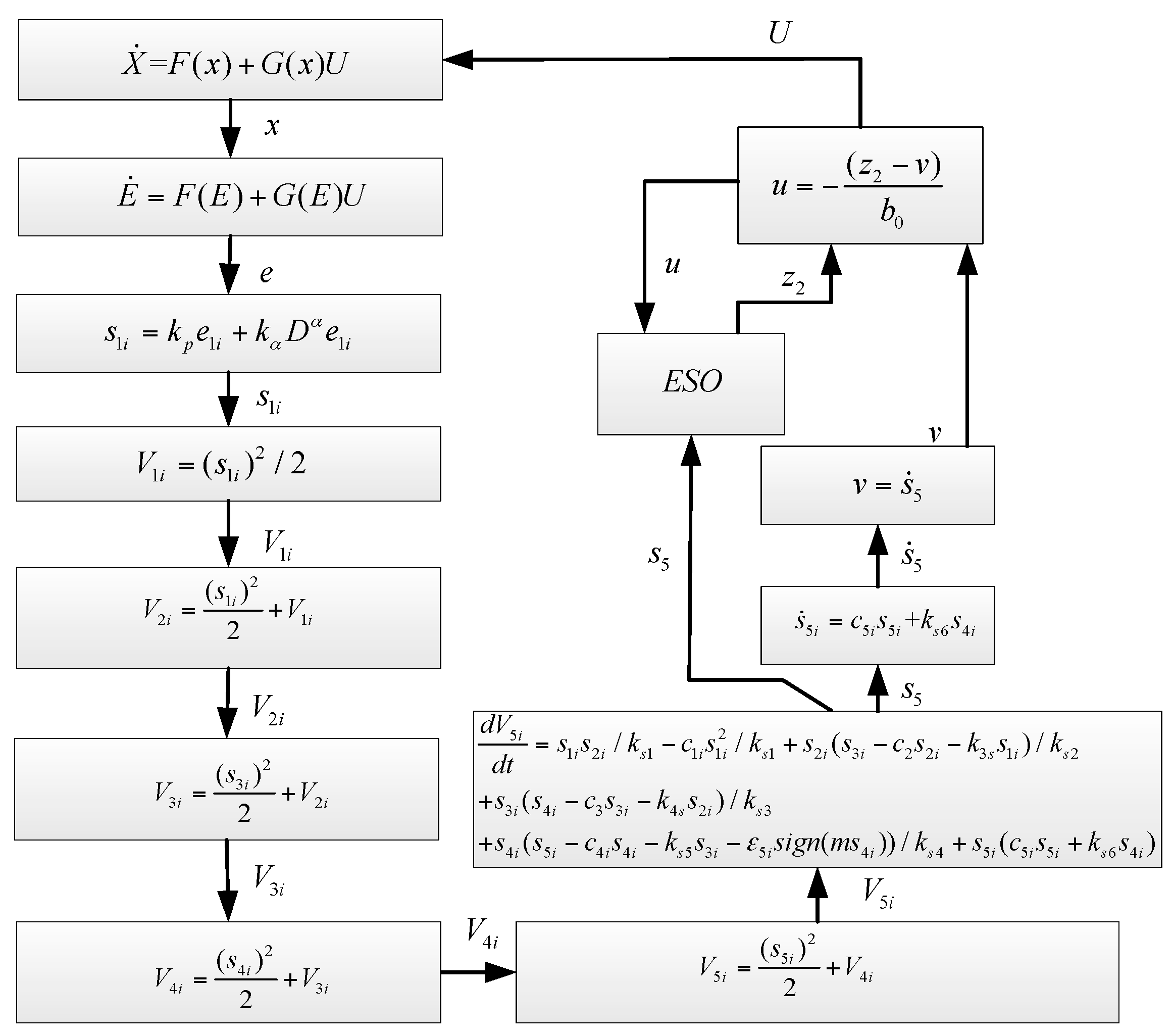
The specific design is as follows.
Step 1: Constructing the sliding surface and backstepping approach. If the tracking value of the state variables is
xref, then the tracking error is presented as follows:
The definition of the sliding mode surface formula is as follows:
The Lyapunov function is defined as Equation (19):
By deriving Equation (19), we can obtain
Then, Equation (21) is added into Equation (20), which yields
Then, Equation (23) is added into Equation (22), which yields
The Lyapunov function is defined as Equation (25):
By deriving Equation (25), we can obtain
Then, Equation (27) is added into Equation (26), which yields
As per Equation (28) and Equation (29), it is
The Lyapunov function is defined as Equation (31):
By deriving Equation (31), we can obtain
As per Equations (24), (26), (32), and (33), it is
The Lyapunov function is defined as Equation (37):
By deriving Equation (37), we can obtain
As per Equations (36), (38), and (39), it is
The Lyapunov function is defined as Equation (43):
By deriving Equation (43), we can obtain
As per Equations (44) and (45), it is
If ks1, ks2, ks3, ks4, ks5, ks6 and c1i, c2i, c3i, c4i, c5i are negative, would keep negative definite, and the control strategy could guarantee the stability of the controlled system.
Step 2: Designing ESO. Given that pre-control variable contains many parameters and system state variables, ESO is introduced to simplify these components.
The pre-control variable is presented as follows:
where
Uf is
Vpss.
is the pre-control variables and the derivation process is detailed in
Appendix B. The expression of
will be introduced further in Step 3.
Regarding the first-order state equation (i.e., Equation (47)), the structure of the second-order extended state observer is used to estimate
a and
b, which contains many parameters and state variables. The corresponding formula is expressed as follows:
where
is used to estimate variable
; and
is an extended variable which is used to estimate variable
. In addition,
is observable. The
fe function is a continuous power law function with a linear segment near the origin. It avoids the high-frequency chattering phenomenon. Uncertain factors can be dynamically compensated by
.
are adjustable parameters.
The nonlinear function is defined as follows:
where
e,
α, and
δ are the control parameters; and
sign is the symbol function.
δ > 0, 0 <
α < 1 are an important property of the function.
Step 3: Selection of BFSMC Law. For Equation (47) after ESO feedback, if the estimation error of ESO is not considered, we can approximate the formula of the system as follows:
where the estimated variant
b is the coefficient of the control variable.
Uf is
before the estimation.
As shown in Equation (48), the function of ESO is to redistribute the variable on the right side of Equation (48), which can cause the original control variables with the variable coefficient in ESO to transform into a linear combination of the variable and constant coefficient.
Thereby, the system parameters and the state variable problem can be omitted, and consequently, feedback control is simplified.
By comparing Equation (48) with Equation (50), the expression of the control variables can be obtained, and the corresponding formula is as follows:
where the expressions of
a1—
a5,
b1—
b5 are found in
Appendix C.
Thus, the control law can be defined as follows:
where
u = Uf, and
z2 is extended variable.
The schematic of the proposed BFSMC based on ESO is shown in
Figure 1.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}