
Aerodynamic Analysis of a Helical Vertical Axis Wind Turbine



Abstract
:1. Introduction
2. Numerical Method Setup
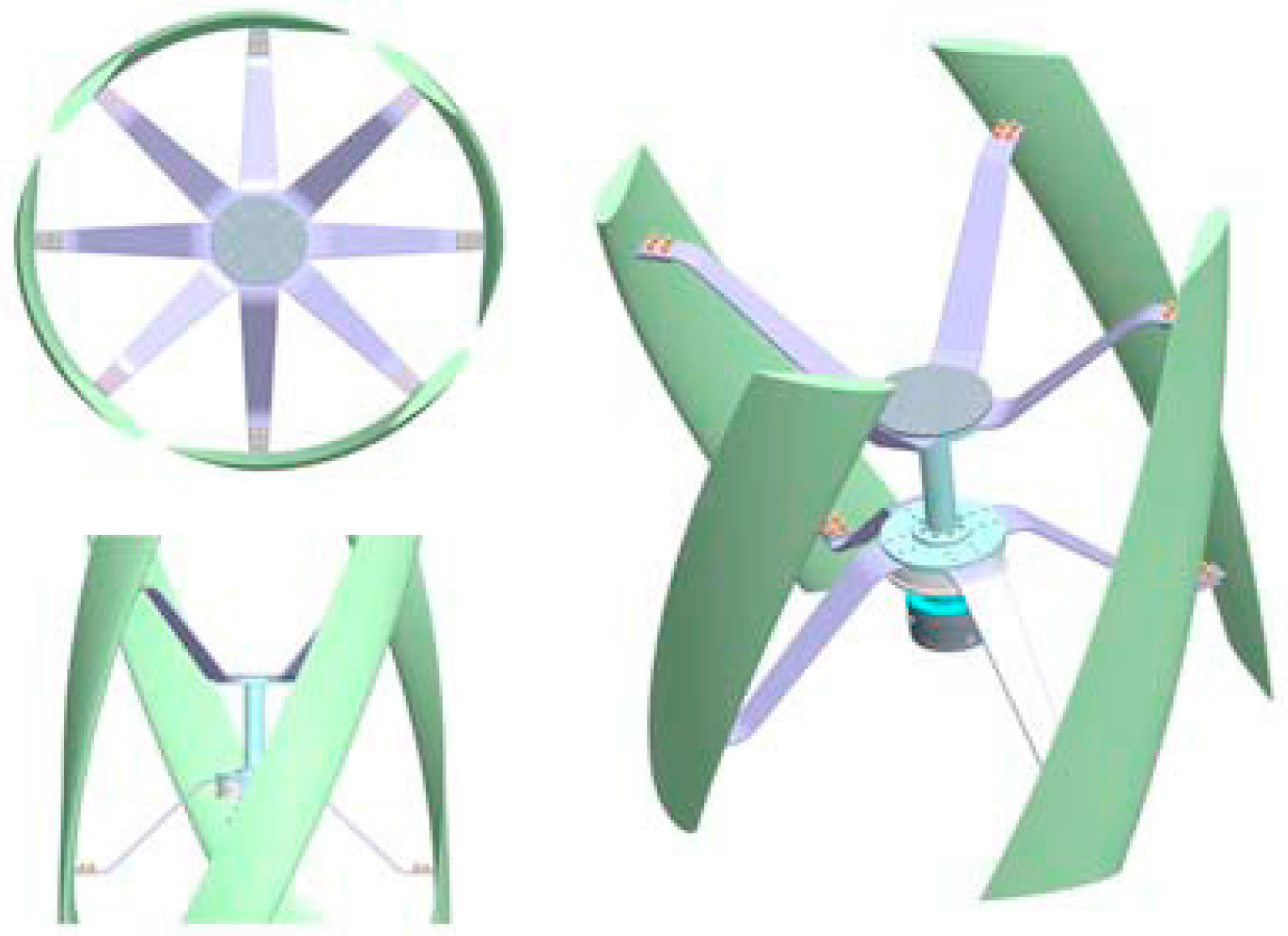
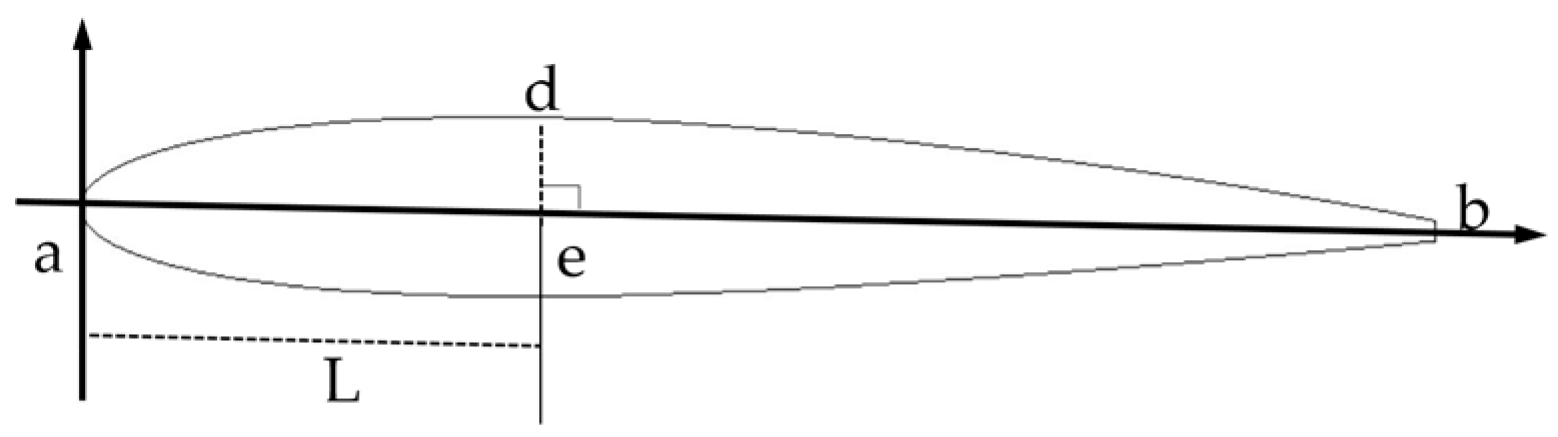
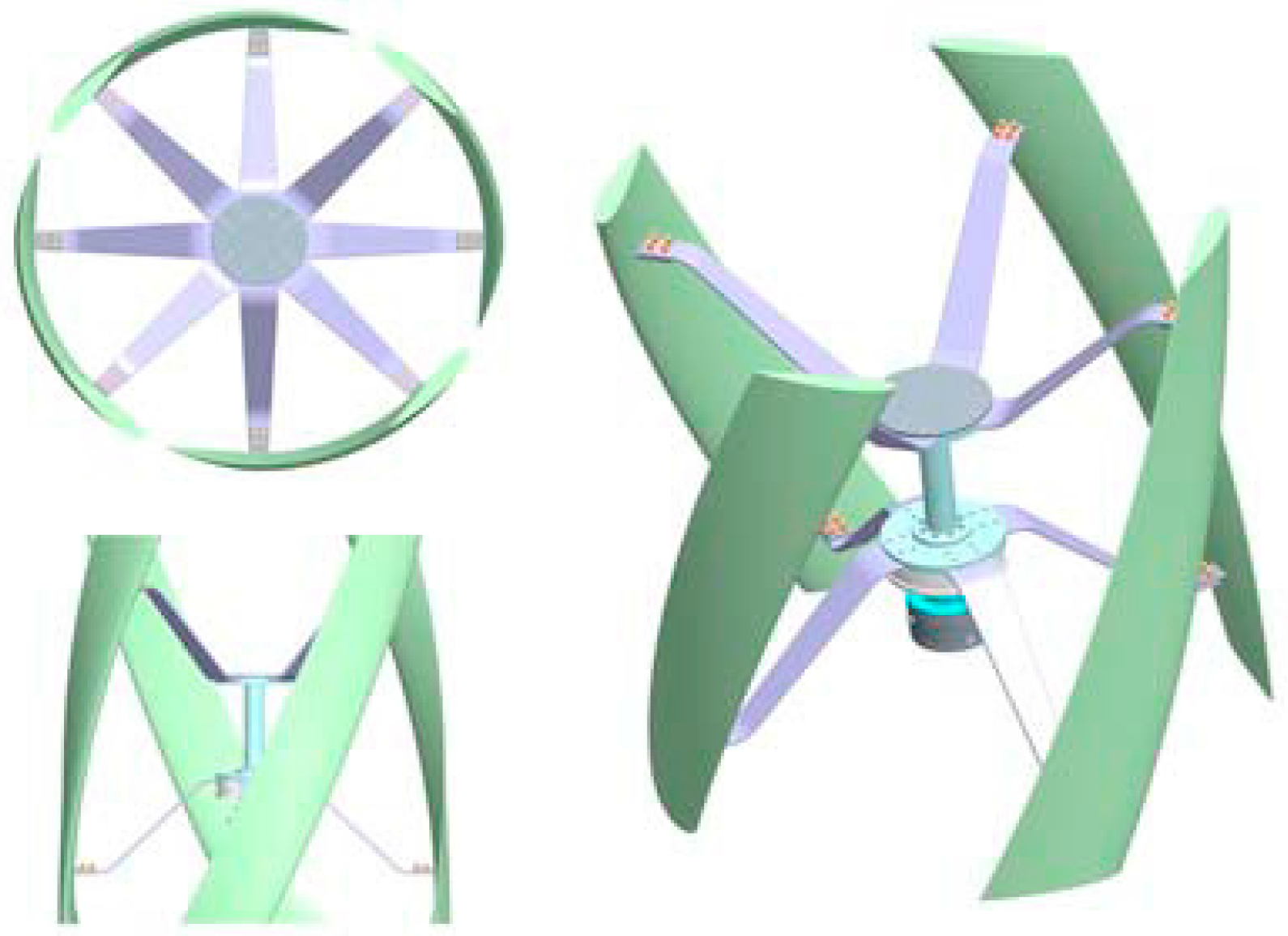
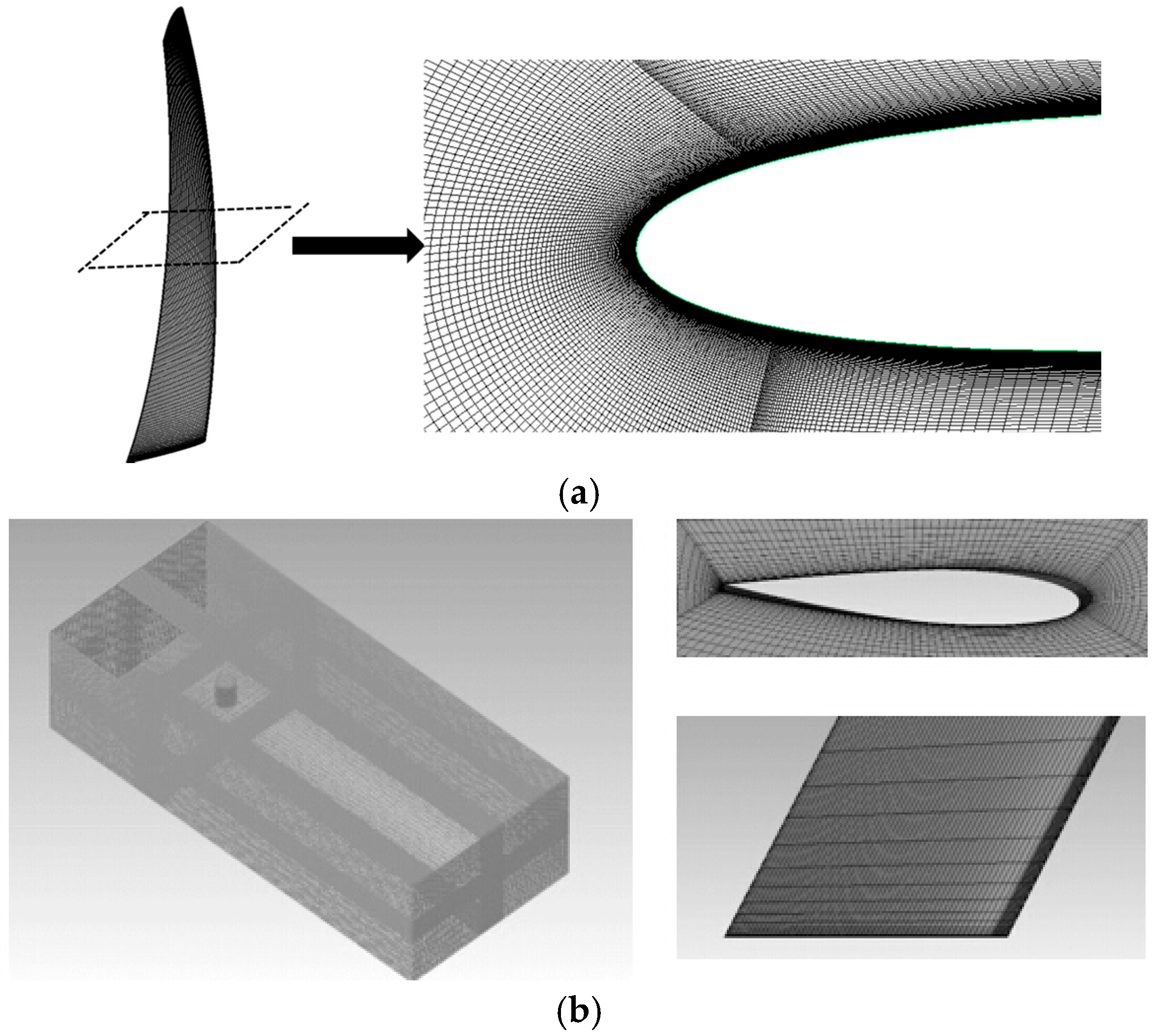
2.1. Geometrical Introduction
2.2. Solving Equations
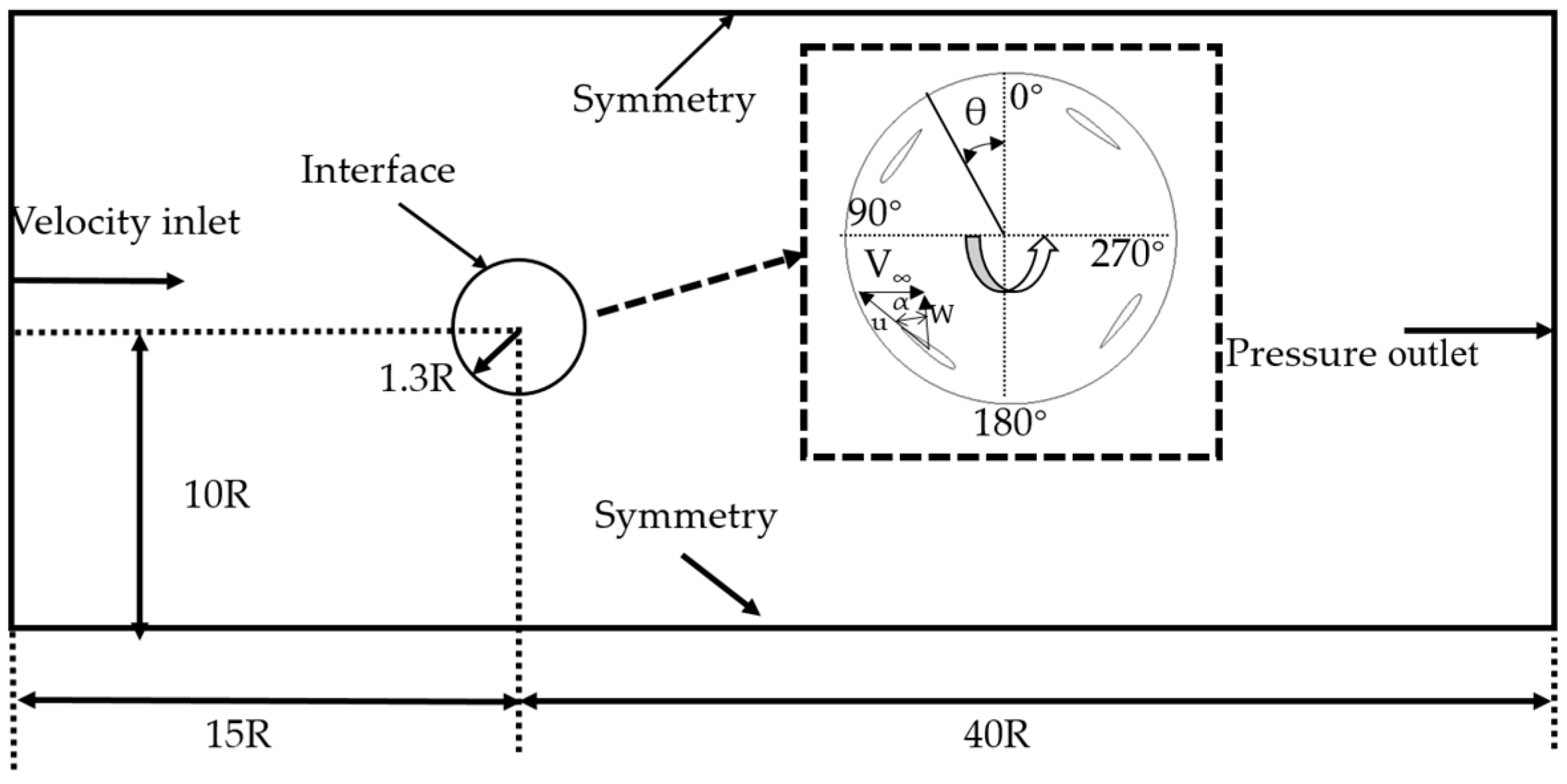
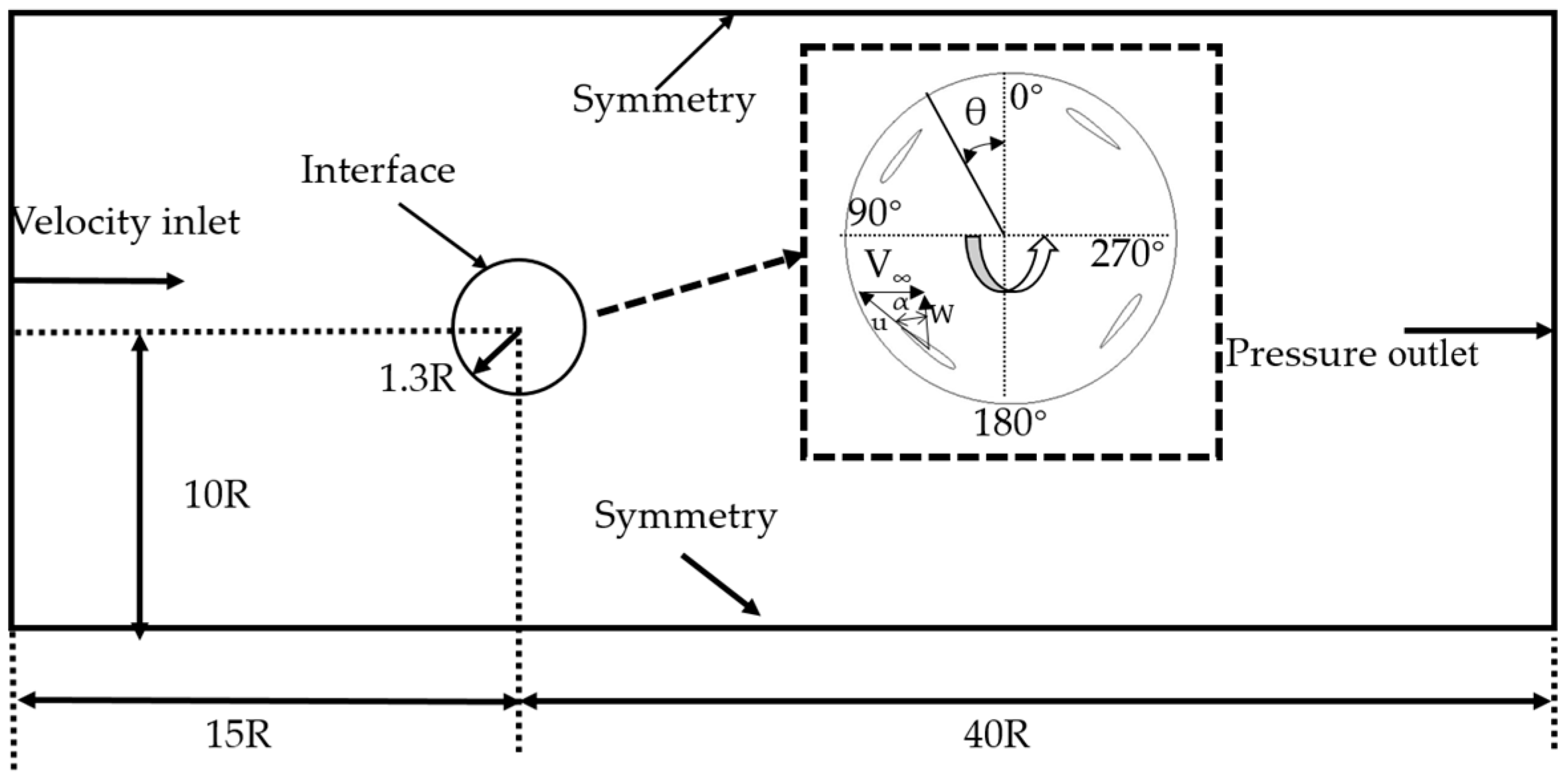
2.3. Boundary Condition
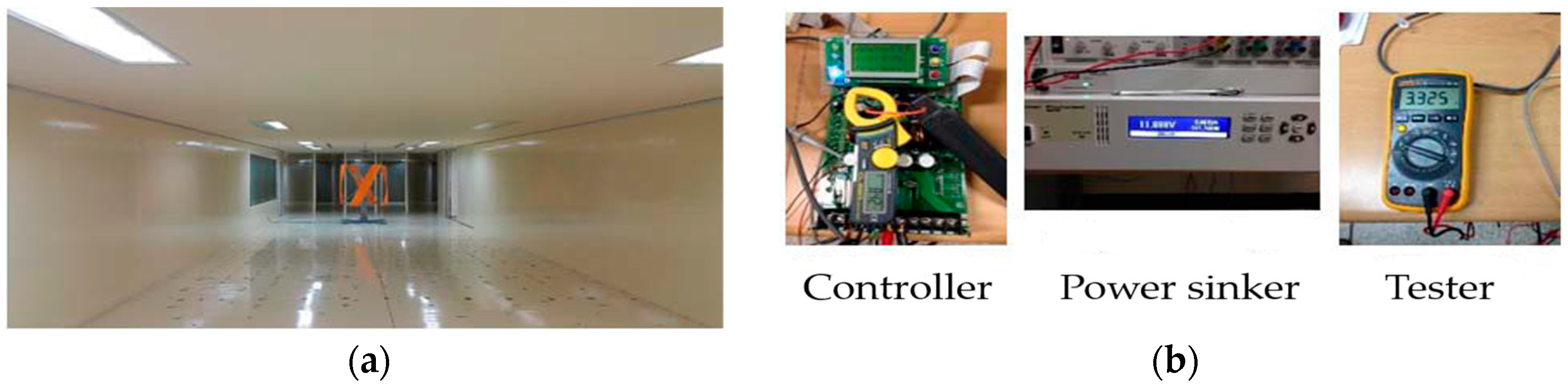
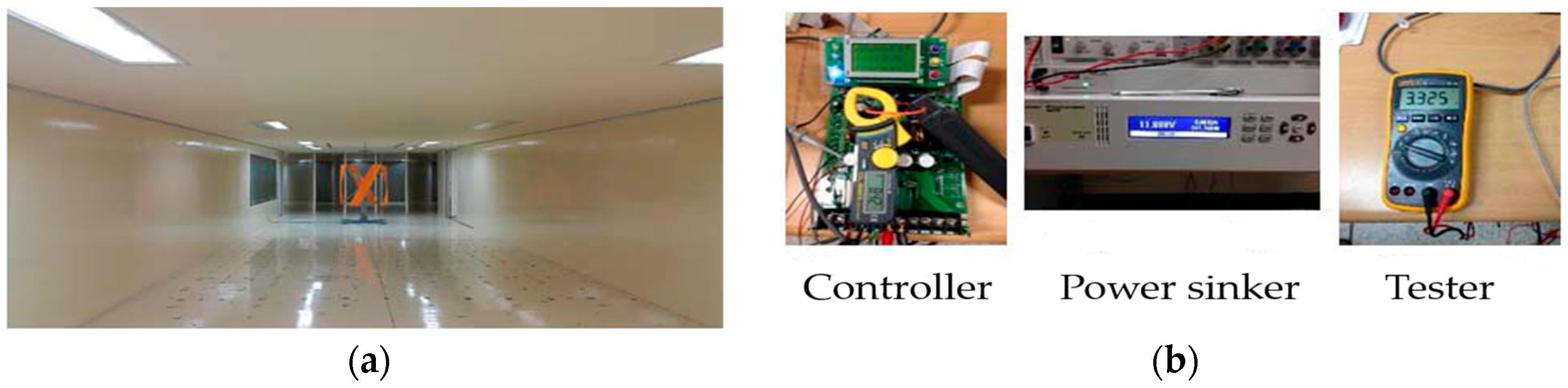
3. Experimental Validation
4. Results
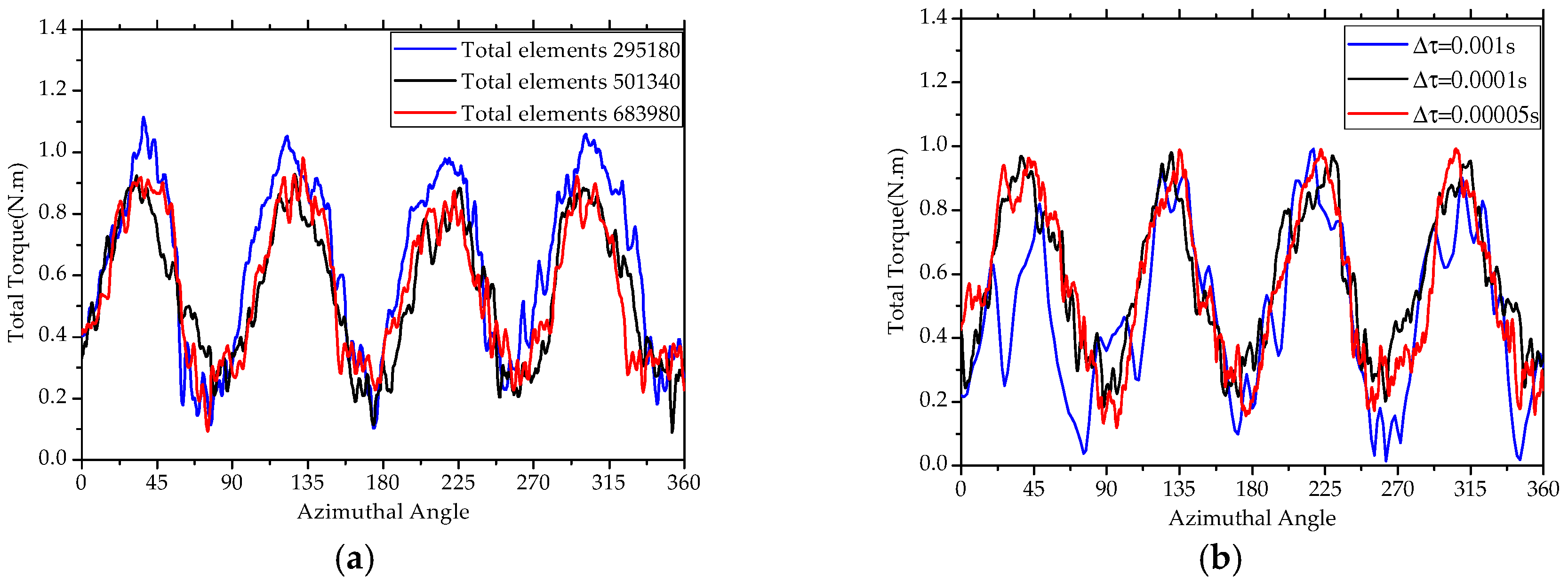
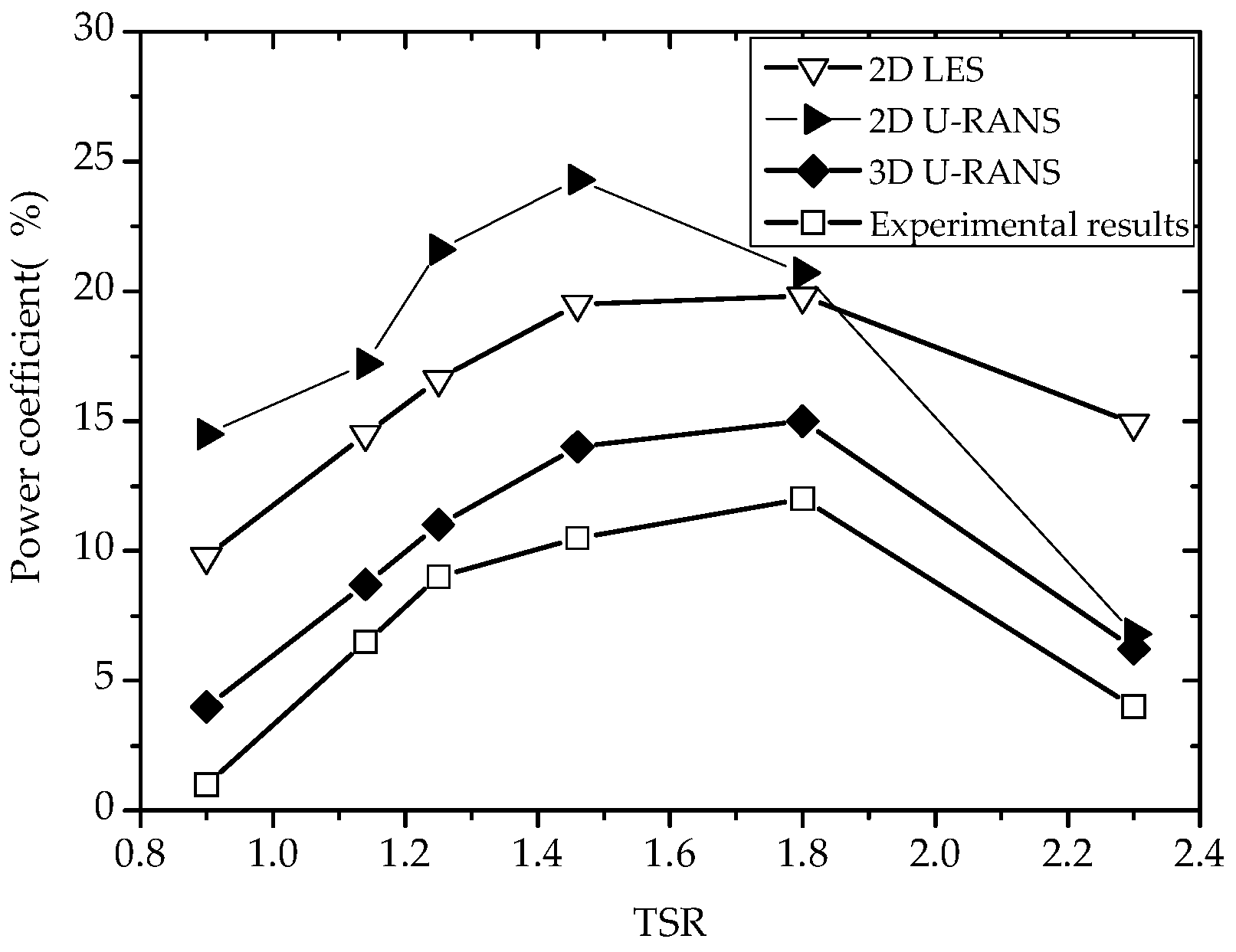
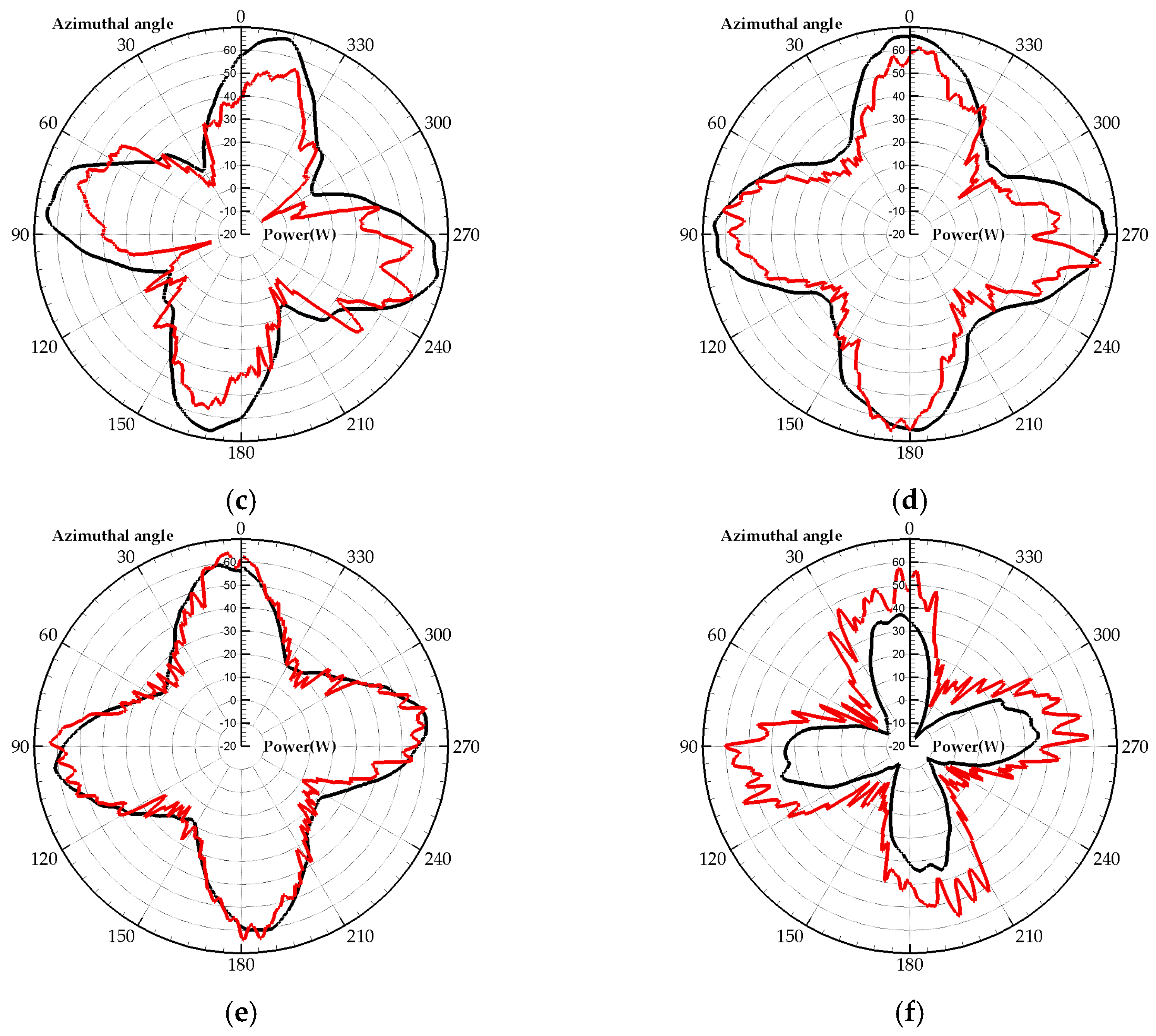
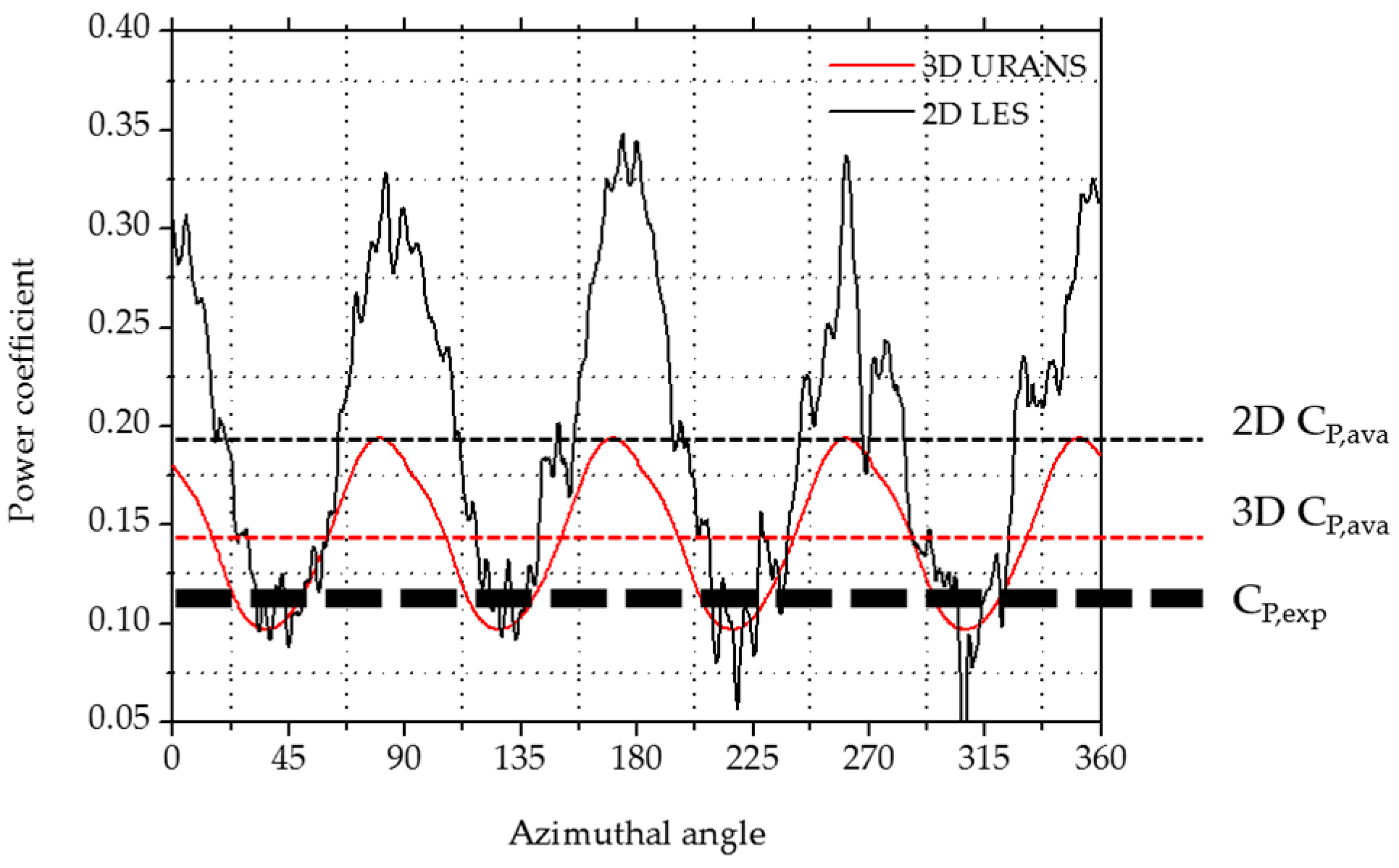
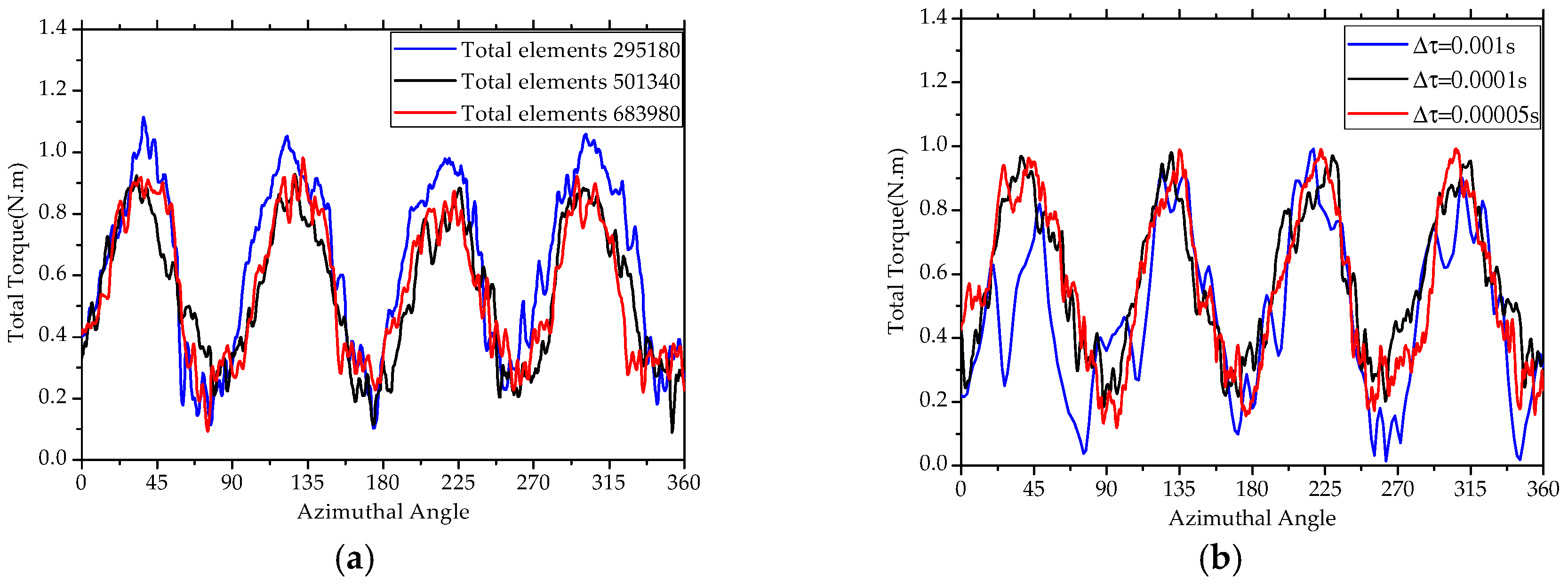
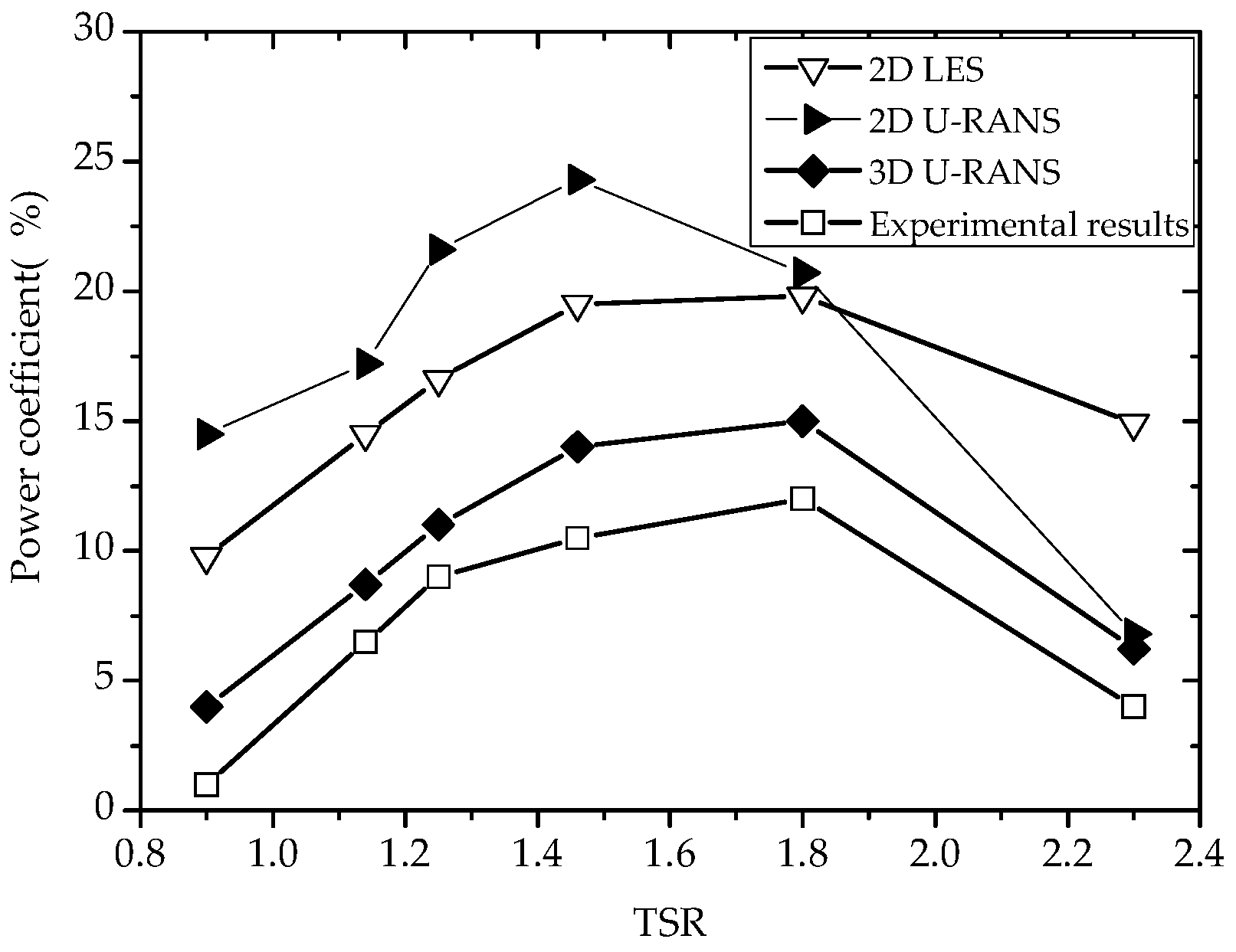
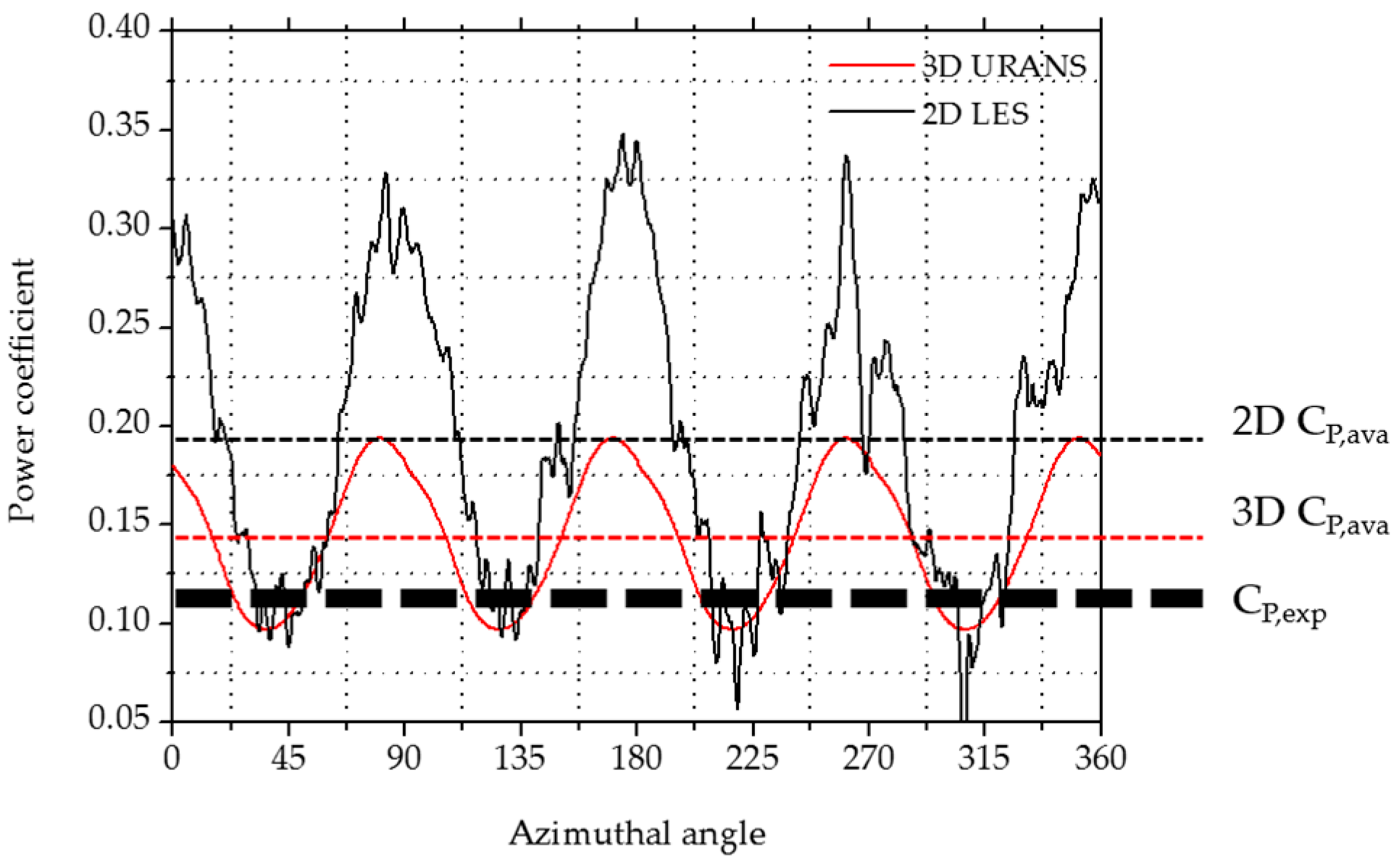
4.1. Total Torque Analysis and Its Validation
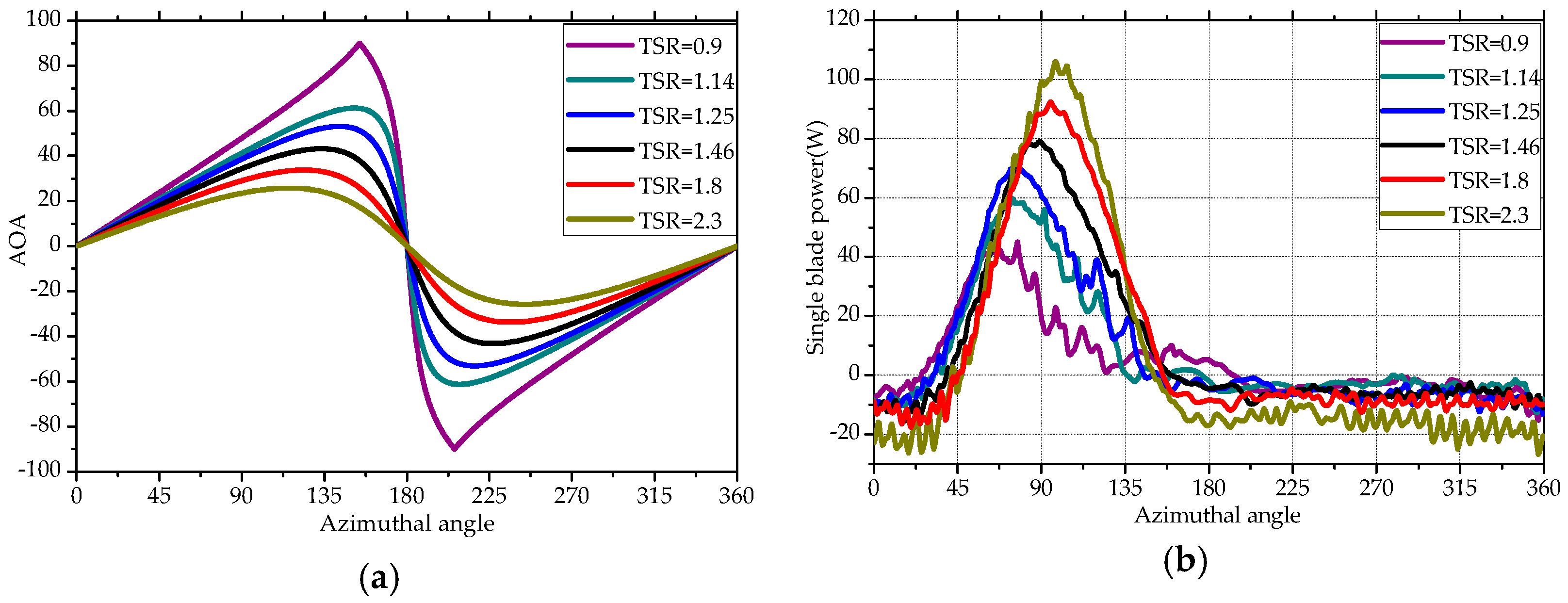
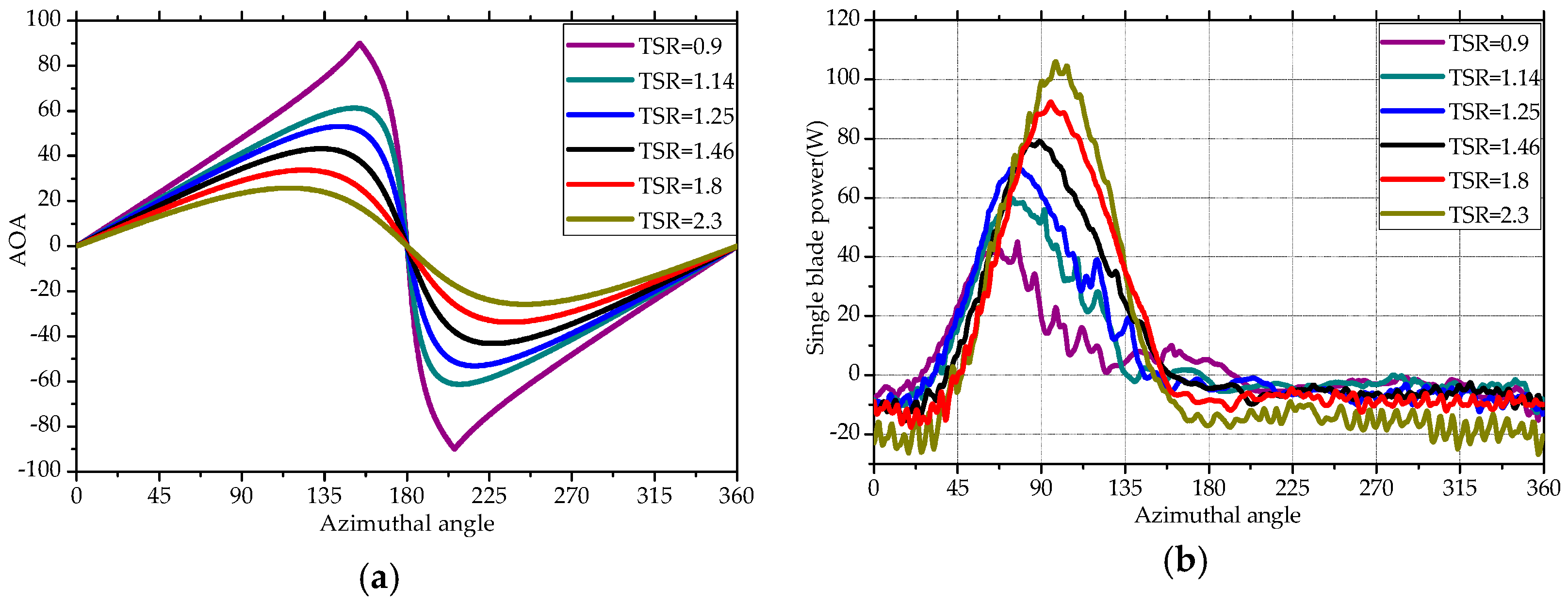
4.2. Blade Aerodynamics Analysis by the LES Method
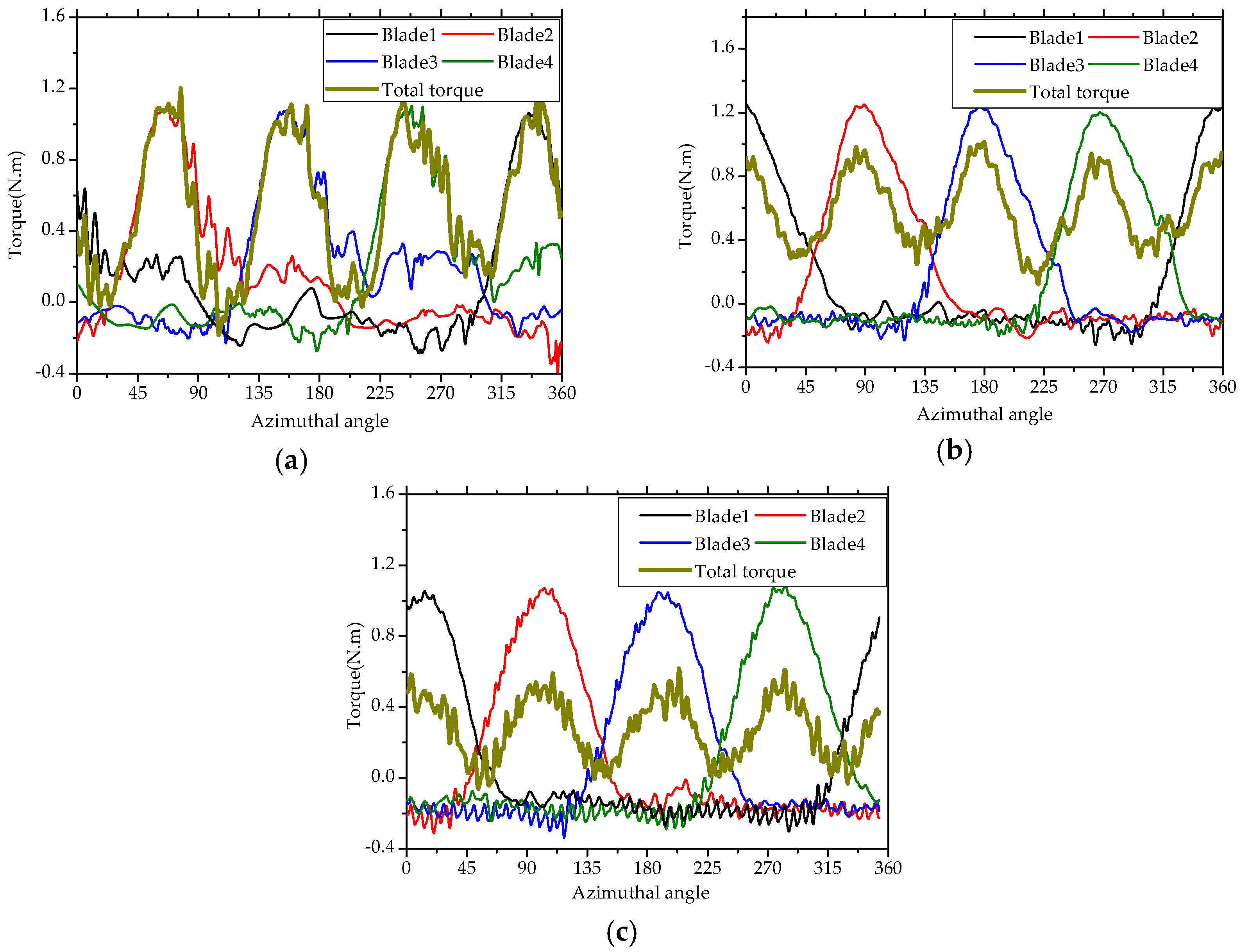
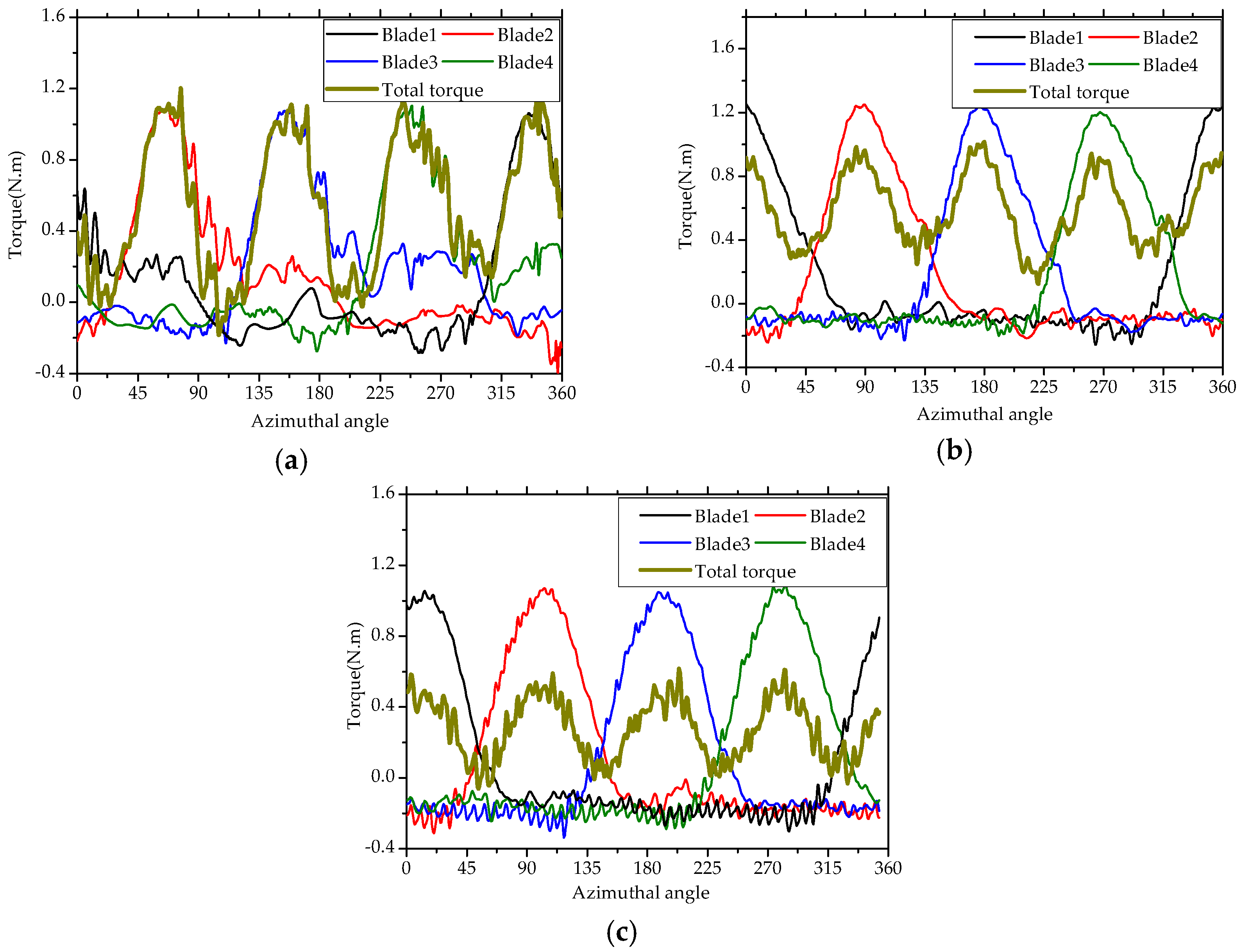
4.2.1. Blade Torque
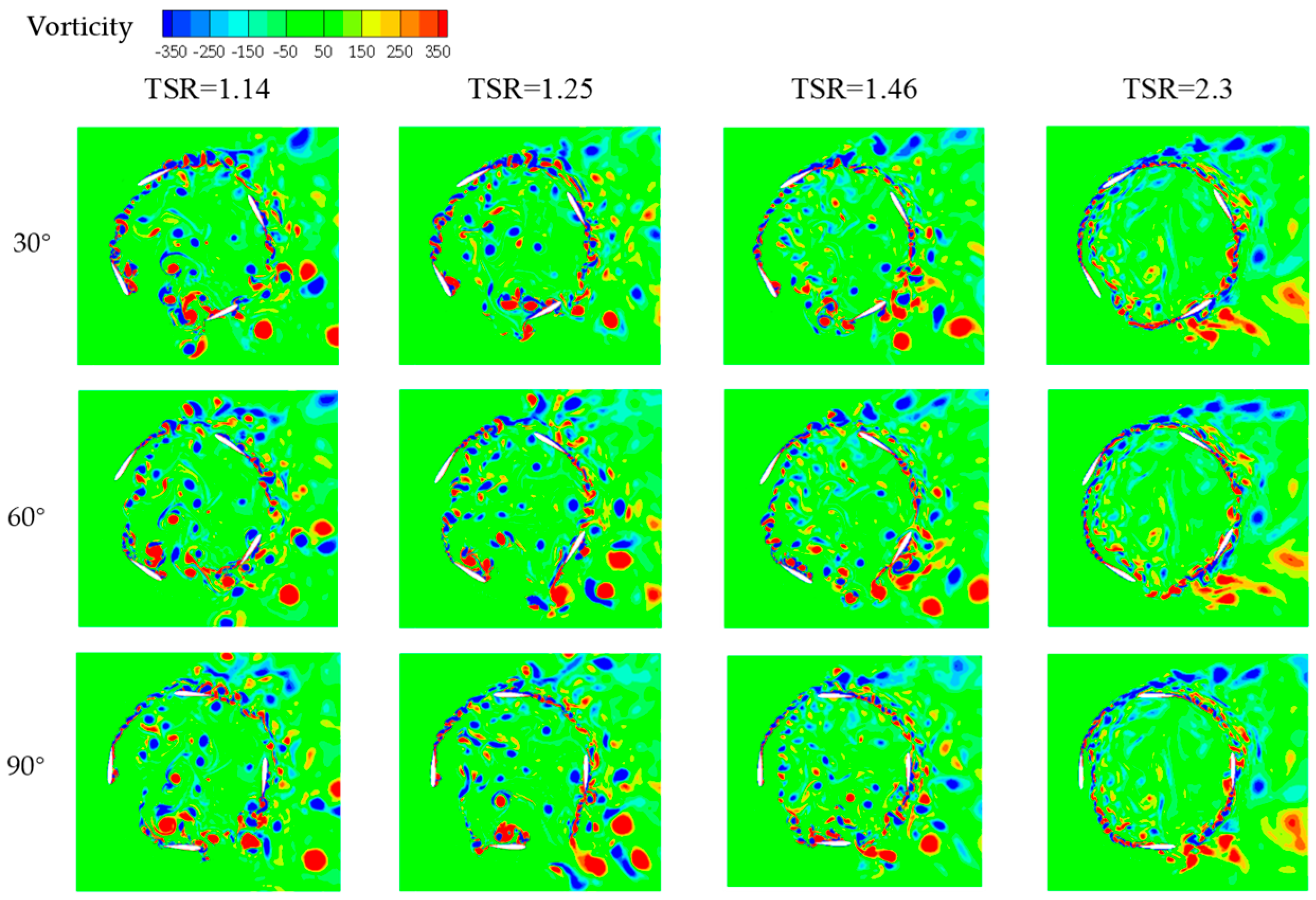
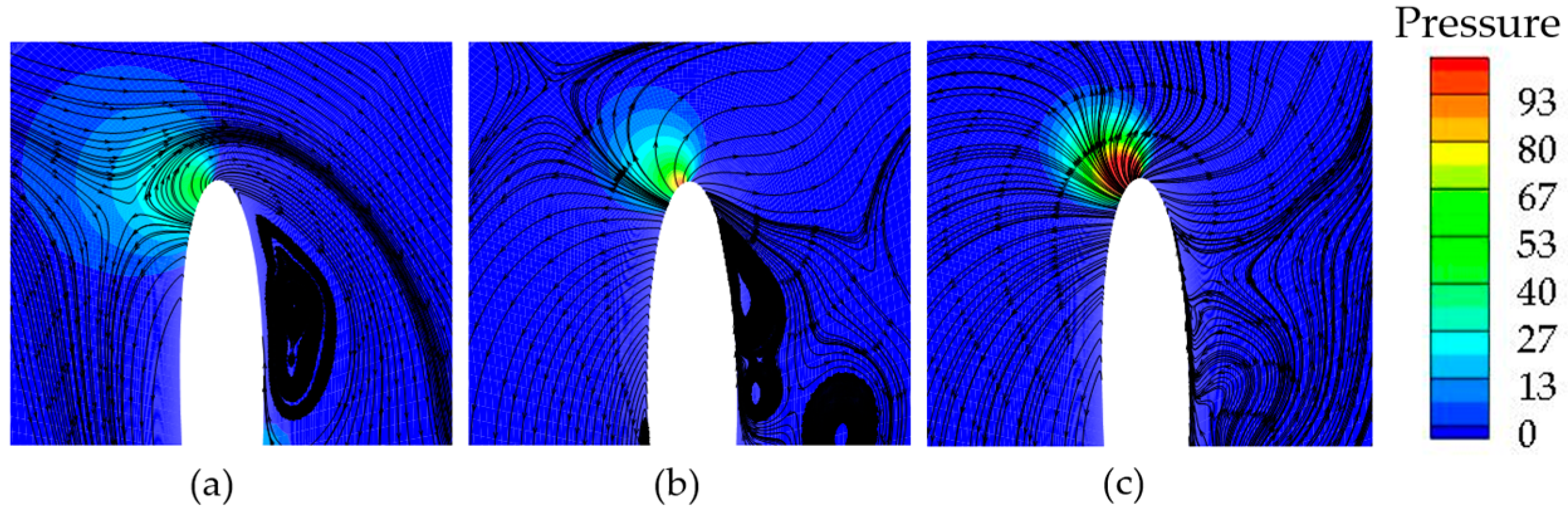
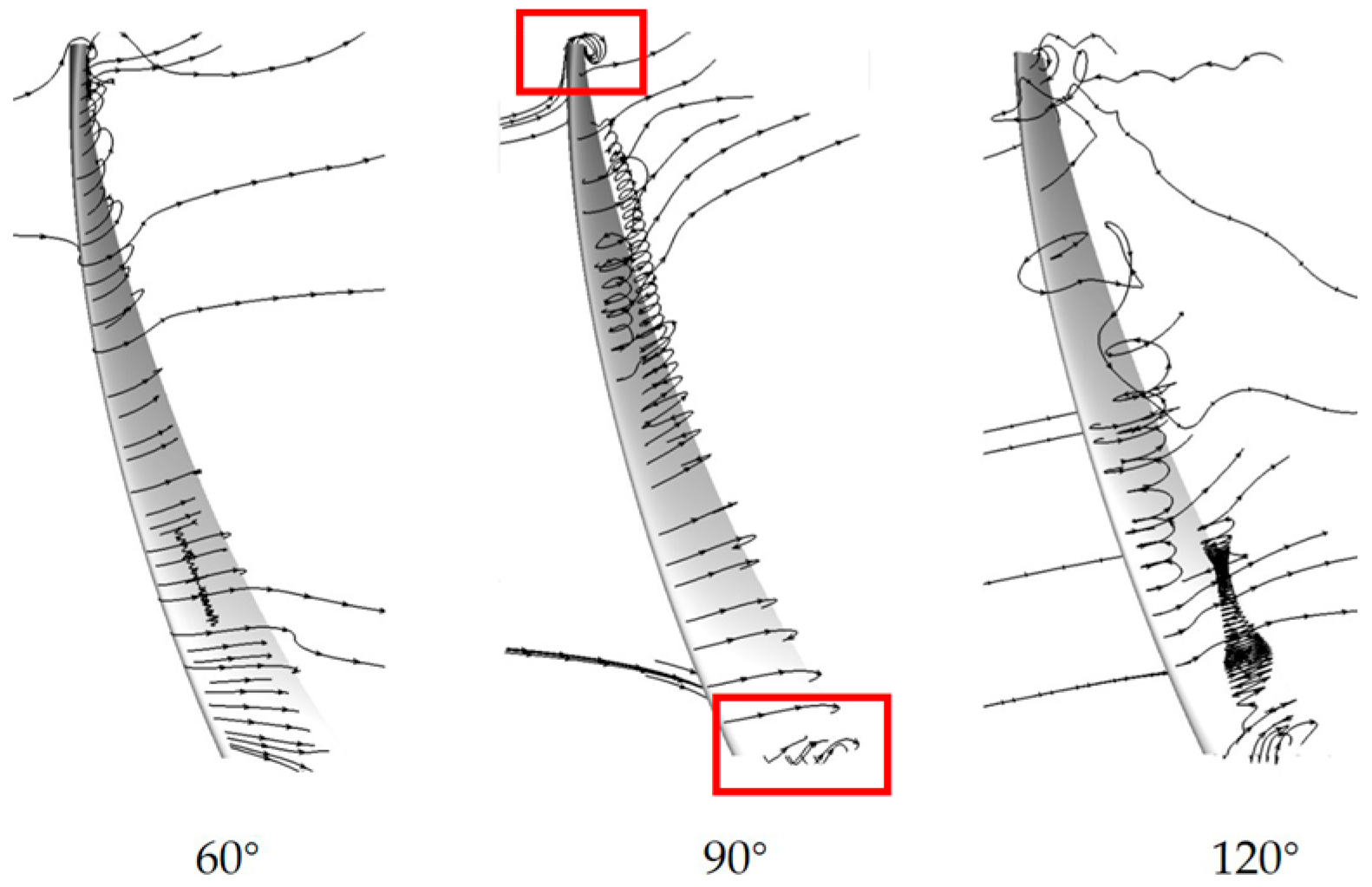
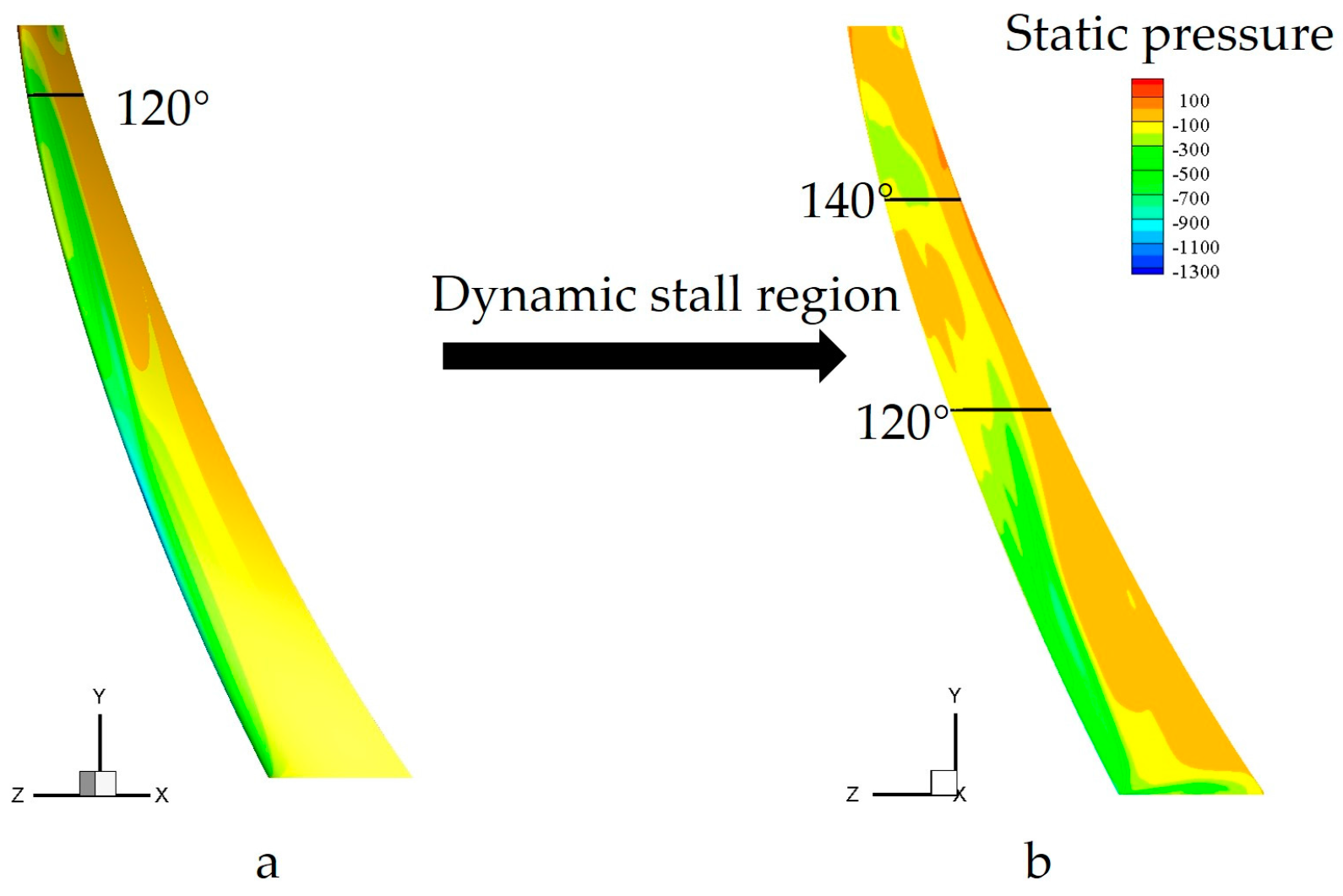
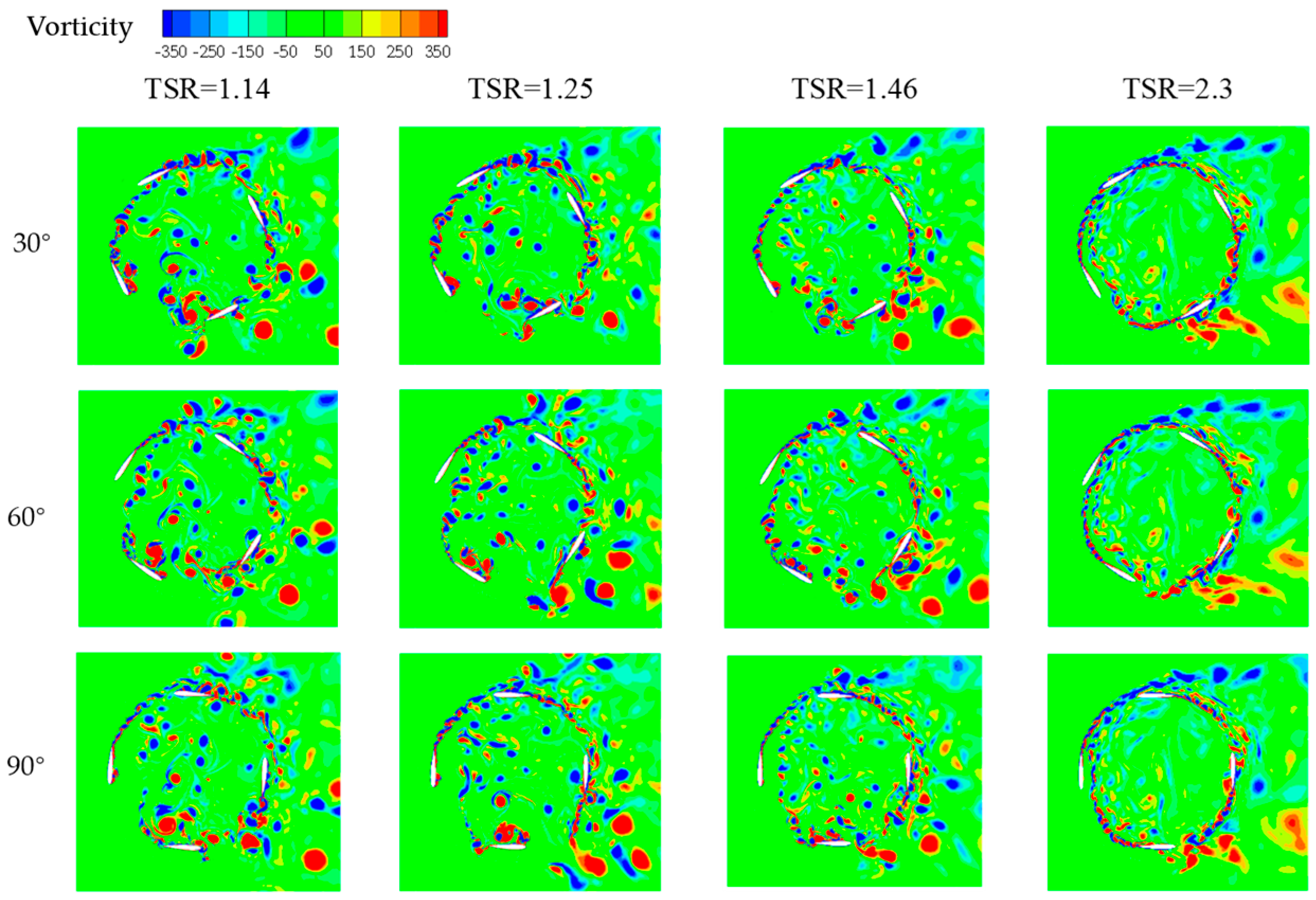
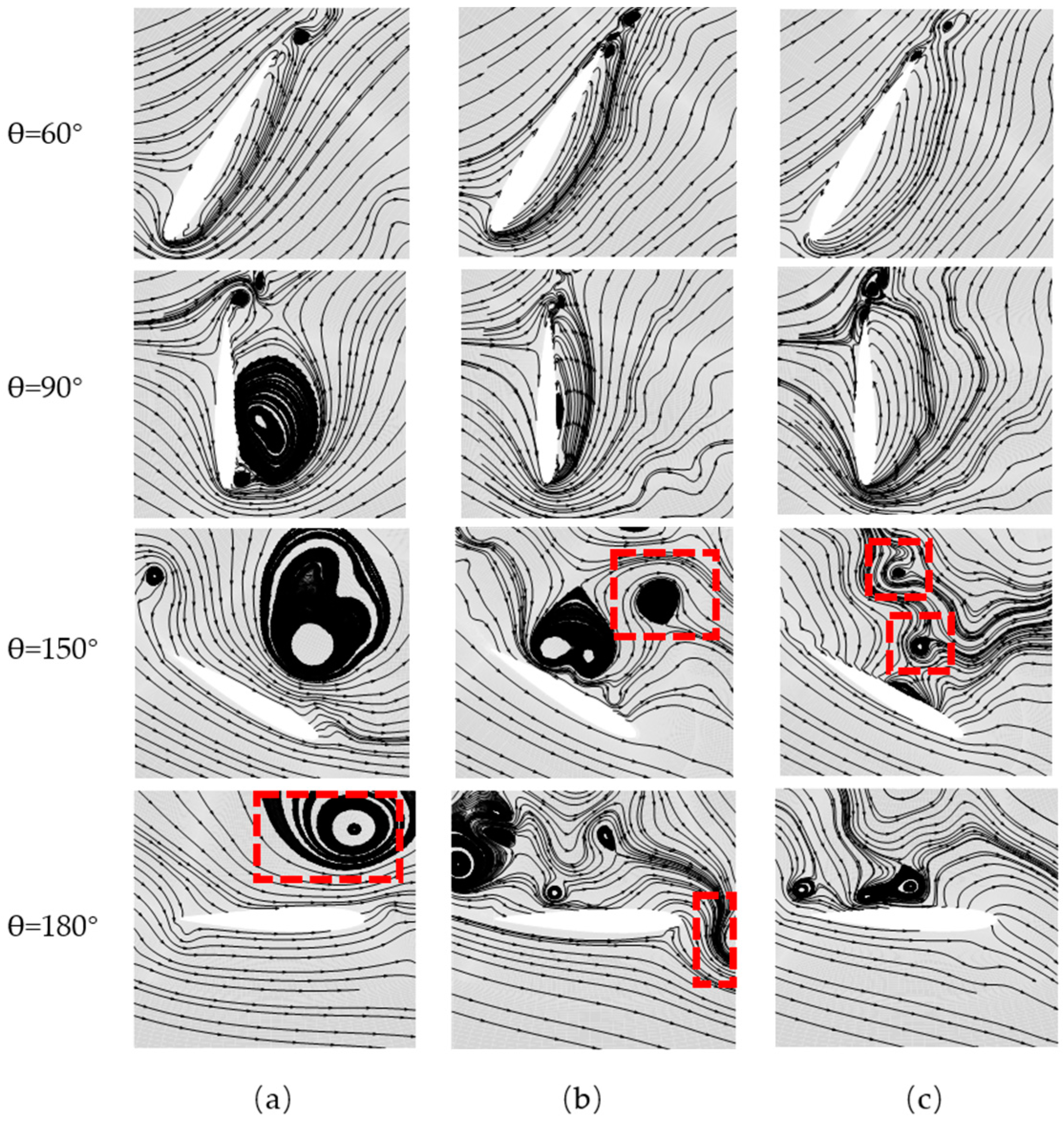
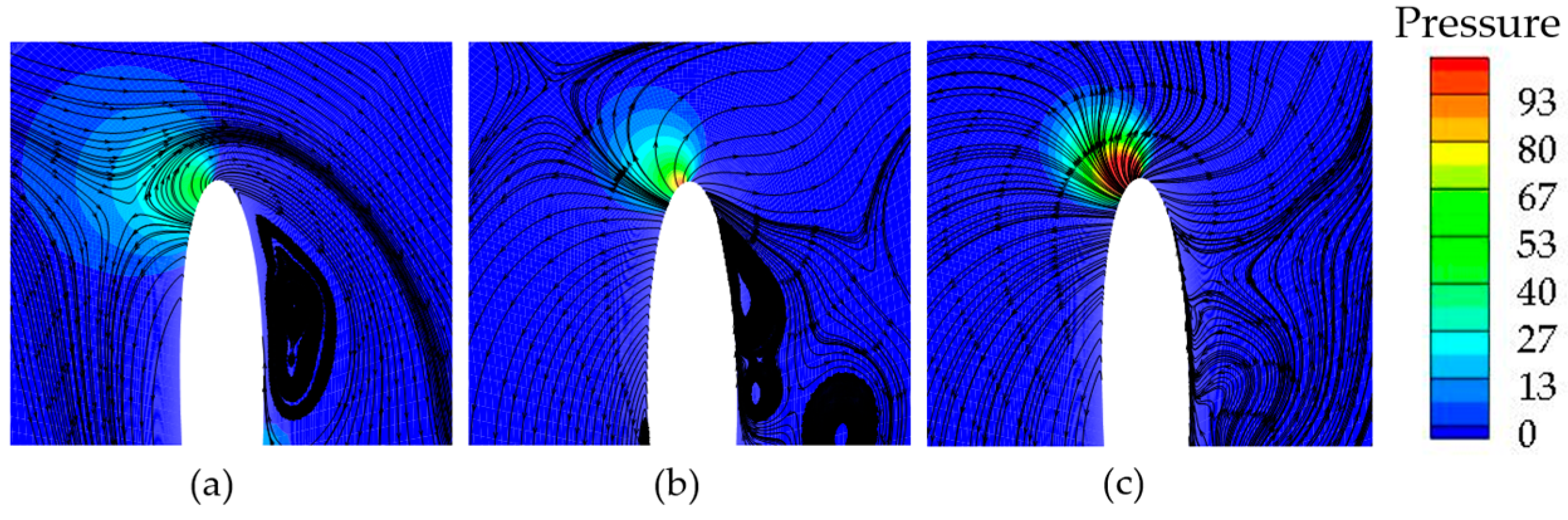
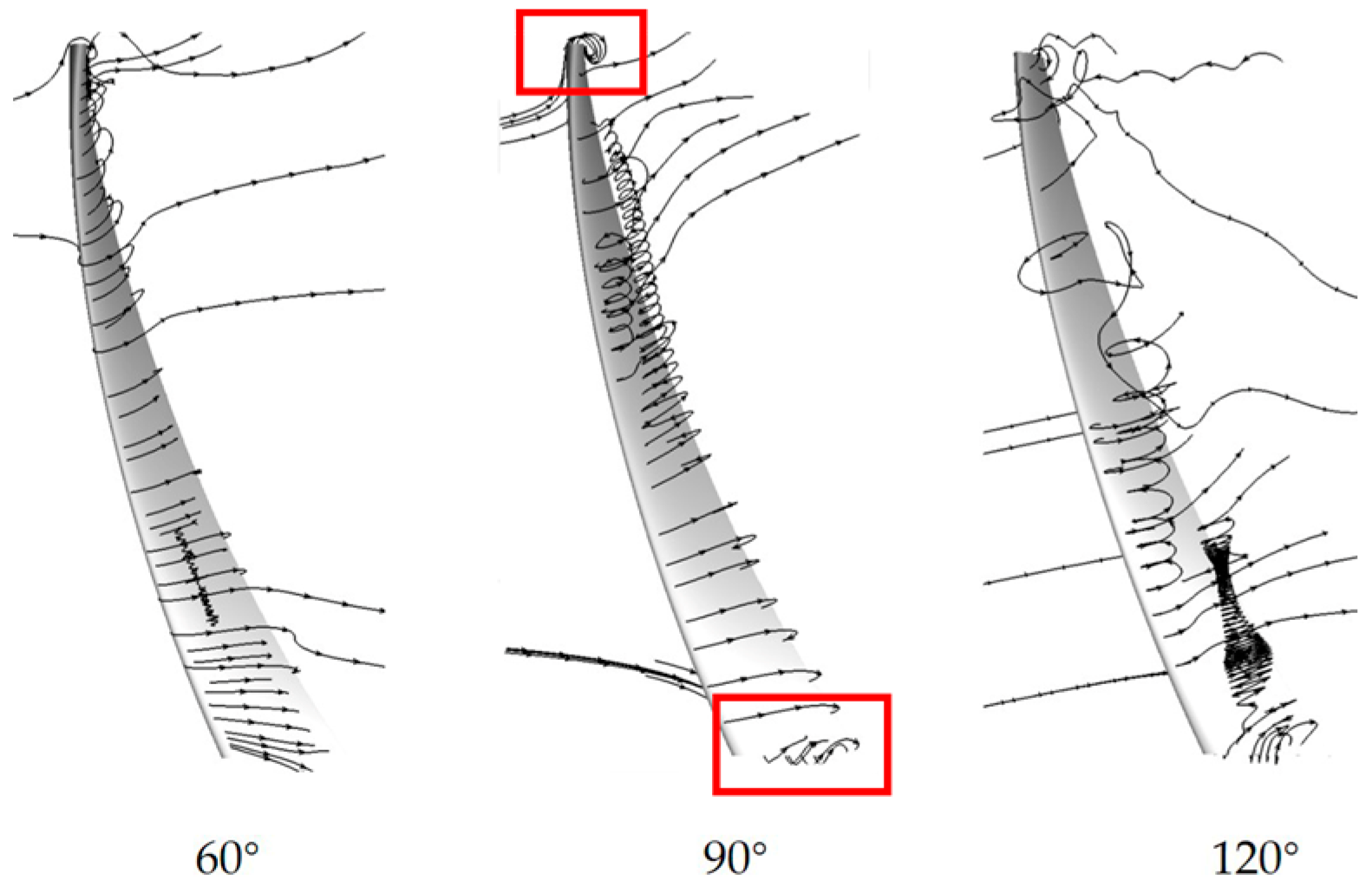
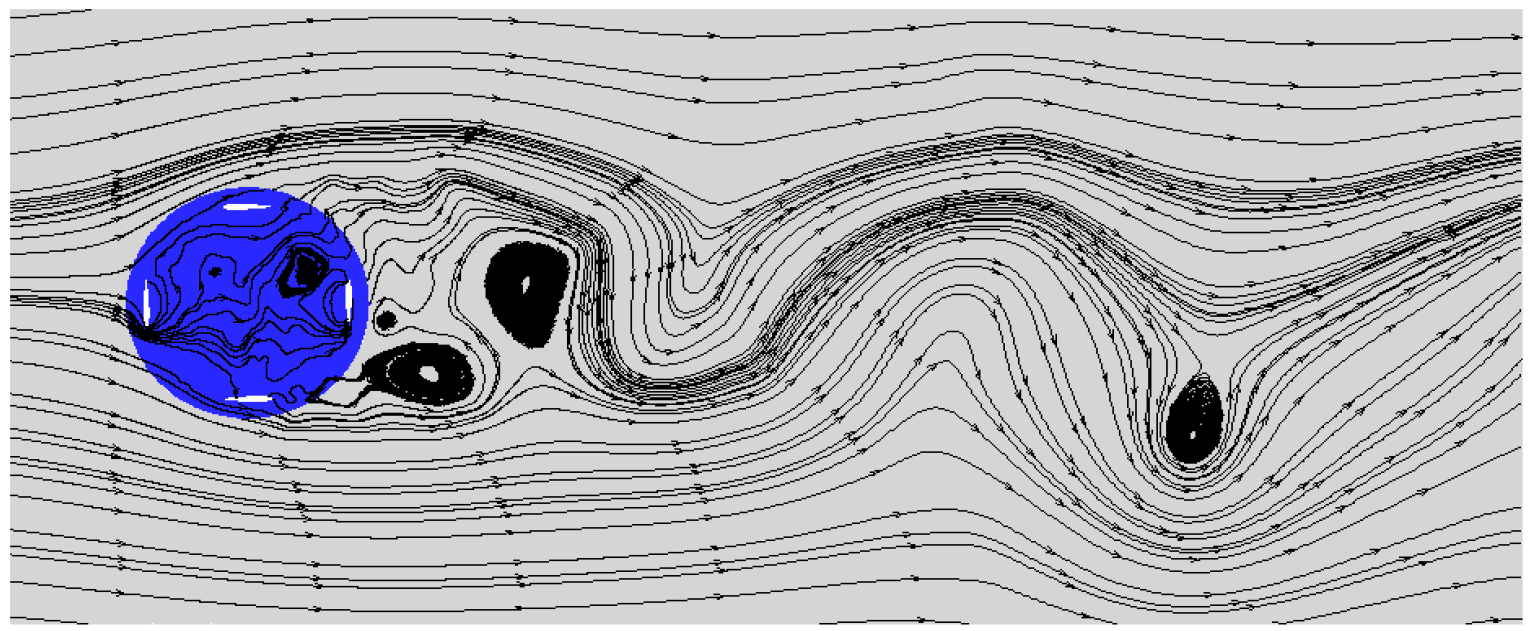
4.2.2. Detailed Flow Field Analysis
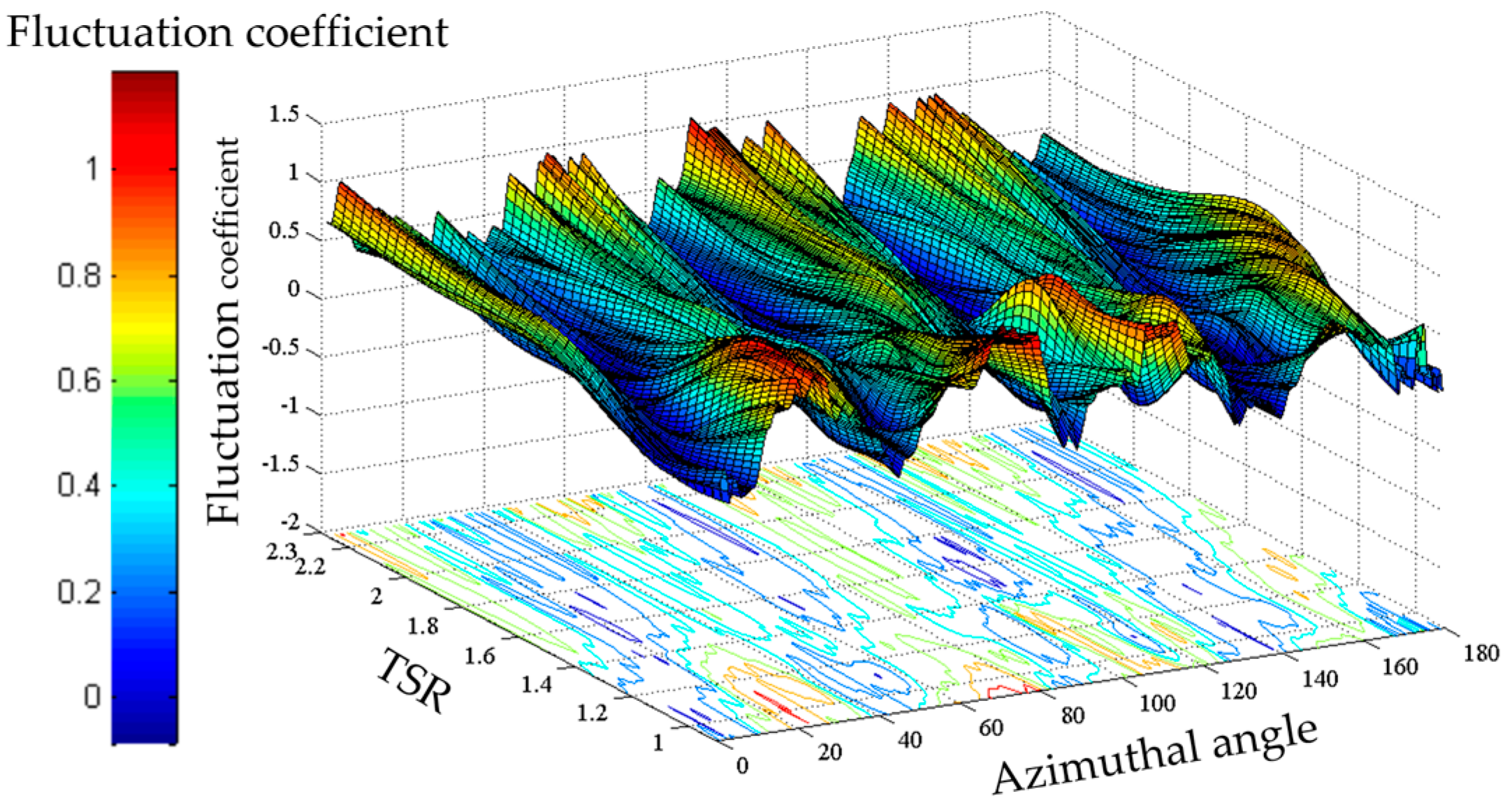
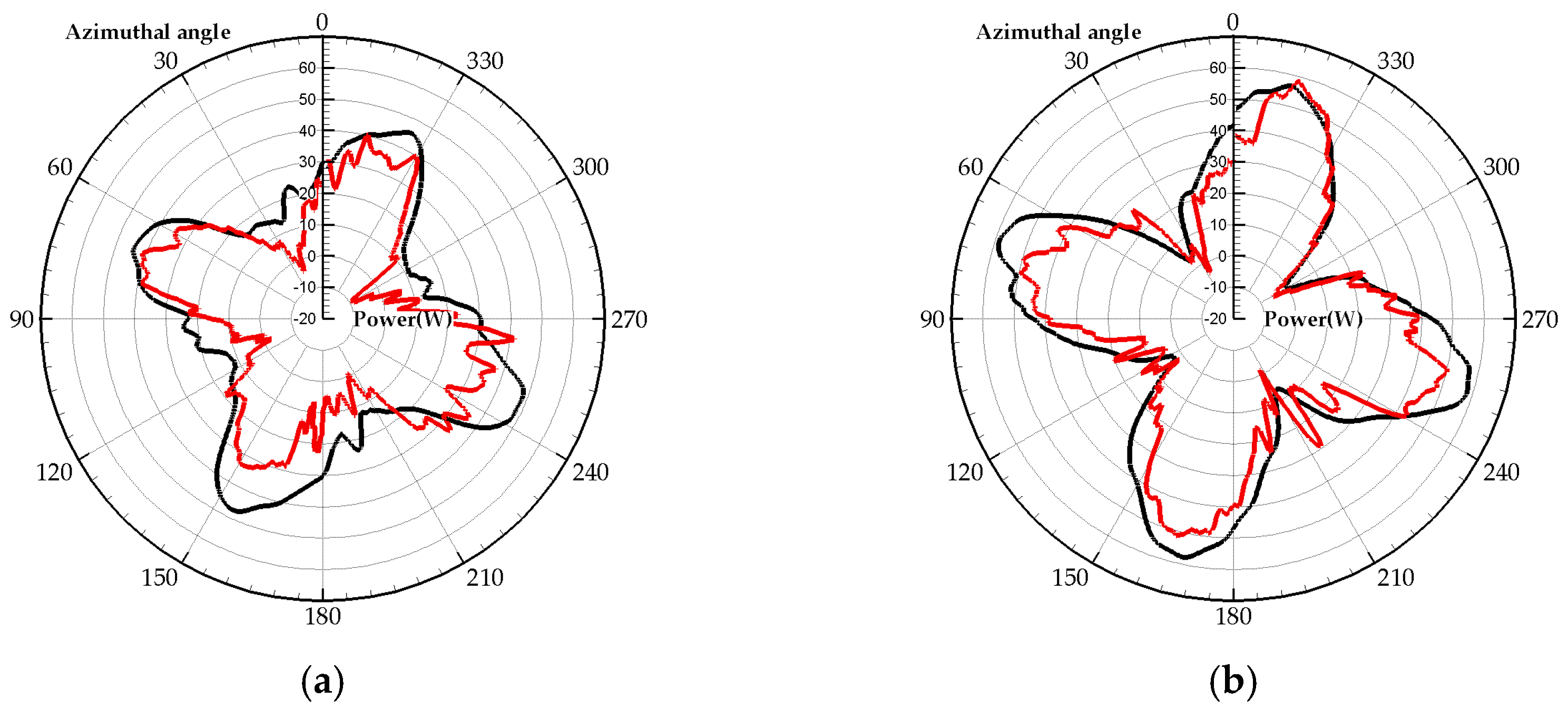
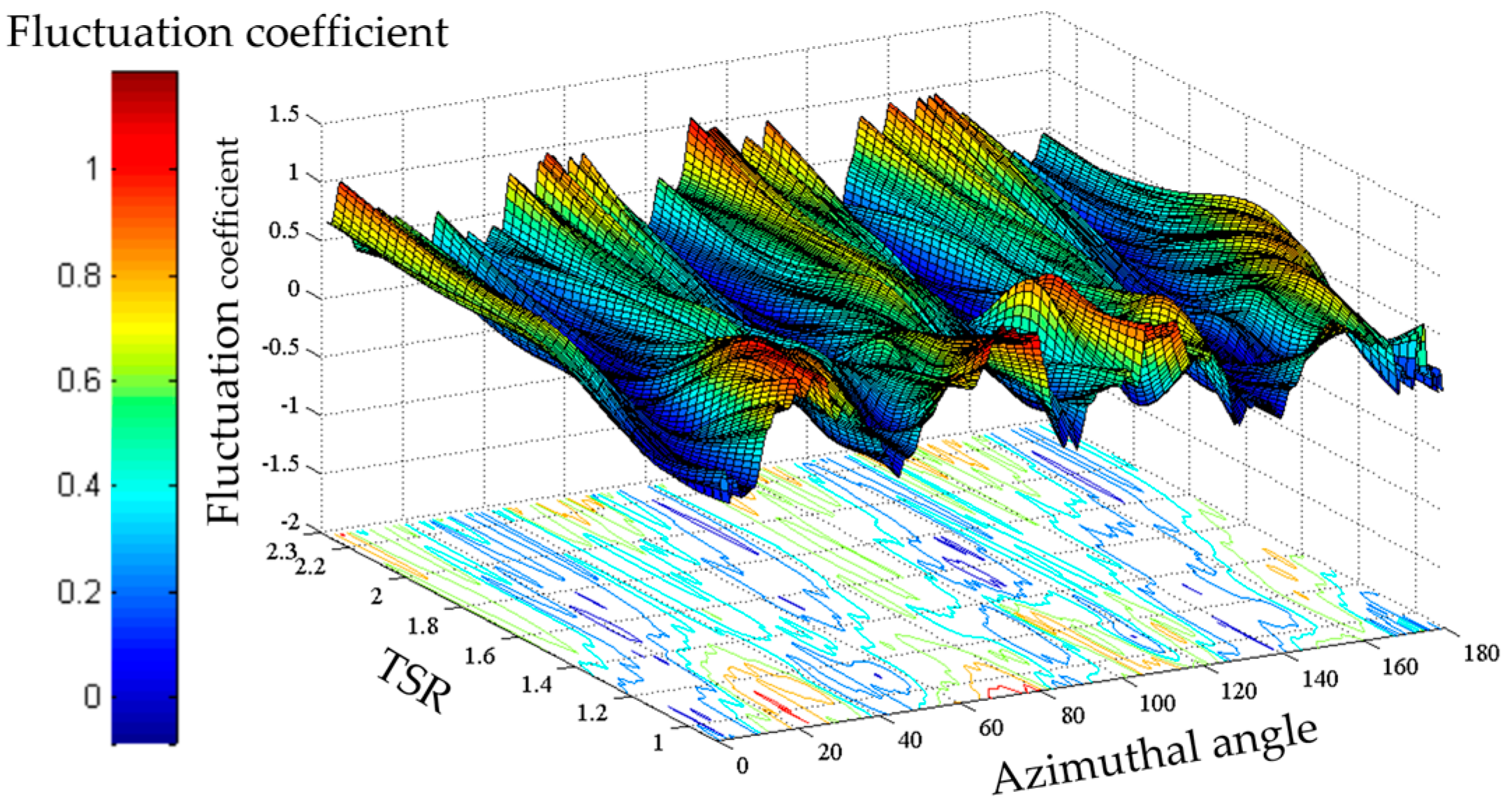
4.2.3. Power Fluctuation
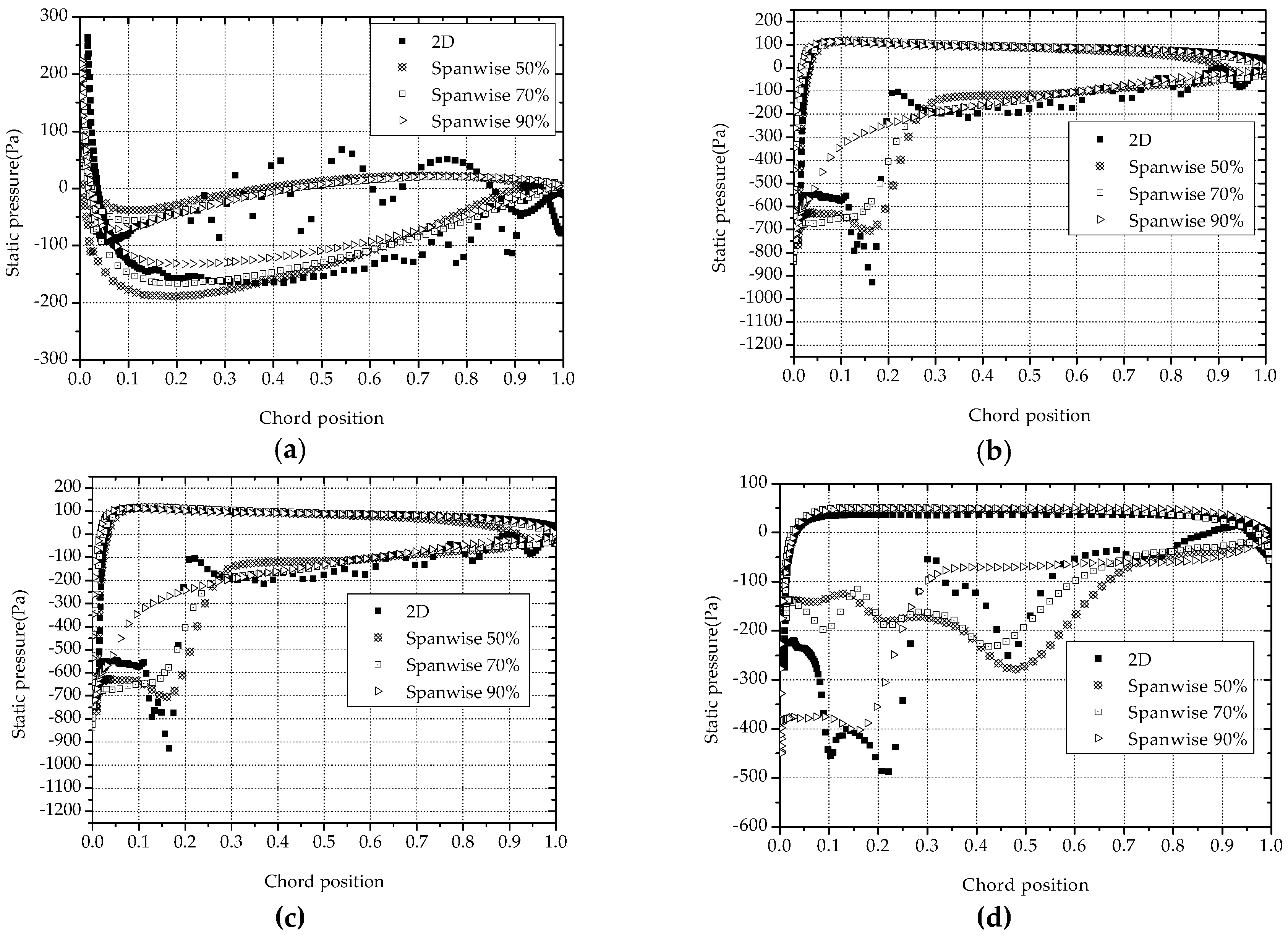
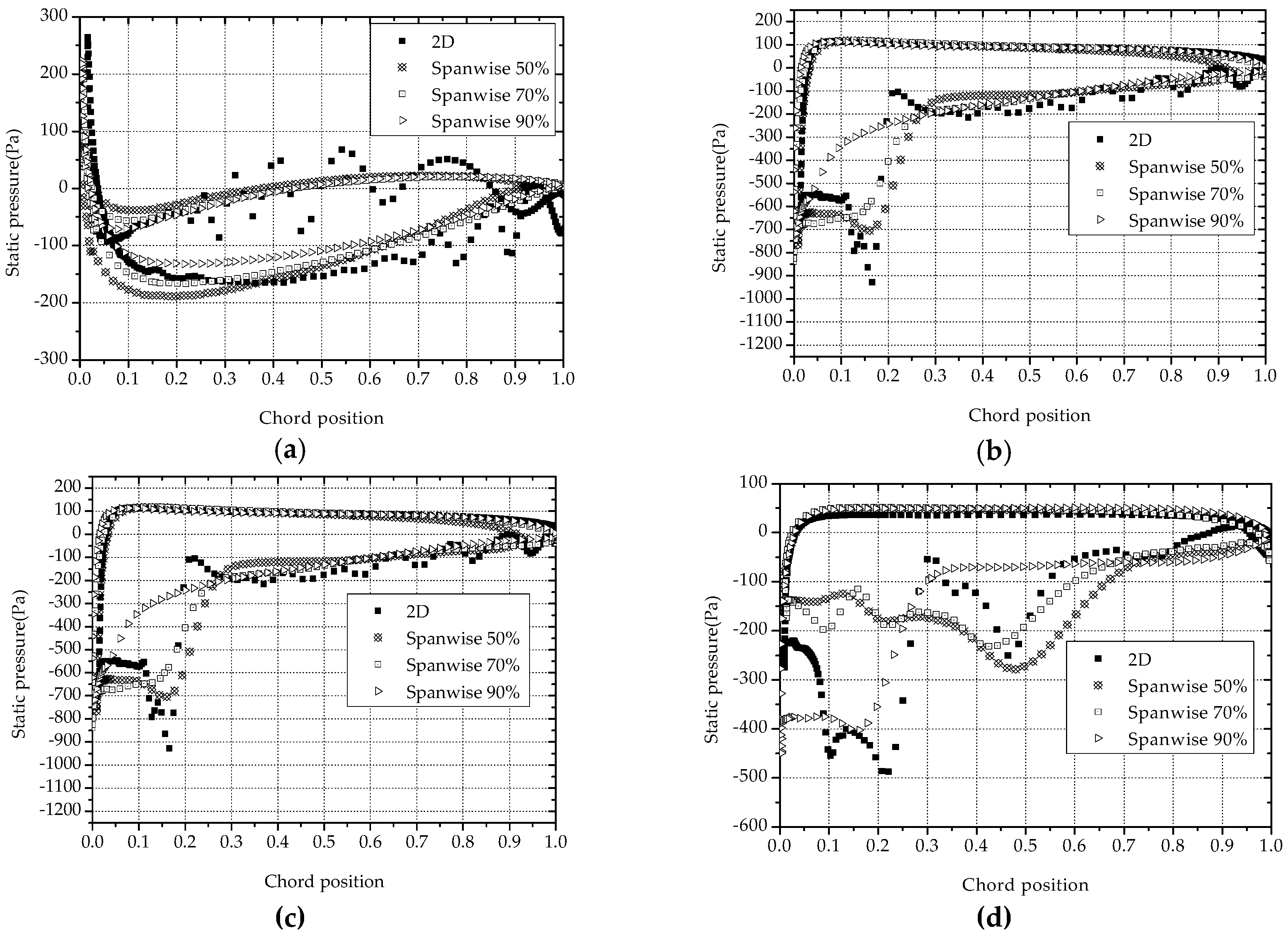
4.3. The Three Dimensional Effects on Aerodynamics Performance
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| AOA | Angle of attack |
| c | The chord length |
| Power coefficient | |
| The frequency of output voltage | |
| Normal force | |
| Tangential force | |
| H | Blade height |
| HAWTs | Horizontal axis wind turbines |
| HVAWT | Helical vertical axis wind turbine |
| LES | Large eddy simulation |
| m | The number of magnetic pole pairs |
| MPI | Message passing interface |
| MRF | Moving reference frame |
| n | The rotational speed (r/min) |
| p | Pressure |
| R | The radius of HVAWT |
| Chord length based Reynold number | |
| T | Torque |
| Averaged torque | |
| TSR | Tip speed ratio |
| u | The rotational velocity (m/s) |
| U-RANS | Unsteady Reynold Averaged Naiver-Stokes |
| VAWTs | Vertical axis wind turbines |
| Far field velocity | |
| W | The relative velocity |
| Greek symbol | |
| Angle of attack | |
| The azimuthal angle | |
| The time step | |
| The rotational speed (rad/s) | |
| Power fluctuation coefficient | |
| The relative chord position | |
References
- Ferreira, C.J.S.; van Bussel, G.J.W.; van Kuik, G.A.M. Wind tunnel hotwire measurements, flow visualization and thrust measurement of a vawt in skew. J. Sol. Energy Eng. Trans. ASME 2006, 128, 487–497. [Google Scholar] [CrossRef]
- Rajagopalan, R.G.; Fanucci, J.B. Finite difference model for vertical axis wind turbines. J. Propul. Power 1985, 1, 432–436. [Google Scholar] [CrossRef]
- Strickland, J.H. Darrieus Turbine: A Performance Prediction Model Using Multiple Streamtubes; Sandia Labs.: Albuquerque, NM, USA, 1975. [Google Scholar]
- Dixon, K.; Simao Ferreira, C.; Hofemann, C.; Van Bussel, G.; Van Kuik, G. A 3D unsteady panel method for vertical axis wind turbines. In Proceedings of the European Wind Energy Conference & Exhibition (EWEC), Brussels, Belgium, 31 March–3 April 2008. [Google Scholar]
- Chen, Y.; Lian, Y. Numerical investigation of vortex dynamics in an h-rotor vertical axis wind turbine. Eng. Appl. Comput. Fluid Mech. 2015, 9, 21–32. [Google Scholar] [CrossRef]
- Zhang, L.; Liang, Y.; Liu, X.; Jiao, Q.; Guo, J. Aerodynamic performance prediction of straight-bladed vertical axis wind turbine based on CFD. Adv. Mech. Eng. 2013, 5. [Google Scholar] [CrossRef]
- Li, C.; Zhu, S.; Xu, Y.-l.; Xiao, Y. 2.5D large eddy simulation of vertical axis wind turbine in consideration of high angle of attack flow. Renew. Energy 2013, 51, 317–330. [Google Scholar] [CrossRef]
- Howell, R.; Qin, N.; Edwards, J.; Durrani, N. Wind tunnel and numerical study of a small vertical axis wind turbine. Renew. Energy 2010, 35, 412–422. [Google Scholar] [CrossRef]
- Gorlov, A.M. Unidirectional helical reaction turbine operable under reversible fluid flow for power systems. US Patent 5,451,137, 19 September 1995. [Google Scholar]
- Alaimo, A.; Esposito, A.; Messineo, A.; Orlando, C.; Tumino, D. 3D CFD analysis of a vertical axis wind turbine. Energies 2015, 8, 3013–3033. [Google Scholar] [CrossRef]
- Scheurich, F.; Brown, R.E. Modelling the aerodynamics of vertical-axis wind turbines in unsteady wind conditions. Wind Energy 2013, 16, 91–107. [Google Scholar] [CrossRef]
- Schuerich, F.; Brown, R.E. Effect of dynamic stall on the aerodynamics of vertical-axis wind turbines. AIAA J. 2011, 49, 2511–2521. [Google Scholar] [CrossRef]
- Yang, B.; Shu, X. Hydrofoil optimization and experimental validation in helical vertical axis turbine for power generation from marine current. Ocean Eng. 2012, 42, 35–46. [Google Scholar] [CrossRef]
- Kirke, B. Tests on ducted and bare helical and straight blade darrieus hydrokinetic turbines. Renew. Energy 2011, 36, 3013–3022. [Google Scholar] [CrossRef]
- Qian, W.-Q.; Fu, S.; Cai, J.-S. Numerical study of airfoil dynamic stall. Acta Aerodyn. Sin. 2001, 19, 427–433. [Google Scholar]
- Heo, Y.-G.; Choi, K.-H.; Kim, K.-C. CFD and experiment validation on aerodynamic power output of small vawt with low tip speed ratio. J. Korean Soc. Mar. Eng. 2016, 40, 330–335. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Quantity/Type |
|---|---|
| Blade number | 4 |
| Blade profile | NACA 0018 |
| Chord length (c) | 0.1 m |
| Rotor radius (R) | 0.21 m |
| Blade height (H) | 0.54 m |
| Types | Total Elements | Y Plus |
|---|---|---|
| Mesh 1 | 295,180 | 5 |
| Mesh 2 | 501,340 | 1 |
| Mesh 3 | 683,980 | 1 |
| Feature | Quantity/Type |
|---|---|
| Wind tunnel type | Closed Circuit type |
| Test section | 5 m × 2.5 m × 20 m |
| Wind velocity range | 0.5–30 m/s |
| Turbulence intensity | 1.5% or less |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Q.; Liu, X.; Ji, H.S.; Kim, K.C.; Yang, B. Aerodynamic Analysis of a Helical Vertical Axis Wind Turbine. Energies 2017, 10, 575. https://doi.org/10.3390/en10040575
Cheng Q, Liu X, Ji HS, Kim KC, Yang B. Aerodynamic Analysis of a Helical Vertical Axis Wind Turbine. Energies. 2017; 10(4):575. https://doi.org/10.3390/en10040575
Chicago/Turabian StyleCheng, Qian, Xiaolan Liu, Ho Seong Ji, Kyung Chun Kim, and Bo Yang. 2017. "Aerodynamic Analysis of a Helical Vertical Axis Wind Turbine" Energies 10, no. 4: 575. https://doi.org/10.3390/en10040575
APA StyleCheng, Q., Liu, X., Ji, H. S., Kim, K. C., & Yang, B. (2017). Aerodynamic Analysis of a Helical Vertical Axis Wind Turbine. Energies, 10(4), 575. https://doi.org/10.3390/en10040575