Multi-Time Scale Coordinated Scheduling Strategy with Distributed Power Flow Controllers for Minimizing Wind Power Spillage


Abstract
1. Introduction
- (1)
- High-precision wind power prediction methods: reduce wind power forecast error and alleviate the deviation of generation scheduling.
- (2)
- Multi-energy coordinated scheduling solution: combine other power supplies or storages for optimal scheduling considering their regulatory characteristics.
- (3)
- Demand response: encourage users to participate in power system scheduling and utilize their flexibility potential to cope with the uncertainty of wind power.
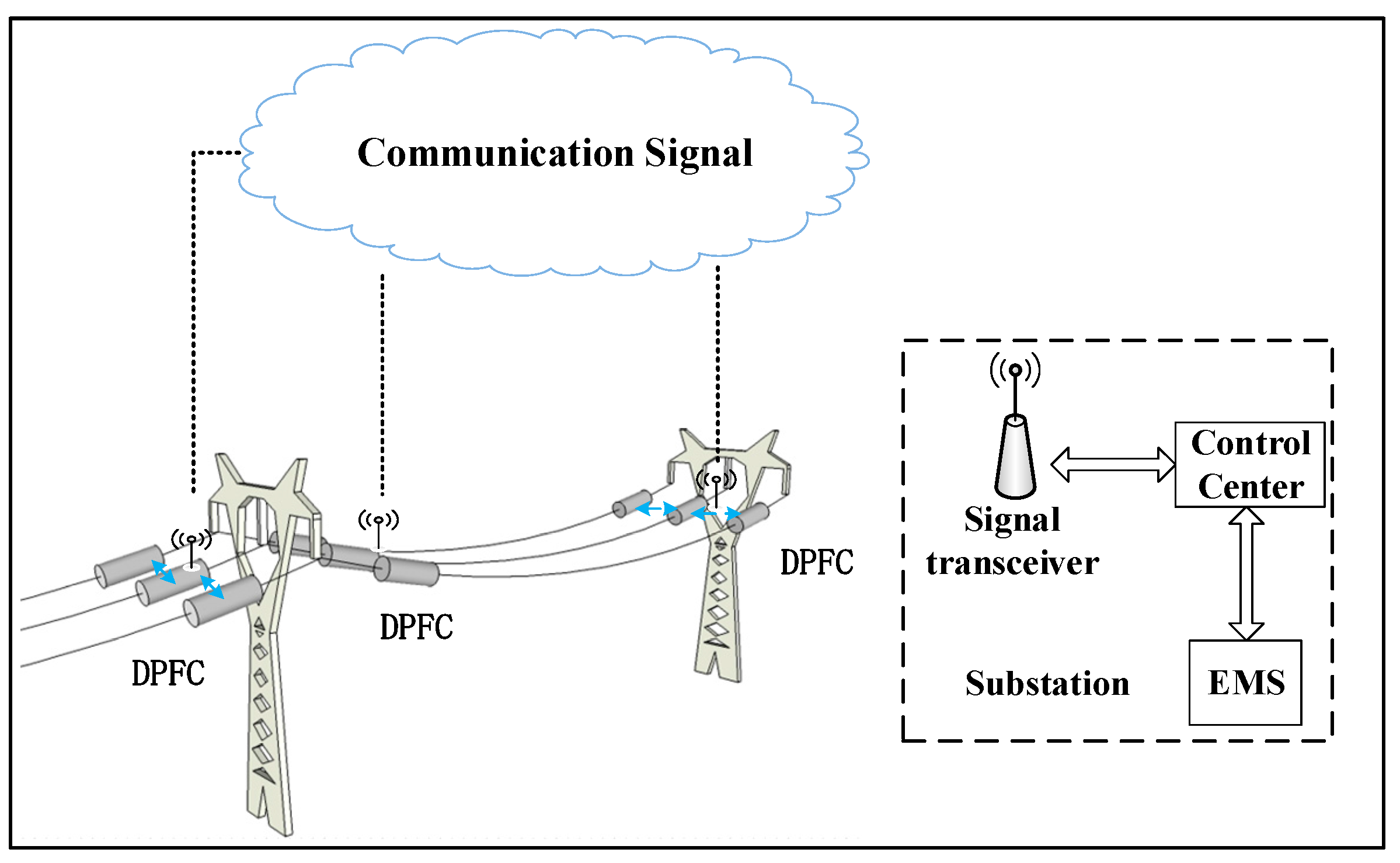
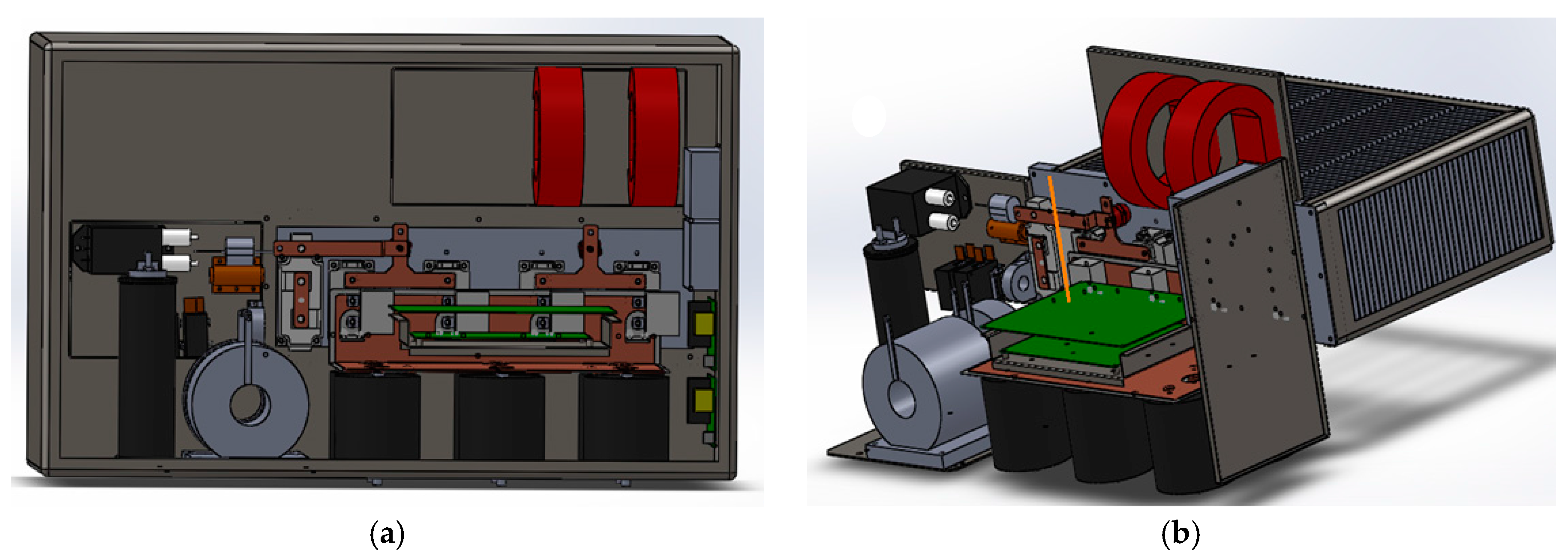
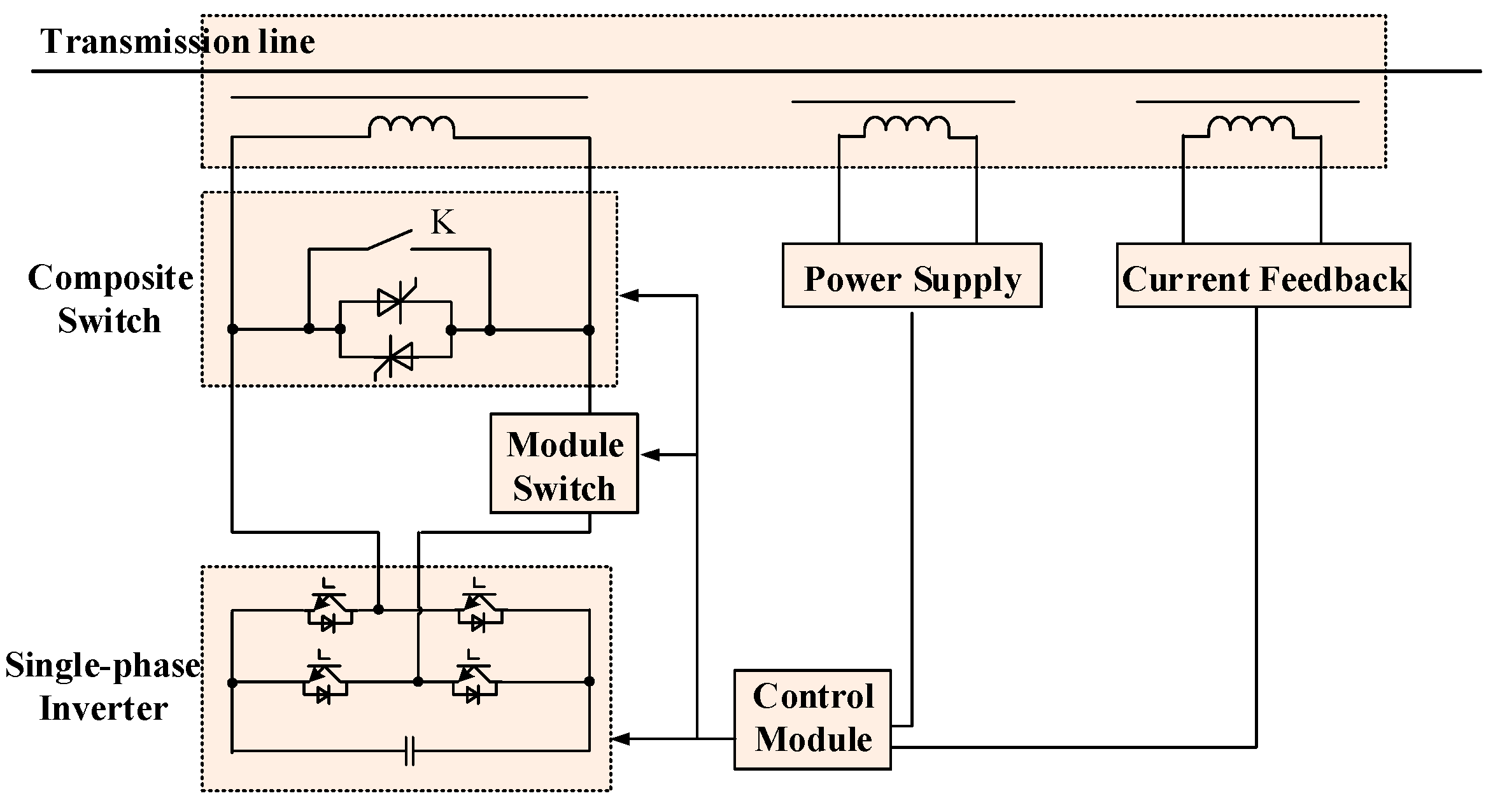
2. Structure and Mathematic Model of DPFC
2.1. Structure of DPFC
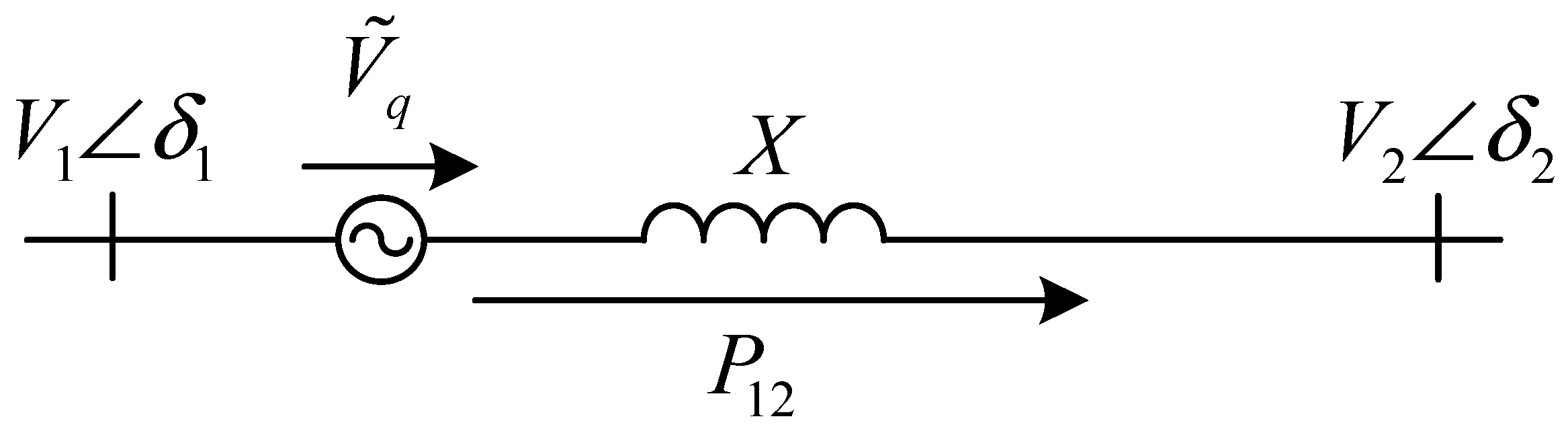
2.2. Linear Mathematic Model of DPFC
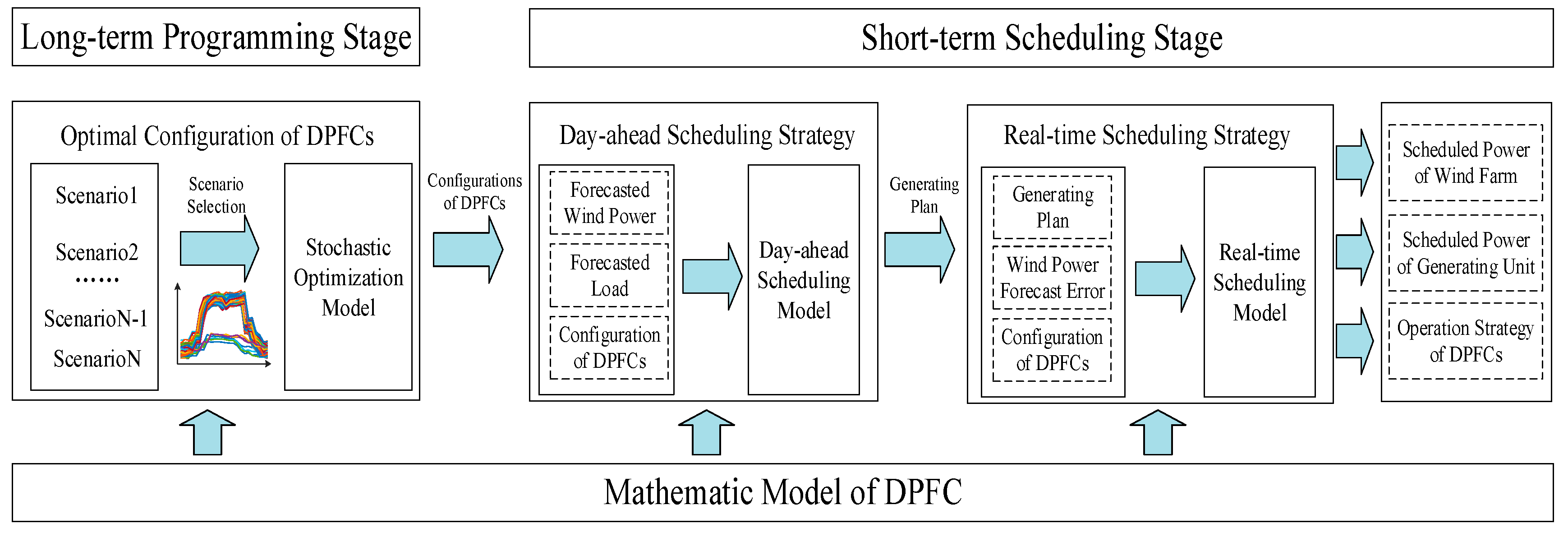
3. Problem Formulation
3.1. Stochastic Programming Model of DPFC
3.1.1. Objective Function
3.1.2. Constraints
- (1)
- Power Balance Constraints for Each Bus:where is real power flow through line k at period t in scenario s; is the active power consumption by load d at period t; and are set of lines specified as to and from bus n, respectively.
- (2)
- Line Power Flows Equations:where is voltage angle of bus n at period t in scenario s; is injected voltage of DPFC in line k at period t in scenario s; Bk is susceptibility of line k.
- (3)
- Generation Units Constraints:where is forecast value of wind farm w at period t in scenario s; and are upper and lower limits on the active power of generating unit g; is scheduled spinning reserve for unit g at period t in scenario s; is maximum hourly ramp rate of unit g.
- (4)
- Reserve Constraints:where is the required level of spinning reserve at period t; is ratio of hourly ramp rate and short-time ramp rate.
- (5)
- Network Security Constraints:where is the thermal limit of transmission line k.
- (6)
- DPFC’s Constraints,
- (a)
- installation number constraints of DPFC:where Nk is the number of DPFC installed on line k; uk is a binary parameter that specifies whether it is feasible to install DPFCs on line k; NT is the maximum total number of DPFCs available to be installed in the system; and are the maximum and minimum number of DPFCs installed on the line k. Since DPFCs are directly installed on the transmission lines, is affected by the length of the line, the bearing capacity of the tower and the weight of the DPFC.
- (b)
- operation constraints of DPFC:and are upper and lower limits on voltage injected by DPFC installed on the line k which can be calculated using the following equations:where SDPFC is the capacity of each DPFC; Ik.max is the thermal limit of line k.
3.2. Day-Ahead Scheduling Model
3.2.1. Objective Function
3.2.2. Constraints
3.3. Real-Time Scheduling Model
3.3.1. Objective Function
3.3.2. Constraints
- (1)
- the final scheduled power of generating units;
- (2)
- the final scheduled power of wind farms;
- (3)
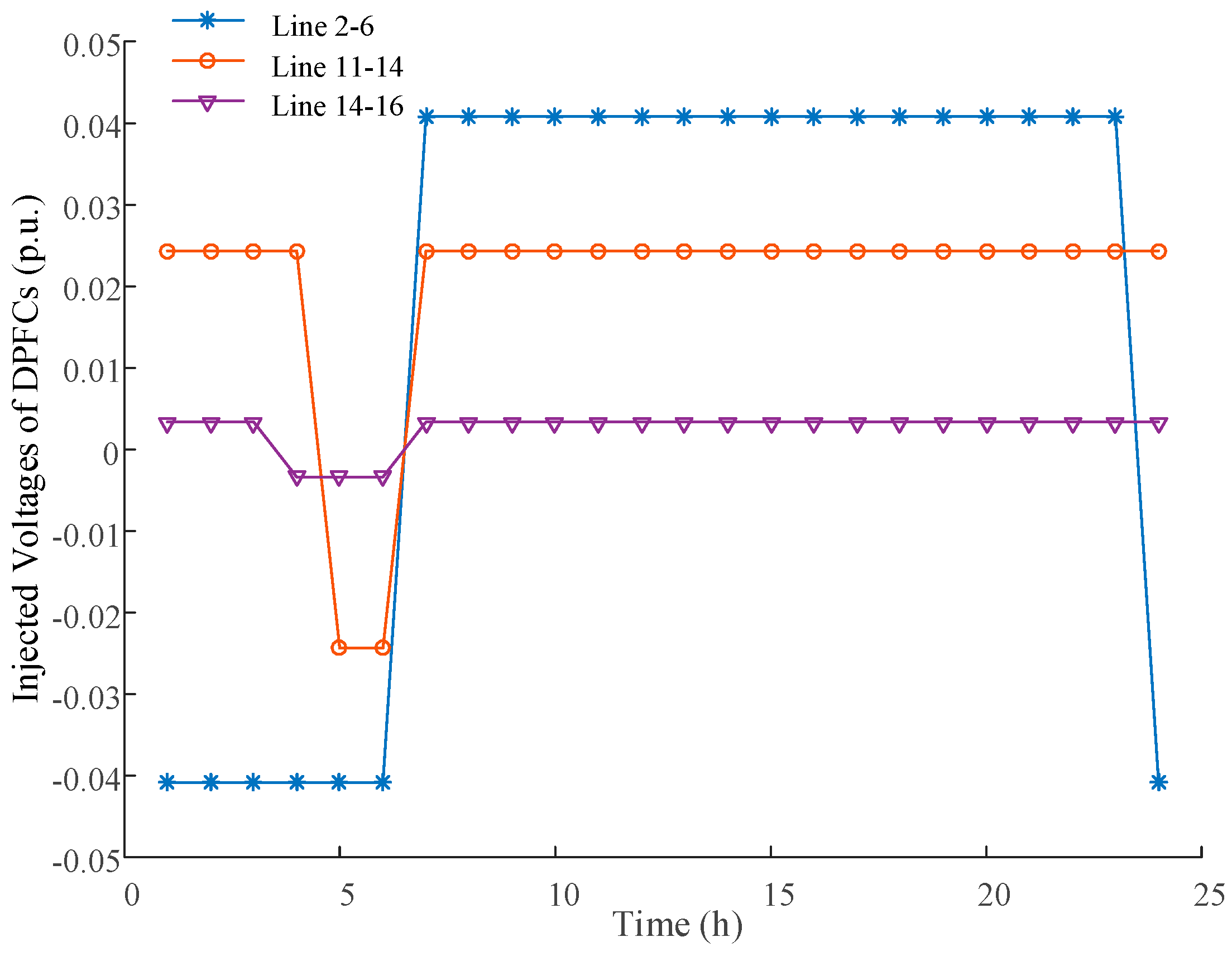
- the real-time operation control strategy of DPFCs.
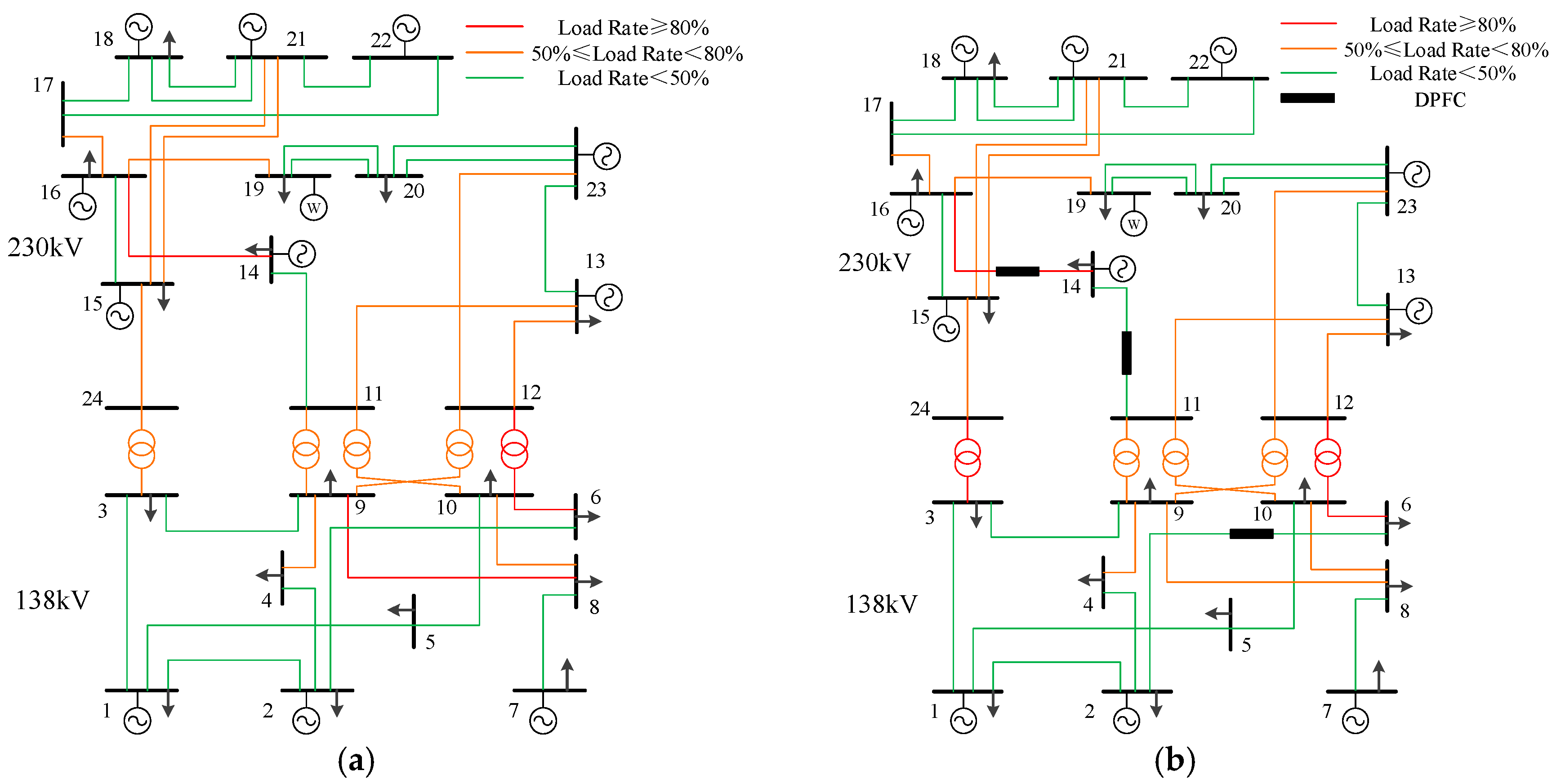
4. Simulation Results
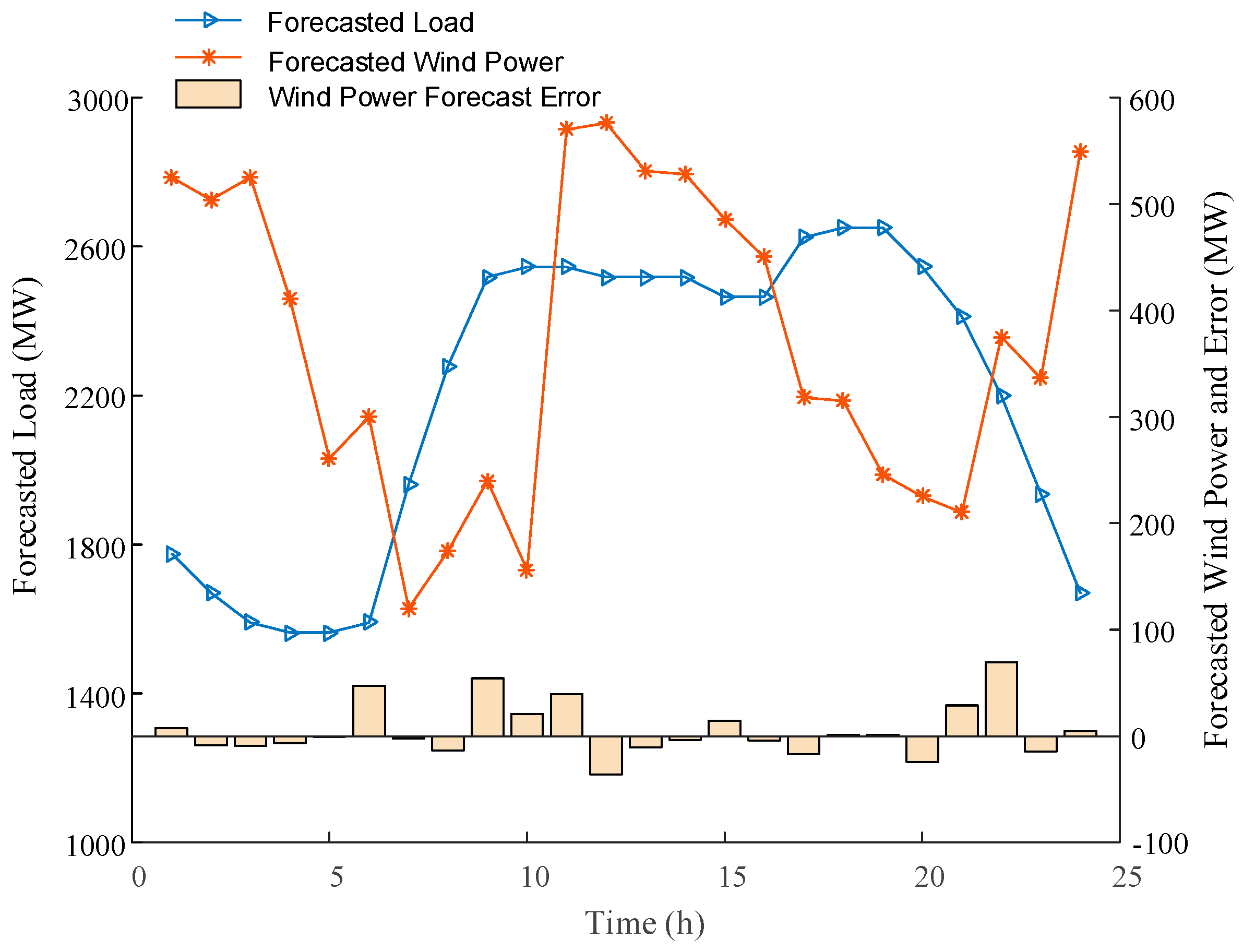
4.1. Data
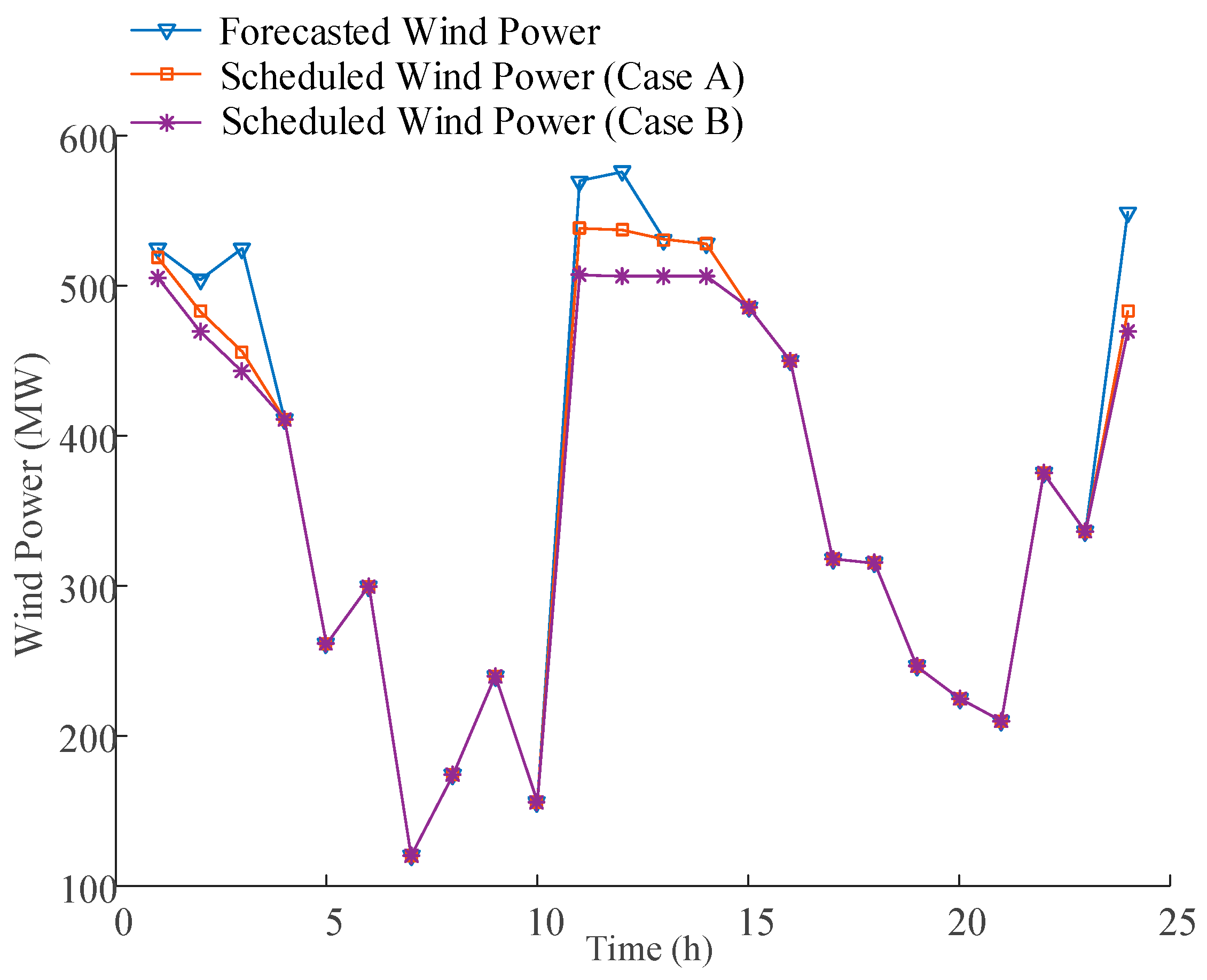
- Case A: 150 DPFCs are installed by the proposed method.
- Case B: No DPFCs in the system.
4.2. Optimal Configuration of DPFC
4.3. Results of Day-Ahead Scheduling
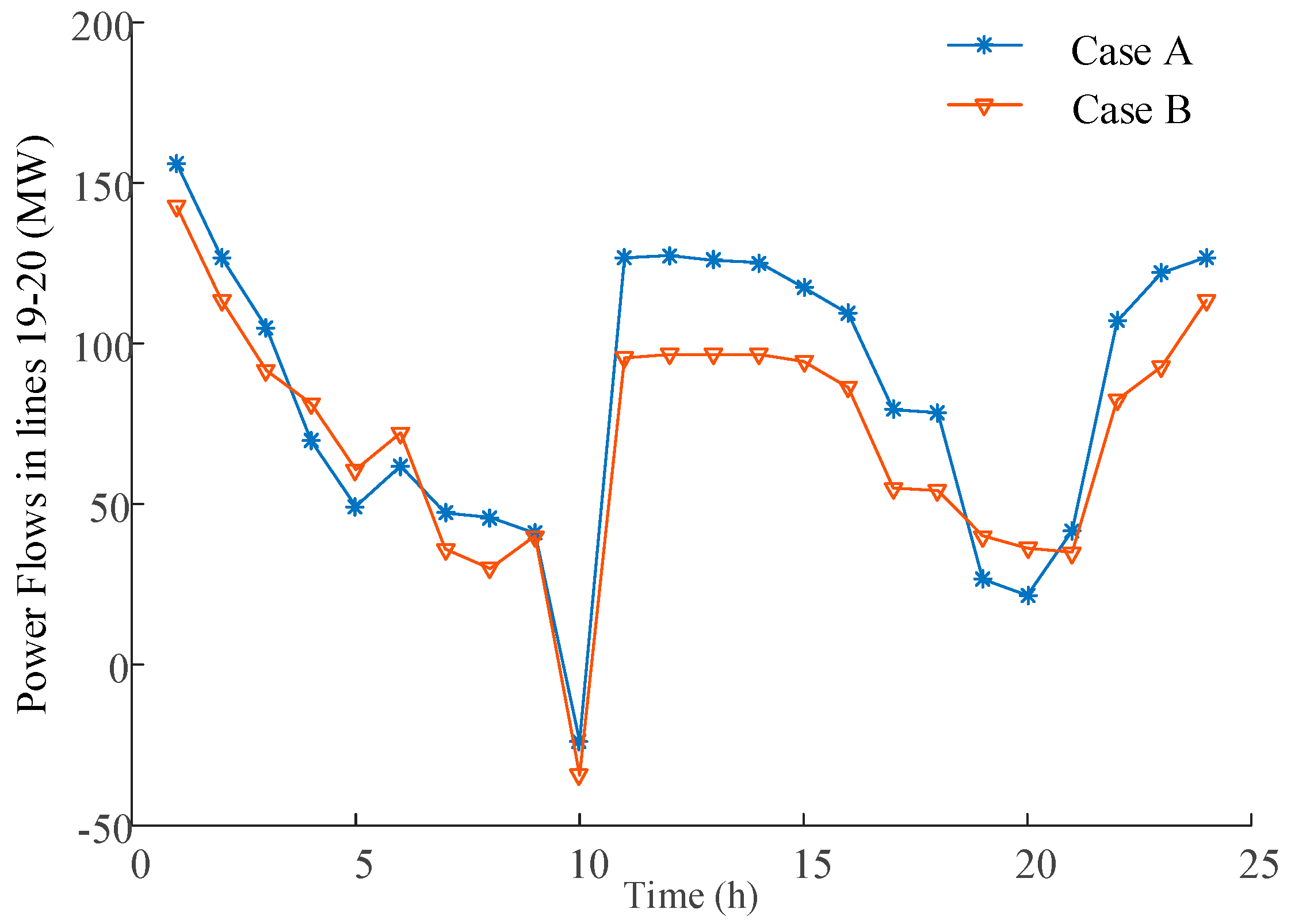
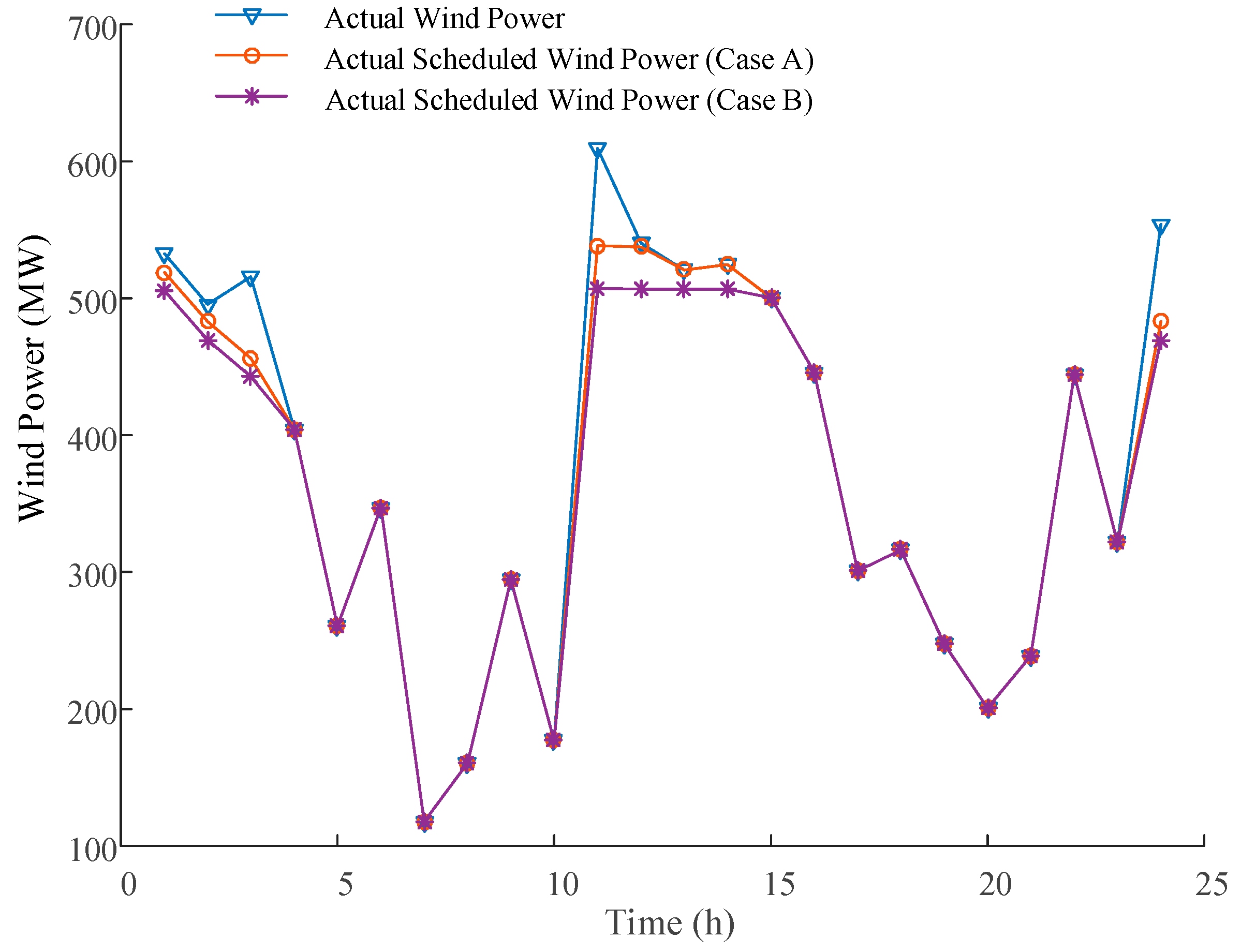
4.4. Results of Real-Time Scheduling
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bruninx, K.; Delarue, E. A statistical description of the error on wind power forecasts for probabilistic reserve sizing. IEEE Trans. Sustain. Energy 2014, 5, 995–1002. [Google Scholar] [CrossRef]
- Li, P.; Guan, X.; Wu, J.; Zhou, X. Modeling dynamic spatial correlations of geographically distributed wind farms and constructing ellipsoidal uncertainty sets for optimization-based generation scheduling. IEEE Trans. Sustain. Energy 2015, 6, 1594–1605. [Google Scholar] [CrossRef]
- Lima, M.; Carvalho, P.; Carneiro, T.; Carneiro, T.; Leite, J.; Neto, L.; Rodrigues, G. Portfolio theory applied to solar and wind resources forecast. IET Renew. Power Gener. 2017, 11, 973–978. [Google Scholar] [CrossRef]
- Doostizadeh, M.; Aminifar, F.; Ghasemi, H.; Lesani, H. Energy and reserve scheduling under wind power uncertainty: An adjustable interval approach. IEEE Trans. Smart Grid 2016, 7, 2943–2952. [Google Scholar] [CrossRef]
- Zhang, N.; Kang, C.; Xia, Q.; Liang, J. Modeling conditional forecast error for wind power in generation scheduling. IEEE Trans. Power Syst. 2014, 29, 1316–1324. [Google Scholar] [CrossRef]
- Kargarian, A.; Hug, G.; Mohammadi, J. A multi-time scale co-optimization method for sizing of energy storage and fast-ramping generation. IEEE Trans. Sustain. Energy 2016, 7, 1351–1361. [Google Scholar] [CrossRef]
- Nikoobakht, A.; Mardaneh, M.; Aghaei, J.; Guerrero-Mestre, V.; Contreras, J. Flexible power system operation accommodating uncertain wind power generation using transmission topology control: An improved linearised AC SCUC model. IET Gener. Transm. Dis. 2017, 11, 142–153. [Google Scholar] [CrossRef]
- Liu, M.; Quilumba, F.; Lee, W. Dispatch scheduling for a wind farm with hybrid energy storage based on wind and LMP forecasting. IEEE Trans. Ind. Appl. 2015, 51, 1970–1977. [Google Scholar] [CrossRef]
- Bitaraf, H.; Rahman, S.; Pipattanasomporn, M. Sizing energy storage to mitigate wind power forecast error impacts by signal processing techniques. IEEE Trans. Sustain. Energy 2015, 6, 1457–1465. [Google Scholar] [CrossRef]
- Yuan, R.; Ye, J.; Lei, J.; Li, T. Integrated combined heat and power system dispatch considering electrical and thermal energy storage. Energies 2016, 9, 474. [Google Scholar] [CrossRef]
- Rong, S.; Li, Z.; Li, W. Investigation of the promotion of wind power consumption using the thermal-electric decoupling techniques. Energies 2015, 8, 8613–8629. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, N. Coordinated operation of concentrated solar power and wind resources for the provision of energy and reserve services. IEEE Trans. Power Syst. 2017, 32, 1260–1271. [Google Scholar] [CrossRef]
- Hozouri, M.; Abbaspour, A.; Fotuhi-Firuzabad, M.; Moeini-Aghtaie, M. On the use of pumped storage for wind energy maximization in transmission-constrained power systems. IEEE Trans. Power Syst. 2015, 30, 1017–1025. [Google Scholar] [CrossRef]
- Pourmousavi, S.; Patrick, S.; Nehrir, M. Real-time demand response through aggregate electric water heaters for load shifting and balancing wind generation. IEEE Trans. Smart Grid 2014, 5, 769–778. [Google Scholar] [CrossRef]
- Ali, M.; Degefa, M.; Humayun, M.; Lehtonen, M. Increased utilization of wind generation by coordinating the demand response and real-time thermal rating. IEEE Trans. Power Syst. 2016, 31, 3737–3746. [Google Scholar] [CrossRef]
- Daraeepour, A.; Kazempour, S.; Patiño-Echeverri, D.; Conejo, A. Strategic demand-side response to wind power integration. IEEE Trans. Power Syst. 2015, 31, 3495–3505. [Google Scholar] [CrossRef]
- Yang, S.; Zeng, D.; Ding, H.; Yao, J.; Wang, K.; Li, Y. Multi-objective demand response model considering the probabilistic characteristic of price elastic load. Energies 2016, 9, 80. [Google Scholar] [CrossRef]
- Sahraei-Ardakani, M.; Blumsack, S. Transfer capability improvement through market-based operation of series FACTS devices. IEEE Trans. Power Syst. 2016, 31, 3702–3714. [Google Scholar] [CrossRef]
- Ullah, I.; Gawlik, W.; Palensky, P. Analysis of power network for line reactance variation to improve total transmission capacity. Energies 2016, 9, 936. [Google Scholar] [CrossRef]
- Divan, D.; Brumsickle, W.; Schneider, R.; Kranz, B.; Gascoigne, R.; Bradshaw, D. A distributed static series compensator system for realizing active power flow control on existing power lines. IEEE Trans. Power Deliv. 2006, 22, 642–649. [Google Scholar] [CrossRef]
- Nasri, A.; Conejo, A.J.; Kazempour, S.J.; Ghandhari, M. Minimizing wind power spillage using an OPF with FACTS devices. IEEE Trans. Power Syst. 2014, 29, 2150–2159. [Google Scholar] [CrossRef]
- Kapetanaki, A.; Levi, V.; Buhari, M.; Schachter, J. Maximization of wind energy utilization through corrective scheduling and FACTS deployment. IEEE Trans. Power Syst. 2017, 32, 4764–4773. [Google Scholar] [CrossRef]
- Elmitwally, A.; Eladl, A.; Morrow, J. Long-term economic model for allocation of FACTS devices in restructured power systems integrating wind generation. IET Gener. Transm. Dis. 2016, 10, 19–30. [Google Scholar] [CrossRef]
- Huo, Y.; Jiang, P.; Zhu, Y.; Feng, S.; Wu, X. Optimal Real-Time Scheduling of Wind Integrated Power System Presented with Storage and Wind Forecast Uncertainties. Energies 2015, 8, 1080–1100. [Google Scholar] [CrossRef]
- Su, H.; Gamal, A. Modeling and Analysis of the Role of Energy Storage for Renewable Integration: Power Balancing. IEEE Trans. Power Syst. 2013, 28, 4109–4117. [Google Scholar] [CrossRef]
- Subcommittee, P. IEEE reliability test system. IEEE Trans. Power Appl. Syst. 1979, 98, 2047–2054. [Google Scholar] [CrossRef]
- Conejo, A.; Carrion, M.; Morales, J. Appendix B 24-node system data. In Decision Making under Uncertainty in Electricity Markets; Springer Science + Business Media, LLC: New York, NY, USA, 2010; pp. 479–485. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum Injected Voltage | Minimum Injected Voltage | Line | |||
|---|---|---|---|---|---|
| V | pu | V | Pu | Voltage (kV) | Transmission Limit (MW) |
| 191.22 | 2.4 × 10−3 | −191.22 | −2.4 × 10−3 | 138 | 87.5 |
| 111.54 | 8.4 × 10−4 | −111.54 | −8.4 × 10−4 | 230 | 250 |
| Line | Number of DPFC | ||
|---|---|---|---|
| From Bus | To Bus | Length/Mile | |
| 2 | 6 | 50 | 51 |
| 11 | 14 | 29 | 87 |
| 14 | 16 | 27 | 12 |
| Sum | 150 | ||
| Cases | Wind Power Consumption (MWh) | Wind Power Consumption Percentage (%) | Total Periods of Wind Power Spillage | Operation Cost (Dollar) |
|---|---|---|---|---|
| Case A | 8839.48 | 97.45 | 5 | 26,774.72 |
| Case B | 8692.01 | 95.83 | 8 | 27,114.59 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Liu, Y.; Ning, J.; Zhao, J. Multi-Time Scale Coordinated Scheduling Strategy with Distributed Power Flow Controllers for Minimizing Wind Power Spillage. Energies 2017, 10, 1804. https://doi.org/10.3390/en10111804
Tang Y, Liu Y, Ning J, Zhao J. Multi-Time Scale Coordinated Scheduling Strategy with Distributed Power Flow Controllers for Minimizing Wind Power Spillage. Energies. 2017; 10(11):1804. https://doi.org/10.3390/en10111804
Chicago/Turabian StyleTang, Yi, Yuqian Liu, Jia Ning, and Jingbo Zhao. 2017. "Multi-Time Scale Coordinated Scheduling Strategy with Distributed Power Flow Controllers for Minimizing Wind Power Spillage" Energies 10, no. 11: 1804. https://doi.org/10.3390/en10111804
APA StyleTang, Y., Liu, Y., Ning, J., & Zhao, J. (2017). Multi-Time Scale Coordinated Scheduling Strategy with Distributed Power Flow Controllers for Minimizing Wind Power Spillage. Energies, 10(11), 1804. https://doi.org/10.3390/en10111804