
A Novel Supervisory Control Algorithm to Improve the Performance of a Real-Time PV Power-Hardware-In-Loop Simulator with Non-RTDS



Abstract
:1. Introduction
2. Mathematical Properties of a PV System for the PHIL Simulator
2.1. Characteristics of PV Cells for the PHIL Simulator
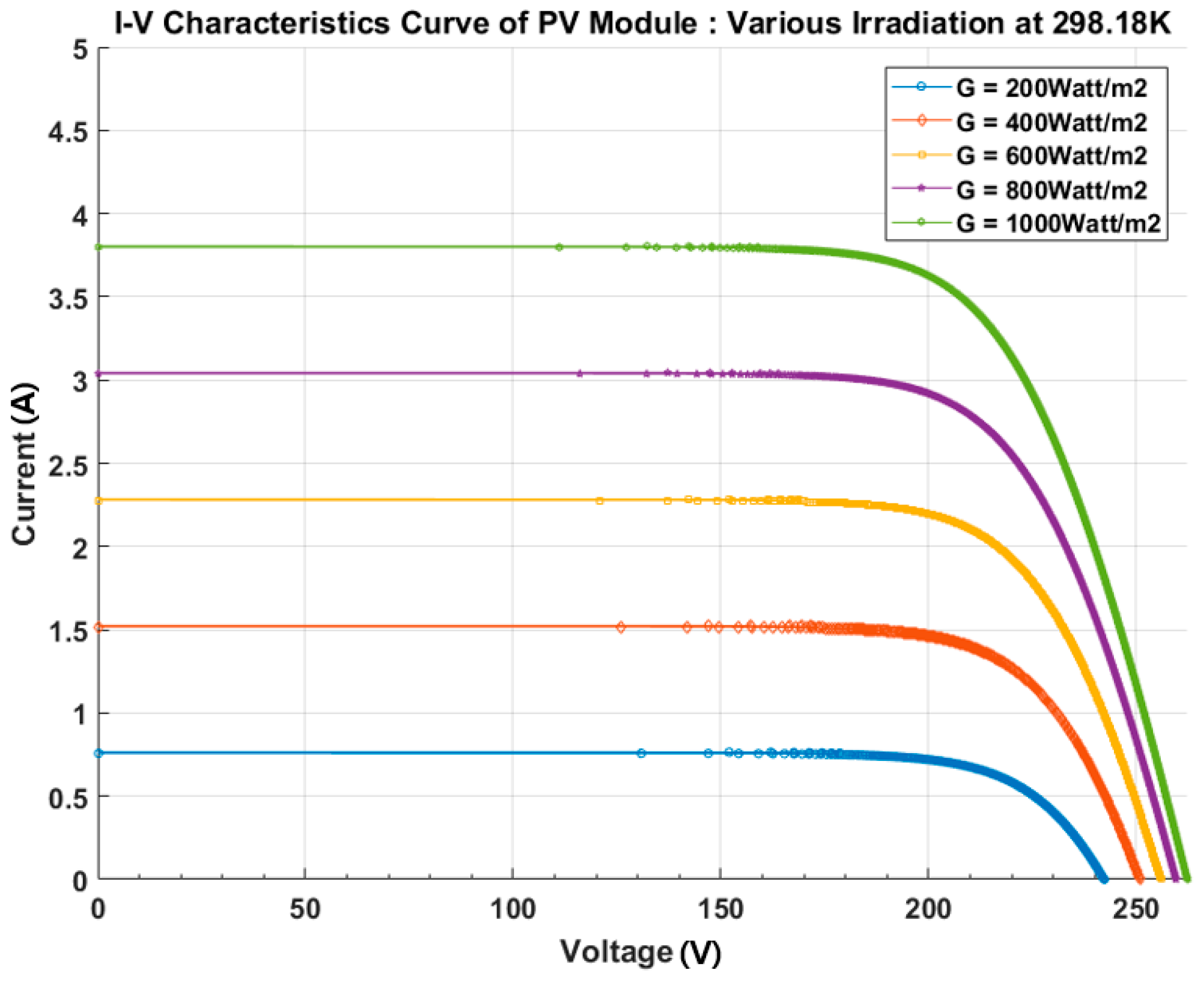
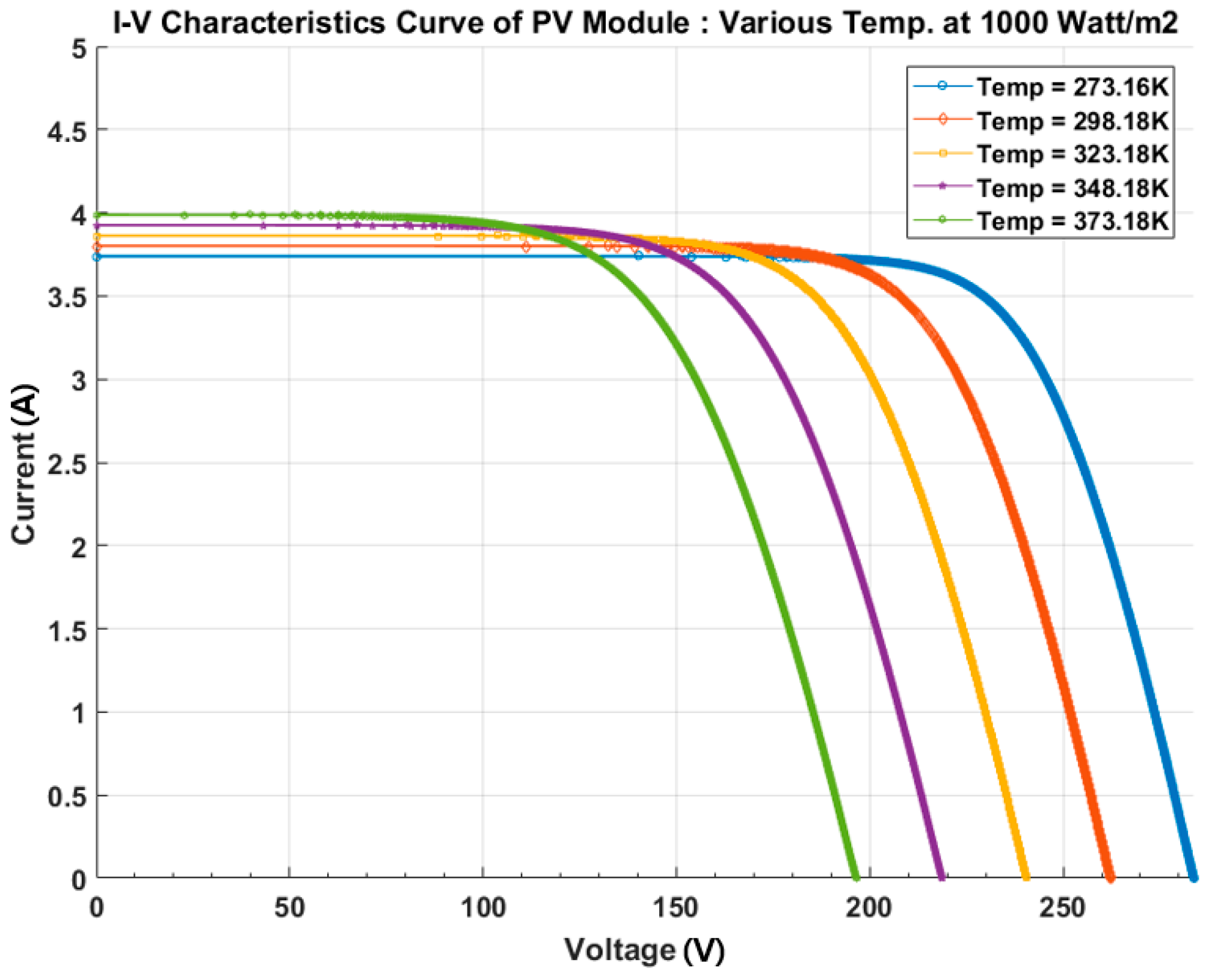
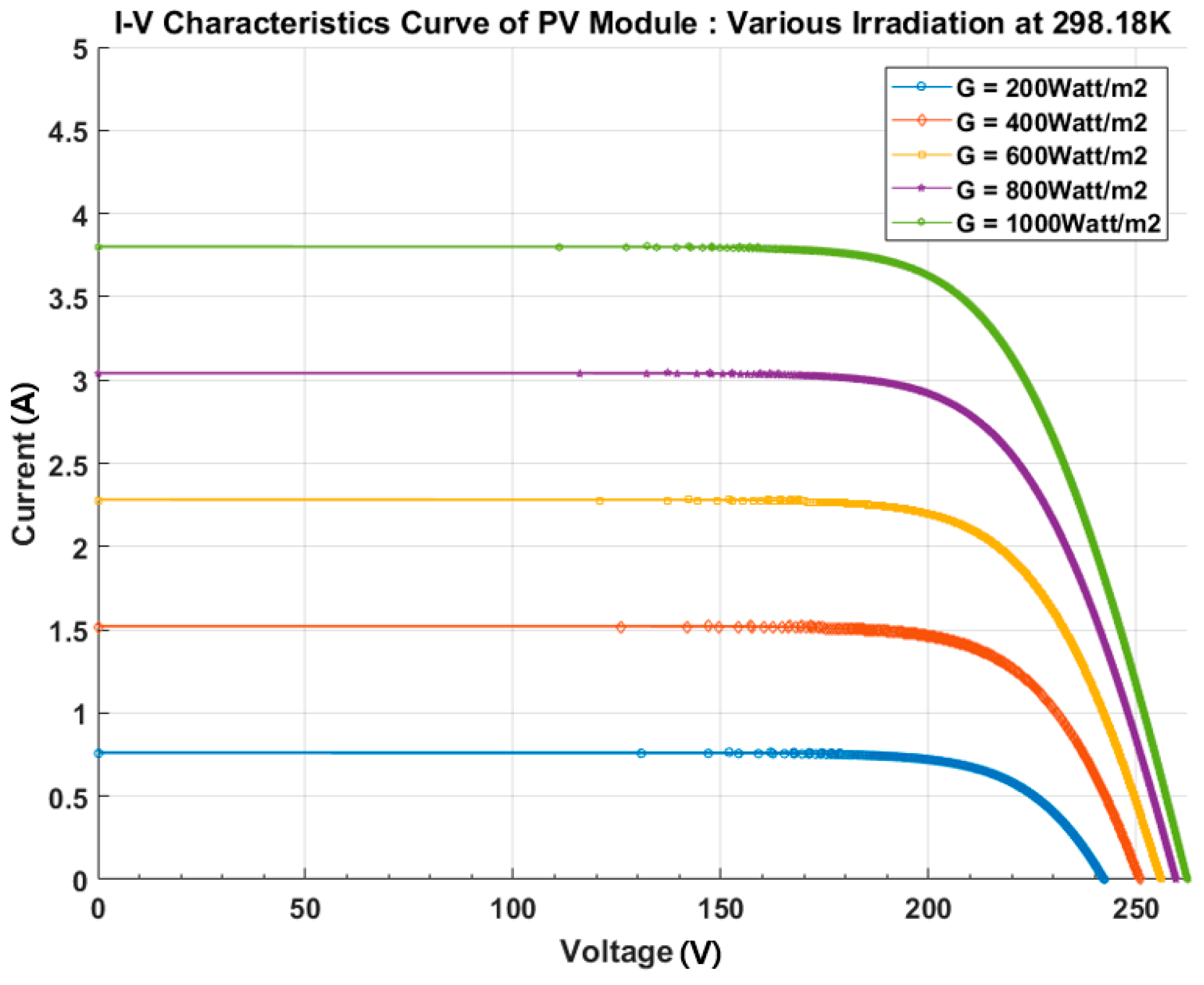
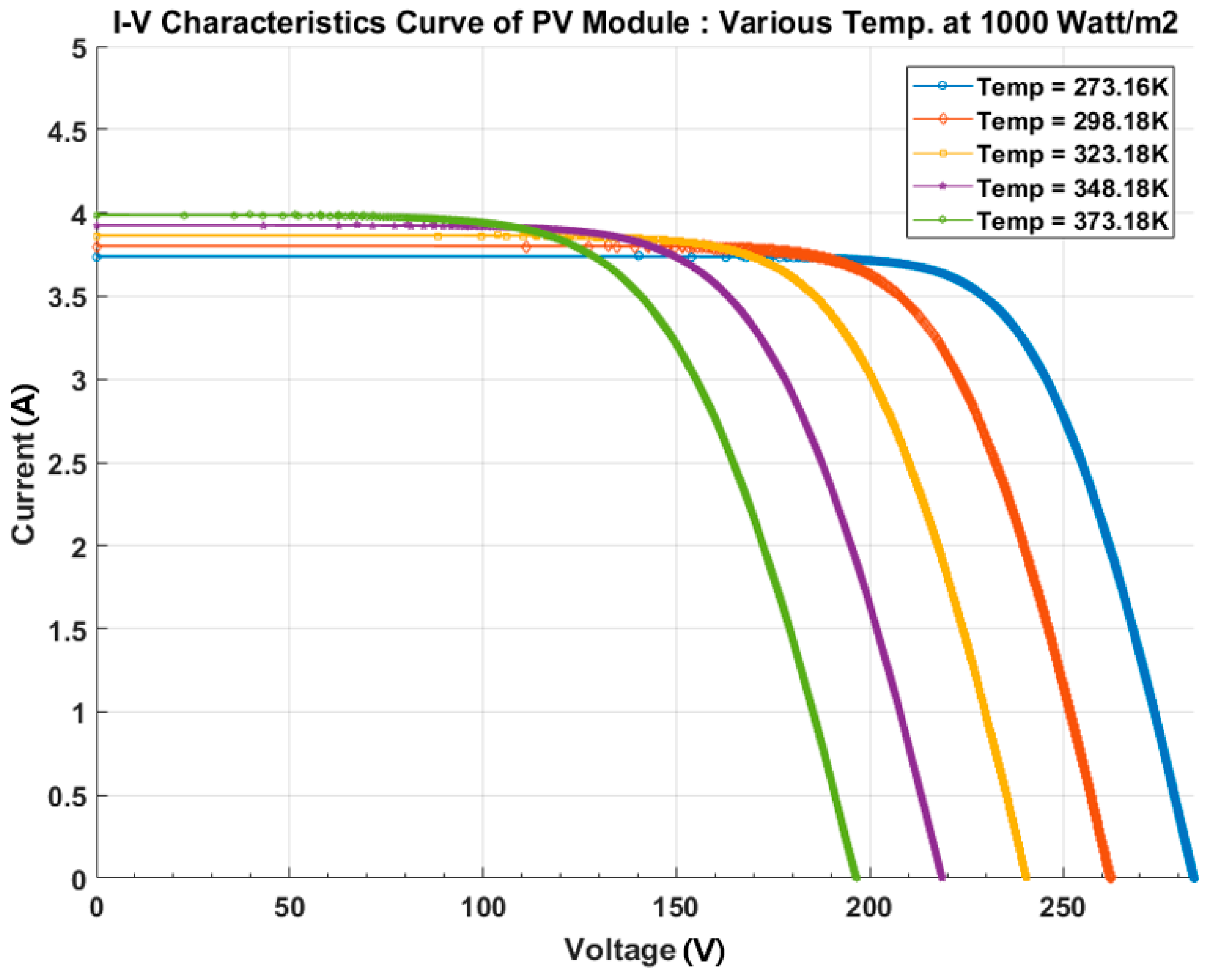
2.2. Characteristics of PV Modules for the PHIL Simulator
3. Advanced Operation Algorithm of a PV System for the PHIL Simulator
3.1. Conventional PV Simulator Operation Algorithm Used in RTDS
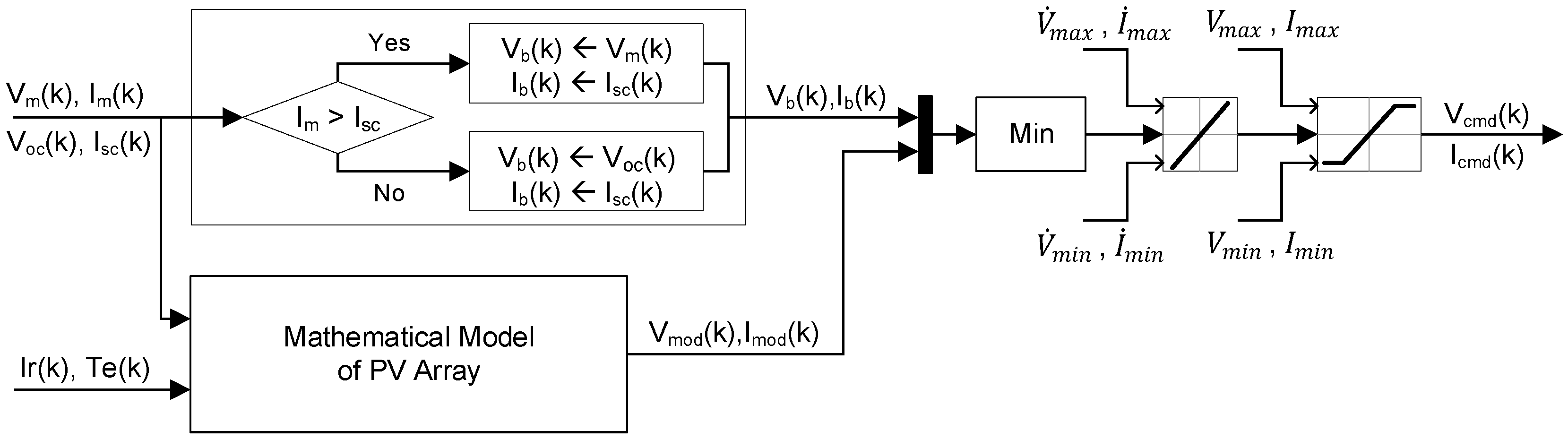
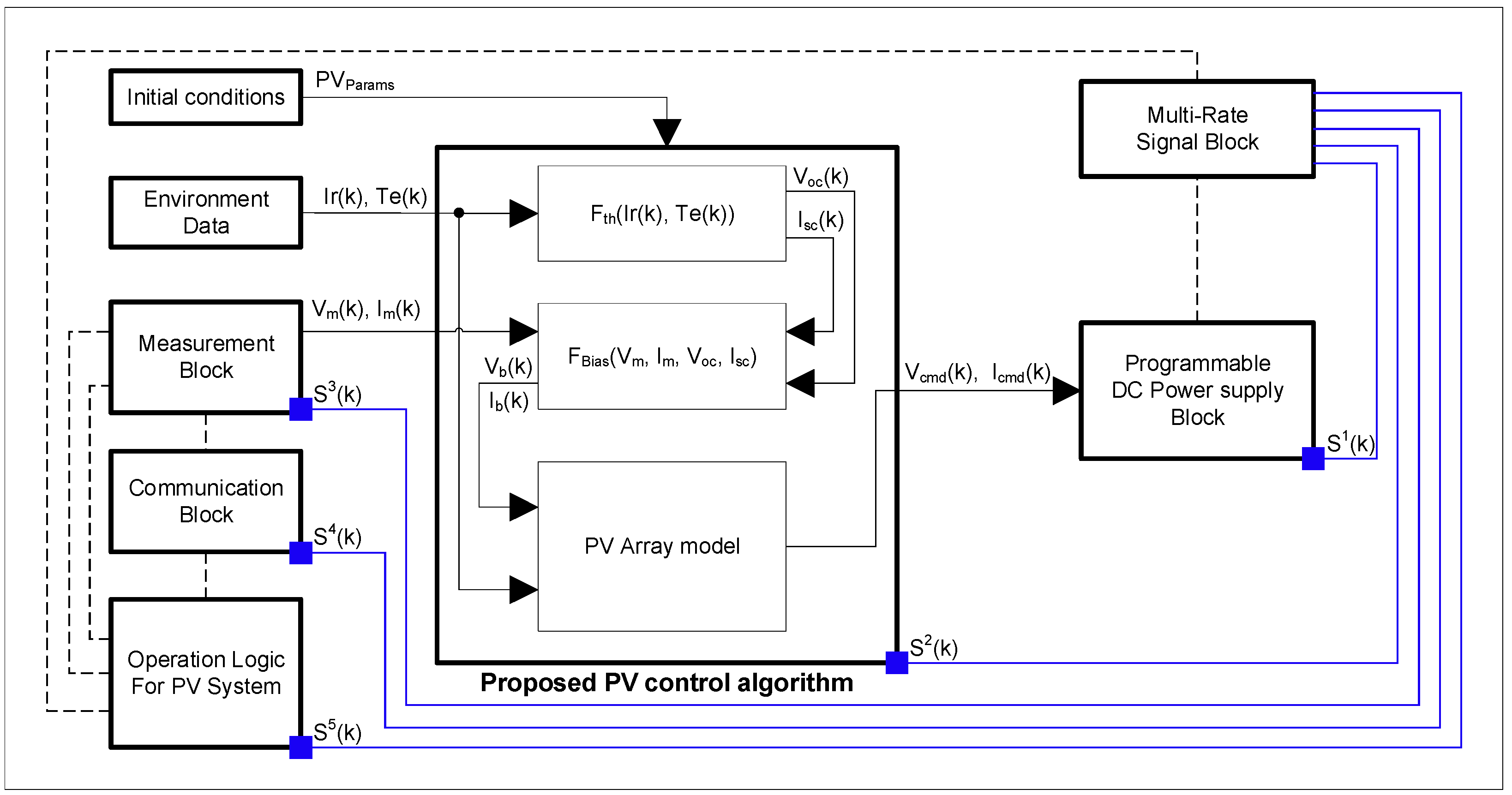
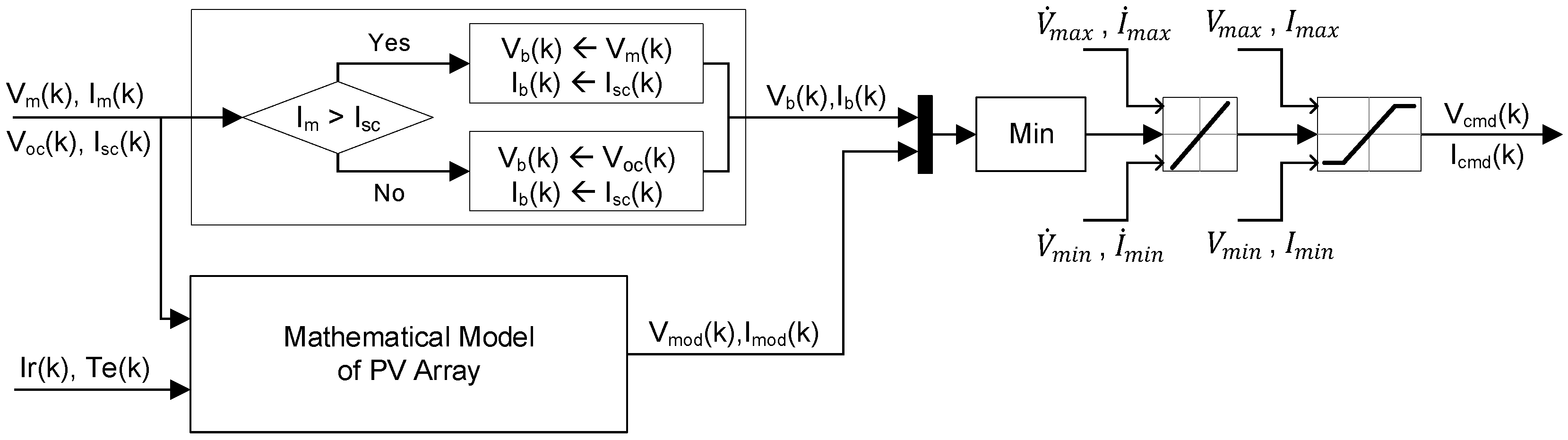
3.2. Proposed Supervisory Control Algorithm for the PV PHIL Simulator with Non-RTDS
4. Implementation of the PV PHIL Simulator
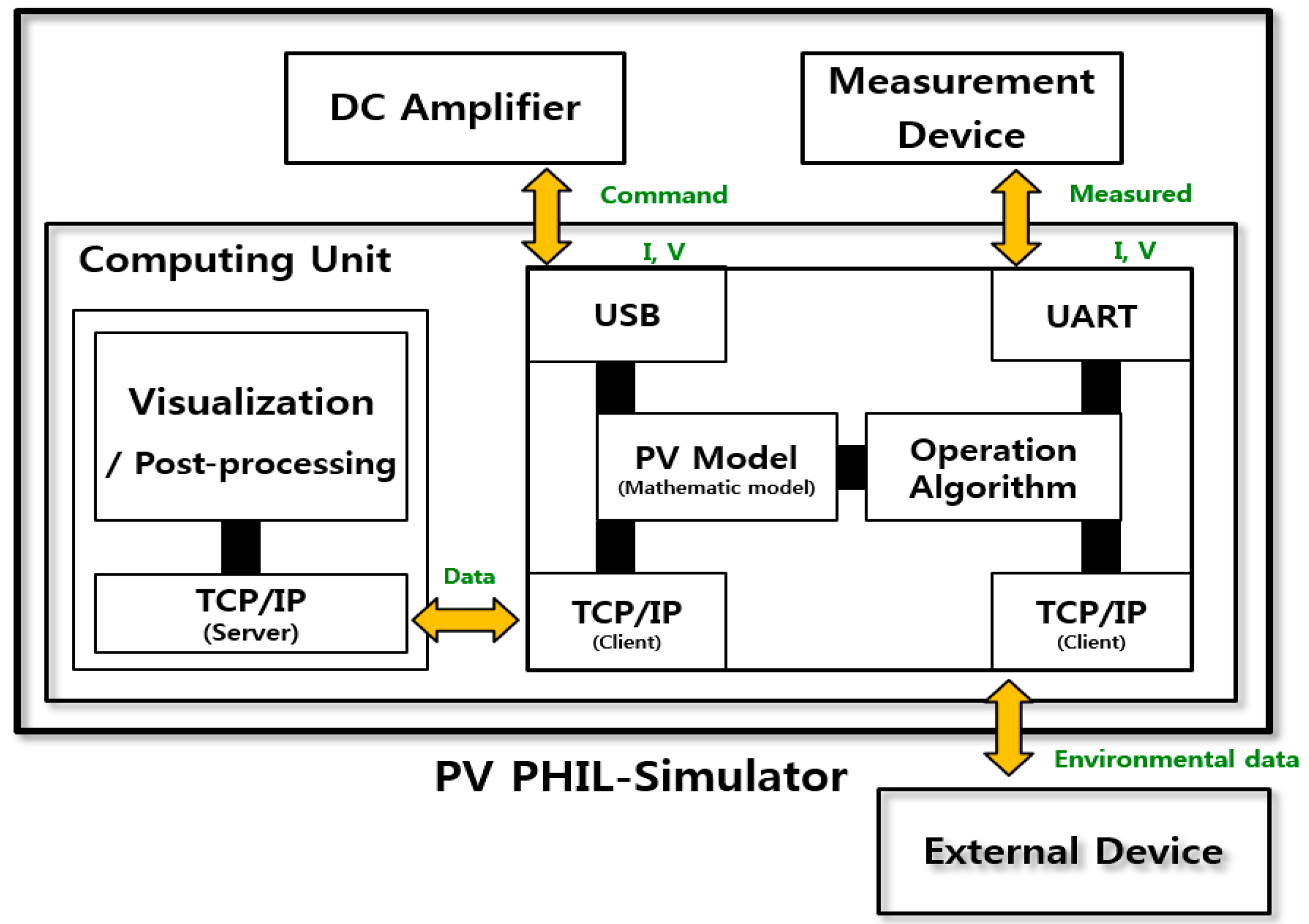
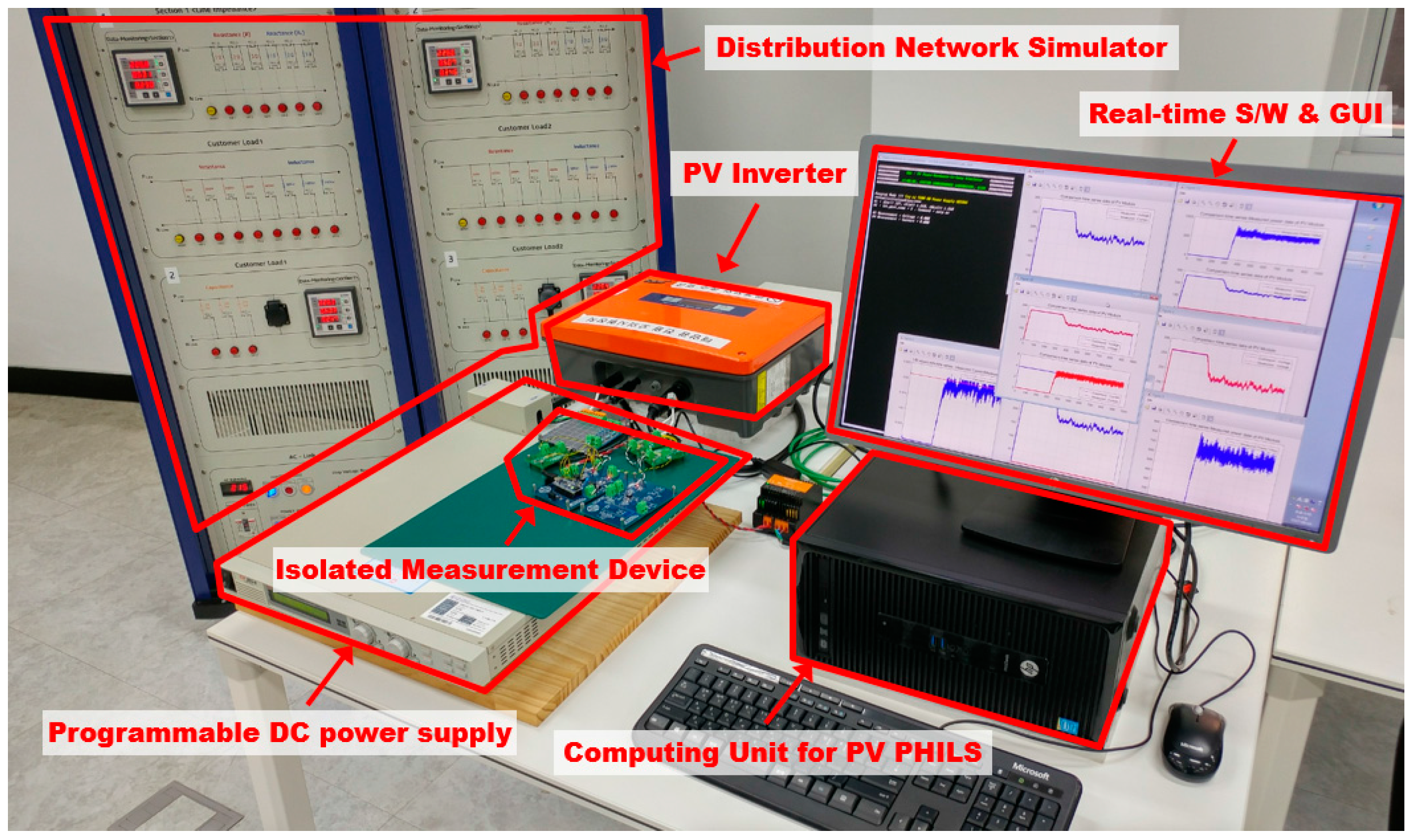
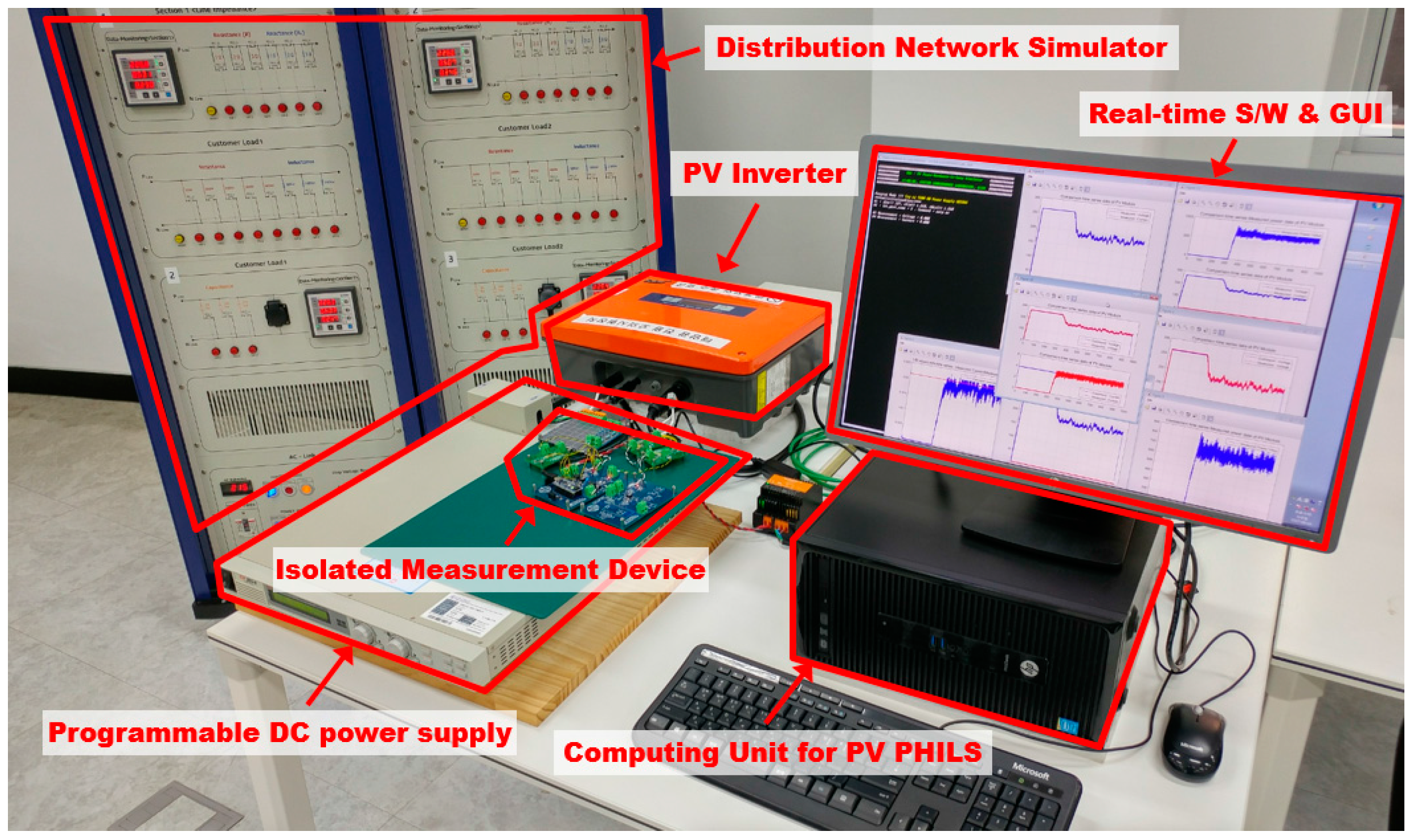
4.1. Architecture of the Proposed PV PHIL Simulator
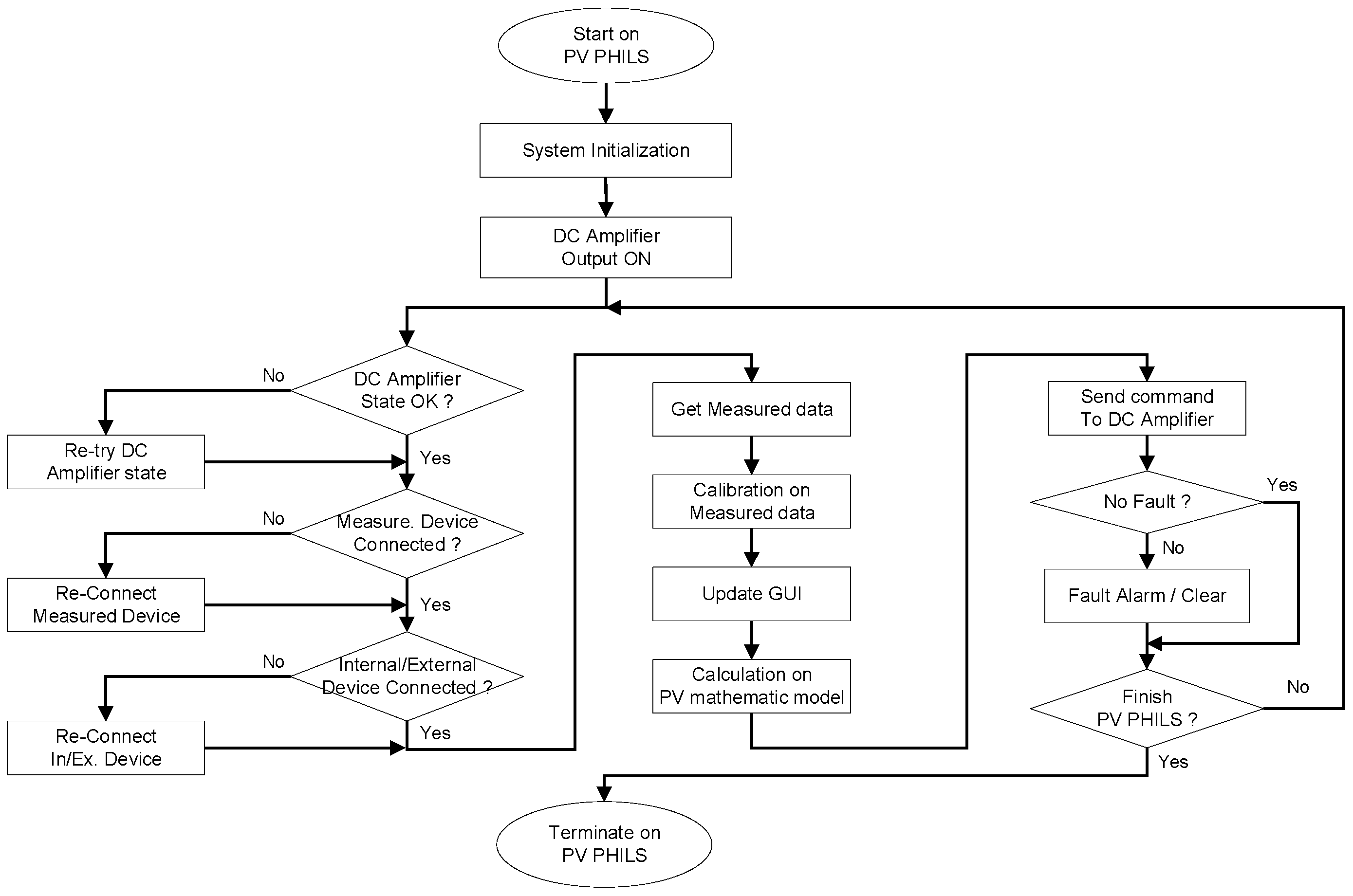
4.2. Integration and Conversion to Real-Time Processing
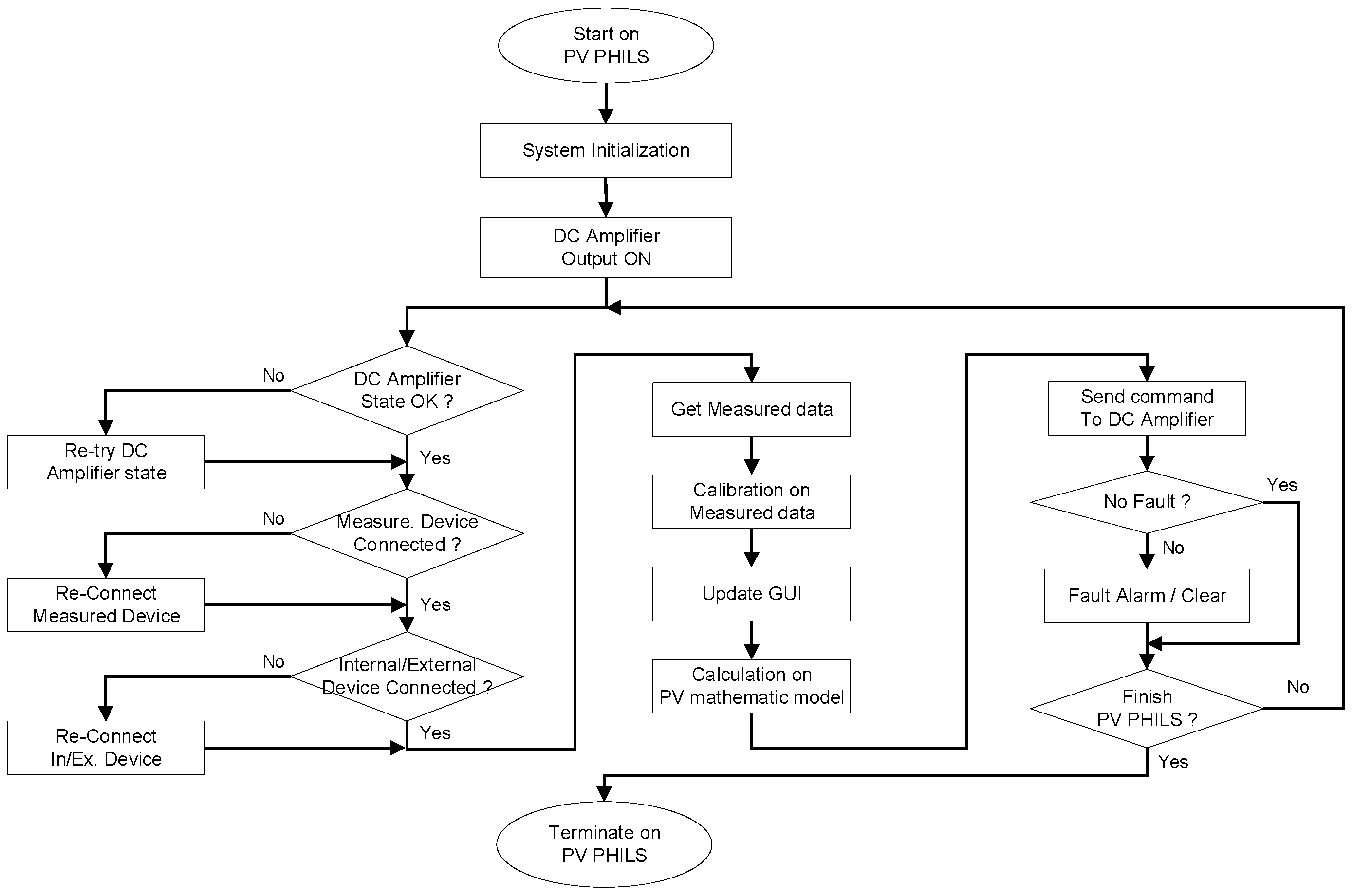
- Step 1.
- PV PHIL Simulator initialization procedure: Check the system’s parameters, Universal Asynchronous Receiver Transmitter (UART) and TCP/IP communication check, Initialization to the input and output;
- Step 2.
- Pre-start up procedure: Initial stage to DC power supply and Enable the output power;
- Step 3.
- Check the state of each component: Communication check and current state of DC power supply, isolated measurement device, and other peripheral devices;
- Step 4.
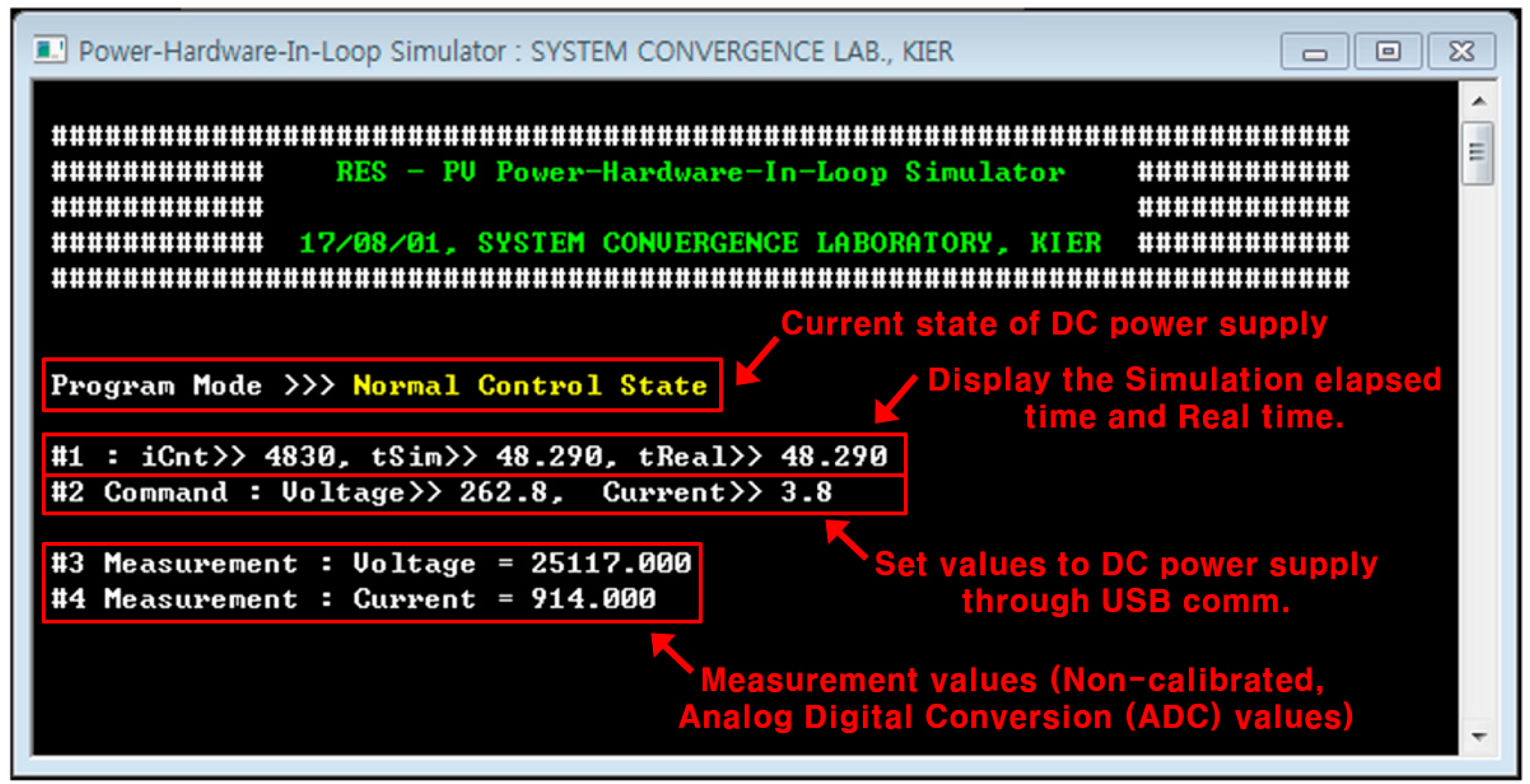
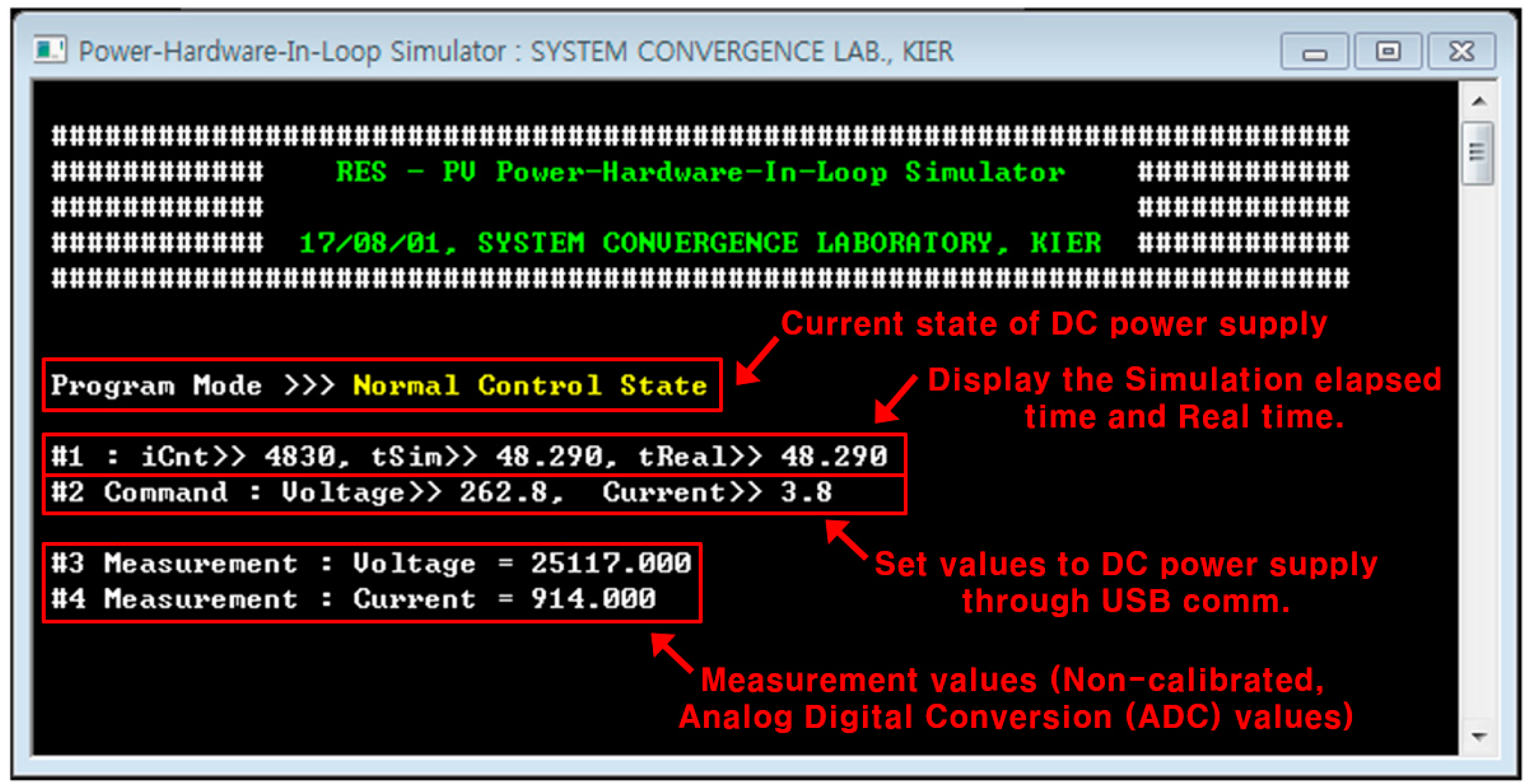
- Data processing: Acquisition of the measurement data, calibration process, and visualization to the graphical user interface (GUI);
- Step 5.
- Supervisory control algorithm: Computing the mathematical model of the PV system with environmental variables and measured data;
- Step 6.
- Execution process: Send the set values to the DC power supply and check for faults;
- Step 7.
- Repeat Step 3–Step 6 until the end of the test.
5. Performance Evaluation of the PV System for the PHIL Simulator
5.1. PV Array Simulation and Test Conditions
5.2. Simulation Analysis of Performance Characteristics
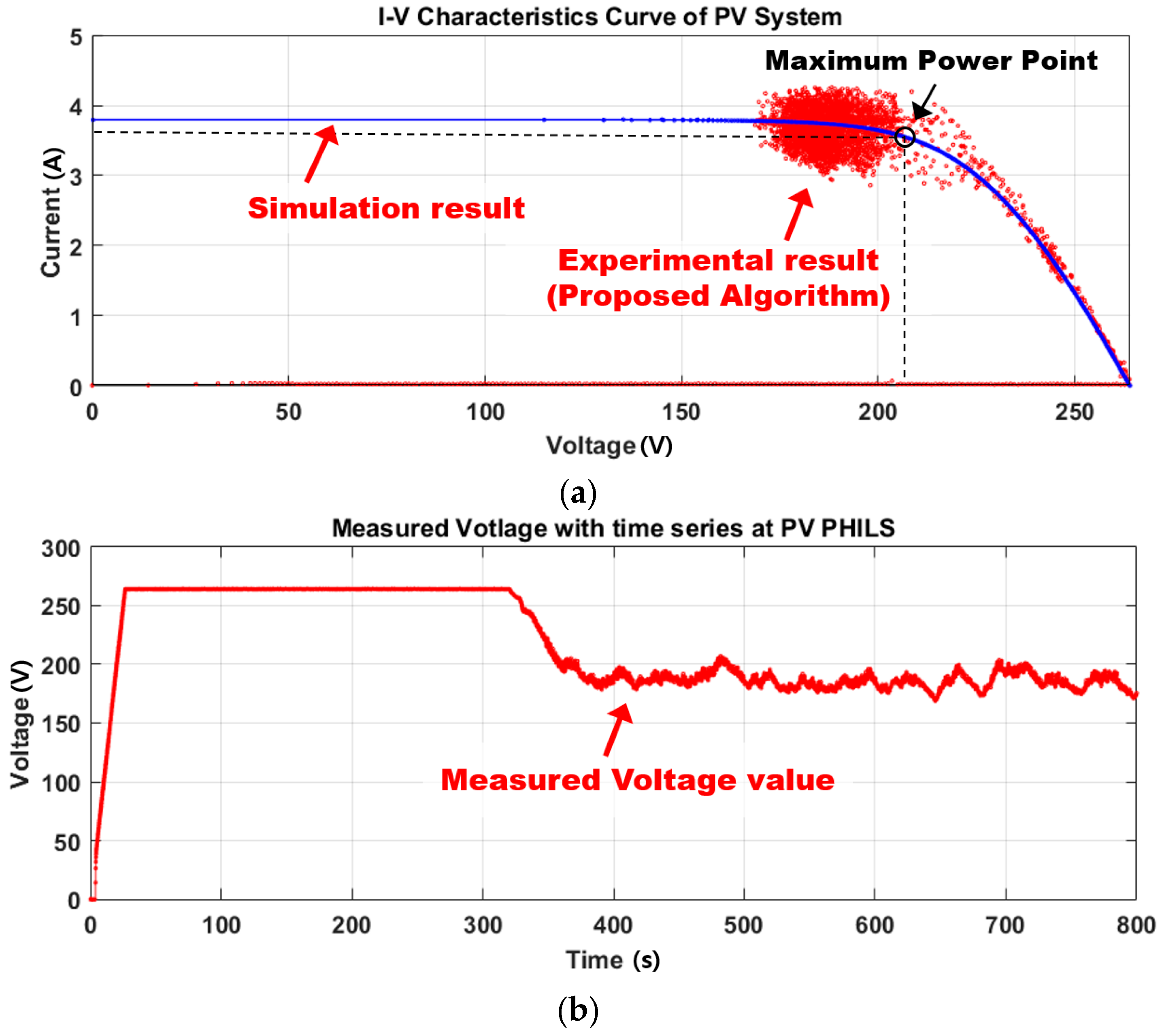
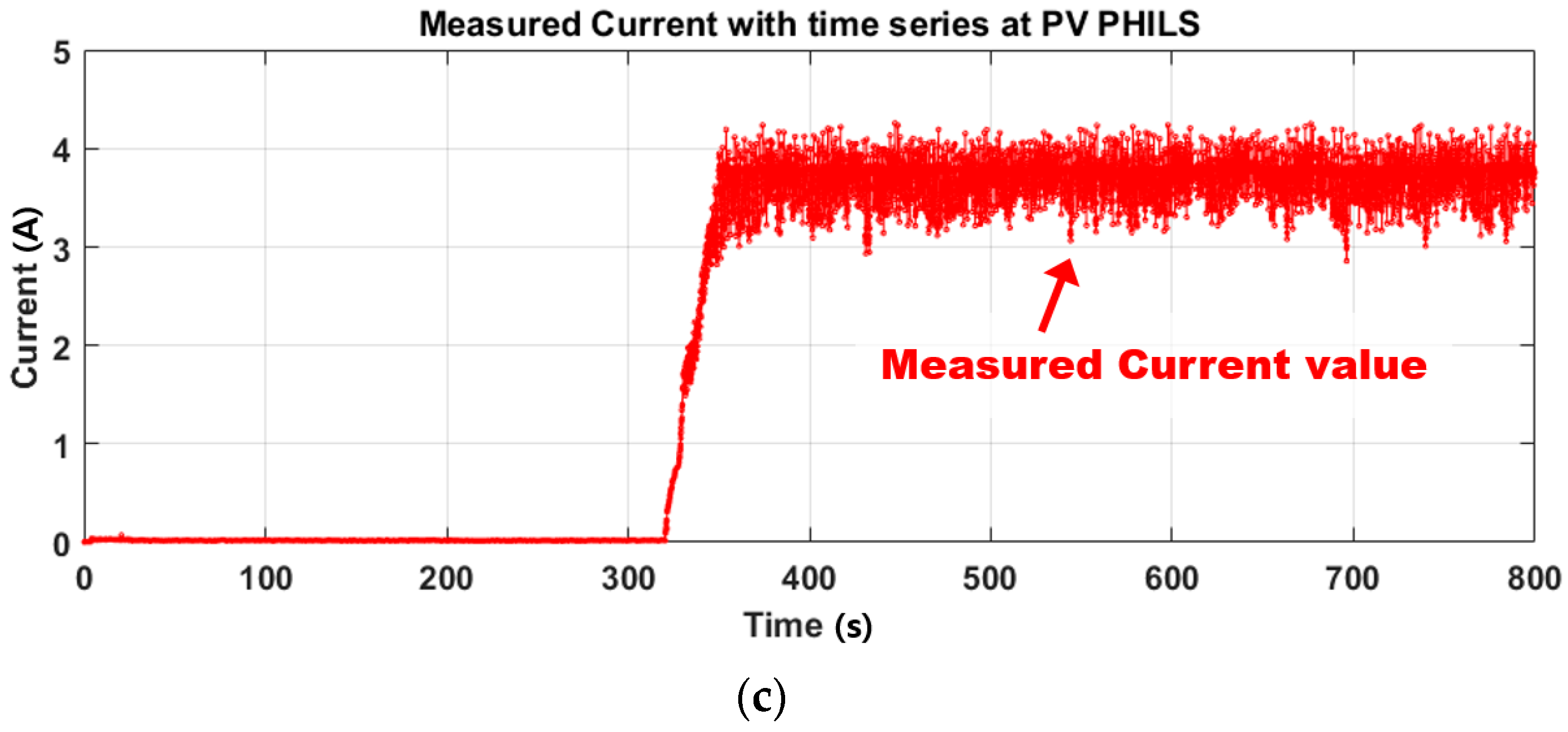
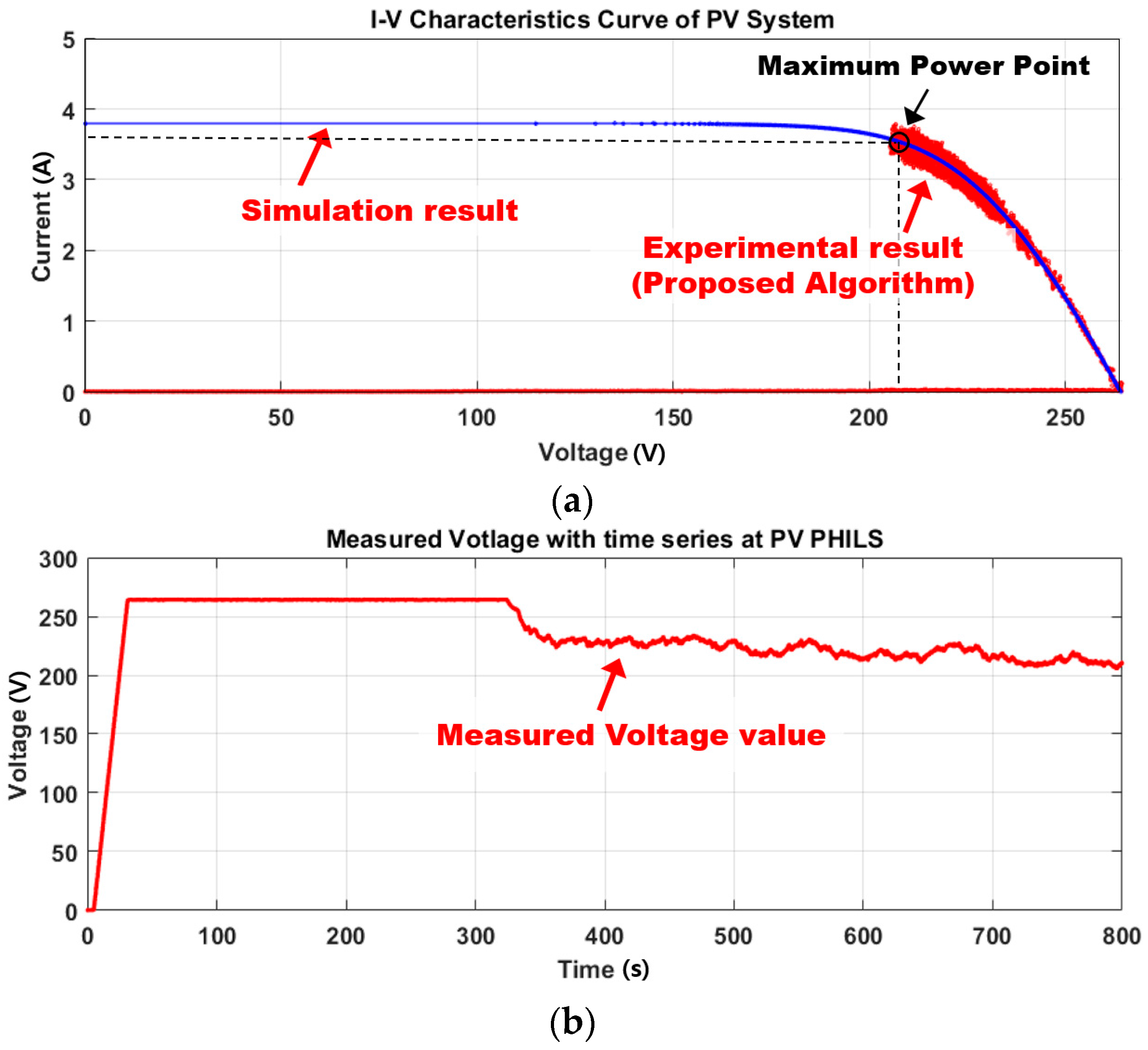
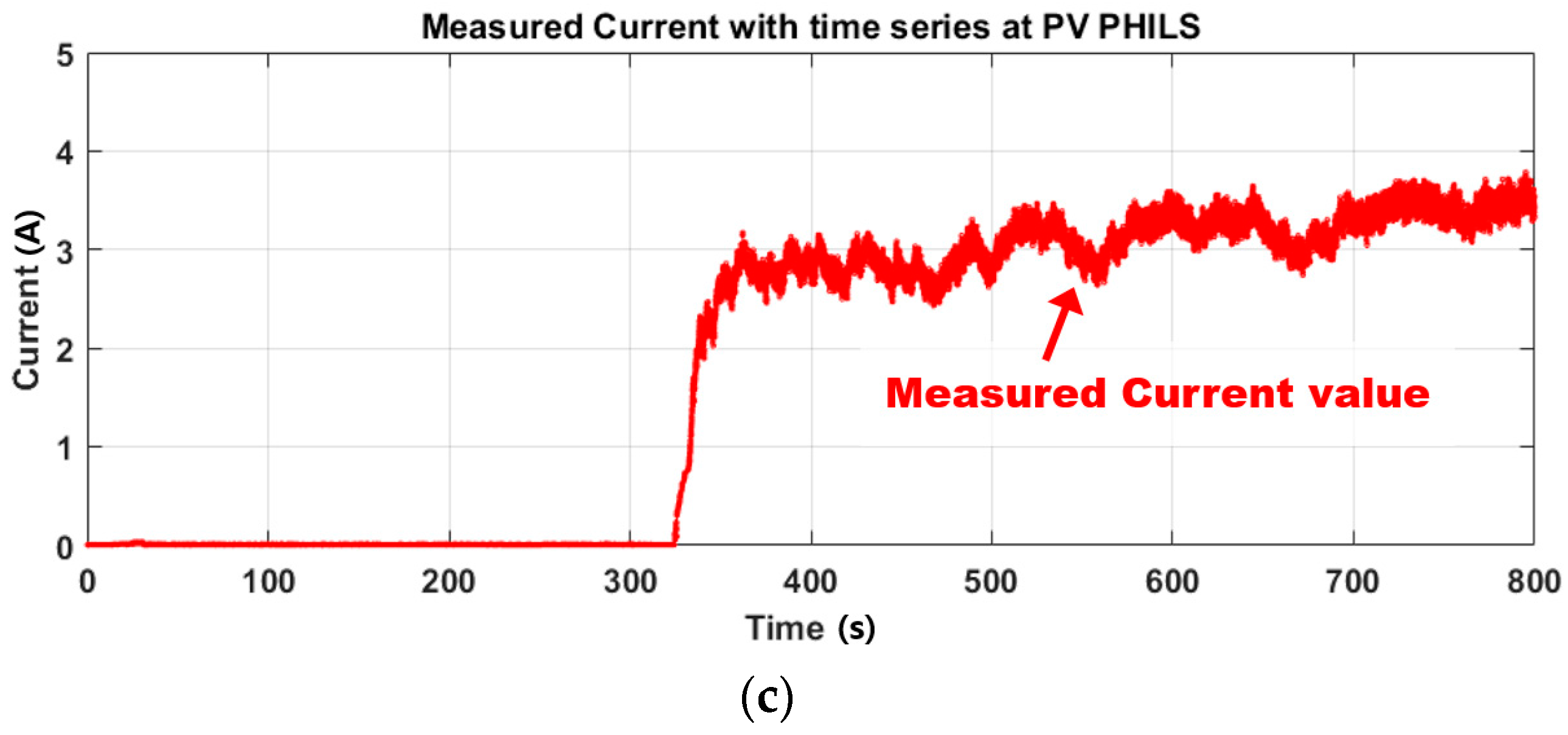
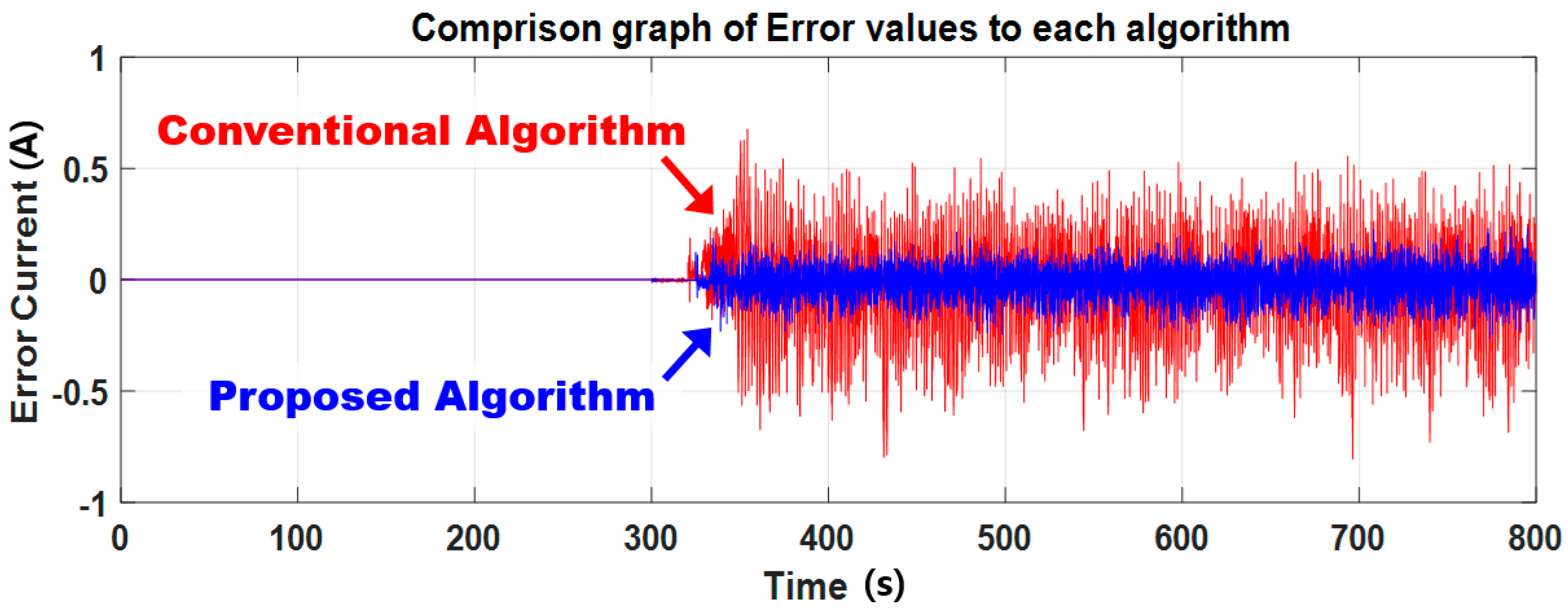
5.3. Experiment Analysis of Performance Characteristics
6. Conclusions
- (1)
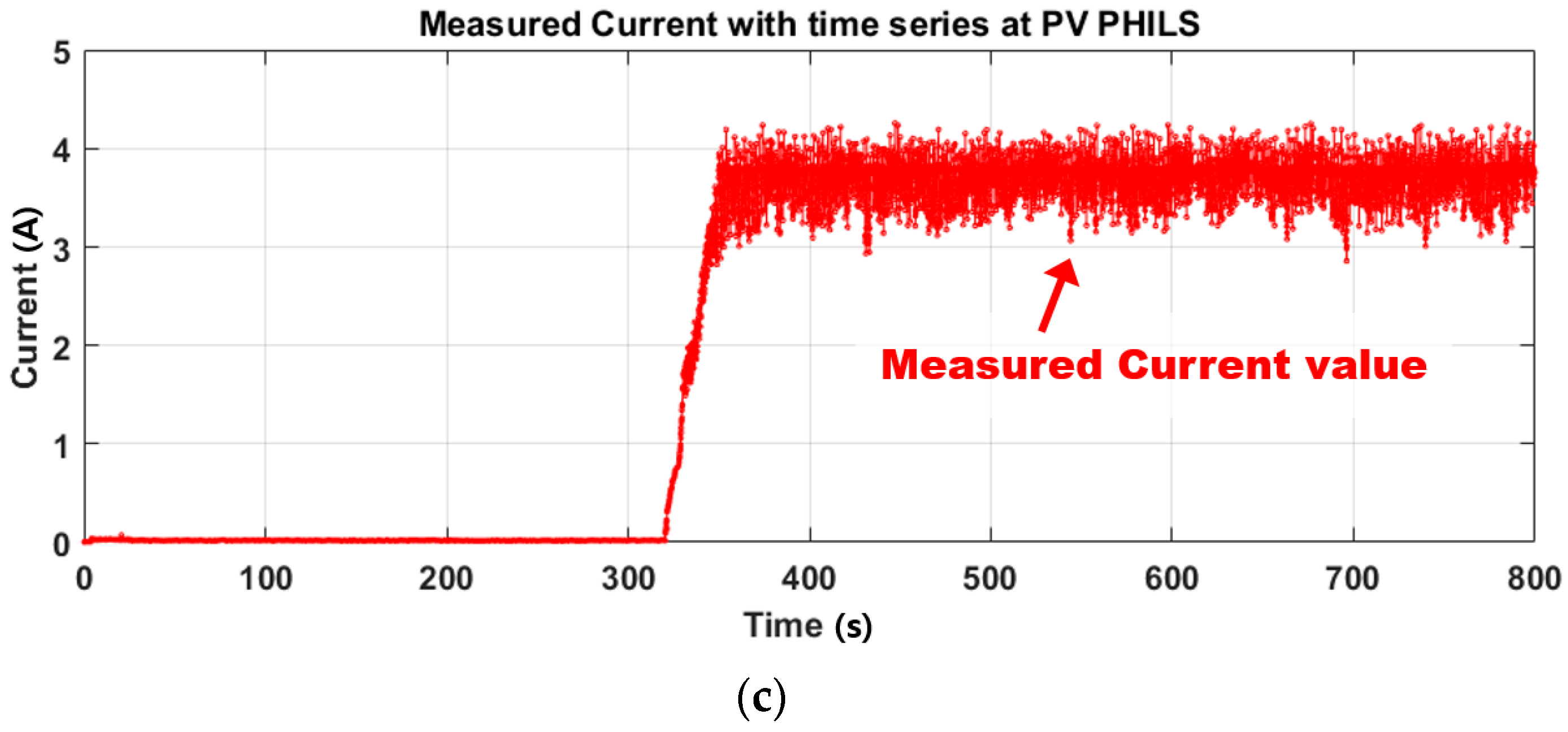
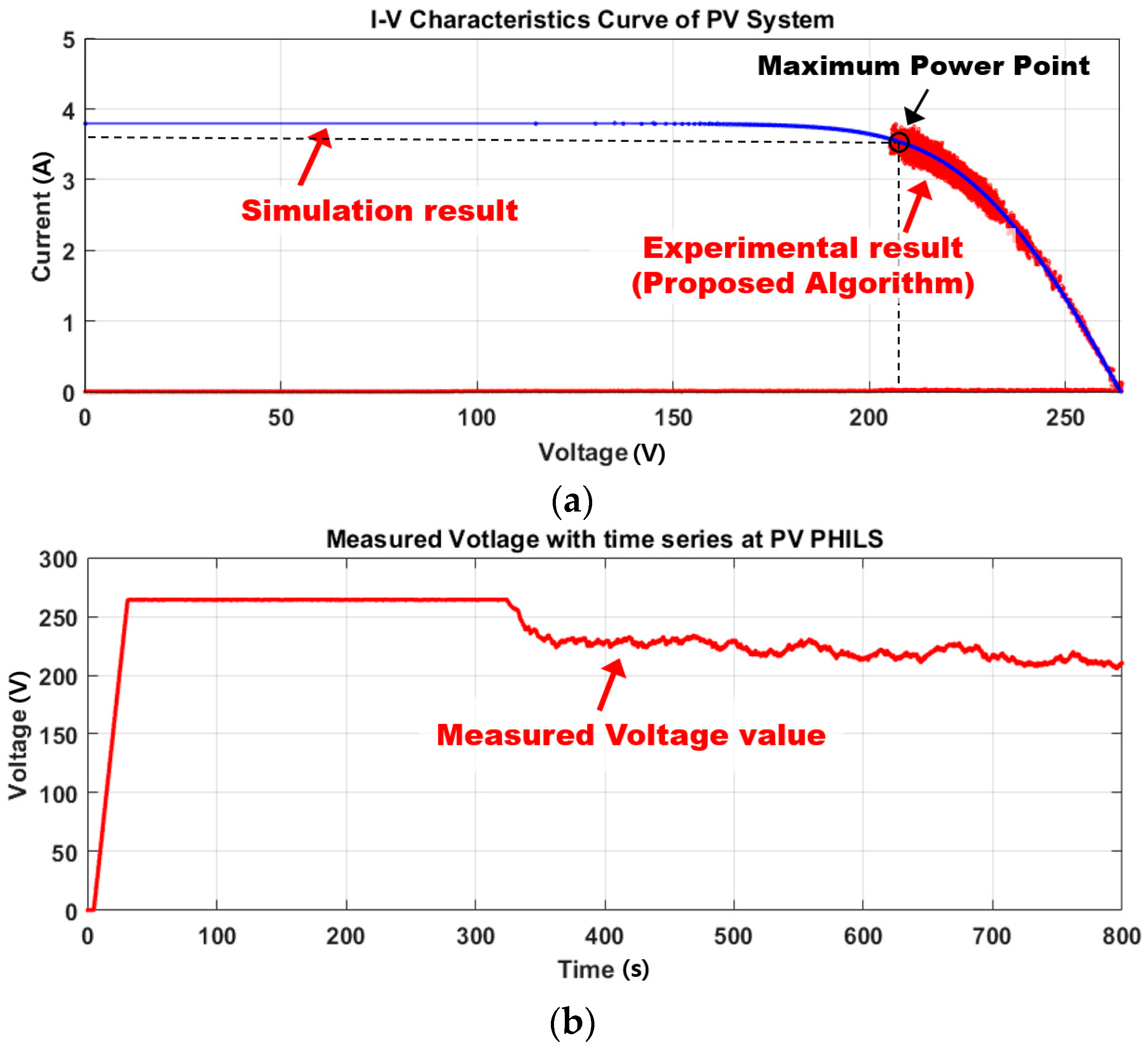
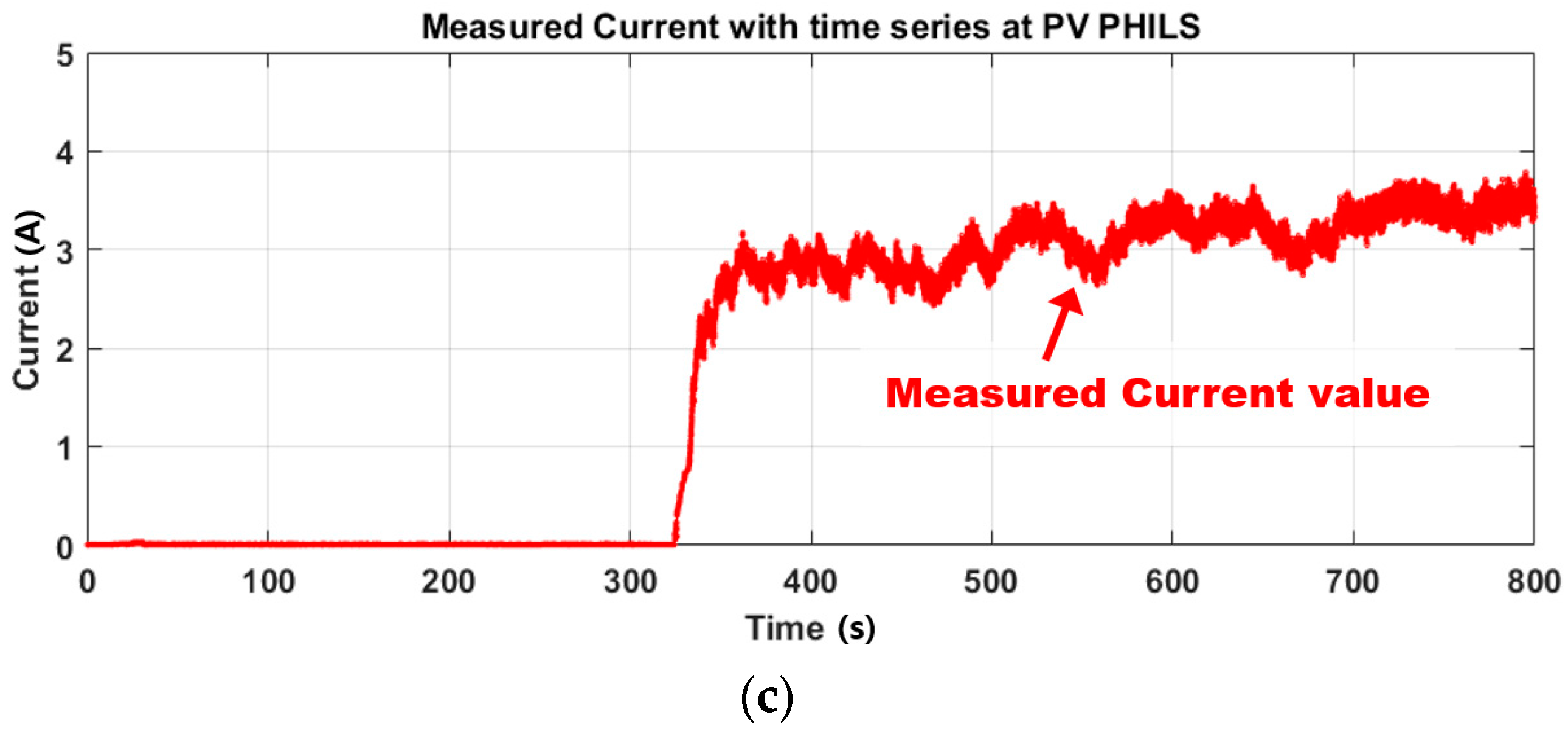
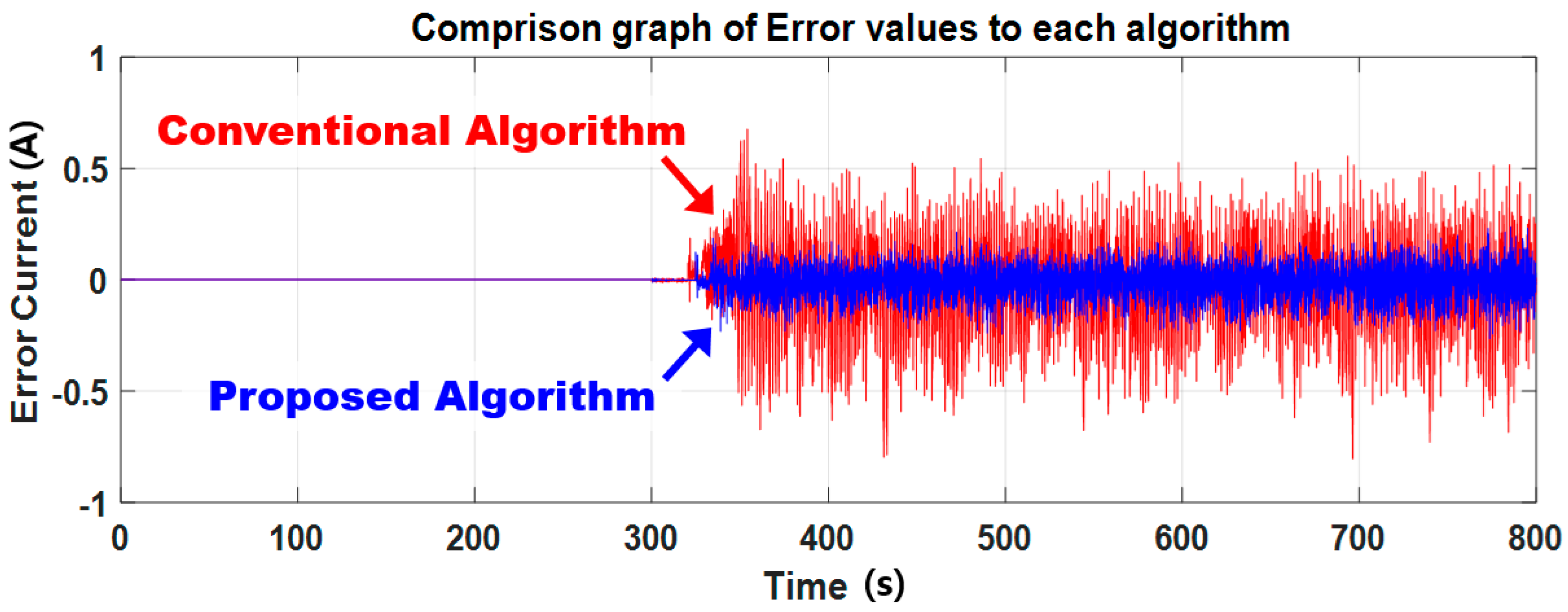
- The conventional PV algorithm, which is used in RTDS equipment, was applied to the PV PHIL simulator proposed in this study, but the output is in a transient state. However, the proposed algorithm confirmed a stable output state with a grid-tied PV inverter. In addition, the grid-tied PV inverter was able to perform MPPT control in the PV PHIL simulator with the proposed algorithm.
- (2)
- A real-time operating program, which is applied to the proposed algorithm, operating control logic, and API functions of peripheral devices, was developed and it verified the improved performance of the PV PHILS by means of a general Computing Unit, a DC power supply, and the peripherals.
- (3)
- With the spreading use of distributed PV power, such as household PVs and modular PV containers for isolated areas, the PV PHIL simulator can be used to increase the performance, efficiency, and safety of PV inverters and thus increase their competitiveness.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hung, D.Q.; Dong, Z.Y.; Trinh, H. Determining the size of PHEV charging stations powered by commercial grid-integrated PV systems considering reactive power support. Appl. Energy 2016, 183, 160–169. [Google Scholar] [CrossRef]
- Ul-Haq, A.; Cecati, C.; Al-Ammar, E.A. Modeling of a Photovoltaic-Powered Electric Vehicle Charging Station with Vehicle-to-Grid Implementation. Energies 2017, 10, 4. [Google Scholar] [CrossRef]
- Khana, O.; Xiaob, W. Review and qualitative analysis of submodule-level distributed power electronic solutions in PV power systems. Renew. Sustain. Energy Rev. 2017, 76, 516–528. [Google Scholar] [CrossRef]
- Zhang, Q.; Tezuka, T.; Ishihara, K.N.; Mclellan, B.C. Integration of PV power into future low-carbon smart electricity systems with EV and HP in Kansai Area, Japan. Renew. Energy 2012, 44, 99–108. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel solar powered electric vehicle charging station with the capability of vehicle-to-grid. Sol. Energy 2017, 142, 136–143. [Google Scholar] [CrossRef]
- Locment, F.; Sechilariu, M.; Forgez, C. Electric Vehicle Charging System with PV Grid-connected Configuration. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Lille, France, 1–3 September 2010. [Google Scholar]
- Birnie, D.P., III. Solar-to-Vehicle (S2V) Systems for Powering Commuters of the Future. J. Power Sources 2009, 186, 539–542. [Google Scholar] [CrossRef]
- Erickson, L.E.; Robinson, J.; Brase, G.; Cutsor, J. Solar Powered Charging Infrastructure for Electric Vehicles: A Sustainable Development; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Xiao, B.; Hang, L.; Mei, J. Modular Cascaded H-Bridge Multilevel PV Inverter with Distributed MPPT for Grid-Connected Applications. IEEE Trans. Ind. Appl. 2015, 51, 1722–1731. [Google Scholar] [CrossRef]
- Moon, S.; Yoon, S.G.; Park, J.H. A New Low-Cost Centralized MPPT Controller System for Multiply Distributed Photovoltaic Power Conditioning Modules. IEEE Trans. Smart Grid 2015, 6, 2649–2658. [Google Scholar] [CrossRef]
- Karbakhsh, F.; Amiri, M.; Zarchi, H.A. Two-switch flyback inverter employing a current sensorless MPPT and scalar control for low cost solar powered pumps. IET Renew. Power Gener. 2017, 11, 669–677. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X. Comparison study of MPPT control strategies for double-stage PV grid-connected inverter. In Proceedings of the IECON 2013 39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1561–1565. [Google Scholar]
- Rout, A.; Samantara, S.; Dash, G.K. Modeling and simulation of hybrid MPPT based standalone PV system with upgraded multilevel inverter. In Proceedings of the 2014 Annual IEEE India Conference (INDICON), Pune, India, 11–13 December 2014; pp. 1–6. [Google Scholar]
- Nzimako, O.; Wierckx, R. Modeling and Simulation of a Grid-Integrated Photovoltaic System Using a Real-Time Digital Simulator. IEEE Trans. Ind. Appl. 2016, 53, 1326–1336. [Google Scholar] [CrossRef]
- Rezkallah, M.; Hamadi, A.; Chandra, A.; Singh, B. Real-Time HIL Implementation of Sliding Mode Control for Standalone System Based on PV Array Without Using Dumpload. IEEE Trans. Sustain. Energy 2015, 6, 1389–1398. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.; Liu, L. Integrated Autonomous Voltage Regulation and Islanding Detection for High Penetration PV Applications. IEEE Trans. Power Electr. 2012, 28, 2826–2841. [Google Scholar] [CrossRef]
- Pinheiro, G.G.; de Carvalho Filho, J.M.; Bonatto, B.D. Modeling, simulation and comparison analysis of an installed photovoltaic system using RTDS. In Proceedings of the 2016 12th IEEE International Conference on Industry Applications (INDUSCON), Curitiba, Brazil, 20–23 November 2016; pp. 1–8. [Google Scholar]
- Khazaei, J.; Piyasinghe, L.; Miao, Z. Real-time digital simulation modeling of single-phase PV in RT-LAB. In Proceedings of the 2014 IEEE PES General Meeting | Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Mai, X.H.; Kwak, S.K.; Jung, J.H. Comprehensive Electric-Thermal Photovoltaic Modeling for Power-Hardware-in-the-Loop Simulation (PHILS) Applications. IEEE Trans. Ind. Electr. 2017, 64, 6255–6264. [Google Scholar] [CrossRef]
- Mather, B.A.; Kromer, M.A.; Casey, L. Advanced photovoltaic inverter functionality verification using 500kw power hardware-in-loop (PHIL) complete system laboratory testing. In Proceedings of the IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 24–27 February 2013. [Google Scholar]
- Faranda, R.; Leva, S.; Maugeri, V. MPPT techniques for PV systems: Energetic and cost comparison. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008. [Google Scholar]
- Desoto, W.; Klein, S.; Beckman, W. Improvement and validation of a model for photovoltaic array performance. Sol. Energy 2006, 80, 78–88. [Google Scholar] [CrossRef]
- Kim, D.J.; Kim, B.K.; Ryu, K.S.; Lee, G.S.; Jang, M.S.; Ko, H.S. Development of PV-power-hardware-in-loop simulator with realtime to improve the performance of the distributed PV inverter. J. Korean Sol. Energy Soc. 2017, 37, 47–59. [Google Scholar] [CrossRef]
- SOLAREX MSX-60 and MSX-64 Solar Panel Datasheet. Available online: https://www.solarelectricsu pply.com/media/custom/upload/Solarex-MSX64.pdf (accessed on 10 September 2017).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function Block | Initial Stage (IS) | System Test (ST) | Normal Operation (NP) | Normal Stop (NS) |
|---|---|---|---|---|
| DC power supply (DC) | ||||
| Main computing unit (MC) | ||||
| Measurement unit (MU) | ||||
| Communication unit (CU) |
| Category | Value | Unit |
|---|---|---|
| Model | MSX-60 | - |
| Cell type | Polycrystalline silicon | - |
| Maximum power (Pmax) | 60 | W |
| Voltage at Pmax (Vmp) | 17.1 | V |
| Current at Pmax (Imp) | 3.5 | A |
| Open-circuit voltage (Voc) | 21.1 | V |
| Short-circuit current (Isc) | 3.8 | A |
| Diode quality factor | 1.2 | - |
| PV diode band-gap energy | 1.124 | eV |
| Number of series cells | 36 | - |
| Number of parallel cells | 1 | - |
| Number of parallel modules | 12 | - |
| Number of parallel modules | 1 | - |
| Category | Value | Unit |
|---|---|---|
| Output rating voltage | 0–315 | V |
| Output rating current | 0–8.4 | A |
| Output power | 2600 | W |
| Programming accuracy | 0.1% + 450.0 mV | - |
| Ripple and noise (20 Hz–20 MHz) | ≤25 mVrms | - |
| AC input rating | Single phase 220 V ± 10% 50–60 Hz | - |
| Category | Value | Unit |
|---|---|---|
| Manufacturer | DASSTECH | - |
| Model | DSP-123K2 | - |
| Max. DC power | 3300 | W |
| PV voltage range MPPT | 110–450 | V |
| Max. input current | 15 | A |
| Nominal AC output | 3000 | W |
| AC voltage output | 220–240 | V |
| AC connection | Single phase | - |
| Max. efficiency | 96.7 | % |
| Category | Value | Unit |
|---|---|---|
| Performance Index of Conventional Algorithm | 75.4 | - |
| Performance Index of Proposed Algorithm | 29.9 | - |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.-J.; Kim, B.; Ko, H.-S.; Jang, M.-S.; Ryu, K.-S. A Novel Supervisory Control Algorithm to Improve the Performance of a Real-Time PV Power-Hardware-In-Loop Simulator with Non-RTDS. Energies 2017, 10, 1651. https://doi.org/10.3390/en10101651
Kim D-J, Kim B, Ko H-S, Jang M-S, Ryu K-S. A Novel Supervisory Control Algorithm to Improve the Performance of a Real-Time PV Power-Hardware-In-Loop Simulator with Non-RTDS. Energies. 2017; 10(10):1651. https://doi.org/10.3390/en10101651
Chicago/Turabian StyleKim, Dae-Jin, Byungki Kim, Hee-Sang Ko, Moon-Seok Jang, and Kyung-Sang Ryu. 2017. "A Novel Supervisory Control Algorithm to Improve the Performance of a Real-Time PV Power-Hardware-In-Loop Simulator with Non-RTDS" Energies 10, no. 10: 1651. https://doi.org/10.3390/en10101651
APA StyleKim, D.-J., Kim, B., Ko, H.-S., Jang, M.-S., & Ryu, K.-S. (2017). A Novel Supervisory Control Algorithm to Improve the Performance of a Real-Time PV Power-Hardware-In-Loop Simulator with Non-RTDS. Energies, 10(10), 1651. https://doi.org/10.3390/en10101651