
A Model Predictive Control-Based Power Converter System for Oscillating Water Column Wave Energy Converters



Abstract
1. Introduction
2. Electrical Grid and Grid Codes in Australia-King Island
- The power plant should be able to control its active power output according to the limits set by TSO to maintain system security and reliability.
- The power factor is required to be maintained as PFind equal to1.0 and PFcap equal to 0.95 at both 100% and 50% power.
- The frequency should be maintained between 47 Hz and 52 Hz.
- The operating voltage should be kept at ±10% of the rated voltage at the point of connection (POC).
- The voltage quality standards such as rapid voltage changes, harmonic voltages, voltage variations and flicker should comply with the standards of IEC 61000-3-2 and IEEE1547.
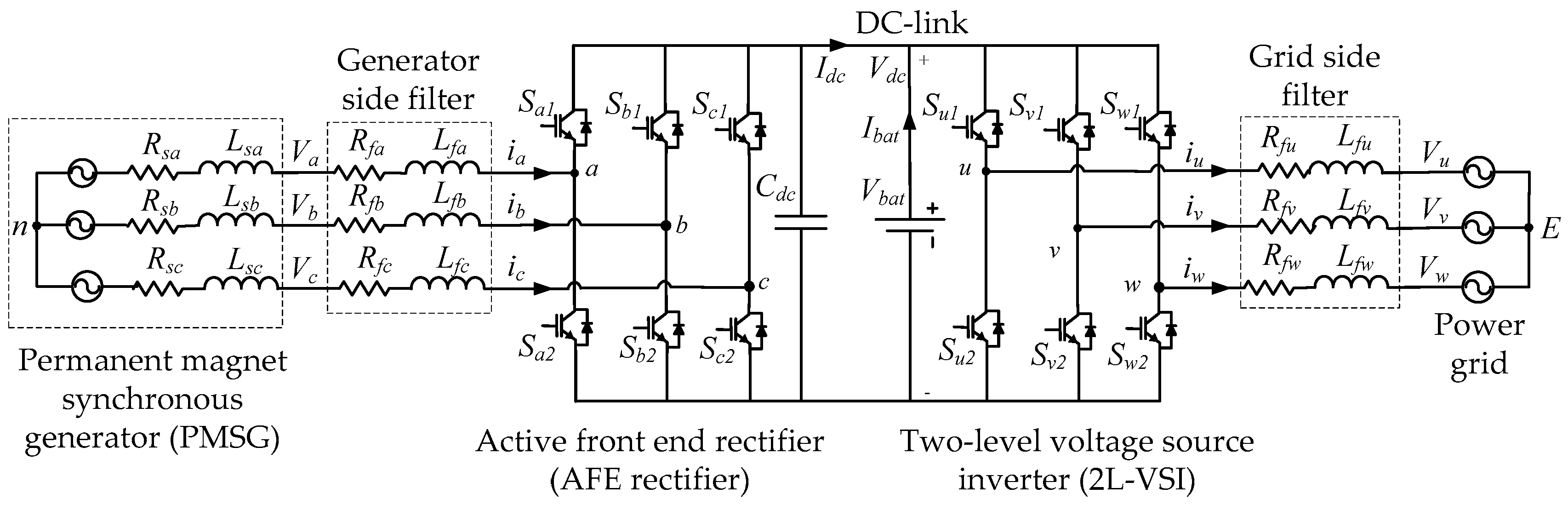
3. Overall System Modelling
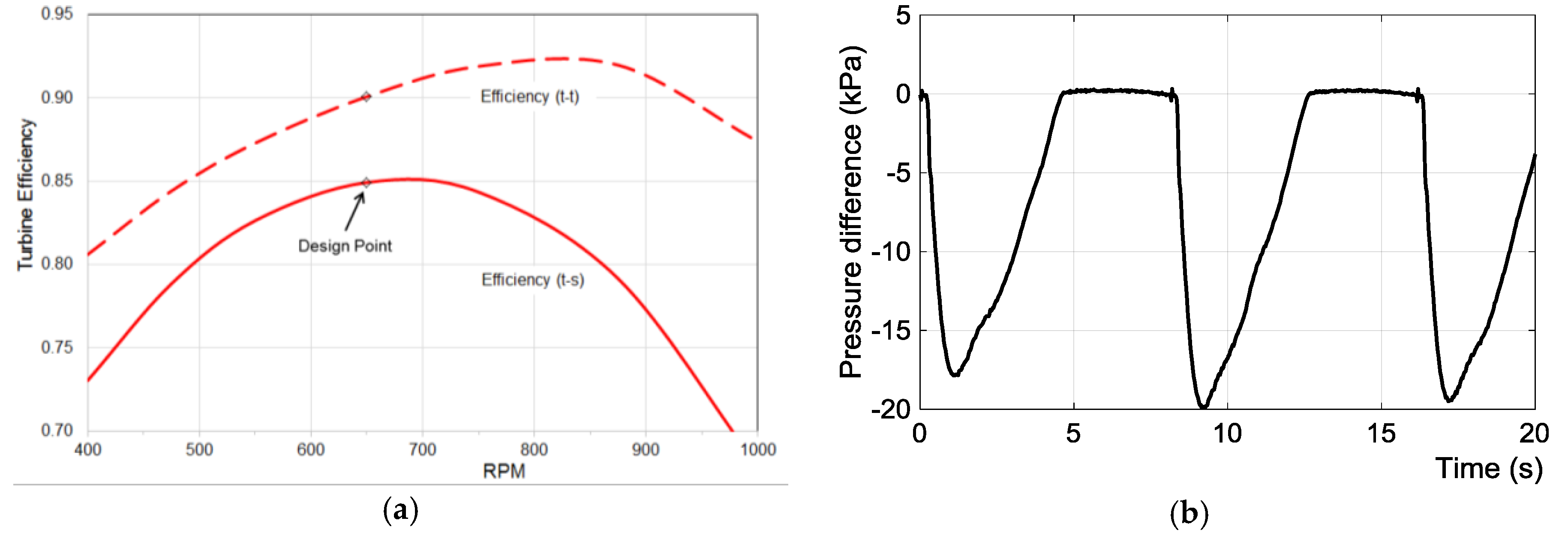
3.1. OWC Air Turbine Model
3.2. PMSG and Grid Model
3.3. Li-Ion Battery Storage Model
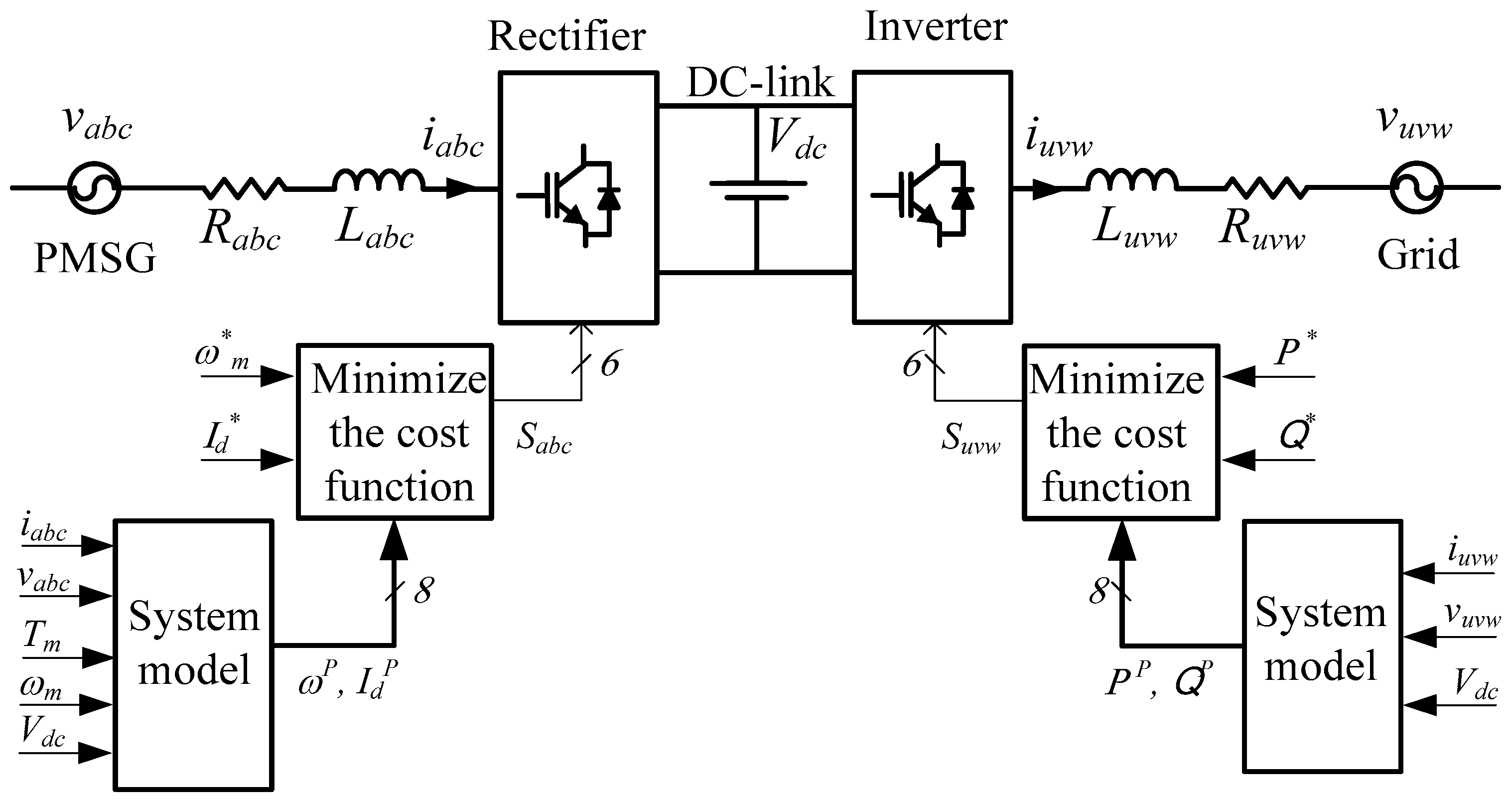
4. MPC for the Power Conversion System
4.1. Active Front End Rectifier (AFE Rectifier) Model
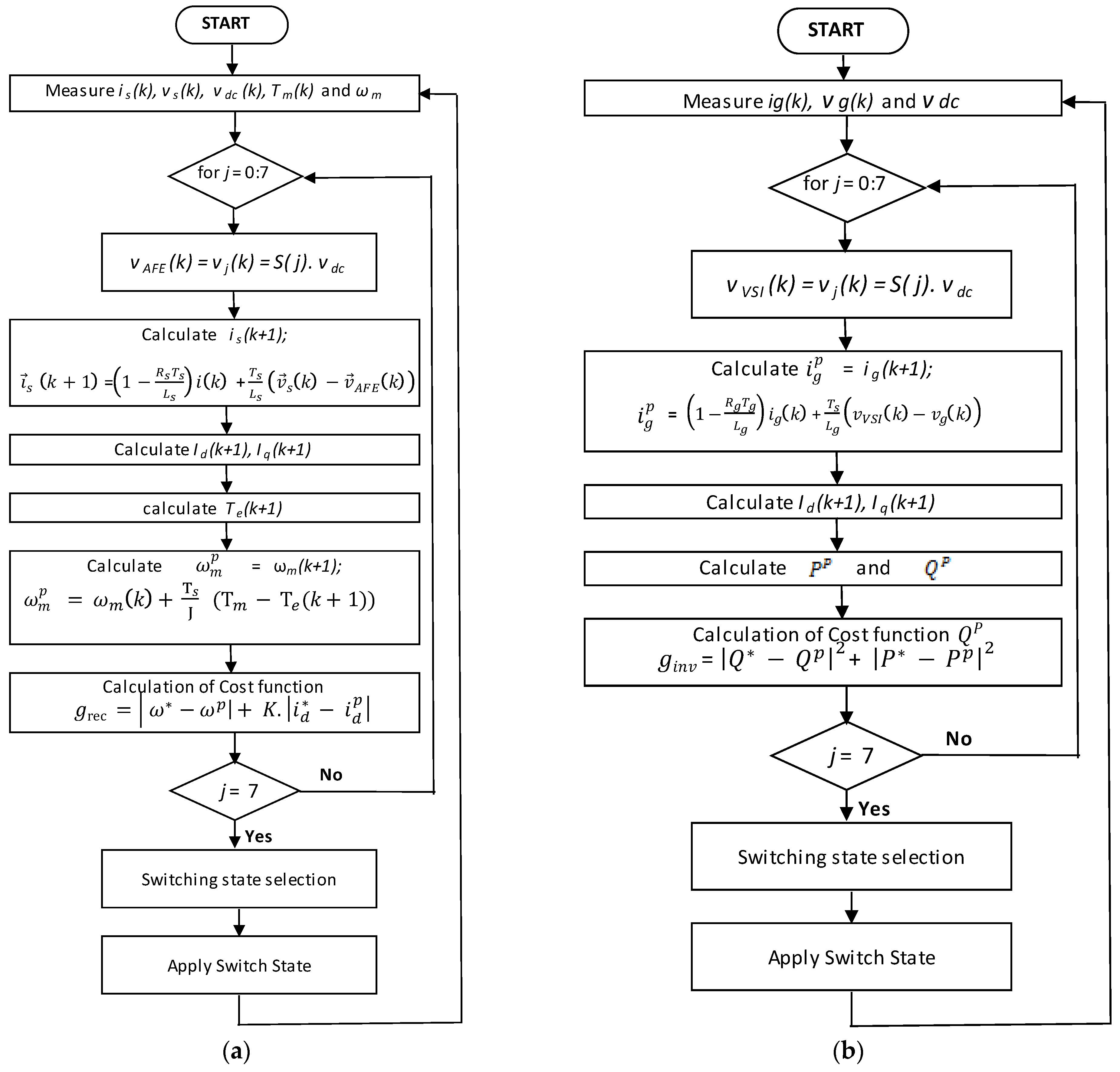
4.2. FCS-MPC for AFE Rectifier
4.3. Two-Level Voltage Source Inverter (2L-VSI) Model
4.4. FCS-MPC for 2L-VSI
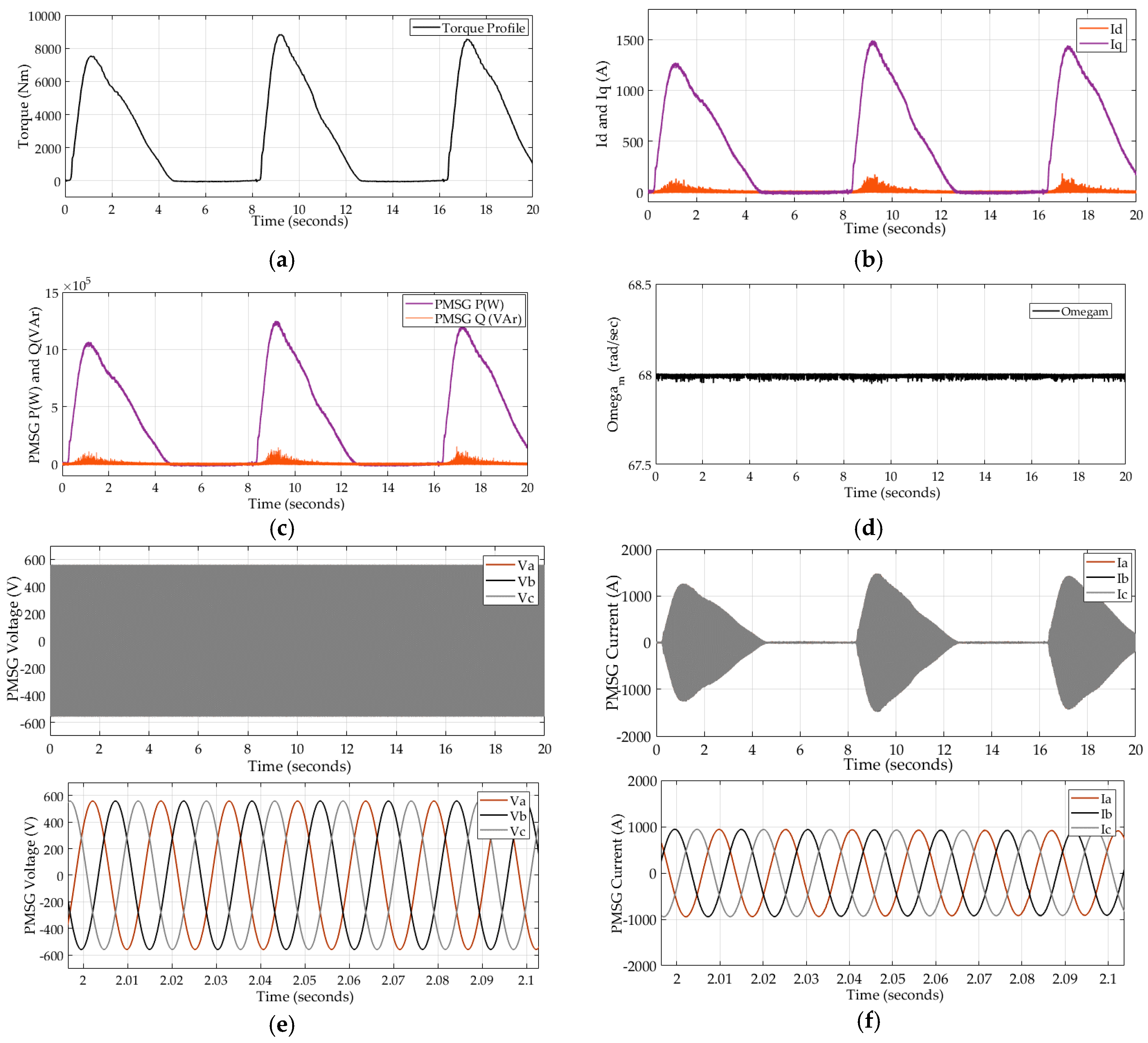
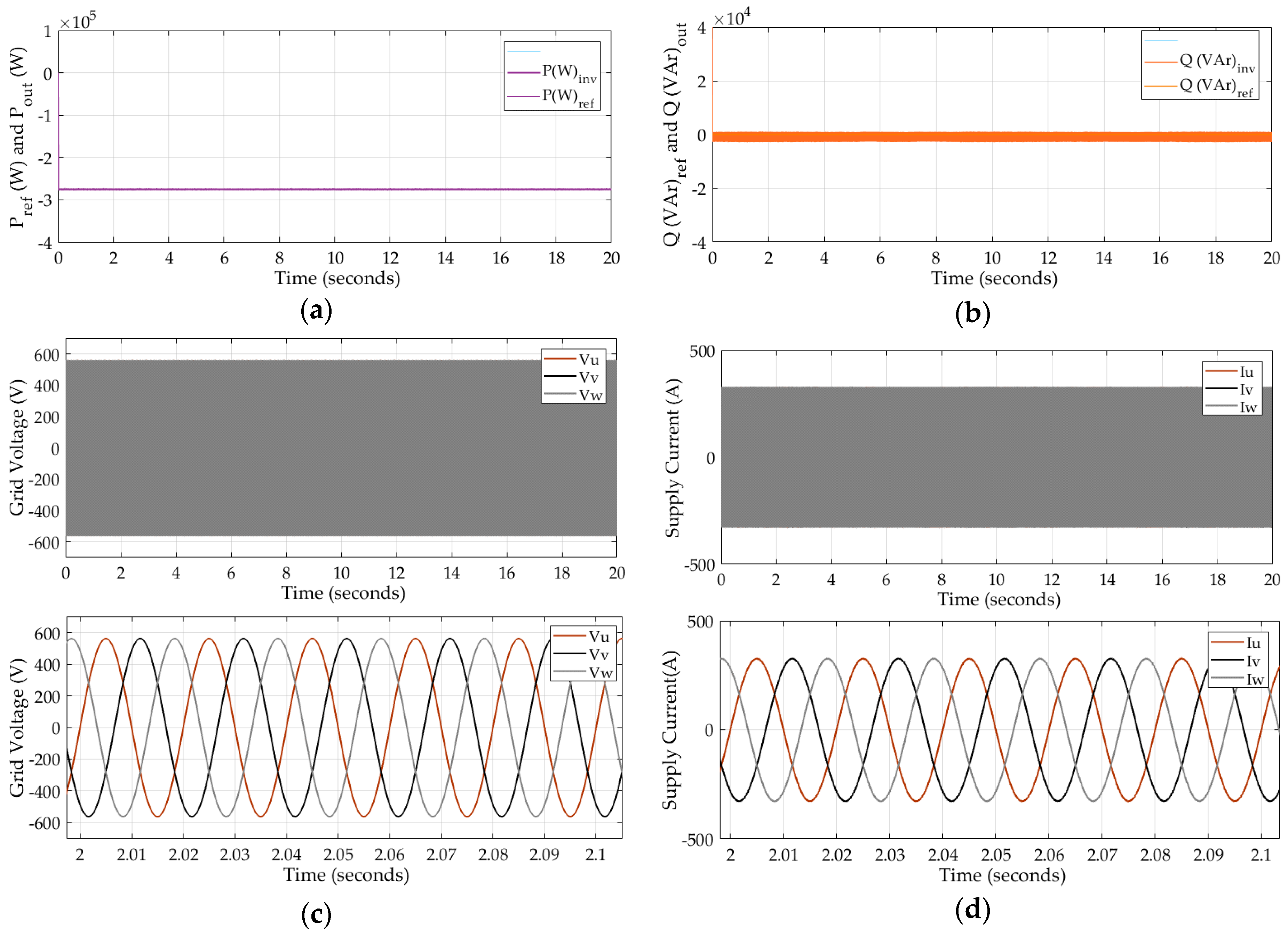
5. Simulation Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Carson, L.; Bradshaw, M.; Jaques, L.; Che, N.; Ball, A. Australian Energy Resource Assessment 2010; Commonwealth of Australia (Geoscience Australia): Canberra, Australia, 2010. [Google Scholar]
- Carson, L.; Bradshaw, M.; Jaques, L. Australian Energy Resource Assessment 2014, 2nd ed.; Commonwealth of Australia (Geoscience Australia): Canberra, Australia, 2014. [Google Scholar]
- Rajapakse, G.; Jayasinghe, S.G.; Fleming, A.; Shahnia, F. Model Predictive Control-based Power take-off Control of an Oscillating Water Column Wave Energy Conversion System. In Proceedings of the 2017 International Conference on Substantial Energy Engineering (ICSEE 2017), Perth, Australia, 12–14 June 2017. [Google Scholar]
- Stegman, A.; de Andres, A.; Jeffrey, H.; Johanning, L.; Bradley, S. Exploring Marine Energy Potential in the UK Using a Whole Systems Modelling Approach. Energies 2017, 10, 1251. [Google Scholar] [CrossRef]
- Delmonte, N.; Barater, D.; Giuliani, F.; Cova, P.; Buticchi, G. Review of Oscillating Water Column Converters. IEEE Trans. Ind. Appl. 2016, 52, 1698–1710. [Google Scholar] [CrossRef]
- Hannon, M.; Griffiths, J.; Vantoch-Wood, A.; Carcas, M.; Bradley, S.; Boud, R.; Wyatt, S. World Energy Resources; Marine Energy 2016; World Energy Council; World Energy Resources: London, UK, 2016. [Google Scholar]
- Wave Swell Energy. Sustainable Elecricity from the Ocean. Available online: http://waveswellenergy.com.au/ (accessed on 27 March 2017).
- Fleming, A.; MacFarlane, G.; Hunter, S.; Denniss, T. Power Performance Prediction for a Vented Oscillating Water Column Wave Energy Converter with a Unidirectional Air Turbine Power Take-off. In Proceedings of the 12th European Wave and Tidal Energy Conference (EWTEC), Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Falcao, A.F.O.; Henriques, J.C.C. Oscillating-water-column wave energy converters and air turbines: A review. Renew. Energy 2015, 85, 1391–1424. [Google Scholar] [CrossRef]
- Oceanlinx. Available online: http://www.oceanlinx.com/ (accessed on 27 March 2017).
- Tedeschi, E.; Carraro, M.; Molinas, M.; Mattavelli, P. Effect of Control Strategies and Power Take-Off Efficiency on the Power Capture From Sea Waves. IEEE Trans. Energy Convers. 2011, 26, 1088–1098. [Google Scholar] [CrossRef]
- Heier, S. Grid Integration of Wind Energy; John Wiley & Sons Ltd: Chichester, UK, 2014. [Google Scholar]
- Wu, Q.; Xu, Z.; Østergaard, J. Grid Integration Issues for Large Scale Wind Power Plants (WPPs). In Proceedings of the Power and Energy Society General Meeting (IEEE PES GM 2010), Providence, RI, USA, 25–29 July 2012; pp. 1–6. [Google Scholar]
- Zou, Y.; Cheng, K.W.E. A Vertical Flux-Switching Permanent Magnet Based Oscillating Wave Power Generator with Energy Storage. Energies 2017, 10, 887. [Google Scholar] [CrossRef]
- Ceballos, S.; Rea, J.; Robles, E.; Lopez, I.; Pou, J.; O’Sullivan, D.L. Control strategies for combining local energy storage with wells turbine oscillating water column devices. Renew. Energy 2015, 83, 1097–1107. [Google Scholar] [CrossRef]
- Vilathgamuwa, M.; Nayanasiri, D.; Gamini, S. Power Electronics for Photovoltaic Power Systems; Hudgins, J., Ed.; Morgan & Claypool Publishers: San Rafael, CA, USA, 2015. [Google Scholar]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuña, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Mehrasa, M.; Adabi, M.E.; Pouresmaeil, E.; Adabi, J. Passivity-based control technique for integration of DG resources into the power grid. Int. J. Electr. Power Energy Syst. 2014, 58, 281–290. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Akorede, M.F.; Jørgensen, B.N.; Catalao, P.S. Multilevel converter control approach of active power filter for harmonics elimination in electric grids. Energy 2015, 84, 722–731. [Google Scholar] [CrossRef]
- Mehrasa, M.; Rezanejhad, M.; ouresmaeil, E.; Catalão, P.S.; Zabihi, S. Analysis and control of single-phase converters for integration of small-scaled renewable energy sources into the power grid. In Proceedings of the 7th Power Electronics, Drive Systems & Technologies Conference (PEDSTC 2016), Tehran, Iran, 16–18 February 2016. [Google Scholar]
- Rodriguez, J.; Cortés, P. Predictive Control Of Power Converters and Electrical Drives; John Wiley & Sons Ltd: Chichester, UK, 2012. [Google Scholar]
- Sultana, W.R.; Sahoo, S.K.; Sukchai, S.; Yamuna, S.; Venkatesh, D. A review on state of art development of model predictive control for renewable energy applications. Renew. Sustain. Energy Rev. 2017, 76, 391–406. [Google Scholar] [CrossRef]
- Tarisciotti, L.; Zanchetta, P.; Watson, A.; Clare, J.C.; Degano, M.; Bifaretti, S. Modulated Model Predictive Control for a Three-Phase Active Rectifier. IEEE Trans. Ind. Appl. 2015, 51, 1610–1620. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Kim, K.H. Finite Control Set–Model Predictive Control with Modulation to Mitigate Harmonic Component in Output Current for a Grid-Connected Inverter under Distorted Grid Conditions. Energies 2017, 10, 907. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Model Predictive Control of Permanent Magnet Synchronous Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the Power and Energy Student Summit 2016 (PESS 2016), Aachen, Germany, 19–20 January 2016. [Google Scholar]
- Lekube, J.; Garrido, A.J.; Garrido, I. Rotational Speed Optimization in Oscillating Water Column Wave Power Plants Based on Maximum Power Point Tracking. IEEE Trans. Autom. Sci. Eng. 2017, 14, 681–691. [Google Scholar] [CrossRef]
- Clean Energy Council. Renewable Energy—Marine Energy. Available online: https://www.cleanenergycouncil.org.au/technologies/marine-energy.html (accessed on 17 February 2017).
- Tasnetworks. TasNetworks Annual Planning Report 2016; Tasmanian Networks Pty Ltd (TasNetworks): Lenah Valley, Australia, 2016. [Google Scholar]
- The King Island Renewable Energy Integration Project (KIREIP). Available online: http://www.kingislandrenewableenergy.com.au/project-information/overview (accessed on 24 May 2017).
- Bimbhra, P.S. Generalized Theory of Electrical Machines; Khanna Publishers: Delhi, India, 1992. [Google Scholar]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Parvez, M.; Tan, N.M.L.; Akagi, H. An Improved Active-Front-End Rectifier Using Model Predictive Control. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 122–127. [Google Scholar]
- Krishnan, R. Permanent Magnet Synchronous and Brushless DC Motor Drives; Taylor & Francis Group: London, UK, 2010. [Google Scholar]
- Modeling of a Variable Speed Wind Turbine with a Permanent Magnet Synchronous Generator. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISlE 2009), Seoul, Korea, 5–8 July 2009.
- Hughes, M.G.; Heap, A.D. National-scale wave energy resource assessment for Australia. Renew. Energy 2009, 35, 1783–1791. [Google Scholar] [CrossRef]
- Kempener, R.; Borden, E. Battery Storage for Renewables: Market Status and Technology Outlook; The International Renewable Energy Agency (IRENA): Masdar City, UAE, 2015. [Google Scholar]
- Leuchter, J. Bi-Directional DC—DC Converters for Battery Buffers with Supercapacitor. In Energy Storage in the Emerging Era of Smart Grids; InTech: Rijeka, Croatia, 2011. [Google Scholar]
- Kim, J.; Suharto, Y.; Daim, T.U. Evaluation of Electrical Energy Storage (EES) technologies for renewable energy: A case from the US Pacific Northwest. J. Energy Storage 2017, 11, 25–54. [Google Scholar] [CrossRef]
- PBES Power and Energy Industrial Lithium Batteries. In PBES Specification Sheet System Specifications for the PBES Power & Energy Systems; Storage, P.B.E., Ed.; Plan B Energy Storage: Vancouver, BC, Canada; Trondheim, Norway; Barcelona, Spain; Copenhagen, Denmark, 2017. [Google Scholar]
- Power Module; Scalable and Modular Lithium-Ion Energy Storage System. Available online: https://www.powertechsystems.eu/wp-content/uploads/2016/05/Fiche-Produit-PowerModule_EN.pdf (accessed on 1 August 2017).
- Thirugnanam, K.; Joy, E.R.T.P.; Singh, M.; Kumar, P. Mathematical Modeling of Li-Ion Battery Using Genetic Algorithm Approach for V2G Applications. IEEE Trans. Energy Convers. 2014, 29, 332–343. [Google Scholar]
- Rahmoun, A.; Biechl, H. Modelling of Li-ion batteries using equivalent circuit diagrams. Prz. Elektrotech. (Electr. Rev.) 2012, 152–156. [Google Scholar]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model Predictive Control: A Review of Its Applications in Power Electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Texas Instruments. TMS320F2837xS Delfino™ Microcontrollers; Texas Instruments: Dallas, TX, USA, 2015. [Google Scholar]
- Liu, Z.; Wang, D.; Peng, Z. A Simplified Direct Finite-Control-Set Model Predictive Control for AFEs with DC-Link Voltage Dynamic Reference Design. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 4294–4299. [Google Scholar]
- Quevedo, D.E.; Aguilera, R.P.; Pérez, M.A.; Cortés, P.; Lizana, R. Model Predictive Control of an AFE Rectifier With Dynamic References. IEEE Trans. Power Electron. 2012, 7, 3128–3136. [Google Scholar] [CrossRef]
- Parvez, M.; Mekhilef, F.; Tan, M.L.N.; Akagi, H. A Robust Modified Model Predictive Control (MMPC) Based on Lyapunov Function for ThreePhase Active-Front-End (AFE) Rectifier. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 1163–1168. [Google Scholar]
- Permanent Magnet Generator Quotation Sheet. Qingdao Greef New Energy Equipment; Greef Energy: Qingdao, China, 2017. [Google Scholar]
- Langella, R.; Testa, A. IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power System; University of Campania “Luigi Vanvitelli”: Caserta, Italy, 2014. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switching States | Voltage Space Vector | ||
|---|---|---|---|
| Sa | Sb | Sc | |
| 0 | 0 | 0 | |
| 1 | 0 | 0 | |
| 1 | 1 | 0 | |
| 0 | 1 | 0 | |
| 0 | 1 | 1 | |
| 0 | 0 | 1 | |
| 1 | 0 | 1 | |
| 1 | 1 | 1 | |
| PMSG | Generator Side Filter | ||
|---|---|---|---|
| Rated Power | 2 MW | Inductance | 0.5 mH |
| Rated rotate speed | 650 rpm | Resistance | 0.01 Ω |
| Rated Voltage | 690 VAC | dc-link | |
| Rated current | 1673.5 A | Capacitance (Cdc) | 470 mF |
| Number of pole pairs | 6 | dc-link voltage | ~1000 V |
| Resistance (Rs) | 0.0024 Ω | Grid side Filter | |
| Inductances (Ld = Lq) | 0.355 mH | Inductance | 1 mH |
| Magnetic flux () | 0.666 Wb | Resistance | 0.1 Ω |
| Li-ion battery storage | Grid | ||
| Nominal voltage/Fully charged voltage | 1000 V/1050 V | - | - |
| Rated capacity @ nominal voltage | 150 Ah (75 Ah × 2) | Voltage | 690 Vrms |
| Rated current @ nominal voltage | 900 A (450 A × 2) | Frequency | 50 Hz |
| Initial state of charge in % | 65% | Other | |
| Reference Values | Sample time | 10−5 s | |
| Active Power | 270 kW | Simulator run-time | 20 s |
| Reactive Power | 0 | Total Inertia (J) | 0.25 kgm2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rajapakse, G.; Jayasinghe, S.; Fleming, A.; Negnevitsky, M. A Model Predictive Control-Based Power Converter System for Oscillating Water Column Wave Energy Converters. Energies 2017, 10, 1631. https://doi.org/10.3390/en10101631
Rajapakse G, Jayasinghe S, Fleming A, Negnevitsky M. A Model Predictive Control-Based Power Converter System for Oscillating Water Column Wave Energy Converters. Energies. 2017; 10(10):1631. https://doi.org/10.3390/en10101631
Chicago/Turabian StyleRajapakse, Gimara, Shantha Jayasinghe, Alan Fleming, and Michael Negnevitsky. 2017. "A Model Predictive Control-Based Power Converter System for Oscillating Water Column Wave Energy Converters" Energies 10, no. 10: 1631. https://doi.org/10.3390/en10101631
APA StyleRajapakse, G., Jayasinghe, S., Fleming, A., & Negnevitsky, M. (2017). A Model Predictive Control-Based Power Converter System for Oscillating Water Column Wave Energy Converters. Energies, 10(10), 1631. https://doi.org/10.3390/en10101631