
Level of Service Model of the Non-Motorized Vehicle Crossing the Signalized Intersection Based on Riders’ Perception Data




Abstract
:1. Introduction
2. Literature Review
- is the average delay of the bicycle (s),
- is cycle length (s),
- is effective green time for the bicycle lane (s)
- is the bicycle flow rate (bicycle/h), and
- is the capacity of the bicycle lane (bicycle/h).
3. Methodology for the Delay Model of the Non-Motorized Vehicle at Signalized Intersections
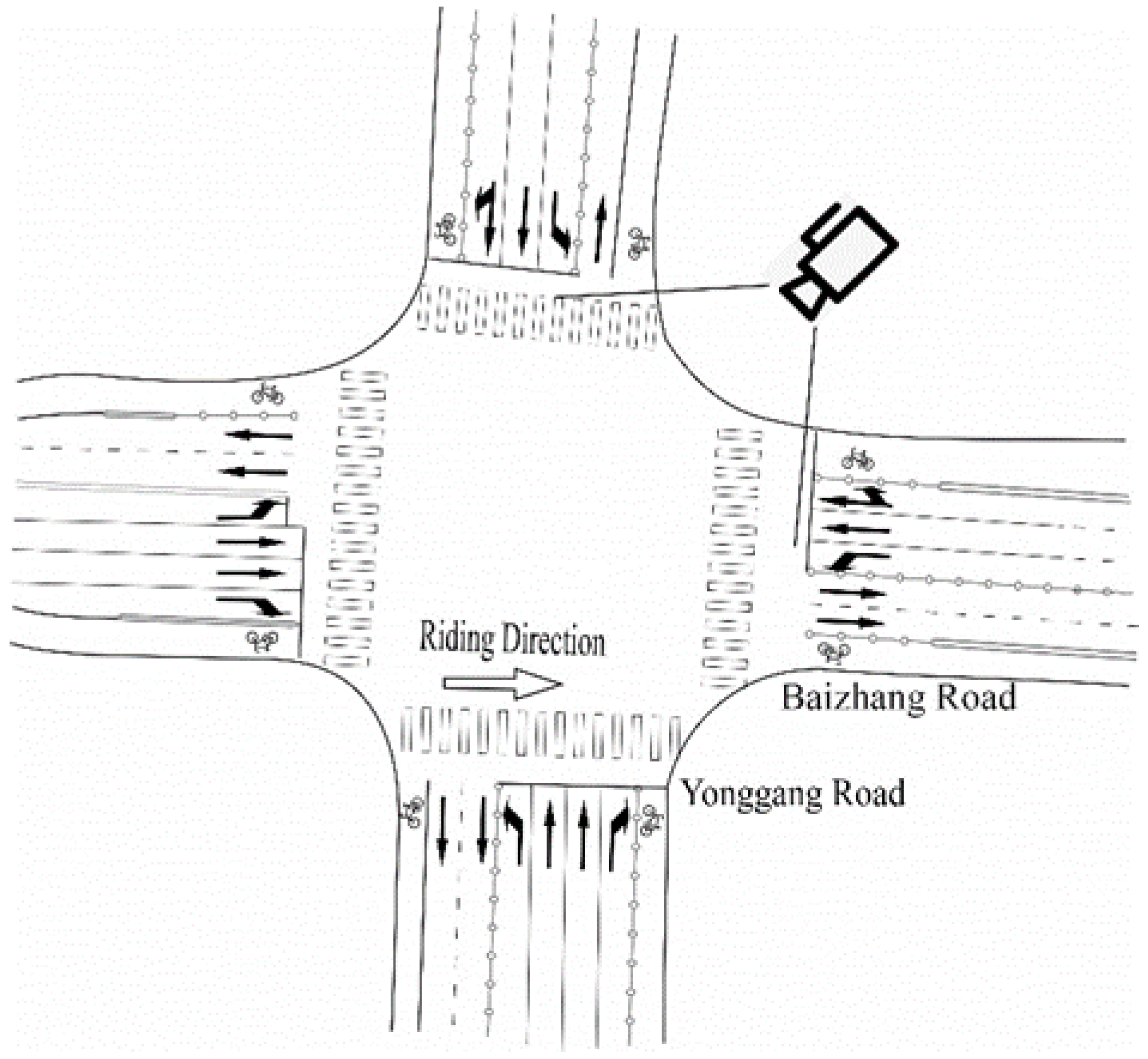
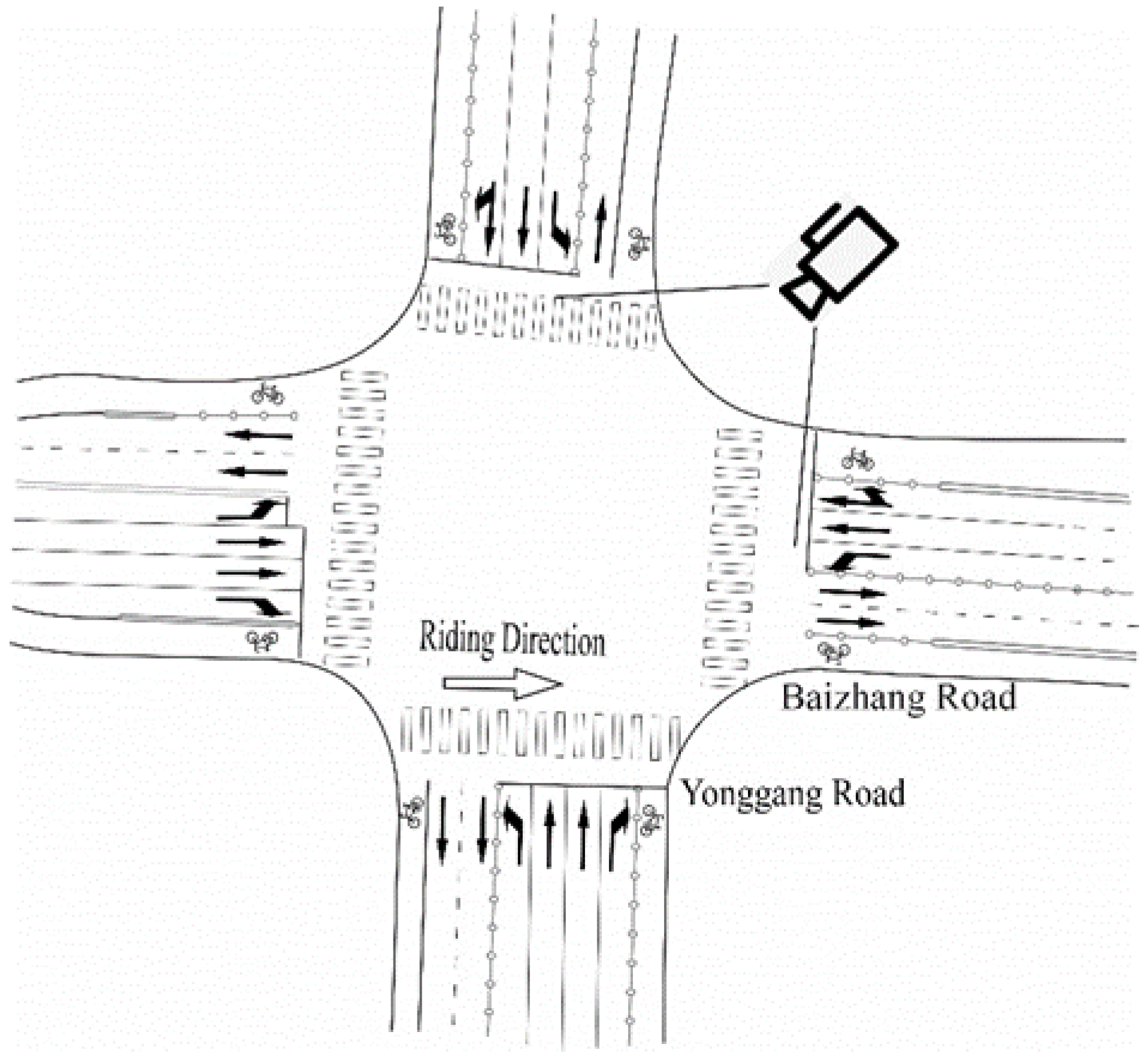
3.1. Data Collection
3.2. The Non-Motorized Vehicle Delay Model at Signalized Intersection Crosswalks
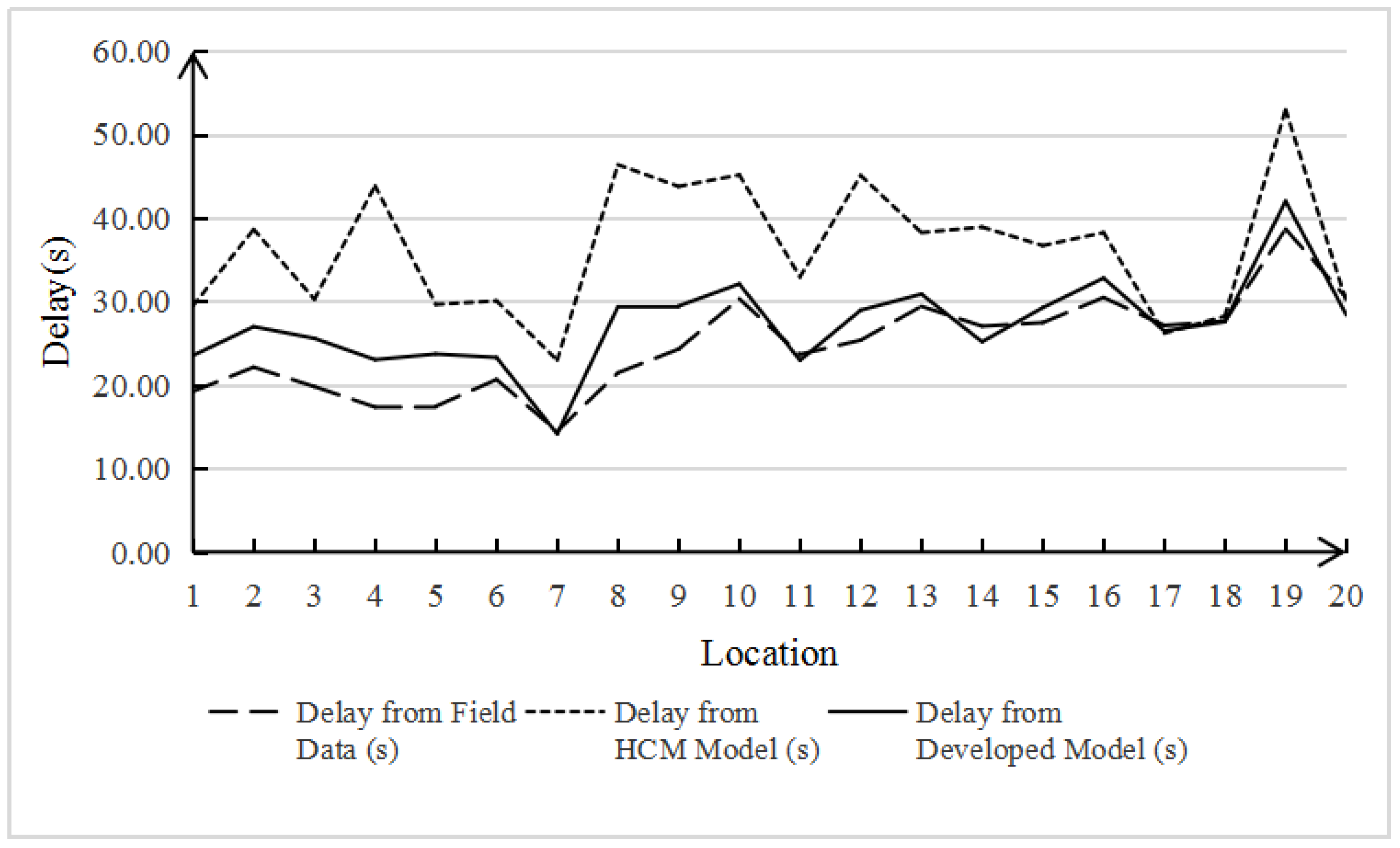
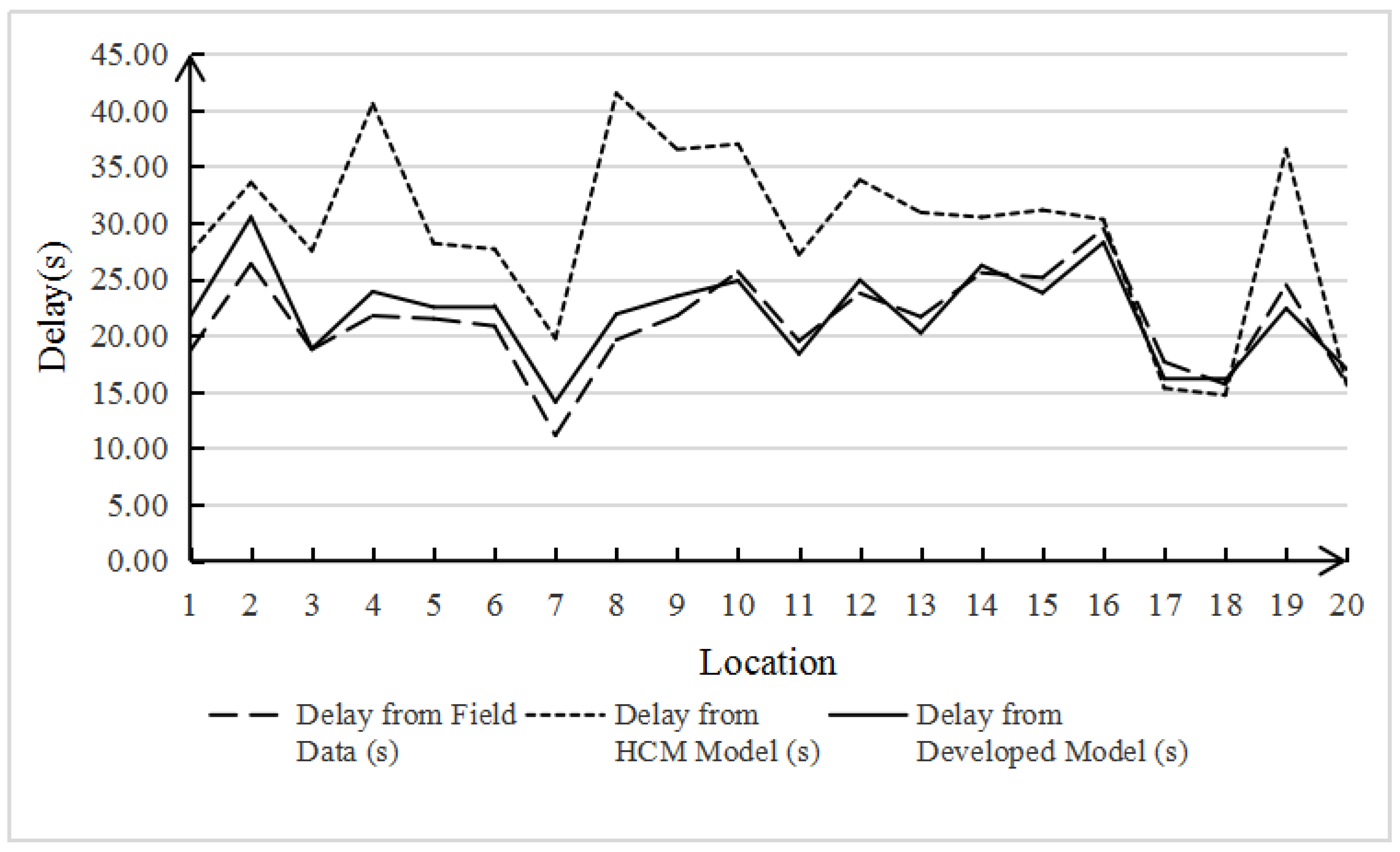
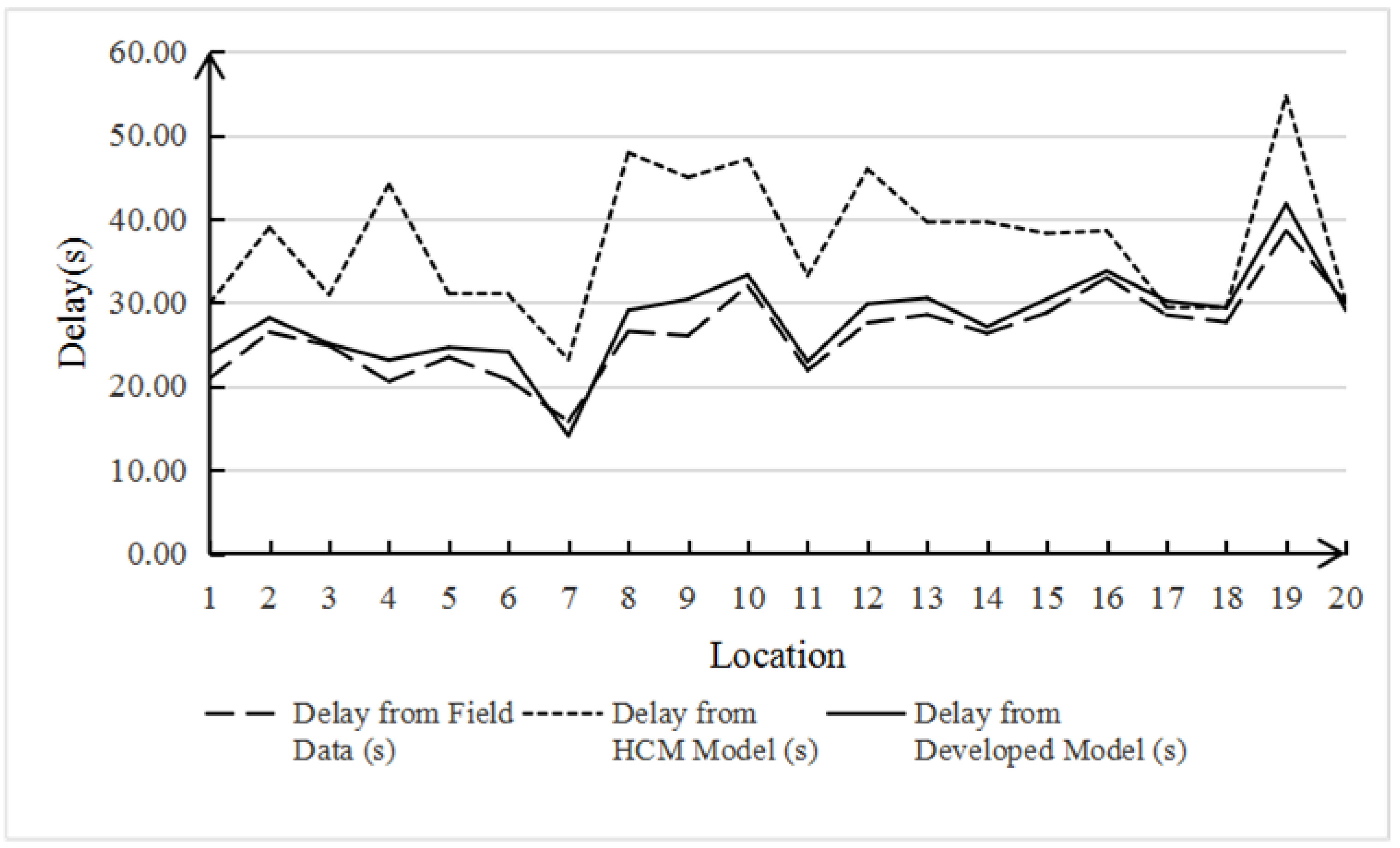
3.3. The Delay Model Results of the Non-Motorized Vehicle
4. Methodology for LOS Model of the Non-Motorized Vehicle at Signalized Intersection
4.1. Questionnaire of Rider’s Perceptions
4.2. Representation of Survey Results by a Single LOS Grade
4.3. Linear Regression Tests
- , are the volume of electric bicycles and bicycles, respectively,
- is the average speed of bicycles passing through,
- is the number of conflicts between non-motor vehicles and pedestrians,
- is the number of conflicts between non-motor vehicles and right-turning motor vehicles, and
- is the delay of non-motorized vehicles passing the intersection calculated by the delay model.
4.4. Limitations of Linear Regression Model
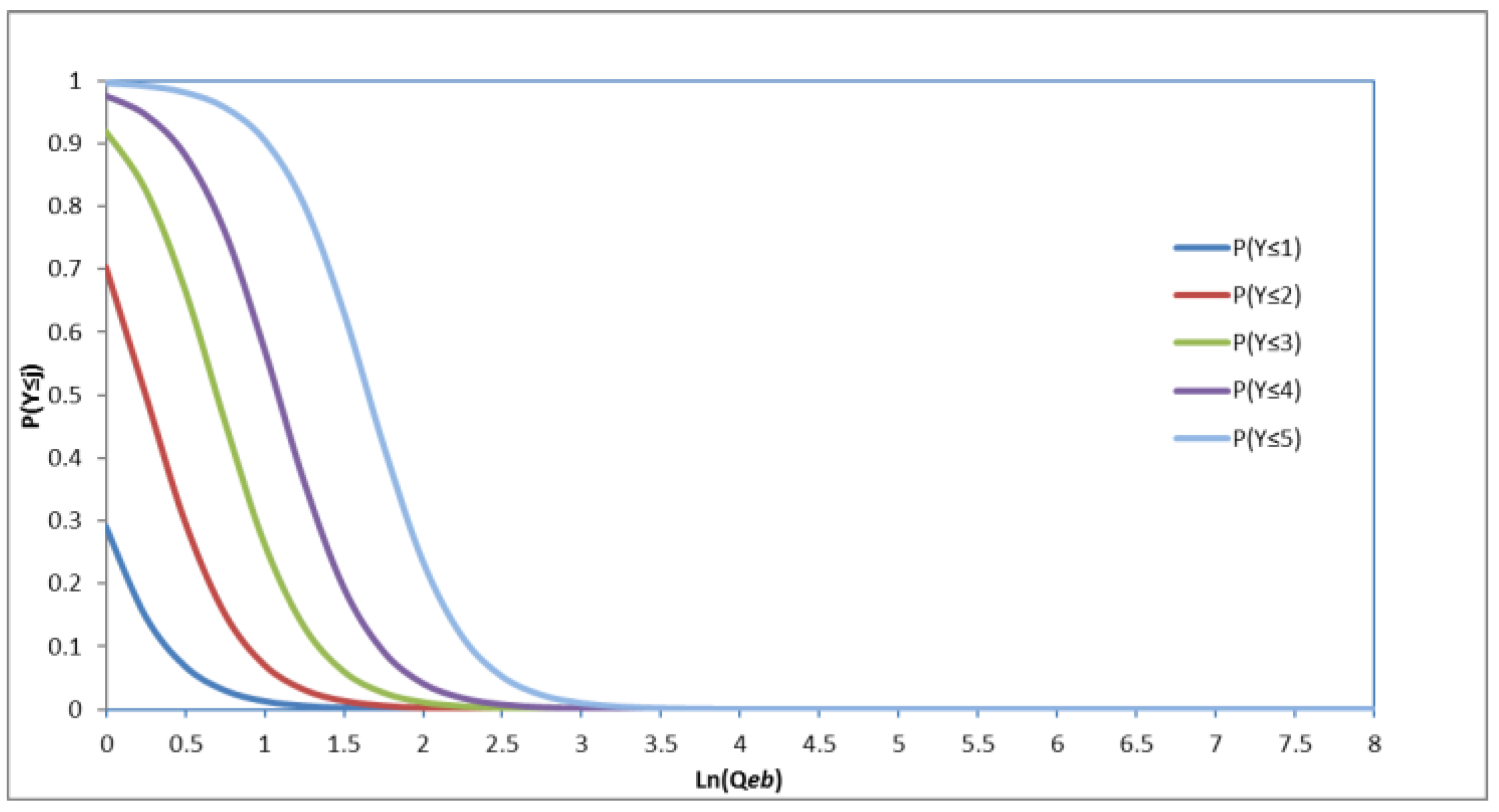
4.5. Cumulative Logistic Regression
- is the probability,
- is ordered variables,
- is the score of LOS, and
- are explanatory variables of the influential factors.
5. Recommended LOS Model of the Non-Motorized Vehicle
- is the probability the intersection received an LOS grade J or worse,
- denotes the maximum numerical threshold for LOS grade J (Table 7),
- is the calibration parameters for attributes (Table 7), and
- is the attributes (k) of the segment or facility (Table 7).
6. Application and Performance of the LOS Model of the Non-Motorized Vehicle
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Click “√” in the corresponding space below: | ||||||||||||
| Background information | ||||||||||||
| Gender | Male | Female | ||||||||||
| Age | ≤20 | 21–39 | 40–59 | ≥60 | ≤20 | 21–39 | 40–59 | ≥60 | ||||
| Evaluation information | ||||||||||||
| You are asked to evaluate this intersection according to your feeling, consider the running attributes of the road and your riding experience, and evaluate the intersection in the video clip from the following factors: |  | |||||||||||
| excellent | good | general | not-good | very bad | terrible | |||||||
| (1) Ride space for the non-motorized vehicles (left and right and front) | ||||||||||||
| (2) Ability to pass or overtake during cycling | ||||||||||||
| (3) Impact of right- turning motor vehicles | ||||||||||||
| (4) Other interference | ||||||||||||
| According to the above feelings, score the video, scoring standard: ● excellent = 1; good = 2; general = 3; not-good = 4; very bad = 5; terrible = 6. | ||||||||||||
| excellent | Good | general | not-good | very bad | terrible | |||||||
References
- Ye, X.; Chen, J.; Jiang, G.; Yan, X. Modeling Pedestrian Level of Service at Signalized Intersection Crosswalks under Mixed Traffic Conditions. Transp. Res. Rec. 2015, 2512, 46–55. [Google Scholar] [CrossRef]
- Wang, T.; Xie, S.; Ye, X.; Yan, X.; Chen, J.; Li, W. Analyzing E-Bikers’ Risky Riding Behaviors, Safety Attitudes, Risk Perception, and Riding Confidence with the Structural Equation Model. Int J Environ Res Public Health. 2020, 17, 4763. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.L. Research on Urban Bicycle Road Service Level. Master’s Thesis, Beijing University of Civil Engineering and Architecture, Beijing, China, 2014. [Google Scholar]
- Han, H. Research on Evaluation Method of Mixed-line the Non-motorized Vehicle Service Level. Traffic Transp. (Acad. Ed.) 2014, 2, 125–129. [Google Scholar]
- Cao, S.Q. Research on the Service Level of the Non-Motorized Vehicle of Road Sections under Mixed Traffic Flow Conditions. Master’s Thesis, Beijing Industry University, Beijing, China, 2015. [Google Scholar]
- Yu, H.; Chen, J.; Xie, Z.Q. Bicycle-Pedestrian Sharing Service Level Research. City Traffic. 2012, 10, 75–79. [Google Scholar] [CrossRef]
- Yan, X.; Wang, T.; Ye, X.; Chen, J.; Yang, Z.; Bai, H. Recommended Widths for Separated Bicycle Lanes Considering Abreast Riding and Overtaking. Sustainability 2018, 10, 3127. [Google Scholar] [CrossRef] [Green Version]
- Jin, S.; Qu, X.; Zhou, D.; Xu, C.; Ma, D.; Wang, D. Estimating cycleway capacity and bicycle equivalent unit for electric bicycles. Transp. Res. Part A Policy Pract. 2015, 77, 225–248. [Google Scholar] [CrossRef]
- Yan, X.; Wang, T.; Chen, J.; Ye, X.; Yang, Z.; Bai, H. Analysis of the Characteristics and Number of Bicycle-Passenger Conflicts at Bus Stops for Improving Safety. Sustainability 2019, 11, 5263. [Google Scholar] [CrossRef] [Green Version]
- Elias, A. Automobile-Oriented or Complete Street? Transp. Res. Rec. J. Transp. Res. Board 2011, 2257, 80–86. [Google Scholar] [CrossRef]
- Landis, B.W.; Vattikuti, V.R.; Ottenberg, R.M.; Petritsch, T.A.; Guttenplan, M.; Crider, L.B. Intersection Level of Service for the Bicycle Through Movement. Transp. Res. Rec. J. Transp. Res. Board 2003, 1828, 101–106. [Google Scholar] [CrossRef]
- Kang, K.; Lee, K. Development of a bicycle level of service model from the user’s perspective. KSCE J. Civ. Eng. 2012, 16, 1032–1039. [Google Scholar] [CrossRef]
- Griswold, J.B.; Yu, M.; Filingeri, V.; Grembek, O.; Walker, J.L. A behavioral modeling approach to bicycle level of service. Transp. Res. Part A Policy Pract. 2018, 116, 166–177. [Google Scholar] [CrossRef]
- Liu, Q.; Homma, R.; Iki, K. Utilizing Bicycle Compatibility Index and Bicycle Level of Service for Cycleway networks. MATEC Web Conf. 2019, 259, 03005. [Google Scholar] [CrossRef]
- Beura, S.K.; Kumar, N.K.; Bhuyan, P.K. Level of Service for Bicycle Through Movement at Signalized Intersections Operating Under Heterogeneous Traffic Flow Conditions. Transp. Dev. Econ. 2017, 3, 21. [Google Scholar] [CrossRef]
- Majumdar, B.B.; Mitra, S. Development of Level of Service Criteria for Evaluation of Bicycle Suitability. J. Urban Plan. Dev. 2018, 144, 04018012. [Google Scholar] [CrossRef]
- Beura, S.K.; Chellapilla, H.; Bhuyan, P.K. Urban road segment level of service based on bicycle users’ perception under mixed traffic conditions. J. Mod. Transp. 2017, 25, 90–105. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Wang, Z.; Yang, J.; Wang, J. Pedestrian delay estimation at signalized intersections in developing cities. Transp. Res. Part A Policy Pract. 2005, 39, 61–73. [Google Scholar] [CrossRef]
- Ye, X.; Yan, X.; Chen, J.; Wang, T.; Yang, Z. Impact of Curbside Parking on Bicycle Lane Capacity in Nanjing, China. Transp. Res. Rec. 2018, 2672, 120–129. [Google Scholar] [CrossRef]
- Ye, X.; Yang, C.; Wang, T.; Yan, X.; Li, S.; Chen, J. Research on parking app choice behavior based on MNL. Travel Behav. Soc. 2021, 25, 174–182. [Google Scholar] [CrossRef]
- Wang, J.; Gong, S.; Peeta, S.; Lu, L. A real-time deployable model predictive control-based cooperative platooning approach for connected and autonomous vehicles. Transp. Res. Part B Methodol. 2019, 128, 271–301. [Google Scholar] [CrossRef]
| Location | Cycle Time (s) | Green Time (s) | Number of the Non-Motorized Vehicles Arriving during Non-Green Phase | Number of the Non-Motorized Vehicles Arriving During Green Phase | Signal Compliance Rate | |||
|---|---|---|---|---|---|---|---|---|
| E-Bike | Bicycle | E-Bike | Bicycle | E-Bike | Bicycle | |||
| 1 | 150 | 60 | 179 | 25 | 157 | 23 | 0.8989 | 0.9122 |
| 2 | 150 | 50 | 257 | 16 | 223 | 8 | 0.8696 | 0.9090 |
| 3 | 150 | 60 | 240 | 35 | 192 | 40 | 0.9125 | 0.8795 |
| 4 | 150 | 40 | 146 | 12 | 190 | 12 | 0.8864 | 0.8636 |
| 5 | 150 | 60 | 161 | 78 | 151 | 66 | 0.9297 | 0.8854 |
| 6 | 150 | 60 | 214 | 54 | 194 | 42 | 0.8860 | 0.8733 |
| 7 | 125 | 55 | 271 | 15 | 389 | 15 | 0.8392 | 0.8000 |
| 8 | 150 | 40 | 219 | 40 | 237 | 56 | 0.9666 | 0.9290 |
| 9 | 185 | 70 | 405 | 43 | 475 | 57 | 0.9090 | 0.9302 |
| 10 | 185 | 70 | 498 | 75 | 502 | 85 | 0.8872 | 0.8909 |
| 11 | 150 | 60 | 335 | 11 | 385 | 13 | 0.8987 | 0.8847 |
| 12 | 150 | 50 | 417 | 25 | 495 | 23 | 0.9363 | 0.9433 |
| 13 | 150 | 55 | 538 | 58 | 422 | 62 | 0.9125 | 0.8571 |
| 14 | 150 | 55 | 488 | 35 | 532 | 25 | 0.8563 | 0.9333 |
| 15 | 150 | 55 | 472 | 83 | 338 | 67 | 0.8667 | 0.8744 |
| 16 | 150 | 55 | 580 | 19 | 380 | 11 | 0.8989 | 0.9326 |
| 17 | 125 | 65 | 738 | 100 | 612 | 80 | 0.8875 | 0.9112 |
| 18 | 125 | 65 | 775 | 34 | 695 | 26 | 0.8889 | 0.9231 |
| 19 | 185 | 70 | 842 | 44 | 718 | 56 | 0.9136 | 0.8667 |
| 20 | 125 | 65 | 978 | 120 | 972 | 90 | 0.9053 | 0.9217 |
| Location | Delay from Field Data (s) | Delay from HCM Model (s) | Delay from Developed Model (s) | |||
|---|---|---|---|---|---|---|
| E-Bike | Bicycle | E-Bike | Bicycle | E-Bike | Bicycle | |
| 1 | 19.22 | 18.63 | 29.4760 | 27.3279 | 23.5257 | 21.6394 |
| 2 | 22.13 | 26.35 | 38.6313 | 33.5635 | 26.9800 | 30.5092 |
| 3 | 19.8 | 18.76 | 30.2691 | 27.5159 | 25.5746 | 18.8224 |
| 4 | 17.35 | 21.74 | 43.8406 | 40.5651 | 23.0260 | 23.8855 |
| 5 | 17.44 | 21.48 | 29.6424 | 28.1585 | 23.7015 | 22.5077 |
| 6 | 20.65 | 20.83 | 30.0668 | 27.6639 | 23.2875 | 22.6490 |
| 7 | 14.46 | 11.13 | 22.9688 | 19.7315 | 14.1332 | 14.0940 |
| 8 | 21.45 | 19.6 | 46.3754 | 41.4708 | 29.3570 | 21.8900 |
| 9 | 24.29 | 21.75 | 43.7672 | 36.5037 | 29.4550 | 23.4885 |
| 10 | 30.31 | 25.65 | 45.1494 | 36.9758 | 32.0905 | 24.8406 |
| 11 | 23.66 | 19.5 | 32.9268 | 27.1630 | 22.9470 | 18.3571 |
| 12 | 25.36 | 23.74 | 45.0799 | 33.7968 | 28.9488 | 24.9067 |
| 13 | 29.41 | 21.65 | 38.2415 | 30.9075 | 30.8778 | 20.2167 |
| 14 | 27.04 | 25.55 | 38.9009 | 30.4899 | 25.1636 | 26.2096 |
| 15 | 27.46 | 25.13 | 36.6870 | 31.1207 | 29.2554 | 23.7746 |
| 16 | 30.47 | 29.47 | 38.2415 | 30.2852 | 32.7922 | 28.2440 |
| 17 | 27.13 | 17.65 | 26.1818 | 15.3191 | 26.4636 | 16.1560 |
| 18 | 27.64 | 15.67 | 28.2353 | 14.6939 | 27.5669 | 16.0130 |
| 19 | 38.66 | 24.48 | 52.9530 | 36.5037 | 42.0056 | 22.3941 |
| 20 | 30.45 | 15.65 | 30.0000 | 15.4839 | 28.3777 | 16.9899 |
| Site ID | Number of Participants | Number of Males | Number of Females | Percentage by Age Group (Years) | Average User Score | |||
|---|---|---|---|---|---|---|---|---|
| ≤20 | 21–39 | 40–59 | ≥60 | |||||
| 1 | 20 | 8 | 12 | 4 | 8 | 6 | 2 | 1.30 |
| 2 | 20 | 13 | 7 | 2 | 9 | 5 | 4 | 1.45 |
| 3 | 20 | 10 | 10 | 4 | 7 | 7 | 2 | 2.45 |
| 4 | 20 | 9 | 11 | 5 | 10 | 4 | 1 | 2.00 |
| 5 | 20 | 11 | 9 | 3 | 5 | 7 | 5 | 2.95 |
| 6 | 20 | 12 | 8 | 5 | 8 | 4 | 3 | 2.60 |
| 7 | 20 | 9 | 11 | 3 | 9 | 6 | 2 | 3.80 |
| 8 | 20 | 8 | 12 | 4 | 7 | 7 | 2 | 3.85 |
| 9 | 20 | 10 | 10 | 5 | 6 | 5 | 4 | 3.95 |
| 10 | 20 | 10 | 10 | 2 | 11 | 6 | 1 | 3.80 |
| 11 | 20 | 12 | 8 | 3 | 7 | 9 | 1 | 3.55 |
| 12 | 20 | 14 | 6 | 4 | 6 | 7 | 3 | 3.40 |
| 13 | 20 | 9 | 11 | 1 | 8 | 6 | 5 | 3.80 |
| 14 | 20 | 7 | 13 | 3 | 10 | 5 | 2 | 4.50 |
| 15 | 20 | 12 | 8 | 4 | 5 | 7 | 4 | 4.25 |
| 16 | 20 | 11 | 9 | 2 | 10 | 6 | 2 | 4.20 |
| 17 | 20 | 8 | 12 | 3 | 7 | 5 | 5 | 4.50 |
| 18 | 20 | 10 | 10 | 4 | 7 | 6 | 3 | 4.30 |
| 19 | 20 | 14 | 6 | 3 | 8 | 6 | 3 | 4.30 |
| 20 | 20 | 10 | 10 | 4 | 6 | 7 | 3 | 4.30 |
| LOS | Results by Distribution | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| A | 60% | 10% | NA | NA | NA | NA |
| B | 26% | 67% | 20% | 18% | NA | NA |
| C | 14% | 23% | 35% | 25% | 14% | 8% |
| D | NA | 10% | 30% | 34% | 28% | 19% |
| E | NA | NA | 15% | 23% | 40% | 36% |
| F | NA | NA | NA | NA | 18% | 37% |
| 1 | B | C | D | D | E | F |
| 2 | B | B | C | D | E | E |
| 3 | A | B | C | D | E | F |
| LOS | Numerical Value | LOS 1, Straight Thresholds | LOS 2, Thresholds Shifted to Midpoints | LOS 3, Compressed Ranges |
|---|---|---|---|---|
| A | 1 | Mean ≤ 1.00 | Mean ≤ 1.50 | Mean ≤ 2.00 |
| B | 2 | 1.00 < Mean ≤ 2.00 | 1.50 < Mean ≤ 2.50 | 2.00 < Mean ≤ 2.75 |
| C | 3 | 2.00 < Mean ≤ 3.00 | 2.50 < Mean ≤ 3.50 | 2.75 < Mean ≤ 3.50 |
| D | 4 | 3.00 < Mean ≤ 4.00 | 3.50 < Mean ≤ 4.50 | 3.50 < Mean ≤ 4.25 |
| E | 5 | 4.00 < Mean ≤ 5.00 | 4.50 < Mean ≤ 5.50 | 4.25 < Mean ≤ 5.00 |
| F | 6 | 5.00 < Mean | 5.50 < Mean | 5.00 < Mean |
| Model | Model Estimate | Coefficient | SE | Sig |
|---|---|---|---|---|
| 2.132 | 0.373 | 0.000 | ||
| 0.120 | 0.127 | 0.044 | ||
| 0.071 | 0.109 | 0.013 | ||
| −1.171 | 0.415 | 0.005 | ||
| 0.761 | 0.284 | 0.008 | ||
| 0.039 | 0.017 | 0.023 | ||
| Constant | −9.906 | 1.139 | 0.000 |
| Parameter | Estimate | SE | Wald | DF | Sig | 95% Confidence Interval | |
|---|---|---|---|---|---|---|---|
| Lower Bound | Upper Bound | ||||||
| Intercept 1 | 19.434 | 2.101 | 85.594 | 1 | 0.000 | 15.317 | 23.551 |
| Intercept 2 | 21.193 | 2.133 | 98.767 | 1 | 0.000 | 17.041 | 25.373 |
| Intercept 3 | 22.743 | 2.176 | 109.193 | 1 | 0.000 | 18.477 | 27.009 |
| Intercept 4 | 24.068 | 2.207 | 118.951 | 1 | 0.000 | 19.743 | 28.393 |
| Intercept 5 | 26.038 | 2.241 | 134.957 | 1 | 0.000 | 21.645 | 30.431 |
| 3.444 | 0.639 | 29.063 | 1 | 0.000 | 2.192 | 4.697 | |
| 0.666 | 0.175 | 14.523 | 1 | 0.000 | 0.324 | 1.009 | |
| 0.319 | 0.195 | 2.673 | 1 | 0.102 | −0.063 | 0.702 | |
| 0.040 | 0.182 | 0.049 | 1 | 0.826 | −0.316 | 0.396 | |
| 0.173 | 0.210 | 0.683 | 1 | 0.408 | −0.238 | 0.584 | |
| −1.796 | 0.692 | 6.734 | 1 | 0.009 | −3.153 | −0.440 | |
| 1.257 | 0.478 | 6.913 | 1 | 0.009 | 0.320 | 2.193 | |
| −0.067 | 0.028 | 5.6453 | 1 | 0.018 | −0.122 | −0.012 | |
| Survey Number | Values by Variable | Survey LOS | Linear Model LOS | Logistic Model LOS | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
(pcu/h) | (e-bike/h) | (bicycle/h) | (m/s) | (m/s) | (s) | ||||||
| 1 | 120 | 336 | 48 | 113 | 75 | 3.96 | 3.22 | 20.92 | A | A | B |
| 2 | 144 | 480 | 24 | 175 | 121 | 5.16 | 2.73 | 26.44 | A | B | B |
| 3 | 192 | 432 | 75 | 196 | 106 | 4.02 | 3.22 | 24.83 | B | B | B |
| 4 | 168 | 336 | 24 | 120 | 55 | 5.79 | 2.35 | 20.54 | A | A | A |
| 5 | 216 | 312 | 144 | 103 | 89 | 4.84 | 2.94 | 23.46 | C | B | B |
| 6 | 144 | 408 | 96 | 250 | 206 | 3.89 | 2.27 | 20.74 | B | B | B |
| 7 | 450 | 660 | 30 | 275 | 160 | 5.19 | 3.29 | 15.77 | D | B | D |
| 8 | 264 | 456 | 96 | 152 | 142 | 4.91 | 2.56 | 26.53 | D | C | C |
| 9 | 80 | 880 | 100 | 275 | 125 | 4.35 | 3.34 | 26.02 | D | C | D |
| 10 | 340 | 1000 | 160 | 390 | 220 | 5.87 | 4.50 | 31.98 | D | D | E |
| 11 | 168 | 720 | 24 | 214 | 150 | 4.91 | 2.50 | 21.88 | D | C | D |
| 12 | 72 | 912 | 48 | 394 | 122 | 4.85 | 2.80 | 27.55 | C | C | C |
| 13 | 390 | 960 | 120 | 374 | 176 | 4.94 | 4.03 | 28.53 | D | D | D |
| 14 | 120 | 1020 | 60 | 360 | 203 | 4.14 | 3.63 | 26.30 | E | D | D |
| 15 | 450 | 810 | 150 | 290 | 130 | 5.01 | 3.64 | 28.77 | D | C | D |
| 16 | 240 | 960 | 30 | 268 | 182 | 4.15 | 2.90 | 32.97 | D | D | C |
| 17 | 180 | 1350 | 180 | 450 | 202 | 4.04 | 3.25 | 28.48 | E | E | E |
| 18 | 360 | 1470 | 60 | 481 | 214 | 3.93 | 2.22 | 27.65 | E | D | E |
| 19 | 400 | 1560 | 100 | 441 | 179 | 4.98 | 2.65 | 38.57 | E | E | E |
| 20 | 270 | 1950 | 210 | 584 | 256 | 3.61 | 2.46 | 29.88 | E | E | E |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, X.; Zhu, Y.; Wang, T.; Yan, X.; Chen, J.; Ran, B. Level of Service Model of the Non-Motorized Vehicle Crossing the Signalized Intersection Based on Riders’ Perception Data. Int. J. Environ. Res. Public Health 2022, 19, 4534. https://doi.org/10.3390/ijerph19084534
Ye X, Zhu Y, Wang T, Yan X, Chen J, Ran B. Level of Service Model of the Non-Motorized Vehicle Crossing the Signalized Intersection Based on Riders’ Perception Data. International Journal of Environmental Research and Public Health. 2022; 19(8):4534. https://doi.org/10.3390/ijerph19084534
Chicago/Turabian StyleYe, Xiaofei, Yi Zhu, Tao Wang, Xingchen Yan, Jun Chen, and Bin Ran. 2022. "Level of Service Model of the Non-Motorized Vehicle Crossing the Signalized Intersection Based on Riders’ Perception Data" International Journal of Environmental Research and Public Health 19, no. 8: 4534. https://doi.org/10.3390/ijerph19084534
APA StyleYe, X., Zhu, Y., Wang, T., Yan, X., Chen, J., & Ran, B. (2022). Level of Service Model of the Non-Motorized Vehicle Crossing the Signalized Intersection Based on Riders’ Perception Data. International Journal of Environmental Research and Public Health, 19(8), 4534. https://doi.org/10.3390/ijerph19084534