
Evaluation of the Influence of Road Geometry on Overtaking Cyclists on Two-Lane Rural Roads





Abstract
1. Introduction
2. Materials and Methods
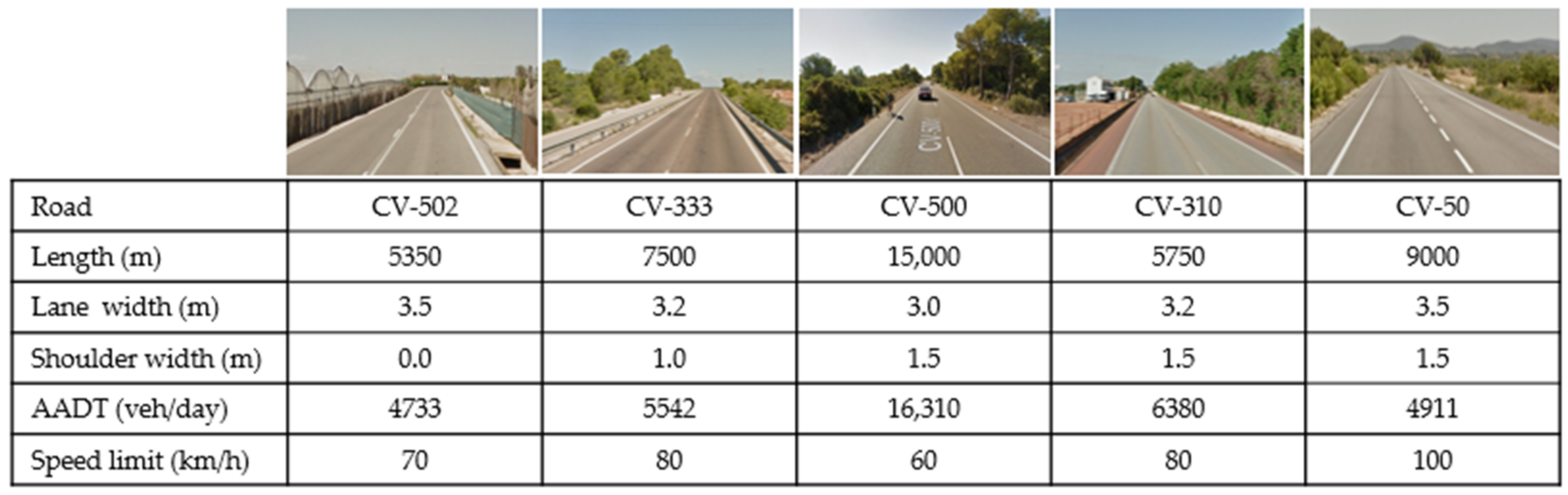
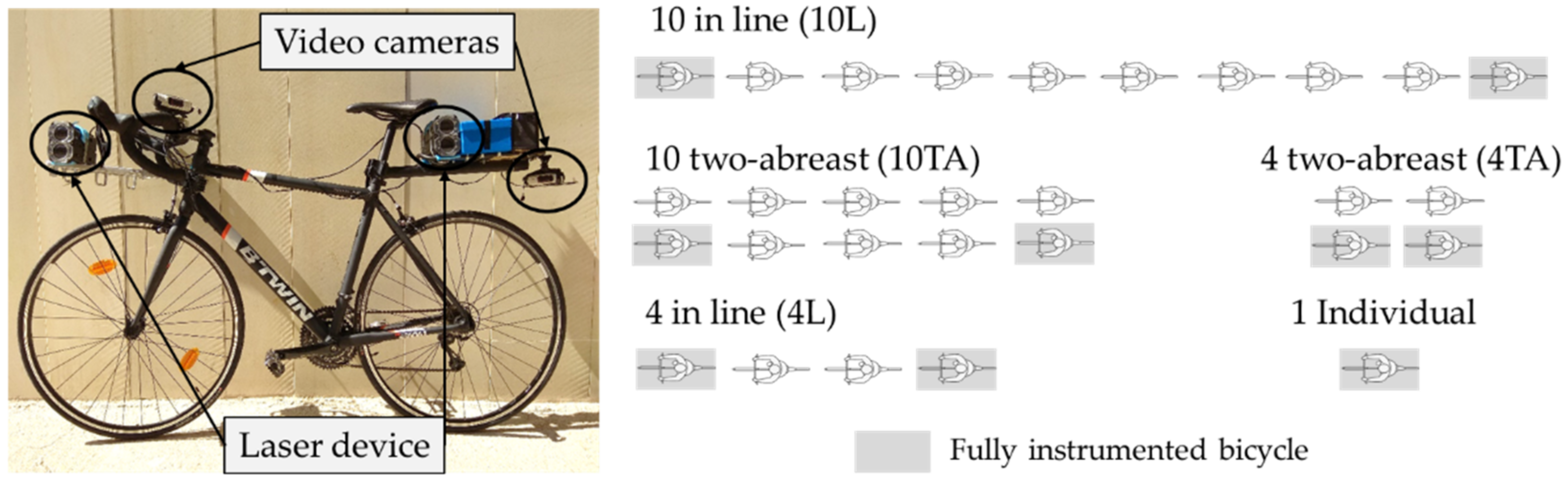
2.1. Data Collection
2.2. Data Reduction
2.3. Model Development
- Centre-line with 2 categories was transformed into 1 dummy variable: solid line (included into the models), with dashed line being the reference category.
- Horizontal alignment with 3 categories was transformed into 2 dummy variables: tangent and right curve (included in the models), with left curve being the reference category.
- Opposing lane invasion with 2 categories was transformed into 1 dummy variable: invasion (included into the models), with no invasion being the reference category.
- Configuration with 2 categories was transformed into 1 dummy variable: in-line (included into the models), with two-abreast being the reference category.
3. Results
3.1. Data Description
3.2. Lateral Clearance and Overtaking Vehicle Speed
3.3. Model Development and Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ministerio Cultura y Deporte. Encuesta de Hábitos Deportivos en España 2020. Síntesis de resultados. Boletín Of. del Estado 25. 2021. Available online: https://www.culturaydeporte.gob.es/dam/jcr:07b62374-bfe9-4a65-9e7e-03a09c8778c3/encuesta-de-habitos-deportivos-2020.pdf (accessed on 15 June 2022).
- Dirección General de Tráfico. Las principales cifras de la siniestralidad vial 2019 1–226. 2019. Available online: https://www.dgt.es/export/sites/web-DGT/.galleries/downloads/dgt-en-cifras/publicaciones/Principales_Cifras_Siniestralidad/09_PRINCIPALES-CIFRAS-SINIESTRALIDAD-2019-ES__DGT.pdf (accessed on 15 June 2022).
- Rubie, E.; Haworth, N.; Twisk, D.; Yamamoto, N. Influences on lateral passing distance when motor vehicles overtake bicycles: A systematic literature review. Trans. Rev. 2020, 40, 754–773. [Google Scholar] [CrossRef]
- Chapman, J.; Noyce, D.A. Influence of roadway geometric elements on driver behavior when overtaking bicycles on rural roads. J. Traffic Transp. Eng. 2014, 1, 28–38. [Google Scholar] [CrossRef][Green Version]
- García, A.; Angel-Domenech, A.; Llorca, C.; Agustín-Gómez, F.; Ferrer, V. Effects of road geometry on the interaction between bicyclists and motor vehicles on two-way rural highways. In Proceedings of the 5th International Symposium on Highway Geometric Design, Vancouver, Canada, 22–24 June 2015. [Google Scholar]
- Bella, F.; Silvestri, M. Interaction driver–bicyclist on rural roads: Effects of cross-sections and road geometric elements. Accid. Anal. Prev. 2017, 102, 191–201. [Google Scholar] [CrossRef] [PubMed]
- Trenchard, H.; Richardson, A.; Ratamero, E.; Perc, M. Collective Behavior and the Identification of Phases in Bicycle Pelotons. Phys. A Stat. Mech. Its Appl. 2014, 405, 92–103. [Google Scholar] [CrossRef]
- Fraser, M.L.; Meuleners, L.B. Risk factors for unsafe events involving a motor vehicle for group riders (cyclists): A naturalistic case-crossover study. Accid. Anal. Prev. 2021, 146, 105758. [Google Scholar] [CrossRef]
- López, G.; Pérez-Zuriaga, A.M.; Moll, S.; García, A. Analysis of Overtaking Maneuvers to Cycling Groups on Two-Lane Rural Roads using Objective and Subjective Risk. Transp. Res. Rec. 2020, 2674, 148–160. [Google Scholar] [CrossRef]
- Pérez-Zuriaga, A.M.; Moll, S.; López, G.; García, A. Driver Behavior When Overtaking Cyclists Riding in Different Group Configurations on Two-Lane Rural Roads. Int. J. Environ. Res. Public Health 2021, 18, 12797. [Google Scholar] [CrossRef] [PubMed]
- Ministerio del Interior-Gobierno de España. Real Decreto 1428/2003, de 21 de noviembre, por el que se aprueba el Reglamento General de Circulación. 2003. Available online: https://www.boe.es/eli/es/rd/2003/11/21/1428/con (accessed on 23 December 2021).
- Llorca, C.; Angel-Domenech, A.; Agustin-Gomez, F.; Garcia, A. Motor vehicles overtaking cyclists on two-lane rural roads: Analysis on speed and lateral clearance. Saf. Sci. 2017, 92, 302–310. [Google Scholar] [CrossRef]
- Mecheri, S.; Rosey, F.; Lobjois, R. Manipulating constraints on driver-cyclist interactions in a fixed travel space: Effects of road configuration on drivers’ overtaking behavior. Saf. Sci. 2020, 123, 104570. [Google Scholar] [CrossRef]
- Shackel, S.C.; Parkin, J. Influence of road markings, lane widths and driver behaviour on proximity and speed of vehicles overtaking cyclists. Accid. Anal. Prev. 2014, 73, 100–108. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Code | Variable Type | Values |
|---|---|---|---|
| Lane width | Lw | quantitative discrete | 3, 3.2 and 3.5 |
| Shoulder width | Sw | quantitative discrete | 0, 1 and 1.5 |
| Lane + Shoulder width | LSw | quantitative discrete | 3.5, 4.2, 4.5, 4.7 and 5 |
| Centre-line | CL | qualitative | Solid line (SL), Dashed line (DL) |
| Horizontal alignment | HA | qualitative | Tangent (T), Right curve (RCur), Left curve (LCur) |
| Speed limit | SL | quantitative discrete | 60, 70, 80 and 100 km/h |
| Opposing lane invasion | Inv | qualitative | Invasion (Inv), No invasion (NInv) |
| Configuration | Conf | qualitative | In-line (IL), Two-abreast (TA) |
| 1 Cyclist | 4 Cyclists | 10 Cyclists | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Lateral Clearance (m) | Overtaking Vehicle Speed (km/h) | Lateral Clearance (m) | Overtaking Vehicle Speed (km/h) | Lateral Clearance (m) | Overtaking Vehicle Speed (km/h) | |||||||||||
| Variables | Values | N | Mean | SD | Mean | SD | N | Mean | SD | Mean | SD | N | Mean | SD | Mean | SD |
| Lane width | 3 | 94 | 1.63 | 0.40 | 52.71 | 8.38 | 235 | 1.70 | 0.44 | 57.15 | 8.94 | 99 | 1.77 | 0.50 | 62.79 | 8.11 |
| 3.2 | 269 | 1.87 | 0.46 | 68.30 | 13.68 | 227 | 1.84 | 0.46 | 66.76 | 15.80 | 129 | 1.89 | 0.50 | 67.62 | 15.73 | |
| 3.5 | 66 | 2.00 | 0.50 | 75.58 | 18.39 | 142 | 1.93 | 0.44 | 71.51 | 15.93 | 94 | 1.94 | 0.49 | 67.30 | 14.31 | |
| Shoulder width | 0 | 28 | 1.89 | 0.45 | 66.14 | 15.33 | 63 | 1.80 | 0.40 | 66.10 | 14.62 | 36 | 1.90 | 0.46 | 63.39 | 11.38 |
| 1 | 125 | 1.95 | 0.50 | 66.09 | 16.28 | 108 | 1.93 | 0.47 | 65.08 | 15.57 | 68 | 1.96 | 0.47 | 70.85 | 16.12 | |
| 1.5 | 276 | 1.78 | 0.45 | 65.95 | 15.20 | 433 | 1.78 | 0.46 | 63.61 | 14.59 | 218 | 1.83 | 0.52 | 64.98 | 12.64 | |
| Lane + Shoulder width | 3.5 | 28 | 1.89 | 0.45 | 66.14 | 15.33 | 63 | 1.80 | 0.40 | 66.10 | 14.62 | 36 | 1.90 | 0.46 | 63.39 | 11.38 |
| 4.2 | 125 | 1.95 | 0.50 | 66.09 | 16.28 | 108 | 1.93 | 0.47 | 65.08 | 15.57 | 68 | 1.96 | 0.47 | 70.85 | 16.12 | |
| 4.5 | 94 | 1.63 | 0.40 | 52.71 | 8.38 | 235 | 1.70 | 0.44 | 57.15 | 8.94 | 99 | 1.77 | 0.50 | 62.79 | 8.11 | |
| 4.7 | 144 | 1.81 | 0.42 | 70.22 | 10.63 | 119 | 1.76 | 0.44 | 68.28 | 15.92 | 61 | 1.81 | 0.53 | 64.02 | 14.58 | |
| 5 | 38 | 2.07 | 0.53 | 82.53 | 17.50 | 79 | 2.04 | 0.44 | 75.82 | 15.69 | 58 | 1.96 | 0.52 | 69.72 | 15.45 | |
| Speed limit | 60 | 94 | 1.63 | 0.40 | 52.71 | 8.38 | 235 | 1.70 | 0.44 | 57.15 | 8.94 | 99 | 1.77 | 0.50 | 62.79 | 8.11 |
| 70 | 28 | 1.89 | 0.45 | 66.14 | 15.33 | 63 | 1.80 | 0.40 | 66.10 | 14.62 | 36 | 1.90 | 0.46 | 63.39 | 11.38 | |
| 80 | 269 | 1.87 | 0.46 | 68.30 | 13.68 | 227 | 1.84 | 0.46 | 66.76 | 15.80 | 129 | 1.89 | 0.50 | 67.62 | 15.73 | |
| 100 | 38 | 2.07 | 0.53 | 82.53 | 17.50 | 79 | 2.04 | 0.44 | 75.82 | 15.69 | 58 | 1.96 | 0.52 | 69.72 | 15.45 | |
| Centre line | Solid | 222 | 1.78 | 0.44 | 61.87 | 15.05 | 370 | 1.76 | 0.45 | 60.54 | 12.49 | 187 | 1.79 | 0.48 | 63.60 | 11.52 |
| Dashed | 207 | 1.90 | 0.49 | 70.43 | 14.75 | 234 | 1.88 | 0.46 | 69.82 | 16.28 | 135 | 1.97 | 0.51 | 69.42 | 15.29 | |
| Horizontal alignment | Tangent | 374 | 1.82 | 0.45 | 65.70 | 15.38 | 512 | 1.79 | 0.45 | 63.58 | 14.44 | 282 | 1.87 | 0.49 | 66.51 | 13.55 |
| Right curve | 32 | 1.87 | 0.65 | 70.50 | 16.32 | 41 | 1.83 | 0.41 | 66.37 | 17.26 | 16 | 1.96 | 0.54 | 67.75 | 16.20 | |
| Left curve | 23 | 2.11 | 0.43 | 64.65 | 15.93 | 51 | 1.97 | 0.50 | 67.92 | 15.59 | 24 | 1.79 | 0.57 | 59.33 | 9.20 | |
| Opposing lane invasion | No invasion | 147 | 1.48 | 0.29 | 63.65 | 14.61 | 95 | 1.45 | 0.35 | 59.93 | 12.43 | 39 | 1.37 | 0.34 | 67.51 | 14.86 |
| Invasion | 282 | 2.03 | 0.44 | 67.23 | 15.82 | 509 | 1.88 | 0.44 | 64.92 | 15.06 | 283 | 1.93 | 0.48 | 65.84 | 13.34 | |
| Configuration | In-line | 288 | 1.87 | 0.45 | 64.97 | 13.43 | 172 | 1.92 | 0.48 | 69.02 | 13.65 | |||||
| Two-abreast | 316 | 1.76 | 0.46 | 63.38 | 15.89 | 150 | 1.81 | 0.52 | 62.62 | 12.56 | ||||||
| Total | 429 | 1.84 | 0.47 | 66.00 | 15.49 | 604 | 1.81 | 0.46 | 64.14 | 14.78 | 322 | 1.87 | 0.50 | 66.04 | 13.52 | |
| GM for Lc | Lc = −0.2372 + 0.1086 × Individual + 0.4670 × Lane width + 0.1127 × Shoulder width + 0.5025 × Invasion | ||||||
|---|---|---|---|---|---|---|---|
| Parameters | Coeficient | Error | t stat | p-value | Upper 95% | Lower 95% | Model statistics |
| Intercept | −0.2372 | 0.2572 | −0.9220 | 0.3565 | −0.7413 | 0.2670 | R2 = 0.2045 |
| Individual | 0.1086 | 0.0253 | 4.2895 | <0.0001 | 0.0590 | 0.1583 | Adjusted R2 = 0.2022 |
| Lane width | 0.4670 | 0.0736 | 6.3413 | <0.0001 | 0.3227 | 0.6114 | Observations No. = 1355 |
| Shoulder width | 0.1127 | 0.0299 | 3.7741 | <0.0001 | 0.0542 | 0.1712 | DW = 1.7196 (p < 0.0001) |
| Invasion | 0.5025 | 0.0297 | 16.8963 | 0.0002 | 0.4442 | 0.5607 | F = 86.78 (p < 0.0001) |
| GM for Sv | Sv = −35.0928 + 29.7949 × Lane width + 6.6754 × Shoulder width − 6.1133 × Solid line | ||||||
| Parameters | Coeficient | Error | t stat | p-value | Upper 95% | Lower 95% | Model statistics |
| Intercept | −35.0928 | 8.4854 | −4.1357 | <0.0001 | −51.7239 | −18.4617 | R2 = 0.1717 |
| Lane width | 29.7949 | 2.4200 | 12.3121 | <0.0002 | 25.0518 | 34.5379 | Adjusted R2 = 0.1699 |
| Shoulder width | 6.6754 | 0.9426 | 7.0816 | <0.0003 | 4.8279 | 8.5230 | Observations No. = 1355 |
| Solid line | −6.1133 | 0.7865 | −7.7729 | <0.0004 | −7.6548 | −4.5718 | DW = 1.3966 (p < 0.0001) |
| F = 93.38 (p < 0.0001) | |||||||
| M1: 1 Individual | Lc = −0.0852 + 0.4454 × Lane width + 0.1144 × Shoulder width + 0.5383 × Invasion | ||||||
|---|---|---|---|---|---|---|---|
| Parameters | Coeficient | Error | t stat | p-value | Upper 95% | Lower 95% | Model statistics |
| Intercept | −0.0855 | 0.4918 | −0.1731 | 0.8626 | −1.0519 | 0.8816 | R2 = 0.3233 |
| Lane width | 0.4454 | 0.1437 | 3.0995 | 0.0021 | 0.1630 | 0.7279 | Adjusted R2 = 0.3185 |
| Shoulder width | 0.1144 | 0.05413 | 2.1142 | 0.0351 | 0.0080 | 0.2208 | Observations No. = 429 |
| Invasion | 0.5383 | 0.0415 | 12.9724 | <0.0001 | 0.4567 | 0.6198 | DW = 1.6434 (p = 0.0001) |
| F = 67.67 (p < 0.0001) | |||||||
| M2: 4 Cyclists | Lc = −0.7048 + 0.2348 × In-line + 0.5454 × Lane width + 0.1654 × Shoulder width + 0.5387 × Invasion | ||||||
| Parameters | Coeficient | Error | t stat | p-value | Upper 95% | Lower 95% | Model statistics |
| Intercept | −0.7048 | 0.3629 | −1.9422 | 0.0526 | −1.4176 | 0.0079 | R2 = 0.2164 |
| In-line | 0.2348 | 0.0350 | 6.7043 | <0.0001 | 0.1660 | 0.3035 | Adjusted R2 = 0.2116 |
| Lane width | 0.5454 | 0.1027 | 5.3082 | <0.0001 | 0.3436 | 0.7471 | Observations No. = 604 |
| Shoulder width | 0.1654 | 0.0426 | 3.8802 | 0.0001 | 0.0817 | 0.2491 | DW = 1.7960 (p = 0.0061) |
| Invasion | 0.5387 | 0.0489 | 11.0174 | <0.0001 | 0.4426 | 0.6347 | F = 41.35 (p < 0.0001) |
| M3: 10 Cyclists | Lc = 1.320 + 0.1695 × In-line − 0.1125 × Solid-line + 0.5930 × Invasion | ||||||
| Parameters | Coeficient | Error | t stat | p-value | Upper 95% | Lower 95% | Model statistics |
| Intercept | 1.320 | 0.0954 | 13.8432 | <0.0001 | 1.1324 | 1.5076 | R2 = 0.1789 |
| In-line | 0.1695 | 0.0526 | 3.2227 | 0.0014 | 0.0660 | 0.2729 | Adjusted R2 = 0.1712 |
| Solid-line | −0.1125 | 0.0526 | −2.1413 | 0.0330 | −0.2159 | −0.0091 | Observations No. = 322 |
| Invasion | 0.5930 | 0.0805 | 7.3659 | <0.0001 | 0.4346 | 0.7514 | DW = 1.8404 (p = 0.0762) |
| F = 23.10 (p < 0.0001) | |||||||
| M4: 1 Individual | Sv = −117.206 + 53.936 × Lane width + 10.687 × Shoulder width − 5.681 × Solid-line | ||||||
|---|---|---|---|---|---|---|---|
| Parameters | Coefficient | Error | t stat | p-value | Upper 95% | Lower 95% | Model statistics |
| Intercept | −117.206 | 17.1352 | −6.8401 | <0.0001 | −150.886 | −83.526 | R2 = 0.2802 |
| Lane width | 53.936 | 4.9385 | 10.9216 | <0.0001 | 44.229 | 63.643 | Adjusted R2 = 0.2752 |
| Shoulder width | 10.687 | 1.8128 | 5.8950 | <0.0001 | 7.123 | 14.250 | Observations No. = 429 |
| Solid-line | −5.681 | 1.3228 | −4.2949 | <0.0001 | −8.281 | −3.081 | DW = 1.4353 (p < 0.0001) |
| F = 55.16 (p < 0.0001) | |||||||
| M5: 4 Cyclists | Sv = −49.413 + 3.008 × In-line + 31.925 × Lane width + 7.501 × Shoulder width − 5.425 × Solid-line + 4.869 × Invasion | ||||||
| Parameters | Coefficient | Error | t stat | p-value | Upper 95% | Lower 95% | Model statistics |
| Intercept | −49.413 | 12.6885 | −3.8943 | 0.0001 | −74.333 | −24.494 | R2 = 0.2173 |
| In-line | 3.008 | 1.1350 | 2.6499 | 0.0083 | 0.779 | 5.237 | Adjusted R2 = 0.2108 |
| Lane width | 31.925 | 3.5483 | 8.9974 | <0.0001 | 24.956 | 38.894 | Observations No. = 604 |
| Shoulder width | 7.501 | 1.3793 | 5.4384 | <0.0001 | 4.793 | 10.210 | DW = 1.4203(p < 0.0001) |
| Solid-line | −5.425 | 1.2161 | −4.4613 | <0.0001 | −7.813 | −3.037 | F = 33.21 (p < 0.0001) |
| Invasion | 4.869 | 1.5908 | 3.0607 | 0.0023 | 1.745 | 7.993 | |
| M6: 10 Cyclists | Sv = 65.924 + 5.831 × In-line − 5.162 × Solid-line | ||||||
| Parameters | Coefficient | Error | t stat | p-value | Upper 95% | Lower 95% | Model statistics |
| Intercept | 65.924 | 1.4138 | 46.6304 | <0.0001 | 63.142 | 68.705 | R2 = 0.0912, Adj. R2 = 0.0855 |
| In-line | 5.831 | 1.4535 | 4.0114 | 0.0001 | 2.971 | 8.690 | Observations No. = 322 |
| Solid-line | −5.162 | 1.4694 | −3.5132 | 0.0005 | −8.053 | −2.271 | DW = 1.4543 (p < 0.0001) |
| F = 16.00 (p < 0.0001) | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
López, G.; Moll, S.; Pérez-Zuriaga, A.M.; García, A. Evaluation of the Influence of Road Geometry on Overtaking Cyclists on Two-Lane Rural Roads. Int. J. Environ. Res. Public Health 2022, 19, 9302. https://doi.org/10.3390/ijerph19159302
López G, Moll S, Pérez-Zuriaga AM, García A. Evaluation of the Influence of Road Geometry on Overtaking Cyclists on Two-Lane Rural Roads. International Journal of Environmental Research and Public Health. 2022; 19(15):9302. https://doi.org/10.3390/ijerph19159302
Chicago/Turabian StyleLópez, Griselda, Sara Moll, Ana María Pérez-Zuriaga, and Alfredo García. 2022. "Evaluation of the Influence of Road Geometry on Overtaking Cyclists on Two-Lane Rural Roads" International Journal of Environmental Research and Public Health 19, no. 15: 9302. https://doi.org/10.3390/ijerph19159302
APA StyleLópez, G., Moll, S., Pérez-Zuriaga, A. M., & García, A. (2022). Evaluation of the Influence of Road Geometry on Overtaking Cyclists on Two-Lane Rural Roads. International Journal of Environmental Research and Public Health, 19(15), 9302. https://doi.org/10.3390/ijerph19159302