Smart Environments and Social Robots for Age-Friendly Integrated Care Services



 ,
, 
.jpeg) ,
, 
 and
and 
Abstract
1. Introduction
- A survey of smart environments and robot assistive technologies that have the potential of supporting the independent living of older adults at home by implementing age-friendly care services. In this process we identify the challenges in implementing the new care service models, existing technology limitations and its acceptance by the older adults;
- A discussion on how these technologies are used for the development of two care services for older adults centered and integrated care polypharmacy management and control of wellbeing decline by social and cognitive activity engagement.
2. Smart Environments and Assistive Robots’ Technologies Review
2.1. Monitoring Daily Life Activities
2.2. ML for Behavior Assessment
- Classification techniques—The state-of-the-art literature features several methods based on different types of classifiers for monitored data streams out of which ensemble learning methods are considered the best techniques for the classification of the data streams. There are still a lot of challenges posed by the data streams in the case of the ensemble learning algorithms such as the temporal dependencies [63], the concept drifts [64] and the feature drifts [65] and those challenges may appear especially in the monitoring of the daily living activities that are situation-aware where similar monitored data can correspond to related activities such as ascending stairs or descending stairs;
- Regression techniques—The application of regression techniques for daily living activities recognition in context-aware AAL systems [66] is challenging because the identification of the activities should be performed after the beginning of the activities as soon as possible. A part of the limitations of the current approaches are the recognition of the activities after they are completed and the training of the models using offline historical data, a machine learning phase that leads to models which cannot predict the ongoing activities in a timely manner;
- Clustering techniques—The clustering of the data streams should be adaptable due to the fact that the underlying data streams may change and evolve significantly in time, like in the case of data that results from the monitoring of the older adults while they perform different types of daily living activities. In [67] are addressed in more details challenges regarding the clustering, the labeling and the interpretation of the IoT data streams dynamically, challenges that exist especially in those AAL systems that monitor the daily behavior of the older adults;
- Other ML techniques—This category considers techniques such as discovery of association rules, patterns detection, anomalies detection, etc. The abnormal human activities are very diverse [68] in nature due to a variety of aspects such as the way in which the anomalies are defined, the feature representations of the anomalies and the characteristics of the daily living activities data. The detection of the anomalies using various ML algorithms was approached in the research literature in a few studies such as the one presented in [69] where the analysis of the anomalies is not considered as the main subject of the study, but in relation with the recognition of the daily living activities, the discovery of the behavioral patterns and the decision support.
2.3. Social Robots Driven Intervention
2.4. Technology Limitation and User Acceptance
3. Novel Integrated Robot-Based Care Services
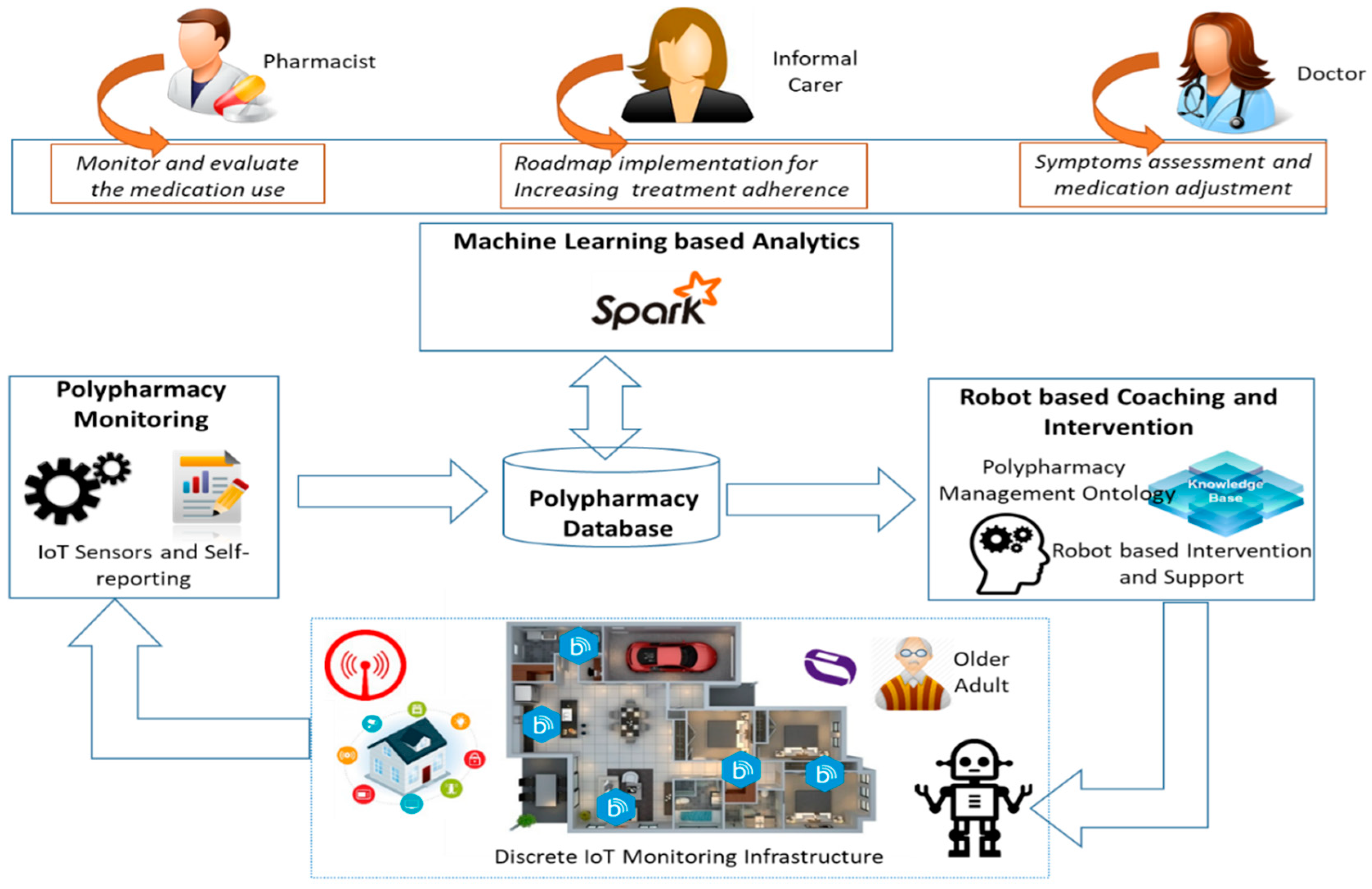
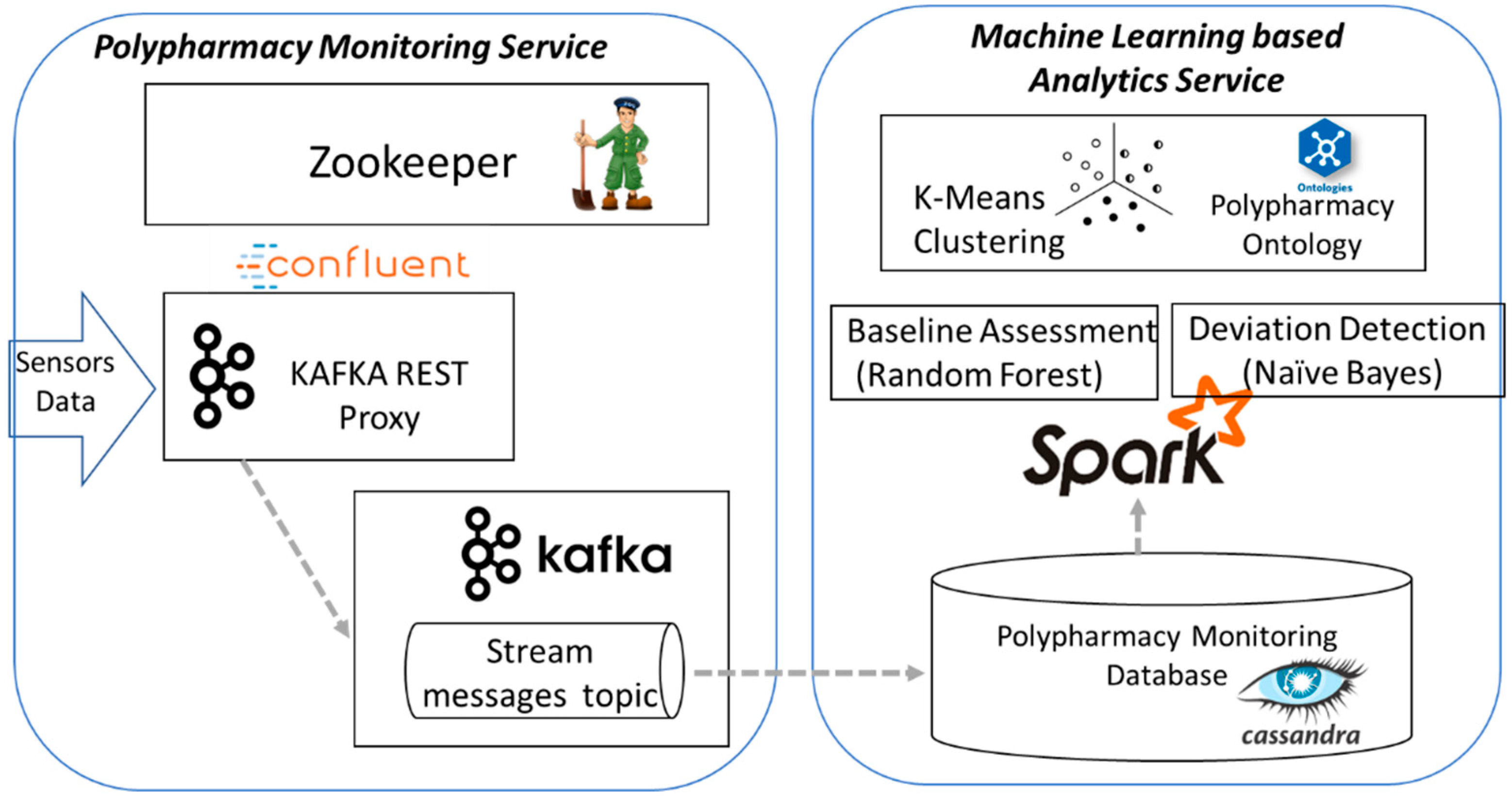
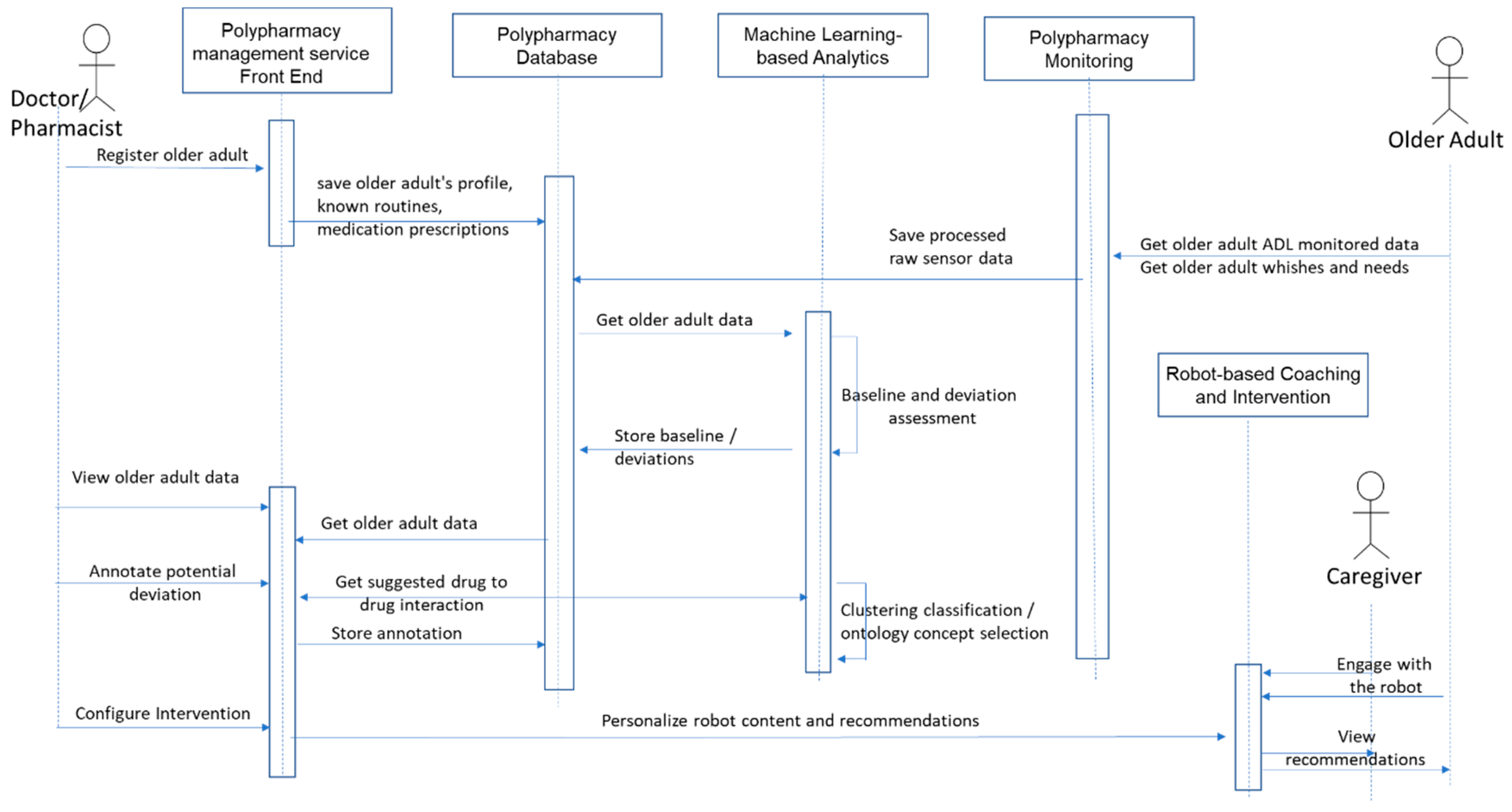
3.1. Polypharmacy Management
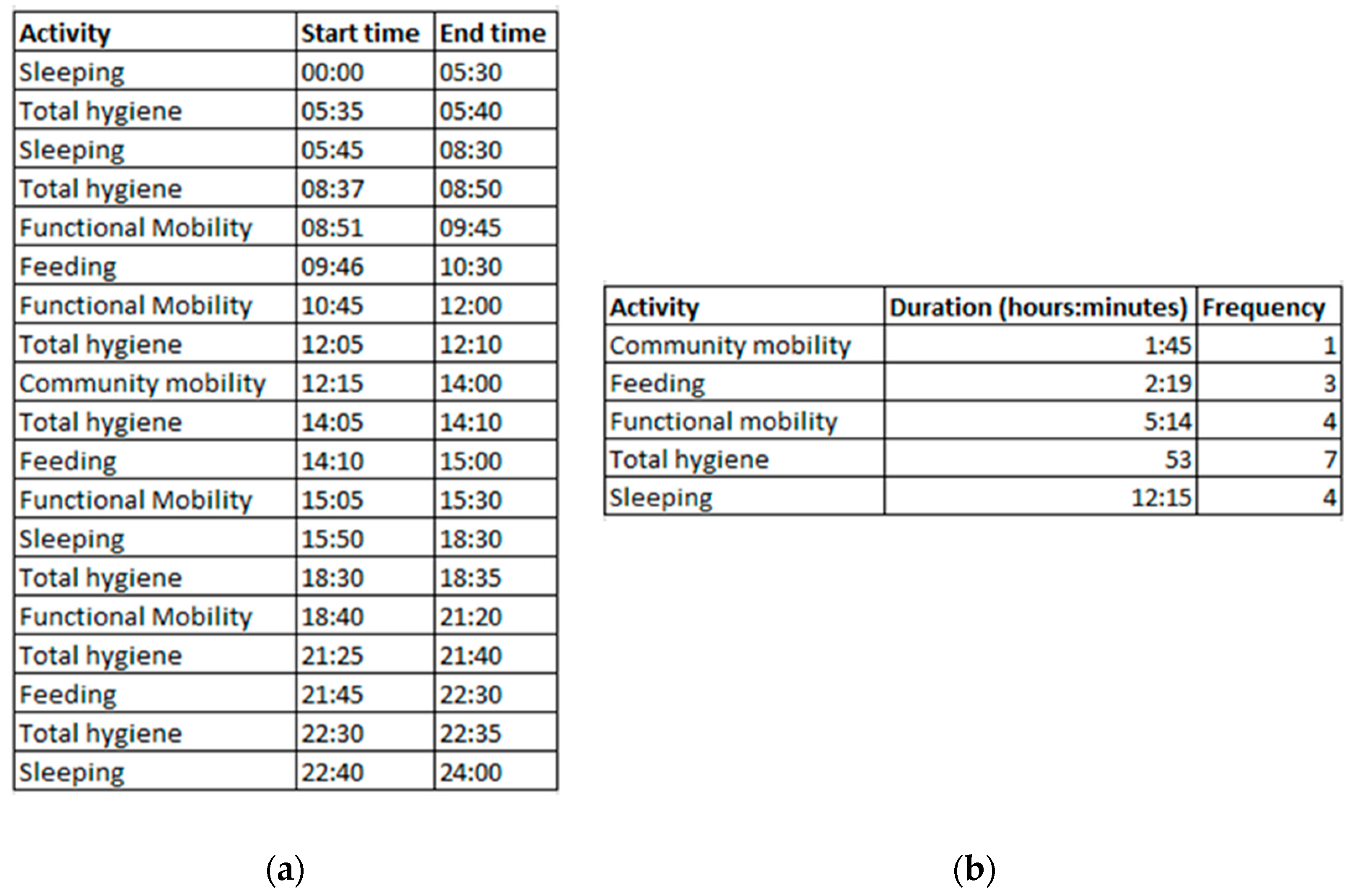
- Community mobility—refers to outdoor activities;
- Feeding—refers to the activities of preparing and eating food;
- Functional mobility—refers to indoor activities;
- Total hygiene—refers to the toilet visits and showering activities;
- Sleeping—refers to overnight sleeping and afternoon naps
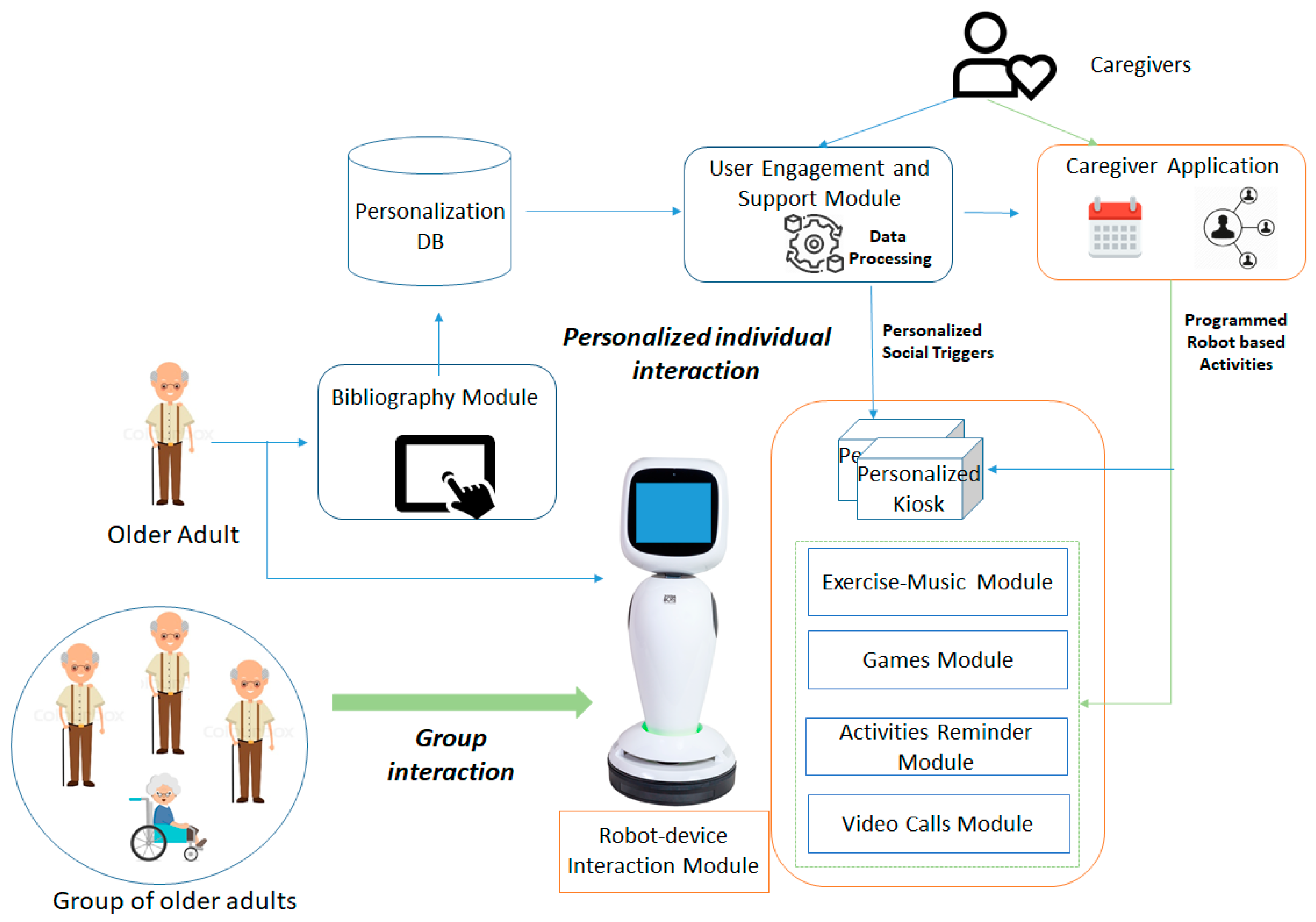
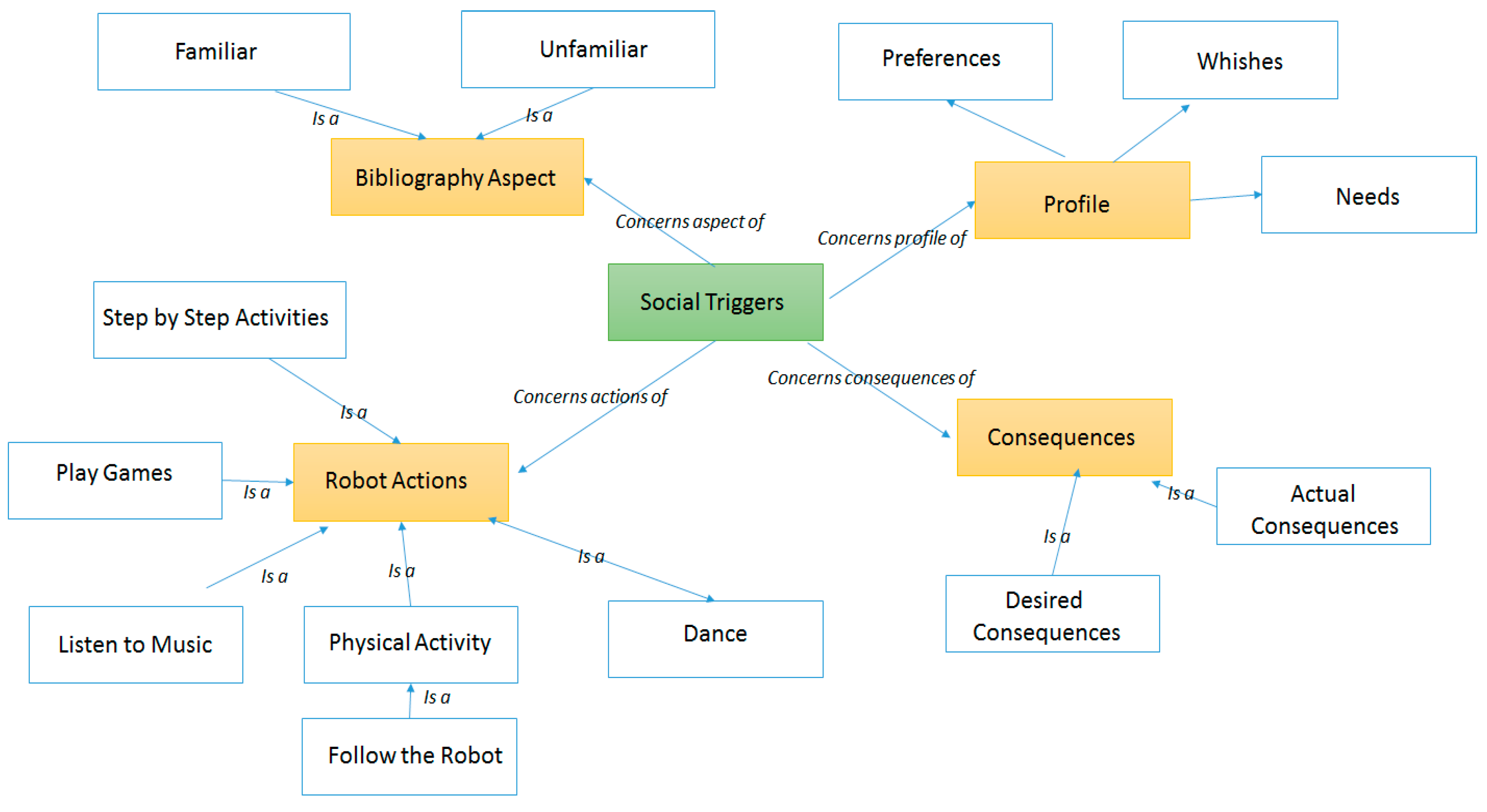
3.2. Social and Cognitive Activity Engagement
- Bibliography aspects—which may be familiar or unfamiliar and it is collected using the bibliography module;
- Personal profile aspects—which concern his/her preferences wishes and needs being also provided by the bibliography module;
- Robot-based Actions—potential actions in which the older adult may be engaged with the robot;
- Consequences—the actual and desired result of conducting a specific activity with the robot;
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Age-Friendly Cities and Communities. Available online: https://www.who.int/ageing/projects/age-friendly-cities-communities/en/ (accessed on 1 April 2020).
- Global Network for Age-friendly Cities and Communities. Available online: https://www.who.int/ageing/projects/age_friendly_cities_network/en/ (accessed on 1 April 2020).
- Plouffe, L.; Kalache, A. Towards Global Age-Friendly Cities: Determining Urban Features that Promote Active Aging. J. Hered. 2010, 87, 733–739. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Global Age-friendly Cities: A Guide. Available online: https://www.who.int/ageing/publications/Global_age_friendly_cities_Guide_English.pdf (accessed on 23 April 2020).
- Marston, H.R.; van Hoof, J. “Who Doesn’t Think about Technology When Designing Urban Environments for Older People?”. A Case Study Approach to a Proposed Extension of the WHO’s Age-Friendly Cities Model. Int. J. Environ. Res. Public Health 2019, 16, 3525. [Google Scholar]
- Stefanov, D.H.; Bien, Z.; Bang, W.C. The Smart House for Older Persons and Persons With Physical Disabilities: Structure, Technology Arrangements, and Perspectives. IEEE Trans. Neural Syst. Rehabil. Eng. 2004, 12, 228–250. [Google Scholar] [CrossRef] [PubMed]
- Age Friendly Model, Housing. Available online: https://extranet.who.int/agefriendlyworld/age-friendly-practices/housing/ (accessed on 22 May 2020).
- Marston, H.R.; Samuels, J. A Review of Age Friendly Virtual Assistive Technologies and their Effect on Daily Living for Carers and Dependent Adults. Health 2019, 7, 49. [Google Scholar] [CrossRef]
- Breazeal, C.L.; Ostrowski, A.K.; Singh, N.; Park, H.W. Designing social robots for older adults. Natl. Acad. Eng. Bridge 2019, 49, 22–31. [Google Scholar]
- Suzman, R.; Beard, J.; Boerma, T.; Chatterji, S. Health in an ageing world—what do we know? Lancet 2015, 385, 484–486. [Google Scholar] [CrossRef]
- Almeida, A.; Mulero, R.; Rametta, P.; Urošević, V.; Andrić, M.; Patrono, L. A critical analysis of an IoT—aware AAL system for elderly monitoring. Futur. Gener. Comput. Syst. 2019, 97, 598–619. [Google Scholar] [CrossRef]
- Alkhomsan, M.N.; Hossain, M.A.; Rahman, S.M.M.; Masud, M. Situation Awareness in Ambient Assisted Living for Smart Healthcare. IEEE Access 2017, 5, 20716–20725. [Google Scholar] [CrossRef]
- Forkan, A.R.M.; Khalil, I.; Tari, Z. CoCaMAAL: A cloud-oriented context-aware middleware in ambient assisted living. Futur. Gener. Comput. Syst. 2014, 35, 114–127. [Google Scholar] [CrossRef]
- Ghayvat, H.; Awais, M.; Pandya, S.; Ren, H.; Akbarzadeh, S.; Mukhopadhyay, S.; Chen, C.; Gope, P.; Chouhan, A.; Chen, W. Smart Aging System: Uncovering the Hidden Wellness Parameter for Well-Being Monitoring and Anomaly Detection. Sensors 2019, 19, 766. [Google Scholar] [CrossRef]
- Miramontes, R.; Aquino-Santos, R.; Flores, A.; Rodríguez, G.; Anguiano, R.; Ríos, A.; Edwards, A. PlaIMoS: A Remote Mobile Healthcare Platform to Monitor Cardiovascular and Respiratory Variables. Sensors 2017, 17, 176. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Hu, X.; Zhang, L. The IoT-based heart disease monitoring system for pervasive healthcare service. Procedia Comput. Sci. 2017, 112, 2328–2334. [Google Scholar] [CrossRef]
- Villegas, A.; McEneaney, D.; Escalona, O. Arm-ECG Wireless Sensor System for Wearable Long-Term Surveillance of Heart Arrhythmias. Electronics 2019, 8, 1300. [Google Scholar] [CrossRef]
- Boehm, A.; Yu, X.; Neu, W.; Leonhardt, S.; Teichmann, D. A Novel 12-Lead ECG T-Shirt with Active Electrodes. Electronics 2016, 5, 75. [Google Scholar] [CrossRef]
- Kakria, P.; Tripathi, N.K.; Kitipawang, P. A Real-Time Health Monitoring System for Remote Cardiac Patients Using Smartphone and Wearable Sensors. Int. J. Telemed. Appl. 2015, 2015, 1–11. [Google Scholar] [CrossRef]
- Razjouyan, J.; Lee, H.; Parthasarathy, S.; Mohler, J.; Sharafkhaneh, A.; Najafi, B. Improving Sleep Quality Assessment Using Wearable Sensors by Including Information From Postural/Sleep Position Changes and Body Acceleration: A Comparison of Chest-Worn Sensors, Wrist Actigraphy, and Polysomnography. J. Clin. Sleep Med. 2017, 13, 1301–1310. [Google Scholar] [CrossRef]
- Gruwez, A.; Libert, W.; Ameye, L.; Bruyneel, M. Reliability of commercially available sleep and activity trackers with manual switch-to-sleep mode activation in free-living healthy individuals. Int. J. Med. Inform. 2017, 102, 87–92. [Google Scholar] [CrossRef]
- Mantua, J.; Gravel, N.; Spencer, R. Reliability of Sleep Measures from Four Personal Health Monitoring Devices Compared to Research-Based Actigraphy and Polysomnography. Sensors 2016, 16, 646. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Hu, Z.; Quan, L.; Shi, L.; Chen, J.; Xuan, W.; Zhang, Z.; Dong, S.; Luo, J.; et al. Waist-wearable wireless respiration sensor based on triboelectric effect. Nano Energy 2019, 59, 75–83. [Google Scholar] [CrossRef]
- Seoane, F.; Mohino-Herranz, I.; Ferreira, J.; Alvarez, L.; Buendia, R.; Ayllon, D.; Llerena, C.; Gil-Pita, R. Wearable Biomedical Measurement Systems for Assessment of Mental Stress of Combatants in Real Time. Sensors 2014, 14, 7120–7141. [Google Scholar] [CrossRef]
- Shin, D.; Shin, D.; Shin, D. Ubiquitous Health Management System with Watch-Type Monitoring Device for Dementia Patients. J. Appl. Math. 2014, 2014, 878741. [Google Scholar] [CrossRef]
- Stubbs, B.; Chen, L.-J.; Chang, C.-Y.; Sun, W.-J.; Ku, P.-W. Accelerometer-assessed light physical activity is protective of future cognitive ability: A longitudinal study among community dwelling older adults. Exp. Gerontol. 2017, 91, 104–109. [Google Scholar] [CrossRef] [PubMed]
- Hua, A.; Quicksall, Z.; Di, C.; Motl, R.; Lacroix, A.Z.; Schatz, B.; Buchner, D.M. Accelerometer-based predictive models of fall risk in older women: A pilot study. NPJ Digit. Med. 2018, 1, 25. [Google Scholar] [CrossRef] [PubMed]
- Marston, H.R.; Hadley, R.; Banks, D.; Miranda-Duro, M.D.C. Mobile Self-Monitoring ECG Devices to Diagnose Arrhythmia that Coincide with Palpitations: A Scoping Review. Health 2019, 7, 96. [Google Scholar] [CrossRef] [PubMed]
- Tajitsu, Y. Piezoelectret sensor made from an electro-spun fluoropolymer and its use in a wristband for detecting heart-beat signals. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 1355–1359. [Google Scholar] [CrossRef]
- de Zambotti, M.; Goldstone, A.; Claudatos, S.; Colrain, I.M.; Baker, F.K. A validation study of Fitbit Charge 2™ compared with polysomnography in adults, Chronobiology International. J. Biol. Med. Rhythm Res. 2018, 35, 465–476. [Google Scholar]
- Kwasnicki, R.; Cross, G.W.V.; Geoghegan, L.; Zhang, Z.; Reilly, P.; Darzi, A.; Yang, G.-Z.; Emery, R. A lightweight sensing platform for monitoring sleep quality and posture: A simulated validation study. Eur. J. Med. Res. 2018, 23, 28. [Google Scholar] [CrossRef]
- Lyons, B.E.; Austin, D.; Seelye, A.; Petersen, J.; Yeargers, J.; Riley, T.; Sharma, N.; Mattek, N.; Dodge, H.; Wild, K.; et al. Corrigendum: Pervasive computing technologies to continuously assess Alzheimer’s disease progression and intervention efficacy. Front. Aging Neurosci. 2015, 7, 232. [Google Scholar] [CrossRef]
- Hsieh, C.-Y.; Liu, K.-C.; Huang, C.-N.; Chu, W.C.; Chan, C.-T. Novel Hierarchical Fall Detection Algorithm Using a Multiphase Fall Model. Sensors 2017, 17, 307. [Google Scholar] [CrossRef]
- Huynh, Q.T.; Nguyen, U.D.; Irazabal, L.B.; Ghassemian, N.; Tran, B.Q. Optimization of an Accelerometer and Gyroscope-Based Fall Detection Algorithm. J. Sensors 2015, 2015, 1–8. [Google Scholar] [CrossRef]
- Bagalà, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of Accelerometer-Based Fall Detection Algorithms on Real-World Falls. PLoS ONE 2012, 7, e37062. [Google Scholar] [CrossRef] [PubMed]
- Abbate, S.; Avvenuti, M.; Bonatesta, F.; Cola, G.; Corsini, P.; Vecchio, A. A smartphone-based fall detection system. Pervasive Mob. Comput. 2012, 8, 883–899. [Google Scholar] [CrossRef]
- Mao, A.; Ma, X.; He, Y.; Luo, J. Highly Portable, Sensor-Based System for Human Fall Monitoring. Sensors 2017, 17, 2096. [Google Scholar] [CrossRef] [PubMed]
- Susnea, I.; Dumitriu, L.; Talmaciu, M.; Pecheanu, E.; Munteanu, D. Unobtrusive Monitoring the Daily Activity Routine of Elderly People Living Alone, with Low-Cost Binary Sensors. Sensors 2019, 19, 2264. [Google Scholar] [CrossRef]
- Barsocchi, P.; Bianchini, M.; Crivello, A.; La Rosa, D.; Palumbo, F.; Scarselli, F. An unobtrusive sleep monitoring system for the human sleep behaviour understanding. In Proceedings of the 2016 7th IEEE International Conference on Cognitive Infocommunications (CogInfoCom), Wroclaw, Poland, 16–18 October 2016; Institute of Electrical and Electronics Engineers (IEEE): Los Alamitos, CA, USA, 2016; pp. 000091–000096. [Google Scholar]
- Sadek, I.; Bellmunt, J.; Kodyš, M.; Abdulrazak, B.; Mokhtari, M. Novel Unobtrusive Approach for Sleep Monitoring Using Fiber Optics in an Ambient Assisted Living Platform. In Computer Vision; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10461, pp. 48–60. [Google Scholar]
- Kortelainen, J.M.; Mendez, M.O.; Bianchi, A.M.; Matteucci, M.; Cerutti, S. Sleep Staging Based on Signals Acquired Through Bed Sensor. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 776–785. [Google Scholar] [CrossRef]
- Paalasmaa, J.; Waris, M.; Toivonen, H.; Leppäkorpi, L.; Partinen, M. Unobtrusive online monitoring of sleep at home. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; Volume 2012, pp. 3784–3788. [Google Scholar]
- Lee, J.; Hong, M.; Ryu, S. Sleep Monitoring System Using Kinect Sensor. Int. J. Distrib. Sens. Networks 2015, 2015, 1–9. [Google Scholar] [CrossRef]
- Wang, Y.-K.; Chen, H.-Y.; Chen, J.-R.; Chen, H.-Y. Unobtrusive Sleep Monitoring Using Movement Activity by Video Analysis. Electronics 2019, 8, 812. [Google Scholar] [CrossRef]
- De Miguel, K.; Brunete, A.; Hernando, M.; Gambao, E. Home Camera-Based Fall Detection System for the Elderly. Sensors 2017, 17, 2864. [Google Scholar] [CrossRef]
- Stone, E.E.; Skubic, M. Fall Detection in Homes of Older Adults Using the Microsoft Kinect. IEEE J. Biomed. Health Inform. 2015, 19, 290–301. [Google Scholar] [CrossRef]
- Daher, M.; Najjar, M.E.B.E.; Khalil, M. Automatic Fall Detection System using Sensing Floors. Int. J. Comput. Inf. Sci. 2016, 12, 75–82. [Google Scholar] [CrossRef]
- Droghini, D.; Principi, E.; Squartini, S.; Olivetti, P.; Piazza, F. Human Fall Detection by Using an Innovative Floor Acoustic Sensor. In Advances in Theory and Practice of Computational Mechanics; Springer: Berlin/Heidelberg, Germany, 2017; Volume 69, pp. 97–107. [Google Scholar]
- Khan, M.S.; Yu, M.; Feng, P.; Wang, L.; Chambers, J. An unsupervised acoustic fall detection system using source separation for sound interference suppression. Signal Process. 2015, 110, 199–210. [Google Scholar] [CrossRef]
- Li, Y.; Ho, K.C.; Popescu, M. A Microphone Array System for Automatic Fall Detection. IEEE Trans. Biomed. Eng. 2012, 59, 1291–1301. [Google Scholar] [CrossRef] [PubMed]
- Palumbo, F.; La Rosa, D.; Ferro, E. Stigmergy-based Long-Term Monitoring of Indoor Users Mobility in Ambient Assisted Living Environments: The DOREMI Project Approach. In Proceedings of the Artificial Intelligence for Ambient Assisted Living 2016 co-located with 15th International Conference of the Italian Association for Artificial Intelligence (AIxIA 2016), Genova, Italy, 28 November 2016; pp. 18–32. [Google Scholar]
- Kyriazakos, S.; Prasad, R.; Mihovska, A.; Pnevmatikakis, A.; Akker, H.O.D.; Hermens, H.; Barone, P.; Mamelli, A.; De Domenico, S.; Pocs, M.; et al. eWALL: An Open-Source Cloud-Based eHealth Platform for Creating Home Caring Environments for Older Adults Living with Chronic Diseases or Frailty. Wirel. Pers. Commun. 2017, 97, 1835–1875. [Google Scholar] [CrossRef]
- Nam, Y.; Kim, Y.; Lee, J. Sleep Monitoring Based on a Tri-Axial Accelerometer and a Pressure Sensor. Sensors 2016, 16, 750. [Google Scholar] [CrossRef]
- Pain-Care. Available online: http://myhealthapps.net/app/details/163/pain-care (accessed on 1 April 2020).
- Oh, S.J.; Seo, S.; Lee, J.H.; Song, M.J.; Shin, M.-S. Effects of smartphone-based memory training for older adults with subjective memory complaints: A randomized controlled trial. Aging Ment. Health 2017, 22, 526–534. [Google Scholar] [CrossRef]
- Hill, N.L.; Mogle, J.; Wion, R.; Kitt-Lewis, E.; Hannan, J.; Dick, R.; McDermott, C. App-based attention training: Incorporating older adults’ feedback to facilitate home-based use. Int. J. Older People Nurs. 2017, 13, e12163. [Google Scholar] [CrossRef]
- Shellington, E.M.; Felfeli, T.; Shigematsu, R.; Gill, D.P.; Petrella, R.J. HealtheBrain: An innovative smartphone application to improve cognitive function in older adults. mHealth 2017, 3, 17. [Google Scholar] [CrossRef]
- Lu, M.-H.; Lin, W.; Yueh, H.-P. Development and Evaluation of a Cognitive Training Game for Older People: A Design-based Approach. Front. Psychol. 2017, 8, 1837. [Google Scholar] [CrossRef]
- Areán, P.A.; Hallgren, K.A.; Jordan, J.T.; Gazzaley, A.; Atkins, D.C.; Heagerty, P.J.; Anguera, J.A.; Kauppi, K.; Schueller, S.; Ben-Zeev, O. The Use and Effectiveness of Mobile Apps for Depression: Results From a Fully Remote Clinical Trial. J. Med. Internet Res. 2016, 18, e330. [Google Scholar] [CrossRef]
- Kühn, S.; Berna, F.; Lüdtke, T.; Gallinat, J.; Moritz, S. Fighting Depression: Action Video Game Play May Reduce Rumination and Increase Subjective and Objective Cognition in Depressed Patients. Front. Psychol. 2018, 9. [Google Scholar] [CrossRef]
- Bilbao, A.; Almeida, A.; López-De-Ipiña, D. Promotion of active ageing combining sensor and social network data. J. Biomed. Inform. 2016, 64, 108–115. [Google Scholar] [CrossRef] [PubMed]
- Moldovan, D.; Anghel, I.; Cioara, T.; Salomie, I. Adapted Binary Particle Swarm Optimization for Efficient Features Selection in the Case of Imbalanced Sensor Data. Appl. Sci. 2020, 10, 1496. [Google Scholar] [CrossRef]
- Puschmann, D.; Barnaghi, P.; Tafazolli, R. Adaptive Clustering for Dynamic IoT Data Streams. IEEE Internet Things J. 2017, 4, 64–74. [Google Scholar] [CrossRef]
- Zliobaite, I.; Bifet, A.; Read, J.; Pfahringer, B.; Holmes, G. Evaluation methods and decision theory for classification of streaming data with temporal dependence. Mach. Learn. 2014, 98, 455–482. [Google Scholar] [CrossRef]
- Lin, C.-C.; Deng, D.-J.; Kuo, C.-H.; Chen, L. Concept Drift Detection and Adaption in Big Imbalance Industrial IoT Data Using an Ensemble Learning Method of Offline Classifiers. IEEE Access 2019, 7, 56198–56207. [Google Scholar] [CrossRef]
- Barddal, J.P.; Gomes, H.M.; Enembreck, F.; Pfahringer, B. A survey on feature drift adaptation: Definition, benchmark, challenges and future directions. J. Syst. Softw. 2017, 127, 278–294. [Google Scholar] [CrossRef]
- Wan, J.; Li, M.; O’Grady, M.; Gu, X.; AlAwlaqi, M.A.; O’Hare, G.M. Time-bounded Activity Recognition for Ambient Assisted Living. IEEE Trans. Emerg. Top. Comput. 2018, 1. [Google Scholar] [CrossRef]
- Dhiman, C.; Vishwakarma, D.K. A review of state-of-the-art technologies for abnormal human activity recognition. Eng. Appl. Artif. Intell. 2019, 77, 21–45. [Google Scholar] [CrossRef]
- Islam, S.M.R.; Kwak, D.; Kabir, H.; Hossain, M.; Kwak, K.-S. The Internet of Things for Health Care: A Comprehensive Survey. IEEE Access 2015, 3, 678–708. [Google Scholar] [CrossRef]
- Botía, J.A.; Villa, A.; Palma, J. Ambient Assisted Living system for in-home monitoring of healthy independent elders. Expert Syst. Appl. 2012, 39, 8136–8148. [Google Scholar] [CrossRef]
- Ni, Q.; Hernando, A.B.G.; De La Cruz, I.P. The Elderly’s Independent Living in Smart Homes: A Characterization of Activities and Sensing Infrastructure Survey to Facilitate Services Development. Sensors 2015, 15, 11312–11362. [Google Scholar] [CrossRef]
- Debes, C.; Merentitis, A.; Sukhanov, S.; Niessen, M.; Frangiadakis, N.; Bauer, A. Monitoring Activities of Daily Living in Smart Homes: Understanding human behavior. IEEE Signal Process. Mag. 2016, 33, 81–94. [Google Scholar] [CrossRef]
- Navarro, J.; Vila, E.V.; Alsina-Pagès, R.M.; Hervás, M. Real-Time Distributed Architecture for Remote Acoustic Elderly Monitoring in Residential-Scale Ambient Assisted Living Scenarios. Sensors 2018, 18, 2492. [Google Scholar] [CrossRef] [PubMed]
- Vanus, J.; Belesova, J.; Martinek, R.; Nedoma, J.; Fajkus, M.; Bilik, P.; Zidek, J. Monitoring of the daily living activities in smart home care. Human-Centric Comput. Inf. Sci. 2017, 7, 1–34. [Google Scholar] [CrossRef]
- Pires, I.M.; Marques, G.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S.; Teixeira, M.C.; Zdravevski, E. Recognition of Activities of Daily Living and Environments Using Acoustic Sensors Embedded on Mobile Devices. Electronics 2019, 8, 1499. [Google Scholar] [CrossRef]
- Gochoo, M.; Tan, T.-H.; Liu, S.-H.; Jean, F.-R.; Alnajjar, F.S.; Huang, S.-C. Unobtrusive Activity Recognition of Elderly People Living Alone Using Anonymous Binary Sensors and DCNN. IEEE J. Biomed. Health Inform. 2018, 23, 1. [Google Scholar] [CrossRef]
- Liciotti, D.; Bernardini, M.; Romeo, L.; Frontoni, E. A sequential deep learning application for recognising human activities in smart homes. Neurocomputing 2020, 396, 501–513. [Google Scholar] [CrossRef]
- Sarabia-Jácome, D.; Usach, R.; Palau, C.; Esteve, M. Highly-Efficient Fog-Based Deep Learning Aal Fall Detection System. Internet Things 2020, 100185. [Google Scholar] [CrossRef]
- Khan, S.; Ye, B.; Taati, B.; Mihailidis, A. Detecting agitation and aggression in people with dementia using sensors-A systematic review. Alzheimer’s Dement. 2018, 14, 824–832. [Google Scholar] [CrossRef]
- Sakr, G.; Elhajj, I.H.; Huijer, H.A.-S. Support Vector Machines to Define and Detect Agitation Transition. IEEE Trans. Affect. Comput. 2010, 1, 98–108. [Google Scholar] [CrossRef]
- Lopez-De-Ipina, K.; Hernández, J.B.A.; Travieso-González, C.M.; Solé-Casals, J.; Eguiraun, H.; Faundez-Zanuy, M.; Ezeiza, A.; Barroso, N.; Ecay-Torres, M.; Martinez-Lage, P.; et al. On the Selection of Non-Invasive Methods Based on Speech Analysis Oriented to Automatic Alzheimer Disease Diagnosis. Sensors 2013, 13, 6730–6745. [Google Scholar] [CrossRef] [PubMed]
- Alam, R.; Bankole, A.; Anderson, M.; Lach, J. Multiple-Instance Learning for Sparse Behavior Modeling from Wearables: Toward Dementia-Related Agitation Prediction. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; Volume 2019, pp. 1330–1333. [Google Scholar]
- Goerss, D.; Hein, A.; Bader, S.; Halek, M.; Kernebeck, S.; Kutschke, A.; Heine, C.; Krueger, F.; Kirste, T.; Teipel, S. Automated sensor-based detection of challenging behaviors in advanced stages of dementia in nursing homes. Alzheimer’s Dement. 2019, 1–9. [Google Scholar] [CrossRef]
- Khan, S.S.; Spasojevic, S.; Nogas, J.; Ye, B.; Mihailidis, A.; Iaboni, A.; Wang, A.; Martin, L.S.; Newman, K. Agitation Detection in People Living with Dementia using Multimodal Sensors. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; Volume 2019, pp. 3588–3591. [Google Scholar]
- Wherton, J.P.; Monk, A.F. Technological opportunities for supporting people with dementia who are living at home. Int. J. Hum. Comput. Stud. 2008, 66, 571–586. [Google Scholar] [CrossRef]
- Tang, L.; Zhou, X.; Yu, Z.; Liang, Y.; Zhang, D.; Ni, H. MHS: A Multimedia System for Improving Medication Adherence in Elderly Care. IEEE Syst. J. 2011, 5, 506–517. [Google Scholar] [CrossRef]
- Das, B.; Cook, D.J.; Krishnan, N.C.; Schmitter-Edgecombe, M. One-Class Classification-Based Real-Time Activity Error Detection in Smart Homes. IEEE J. Sel. Top. Signal Process. 2016, 10, 914–923. [Google Scholar] [CrossRef] [PubMed]
- Austin, J.; Klein, K.; Mattek, N.; Kaye, J. Variability in medication taking is associated with cognitive performance in nondemented older adults. Alzheimer’s Dement. Diagn. Assess. Dis. Monit. 2017, 6, 210–213. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Ovalle, A.; Woodbridge, D.M.-K. Medhere: A Smartwatch-based Medication Adherence Monitoring System using Machine Learning and Distributed Computing. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 17–21 July 2018; pp. 4945–4948. [Google Scholar]
- Gomes, D.; Mendes-Moreira, J.; Sousa, I.; Silva, J.R. Eating and Drinking Recognition in Free-Living Conditions for Triggering Smart Reminders. Sensors 2019, 19, 2803. [Google Scholar] [CrossRef] [PubMed]
- Fozoonmayeh, D.; Le, H.V.; Wittfoth, E.; Geng, C.; Ha, N.; Wang, J.; Vasilenko, M.; Ahn, Y.; Woodbridge, D.M.-K. A Scalable Smartwatch-Based Medication Intake Detection System Using Distributed Machine Learning. J. Med. Syst. 2020, 44, 1–14. [Google Scholar] [CrossRef]
- Hezarjaribi, N.; Fallahzadeh, R.; Ghasemzadeh, H. A Machine Learning Approach for Medication Adherence Monitoring Using Body-Worn Sensors. In Proceedings of the 2016 Design, Automation & Test in Europe Conference & Exhibition (DATE); Research Publishing Services, Dresden, Germany, 14–18 March 2016; pp. 842–845. [Google Scholar]
- Broekens, J.; Heerink, M.; Rosendal, H. Assistive social robots in elderly care: A review. Gerontechnology 2009, 8, 94–103. [Google Scholar] [CrossRef]
- Hung, L.; Liu, C.; Woldum, E.; Au-Yeung, A.; Berndt, A.; Wallsworth, C.; Horne, N.; Gregorio, M.; Mann, J.; Chaudhury, H. The benefits of and barriers to using a social robot PARO in care settings: A scoping review. BMC Geriatr. 2019, 19, 232. [Google Scholar] [CrossRef]
- Kachouie, R.; Sedighadeli, S.; Khosla, R.; Chu, M.-T. Socially Assistive Robots in Elderly Care: A Mixed-Method Systematic Literature Review. Int. J. Hum. Comp. Interact. 2014, 30, 369–393. [Google Scholar] [CrossRef]
- Kang, H.S.; Makimoto, K.; Konno, R.; Koh, I.S. Review of outcome measures in PARO robot intervention studies for dementia care. Geriatr. Nurs. 2019. [Google Scholar] [CrossRef] [PubMed]
- Pandey, A.K.; Gelin, R. A Mass-Produced Sociable Humanoid Robot: Pepper: The First Machine of Its Kind. IEEE Robot. Autom. Mag. 2018, 25, 40–48. [Google Scholar] [CrossRef]
- Dominey, P.F.; Paléologue, V.; Pandey, A.K.; Ventre-Dominey, J. Improving quality of life with a narrative companion. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August 2017; pp. 127–134. [Google Scholar]
- Culture Aware Robots and Environmental Sensor Systems for Elderly Support. Available online: http://caressesrobot.org/en/ (accessed on 1 April 2020).
- Costa, A.; Martinez-Martin, E.; Cazorla, M.; Julian, V. PHAROS—PHysical Assistant RObot System. Sensors 2018, 18, 2633. [Google Scholar] [CrossRef] [PubMed]
- Abbas, T.; Khan, V.-J.; Gadiraju, U.; Barakova, E.; Markopoulos, P. Crowd of Oz: A Crowd-Powered Social Robotics System for Stress Management. Sensors 2020, 20, 569. [Google Scholar] [CrossRef] [PubMed]
- Sato, M.; Yasuhara, Y.; Osaka, K.; Ito, H.; Dino, M.J.S.; Ong, I.L.; Zhao, Y.; Tanioka, T. Rehabilitation care with Pepper humanoid robot: A qualitative case study of older patients with schizophrenia and/or dementia in Japan. Enfermería Clín. 2020, 30, 32–36. [Google Scholar] [CrossRef]
- Rozanska, A.; Podpora, M. Multimodal sentiment analysis applied to interaction between patients and a humanoid robot Pepper. IFAC-PapersOnLine 2019, 52, 411–414. [Google Scholar] [CrossRef]
- Görer, B.; Salah, A.A.; Akın, H.L. An autonomous robotic exercise tutor for elderly people. Auton. Robot. 2016, 41, 657–678. [Google Scholar] [CrossRef]
- Torta, E.; Werner, F.; Johnson, D.O.; Juola, J.F.; Cuijpers, R.H.; Bazzani, M.; Oberzaucher, J.; Lemberger, J.; Lewy, H.; Bregman, J. Evaluation of a Small Socially-Assistive Humanoid Robot in Intelligent Homes for the Care of the Elderly. J. Intell. Robot. Syst. 2014, 76, 57–71. [Google Scholar] [CrossRef]
- Nauta, J.; Mahieu, C.; Michiels, C.; Ongenae, F.; De Backere, F.; De Turck, F.; Khaluf, Y.; Simoens, P. Pro-active positioning of a social robot intervening upon behavioral disturbances of persons with dementia in a smart nursing home. Cogn. Syst. Res. 2019, 57, 160–174. [Google Scholar] [CrossRef]
- Melkas, H.; Hennala, L.; Pekkarinen, S.; Kyrki, V. Impacts of robot implementation on care personnel and clients in elderly-care institutions. Int. J. Med. Inform. 2020, 134, 104041. [Google Scholar] [CrossRef]
- Gomez, M.M.; Castro-González, Á.; Castillo, J.C.; Malfaz, M.; Salichs, M.A. A Bio-inspired Motivational Decision Making System for Social Robots Based on the Perception of the User. Sensors 2018, 18, 2691. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Louie, W.-Y.; Nejat, G.; Benhabib, B. Robot Imitation Learning of Social Gestures with Self-Collision Avoidance Using a 3D Sensor. Sensors 2018, 18, 2355. [Google Scholar] [CrossRef] [PubMed]
- McGinn, C.; Bourke, E.; Murtagh, A.; Donovan, C.; Lynch, P.; Cullinan, M.F.; Kelly, K. Meet Stevie: A Socially Assistive Robot Developed Through Application of a ‘Design-Thinking’ Approach. J. Intell. Robot. Syst. 2019, 98, 39–58. [Google Scholar] [CrossRef]
- Yun, S.-S.; Kim, H.; Choi, J.; Park, S.-K. A robot-assisted behavioral intervention system for children with autism spectrum disorders. Robot. Auton. Syst. 2016, 76, 58–67. [Google Scholar] [CrossRef]
- Peek, S.T.M.; Wouters, E.J.; Van Hoof, J.; Luijkx, K.G.; Boeije, H.R.; Vrijhoef, H.J. Factors influencing acceptance of technology for aging in place: A systematic review. Int. J. Med. Inform. 2014, 83, 235–248. [Google Scholar] [CrossRef] [PubMed]
- Klímová, B.; Poulová, P. Older People and Technology Acceptance. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2018; Volume 10926, pp. 85–94. [Google Scholar]
- Chen, K.; Chan, A. A review of technology acceptance by older adults. Gerontechnology 2011, 10, 1–12. [Google Scholar] [CrossRef]
- Yusif, S.; Soar, J.; Hafeez-Baig, A. Older people, assistive technologies, and the barriers to adoption: A systematic review. Int. J. Med. Inform. 2016, 94, 112–116. [Google Scholar] [CrossRef]
- Giger, J.T.; Pope, N.D.; Vogt, H.B.; Gutierrez, C.; Newland, L.A.; Lemke, J.; Lawler, M.J. Remote patient monitoring acceptance trends among older adults residing in a frontier state. Comput. Hum. Behav. 2015, 44, 174–182. [Google Scholar] [CrossRef]
- Li, J.; Ma, Q.; Chan, A.H.S.; Man, S. Health monitoring through wearable technologies for older adults: Smart wearables acceptance model. Appl. Ergon. 2019, 75, 162–169. [Google Scholar] [CrossRef]
- Matthews, J.T.; Lingler, J.H.; Campbell, G.B.; Hunsaker, A.; Hu, L.; Pires, B.R.; Hebert, M.; Schulz, R. Usability of a Wearable Camera System for Dementia Family Caregivers. J. Health Eng. 2015, 6, 213–238. [Google Scholar] [CrossRef] [PubMed]
- Mann, W.C.; Marchant, T.; Tomita, M.; Fraas, L.; Stanton, K. Elder acceptance of health monitoring devices in the home. Care Manag. J. 2002, 3, 91–98. [Google Scholar] [CrossRef]
- Modoni, G.E.; Veniero, M.; Trombetta, A.; Sacco, M.; Clemente, S. Semantic based events signaling for AAL systems. J. Ambient. Intell. Humaniz. Comput. 2017, 9, 1311–1325. [Google Scholar] [CrossRef]
- Cioara, T.; Anghel, I.; Salomie, I.; Dinsoreanu, M. A Policy-Based Context Aware Self-Management Model. In Proceedings of the 2009 11th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing, Timisoara, Romania, 26–29 September 2009; pp. 333–340. [Google Scholar]
- Chifu, V.R.; Pop, C.; Cioara, T.; Anghel, I.; Moldovan, D.; Salomie, I. Identifying the Polypharmacy Side-Effects in Daily Life Activities of Elders with Dementia. In Intelligent Distributed Computing XII. IDC 2018. Studies in Computational Intelligence; Del Ser, J., Osaba, E., Bilbao, M., Sanchez-Medina, J., Vecchio, M., Yang, X.S., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; Volume 798, pp. 380–389. [Google Scholar]
- Singh, D.; Kropf, J.; Hanke, S.; Holzinger, A. Ambient Assisted Living Technologies from the Perspectives of Older People and Professionals. In Applications of Evolutionary Computation; Springer Science and Business Media LLC: Berlin, Germany, 2017; Volume 10410, pp. 255–266. [Google Scholar]
- Sapci, A.H.; Sapci, H.A.; Yang, R.; Du, Y. Innovative Assisted Living Tools, Remote Monitoring Technologies, Artificial Intelligence-Driven Solutions, and Robotic Systems for Aging Societies: Systematic Review. JMIR Aging 2019, 2, e15429. [Google Scholar] [CrossRef]
- Jarvis, M.-A.; Sartorius, B.; Chipps, J. Technology acceptance of older persons living in residential care. Inf. Dev. 2019. [Google Scholar] [CrossRef]
- Bharatharaj, J.; Krägeloh, C.; Kutty, S.K.S.; Nirmala, P.R.; Huang, L. Questionnaires to Measure Acceptability of Social Robots: A Critical Review. Robotics 2019, 8, 88. [Google Scholar] [CrossRef]
- Casas, J.; Gómez, N.C.; Cifuentes, C.A.; Gutierrez, L.; Rincon, M.; Múnera, M. Expectation vs. Reality: Attitudes Towards a Socially Assistive Robot in Cardiac Rehabilitation. Appl. Sci. 2019, 9, 4651. [Google Scholar] [CrossRef]
- Hameed, I.; Tan, Z.-H.; Thomsen, N.; Duan, X. User Acceptance of Social Robots. In Proceedings of the Ninth International Conference on Advances in Computer-Human Interactions (ACHI 2016), Venice, Italy, 24–28 April 2016; pp. 274–279. [Google Scholar]
- De Graaf, M.M.; Ben Allouch, S. Exploring influencing variables for the acceptance of social robots. Robot. Auton. Syst. 2013, 61, 1476–1486. [Google Scholar] [CrossRef]
- Heerink, M.; Krose, B.; Evers, V.; Wielinga, B. The influence of social presence on acceptance of a companion robot by older people. J. Phys. Agents (JoPha) 2008, 2, 33–40. [Google Scholar] [CrossRef]
- MedGUIDE AAL Project. Available online: http://medguide-aal.eu/ (accessed on 1 April 2020).
- Peek, S.T.M.; Kazak, J.K.; Perek-Białas, J.M.; Peek, S.T.M. The Challenges of Urban Ageing: Making Cities Age-Friendly in Europe. Int. J. Environ. Res. Public Health 2018, 15, 2473. [Google Scholar] [CrossRef]
- Apache Zookeeper. Available online: https://zookeeper.apache.org/ (accessed on 10 April 2020).
- Apache Kafka. Available online: https://kafka.apache.org/ (accessed on 10 April 2020).
- Apache Cassandra. Available online: http://cassandra.apache.org/ (accessed on 10 April 2020).
- Moldovan, D.; Visovan, A.; Bologa, M.; Pop, C.; Chifu, V.R.; Anghel, I.; Cioara, T.; Salomie, I. Random Forest and Sequential Model for Anomalies Detection in the Activities of the People with Dementia. In Proceedings of the World Congress on Medical Physics and Biomedical Engineering 2008, Cluj-Napoca, Romania, 17–20 October 2018; Volume 71, pp. 207–213. [Google Scholar]
- DINTO Ontology. Available online: https://bioportal.bioontology.org/ontologies/DINTO (accessed on 1 April 2020).
- James Social Robot Helps Children with Diabetes. Available online: https://robots.nu/en/newsitem/social-robot-helps-children-with-diabetes (accessed on 1 April 2020).
- AV1 Robot. Available online: https://www.noisolation.com/uk/av1/ (accessed on 1 April 2020).
- Martinez-Martin, E.; Escalona, F.; Cazorla, M. Socially Assistive Robots for Older Adults and People with Autism: An Overview. Electronics 2020, 9, 367. [Google Scholar] [CrossRef]
- ReMind AAL Project. Available online: https://www.aalremind.eu/ (accessed on 1 April 2020).
- Pop, C.; Moldovan, D.; Antal, M.; Valea, D.; Cioara, T.; Anghel, I.; Salomie, I. M2O: A library for using ontologies in software engineering. In Proceedings of the 2015 IEEE International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 3–5 September 2015; pp. 69–75. [Google Scholar]
- Keosity Platform. Available online: https://www.keosity.com/ (accessed on 1 April 2020).
- Jena. Available online: https://jena.apache.org/documentation/ontology/ (accessed on 1 April 2020).
- OWL API. Available online: http://owlcs.github.io/owlapi/ (accessed on 1 April 2020).
- Pellet Reasoner. Available online: https://github.com/stardog-union/pellet (accessed on 1 April 2020).
- D2RQ. Available online: http://d2rq.org/ (accessed on 1 April 2020).
- Horrocks, I.; Patel-Schneider, P.F.; Boley, H.; Tabet, S.; Grosof, B.; Dean, M. SWRL: A Semantic Web Rule Language Combing OWL and RuleML. World Wide Web. 2004. Available online: http://www.w3.org/Submission/SWRL/ (accessed on 19 October 2012).
- SQWRL: A Query Language for OWL. Available online: https://github.com/protegeproject/swrlapi/wiki/SQWRL (accessed on 1 April 2020).
- Zora Robot Interaction API. Available online: https://docs.zoracloud.com/mqtt-api/ (accessed on 1 April 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Available AAL Sensors | Type of Monitored Data | Approaches |
|---|---|---|
| Wearable sensors | ||
| Body temperature sensors, biosensors for monitoring vital signs | Body temperature, physiological attributes (e.g., heart rate, temperature, blood pressure, respiration rate, etc.) | [15,16,17,18,19,24,29] |
| Motion sensors such as accelerometers, gyroscope, magnetometers, passive infrared sensors, GPS, GSM, active badge systems | Movement, indoor/outdoor location, position, posture and gait | [15,16,21,22,25,26,27,30,32,33,34,35,36,37] |
| Photosensors, color sensors, acoustic sensors (i.e., microphones), etc. | Light levels, sound and audio | [22,24,25,26,30] |
| Body sleep sensors | Sleep levels, patterns, intensity, etc. | [20,22,23,30,31] |
| Non-Wearable sensors | ||
| Touch sensors | Touch (allow interaction with smartphones and tablets or home appliances) | [54,55,56,57,58,59,60] |
| Force/floor sensors | Falls and movement (walking, standing, sitting, etc.) | [14,45,47,48,49,50] |
| Pressure pad sensors | Surface pressure measurement (e.g., bed pressure mats) | [39,40,41,42,53] |
| Video sensors (e.g., various cameras) | Visual context (e.g., keep track of daily living activities performed by the older adult, locating the older adults in house) | [43,44,45,46] |
| Acoustic sensors | Fall-detection | [48,49,50] |
| Ambient sensors (temperature, appliances, toilet) | Ambient temperature, usage time duration of an equipment, Toilet-usage frequency | [14,38,51,52] |
| Contact sensors, magnetic switch | Open/close the office desk, open/close the TV, open doors, windows, etc. | [14,38,52] |
| Type of Assessment | Sensors | Potential Usage | |
|---|---|---|---|
| Physiological | Stress/anxiety level | Wearable sensors for pulse rate, temperature, blood pressure | Stress or anxiety detection -> Play music as intervention |
| Daily life activities assessment | Sleeping | Bed Pressure Sensors | Sleeping problems detection |
| General Activity level | Motion Sensors | Lack of physical activity -> individual training intervention | |
| Food intake | Devices embedded sensors | Intake problem -> intervention by reminding to eat, drink water, etc. | |
| Medication Intake | IoT Pillbox | Medication plan adherence problem -> intervention by reminding to take medication according to the prescription plan | |
| Social Interaction | Physical interaction | Camera and image processing and Voice recognition | Video-based communication to support mediated connection |
| Virtual interaction | Social network-based monitoring | ||
| Cognitive | Automatic Reminders | Voice recognition | Memory stimulation using biography |
| Personalized Information | News/weather feed | ||
| Safety | Safety Assistance | Fall detection sensors | Send of alerts/notifications |
| Social Robot | Approach | Conditions | older Adult Interventions |
|---|---|---|---|
| Nao | [104,105,106] | cognitively healthy older adults; persons with dementia/Alzheimer’s | detection of behavioral disturbances; physical exercises tutoring, recreational activities; physical training |
| Pepper | [99,100,101,102,103] | cognitively healthy older adults; crowd workers; people with schizophrenia or dementia | detection and classification of physical exercises; stress management, companion for older adults; rehabilitation recreational activities; sentiment analysis; narrative-memory-based human–robot companion; medicine taking reminding, encouraging older adults to keep active and social stimulation |
| PARO | [94,95,96] | older adults with dementia | pet therapy; reduce patient stress; social interaction, reducing depression and anxiety |
| Stevie | [110] | care house residents and caregivers | care support, entertainment, cognitive engagement, social connectivity |
| iRobiQ & CARO | [111] | children that have autism disorders | social training, emotions analysis |
| Zora | [107] | older adults with memory disorders | stimulating older adults through exercises and interaction |
| mini & Tangy | [108,109] | cognitively healthy older adults | educational games; imitation learning |
| Sensor Names | Installation Place | Monitoring of | Daily life Activity |
|---|---|---|---|
| Bed sensor | Bedroom | Sleeping pattern of an older adult in terms of period and continuity | Sleeping |
| Fridge sensor | Kitchen | The number of times the fridge has been opened by the older adult | Feeding |
| Motion sensor | Kitchen | The older adult’s activity in the kitchen | Feeding |
| Entrance sensor | Entrance | The number of times the entrance door has been opened or closed | Community mobility |
| Motion sensor | Entrance | Whether the older adult has left or entered the home | Community mobility |
| Motion sensor | Living room | How much physical activity is performed in the house | Functional mobility |
| Motion sensor | Bathroom | The number of times the older adult has been to the toilet | Hygiene |
| Type | Social Trigger Assessment Rule |
|---|---|
| SWRL rule | Patient(?p) ^ hasId(?p, ?id) ^ swrlb:matches(?id, 1) ^ hasMemory(?p, ?m) ^ hasDescription(?m, ?d) ^ hasRobot(?p, ?robot) ^ hasPlayMusicAction(?robot, ?action) ^ hasMusic(?action, ?music) ^ hasSinger(?music, ?singer) ^ hasId(?music, ?musicid) ^ swrlb:contains(?d, ?singer) -> sqwrl:select(?musicid) |
| SQWRL query | Patient(?p) ^ hasId(?p, ?id) ^ swrlb:matches(?id, 1) ^ hasMemory(?p, ?m) ^ hasDescription(?m, ?d) ^ swrlb:contains(?d, \”Michael Jackson\”) ^ hasRobot(?p, ?robot) ^ hasMusic(?robot, ?music) ^ hasSinger(?music, ?singer) ^ swrlb:contains(?singer, \”Michael Jackson\”) -> hasKnowledgeOfMusic(?p,?music) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anghel, I.; Cioara, T.; Moldovan, D.; Antal, M.; Pop, C.D.; Salomie, I.; Pop, C.B.; Chifu, V.R. Smart Environments and Social Robots for Age-Friendly Integrated Care Services. Int. J. Environ. Res. Public Health 2020, 17, 3801. https://doi.org/10.3390/ijerph17113801
Anghel I, Cioara T, Moldovan D, Antal M, Pop CD, Salomie I, Pop CB, Chifu VR. Smart Environments and Social Robots for Age-Friendly Integrated Care Services. International Journal of Environmental Research and Public Health. 2020; 17(11):3801. https://doi.org/10.3390/ijerph17113801
Chicago/Turabian StyleAnghel, Ionut, Tudor Cioara, Dorin Moldovan, Marcel Antal, Claudia Daniela Pop, Ioan Salomie, Cristina Bianca Pop, and Viorica Rozina Chifu. 2020. "Smart Environments and Social Robots for Age-Friendly Integrated Care Services" International Journal of Environmental Research and Public Health 17, no. 11: 3801. https://doi.org/10.3390/ijerph17113801
APA StyleAnghel, I., Cioara, T., Moldovan, D., Antal, M., Pop, C. D., Salomie, I., Pop, C. B., & Chifu, V. R. (2020). Smart Environments and Social Robots for Age-Friendly Integrated Care Services. International Journal of Environmental Research and Public Health, 17(11), 3801. https://doi.org/10.3390/ijerph17113801