Accuracy Assessment of the Planar Morphology of Valley Bank Gullies Extracted with High Resolution Remote Sensing Imagery on the Loess Plateau, China

 ,
,
Abstract
1. Introduction
2. Materials and Methods
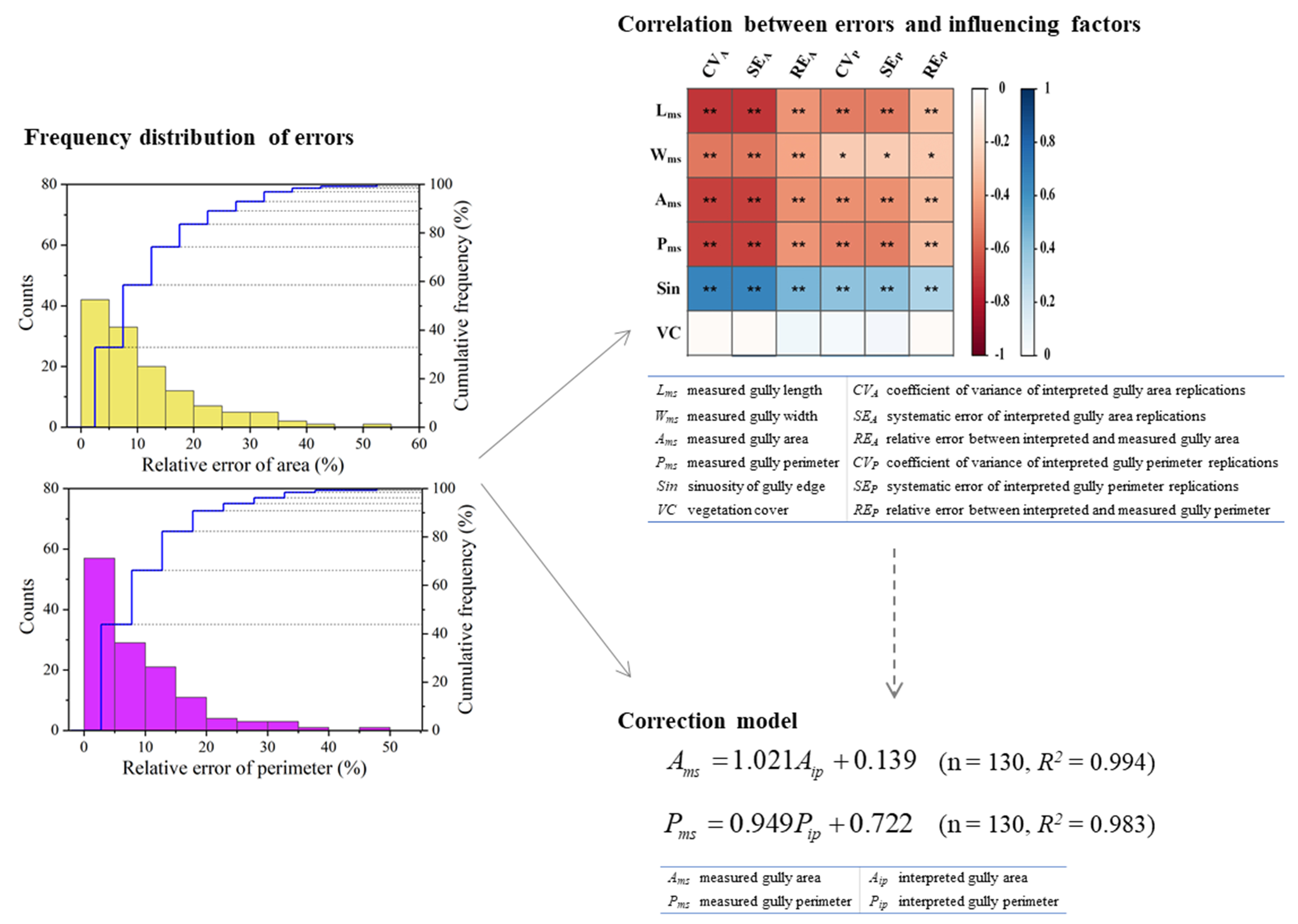
2.1. Study Area and Gully Types
2.2. Pleiades Image
2.3. Field-Measured Data
2.4. Gully Interpreting from Image
2.5. Assessment of Interpretation Accuracy
2.6. Factors Potentially Influencing Gully Interpreting
2.7. Software and Methods for Data Analysis
3. Results
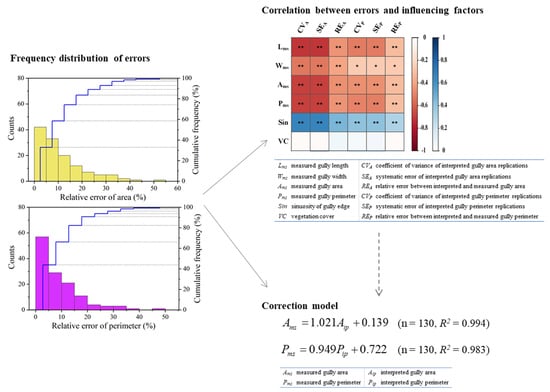
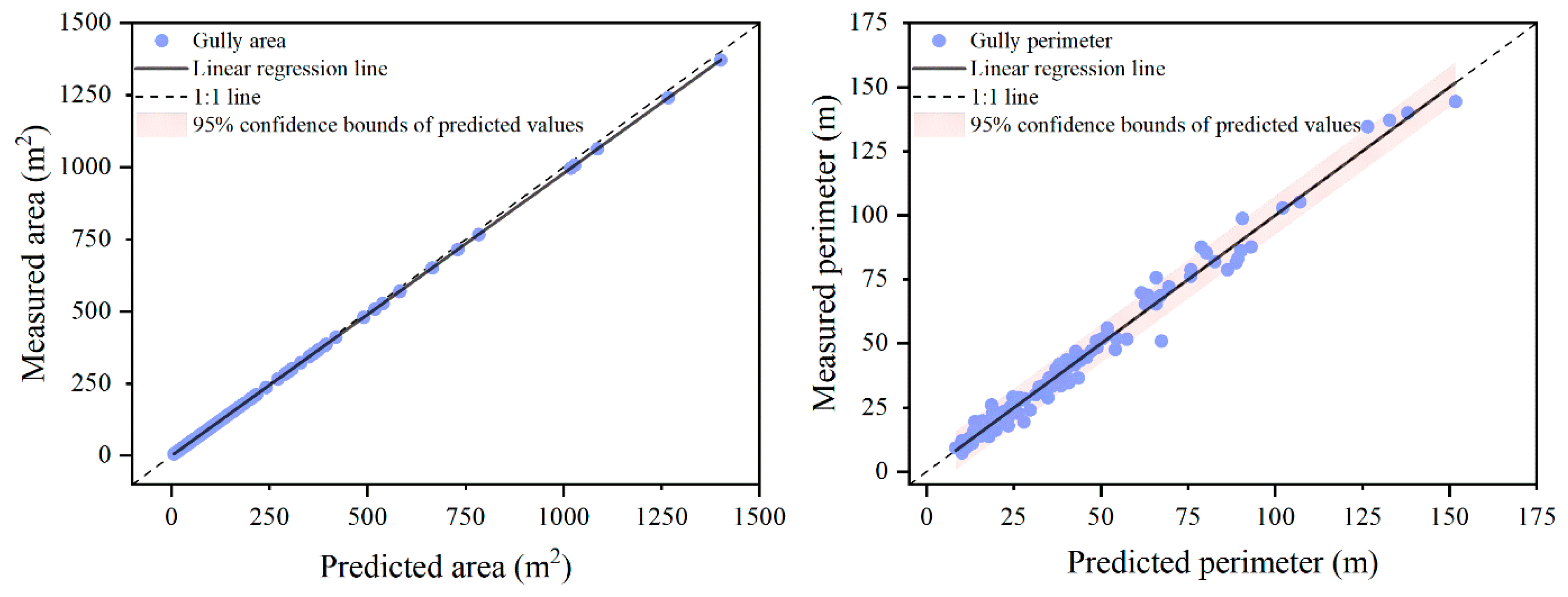
3.1. Accuracy Assessment of Interpreted Gullies
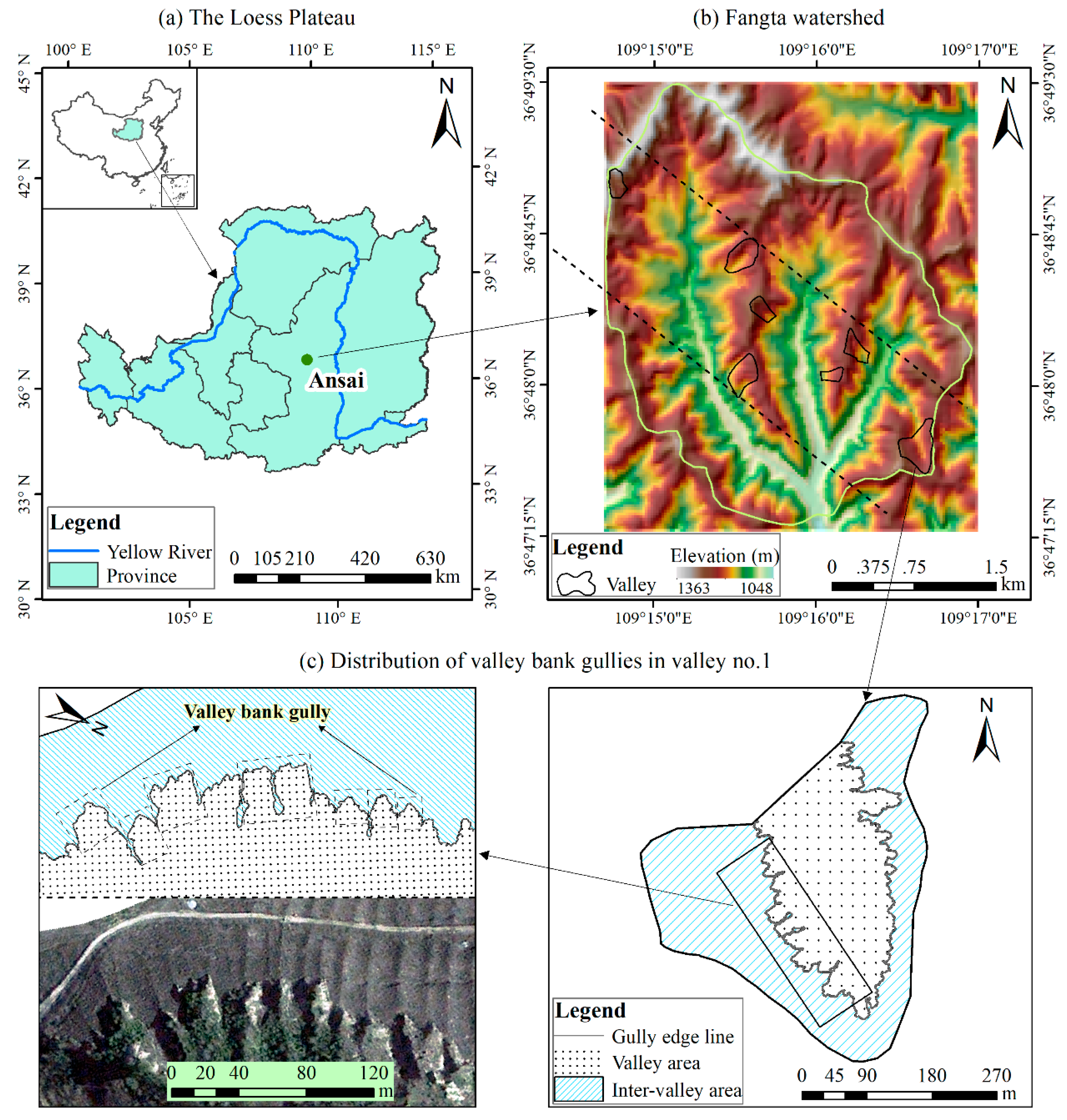
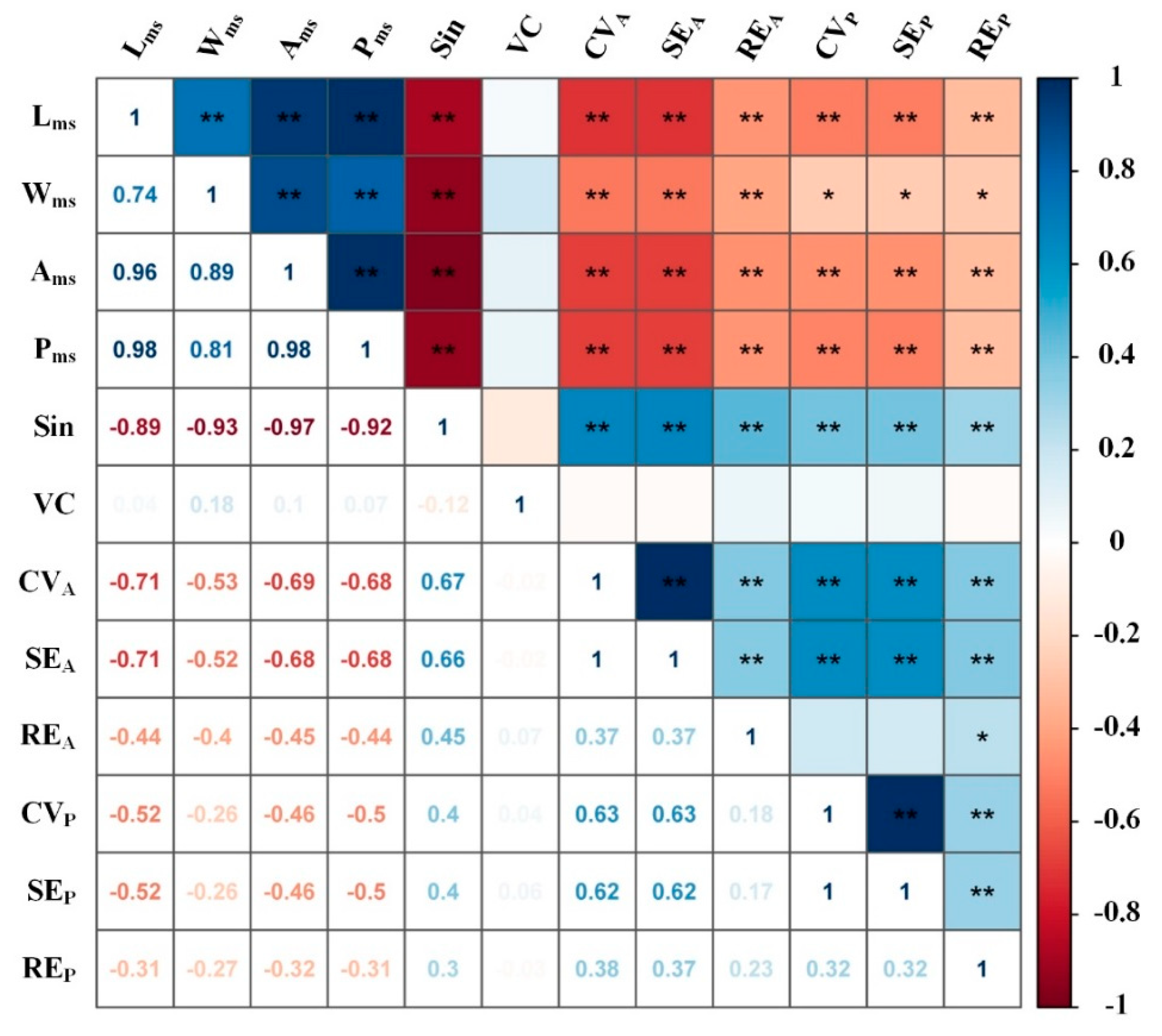
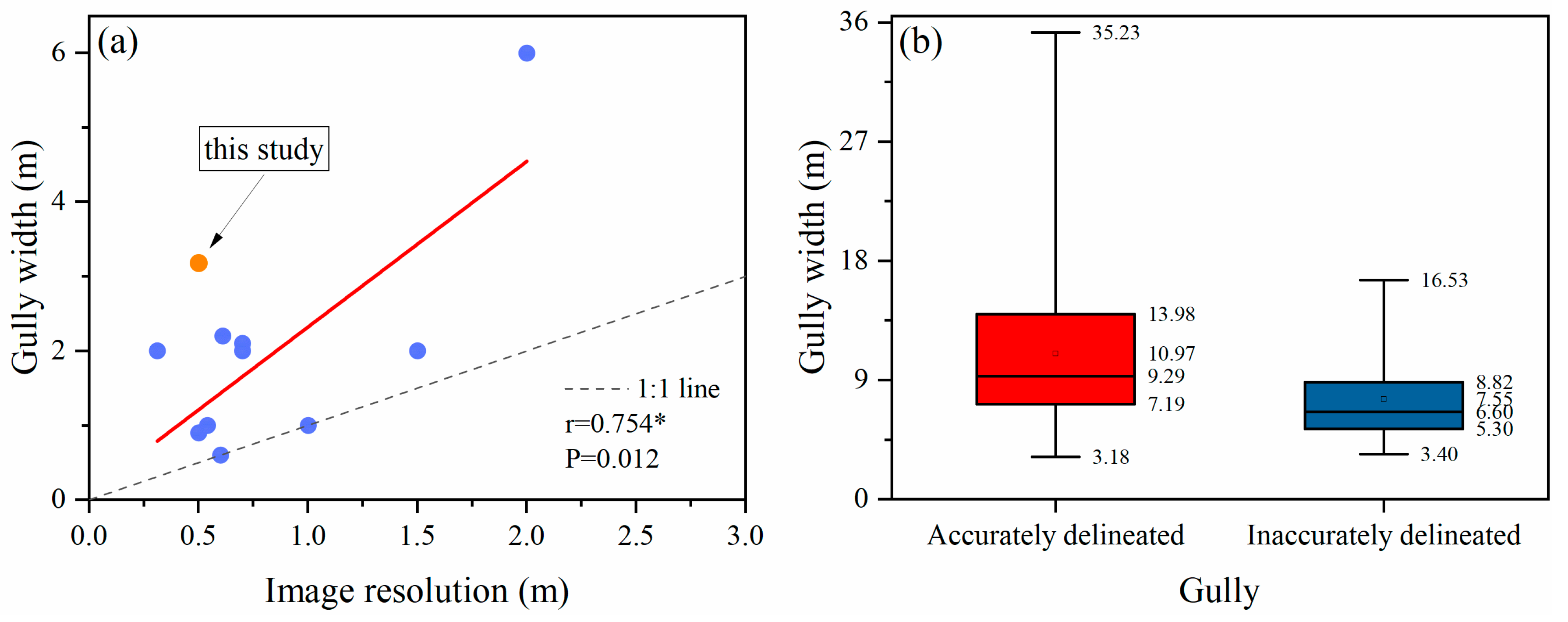
3.2. Influence of Potential Factors on Gully Interpreting Accuracy
3.3. Correction Model of Interpreted Gully Morphology Parameters
4. Discussion
4.1. A quantitative Standard to Judge Gully Delineating Accuracy
4.2. Gully Width Detection Limit of Remote Sensing Imagery in the Loess Plateau
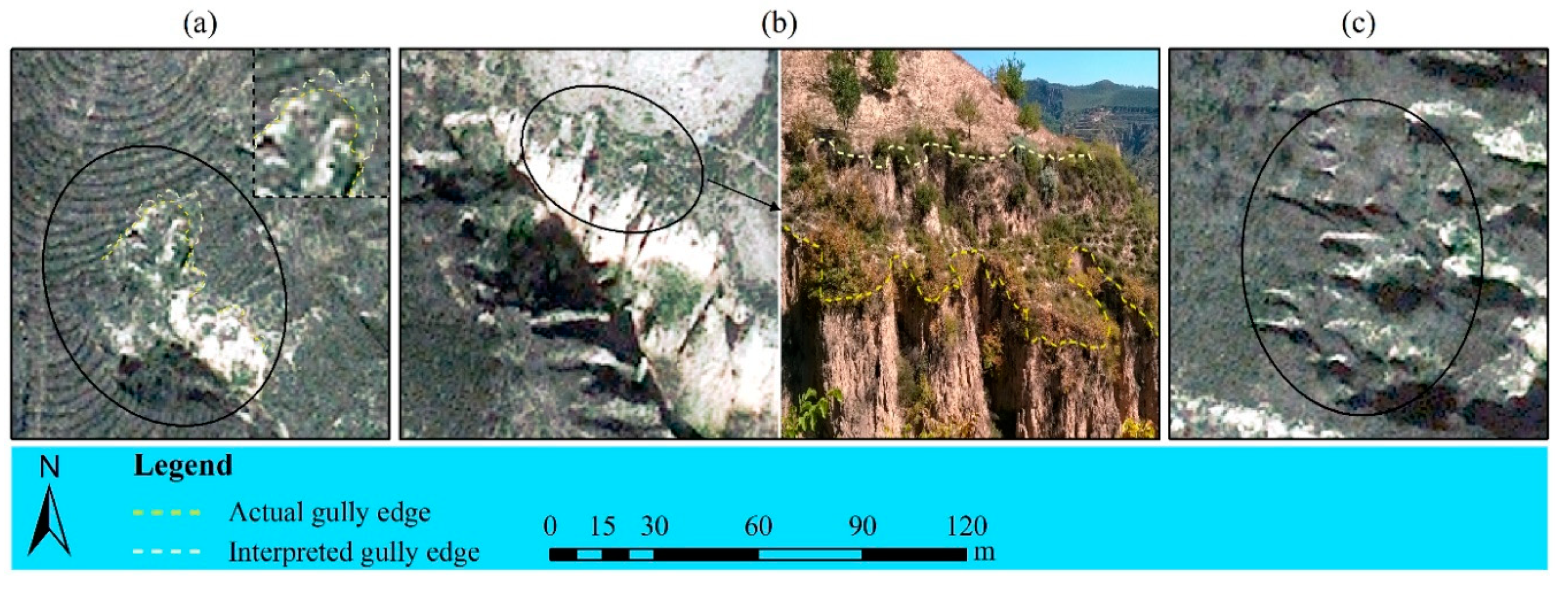
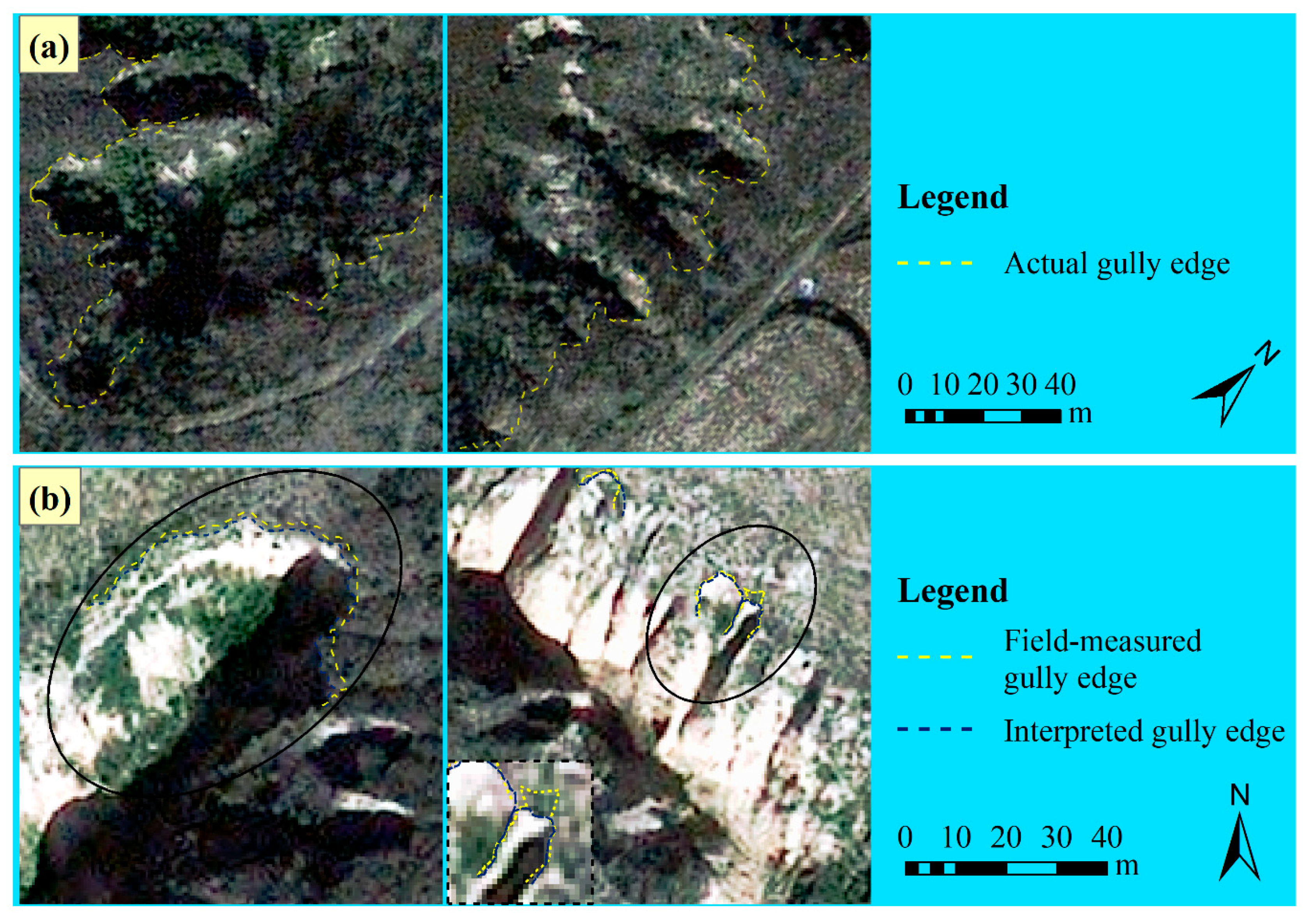
4.3. The Causes of Higher Gully Interpreting Errors
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, Z.; Zhang, Y.; Zhu, Q.; He, Y.; Yao, W. Assessment of bank gully development and vegetation coverage on the Chinese Loess Plateau. Geomorphology 2015, 228, 462–469. [Google Scholar] [CrossRef]
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully erosion and environmental change: Importance and research needs. Catena 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Desprats, J.F.; Raclot, D.; Rousseau, M.; Cerdan, O.; Garcin, M.; Le Bissonnais, Y.; Ben Slimane, A.; Fouche, J.; Monfort-Climent, D. Mapping linear erosion features using high and very high resolution satellite imagery. Land Degrad. Dev. 2013, 24, 22–32. [Google Scholar] [CrossRef]
- Valentin, C.; Poesen, J.; Li, Y. Gully erosion: Impacts, factors and control. Catena 2005, 63, 132–153. [Google Scholar] [CrossRef]
- Eitel, B.; Eberle, J.; Kuhn, R. Holocene environmental change in the Otjiwarongo thornbush savanna (Northern Namibia): Evidence from soils and sediments. Catena 2002, 47, 43–62. [Google Scholar] [CrossRef]
- Costa, F.M.; Prado Bacellar, L.D.A. Analysis of the influence of gully erosion in the flow pattern of catchment streams, Southeastern Brazil. Catena 2007, 69, 230–238. [Google Scholar] [CrossRef]
- Verstraeten, G.; Poesen, J.; de Vente, J.; Koninckx, X. Sediment yield variability in Spain: A quantitative and semiqualitative analysis using reservoir sedimentation rates. Geomorphology 2003, 50, 327–348. [Google Scholar] [CrossRef]
- Shi, H.; Shao, M. Soil and water loss from the Loess Plateau in China. J. Arid Environ. 2000, 45, 9–20. [Google Scholar] [CrossRef]
- Poesen, J.W.A.; Hooke, J.M. Erosion, flooding and channel management in Mediterranean environments of southern Europe. Prog. Phys. Geogr. 1997, 21, 157–199. [Google Scholar] [CrossRef]
- Vandekerckhove, L.; Poesen, J.; Wijdenes, D.O.; Gyssels, G.; Beuselinck, L.; de Luna, E. Characteristics and controlling factors of bank gullies in two semi-arid mediterranean environments. Geomorphology 2000, 33, 37–58. [Google Scholar] [CrossRef]
- Perroy, R.L.; Bookhagen, B.; Asner, G.P.; Chadwick, O.A. Comparison of gully erosion estimates using airborne and ground-based LiDAR on Santa Cruz Island, California. Geomorphology 2010, 118, 288–300. [Google Scholar] [CrossRef]
- Li, Y.; Poesen, J.; Yang, J.C.; Fu, B.; Zhang, J.H. Evaluating gully erosion using 137Cs and 210Pb/137Cs ratio in a reservoir catchment. Soil Tillage Res. 2003, 69, 107–115. [Google Scholar] [CrossRef]
- Casalí, J.; Loizu, J.; Campo, M.A.; De Santisteban, L.M.; Álvarez-Mozos, J. Accuracy of methods for field assessment of rill and ephemeral gully erosion. Catena 2006, 67, 128–138. [Google Scholar] [CrossRef]
- Casali, J.; Lopez, J.J.; Giraldez, J.V. Ephemeral gully erosion in southern Navarra (Spain). Catena 1999, 36, 65–84. [Google Scholar] [CrossRef]
- Hessel, R.; van Asch, T. Modelling gully erosion for a small catchment on the Chinese Loess Plateau. Catena 2003, 54, 131–146. [Google Scholar] [CrossRef]
- Ionita, I.; Niacsu, L.; Petrovici, G.; Blebea-Apostu, A.M. Gully development in eastern Romania: A case study from Falciu Hills. Nat. Hazards 2015, 79, S113–S138. [Google Scholar] [CrossRef]
- Castillo, C.; Perez, R.; James, M.R.; Quinton, J.N.; Taguas, E.V.; Gomez, J.A. Comparing the Accuracy of Several Field Methods for Measuring Gully Erosion. Soil Sci. Soc. Am. J. 2012, 76, 1319–1332. [Google Scholar] [CrossRef]
- Capra, A.; Scicolone, B. Ephemeral gully erosion in a wheat-cultivated area in Sicily (Italy). Biosyst. Eng. 2002, 83, 119–126. [Google Scholar] [CrossRef]
- Wu, Y.Q.; Cheng, H. Monitoring of gully erosion on the Loess Plateau of China using a global positioning system. Catena 2005, 63, 154–166. [Google Scholar] [CrossRef]
- James, L.A.; Watson, D.G.; Hansen, W.F. Using LiDAR data to map gullies and headwater streams under forest canopy: South Carolina, USA. Catena 2007, 71, 132–144. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.; Zhu, Q.; Yang, S.; Li, H.; Ma, H. A gully erosion assessment model for the Chinese Loess Plateau based on changes in gully length and area. Catena 2017, 148, 195–203. [Google Scholar] [CrossRef]
- Wu, H.; Xu, X.; Zheng, F.; Qin, C.; He, X. Gully morphological characteristics in the loess hilly-gully region based on 3D laser scanning technique. Earth Surf. Process. Landf. 2018, 43, 1701–1710. [Google Scholar] [CrossRef]
- Vrieling, A.; Rodrigues, S.C.; Bartholomeus, H.; Sterk, G. Automatic identification of erosion gullies with ASTER imagery in the Brazilian Cerrados. Int. J. Remote Sens. 2007, 28, 2723–2738. [Google Scholar] [CrossRef]
- Peter, K.D.; d’Oleire-Oltmanns, S.; Ries, J.B.; Marzolff, I.; Hssaine, A.A. Soil erosion in gully catchments affected by land-levelling measures in the Souss Basin, Morocco, analysed by rainfall simulation and UAV remote sensing data. Catena 2014, 113, 24–40. [Google Scholar] [CrossRef]
- Stoecker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetry—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, S.; Pu, L.; Yang, J.; Yang, C.; Chen, J.; Guan, C.; Wang, Q.; Chen, D.; Fu, B.; et al. Gully Erosion Mapping and Monitoring at Multiple Scales Based on Multi-Source Remote Sensing Data of the Sancha River Catchment, Northeast China. ISPRS Int. J. Geo-Inf. 2016, 5, 200. [Google Scholar] [CrossRef]
- Gimenez, R.; Marzolff, I.; Campo, M.A.; Seeger, M.; Ries, J.B.; Casali, J.; Alvarez-Mozos, J. Accuracy of high-resolution photogrammetric measurements of gullies with contrasting morphology. Earth Surf. Process. Landf. 2009, 34, 1915–1926. [Google Scholar] [CrossRef]
- Vrieling, A. Satellite remote sensing for water erosion assessment: A review. Catena 2006, 65, 2–18. [Google Scholar] [CrossRef]
- Knight, J.; Spencer, J.R.; Brooks, A.P.; Phinn, S. Large-Area, High-Resolution Remote Sensing Based Mapping of Alluvial Gully Erosion in Australia’s Tropical Rivers. In Proceedings of the 5th Australian Stream Management Conference, Austrilian Rivers: Making a Difference, Albury, NSW, Australia, 21–25 May 2007; pp. 199–204. [Google Scholar]
- Maugnard, A.; Cordonnier, H.; Degre, A.; Demarcin, P.; Pineux, N.; Bielders, C.L. Uncertainty assessment of ephemeral gully identification, characteristics and topographic threshold when using aerial photographs in agricultural settings. Earth Surf. Process. Landf. 2014, 39, 1319–1330. [Google Scholar] [CrossRef]
- Metternicht, G.I.; Zinck, J.A. Evaluating the information content of JERS-1 SAR and Landsat TM data for discrimination of soil erosion features. ISPRS-J. Photogramm. Remote Sens. 1998, 53, 143–153. [Google Scholar] [CrossRef]
- El Tahir, M.E.H.; Kaab, A.; Xu, C.Y. Identification and mapping of soil erosion areas in the Blue Nile, Eastern Sudan using multispectral ASTER and MODIS satellite data and the SRTM elevation model. Hydrol. Earth Syst. Sci. 2010, 14, 1167–1178. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V. Object-based gully feature extraction using high spatial resolution imagery. Geomorphology 2011, 134, 260–268. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V.; Stein, A. Object-based gully system prediction from medium resolution imagery using Random Forests. Geomorphology 2014, 216, 283–294. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V.; Abdellah, L.; Machmach, I. Quantifying temporal changes in gully erosion areas with object oriented analysis. Catena 2015, 128, 262–277. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Rango, A. Texture and Scale in Object-Based Analysis of Subdecimeter Resolution Unmanned Aerial Vehicle (UAV) Imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 761–770. [Google Scholar] [CrossRef]
- King, C.; Baghdadi, N.; Lecomte, V.; Cerdan, O. The application of remote-sensing data to monitoring and modelling of soil erosion. Catena 2005, 62, 79–93. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS-J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Liu, K.; Ding, H.; Tang, G.; Zhu, A.X.; Yang, X.; Jiang, S.; Cao, J. An Object-based Approach for Two-level Gully Feature Mapping Using High-resolution DEM and Imagery: A Case Study on Hilly Loess Plateau Region, China. Chin. Geogr. Sci. 2017, 27, 415–430. [Google Scholar] [CrossRef]
- Castillo, C.; Taguas, E.V.; Zarco-Tejada, P.; James, M.R.; Gomez, J.A. The normalized topographic method: An automated procedure for gully mapping using GIS. Earth Surf. Process. Landf. 2014, 39, 2002–2015. [Google Scholar] [CrossRef]
- Evans, M.; Lindsay, J. High resolution quantification of gully erosion in upland peatlands at the landscape scale. Earth Surf. Process. Landf. 2010, 35, 876–886. [Google Scholar] [CrossRef]
- Liu, K.; Ding, H.; Tang, G.A.; Song, C.Q.; Liu, Y.W.; Jiang, L.; Zhao, B.Y.; Gao, Y.F.; Ma, R.H. Large-scale mapping of gully-affected areas: An approach integrating Google Earth images and terrain skeleton information. Geomorphology 2018, 314, 13–26. [Google Scholar] [CrossRef]
- Vrieling, A.; Rodrigues, S.C. Erosion assessment in the Brazilian Cerrados using multi-temporal SAR imagery. In Proceedings of the 2004 Envisat & ERS Symposium, Salzburg, Austria, 6–10 September 2004; ESA: Salzburg, Austria, 2004. [Google Scholar]
- Frankl, A.; Poesen, J.; Deckers, J.; Haile, M.; Nyssen, J. Gully head retreat rates in the semi-arid highlands of Northern Ethiopia. Geomorphology 2012, 173, 185–195. [Google Scholar] [CrossRef]
- Vandekerckhove, L.; Poesen, J.; Govers, G. Medium-term gully headcut retreat rates in Southeast Spain determined from aerial photographs and ground measurements. Catena 2003, 50, 329–352. [Google Scholar] [CrossRef]
- Yu, W.-J.; Jiao, J.-Y.; Chen, Y.; Wang, D.-L.; Wang, N.; Zhao, H.-K. Seed Removal due to Overland Flow on Abandoned Slopes in the Chinese Hilly Gullied Loess Plateau Region. Land Degrad. Dev. 2017, 28, 274–282. [Google Scholar] [CrossRef]
- Yu, W.-J.; Jiao, J.-Y.; Wang, D.-L.; Wang, N.; Wang, Z.-J.; Zhao, H.-K. Seed population dynamics on abandoned slopes in the hill and gully Loess Plateau region of China. Ecol. Eng. 2016, 94, 427–436. [Google Scholar] [CrossRef]
- Kou, M.; Garcia-Fayos, P.; Hu, S.; Jiao, J. The effect of Robinia pseudoacacia afforestation on soil and vegetation properties in the Loess Plateau (China): A chronosequence approach. For. Ecol. Manag. 2016, 375, 146–158. [Google Scholar] [CrossRef]
- Li, M.; Zhang, X.; Pang, G.; Han, F. The estimation of soil organic carbon distribution and storage in a small catchment area of the Loess Plateau. Catena 2013, 101, 11–16. [Google Scholar] [CrossRef]
- Wei, Y.; He, Z.; Jiao, J.; Li, Y.; Chen, Y.; Zhao, H. Variation in the sediment deposition behind check-dams under different soil erosion conditions on the Loess Plateau, China. Earth Surf. Process. Landf. 2018, 43, 1899–1912. [Google Scholar] [CrossRef]
- Liu, Y.B.; Zhu, X.M.; Zhou, P.H.; Tang, K.L. The Laws of Hillslope Channel Erosion Occurrence and Development on Loess Plateau. Mem. NISWC Acad. Sin. 1988, 7, 9–18, (In Chinese with English Abstract). [Google Scholar]
- Golosov, V.; Yermolaev, O.; Rysin, I.; Vanmaercke, M.; Medvedeva, R.; Zaytseva, M. Mapping and spatial-temporal assessment of gully density in the Middle Volga region, Russia. Earth Surf. Process. Landf. 2018, 43, 2818–2834. [Google Scholar] [CrossRef]
- Wang, Z.J.; Jiao, J.Y.; Rayburg, S.; Wang, Q.L.; Su, Y. Soil erosion resistance of “Grain for Green” vegetation types under extreme rainfall conditions on the Loess Plateau, China. Catena 2016, 141, 109–116. [Google Scholar] [CrossRef]
- Chen, Y.; Jiao, J.; Wei, Y.; Zhao, H. Characteristics of gully development in Northern Shaanxi Hilly Loess Region before Grain-for-Green Programme (1976–1997). Trans. Chin. Soc. Agric. Eng. 2017, 33, 120–127, (In Chinese with English Abstract). [Google Scholar]
- Qin, W.; Zhu, Q.; Zhao, L.; Kuang, G. Topographic characteristics of ephemeral gully erosion in loess hilly and gully region based on RS and GIS. Trans. Chin. Soc. Agric. Eng. 2010, 26, 58–64, (In Chinese with English Abstract). [Google Scholar]
- Frankl, A.; Poesen, J.; Scholiers, N.; Jacob, M.; Haile, M.; Deckers, J.; Nyssen, J. Factors controlling the morphology and volume (V)-length (L) relations of permanent gullies in the northern Ethiopian Highlands. Earth Surf. Process. Landf. 2013, 38, 1672–1684. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. In Proceedings of the 3rd ERTS Symposium, Washington, DC, USA, 10–14 December 1973; pp. 309–317. [Google Scholar]
- Qi, J.; Marsett, R.C.; Moran, M.S.; Goodrich, D.C.; Heilman, P.; Kerr, Y.H.; Dedieu, G.; Chehbouni, A.; Zhang, X.X. Spatial and temporal dynamics of vegetation in the San Pedro River basin area. Agric. For. Meteorol. 2000, 105, 55–68. [Google Scholar] [CrossRef]
- Zävoianu, I. Morphometry of Drainage Basins; Elsevier: New York, NY, USA, 1985; Volume 20. [Google Scholar]
- Hadley, W. ggplot2: Elegant Graphics for Data Analysis; Springer: New York, NY, USA, 2016. [Google Scholar]
- Frankl, A.; Poesen, J.; Haile, M.; Deckers, J.; Nyssen, J. Quantifying long-term changes in gully networks and volumes in dryland environments: The case of Northern Ethiopia. Geomorphology 2013, 201, 254–263. [Google Scholar] [CrossRef]
- Frankl, A.; Zwertvaegher, A.; Poesen, J.; Nyssen, J. Transferring Google Earth observations to GIS-software: Example from gully erosion study. Int. J. Dig. Earth 2013, 6, 196–201. [Google Scholar] [CrossRef]
- Ben Slimane, A.; Raclot, D.; Rebai, H.; Le Bissonnais, Y.; Planchon, O.; Bouksila, F. Combining field monitoring and aerial imagery to evaluate the role of gully erosion in a Mediterranean catchment (Tunisia). Catena 2018, 170, 73–83. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, S.; Wang, R.; Pu, L.; Chang, L.; Yang, J. Study on gully erosion distribution in Northeast black soil areas based on Pleiades. J. Northeast Normal Univ. 2016, 48, 138–144, (In Chinese with English Abstract). [Google Scholar]
- Vrieling, A.; de Jong, S.M.; Sterk, G.; Rodrigues, S.C. Timing of erosion and satellite data: A multi-resolution approach to soil erosion risk mapping. Int. J. Appl. Earth Obs. Geoinf. 2008, 10, 267–281. [Google Scholar] [CrossRef]
- Warren, S.D.; Hohmann, M.G.; Auerswald, K.; Mitasova, H. An evaluation of methods to determine slope using digital elevation data. Catena 2004, 58, 215–233. [Google Scholar] [CrossRef]
- Xiao, C.; Tang, G. Classification of valley shoulder line in Loess Relief. Arid Land Geogr. 2007, 30, 646–653, (In Chinese with English Abstract). [Google Scholar]
- Marzolff, I.; Poesen, J. The potential of 3D gully monitoring with GIS using high-resolution aerial photography and a digital photogrammetry system. Geomorphology 2009, 111, 48–60. [Google Scholar] [CrossRef]
- Wagner, W.; Verhoest, N.E.C.; Ludwig, R.; Tedesco, M. Editorial ‘Remote sensing in hydrological sciences’. Hydrol. Earth Syst. Sci. 2009, 13, 813–817. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area (m2) | Perimeter (m) | ||
|---|---|---|---|
| Absolute Error | Systematic Error | Absolute Error | Systematic Error |
| 12.8 ± 16.5A | 2.8 ± 3.4B | 2.9 ± 3.1A | 0.9 ± 0.9B |
| Gully Types | AEA/AT | Percentage (%) |
|---|---|---|
| Accurately delineated (AEA/AT ≤ 1.00) | 0.42 ± 0.28 | 80.77 |
| Not accurately delineated (AEA/AT > 1.00) | 1.61 ± 0.82 | 19.23 |
| All | 0.65 ± 0.64 | 100 |
| Causes | REA | REP | ||
|---|---|---|---|---|
| Percentage (%) | Relative Error (%) | Percentage (%) | Relative Error (%) | |
| Broken topography | 26.47 | 42.20 ± 30.73 | 36.36 | 27.46 ± 8.17 |
| Vegetation cover | 38.24 | 25.17 ± 9.18 | 36.36 | 24.64 ± 10.18 |
| Deviation in measured data | 20.59 | 24.79 ± 7.58 | 18.18 | 20.21 ± 5.49 |
| Gully growth | 2.94 | 20.19 | 4.55 | 17.97 |
| Shadow | 11.76 | 18.97 ± 1.69 | 4.55 | 18.76 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Jiao, J.; Wei, Y.; Zhao, H.; Yu, W.; Cao, B.; Xu, H.; Yan, F.; Wu, D.; Li, H. Accuracy Assessment of the Planar Morphology of Valley Bank Gullies Extracted with High Resolution Remote Sensing Imagery on the Loess Plateau, China. Int. J. Environ. Res. Public Health 2019, 16, 369. https://doi.org/10.3390/ijerph16030369
Chen Y, Jiao J, Wei Y, Zhao H, Yu W, Cao B, Xu H, Yan F, Wu D, Li H. Accuracy Assessment of the Planar Morphology of Valley Bank Gullies Extracted with High Resolution Remote Sensing Imagery on the Loess Plateau, China. International Journal of Environmental Research and Public Health. 2019; 16(3):369. https://doi.org/10.3390/ijerph16030369
Chicago/Turabian StyleChen, Yixian, Juying Jiao, Yanhong Wei, Hengkang Zhao, Weijie Yu, Binting Cao, Haiyan Xu, Fangchen Yan, Duoyang Wu, and Hang Li. 2019. "Accuracy Assessment of the Planar Morphology of Valley Bank Gullies Extracted with High Resolution Remote Sensing Imagery on the Loess Plateau, China" International Journal of Environmental Research and Public Health 16, no. 3: 369. https://doi.org/10.3390/ijerph16030369
APA StyleChen, Y., Jiao, J., Wei, Y., Zhao, H., Yu, W., Cao, B., Xu, H., Yan, F., Wu, D., & Li, H. (2019). Accuracy Assessment of the Planar Morphology of Valley Bank Gullies Extracted with High Resolution Remote Sensing Imagery on the Loess Plateau, China. International Journal of Environmental Research and Public Health, 16(3), 369. https://doi.org/10.3390/ijerph16030369