
TCSA: A Traffic Congestion Situation Assessment Scheme Based on Multi-Index Fuzzy Comprehensive Evaluation in 5G-IoV



Abstract
:1. Introduction
1.1. Background
1.2. Related Work
1.3. Proposed Contributions
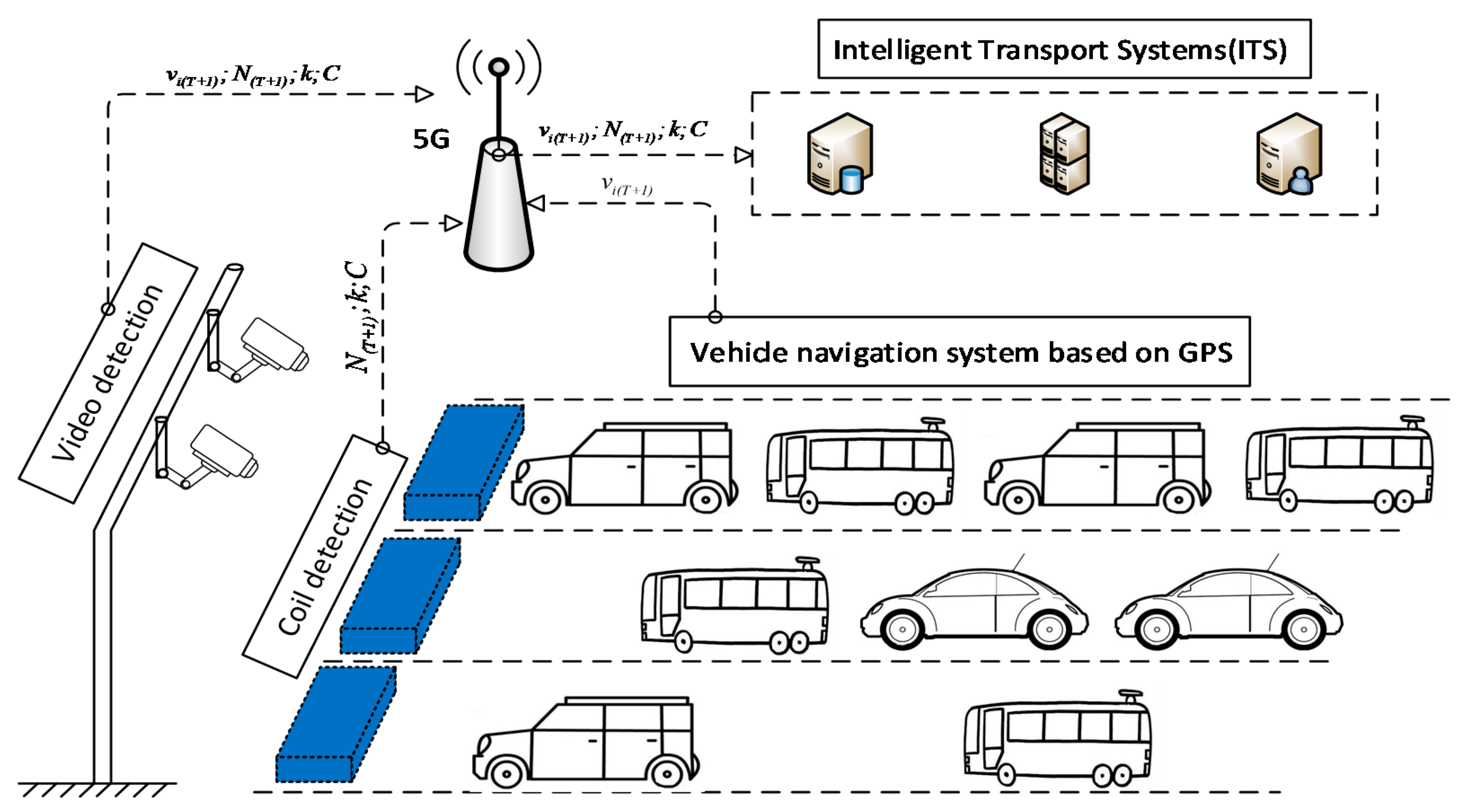
2. Real-Time Traffic Flow Data System and Definitions in 5G-IoV
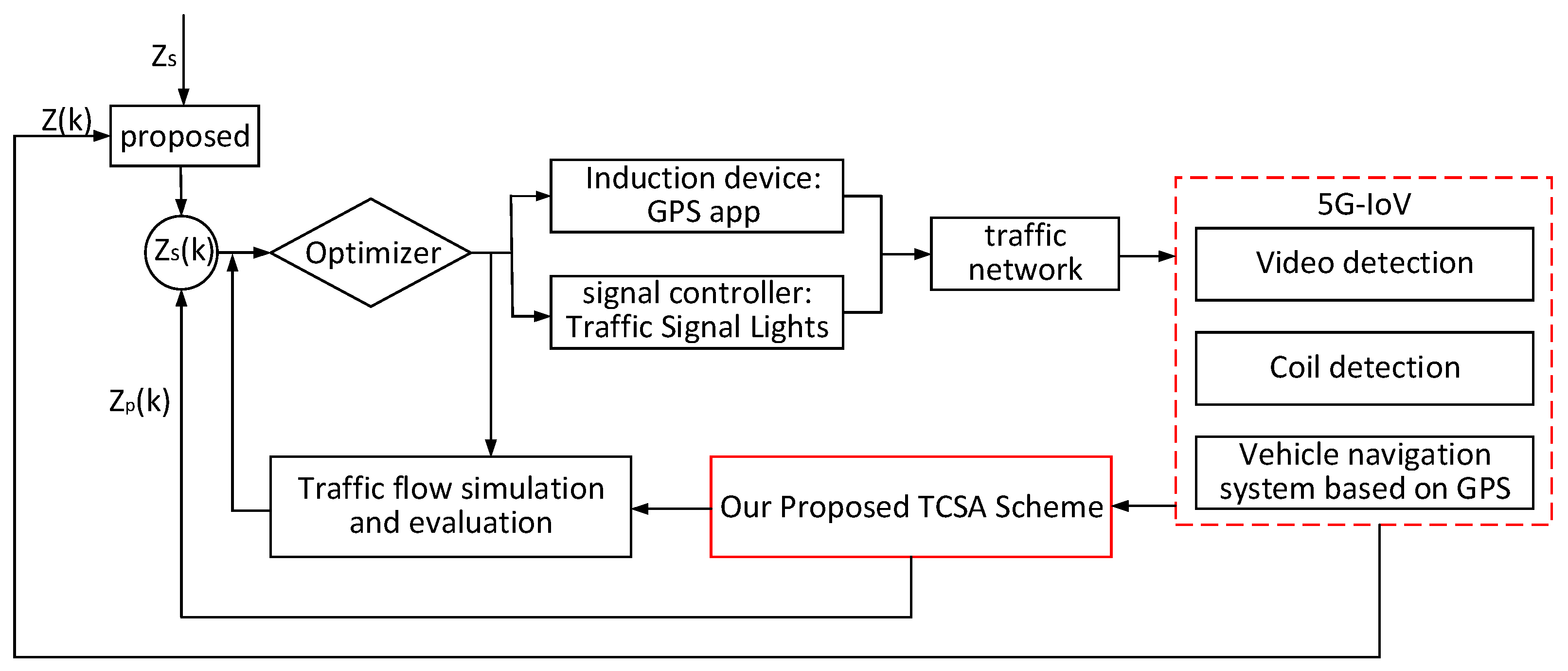
3. Our Proposed TCSA Scheme
3.1. Selection of Traffic Congestion Evaluation Indicators
3.2. Predicted Value of the Evaluation Index
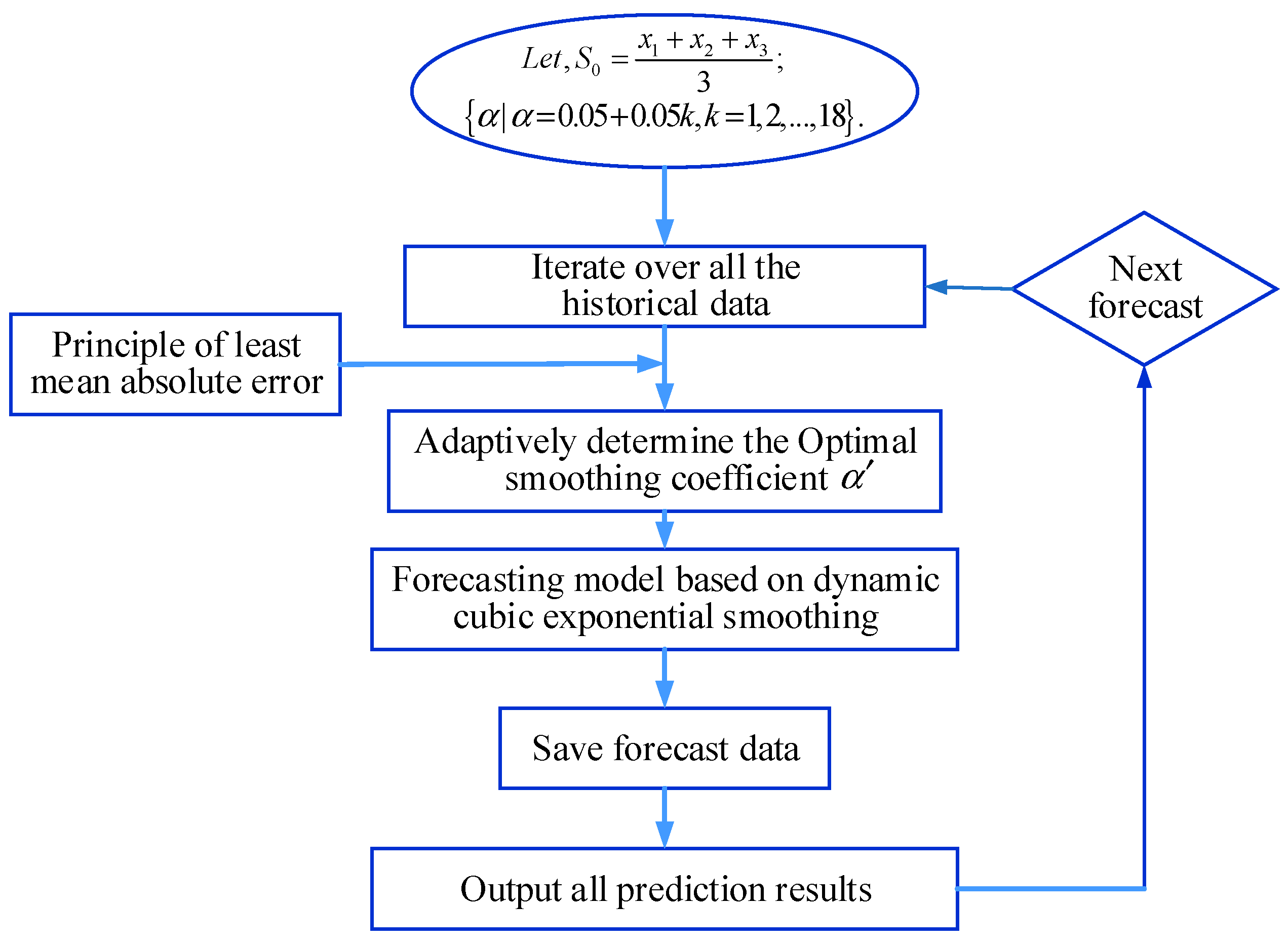
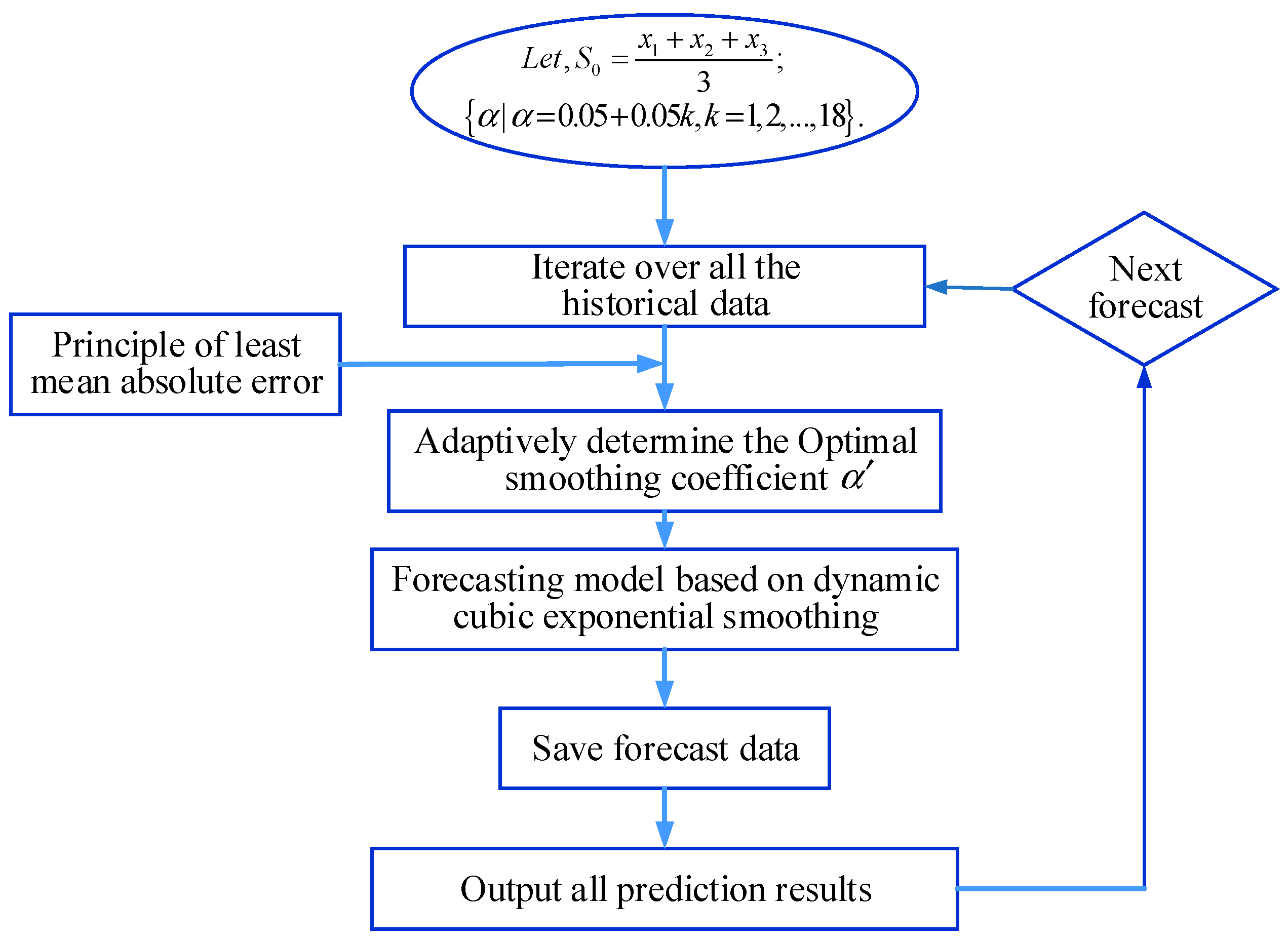
3.2.1. Traffic Flow Parameter Prediction
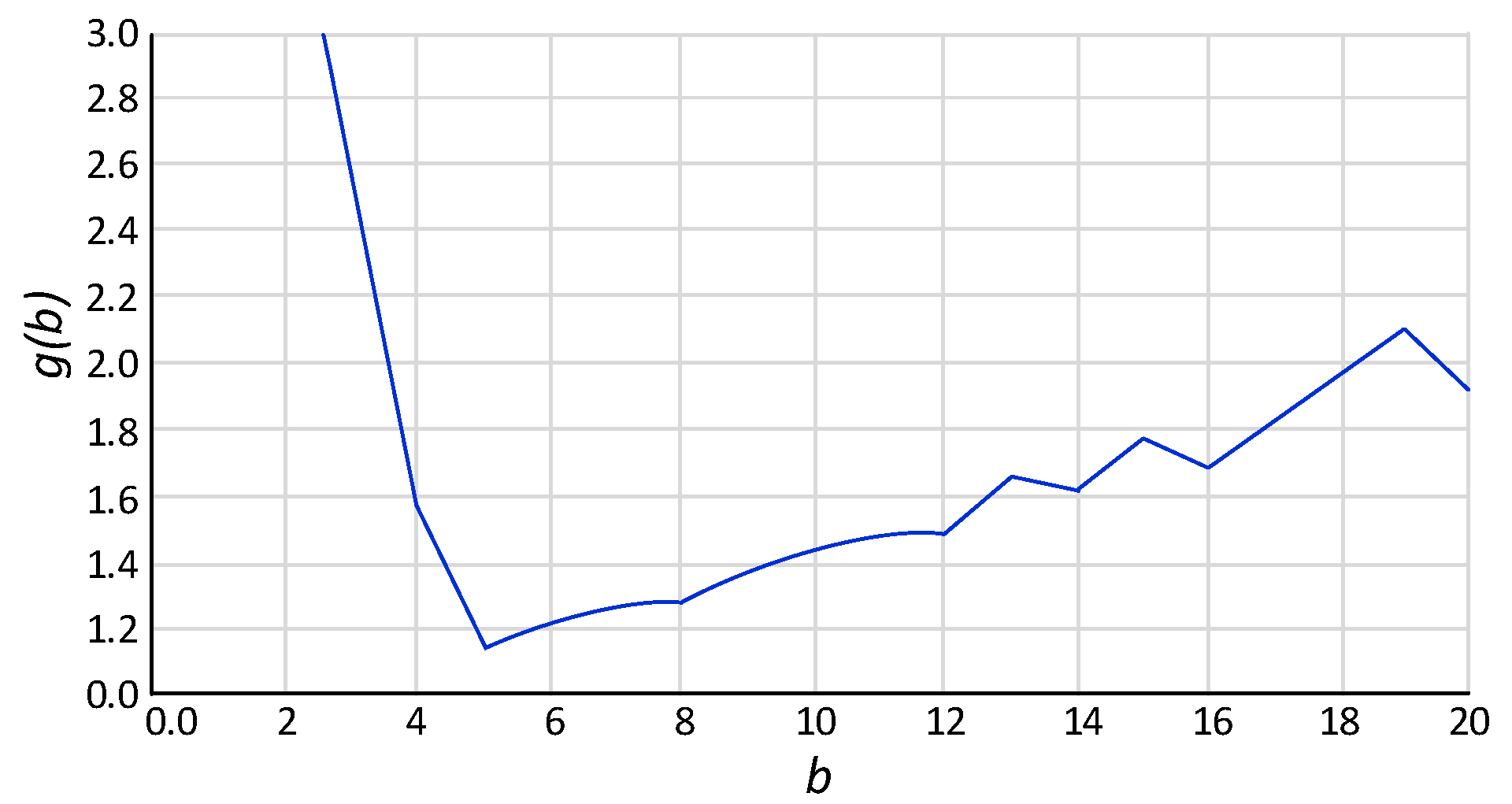
- Optimal smoothing coefficient dynamic calculation method
- ii.
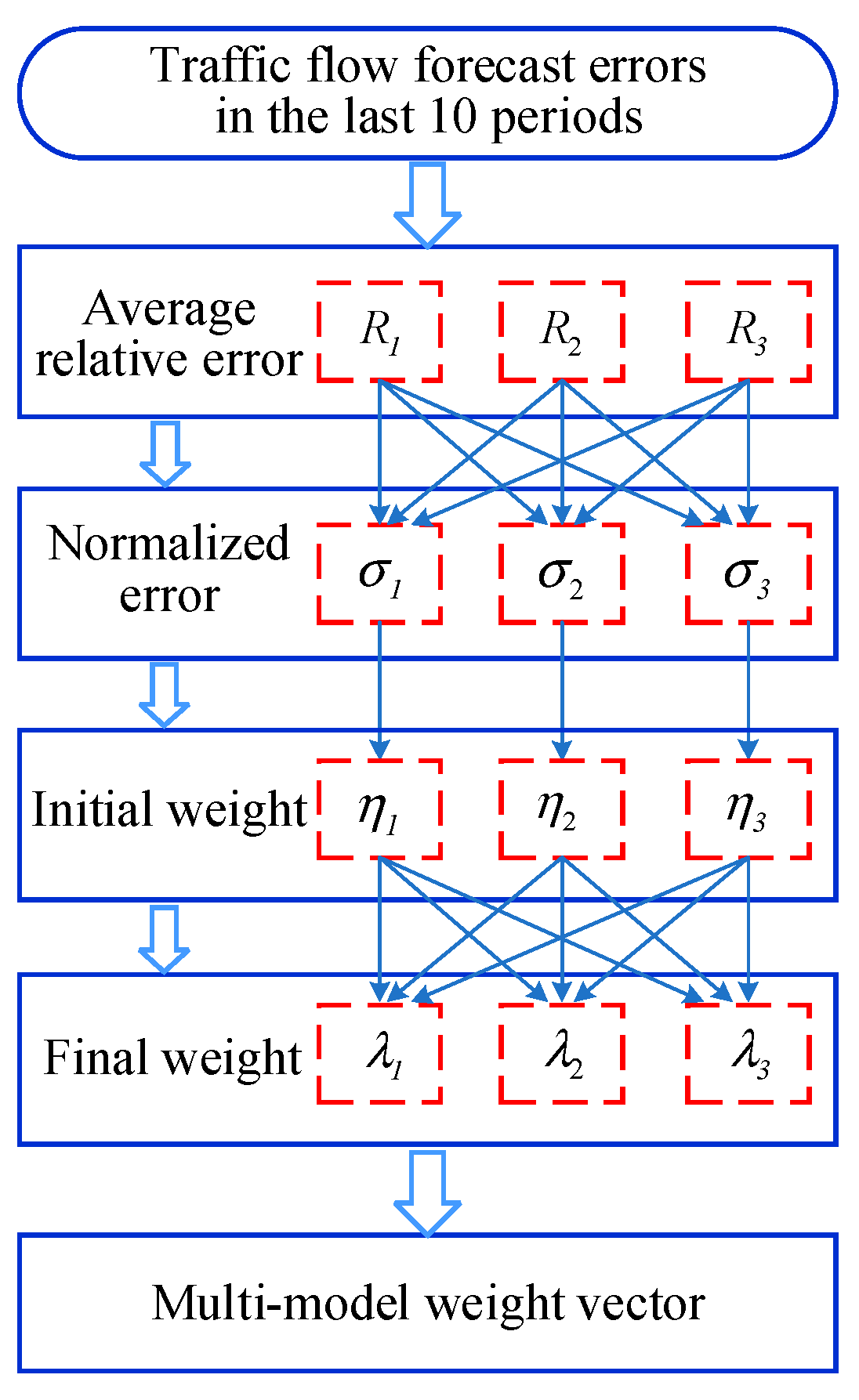
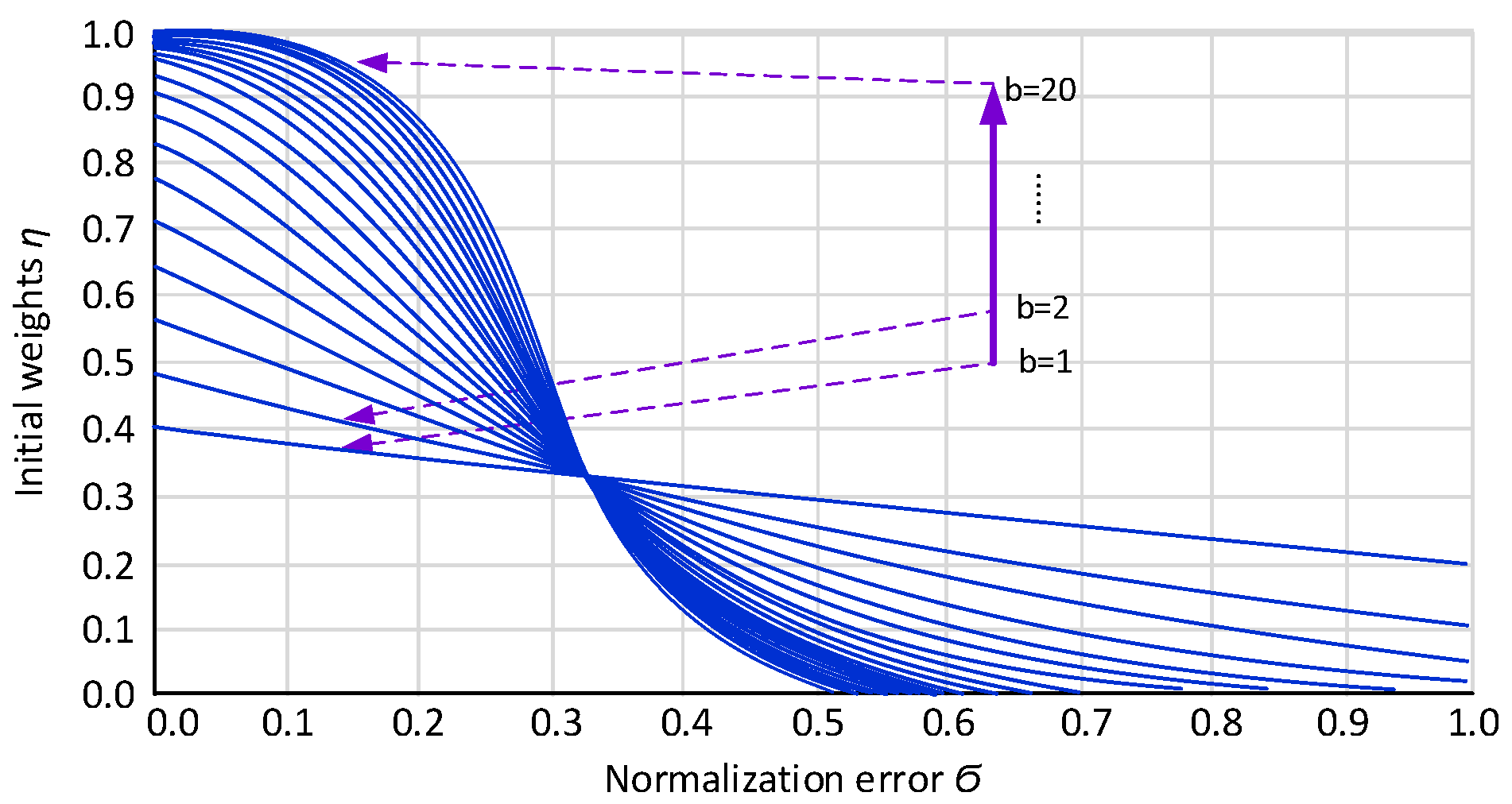
- Multi-model weight vector dynamic calculation method
3.2.2. Calculate the Predicted Value of the Evaluation Index
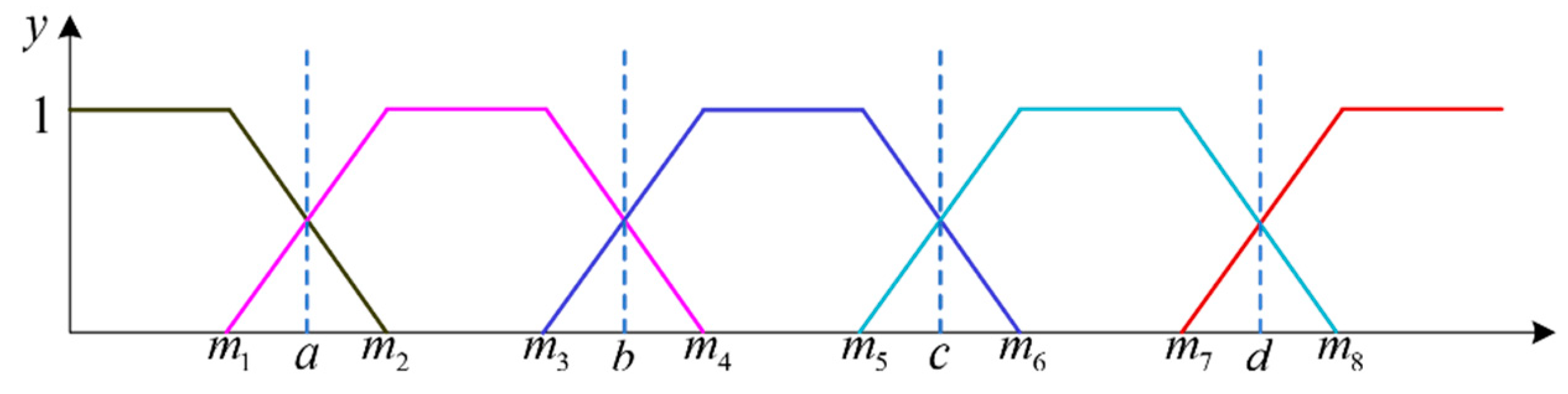
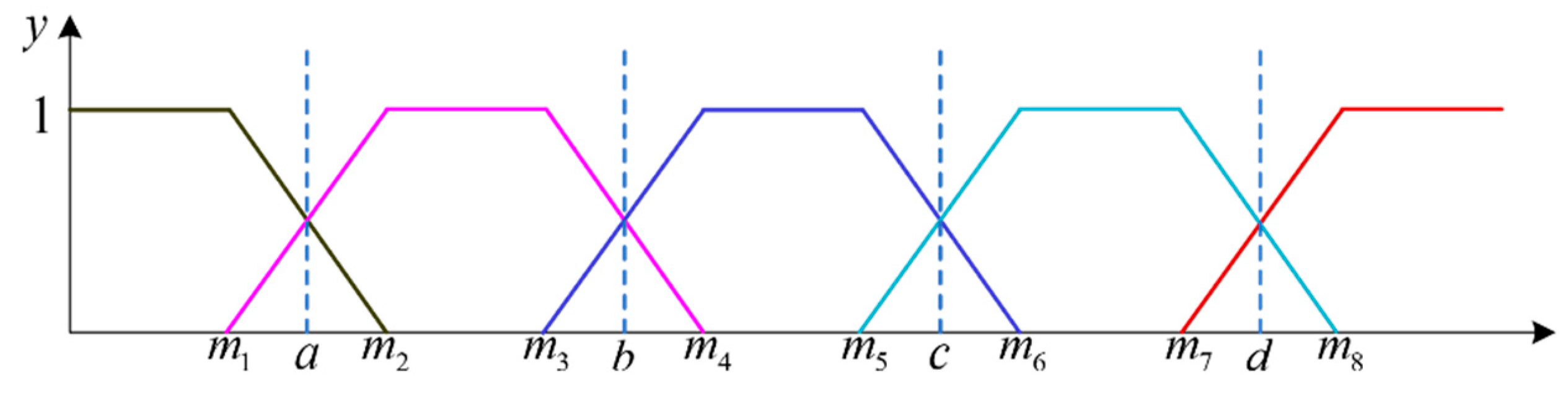
3.3. Select Membership Function
3.4. Confirming the Weight of the Evaluation Index
3.5. Confirming the Level of Traffic Congestion
4. Performance Analysis
4.1. Data Description
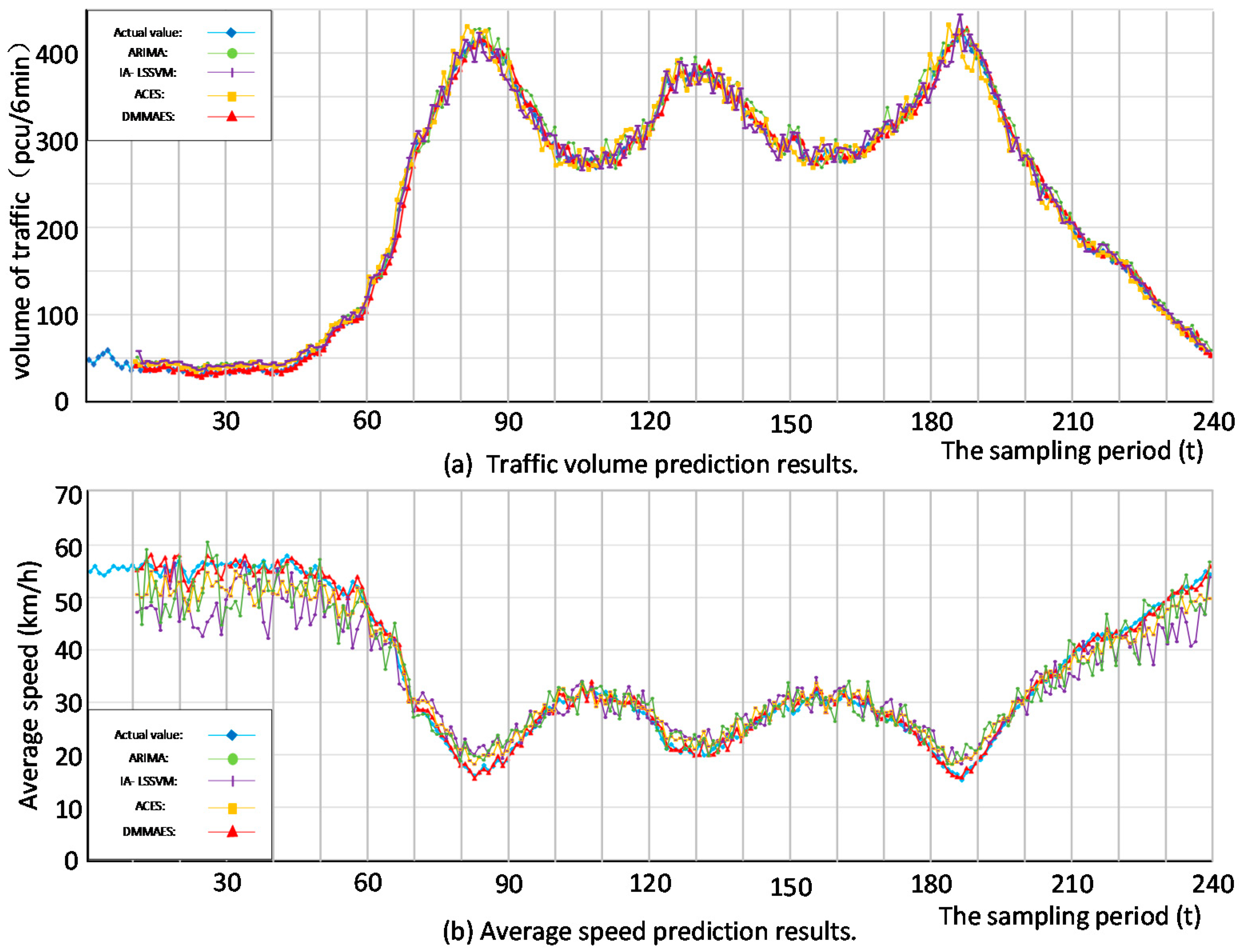
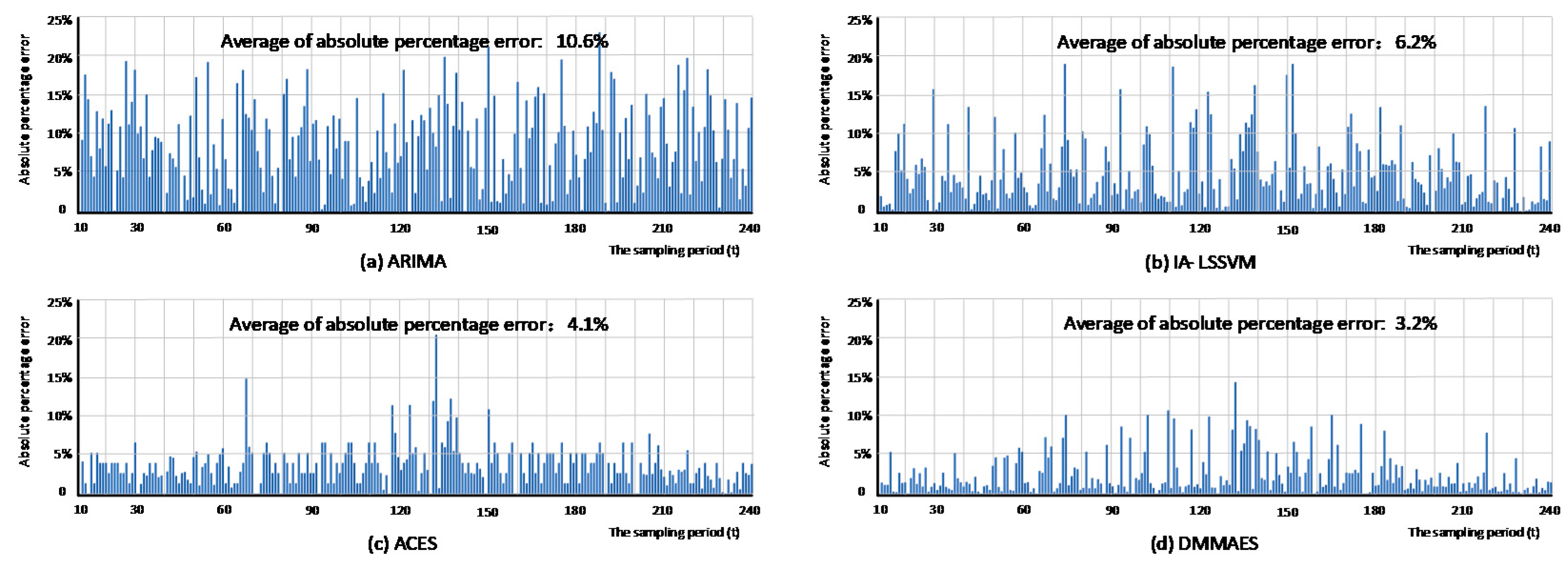
4.2. Predicted Results of Traffic Flow Parameters
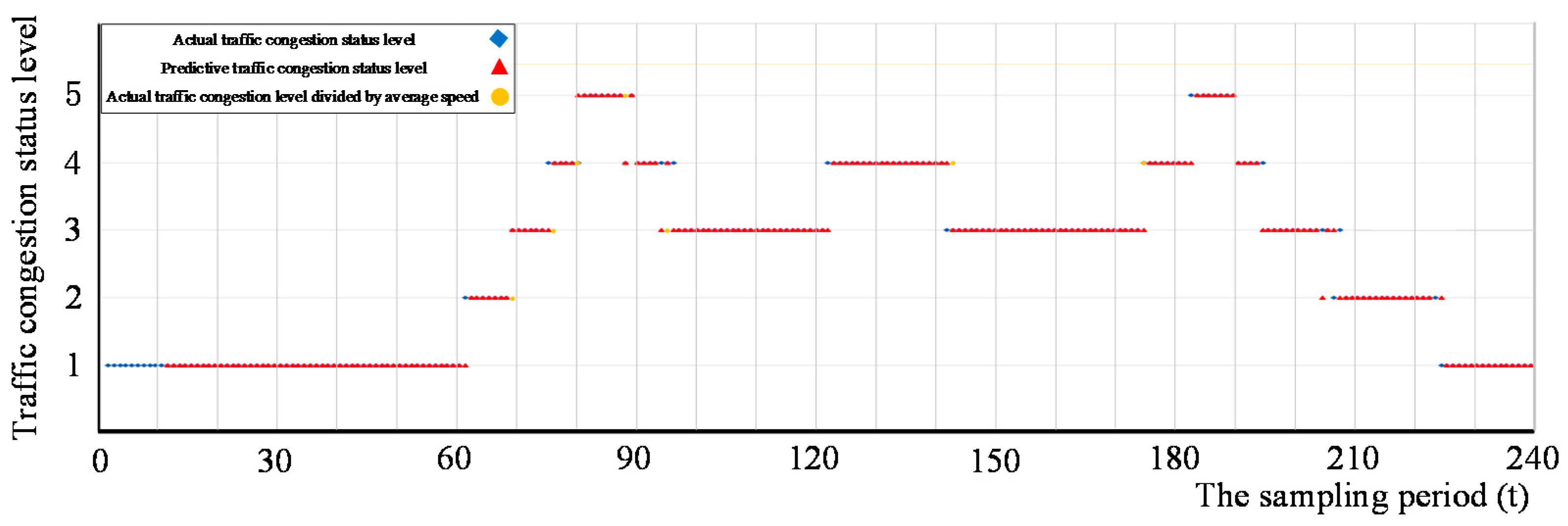
4.3. Predicted Results of Traffic Congestion Level
4.4. Application of the TCSA Scheme in Traffic Management
5. Conclusions and Future Work
- (1)
- The DMMAES prediction algorithm can dynamically adjust the smoothing coefficient and weight of the model according to the changing trend of traffic flow parameters;
- (2)
- The membership degree of the traffic congestion index was calculated using the trapezoidal membership function. The boundaries among the various thresholds that conform to the traffic congestion state was not clear, and there was ambiguity;
- (3)
- The adaptive CRITIC method was used to determine the weights of traffic congestion evaluation indicators, which can reflect not only the conflict between the indicators, but also the impact of the indicators on the traffic congestion in different periods.
- (1)
- Enhance 5G-IoV perception capabilities, such as the ability to perceive weather changes and traffic accidents;
- (2)
- Increase the traffic flow prediction step size without reducing the prediction accuracy;
- (3)
- Add new traffic congestion evaluation indicators and propose corresponding weight calculation methods. Next, we will consider the impact of weather conditions and the service level of public transportation near roads on traffic congestion and try to develop a combination of a subjective and objective weighting method to determine the index weight.
Author Contributions
Funding
Conflicts of Interest
References
- Chow, A.H.; Santacreu, A.; Tsapakis, I.; Tanasaranond, G.; Cheng, T. Empirical assessment of urban traffic congestion. J. Adv. Transp. 2014, 48, 1000–1016. [Google Scholar] [CrossRef] [Green Version]
- Knorr, F.; Baselt, D.; Schreckenberg, M.; Mauve, M. Reducing traffic jams via VANETs. IEEE Trans. Veh. Technol. 2012, 61, 3490–3498. [Google Scholar] [CrossRef]
- Wu, F.; Stern, R.E.; Cui, S.; Delle Monache, M.L.; Bhadani, R.; Bunting, M.; Miles, C.; Nathaniel, H.; R’mani, H.; Benedetto, P.; et al. Tracking vehicle trajectories and fuel rates in phantom traffic jams: Methodology and data. Transp. Res. Part C Emerg. Technol. 2019, 99, 82–109. [Google Scholar] [CrossRef] [Green Version]
- Fabre, M.; Faure, S.; Laurière, M.; Maury, B.; Perrin, C. Non classical solution of a conservation law arising in vehicular traffic modelling. ESAIM Proc. Surv. 2016, 55, 131–147. [Google Scholar] [CrossRef] [Green Version]
- Sjoberg, K.; Andres, P.; Buburuzan, T.; Brakemeier, A. Cooperative intelligent transport systems in Europe: Current deployment status and outlook. IEEE Veh. Technol. Mag. 2017, 12, 89–97. [Google Scholar] [CrossRef]
- Yin, J.; Lo, W.; Deng, S.; Li, Y.; Wu, Z.; Xiong, N. Colbar: A collaborative location-based regularization framework for QoS prediction. Inf. Sci. 2014, 265, 68–84. [Google Scholar] [CrossRef]
- Kumar, P.M.; Manogaran, G.; Sundarasekar, R.; Chilamkurti, N.; Varatharajan, R. Ant colony optimization algorithm with internet of vehicles for intelligent traffic control system. Comput. Netw. 2018, 144, 154–162. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhou, C.; Tian, Y.C.; Xiong, N.; Qin, Y.; Hu, B. A fuzzy probability Bayesian network approach for dynamic cybersecurity risk assessment in industrial control systems. IEEE Trans. Ind. Inform. 2017, 14, 2497–2506. [Google Scholar] [CrossRef] [Green Version]
- Sharif, A.; Li, J.P.; Saleem, M.A. Internet of things enabled vehicular and ad hoc networks for smart city traffic monitoring and controlling: A review. Int. J. Adv. Netw. Appl. 2018, 10, 3833–3842. [Google Scholar] [CrossRef]
- Guo, W.; Xiong, N.; Vasilakos, A.V.; Chen, G.; Cheng, H. Multi-source temporal data aggregation in wireless sensor networks. Wirel. Pers. Commun. 2011, 56, 359–370. [Google Scholar] [CrossRef]
- Ray, P.P. A survey on Internet of Things architectures. J. King Saud Univ.-Comput. Inf. Sci. 2018, 30, 291–319. [Google Scholar]
- Chen, M.; Tian, Y.; Fortino, G.; Zhang, J.; Humar, I. Cognitive internet of vehicles. Comput. Commun. 2018, 120, 58–70. [Google Scholar] [CrossRef]
- Xu, W.; Zhou, H.; Cheng, N.; Lyu, F.; Shi, W.; Chen, J.; Shen, X. Internet of vehicles in big data era. IEEE/CAA J. Autom. Sin. 2018, 5, 19–35. [Google Scholar] [CrossRef]
- Shankar, H.; Raju, P.L.N.; Rao, K.R.M. Multi model criteria for the estimation of road traffic congestion from traffic flow information based on fuzzy logic. J. Transp. Technol. 2012, 2, 50. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Da Xu, L.; Zhao, S. 5G Internet of Things: A survey. J. Ind. Inf. Integr. 2018, 10, 1–9. [Google Scholar] [CrossRef]
- Duan, W.; Gu, J.; Wen, M.; Zhang, G.; Ji, Y.; Mumtaz, S. Emerging Technologies for 5G-IoV Networks: Applications, Trends and Opportunities. IEEE Netw. 2020, 34, 283–289. [Google Scholar] [CrossRef]
- Wang, Z.; Li, T.; Xiong, N.; Pan, Y. A novel dynamic network data replication scheme based on historical access record and proactive deletion. J. Supercomput. 2012, 62, 227–250. [Google Scholar] [CrossRef]
- Ahmad, M.; Chen, Q.; Khan, Z. Microscopic Congestion Detection Protocol in VANETs. J. Adv. Transp. 2018, 2018, 6387063. [Google Scholar] [CrossRef]
- Rao, A.M.; Rao, K.R. Measuring urban traffic congestion-a review. Int. J. Traffic Transp. Eng. 2012, 2, 286–305. [Google Scholar]
- Lu, Y.; Wu, S.; Fang, Z.; Xiong, N.; Yoon, S.; Park, D.S. Exploring finger vein based personal authentication for secure IoT. Future Gener. Comput. Syst. 2017, 77, 149–160. [Google Scholar] [CrossRef]
- Yao, Y.; Xiong, N.; Park, J.H.; Ma, L.; Liu, J. Privacy-preserving max/min query in two-tiered wireless sensor networks. Comput. Math. Appl. 2013, 65, 1318–1325. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, C.; Wu, Q.; Ma, J.; Zhang, G.; Milton, J. Spatial-temporal traffic congestion identification and correlation extraction using floating car data. J. Intell. Transp. Syst. 2020, 25, 263–280. [Google Scholar] [CrossRef]
- He, F.; Yan, X.; Liu, Y.; Ma, L. A traffic congestion assessment method for urban road networks based on speed performance index. Procedia Eng. 2016, 137, 425–433. [Google Scholar] [CrossRef] [Green Version]
- Yang, P.; Xiong, N.; Ren, J. Data security and privacy protection for cloud storage: A survey. IEEE Access 2020, 8, 131723–131740. [Google Scholar] [CrossRef]
- Smilowitz, K.R.; Daganzo, C.F. Reproducible features of congested highway traffic. Math. Comput. Model. 2002, 35, 509–515. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhao, Q.P. Study on RTI congestion control based on the layer of interest. J. Softw. 2004, 15, 120–130. [Google Scholar]
- Gore, R.; Kamensky, D.; Diallo, S.; Padilla, J. Statistical debugging for simulations. ACM Trans. Modeling Comput. Simul. (TOMACS) 2015, 25, 1–26. [Google Scholar] [CrossRef]
- Kamensky, D.; Gore, R.; Reynolds, P.F. Applying enhanced fault localization technology to Monte Carlo simulations. In Proceedings of the 2011 Winter Simulation Conference (WSC), Phoenix, AZ, USA, 11–14 December 2011; pp. 2798–2809. [Google Scholar]
- Altunkaynak, A.; Özger, M.; Çakmakci, M. Water consumption prediction of Istanbul city by using fuzzy logic approach. Water Resour. Manag. 2005, 19, 641–654. [Google Scholar] [CrossRef]
- Akkurt, S.; Tayfur, G.; Can, S. Fuzzy logic model for the prediction of cement compressive strength. Cem. Concr. Res. 2004, 34, 1429–1433. [Google Scholar] [CrossRef] [Green Version]
- Qu, Y.; Xiong, N.N. RFH: A resilient, fault-tolerant and high-efficient replication algorithm for distributed cloud storage. In Proceedings of the 41st International Conference on Parallel Processing, Pittsburgh, PA, USA, 10–13 September 2012; pp. 520–529. [Google Scholar]
- Habtemichael, F.G.; Cetin, M. Short-term traffic flow rate forecasting based on identifying similar traffic patterns. Transp. Res. Part C Emerg. Technol. 2016, 66, 61–78. [Google Scholar] [CrossRef]
- Qi, S.; Jiang, D.; Huo, L. A Prediction Approach to End-to-End Traffic in Space Information Networks. Mob. Netw. Appl. 2019, 26, 726–735. [Google Scholar] [CrossRef]
- Luo, X.; Li, D.; Yang, Y.; Zhang, S. Spatiotemporal traffic flow prediction with KNN and LSTM. J. Adv. Transp. 2019, 2019, 4145353. [Google Scholar] [CrossRef] [Green Version]
- Shen, M.; Wei, M.; Zhu, L.; Wang, M. Classification of encrypted traffic with second-order markov chains and application attribute bigrams. IEEE Trans. Inf. Forensics Secur. 2017, 12, 1830–1843. [Google Scholar] [CrossRef]
- Xu, D.; Wei, C.; Peng, P.; Xuan, Q.; Guo, H. GE-GAN: A novel deep learning framework for road traffic state estimation. Transp. Res. Part C Emerg. Technol. 2020, 117, 102635. [Google Scholar] [CrossRef]
- Kadkhodaei, M.; Shad, R. Analysis and Evaluation of Traffic Congestion Control Methods in Touristic Metropolis Using Analytical Hierarchy Process (AHP). Civ. Eng. J. 2018, 4, 602–608. [Google Scholar] [CrossRef]
- Wan, R.; Xiong, N. An energy-efficient sleep scheduling mechanism with similarity measure for wireless sensor networks. Hum.-Cent. Comput. Inf. Sci. 2018, 8, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Berrouk, S.; Fazziki, A.E.; Sadgal, M. Fuzzy-Based Approach for Assessing Traffic Congestion in Urban Areas. Int. Conf. Image Signal Process. 2020, 12119, 112–121. [Google Scholar]
- Kong, X.; Xu, Z.; Shen, G.; Wang, J.; Yang, Q.; Zhang, B. Urban traffic congestion estimation and prediction based on floating car trajectory data. Future Gener. Comput. Syst. 2016, 61, 97–107. [Google Scholar] [CrossRef]
- Wan, Z.; Xiong, N.; Ghani, N.; Vasilakos, A.V.; Zhou, L. Adaptive unequal protection for wireless video transmission over IEEE 802.11 e networks. Multimed. Tools Appl. 2014, 72, 541–571. [Google Scholar] [CrossRef]
- Ermagun, A.; Levinson, D. Spatiotemporal traffic forecasting: Review and proposed directions. Transp. Rev. 2018, 38, 786–814. [Google Scholar] [CrossRef]
- He, R.; Xiong, N.; Yang, L.T.; Park, J.H. Using multi-modal semantic association rules to fuse keywords and visual features automatically for web image retrieval. Inf. Fusion 2011, 12, 223–230. [Google Scholar] [CrossRef]
- Shafi, M.; Molisch, A.F.; Smith, P.; Haustein, T.; Zhu, P.; De Silva, P.; Tufvesson, F.; Benjebbour, A.; Wunder, G. 5G: A tutorial overview of standards, trials, challenges, deployment, and practice. IEEE J. Sel. Areas Commun. 2017, 35, 1201–1221. [Google Scholar] [CrossRef]
- Wu, M.; Tan, L.; Xiong, N. A structure fidelity approach for big data collection in wireless sensor networks. Sensors 2015, 15, 248–273. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, S.; Liu, A.; Wang, T.; Xiong, N.N. BD-VTE: A novel baseline data based verifiable trust evaluation scheme for smart network systems. IEEE Trans. Netw. Sci. Eng. 2020, 8, 2087–2105. [Google Scholar] [CrossRef]
- Li, H.; Liu, J.; Wu, K.; Yang, Z.; Liu, R.W.; Xiong, N. Spatio-temporal vessel trajectory clustering based on data mapping and density. IEEE Access 2018, 6, 58939–58954. [Google Scholar] [CrossRef]
- Kombate, D. The Internet of Vehicles based on 5G communications. In Proceedings of the 2016 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Chengdu, China, 15–18 December 2016; pp. 445–448. [Google Scholar]
- Xia, F.; Hao, R.; Li, J.; Xiong, N.; Yang, L.T.; Zhang, Y. Adaptive GTS allocation in IEEE 802.15. 4 for real-time wireless sensor networks. J. Syst. Archit. 2013, 59, 1231–1242. [Google Scholar] [CrossRef]
- Yang, X.; Luo, S.; Gao, K.; Qiao, T.; Chen, X. Application of data science technologies in intelligent prediction of traffic congestion. J. Adv. Transp. 2019, 2019, 2915369. [Google Scholar] [CrossRef] [Green Version]
- Gao, K.; Han, F.; Dong, P.; Xiong, N.; Du, R. Connected vehicle as a mobile sensor for real time queue length at signalized intersections. Sensors 2019, 19, 2059. [Google Scholar] [CrossRef] [Green Version]
- Rui, L.; Zhang, Y.; Huang, H.; Qiu, X. A New Traffic Congestion Detection and Quantification Method Based on Comprehensive Fuzzy Assessment in VANET. KSII Trans. Internet Inf. Syst. 2018, 12, 41–60. [Google Scholar]
- Jiang, Y.; Tong, G.; Yin, H.; Xiong, N. A pedestrian detection method based on genetic algorithm for optimize XGBoost training parameters. IEEE Access 2019, 7, 118310–118321. [Google Scholar] [CrossRef]
- Diakoulaki, D.; Mavrotas, G.; Papayannakis, L. Determining objective weights in multiple criteria problems: The critic method. Comput. Oper. Res. 1995, 22, 763–770. [Google Scholar] [CrossRef]
- Lin, C.; He, Y.X.; Xiong, N. An energy-efficient dynamic power management in wireless sensor networks. In Proceedings of the 2006 Fifth International Symposium on Parallel and Distributed Computing, Timisoara, Romania, 6–9 July 2006; Volume 2006, pp. 148–154. [Google Scholar]
- Jia, D.; Chen, H.; Zheng, Z.; Watling, D.; Connors, R.; Gao, J.; Li, Y. An enhanced predictive cruise control system design with data-driven traffic prediction. IEEE Trans. Intell. Transp. Syst. 2021, 2021, 1–14. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Common Algorithms | Advantages | Disadvantages |
|---|---|---|---|
| Parameter-based prediction model. | Smooth forecasting; Kalman filter forecasting; Wavelet change method. | Simple model; Simple calculation. | Poor adaptability. |
| Non-parametric prediction model. | K-nearest neighbor; Decision tree. | Strong robustness; Anti-noise ability. | Unable to meet real-time traffic forecasts. |
| Predictive model based on knowledge mining. | Neural network; Fuzzy logic theory; Support vector machine; Deep learning. | Strong fitting ability; High prediction accuracy. | Complex calculations; Weak interpretability. |
| Combined prediction model. | Uses a combination of multiple algorithms. | Complementary advantages; High prediction accuracy. | Large number of calculations. |
| Indicator Name | Traffic Congestion Levels | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Unblocked | Generally Unblocked | Light Congestion | Moderate Congestion | Severe Congestion | |
| (km/h) | (45, ) | (35, 45] | (25, 35] | (15, 25] | [0, 15] |
| D (pcu/km) | (0, 10] | (10, 20] | (20, 30] | (30, 40] | (45, ) |
| S | (0, 0.4] | (0.4, 0.6] | (0.6, 0.8] | (0.8, 1] | (1, +) |
| Data | Prediction Algorithm | ARIMA | IA-LSSVM | ACES | DMMAES |
|---|---|---|---|---|---|
| Traffic volume | Average of absolute percentage error | 7.3% | 4.8% | 3.6% | 2.7% |
| Time consuming (s) | 0.83 | 38.15 | 0.32 | 0.62 | |
| Average speed | Average of absolute percentage error | 10.6% | 6.2% | 4.1% | 3.2% |
| Time consuming (s) | 0.81 | 36.26 | 0.26 | 0.51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Lian, M.; Lu, C.; Zhang, S.; Liu, R.; Xiong, N.N. TCSA: A Traffic Congestion Situation Assessment Scheme Based on Multi-Index Fuzzy Comprehensive Evaluation in 5G-IoV. Electronics 2022, 11, 1032. https://doi.org/10.3390/electronics11071032
Liu L, Lian M, Lu C, Zhang S, Liu R, Xiong NN. TCSA: A Traffic Congestion Situation Assessment Scheme Based on Multi-Index Fuzzy Comprehensive Evaluation in 5G-IoV. Electronics. 2022; 11(7):1032. https://doi.org/10.3390/electronics11071032
Chicago/Turabian StyleLiu, Li, Minjie Lian, Caiwu Lu, Sai Zhang, Ruimin Liu, and Neal N. Xiong. 2022. "TCSA: A Traffic Congestion Situation Assessment Scheme Based on Multi-Index Fuzzy Comprehensive Evaluation in 5G-IoV" Electronics 11, no. 7: 1032. https://doi.org/10.3390/electronics11071032
APA StyleLiu, L., Lian, M., Lu, C., Zhang, S., Liu, R., & Xiong, N. N. (2022). TCSA: A Traffic Congestion Situation Assessment Scheme Based on Multi-Index Fuzzy Comprehensive Evaluation in 5G-IoV. Electronics, 11(7), 1032. https://doi.org/10.3390/electronics11071032