
A High-Robust Sensor Activity Control Algorithm for Wireless Sensor Networks


Abstract
:1. Introduction
1.1. Background
1.2. Contributions
- (1)
- This paper proposes a sensor control algorithm with fast convergence. According to the application requirements, an algorithm that can provide fast convergence can avoid the waste of sensor power resources. SACA also uses random access technology, such that the sleep sensors do not need to receive the feedback packet from the base station and can truly achieve the purpose of dormancy and power saving. In the Gur Game algorithm, all sensors must receive feedback packets from the base station to switch their states.
- (2)
- The SACA algorithm is highly scalable and can be used in large-scale network environments. The sensor network is often composed of hundreds or thousands of sensor nodes. In the Gur Game, when the ratio of the target value to the total number of sensors is too large or too small, the number of active sensors cannot reach the target value.
- (3)
- SACA has a strong self-organization ability algorithm and can be applied in severe network environments, such as a network environment with a high death ratio (high damage ratio). Because sensors are usually deployed in dangerous areas, it is not possible to repair or add new sensors. Therefore, an algorithm with strong self-organization capabilities can enable sensors to operate in a severe network environment in real time, self-adjust, or maintain a specific target value.
2. QoS Control Algorithms
2.1. Gur Game
2.2. ACK Algorithm
2.3. Related Works
3. Preliminaries
3.1. Sensor Activity Control Algorithm
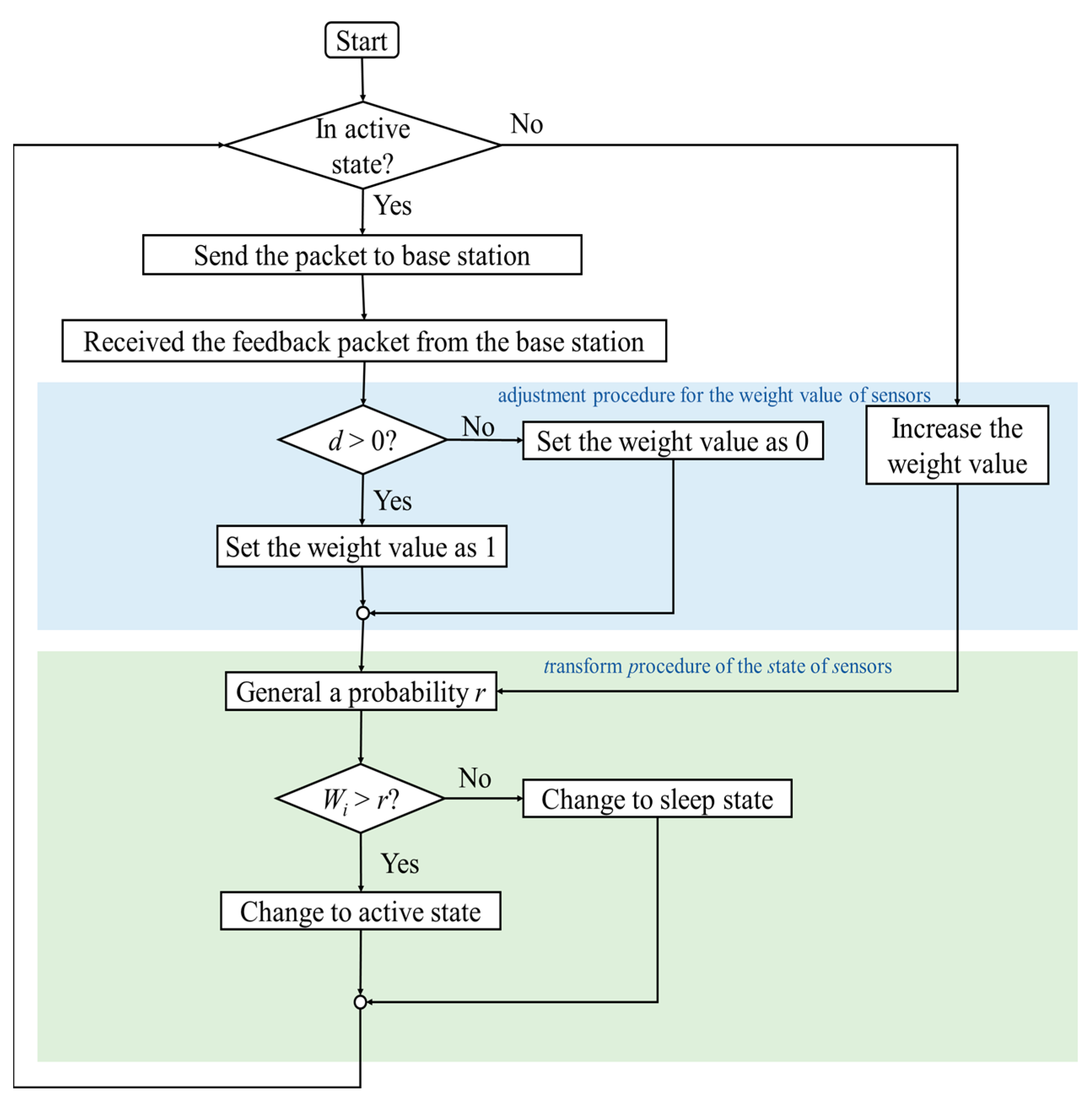
3.2. Operation Process of SACA
4. Methods
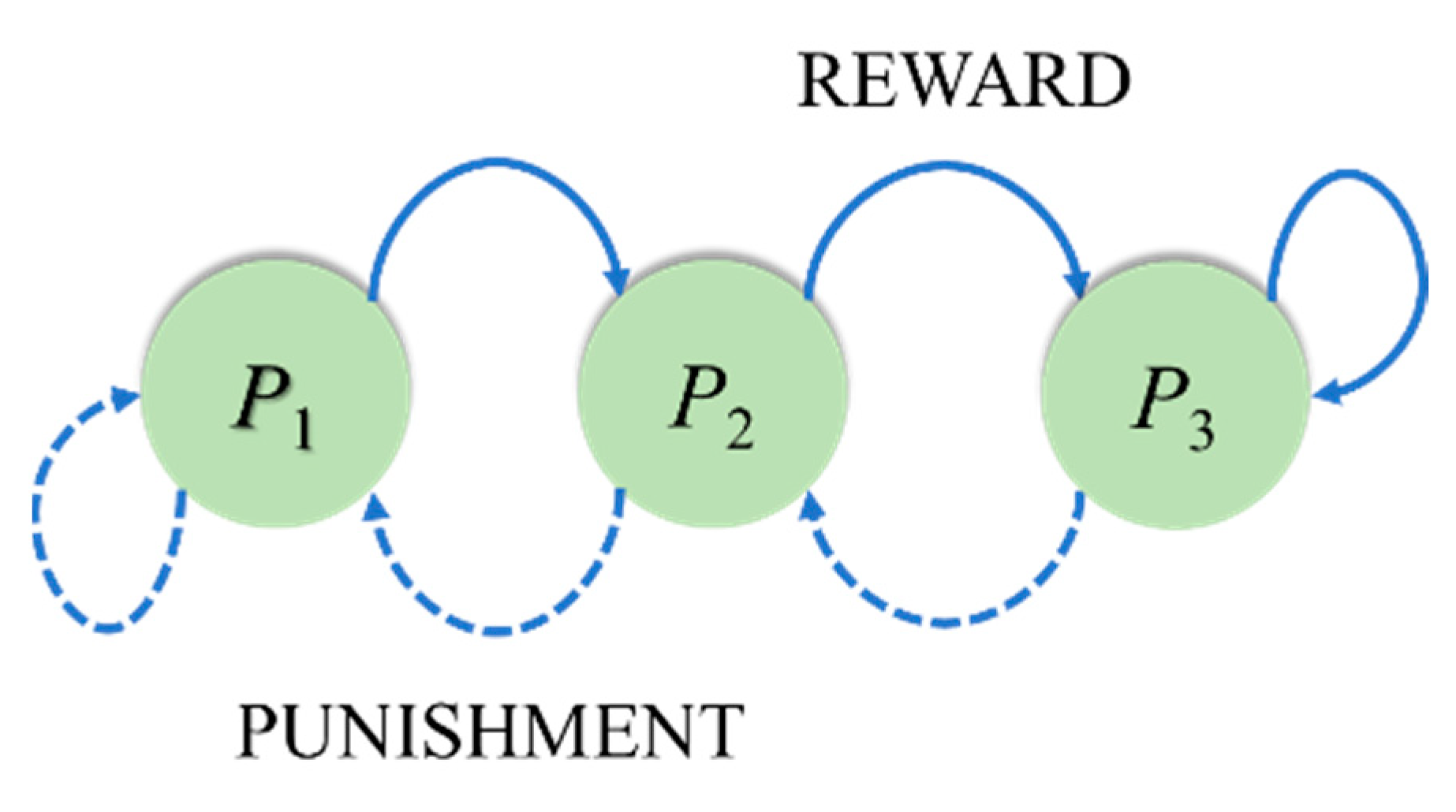
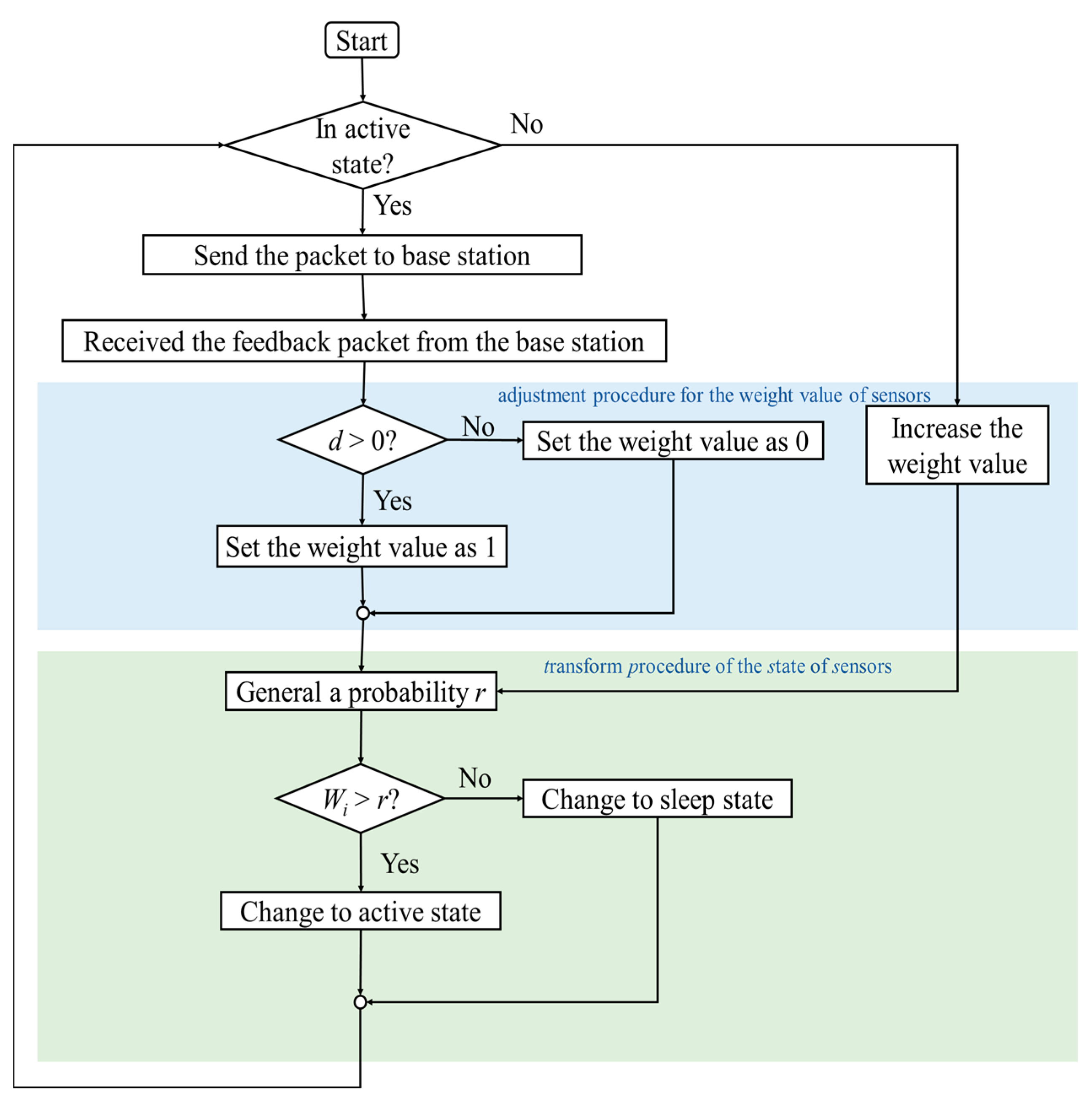
4.1. Adjustment Procedure for the Weight Value of Sensors
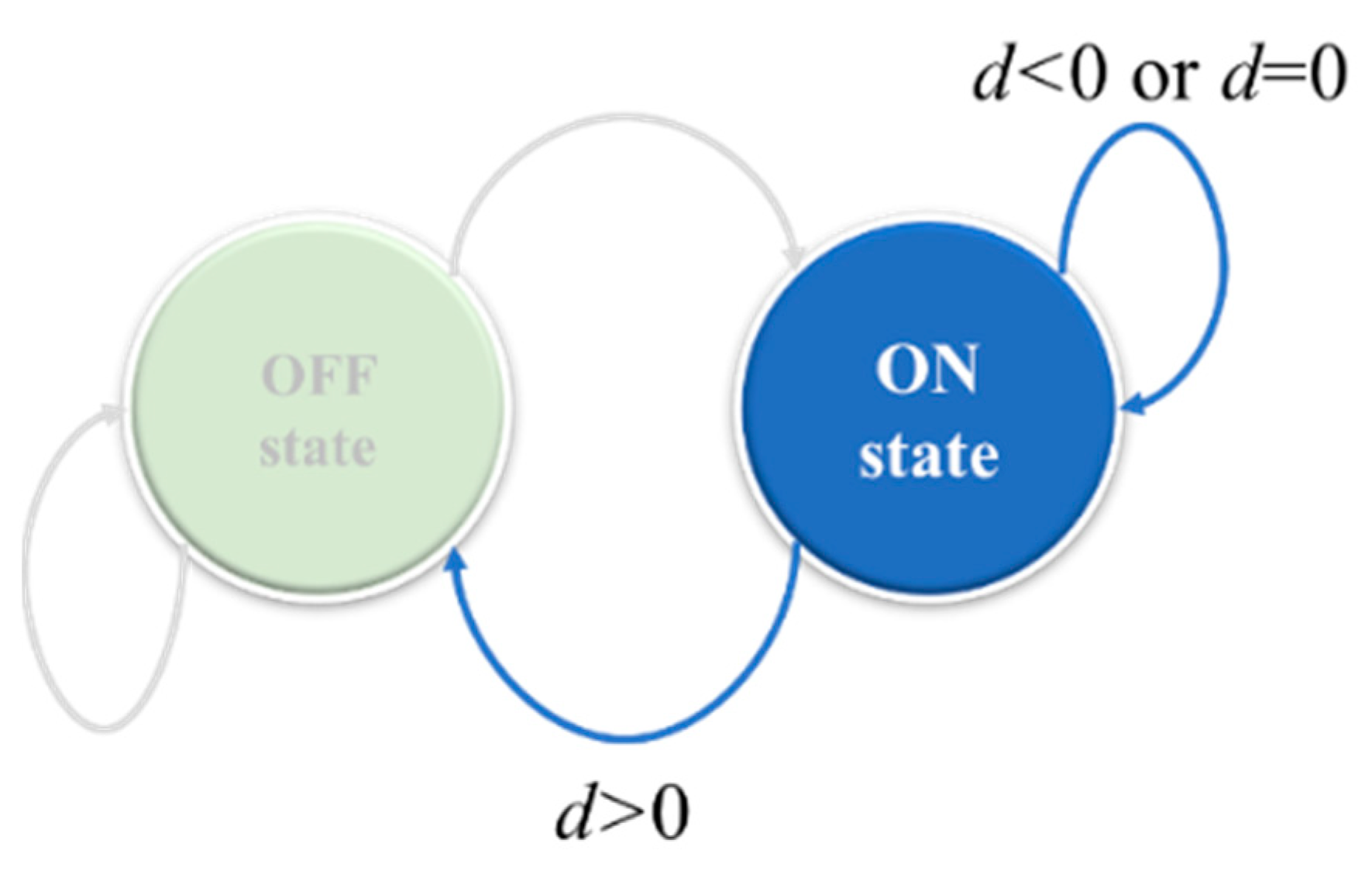
- (1)
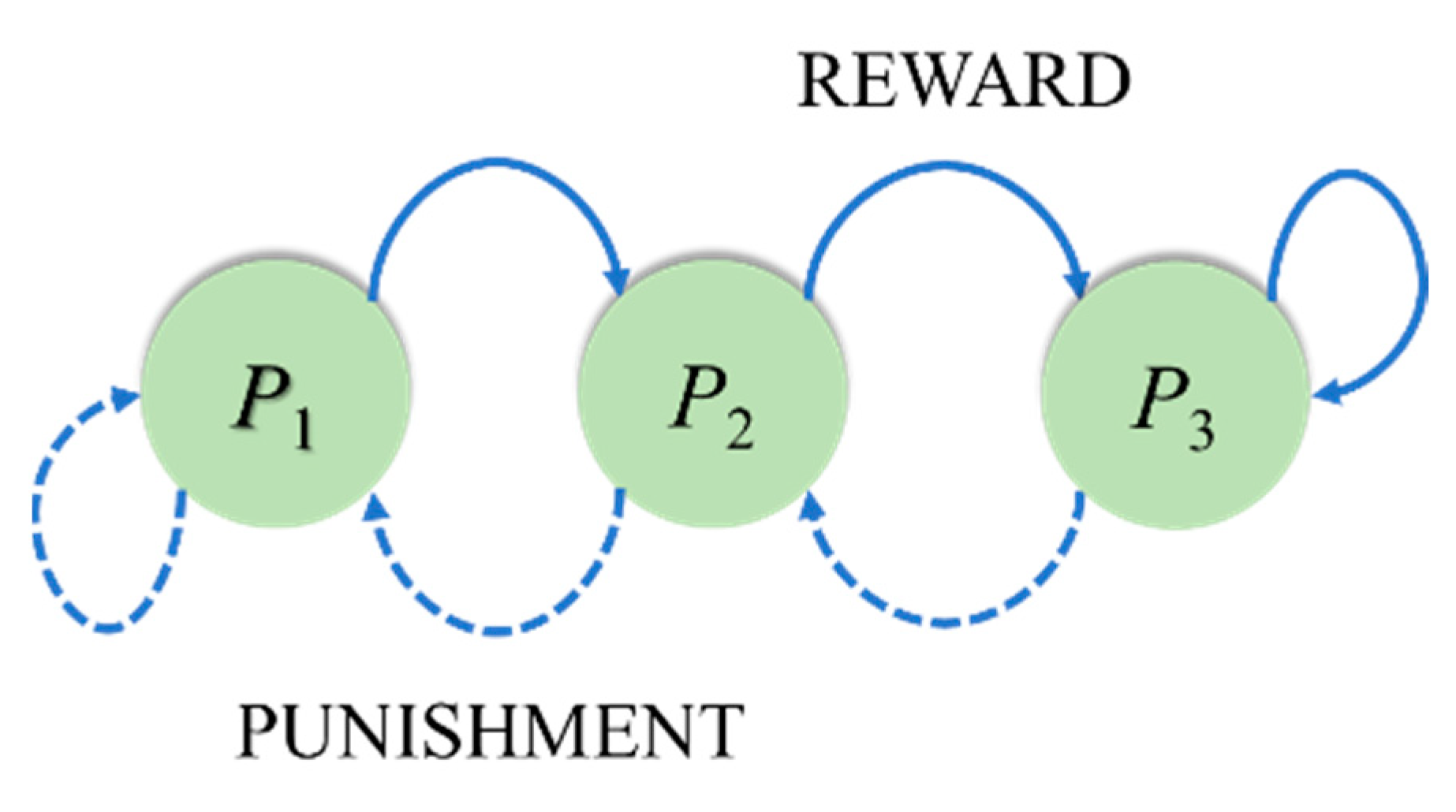
- When d > 0, there are too many sensors in the active state. Because the sensor node is currently in an active state, the sensor should change to a sleep state in the next round.
- (2)
- At d < 0, the total number of active sensors is currently insufficient. If the sensor is currently in an active state, it should be maintained in an active state in the next round.
- (3)
- When d = 0, the total number of active sensors reaches the target value. Therefore, the state of the sensor does not need to be changed. These situations are shown in Figure 6.
4.2. Transform Procedure of the State of Sensors
- (1)
- When r greater than or equal Wi, the sensor either remains in the sleep state or transitions from the active to the sleep state.
- (2)
- When r is less than Wi, the sensor remains active or transitions from the sleep to active state. In other words, a sensor node with a higher weight value, Wi, will have a higher probability of being in the active state.
5. Evaluations and Results
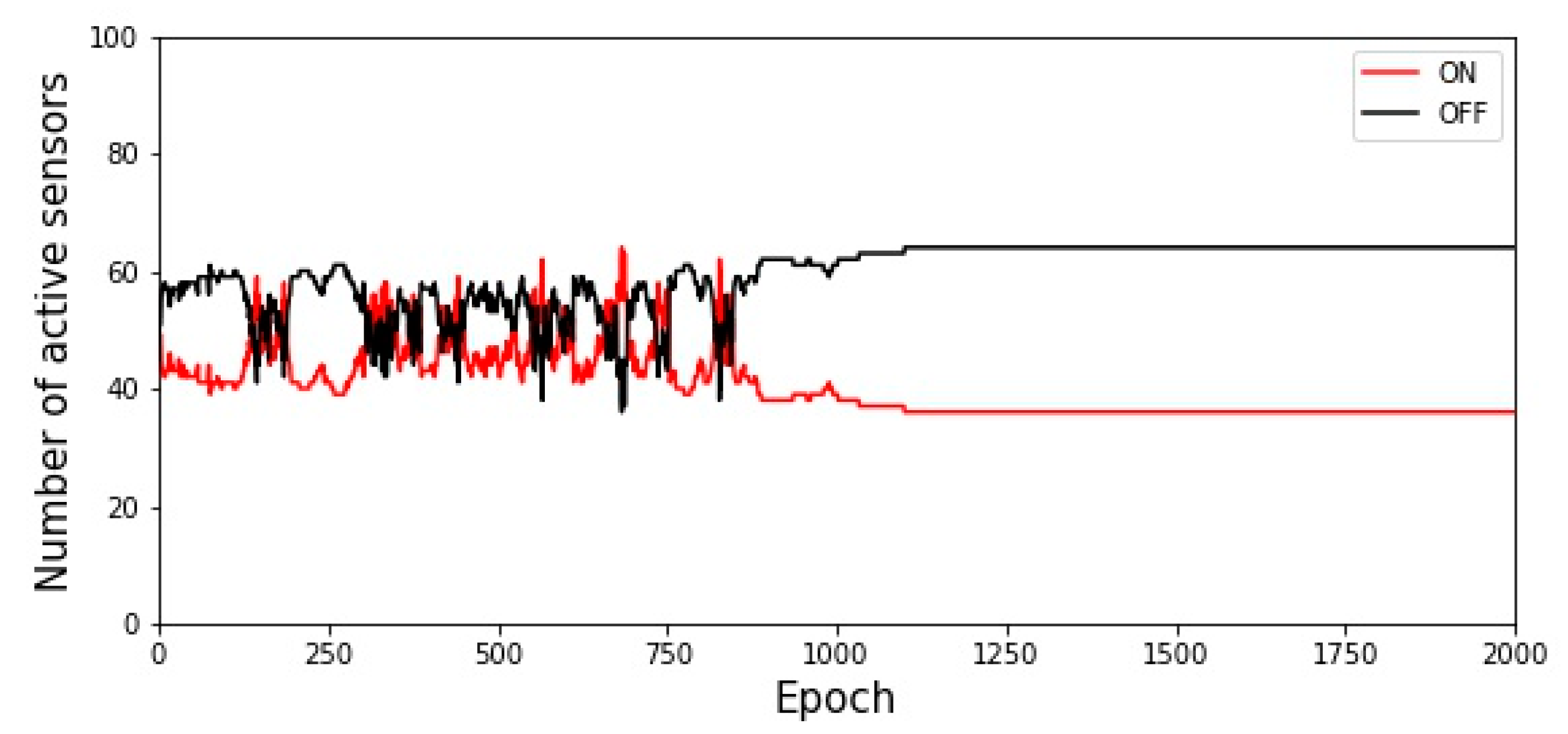
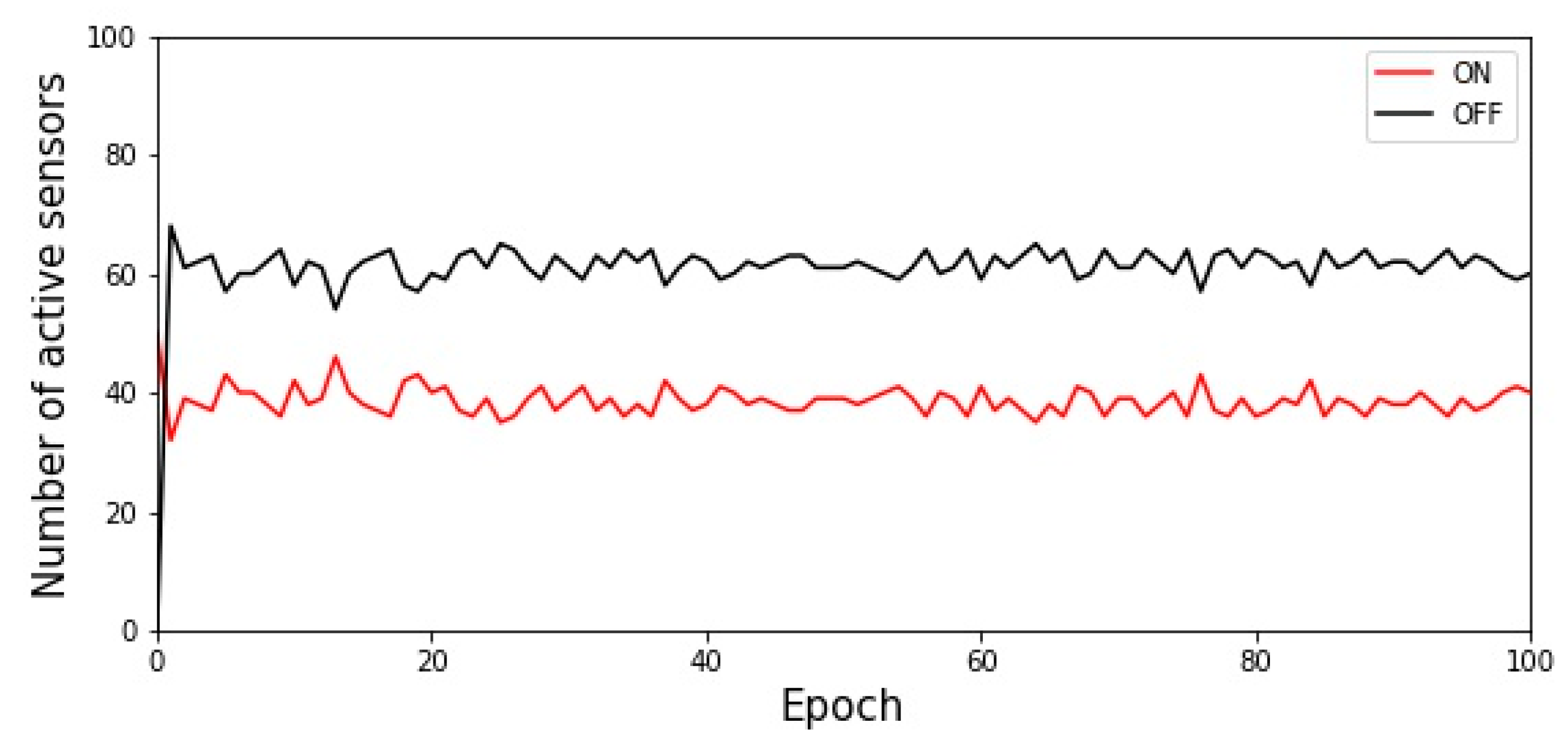
5.1. Performance Evaluation
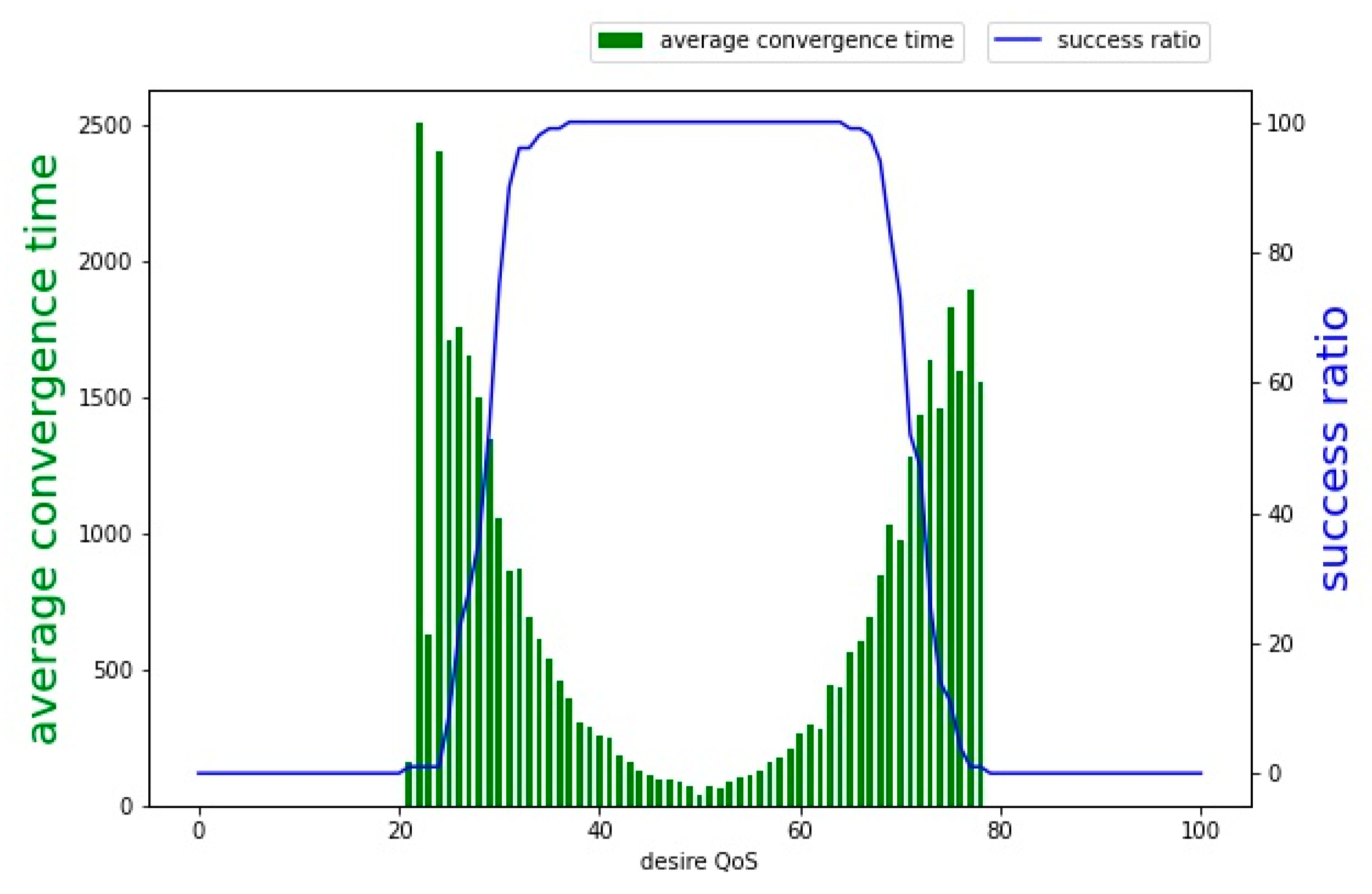
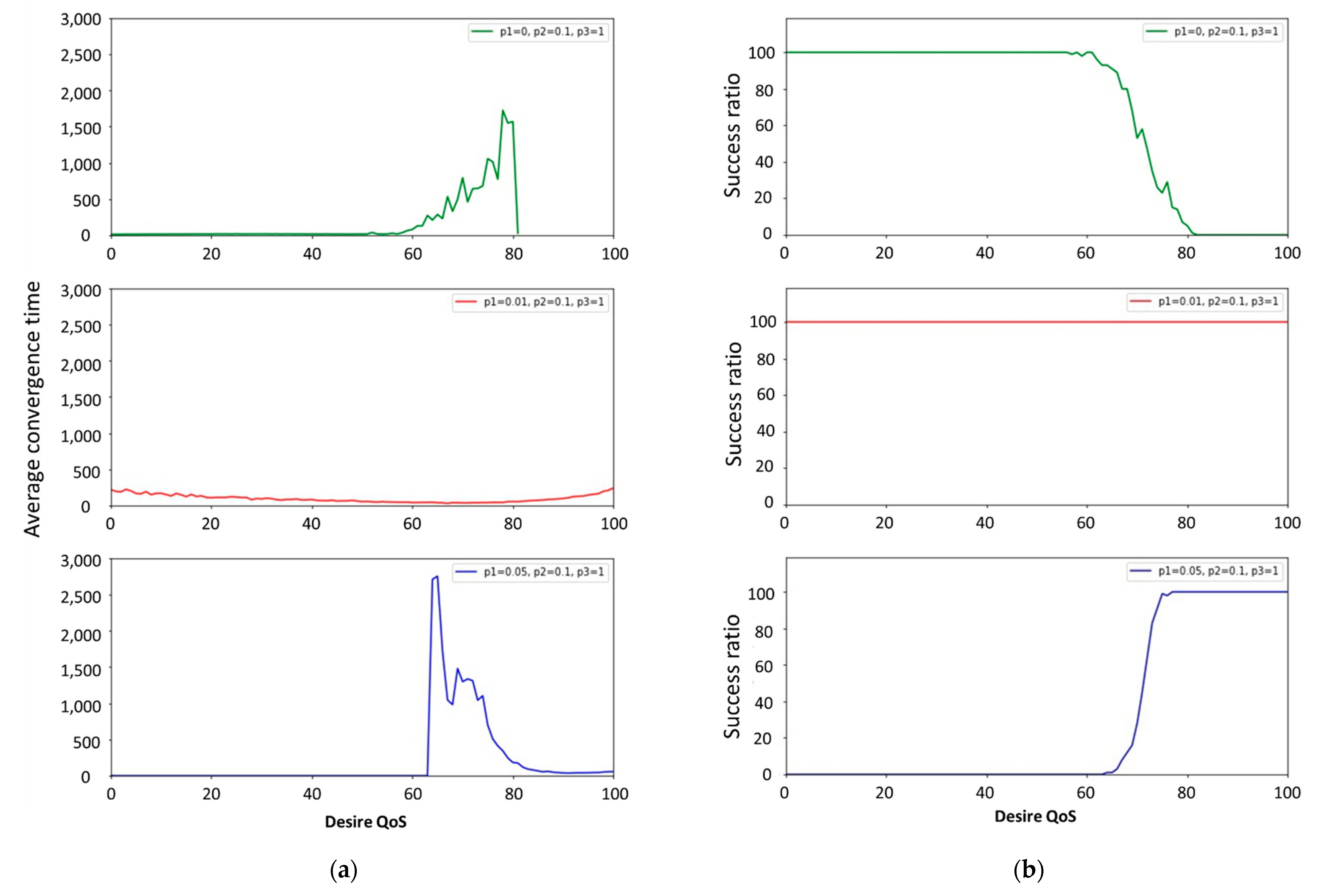
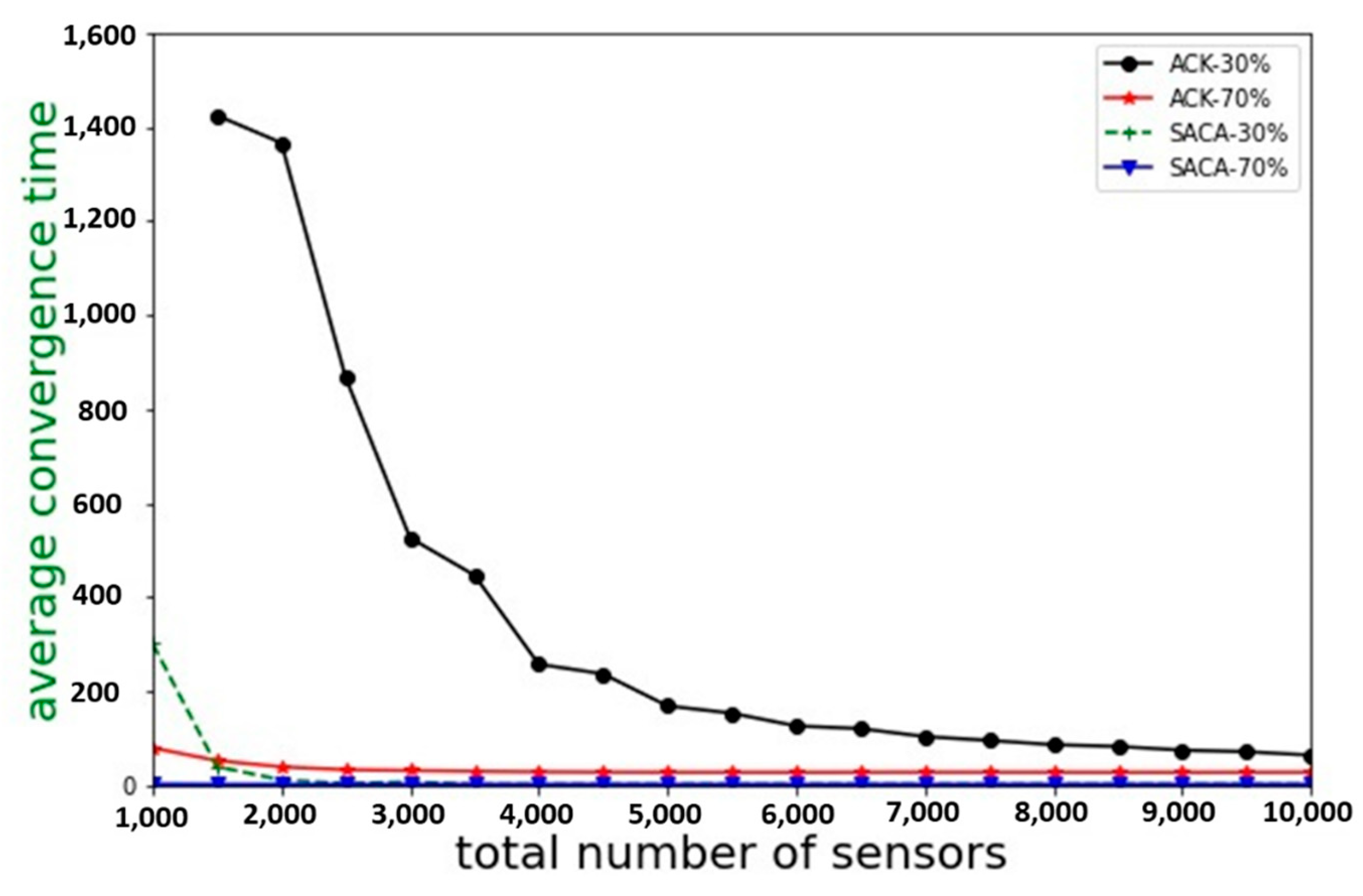
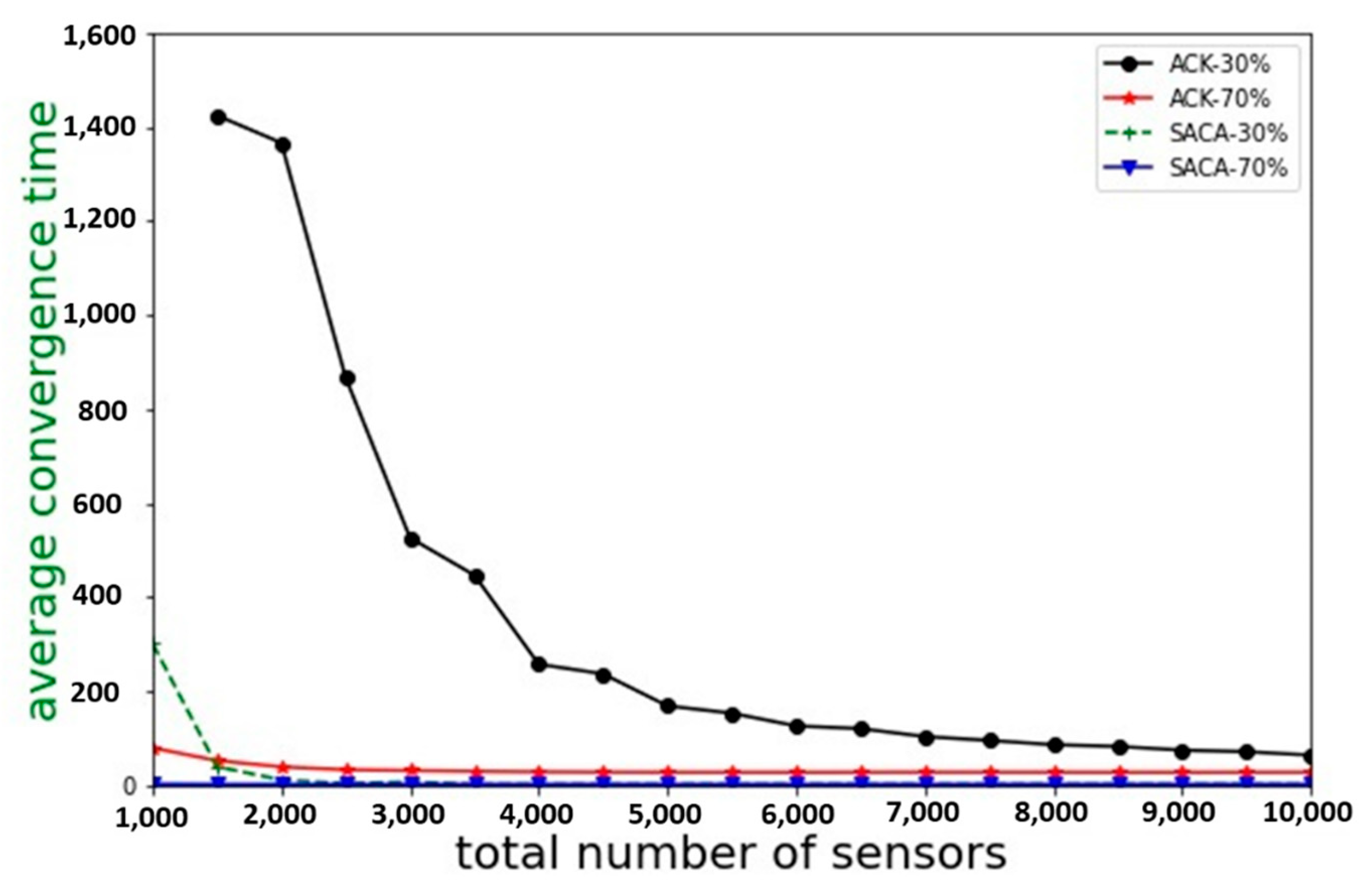
5.2. Convergence Time and Successful Ratio Analysis
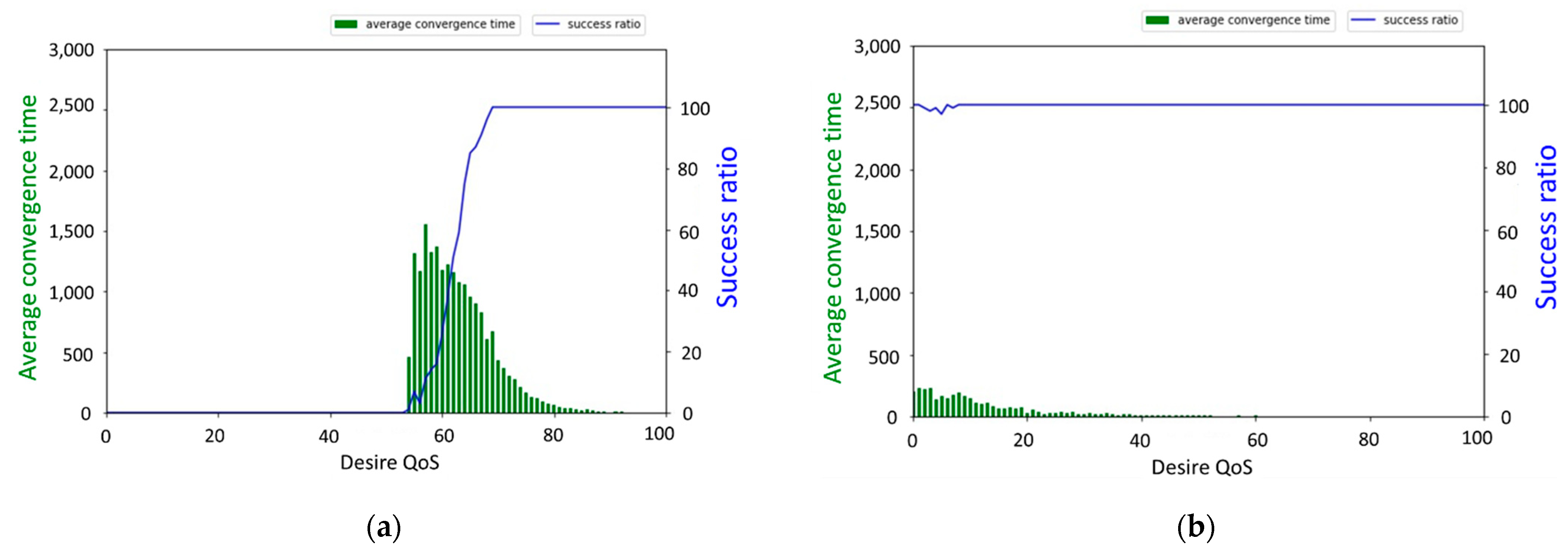
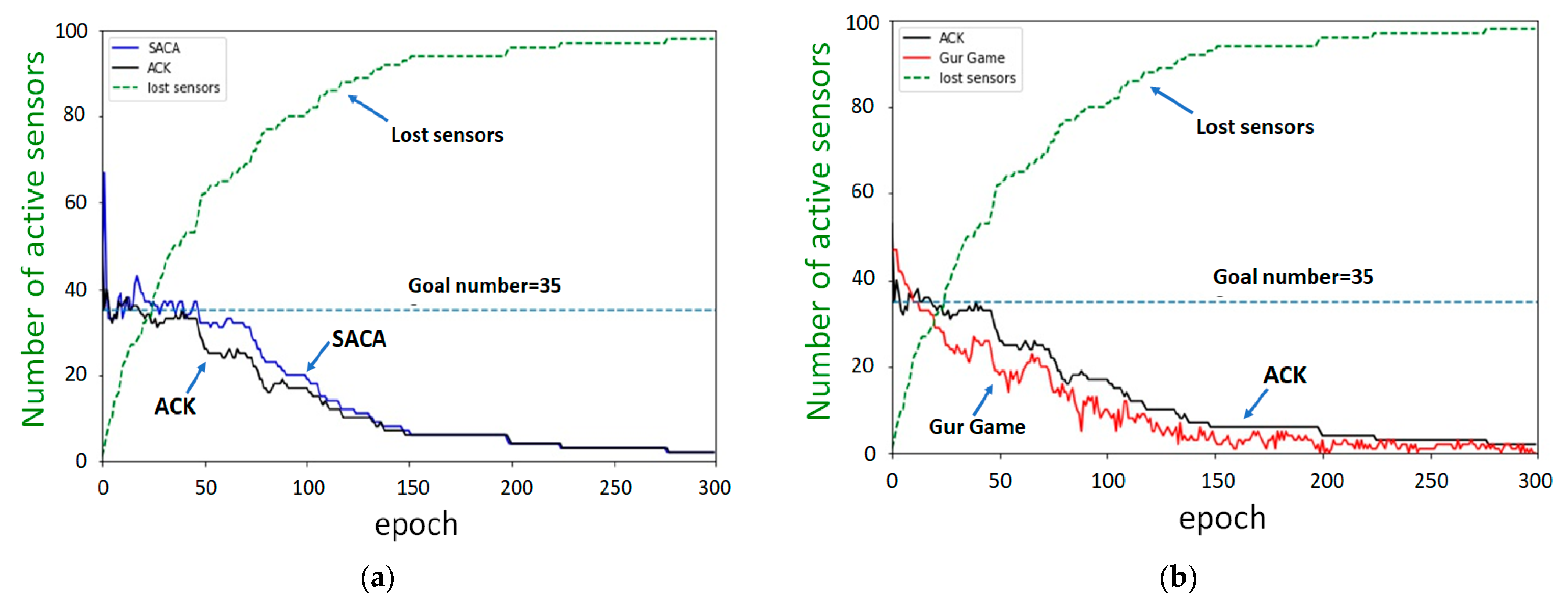
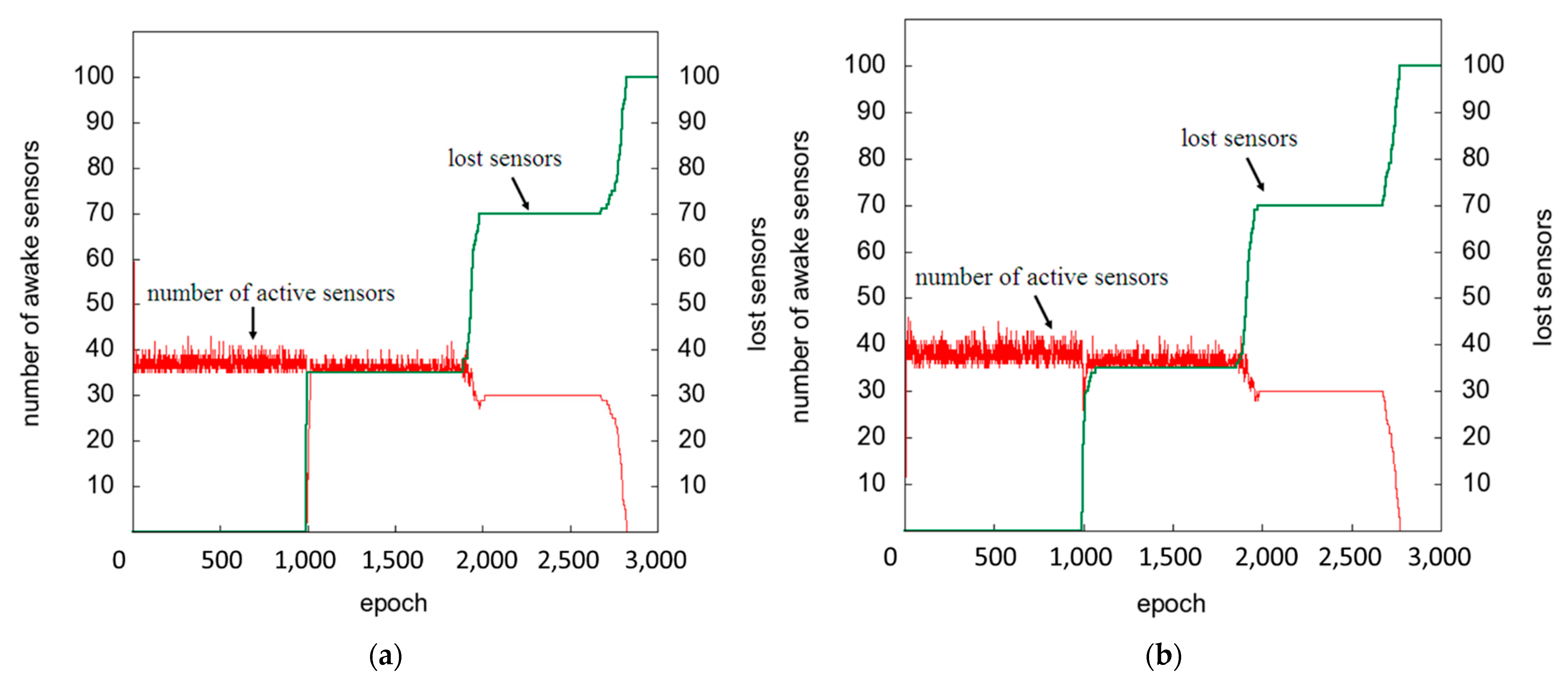
5.3. Self-Organization Ability Analysis with High Death Ratio
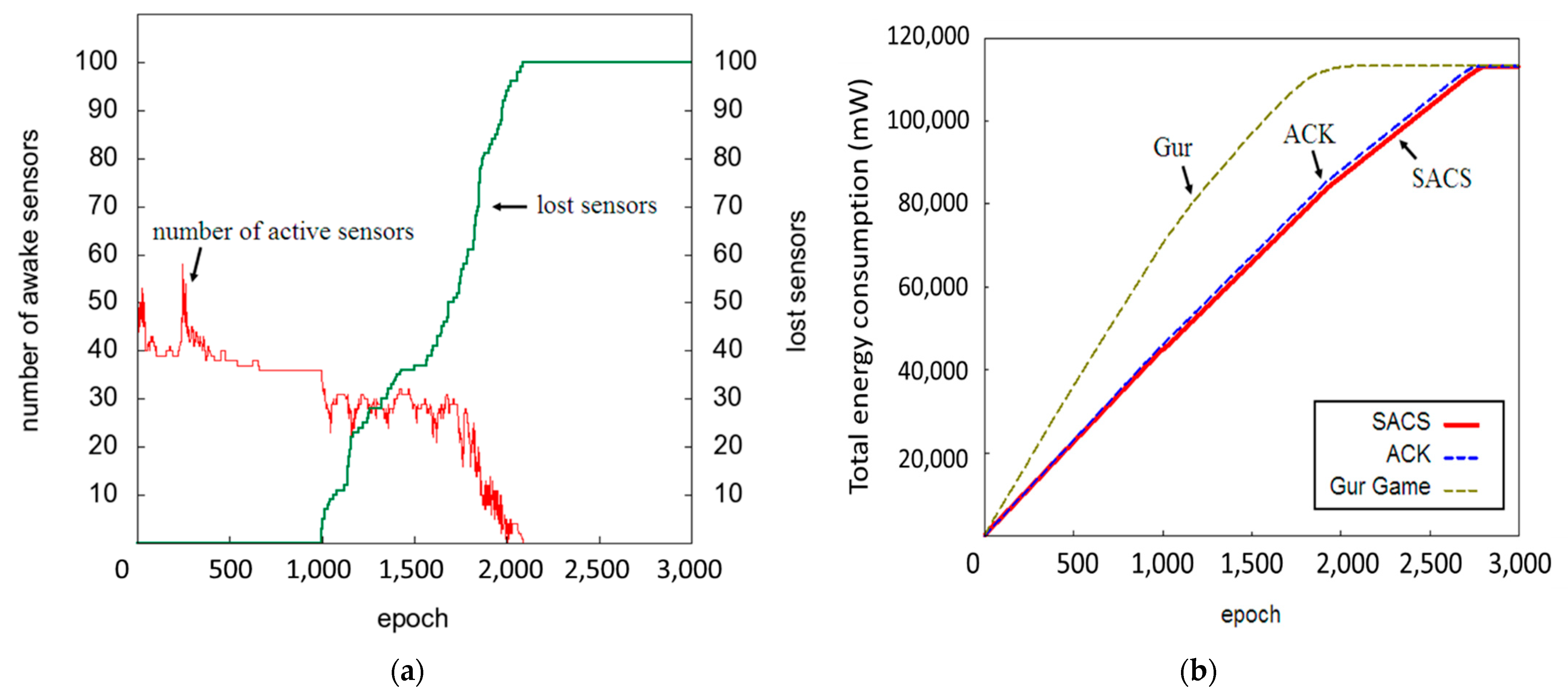
5.4. Energy-Efficiency Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless Sensor Networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef] [Green Version]
- Dubey, R.; Choubey, R.; Dubey, A. Challenges for Quality of Service (QoS) in Wireless Sensor Networks. Int. J. Eng. Sci. Technol. 2010, 2, 7395–7400. [Google Scholar]
- Bhuyan, B.; Sarma, H.K.D.; Sarma, N.; Kar, A.; Mall, R. Quality of Service (QoS) Provisions in Wireless Sensor Networks and Related Challenges. Wirel. Sens. Netw. 2010, 2, 861–868. [Google Scholar] [CrossRef] [Green Version]
- Shi, H.-Y.; Wang, W.-L.; Kwok, N.-M.; Chen, S.-Y. Game Theory for Wireless Sensor Networks: A Survey. Sensors 2012, 12, 9055–9097. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Iyer, R.; Kleinrock, L. QoS Control for Sensor Networks. In Proceedings of the IEEE International Conference on Communications, 2003, ICC ‘03, Anchorage, AK, USA, 11–15 May 2003; Volume 1, pp. 517–521. [Google Scholar]
- Frolik, J. QoS control for random access wireless sensor networks. In Proceedings of the 2004 IEEE Wireless Communications and Networking Conference (IEEE Cat. No.04TH8733), Atlanta, GA, USA, 21–25 March 2004; Volume 3, pp. 359–368. [Google Scholar] [CrossRef]
- Kay, J.; Frolik, J. Quality of service analysis and control for wireless sensor networks. In Proceedings of the 2004 IEEE International Conference on Mobile Ad-hoc and Sensor Systems (IEEE Cat. No.04EX975), Fort Lauderdale, FL, USA, 25–27 October 2004; pp. 359–368. [Google Scholar] [CrossRef]
- Liang, B.; Frolik, J.; Wang, X.S. A predictive QoS control strategy for wireless sensor networks. In Proceedings of the IEEE International Conference on Mobile Adhoc and Sensor Systems Conference, 2005, Washington, DC, USA, 7 November 2005; Volume 8, p. 282. [Google Scholar] [CrossRef]
- Kay, J.M.; Frolik, J. An Expedient Wireless Sensor Automaton with System Scalability and Efficiency Benefits. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2008, 38, 1198–1209. [Google Scholar] [CrossRef]
- Liang, B.; Frolik, J.; Wang, X.S. Energy-Efficient Dynamic Spatial Resolution Control for Wireless Sensor Clusters. Int. J. Distrib. Sens. Netw. 2009, 5, 361–389. [Google Scholar] [CrossRef] [Green Version]
- Nobre, P.; Grilo, A. A Gur Game Approach to Anonymous Sensor Sharing in Community Ad Hoc Networks. Available online: https://modelzoo.co/model/objectdetection (accessed on 25 February 2022).
- Wang, H.-L.; Tsai, R.-G. Application of Periodical Shuffle in Controlling Quality of Service in Wireless Sensor Networks. Int. J. Adhoc. Sens. Ubiquitous Comput. 2013, 4, 17–30. [Google Scholar] [CrossRef] [Green Version]
- Elshahed, E.M.; Ramadan, R.A.; Al-tabbakh, S.M.; El-zahed, H. Modified gur game for WSNs QoS control. International Workshop on Wireless Networks and Energy Saving Techniques (WNTEST-2014). Proc. Comput. Sci. 2014, 32, 1168–1173. [Google Scholar] [CrossRef] [Green Version]
- Semprebom, T.; Montez, C.; de Araujo, G.M.; Portugal, P. Skip game: An autonomic approach for QoS and energy management in IEEE 802.15.4 WSN. In Proceedings of the IEEE Symposium on Computers and Communication (ISCC), Larnaca, Cyprus, 6–9 July 2015; pp. 1–6. [Google Scholar]
- Ayers, M.; Liang, Y. Gureen Game: An energy-efficient QoS control scheme for wireless sensor networks. In Proceedings of the Green Computing Conference and Workshops, Orlando, FL, USA, 25–28 July 2011. [Google Scholar]
- Zhao, L.; Xu, C.; Xu, Y.; Li, X. Energy-Aware Wireless Microsensor Networks QoS Control for Wireless Sensor Network. In Proceedings of the IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 24–26 May 2006. [Google Scholar]
- Raghunathan, V.; Schurgers, C.; Park, S.; Srivastava, M. Energy-aware wireless microsensor networks. IEEE Signal Process. Mag. 2002, 19, 40–50. [Google Scholar] [CrossRef]
- Sagar, A.K.; Banda, L.; Sahana, S.; Singh, K.; Singh, B.K. Optimizing quality of service for sensor enabled Internet of healthcare systems. Neurosci. Inform. 2021, 1, 3. [Google Scholar] [CrossRef]
- Nayer, S.I.; Ali, H. Dynamic Energy-Aware Algorithm for Self-Optimizing Wireless Sensor Networks. In Proceedings of the 2008 3rd International Workshop on Self-Organizing Systems, Vienna, Austria, 10–12 December 2018. [Google Scholar]
- Spitler, S.L.; Lee, D.C. Integration of Explicit Effective-Bandwidth-Based QoS Routing with Best-Effort Routing. IEEE/ACM Trans. Netw. 2008, 16, 957–969. [Google Scholar] [CrossRef]
- Varyani, N.; Zhang, Z.-L.; Dai, D. QROUTE: An Efficient Quality of Service (QoS) Routing Scheme for Software-Defined Overlay Networks. IEEE Access 2020, 8, 104109–104126. [Google Scholar] [CrossRef]
- Nelakuditi, S.; Varadarajan, S.; Zhang, Z.-L. On localized control in QoS routing. IEEE Trans. Autom. Control. 2002, 47, 6. [Google Scholar] [CrossRef]
- Lin, S.-C.; Chen, K.-C. Statistical QoS Control of Network Coded Multipath Routing in Large Cognitive Machine-to-Machine Networks. IEEE Int. Things J. 2015, 3, 619–627. [Google Scholar] [CrossRef]
- Kaur, T.; Kumar, D. A survey on QoS mechanisms in WSN for computational intelligence based routing protocols. Wirel. Netw. 2019, 26, 2465–2486. [Google Scholar] [CrossRef]
- Sankaran, K.S.; Gao, X.-Z.; Devabalaji, K.; Roopa, Y.M. Energy based random repeat trust computation approach and Reliable Fuzzy and Heuristic Ant Colony mechanism for improving QoS in WSN. Energy Rep. 2021, 7, 7967–7976. [Google Scholar] [CrossRef]
- Cedeño, N.Z.; Orlando, P.A.; Estupiñan, C.E. The performance of QoS in wireless sensor networks. In Proceedings of the Iberian Conference on Information Systems and Technologies (CISTI), Coimbra, Portugal, 19–22 June 2019. [Google Scholar]
- Wesam, A.; Mohammad, Q.; Orieb, A.A. Virtual Node Schedule for Supporting QoS in Wireless Sensor Network. In Proceedings of the IEEE Jordan International Joint Conference on Electrical Engineering and Information Technology (JEEIT), Amman, Jordan, 9–11 April 2019. [Google Scholar]
- Wang, H.-L.; Huang, W.-L. QC2: A QoS Control Scheme with Quick Convergence in Wireless Sensor Networks. ISRN Sens. Netw. 2013, 2013, 185719. [Google Scholar] [CrossRef]
- Tsai, R.-G.; Shie, G.-R.; Tsai, P.-H. Sensor activity control algorithm for Random Access Wireless Sensor Network Systems. In Proceedings of the International Computer Symposium (ICS), Tainan, Taiwan, 17–19 December 2020. [Google Scholar]
- Wang, H.-L.; Tsai, R.-G.; Li, L.-S. An Enhanced Scheme in Controlling Both Coverage and Quality of Service in Wireless Sensor Networks. Int. J. Smart Sens. Intell. Syst. 2013, 6, 772–790. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Mu, C. A Kind of Application-Specific QoS Control in Wireless Sensor Networks. In Proceedings of the IEEE International Conference on Information Acquisition (ICIA), Weihai, China, 20–23 August 2006; pp. 456–461. [Google Scholar]
- Zhou, J.; Mu, C. Density Dominion of QoS Control with Localized Information in Wireless Sensor Networks. In Proceedings of the International Conference on ITS Telecommunications Proceedings, Chengdu, China, 21–23 June 2006; pp. 917–920. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Parameter |
|---|---|
| Total number of sensors, m | 102, 103–104 |
| Number of the sink | 1 |
| Target value, Q0 | 0–100 0.3, 0.7 (Q0/m) |
| Adjustment parameter, Δτ | 1 |
| Activation parameter, σ | 0.001, 0.0001 |
| Number of experiments | 100 |
| Execute rounds for each set of experiment | 3000 |
| State Mode | MCU Mode | Sensor Mode | Radio Mode | Power (mW) |
|---|---|---|---|---|
| Transmission | Active | Active | Tx, Rx | 1139.4 |
| Receive | Active | OFF | Rx | 409 |
| Idle | OFF | OFF | OFF | 40.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, R.-G.; Lv, X.; Shen, L.; Tsai, P.-H. A High-Robust Sensor Activity Control Algorithm for Wireless Sensor Networks. Sensors 2022, 22, 2020. https://doi.org/10.3390/s22052020
Tsai R-G, Lv X, Shen L, Tsai P-H. A High-Robust Sensor Activity Control Algorithm for Wireless Sensor Networks. Sensors. 2022; 22(5):2020. https://doi.org/10.3390/s22052020
Chicago/Turabian StyleTsai, Rong-Guei, Xiaoyan Lv, Lin Shen, and Pei-Hsuan Tsai. 2022. "A High-Robust Sensor Activity Control Algorithm for Wireless Sensor Networks" Sensors 22, no. 5: 2020. https://doi.org/10.3390/s22052020
APA StyleTsai, R.-G., Lv, X., Shen, L., & Tsai, P.-H. (2022). A High-Robust Sensor Activity Control Algorithm for Wireless Sensor Networks. Sensors, 22(5), 2020. https://doi.org/10.3390/s22052020