
Applying Machine Learning and Time-Series Analysis on Sentinel-1A SAR/InSAR for Characterizing Arctic Tundra Hydro-Ecological Conditions



Abstract
:1. Introduction
- To analyze the temporal signatures of intensity and coherence measurements from Sentinel-1A C-band SAR data in relation to environmental conditions, thus providing insight on their utility for landcover characterization;
- To develop a machine learning methodology capable of identifying the hydro-ecological state (e.g., wet or dry, and general vegetation structure) of Arctic tundra landcovers using a time series of SAR/InSAR data and terrain metrics;
- To provide recommendations on the efficacy of each input data source for the development of baseline landcover data.
2. Materials and Methods
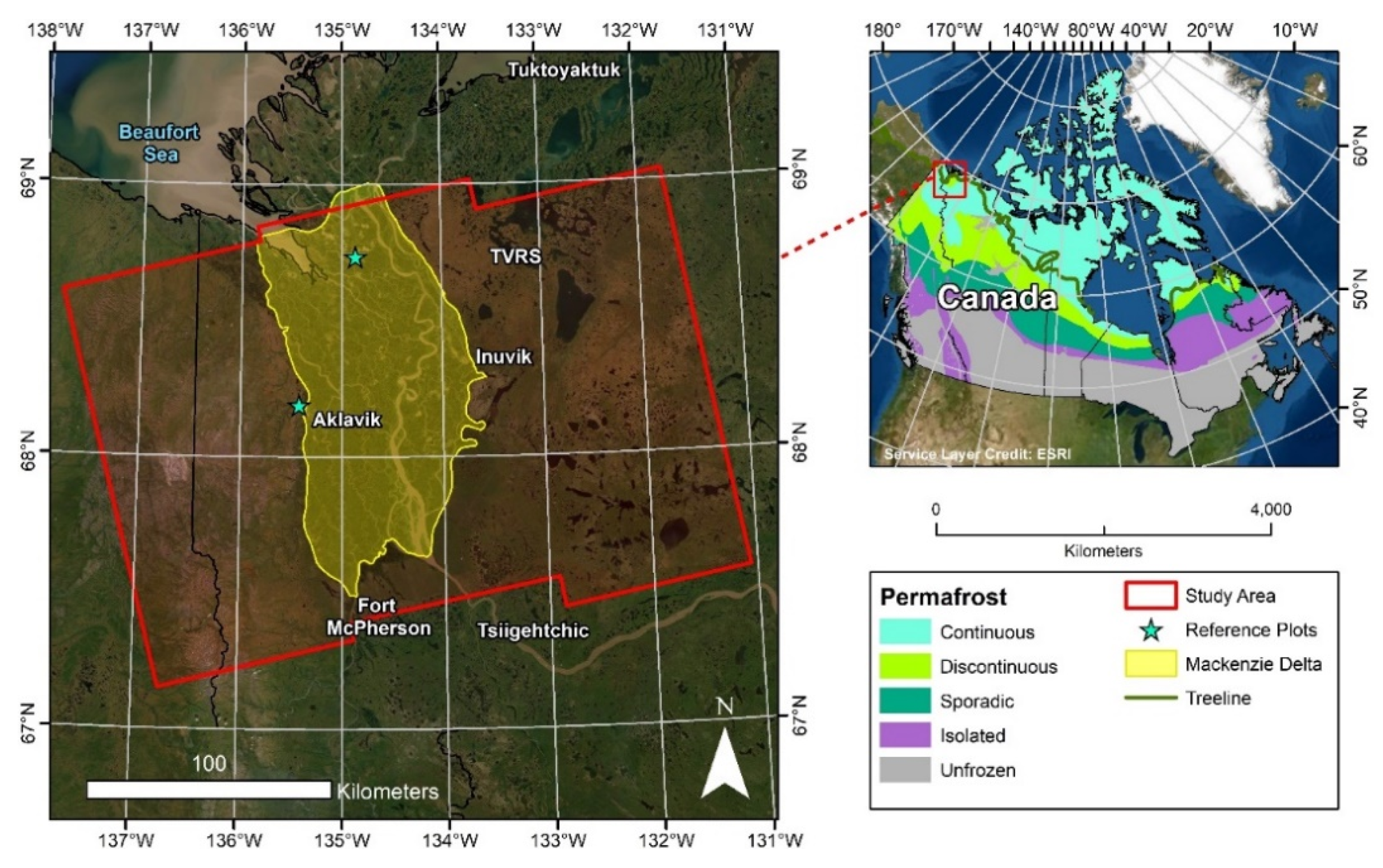
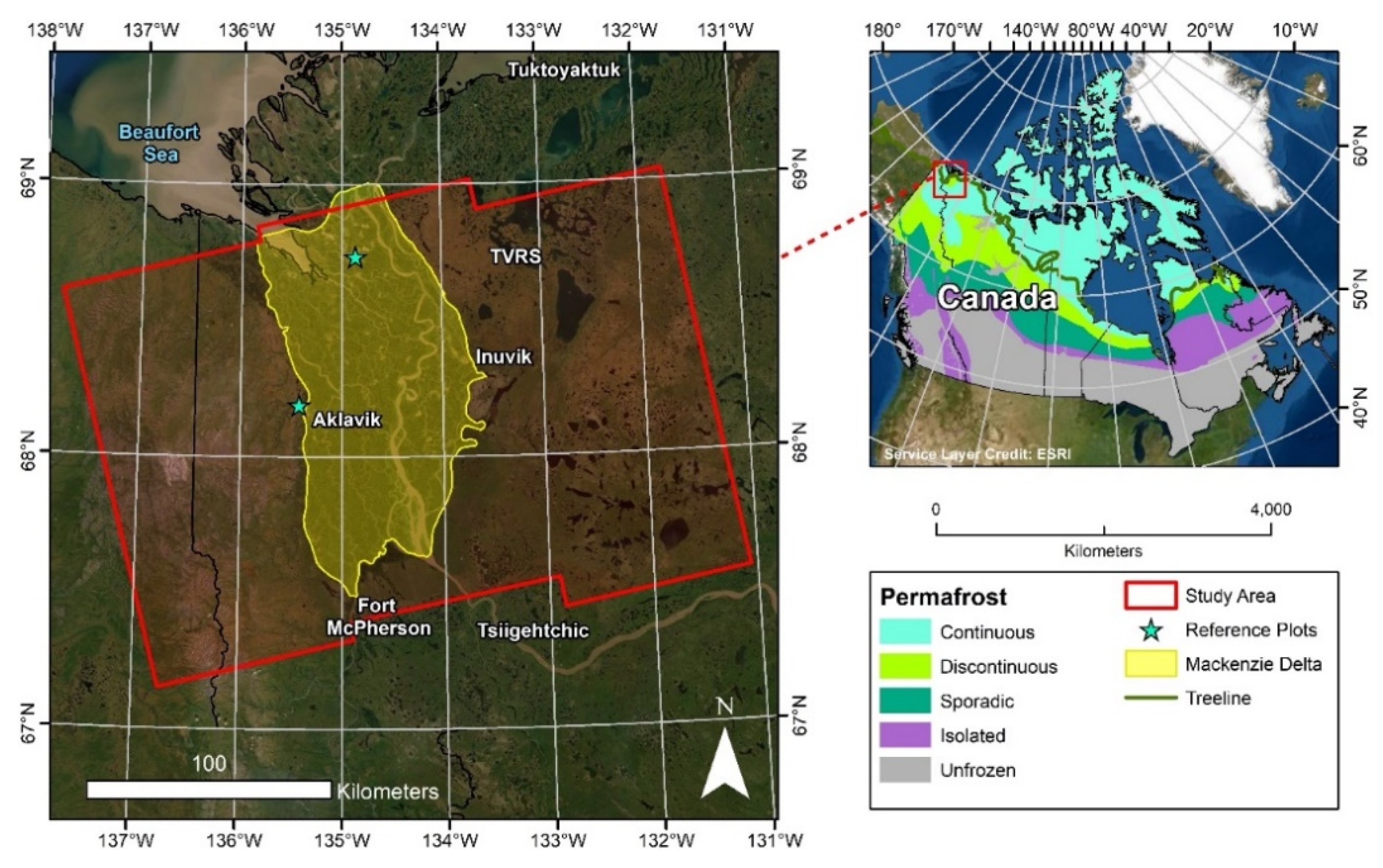
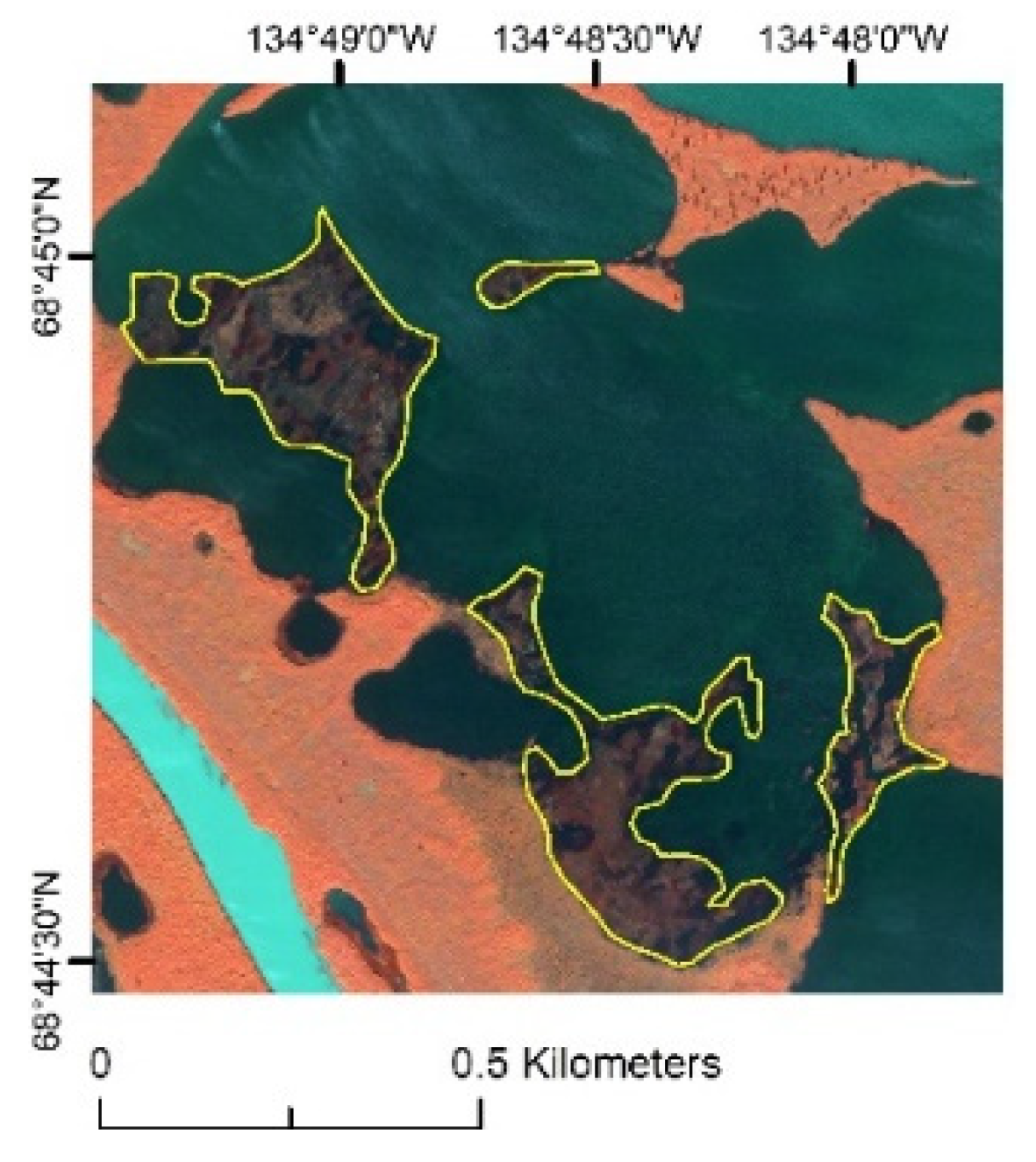
2.1. Study Area
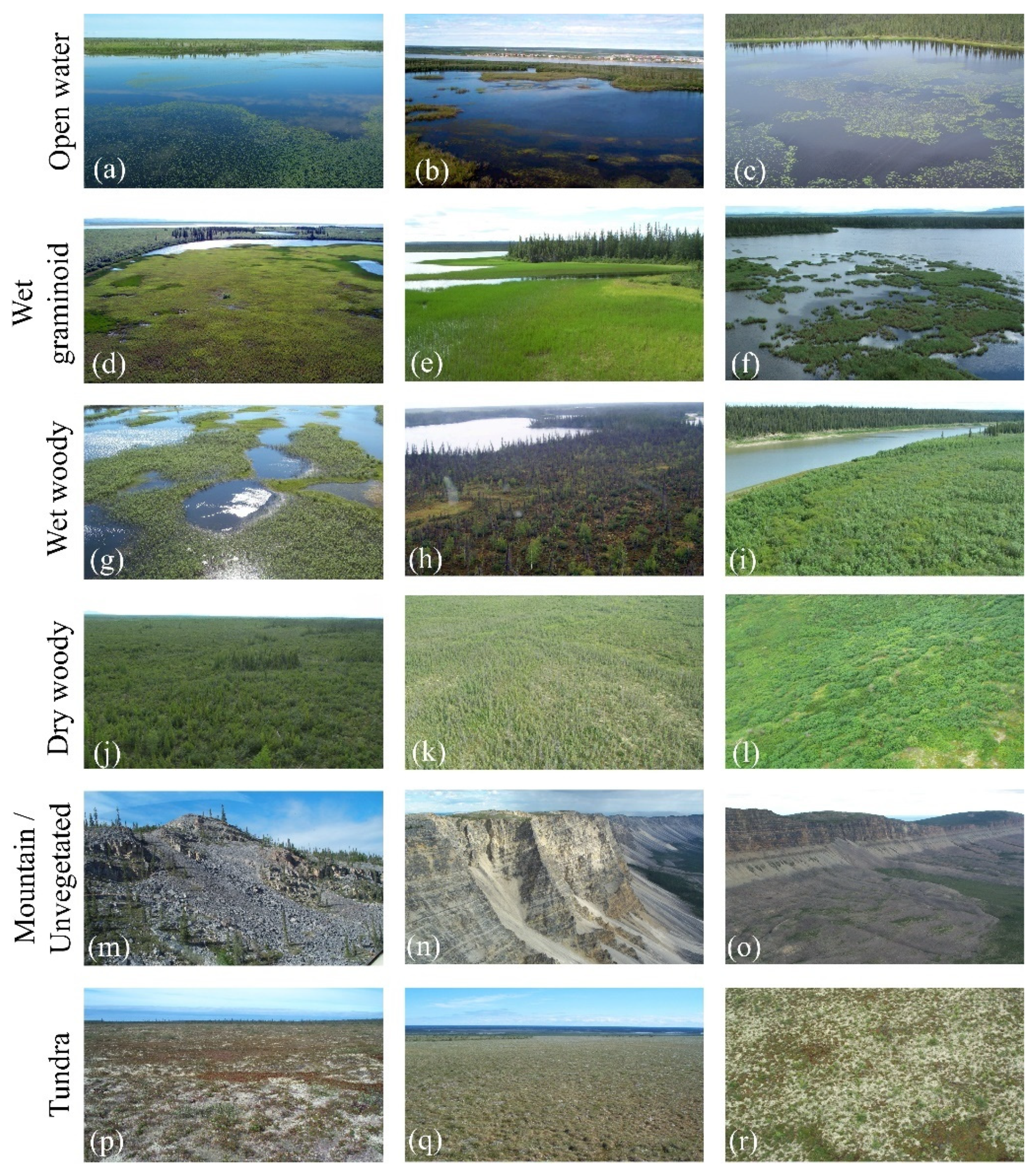
2.2. Vegetation of the Mackenzie Delta and Hydro-Ecological Classes of Interest
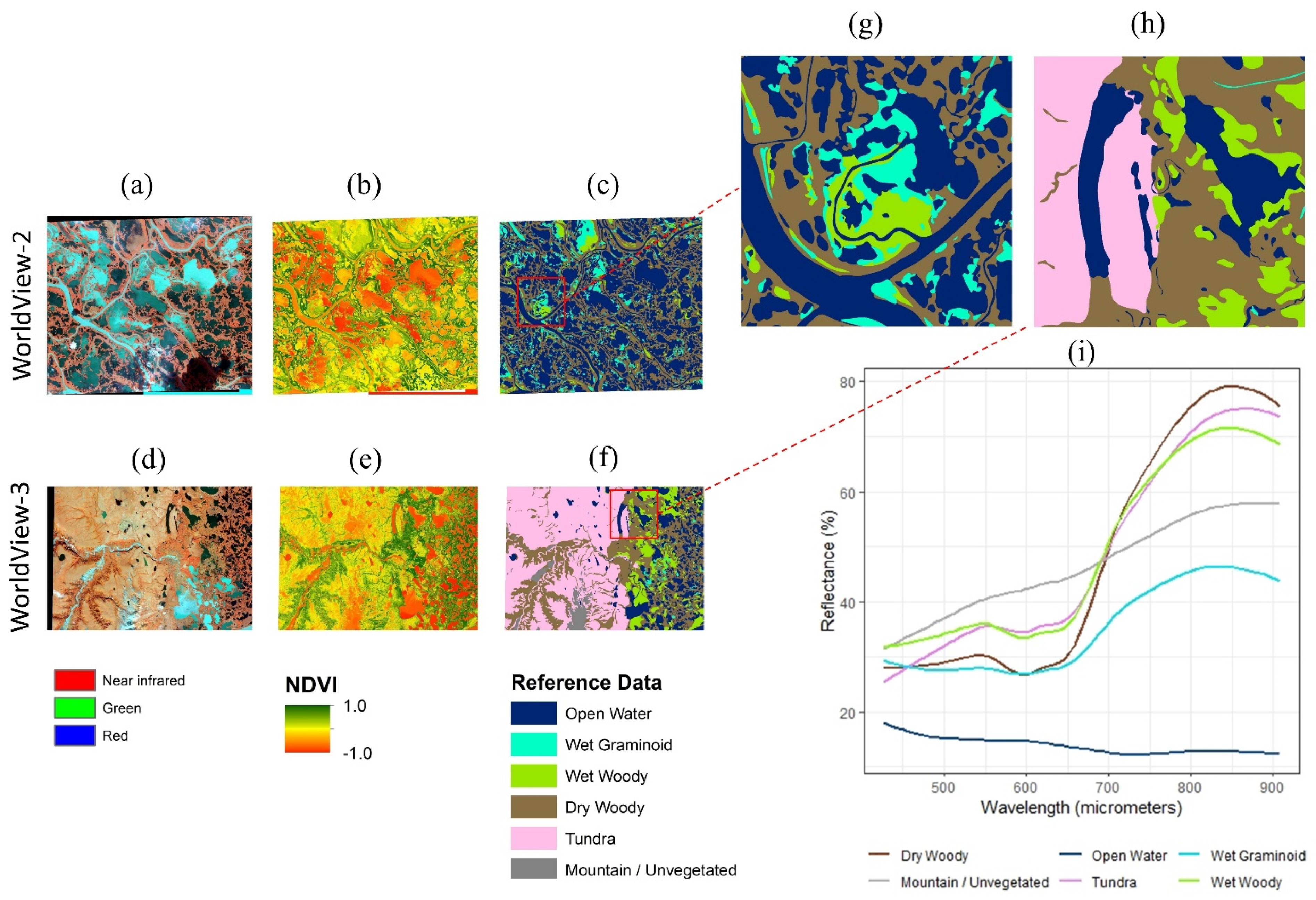
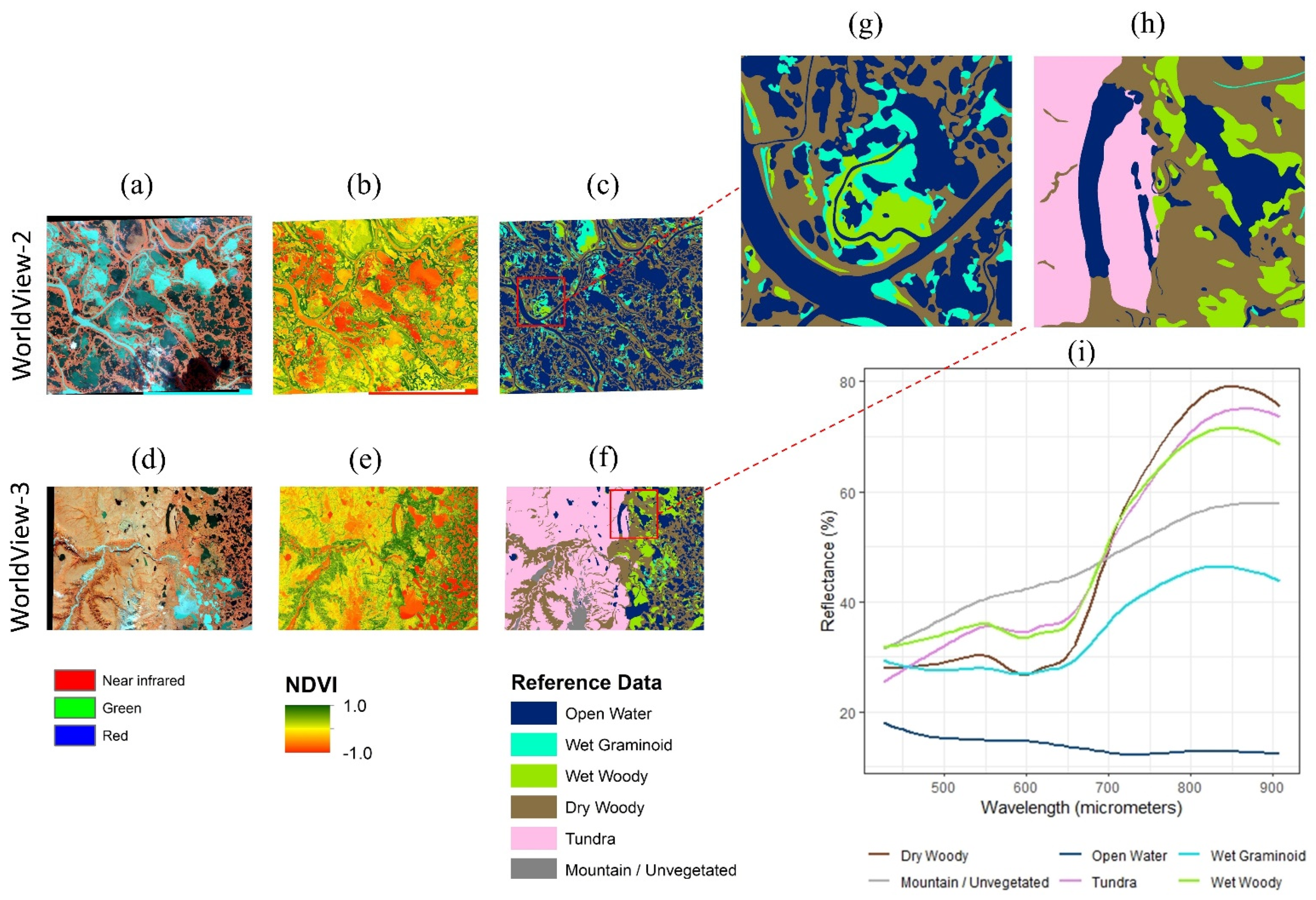
2.3. Reference Data
2.4. Sentinel-1 SAR Imagery
2.5. SAR Backscatter
2.6. Interferometric Coherence
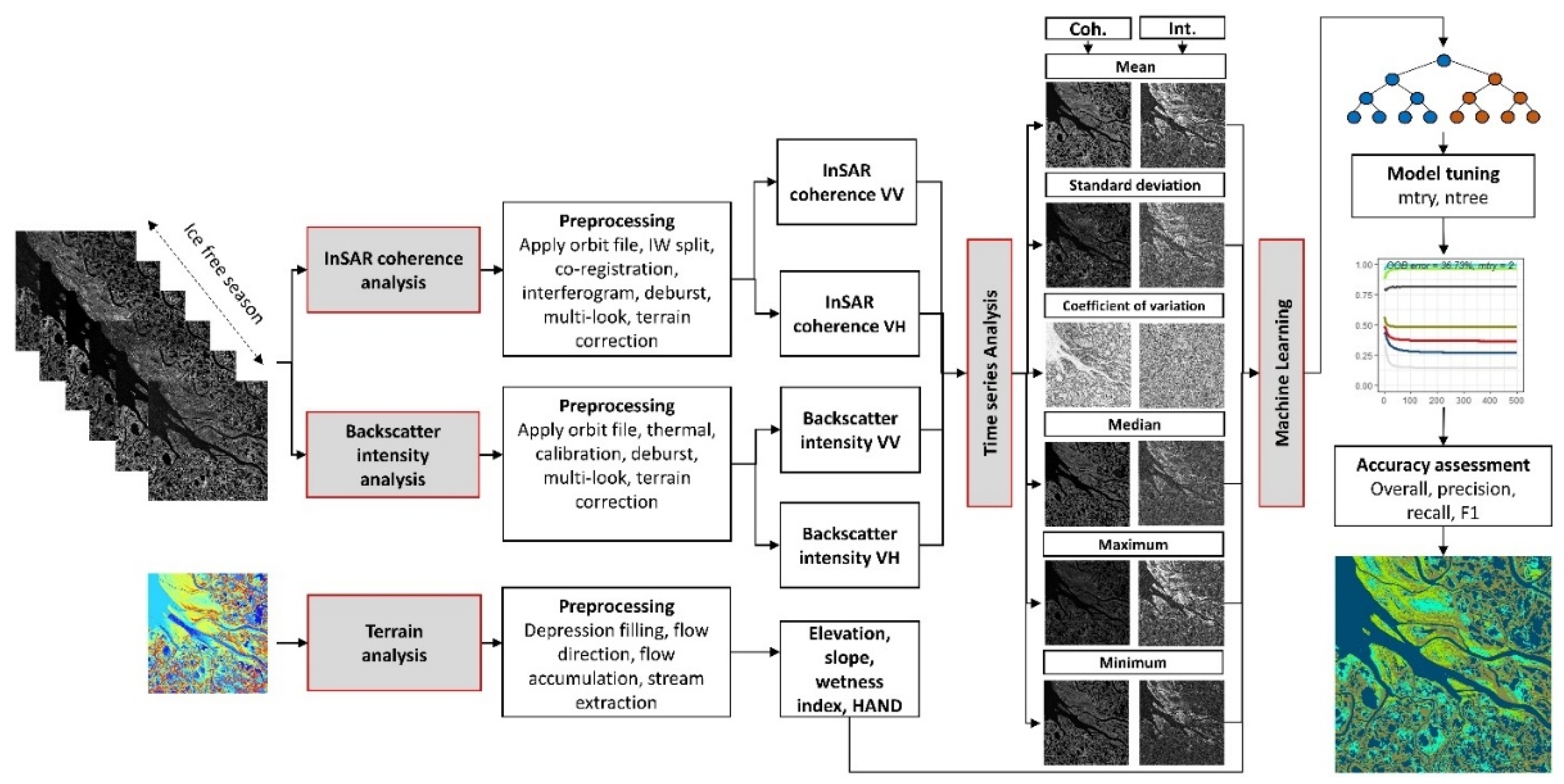
2.7. Sentinel-1 Image Processing
2.8. Time-Series Statistical Descriptors
2.9. Meteorological and Hydrometric Environmental Data
2.10. Topographic Data
2.11. Random Forest Modelling
2.12. Accuracy Assessment
3. Results and Discussion
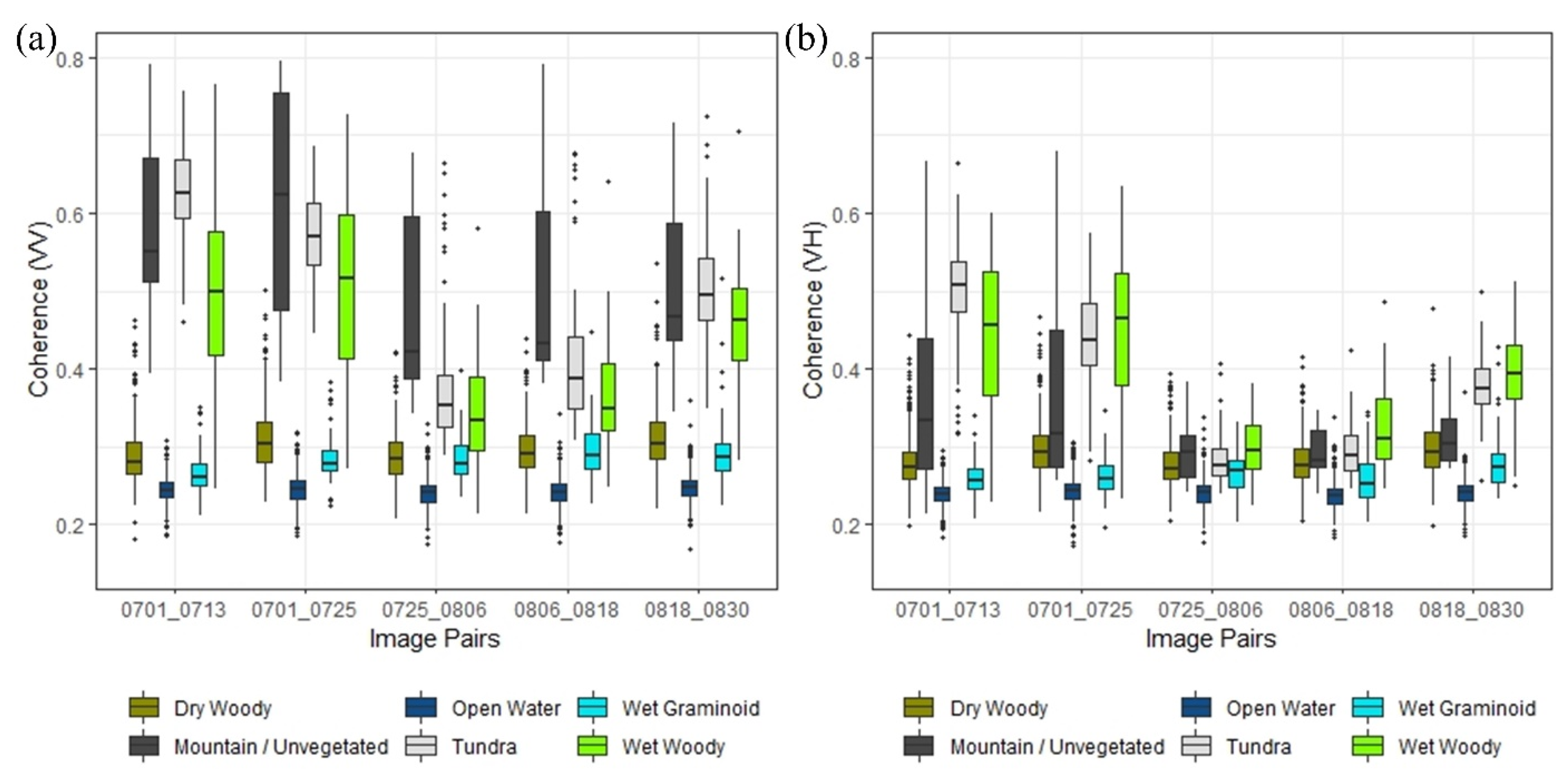
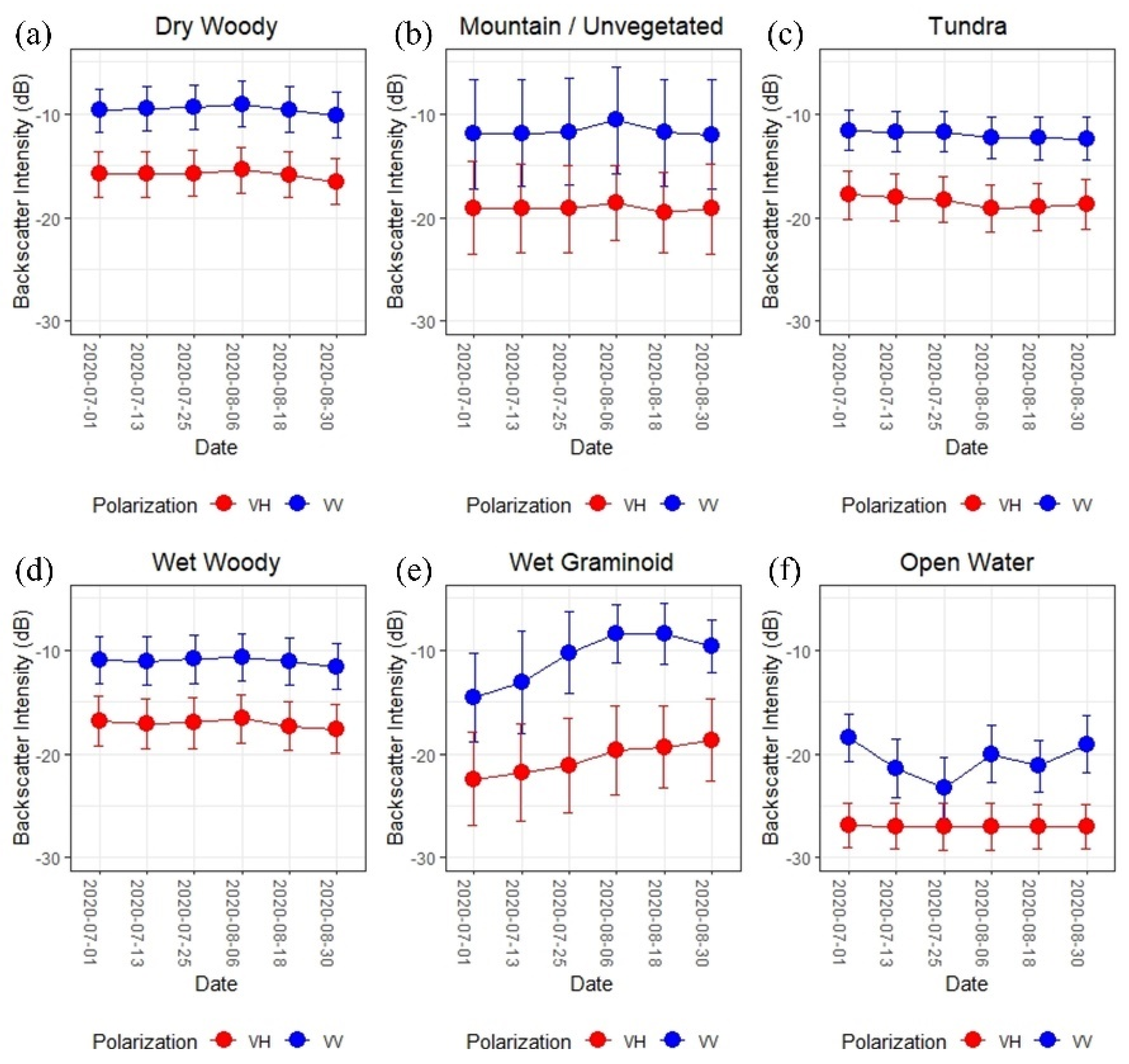
3.1. Temporal Observations of Coherence and Intensity
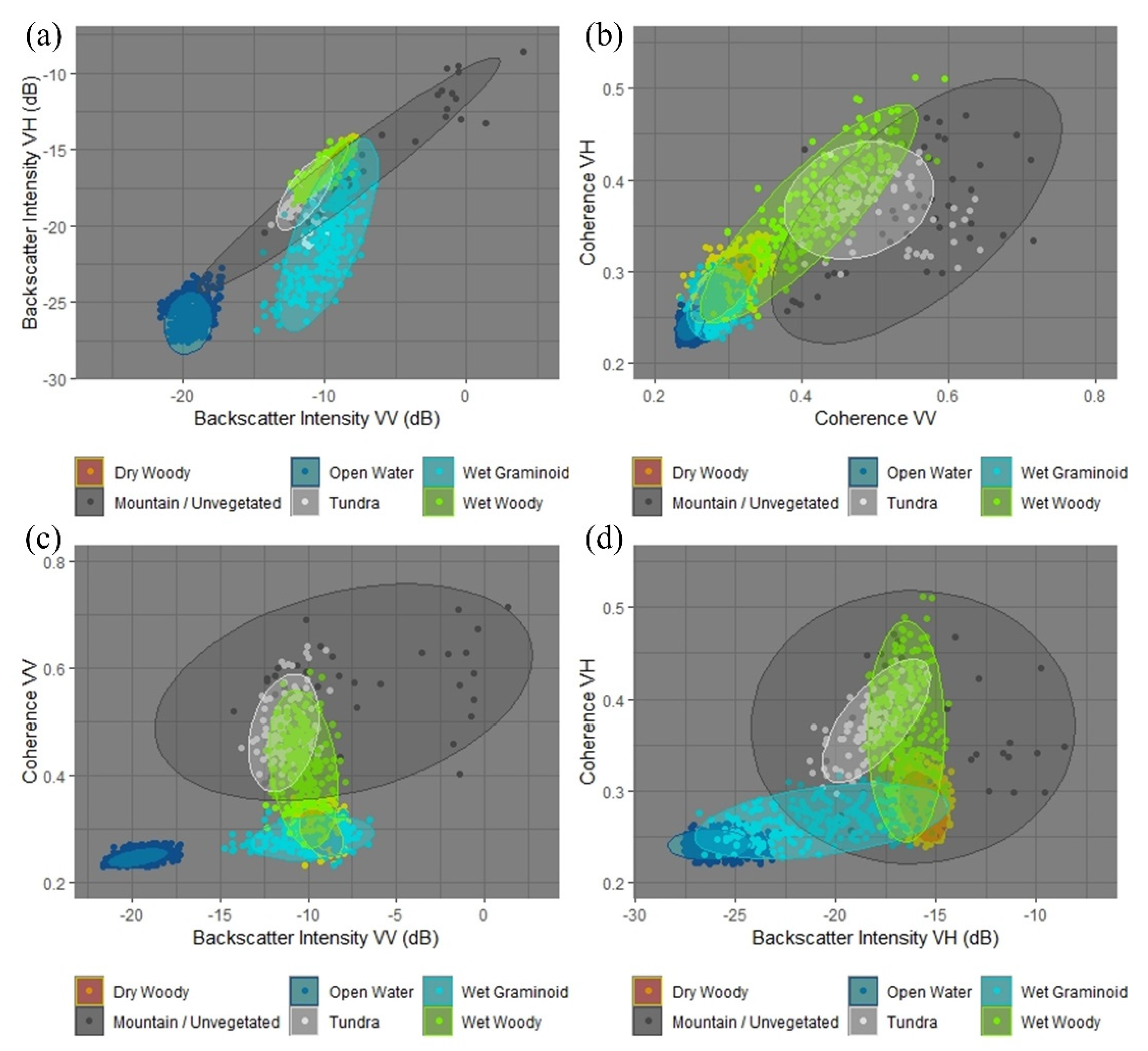
3.2. Feature Space Analysis
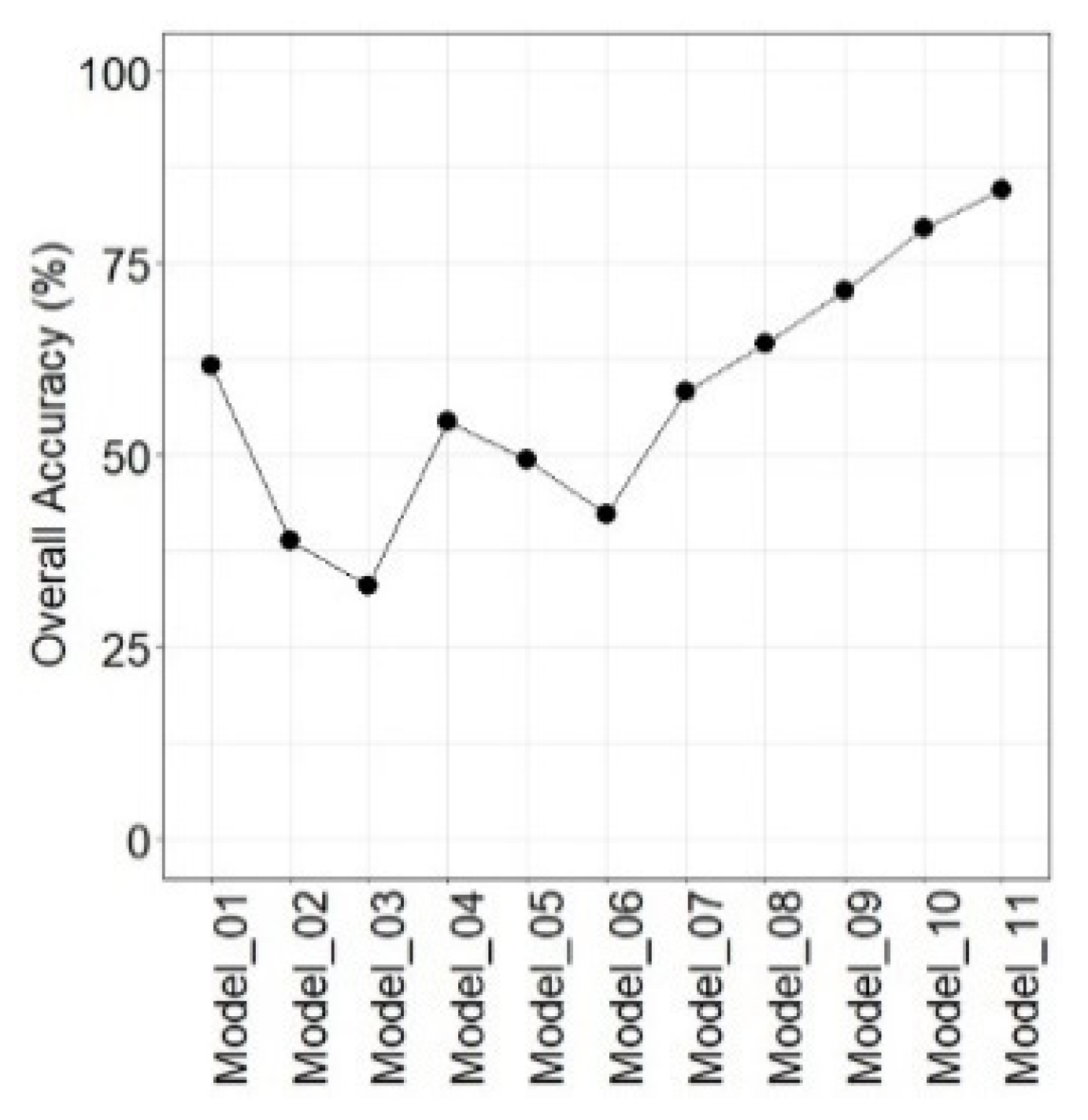
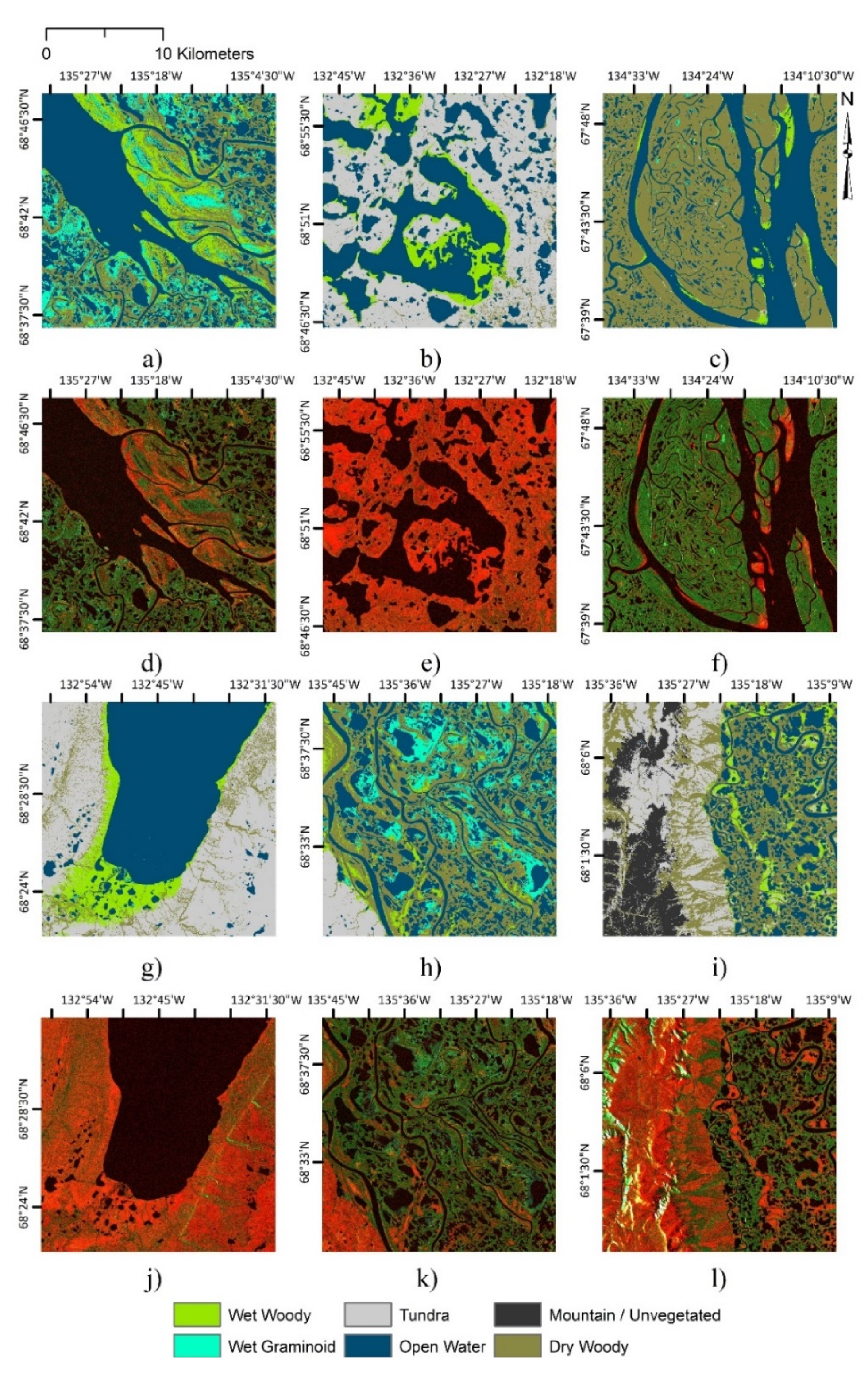
3.3. Classification Results
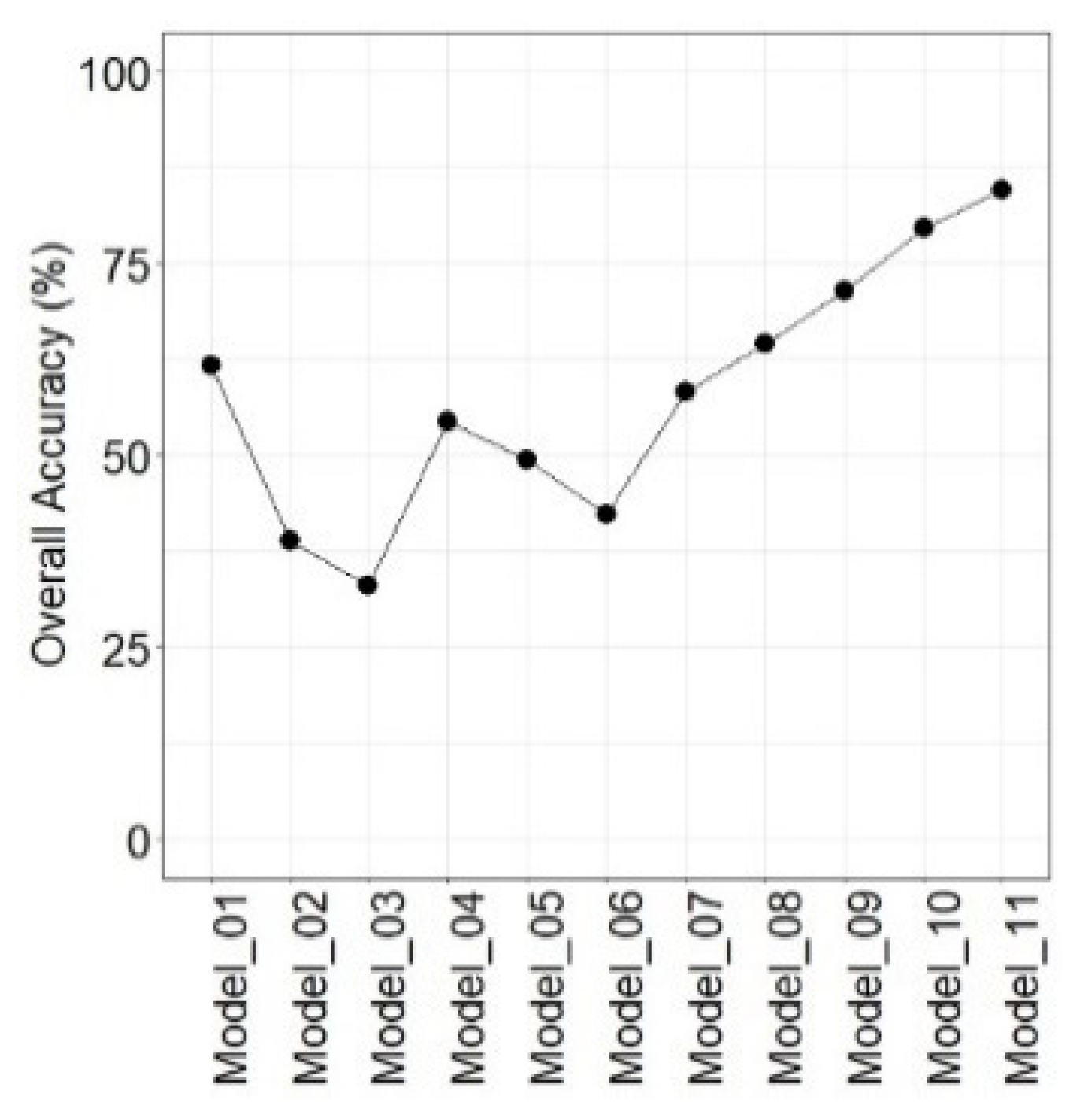
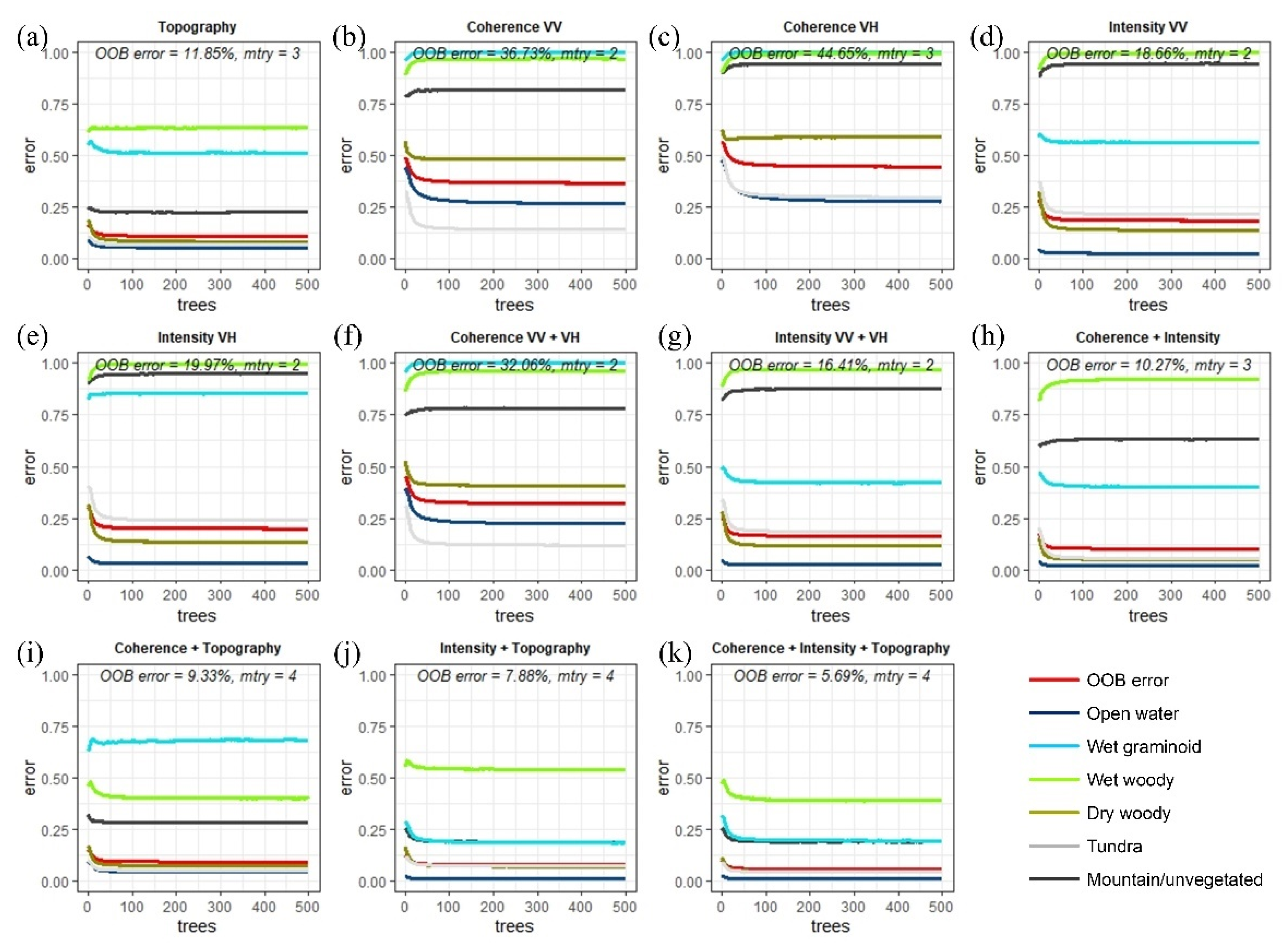
3.3.1. Effects of Model Hyperparameter Tuning
3.3.2. Classification Accuracy Assessments
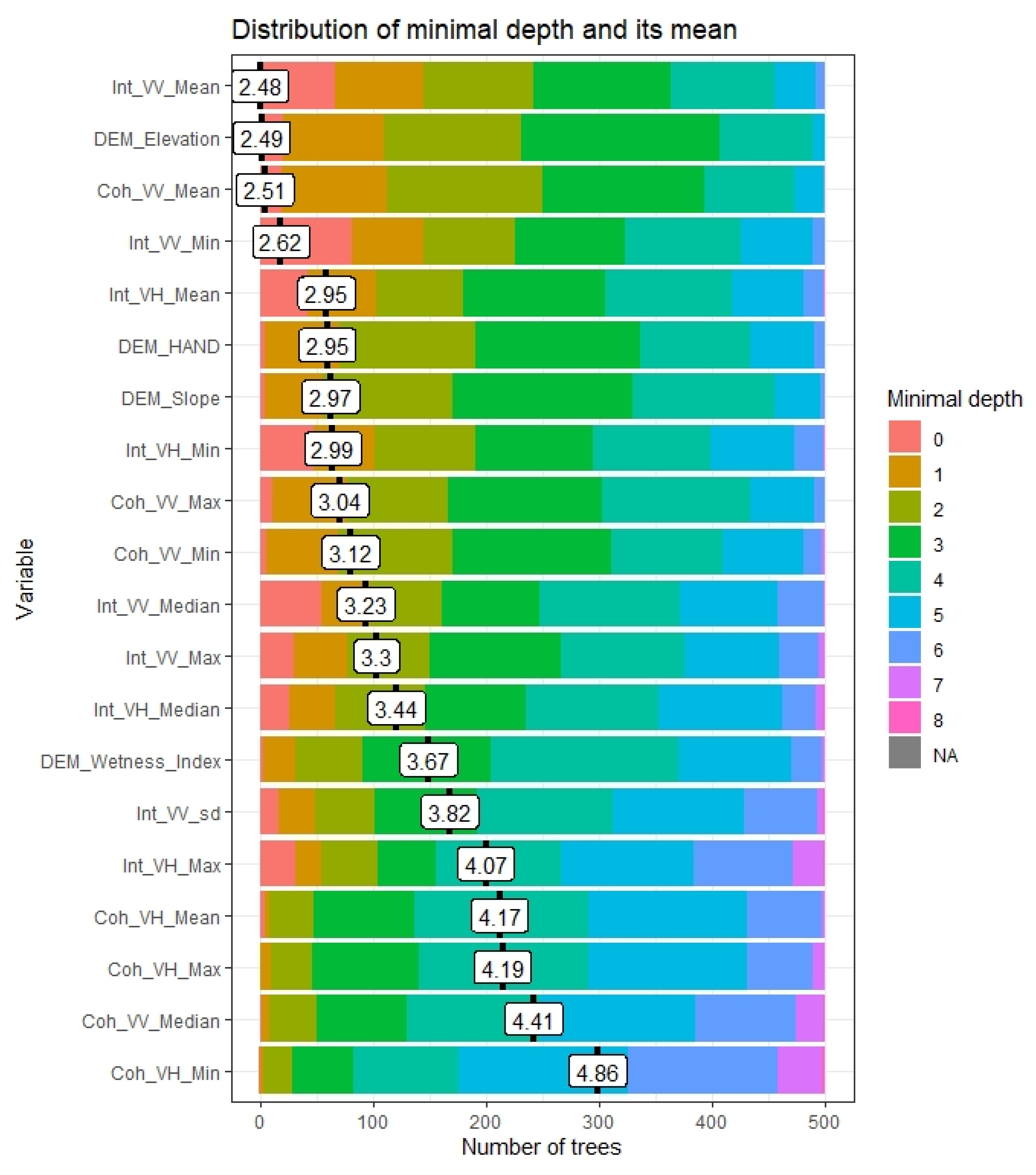
3.3.3. Variable Importance
3.3.4. Limitations and Future Analysis
4. Conclusions
- Wet woody, tundra, and mountain/unvegetated landcovers maintained the highest coherence over this study’s observation period, whereas wet graminoid, dry woody and open water landcovers showed the lowest coherence.
- Coherence was generally highest at the beginning of this study’s observation period, when water levels and discharge were high, whereas decorrelation occurred from phenological changes and landscape drying.
- Open water and wet graminoid landcovers demonstrated the most variability in backscatter intensity.
- SAR backscatter intensity was able to classify hydro-ecological classes more accurately than InSAR coherence.
- When intensity and coherence were combined, overall classification accuracies and per-class F1 score values were improved, suggesting that these SAR/InSAR variables are complimentary.
- Inclusion of topographic variables improved all machine learning model outcomes, a result of topography’s control on Arctic tundra biotic communities.
- A combination of coherence, intensity, and topographic variables resulted in a highest overall classification accuracy of 84%.
- The co-polarized VV channel demonstrated stronger predictor power than the cross-polarized VH.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IPCC. Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Masson-Delmotte, V., Zhai, P., Pirani, A., Connors, S.L., Péan, C., Berger, S., Caud, N., Chen, Y., Goldfarb, L.M.I., et al., Eds.; Cambridge University Press: Cambridge, UK, 2021. [Google Scholar]
- Berteaux, D.; Gauthier, G.; Domine, F.; Ims, R.A.; Lamoureux, S.F.; Lévesque, E.; Yoccoz, N. Effects of changing permafrost and snow conditions on tundra wildlife: Critical places and times. Arct. Sci. 2017, 3, 65–90. [Google Scholar] [CrossRef] [Green Version]
- Ford, J.; Smit, B. A framework for assessing the vulnerability of communities in the Canadian Arctic to risks associated with climate change. Arctic 2004, 57, 389–400. [Google Scholar] [CrossRef]
- Serreze, M.C.; Barry, R.G. Processes and impacts of Arctic amplification: A research synthesis. Glob. Planet. Chang. 2011, 77, 85–96. [Google Scholar] [CrossRef]
- Vonk, J.E.; Tank, S.E.; Bowden, W.B.; Laurion, I.; Vincent, W.F.; Alekseychik, P.; Amyot, M.; Billet, M.F.; Canário, J.; Cory, R.M.; et al. Reviews and syntheses: Effects of permafrost thaw on Arctic aquatic ecosystems. Biogeosciences 2015, 12, 7129–7167. [Google Scholar] [CrossRef] [Green Version]
- Junk, W.J.; An, S.; Finlayson, C.M.; Gopal, B.; Květ, J.; Mitchell, S.A.; Mitsch, W.J.; Robarts, R.D. Current state of knowledge regarding the world’s wetlands and their future under global climate change: A synthesis. Aquat. Sci. 2013, 75, 151–167. [Google Scholar] [CrossRef] [Green Version]
- Loranty, M.M.; Goetz, S.J. Shrub expansion and climate feedbacks in Arctic tundra. Environ. Res. Lett. 2012, 7, 011005. [Google Scholar] [CrossRef] [Green Version]
- Walvoord, M.A.; Voss, C.I.; Wellman, T.P. Influence of permafrost distribution on groundwater flow in the context of climate-driven permafrost thaw: Example from Yukon Flats Basin, Alaska, United States. Water Resour. Res. 2012, 48, 1–17. [Google Scholar] [CrossRef]
- Bring, A.; Fedorova, I.; Dibike, Y.; Hinzman, L.; Mård, J.; Mernild, S.H.; Prowse, T.; Semenova, O.; Stuefer, S.L.; Woo, M.K. Arctic terrestrial hydrology: A synthesis of processes, regional effects, and research challenges. J. Geophys. Res. G Biogeosci. 2016, 121, 621–649. [Google Scholar] [CrossRef]
- Tarnocai, C.; Canadell, J.G.; Schuur, E.A.G.; Kuhry, P.; Mazhitova, G.; Zimov, S. Soil organic carbon pools in the northern circumpolar permafrost region. Global Biogeochem. Cycles 2009, 23, 1–11. [Google Scholar] [CrossRef]
- Schuur, E.; McGuire, A.; Schadel, C.; Grosse, G.; Harden, J.; Hayes, D.; Hugelius, G.; Koven, C.; Puhry, P.; Lawrence, D.; et al. Climate change and the permafrost carbon feedback. Nature 2015, 520, 171–179. [Google Scholar] [CrossRef]
- Watts, J.D.; Kimball, J.S.; Bartsch, A.; McDonald, K.C. Surface water inundation in the boreal-Arctic: Potential impacts on regional methane emissions. Environ. Res. Lett. 2014, 9, 075001. [Google Scholar] [CrossRef]
- Du, J.; Watts, J.D.; Jiang, L.; Lu, H.; Cheng, X.; Duguay, C.; Farina, M.; Qiu, Y.; Kim, Y.; Kimball, J.S.; et al. Remote sensing of environmental changes in cold regions: Methods, achievements and challenges. Remote Sens. 2019, 11, 1952. [Google Scholar] [CrossRef] [Green Version]
- Beamish, A.; Raynolds, M.K.; Epstein, H.; Frost, G.V.; Macander, M.J.; Bergstedt, H.; Bartsch, A.; Kruse, S.; Miles, V.; Tanis, C.M.; et al. Recent trends and remaining challenges for optical remote sensing of Arctic tundra vegetation: A review and outlook. Remote Sens. Environ. 2020, 246, 111872. [Google Scholar] [CrossRef]
- A’Campo, W.; Bartsch, A.; Roth, A.; Wendleder, A.; Martin, V.S.; Durstewitz, L.; Lodi, R.; Wagner, J.; Hugelius, G. Arctic tundra land cover classification on the beaufort coast using the kennaugh element framework on dual-polarimetric TerraSAR-X imagery. Remote Sens. 2021, 13, 4780. [Google Scholar] [CrossRef]
- Chang, Q.; Zwieback, S.; DeVries, B.; Berg, A. Application of L-band SAR for mapping tundra shrub biomass, leaf area index, and rainfall interception. Remote Sens. Environ. 2022, 268, 112747. [Google Scholar] [CrossRef]
- Duguay, Y.; Bernier, M.; Lévesque, E.; Domine, F. Land cover classification in subarctic regions using fully polarimetric RADARSAT-2 data. Remote Sens. 2016, 8, 697. [Google Scholar] [CrossRef] [Green Version]
- Karlson, M.; Gålfalk, M.; Crill, P.; Bousquet, P.; Saunois, M.; Bastviken, D. Delineating Northern Peatlands Using Sentinel-1 Time Series and Terrain Indices from Local and Regional Digital Elevation Models. Remote Sens. Environ. 2019, 231, 111252. [Google Scholar] [CrossRef]
- Ullmann, T.; Banks, S.N.; Schmitt, A.; Jagdhuber, T. Scattering characteristics of X-, C- and L-band polsar data examined for the tundra environment of the Tuktoyaktuk Peninsula, Canada. Appl. Sci. 2017, 7, 595. [Google Scholar] [CrossRef] [Green Version]
- Buchelt, S.; Skov, K.; Ullmann, T. Sentinel-1 time series for mapping snow cover and timing of snowmelt in Arctic periglacial environments: Case study from the Zackenberg Valley, Greenland. Cryosph. Discuss. 2021, 16, 625–646. [Google Scholar] [CrossRef]
- Wang, L.; Marzahn, P.; Bernier, M.; Ludwig, R. Mapping permafrost landscape features using object-based image classification of multi-temporal SAR images. ISPRS J. Photogramm. Remote Sens. 2018, 141, 10–29. [Google Scholar] [CrossRef]
- Zwieback, S.; Berg, A.A. Fine-Scale SAR Soil Moisture Estimation in the Subarctic Tundra. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4898–4912. [Google Scholar] [CrossRef]
- Jawak, S.D.; Bidawe, T.G.; Luis, A.J. A Review on Applications of Imaging Synthetic Aperture Radar with a Special Focus on Cryospheric Studies. Adv. Remote Sens. 2015, 4, 163–175. [Google Scholar] [CrossRef] [Green Version]
- Malenovský, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; García-Santos, G.; Fernandes, R.; Berger, M. Sentinels for science: Potential of Sentinel-1, -2, and -3 missions for scientific observations of ocean, cryosphere, and land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- Osmanoğlu, B.; Sunar, F.; Wdowinski, S.; Cabral-Cano, E. Time series analysis of InSAR data: Methods and trends. ISPRS J. Photogramm. Remote Sens. 2016, 115, 90–102. [Google Scholar] [CrossRef]
- Semenzato, A.; Pappalardo, S.E.; Codato, D.; Trivelloni, U.; de Zorzi, S.; Ferrari, S.; de Marchi, M.; Massironi, M. Mapping and monitoring urban environment through sentinel-1 SAR data: A case study in the Veneto region (Italy). ISPRS Int. J. Geo-Inf. 2020, 9, 375. [Google Scholar] [CrossRef]
- Chini, M.; Pelich, R.; Pulvirenti, L.; Pierdicca, N.; Hostache, R.; Matgen, P. Sentinel-1 InSAR Coherence to Detect Floodwater in Urban Areas: Houston and Hurricane Harvey as A Test Case. Remote Sens. 2019, 11, 107. [Google Scholar] [CrossRef] [Green Version]
- Béjar-Pizarro, M.; Notti, D.; Mateos, R.M.; Ezquerro, P.; Centolanza, G.; Herrera, G.; Bru, G.; Sanabria, M.; Solari, L.; Duro, J.; et al. Mapping vulnerable urban areas affected by slow-moving landslides using Sentinel-1InSAR data. Remote Sens. 2017, 9, 876. [Google Scholar] [CrossRef] [Green Version]
- Amani, M.; Poncos, V.; Brisco, B.; Foroughnia, F.; Delancey, E.R.; Ranjbar, S. Insar coherence analysis for wetlands in alberta, canada using time-series sentinel-1 data. Remote Sens. 2021, 13, 3315. [Google Scholar] [CrossRef]
- Canisius, F.; Brisco, B.; Murnaghan, K.; Van Der Kooij, M.; Keizer, E. SAR backscatter and InSAR coherence for monitoring wetland extent, flood pulse and vegetation: A study of the Amazon lowland. Remote Sens. 2019, 11, 720. [Google Scholar] [CrossRef] [Green Version]
- Brisco, B.; Ahern, F.; Murnaghan, K.; White, L.; Canisus, F.; Lancaster, P. Seasonal change in wetland coherence as an aid to wetland monitoring. Remote Sens. 2017, 9, 158. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.W.; Lu, Z.; Gutenberg, L.; Zhu, Z. Characterizing hydrologic changes of the Great Dismal Swamp using SAR/InSAR. Remote Sens. Environ. 2017, 198, 187–202. [Google Scholar] [CrossRef]
- Battaglia, M.J.; Banks, S.; Behnamian, A.; Bourgeau-Chavez, L.; Brisco, B.; Corcoran, J.; Chen, Z.; Huberty, B.; Klassen, J.; Knight, J.; et al. Multi-source eo for dynamic wetland mapping and monitoring in the great lakes basin. Remote Sens. 2021, 13, 599. [Google Scholar] [CrossRef]
- Wang, L.; Marzahn, P.; Bernier, M.; Ludwig, R. Sentinel-1 InSAR measurements of deformation over discontinuous permafrost terrain, Northern Quebec, Canada. Remote Sens. Environ. 2020, 248, 111965. [Google Scholar] [CrossRef]
- Strozzi, T.; Antonova, S.; Günther, F.; Mätzler, E.; Vieira, G.; Wegmüller, U.; Westermann, S.; Bartsch, A. Sentinel-1 SAR interferometry for surface deformation monitoring in low-land permafrost areas. Remote Sens. 2018, 10, 1360. [Google Scholar] [CrossRef] [Green Version]
- Rouyet, L.; Lauknes, T.R.; Christiansen, H.H.; Strand, S.M.; Larsen, Y. Seasonal dynamics of a permafrost landscape, Adventdalen, Svalbard, investigated by InSAR. Remote Sens. Environ. 2019, 231, 111236. [Google Scholar] [CrossRef]
- Frison, P.L.; Fruneau, B.; Kmiha, S.; Soudani, K.; Dufrêne, E.; Le Toan, T.; Koleck, T.; Villard, L.; Mougin, E.; Rudant, J.P. Potential of Sentinel-1 data for monitoring temperate mixed forest phenology. Remote Sens. 2018, 10, 2094. [Google Scholar] [CrossRef] [Green Version]
- Pulella, A.; Santos, R.A.; Sica, F.; Posovszky, P.; Rizzoli, P. Multi-temporal sentinel-1 backscatter and coherence for rainforest mapping. Remote Sens. 2020, 12, 847. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Wang, B.; Xiang, M.; Zhou, L.; Jiang, S. Forest height estimation based on P-band pol-inSAR modeling and multi-baseline inversion. Remote Sens. 2020, 12, 1319. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Montpetit, B.; Banks, S.; White, L.; Behnamian, A.; Duffe, J.; Pasher, J. Insar monitoring of arctic landfast sea ice deformation using l-band alos-2, c-band radarsat-2 and sentinel-1. Remote Sens. 2021, 13, 4570. [Google Scholar] [CrossRef]
- Marbouti, M.; Praks, J.; Antropov, O.; Rinne, E.; Leppäranta, M. A study of landfast ice with Sentinel-1 repeat-pass interferometry over the Baltic Sea. Remote Sens. 2017, 9, 833. [Google Scholar] [CrossRef] [Green Version]
- Dierking, W.; Lang, O.; Busche, T. Sea ice local surface topography from single-pass satellite InSAR measurements: A feasibility study. Cryosphere 2017, 11, 1967–1985. [Google Scholar] [CrossRef] [Green Version]
- Zebker, H.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Brisco, B.; Motagh, M. Multi-temporal, multi-frequency, and multi-polarization coherence and SAR backscatter analysis of wetlands. ISPRS J. Photogramm. Remote Sens. 2018, 142, 78–93. [Google Scholar] [CrossRef]
- Pepe, A.; Calò, F. A review of interferometric synthetic aperture RADAR (InSAR) multi-track approaches for the retrieval of Earth’s Surface displacements. Appl. Sci. 2017, 7, 1264. [Google Scholar] [CrossRef] [Green Version]
- Bamler, R.; Hartl, P. Synthetic aperture radar interferometry. Inverse Probl. 1998, 88, R1–R54. [Google Scholar] [CrossRef]
- Marsh, P.; Pomeroy, J.W. Meltwater fluxes at an arctic forest-tundra site. Hydrol. Process. 1996, 10, 1383–1400. [Google Scholar] [CrossRef]
- Marsh, P.; Onclin, C.; Russell, M. A multi-year hydrological data set for two research basins in the Mackenzie Delta region, NW Canada. In Proceedings of the Northern Research Basins Water Balance, Victoria, BC, Canada, 15–19 March 2004; pp. 205–212. [Google Scholar]
- Shi, X.; Marsh, P.; Yang, D. Warming spring air temperatures, but delayed spring streamflow in an Arctic headwater basin. Environ. Res. Lett. 2015, 10, 064003. [Google Scholar] [CrossRef]
- Macdonald, R.; Wong, C.; Erickson, P. The distribution of nutrients in the southeastern Beaufort Sea: Implications for water circulation and primary production. J. Geophys. Res. Ocean. 1987, 92, 2939–2952. [Google Scholar] [CrossRef]
- Rood, S.B.; Kaluthota, S.; Philipsen, L.J.; Rood, N.J.; Zanewich, K.P. Increasing discharge from the Mackenzie River system to the Arctic Ocean. Hydrol. Process. 2017, 31, 150–160. [Google Scholar] [CrossRef]
- Burn, C. Mackenzie Delta: Canada’s principle arctic delta. In Landscapes and Landforms of Western Canada; Slaymaker, O., Ed.; Springer: Gewerbestrasse, Switzerland, 2016; pp. 321–334. [Google Scholar]
- Heginbottom, J. Canada-Permafrost; Plate 2.1 (MCR 4177); Walter de Gruyter: Berlin, Germany, 1995. [Google Scholar] [CrossRef]
- Macdonald, R.W.; Yu, Y. The Mackenzie Estuary of the Arctic ocean. Handb. Environ. Chem. 2006, 5, 91–120. [Google Scholar]
- Marsh, P.; Hey, M. The Flooding Hydrology of Mackenzie Delta Lakes near Inuvik. Arctic 1989, 42, 41–49. [Google Scholar] [CrossRef] [Green Version]
- Gill, D. The Point Bar Environment in the Mackenzie River Delta. Can. J. Earth Sci. 1972, 9, 1382–1393. [Google Scholar] [CrossRef]
- Pohl, S.; Davison, B.; Marsh, P.; Pietroniro, A. Modelling spatially distributed snowmelt and meltwater runoff in a small arctic catchment with a hydrology land-surface scheme (WATCLASS). Atmos. Ocean. 2005, 43, 193–211. [Google Scholar] [CrossRef]
- Rouse, J.W.; Hass, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. Third Earth Resour. Technol. Satell. Symp. 1973, 1, 309–317. [Google Scholar]
- Muhuri, A.; Manickam, S.; Bhattacharya, A. Snehmani snow cover mapping using polarization fraction variation with temporal RADARSAT-2 C-band full-polarimetric SAR data over the Indian Himalayas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2192–2209. [Google Scholar] [CrossRef]
- Park, S.E. Variations of microwave scattering properties by seasonal freeze/thaw transition in the permafrost active layer observed by ALOS PALSAR polarimetric data. Remote Sens. 2015, 7, 17135–17148. [Google Scholar] [CrossRef] [Green Version]
- Adeli, S.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.J.; Brisco, B.; Tamiminia, H.; Shaw, S. Wetland monitoring using SAR Data: A meta-analysis and comprehensive review. Remote Sens. 2020, 12, 2190. [Google Scholar] [CrossRef]
- Liu, F.; Jiao, L.; Hou, B.; Yang, S. POL-SAR Image Classification Based on Wishart DBN and Local Spatial Information. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3292–3308. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bruniquel, J.; Vachon, P.W. Coherence estimation for SAR imagery. IEEE Trans. Geosci. Remote Sens. 1999, 37, 135–149. [Google Scholar] [CrossRef] [Green Version]
- Seymour, M.S.; Cumming, I.G. Maximum likelihood estimation for SAR interferometry. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Pasadena, CA, USA, 8–12 August 1994; Volume 4, pp. 2272–2274. [Google Scholar]
- European Space Agency. Science Tool Exploitation Platform—Sentinel Application Platform (STEP-SNAP). Available online: http://step.esa.int/main/toolboxes/snap/ (accessed on 1 June 2021).
- Braun, A.; Veci, L. TOPS Interferometry Tutorial; ESA: Paris, France, 2021. [Google Scholar]
- Millard, K.; Kirby, P.; Nandlall, S.; Behnamian, A.; Banks, S.; Pacini, F. Using growing-season time series coherence for improved peatland mapping: Comparing the contributions of Sentinel-1 and RADARSAT-2 coherence in full and partial time series. Remote Sens. 2020, 12, 2465. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2017. [Google Scholar]
- Meteorological Service of Canada. Historical Climate Data. Available online: https://climate.weather.gc.ca/ (accessed on 1 June 2021).
- European Space Agency. Copernicus DEM-Global and European Digital Elevation Model (COP-DEM). Available online: https://spacedata.copernicus.eu/web/cscda/dataset-details?articleId=394198 (accessed on 1 June 2021).
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef] [Green Version]
- Nobre, A.D.; Cuartas, L.A.; Hodnett, M.; Rennó, C.D.; Rodrigues, G.; Silveira, A.; Waterloo, M.; Saleska, S. Height Above the Nearest Drainage-A hydrologically relevant new terrain model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef] [Green Version]
- Lindsay, J. Whitebox GAT: A case study in geomorphometric analysis. Comput. Geosci. 2016, 95, 75–84. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Merchant, M.; Warren, R.; Edwards, R.; Kenyon, J. An Object-Based Assessment of Multi-Wavelength SAR, Optical Imagery and Topographical Datasets for Operational Wetland Mapping in Boreal Yukon, Canada. Can. J. Remote Sens. 2019, 45, 308–332. [Google Scholar] [CrossRef]
- Kloiber, S.M.; Macleod, R.D.; Smith, A.J.; Knight, J.F.; Huberty, B.J. A Semi-Automated, Multi-Source Data Fusion Update of a Wetland Inventory for East-Central Minnesota, USA. Wetlands 2015, 35, 335–348. [Google Scholar] [CrossRef]
- Miao, X.; Heaton, J.S.; Zheng, S.; Charlet, D.A.; Liu, H. Applying tree-based ensemble algorithms to the classification of ecological zones using multi-temporal multi-source remote-sensing data. Int. J. Remote Sens. 2012, 33, 1823–1849. [Google Scholar] [CrossRef]
- Guan, H.; Li, J.; Chapman, M.; Deng, F.; Ji, Z.; Yang, X. Integration of orthoimagery and lidar data for object-based urban thematic mapping using random forests. Int. J. Remote Sens. 2013, 34, 5166–5186. [Google Scholar] [CrossRef]
- Belgiu, M.; Dragut, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Smith, L.C.; Melack, J.M. Amazon floodplain water level changes measured with interferometric SIR-C radar. IEEE Trans. Geosci. Remote Sens. 2001, 39, 423–431. [Google Scholar] [CrossRef]
- Liao, H.; Wdowinski, S.; Li, S. Regional-scale hydrological monitoring of wetlands with Sentinel-1 InSAR observations: Case study of the South Florida Everglades. Remote Sens. Environ. 2020, 251, 112051. [Google Scholar] [CrossRef]
- Kim, S.W.; Wdowinski, S.; Amelung, F.; Dixon, T.H.; Won, J.S. Interferometric coherence analysis of the everglades Wetlands, South Florida. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5210–5224. [Google Scholar] [CrossRef]
- Hong, S.H.; Wdowinski, S. Evaluation of the quad-polarimetric Radarsat-2 observations for the wetland InSAR application. Can. J. Remote Sens. 2012, 37, 484–492. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.W.; Lu, Z.; Lee, H.; Shum, C.K.; Swarzenski, C.M.; Doyle, T.W.; Baek, S.H. Integrated analysis of PALSAR/Radarsat-1 InSAR and ENVISAT altimeter data for mapping of absolute water level changes in Louisiana wetlands. Remote Sens. Environ. 2009, 113, 2356–2365. [Google Scholar] [CrossRef]
- Stow, D.A.; Hope, A.; McGuire, D.; Verbyla, D.; Gamon, J.; Huemmrich, F.; Houston, S.; Racine, C.; Sturm, M.; Tape, K.; et al. Remote sensing of vegetation and land-cover change in Arctic Tundra Ecosystems. Remote Sens. Environ. 2004, 89, 281–308. [Google Scholar] [CrossRef] [Green Version]
- Dabboor, M.; Brisco, B. Wetland Monitoring and Mapping Using Synthetic Aperture Radar. In Wetlands Management-Assessing Risk and Sustainable Solutions; IntechOpen: Berlin, Germany, 2018. [Google Scholar]
- Chen, Y.; Qiao, S.; Zhang, G.; Xu, Y.J.; Chen, L.; Wu, L. Investigating the potential use of Sentinel-1 data for monitoring wetland water level changes in China’s Momoge National Nature Reserve. PeerJ 2020, 8, e8616. [Google Scholar] [CrossRef]
- White, L.; Brisco, B.; Dabboor, M.; Schmitt, A.; Pratt, A. A collection of SAR methodologies for monitoring wetlands. Remote Sens. 2015, 7, 7615–7645. [Google Scholar] [CrossRef] [Green Version]
- Cutler, D.R.; Edwards, T.C.; Beard, K.H.; Cutler, A.; Hess, K.T.; Gibson, J.; Lawler, J.J. Random forests for classification in ecology. Ecology 2007, 88, 2783–2792. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Z.; Tian, B.; Zhou, J.; Tang, P. The backscattering characteristics of wetland vegetation and water-level changes detection using multi-mode SAR: A case study. Int. J. Appl. Earth Obs. Geoinf. 2016, 45, 1–13. [Google Scholar] [CrossRef]
- Zhang, X.; Chan, N.W.; Pan, B.; Ge, X.; Yang, H. Mapping flood by the object-based method using backscattering coefficient and interference coherence of Sentinel-1 time series. Sci. Total Environ. 2021, 794, 148388. [Google Scholar] [CrossRef]
- Walker, D.A. Hierarchical subdivision of Artic tundra based on vegetation response to climate, parent material and topography. Glob. Chang. Biol. 2000, 6, 19–34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Young, F. Geological and geographical guide to the Mackenzie Delta area. In Proceedings of the CSPG International Conference Facts and Principles of World Oil Occurrence, Calgary, AB, Canada, 26–28 June 1978; pp. 110–121. [Google Scholar]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P. Detection of Temporary Flooded Vegetation Using Sentinel-1 Time Series Data. Remote Sens. 2018, 10, 1286. [Google Scholar] [CrossRef] [Green Version]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R.; Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. SAR-based detection of flooded vegetation–A review of characteristics and approaches. Int. J. Remote Sens. 2018, 39, 2255–2293. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S. A Three-Component Scattering Model for Polarimetric SAR Data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef] [Green Version]
- Bartsch, A.; Höfler, A.; Kroisleitner, C.; Trofaier, A. Land cover mapping in northern high latitude permafrost regions with satellite data: Achievements and remaining challenges. Remote Sens. 2016, 8, 979. [Google Scholar] [CrossRef] [Green Version]
- Paluszynska, A.; Biecek, P.; Jiang, Y. Random Forest Explainer: Explaining and Visualizing Random Forests in Terms of Variable Importance. R Package Version 0.9 2017. Available online: https://github.com/ModelOriented/randomForestExplainer (accessed on 1 December 2021).
- Millard, K.; Richardson, M. On the importance of training data sample selection in random forest image classification: A case study in peatland ecosystem mapping. Remote Sens. 2015, 7, 8489–8515. [Google Scholar] [CrossRef] [Green Version]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forests for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Thapa, A.; Bradford, L.; Strickert, G.; Yu, X.; Johnston, A.; Watson-Daniels, K. “Garbage in, garbage out” Does not hold true for indigenous community flood extent modeling in the prairie pothole region. Water 2019, 11, 2486. [Google Scholar] [CrossRef] [Green Version]
- Minotti, P.G.; Rajngewerc, M.; Alí Santoro, V.; Grimson, R. Evaluation of SAR C-band interferometric coherence time-series for coastal wetland hydropattern mapping. J. S. Am. Earth Sci. 2021, 106, 102976. [Google Scholar] [CrossRef]
- Dronova, I. Object-Based Image Analysis in Wetland Research: A Review. Remote Sens. 2015, 7, 6380–6413. [Google Scholar] [CrossRef] [Green Version]
- Fu, B.; Wang, Y.; Campbell, A.; Li, Y.; Zhang, B.; Yin, S.; Xing, Z.; Jin, X. Comparison of Object-Based and Pixel-Based Random Forest Algorithm for Wetland Vegetation Mapping Using High Spatial Resolution GF-1 and SAR Data. Ecol. Indic. 2017, 73, 105–117. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google Earth Engine for geo-big data applications: A meta-analysis and systematic review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]
- Piter, A.; Vassileva, M.; Haghshenas Haghighi, M.; Motagh, M. Exploring cloud-based platforms for rapid insar time series analysis. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 171–176. [Google Scholar] [CrossRef]
- Mahdavi, S.; Salehi, B.; Granger, J.; Amani, M.; Brisco, B.; Huang, W. Remote sensing for wetland classification: A comprehensive review. GISci. Remote Sens. 2018, 55, 623–658. [Google Scholar] [CrossRef]
- Liao, T.H.; Simard, M.; Denbina, M.; Lamb, M.P. Monitoring water level change and seasonal vegetation change in the coastal wetlands of louisiana using L-band time-series. Remote Sens. 2020, 12, 2351. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Inputs | Statistic | OW | WG | WW | DW | TU | MU |
|---|---|---|---|---|---|---|---|---|
| 1 | DEM | Precision | 0.625 | 0.952 | 0.587 | 0.429 | 0.725 | 0.993 |
| Recall | 0.926 | 0.372 | 0.084 | 0.877 | 0.875 | 0.461 | ||
| F1 score | 0.746 | 0.084 | 0.148 | 0.577 | 0.793 | 0.630 | ||
| 2 | CVV | Precision | 0.441 | 0.000 | 0.056 | 0.318 | 0.376 | 0.811 |
| Recall | 0.752 | 0.000 | 0.002 | 0.504 | 0.855 | 0.128 | ||
| F1 score | 0.556 | 0.000 | 0.004 | 0.390 | 0.522 | 0.222 | ||
| 3 | CVH | Precision | 0.366 | 0.000 | 0.625 | 0.265 | 0.329 | 0.880 |
| Recall | 0.753 | 0.000 | 0.010 | 0.399 | 0.685 | 0.044 | ||
| F1 score | 0.492 | 0.000 | 0.019 | 0.319 | 0.445 | 0.083 | ||
| 4 | IVV | Precision | 0.762 | 0.954 | 0.000 | 0.408 | 0.443 | 0.929 |
| Recall | 0.988 | 0.427 | 0.000 | 0.877 | 0.804 | 0.026 | ||
| F1 score | 0.860 | 0.590 | 0.000 | 0.557 | 0.571 | 0.050 | ||
| 5 | IVH | Precision | 0.642 | 0.751 | 0.000 | 0.442 | 0.398 | 0.735 |
| Recall | 0.983 | 0.141 | 0.000 | 0.880 | 0.783 | 0.025 | ||
| F1 score | 0.776 | 0.237 | 0.000 | 0.588 | 0.527 | 0.048 | ||
| 6 | CVV, CVH | Precision | 0.485 | 0.000 | 0.088 | 0.356 | 0.400 | 0.899 |
| Recall | 0.817 | 0.000 | 0.003 | 0.592 | 0.886 | 0.142 | ||
| F1 score | 0.609 | 0.000 | 0.006 | 0.445 | 0.552 | 0.246 | ||
| 7 | IVV, IVH | Precision | 0.754 | 0.911 | 0.167 | 0.463 | 0.457 | 0.940 |
| Recall | 0.988 | 0.579 | 0.004 | 0.898 | 0.813 | 0.079 | ||
| F1 score | 0.856 | 0.708 | 0.008 | 0.611 | 0.585 | 0.145 | ||
| 8 | CVV, CVH, IVV, IVH | Precision | 0.797 | 0.932 | 0.153 | 0.608 | 0.457 | 0.962 |
| Recall | 0.993 | 0.571 | 0.009 | 0.968 | 0.944 | 0.254 | ||
| F1 score | 0.884 | 0.708 | 0.017 | 0.747 | 0.616 | 0.402 | ||
| 9 | CVV, CVH, DEM | Precision | 0.612 | 0.973 | 0.908 | 0.614 | 0.731 | 0.991 |
| Recall | 0.956 | 0.312 | 0.529 | 0.938 | 0.930 | 0.534 | ||
| F1 score | 0.746 | 0.472 | 0.668 | 0.742 | 0.818 | 0.694 | ||
| 10 | IVV, IVH, DEM | Precision | 0.914 | 0.990 | 0.866 | 0.570 | 0.749 | 0.993 |
| Recall | 0.993 | 0.831 | 0.321 | 0.934 | 0.906 | 0.725 | ||
| F1 score | 0.952 | 0.903 | 0.468 | 0.708 | 0.820 | 0.838 | ||
| 11 | CVV, CVH, IVV, IVH, DEM | Precision | 0.919 | 0.993 | 0.919 | 0.700 | 0.737 | 0.993 |
| Recall | 0.994 | 0.859 | 0.542 | 0.975 | 0.939 | 0.706 | ||
| F1 score | 0.955 | 0.921 | 0.682 | 0.815 | 0.826 | 0.826 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merchant, M.A.; Obadia, M.; Brisco, B.; DeVries, B.; Berg, A. Applying Machine Learning and Time-Series Analysis on Sentinel-1A SAR/InSAR for Characterizing Arctic Tundra Hydro-Ecological Conditions. Remote Sens. 2022, 14, 1123. https://doi.org/10.3390/rs14051123
Merchant MA, Obadia M, Brisco B, DeVries B, Berg A. Applying Machine Learning and Time-Series Analysis on Sentinel-1A SAR/InSAR for Characterizing Arctic Tundra Hydro-Ecological Conditions. Remote Sensing. 2022; 14(5):1123. https://doi.org/10.3390/rs14051123
Chicago/Turabian StyleMerchant, Michael Allan, Mayah Obadia, Brian Brisco, Ben DeVries, and Aaron Berg. 2022. "Applying Machine Learning and Time-Series Analysis on Sentinel-1A SAR/InSAR for Characterizing Arctic Tundra Hydro-Ecological Conditions" Remote Sensing 14, no. 5: 1123. https://doi.org/10.3390/rs14051123