1. Introduction
The integration of distributed generation (DG) systems, primarily wind and solar power, into the grid has significantly reduced the inertia of power systems [
1]. This reduction makes the system more susceptible to frequency oscillations when subjected to disturbances, presenting new challenges to the safe and stable operation of power systems [
2].
In conventional power systems, synchronous machines provide inertia support. In modern power systems, grid-forming converter-based DG autonomously establishes voltage and frequency to provide grid support capabilities [
3]. Among these technologies, the virtual synchronous generator (VSG) control [
4] introduces rotor motion equations into the converter to emulate the external characteristics of synchronous generators, thereby endowing DG with corresponding inertia and damping [
5]. While this enhances power system inertia, it simultaneously introduces active power–frequency oscillations [
6]. Compared to single-machine systems, parallel-operated multi-VSG systems exhibit more severe active power–frequency oscillations during disturbances [
7].
The stability analysis of multi-VSG systems is typically conducted using state–space methods [
8]. The state–space approach employs root locus techniques for systematic stability analysis of the control parameters. Reference [
9] simplified the model to develop a novel third-order control model that demonstrates high accuracy in power system stability analysis. A comprehensive state–space model was established in [
10], while [
11] developed a small-signal model for parallel multi-VSG systems to investigate the mechanism of active power output oscillations. Furthermore, [
12] proposed a generalized small-signal model for multi-machine VSG systems, enabling precise analysis of how control parameters influence frequency stability. Research indicates that virtual inertia [
13], damping coefficients, active power droop coefficients, outer-loop control parameters, and line impedance characteristics [
14] collectively impact the stability of multi-machine systems [
15].
Current research on frequency oscillation suppression in multi-VSG parallel systems has primarily focused on two control strategy categories: power control strategies and dynamic damping/inertia adjustment approaches. Power control strategies achieve oscillation suppression through active power output regulation, though their effectiveness is limited by the inherent time delay between control signal initiation and power output adjustment, particularly during rapid load transitions where they may fail to meet oscillation suppression requirements. A centralized control method based on the center of inertia concept was proposed in [
16] to adjust VSG input power for suppressing power fluctuations and mitigating frequency oscillations. A distributed communication framework is developed in [
17] to establish angular frequency references through load factor interaction among multiple VSGs, where active power compensation is generated from frequency deviations for frequency restoration purposes. Through system impedance modeling, it is demonstrated in [
18] that the fundamental oscillation mechanism is constituted by the interplay between system inertia and damping characteristics, which leads to the classification of existing suppression methods into damping control and inertia control categories. A decentralized mutual damping approach is introduced in [
19], where damping terms are enhanced through power derivatives, while frequency differences among units are incorporated via consensus control to accelerate transient frequency convergence. A dynamic virtual damping control technique is presented in [
20], where damped low-frequency oscillation components are superimposed onto electromagnetic torque to enhance system damping during transient conditions for active power–frequency oscillation suppression. A novel control strategy combining consensus-based mutual damping with model predictive control is proposed in [
21] to simultaneously achieve oscillation suppression and optimal economic active power dispatch.
The damping control method indirectly regulates the rate of frequency change through torque difference compensation, thereby suppressing the magnitude of frequency oscillations. In contrast to damping control, virtual inertia control directly modulates the frequency change rate through dynamic virtual inertia adjustment without requiring torque compensation. This approach enables faster response to smooth frequency fluctuations while maintaining a relatively simpler control architecture that is more renewable-energy-friendly. Regarding dynamic inertia adjustment, a fuzzy control-based technique is developed in [
22], where governor output power is adaptively regulated through fuzzy logic to reinforce system inertia for effective load fluctuation mitigation. An adaptive virtual inertia control scheme is developed in [
23], which employs decentralized local control to dynamically adjust rotational inertia during load variations, achieving effective frequency oscillation suppression while inherently lacking global system coordination capability due to its decentralized architecture.
The remainder of this paper is structured as follows:
Section 2 presents the small-signal modeling method of the multi-VSG parallel system, establishing the theoretical foundation for the proposed control strategy.
Section 3 introduces the distributed virtual inertia control strategy based on neighbor communication, describing its fundamental principles and implementation details.
Section 4 provides a rigorous stability analysis for the proposed strategy, utilizing the Lyapunov energy function method.
Section 5 demonstrates the effectiveness and advantages of the proposed strategy through comprehensive simulation studies in MATLAB/Simulink, including performance comparisons under various scenarios. Finally,
Section 6 summarizes the main findings and conclusions of this research.
2. Small-Signal Modeling of Multi-Virtual Synchronous Machine (VSG) Parallel System
2.1. Virtual Synchronous Generator (VSG) Parallel System
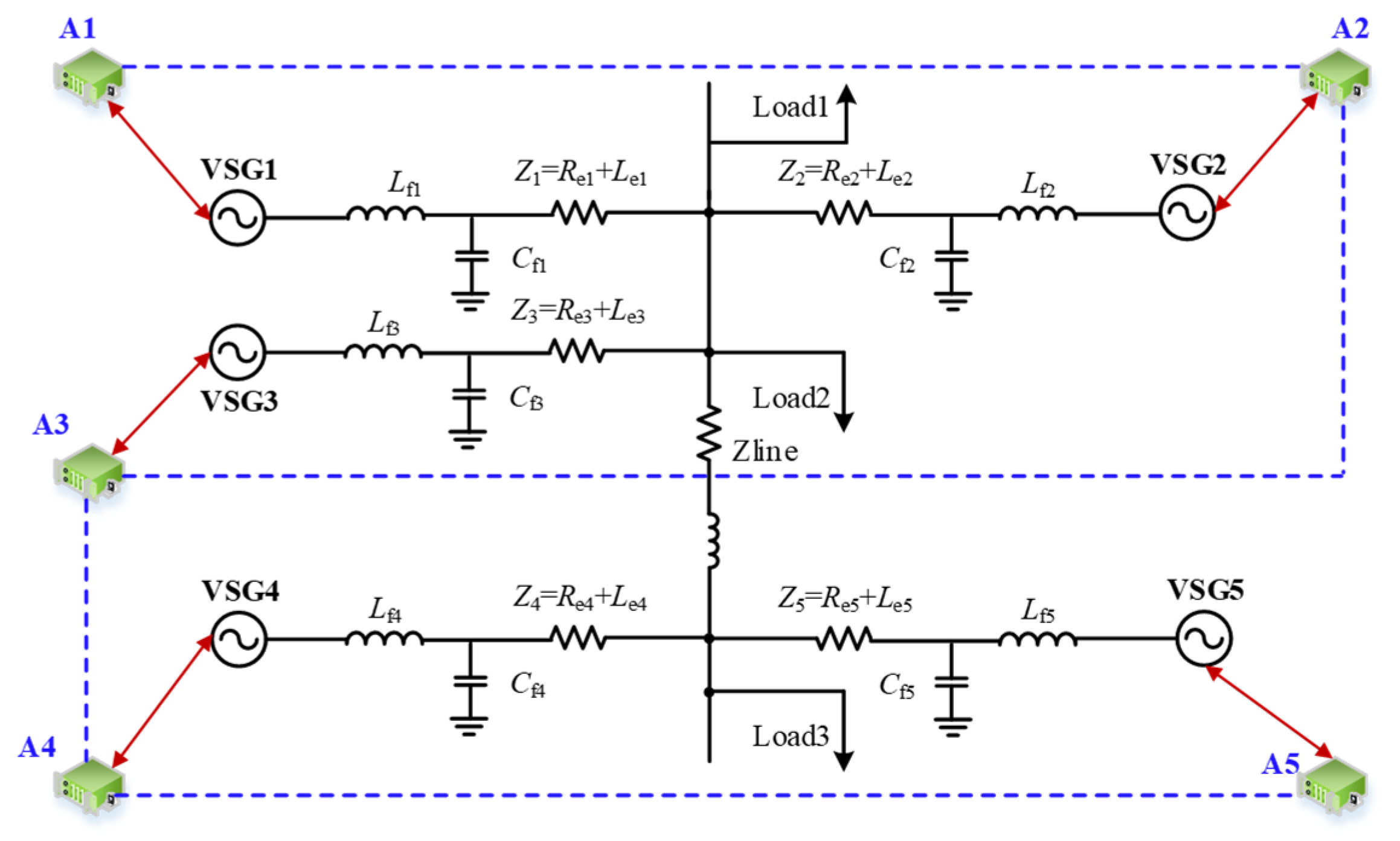
The multi-machine parallel system based on VSG technology adopts a common bus parallel architecture, as illustrated in
Figure 1. In this system,
N VSG units (
i = 1, 2, …,
N) operate in parallel on an AC bus through distributed connection lines. The output terminal of each VSG unit is connected to the point of common coupling via an equivalent impedance. The output currents
Ii of all VSG units are vectorially summed at the PCC, forming the total system current as
Itotal = ∑
Ii.
In a multi-VSG parallel system, uIabci and iIabci represent the port output voltage and output current of the ith VSG unit, respectively, while uabci and iabci denote the filtered output voltage and current after passing through the LC filter. The parameters Li and Ci correspond to the filter inductance and capacitance of the ith VSG unit, which are designed to suppress high-frequency harmonic components and improve power quality. Rline,i and Lline,i represent the equivalent resistance and inductance of the transformer and transmission line between the output terminal of the ith VSG unit and the point of common coupling (PCC), which significantly impact power flow distribution and system stability. Additionally, Rload and Lload denote the equivalent resistance and inductance of the load, determining the overall impedance characteristics of the system. The PCC voltage Upcc serves as a critical indicator for evaluating the system’s voltage regulation capability and stability.
A typical control structure of a VSG is illustrated in
Figure 2. The control strategy primarily consists of power calculation, active power–frequency control, voltage–current dual-loop control, and pulse width modulation technology. The power outer-loop control of the VSG comprises two critical components: the active power–frequency control for system frequency regulation and dynamic response enhancement and the reactive power–voltage control responsible for maintaining bus voltage stability and optimizing reactive power distribution. The VSG’s active power–frequency regulation is achieved by incorporating the rotor motion equation of synchronous generators, along with the
P-
ω droop control strategy. The rotor motion equation describes the inertia and damping characteristics of synchronous machines, with its mathematical formulation given in Equation (1). Simultaneously, the system’s mechanical power regulation is provided by the
ω-
P droop control strategy, and its mathematical expression is presented in Equation (2):
In this context, P0 and ω0 represent the reference power and reference angular frequency of the VSG under rated operating conditions, while PT and ω denote the mechanical power and actual output angular frequency during the VSG’s real-time operation. Kω is the active power–frequency droop coefficient of the VSG. The parameter J represents the virtual rotational inertia of the VSG, which reflects the system’s capability to respond to frequency disturbances, while D is the virtual damping coefficient, responsible for regulating the dynamic characteristics and stability of the system. Pe denotes the electromagnetic power output of the VSG, which is obtained by measuring the three-phase output voltage and current and performing active power calculations. Additionally, δ represents the phase angle of the VSG, Δω is the angular frequency deviation, and t denotes the system’s operational time.
The reactive power–voltage control of the VSG simulates the reactive voltage regulation characteristics of an exciter by introducing
Q-
U droop control. This reactive power–voltage control strategy can be specifically expressed by Equation (3):
where
U0 and
Q0 represent the terminal voltage and reactive power output of the VSG under rated operating conditions, respectively.
U and
Q denote the terminal voltage and reactive power output during actual operation, while
KQ is the reactive power droop coefficient of the VSG.
2.2. VSG Parallel System Small-Signal Modeling
Based on the topology of the multi-VSG parallel system, small-signal modeling was conducted. Considering that the dq reference coordinate systems of different VSGs are not identical, one VSG unit’s coordinate system was selected as the reference coordinate system DQ. The coordinate systems of the other VSG units were then transformed into this reference frame. The coordinate transformation from the dq axis to the DQ axis is illustrated in
Figure 3. The transformation process of the rotating dq coordinate system of the
ith VSG unit to the reference DQ coordinate system is expressed as:
The small-signal model corresponding to Equation (4) is expressed as:
The inverse transformation process from the reference DQ coordinate system to the rotating dq coordinate system of the
ith VSG unit is expressed as:
The small-signal model corresponding to Equation (6) is expressed as:
Taking the rotating coordinate system of the first VSG unit as the reference coordinate system, the phase angle difference between the other VSG units and the first VSG unit is expressed as:
The small-signal model after processing Equation (8) is expressed as:
The power control loop of the VSG consists of a power calculation, as well as active power–frequency control and reactive power–voltage control in VSG regulation. The power calculation process is expressed by Equation (10), and its linearized form is given by Equation (11). The implementation of the VSG control strategy is represented by Equations (1)–(3), while its linearized form is expressed by Equation (12):
In the equation,
P and
Q represent the average active power and reactive power, respectively.
ud and
uq denote the output voltages of the inverter transformed to the d-axis and q-axis through the park transformation.
id and
iq are the output currents of the inverter in the d-axis and q-axis, respectively:
Considering that the dual-loop voltage and current control has fast response and high accuracy, small-signal modeling of the voltage and current loops was not performed. It was assumed that the reference voltage output from the power control loop is approximately equal to the modulation voltage output from the voltage and current control loops, which is also approximately equal to the output voltage of the VSG unit.
The rationale behind this simplification lies in the fact that the inner control loops are typically designed with high-bandwidth controllers (often in the kilohertz range), which enables them to respond almost instantaneously. Compared to the outer-loop dynamics of power and frequency control, which typically operate at frequencies of a few hertz, the inner loops can be regarded as being in a quasi-steady-state.
Moreover, the main focus of this study is on the analysis and suppression of frequency oscillations and active power dynamics, which predominantly occur in the low- to mid-frequency range. Within this frequency range, the influence of the voltage and current inner control loops on system-level stability is relatively limited. Therefore, to simplify the modeling process and concentrate on the dominant dynamics related to the control objectives, the inner loops were omitted from the small-signal model.
Nevertheless, to ensure that the essential electromagnetic dynamics between the converter and the external grid/load were preserved, the differential equations of the LC output filter were explicitly incorporated into the state–space model (see Equation (13)). This allowed for an accurate representation of the dynamic behavior at the converter output interface:
The mathematical model of the line impedance is expressed as:
Considering an RL load as a typical load in a microgrid, the mathematical model representing the connection from the PCC to the load is expressed as:
In the equation, iloadDQ represents the current flowing through the RL load in the DQ reference coordinate system.
By combining Equations (9) and (11)–(15), the state variable matrix for a single VSG is defined as Δ
xi, which is expressed as:
where the state variable matrix for multiple VSGs, Δ
xsys, is expressed as:
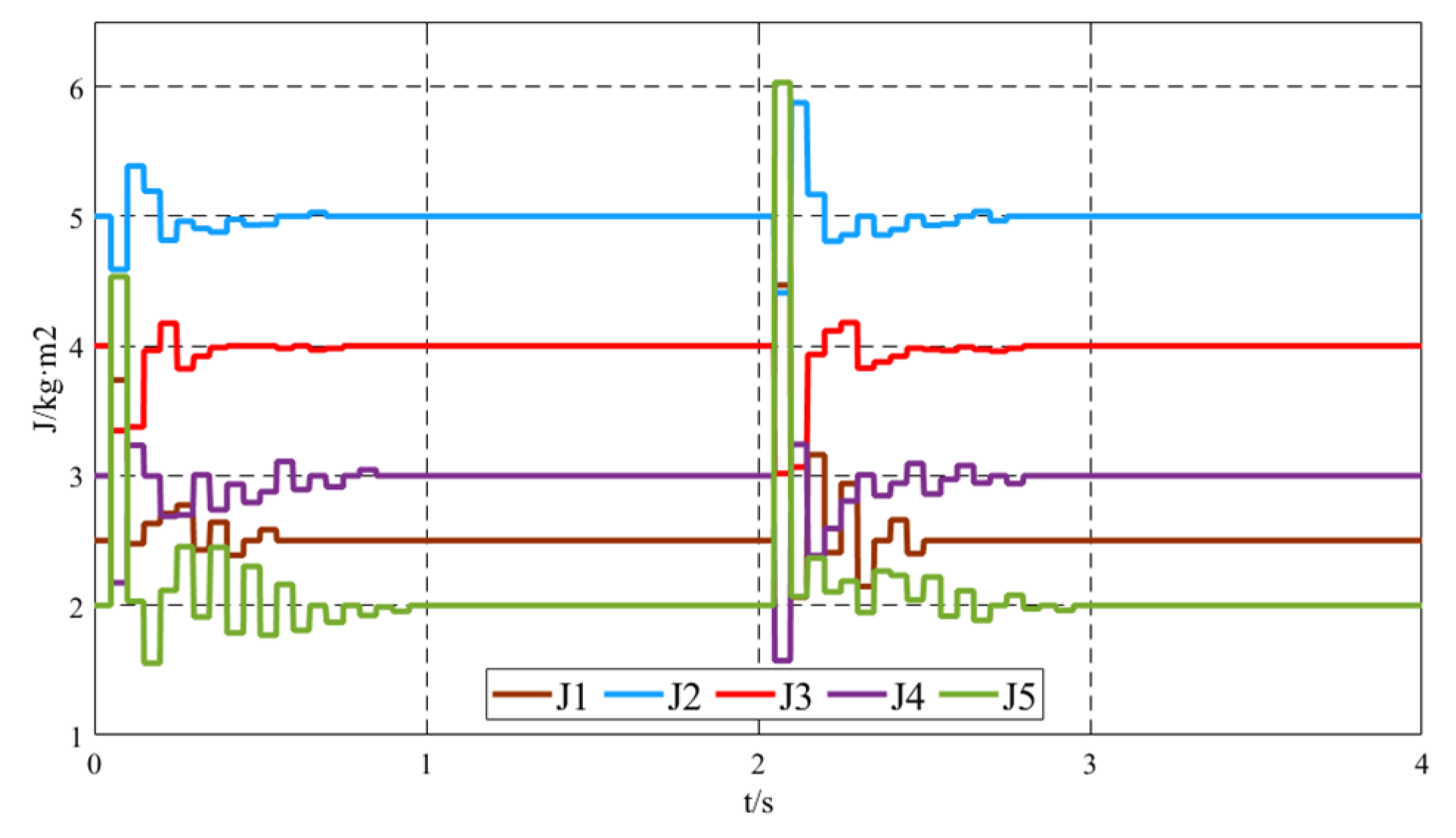
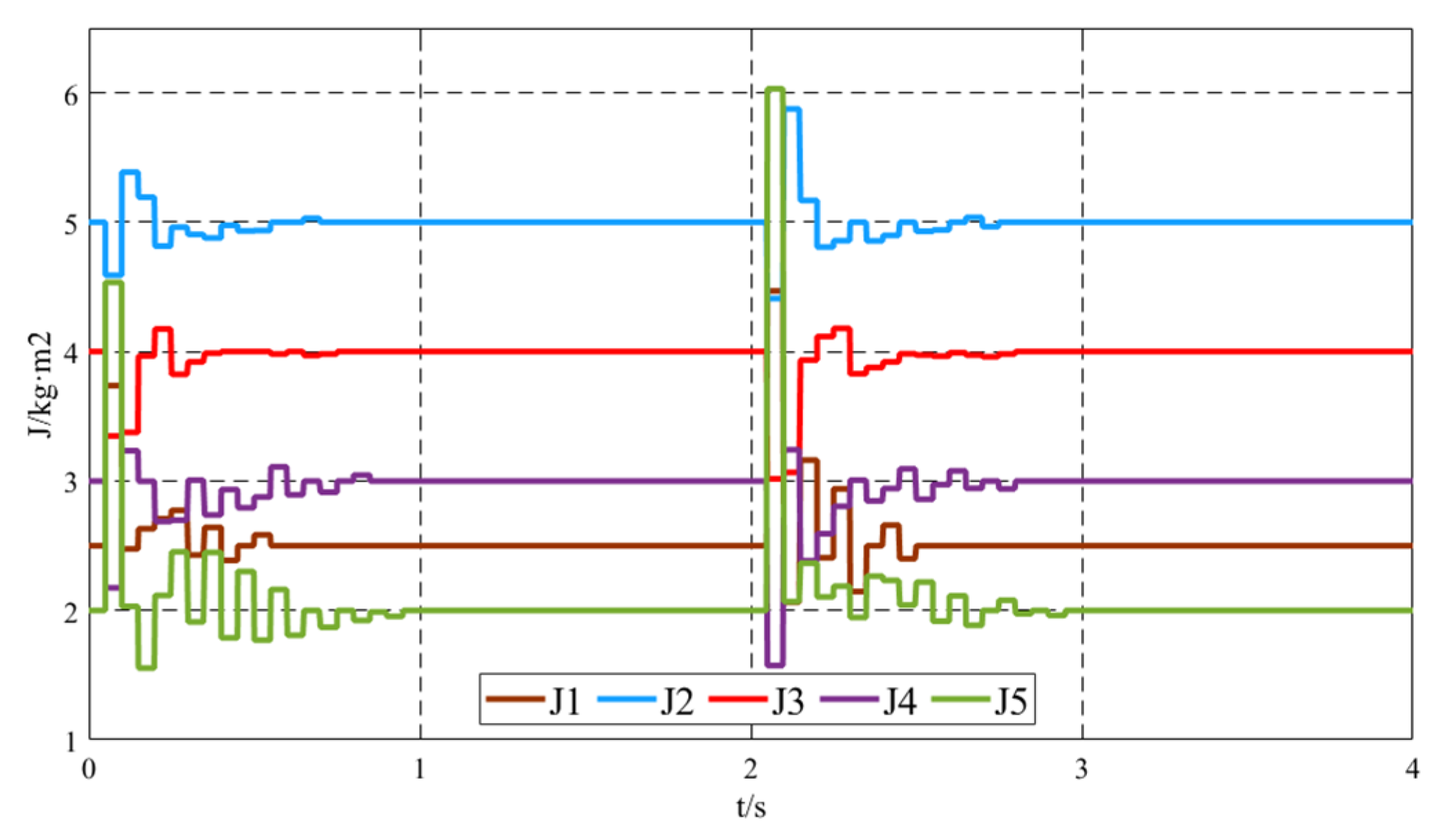
For a VSG parallel system with i = 5, all eigenvalues of the five-VSG parallel system under this operating condition are located in the left half-plane of the coordinate system, indicating that the system is stable under small disturbances.
The small-signal model developed in this section provides a detailed state–space representation of the multi-VSG parallel system, incorporating the control loops, power circuit components, and inter-unit coupling. This model serves as a theoretical foundation for analyzing the system’s dynamic behavior and forms the structural basis for the subsequent control design. In the next section, a distributed virtual inertia control strategy is proposed, building upon the modeled dynamics to enhance frequency coordination and suppress oscillations in a fully decentralized manner.
3. Distributed Virtual Inertia Control Strategy
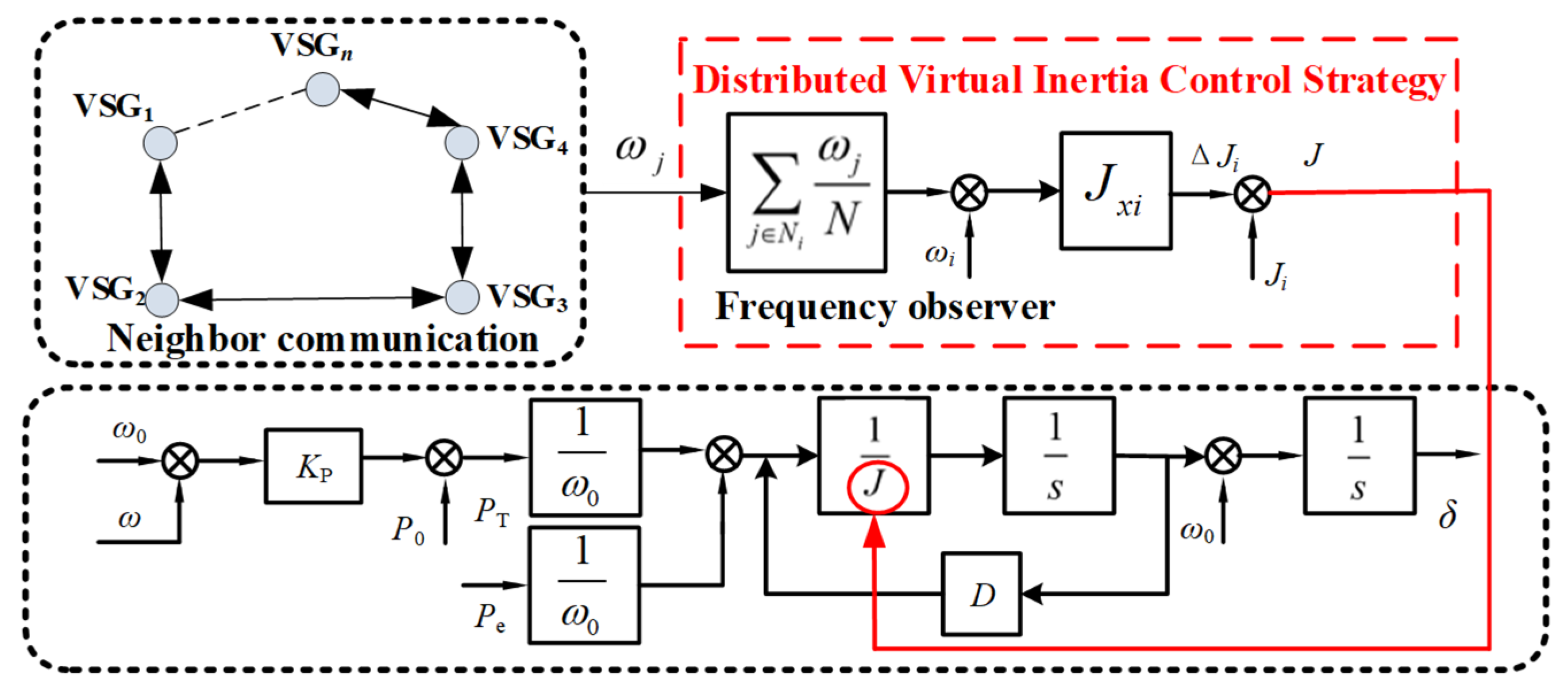
This paper proposes a distributed virtual inertia control strategy based on neighbor communication. By leveraging neighbor communication, quasi-global sharing of frequency information is achieved, allowing the introduction of an additional inertia term to adjust the virtual inertia of the local VSG. This helps suppress frequency oscillations after disturbances. The control block diagram is shown in
Figure 4.
By introducing an additional inertia term, the improved rotor motion equation is expressed as Equation (18):
In the equation, Ji represents the virtual inertia of the ith VSG (virtual synchronous generator) unit in the system, and ΔJi denotes the introduced additional inertia term. Jxi is defined as the additional inertia coefficient of the ith VSG, ωi is the angular frequency of the ith VSG, and is the reference value of the angular frequency of the ith VSG obtained through neighbor information interaction. The function sign is the sign function, which takes the value 1 when dωi/dt > 0, 0 when dωi/dt = 0, and −1 when dωi/dt < 0. By adjusting the additional inertia term ΔJi, the virtual inertia of the ith VSG can be modified, thereby altering dωi/dt to achieve frequency oscillation suppression.
In a multi-VSG parallel system, if each VSG aims to obtain an accurate reference value of angular frequency for local computation of the additional inertia term, it is necessary to acquire the angular frequency variations of neighboring VSGs in real time. To achieve this goal, sensors were typically deployed in the system to observe the angular frequency of each VSG. These sensors can measure the angular frequency ωi of each VSG in real time and transmit the data to the distributed control network.
To improve the dynamic performance during the frequency variation process, a distributed frequency state observer based on neighbor communication was designed within the additional inertia control strategy, as shown in Equation (19). This observer utilizes the angular frequency data collected by the sensors, combined with communication between neighboring VSGs, to dynamically estimate the reference angular frequency
for each VSG:
In the equation, ωj represents the output angular frequency of the jth VSG adjacent to the ith VSG, Ni denotes the set of neighbors defined for the ith VSG, and N represents the number of neighbors of the ith VSG.
Considering the neighbor communication architecture, which does not require a central control node and only relies on the exchange of angular frequency information obtained from sensors among VSGs, the angular frequency of each unit in the system can converge to a consistent value. This architecture has low requirements for communication and computational resources, requiring only minimal communication costs to observe and process the angular frequency information of neighboring VSGs. To achieve the observation of angular frequencies for multiple VSG units adjacent to the local VSG, this study ensured that the communication topology in the neighbor communication framework aligned with the physical topology of the actual multi-VSG system, where the angular frequency information is directly sourced from sensors. By integrating real-time data collected by sensors with neighbor communication, the system can achieve efficient and distributed frequency synchronization and control.
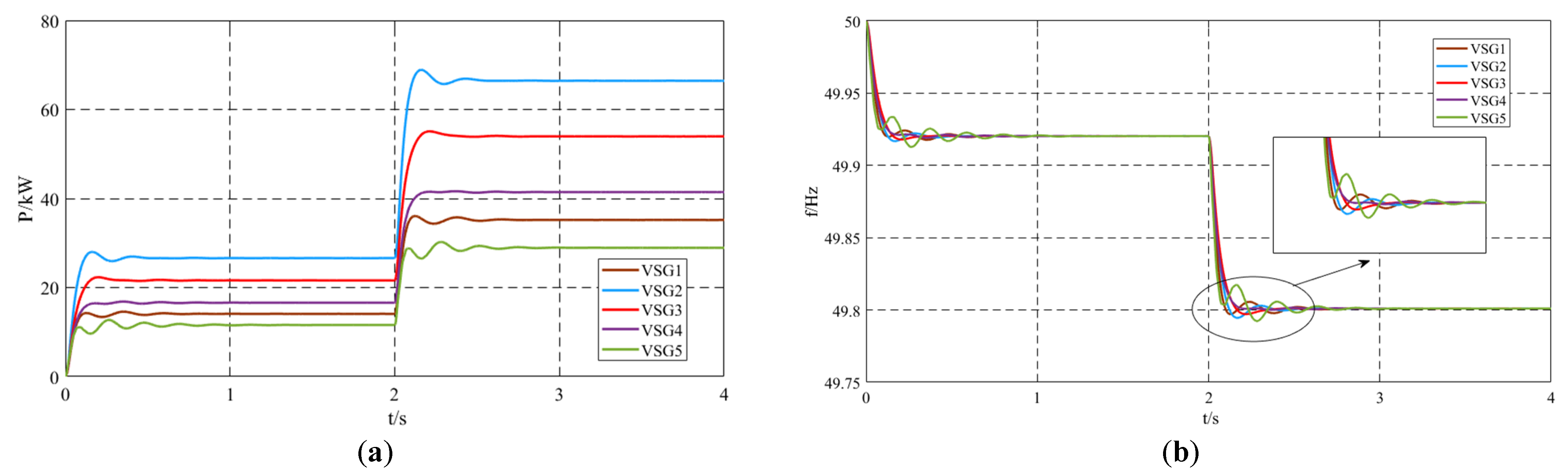
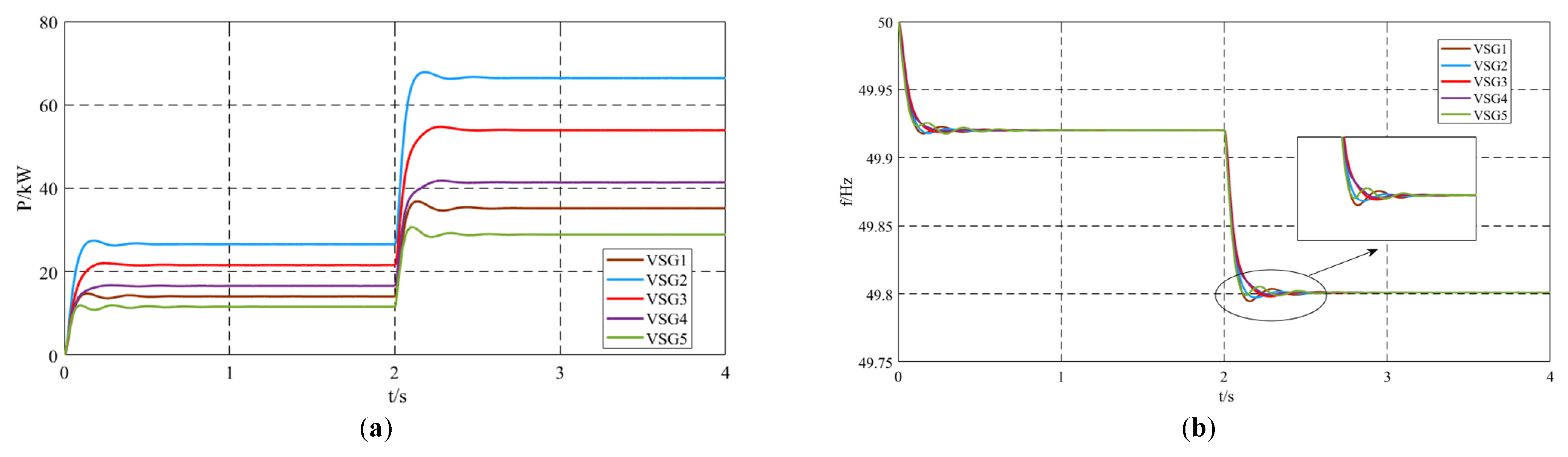
When a new load is connected to a multi-VSG parallel system during steady-state operation, the changes in the local angular frequency ωi, the average neighbor angular frequency , the rate of change of angular frequency dωi/dt, and the virtual inertia Ji of the ith unit over an oscillation cycle can be divided into the following four stages:
Stage I: The local angular frequency ωi and the average neighbor angular frequency satisfy ωi < and dωi/dt < 0. To ensure that the output angular frequencies of all VSG units converge to a consistent value, the virtual inertia Ji is increased to constrain the rate of change of angular frequency dωi/dt. As a result, the local angular frequency ωi increases compared to the case without control, the absolute deviation |Δωi| decreases compared to the case without control, and ωi moves closer to the average neighbor angular frequency .
Stage II: The local angular frequency ωi and the average neighbor angular frequency satisfy ωi < and dωi/dt > 0. To ensure that the output angular frequencies of all VSG units converge to a consistent value, the virtual inertia Ji is decreased to increase the rate of change of angular frequency dωi/dt. As a result, the local angular frequency ωi increases compared to the case without control, the absolute deviation |Δωi| decreases compared to the case without control, and ωi moves closer to the average neighbor angular frequency .
Stage III: The local angular frequency ωi and the average neighbor angular frequency satisfy ωi > and dωi/dt > 0. To ensure that the output angular frequencies of all VSG units converge to a consistent value, the virtual inertia Ji is increased to reduce the rate of change of angular frequency dωi/dt. As a result, the local angular frequency ωi decreases compared to the case without control, moving closer to the average neighbor angular frequency .
Stage IV: The local angular frequency ωi and the average neighbor angular frequency satisfy ωi > and dωi/dt < 0. To ensure that the output angular frequencies of all VSG units converge to a consistent value, the virtual inertia Ji is decreased to increase the rate of change of angular frequency dωi/dt. As a result, the local angular frequency ωi decreases compared to the case without control, moving closer to the average neighbor angular frequency .
After the system is subjected to a disturbance, a repeated oscillatory decay process occurs. Each oscillation cycle repeats the aforementioned four stages. During the disturbance process of the system, the proposed control strategy can take effect in all oscillatory decay processes, thereby effectively suppressing frequency oscillations.
4. Stability Analysis of the System Using the Energy Function Method
For an n-VSG parallel system, where each VSG is equivalent to a PV node, the active power output of the
ith VSG is given by:
Assuming
δi −
δj ≈ 0,and cos
δij ≈ 1, and defining the initial value of the output power as
Pei0, Equation (20) can be expressed as Equation (21):
Substituting Equation (21) into Equation (18) yields:
According to the Lyapunov stability theorem, the energy function
V(
δ,
ω) =
Ek +
Ep is constructed, where
Ek represents the kinetic energy of the system and
Ep represents the potential energy of the system, as specifically shown in Equation (23):
The constructed Lyapunov energy function V(δ, ω) = Ek + Ep includes two distinct energy components with clear physical meanings. Specifically, Ek represents the kinetic energy stored in the rotating mass of the virtual synchronous generator, reflecting the mechanical-like inertia characteristic of the system, which is analogous to the rotor kinetic energy of a traditional synchronous machine. On the other hand, Ep corresponds to the potential energy associated with electromagnetic interactions and power exchanges between the VSG units and the electrical network, representing the electromagnetic energy stored due to phase-angle deviations from the equilibrium point. Thus, the decrease in the total energy V(δ, ω) over time ensures that the system oscillations decay, indicating stable system operation under the proposed control strategy.
The derivative of the energy function is expressed as Equation (24). From Equation (24), it can be concluded that the additional inertia control proposed in this paper is stable when the damping coefficient
Di is greater than 0. Moreover, during the steady-state operation of the system, the additional inertia term is Δ
Ji = 0. Therefore, the additional inertia control proposed in this paper does not affect the steady-state operation process and only suppresses frequency oscillations during transient processes:







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}