
A Compact High-Precision Cascade PID-Control Laser Driver for Airborne Coherent LiDAR Applications

 ,
,  ,
,
Abstract
1. Introduction
2. Principle
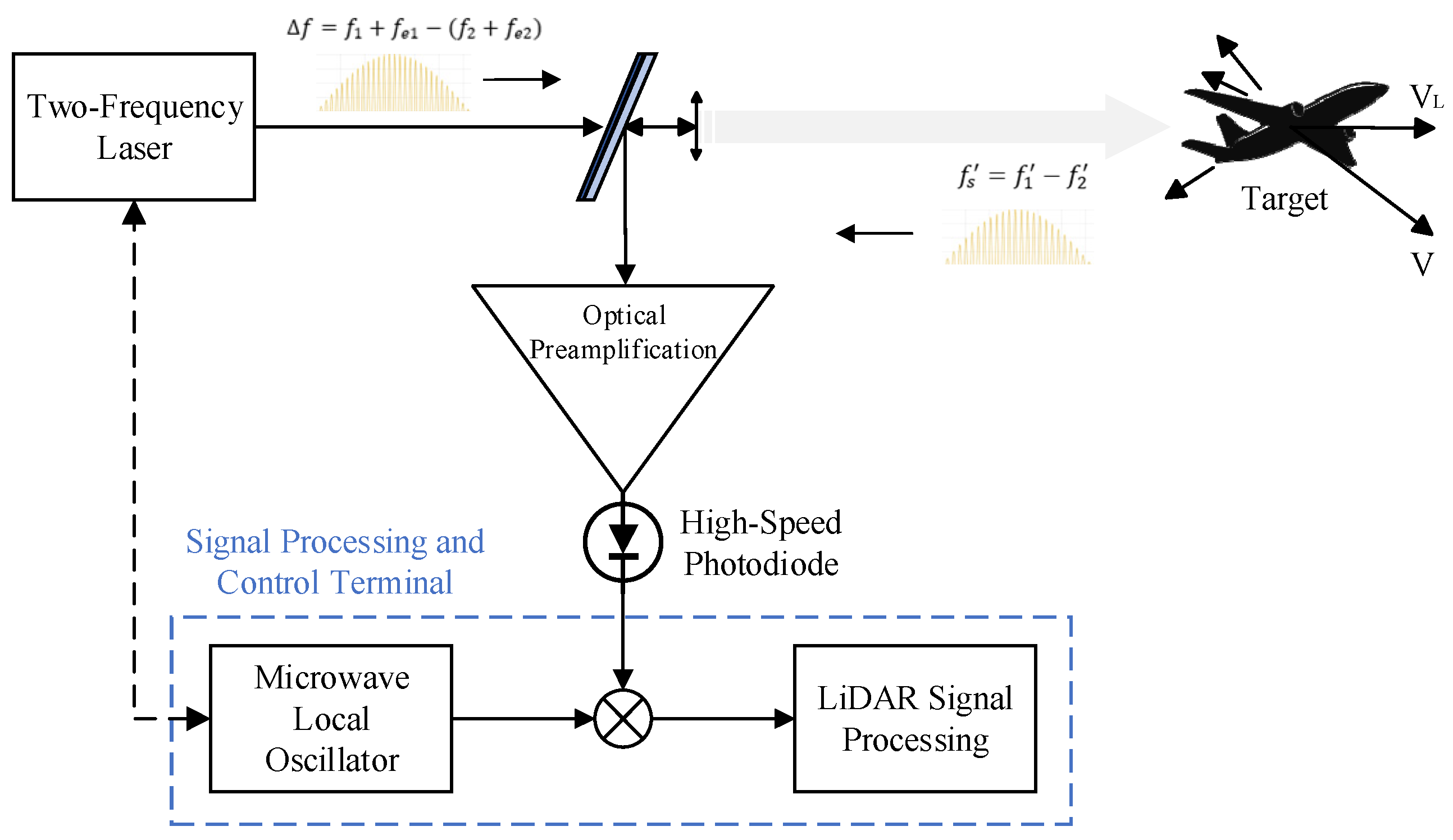
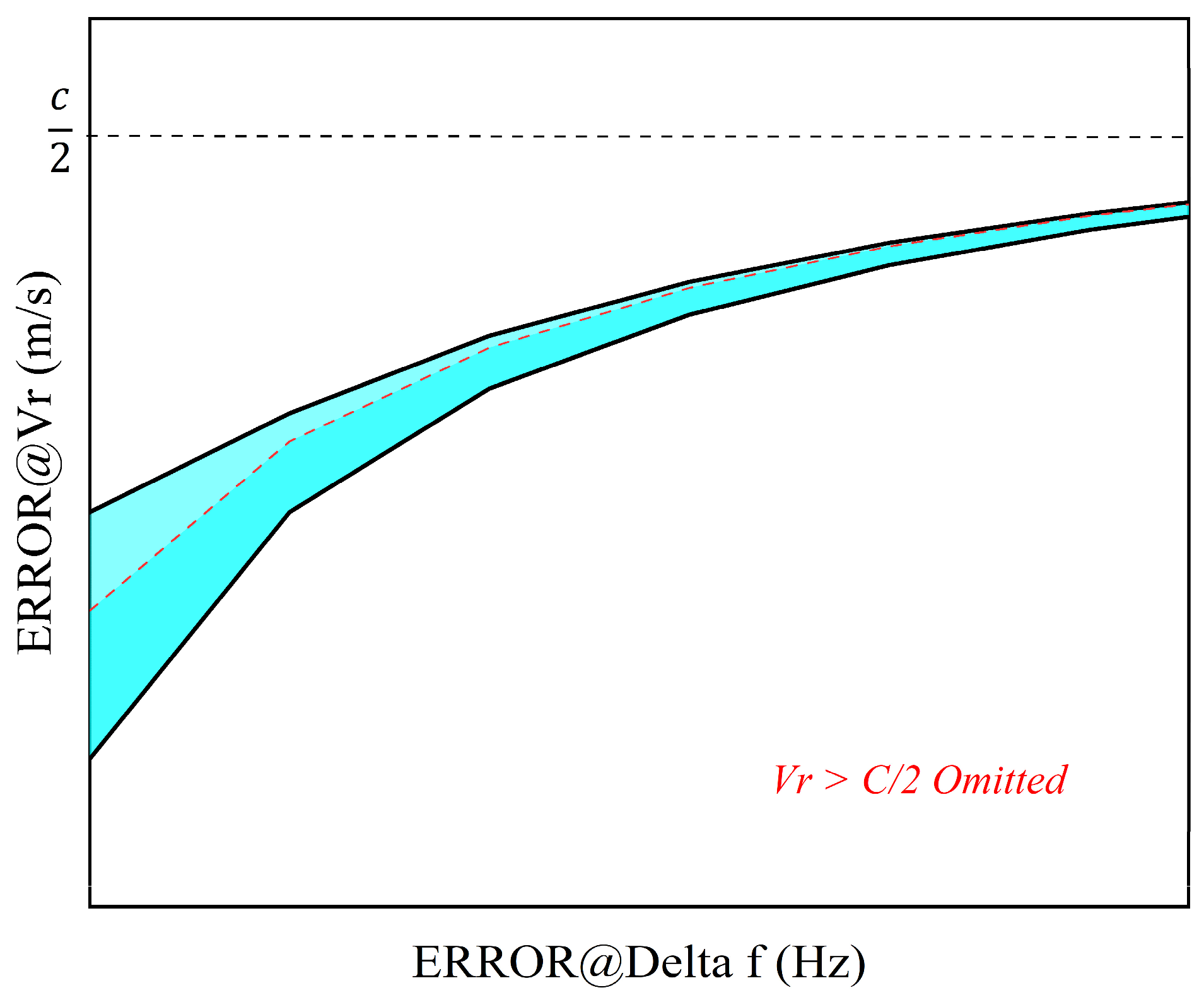
2.1. Airborne Coherent LiDAR Measurement Principle and Error Analysis
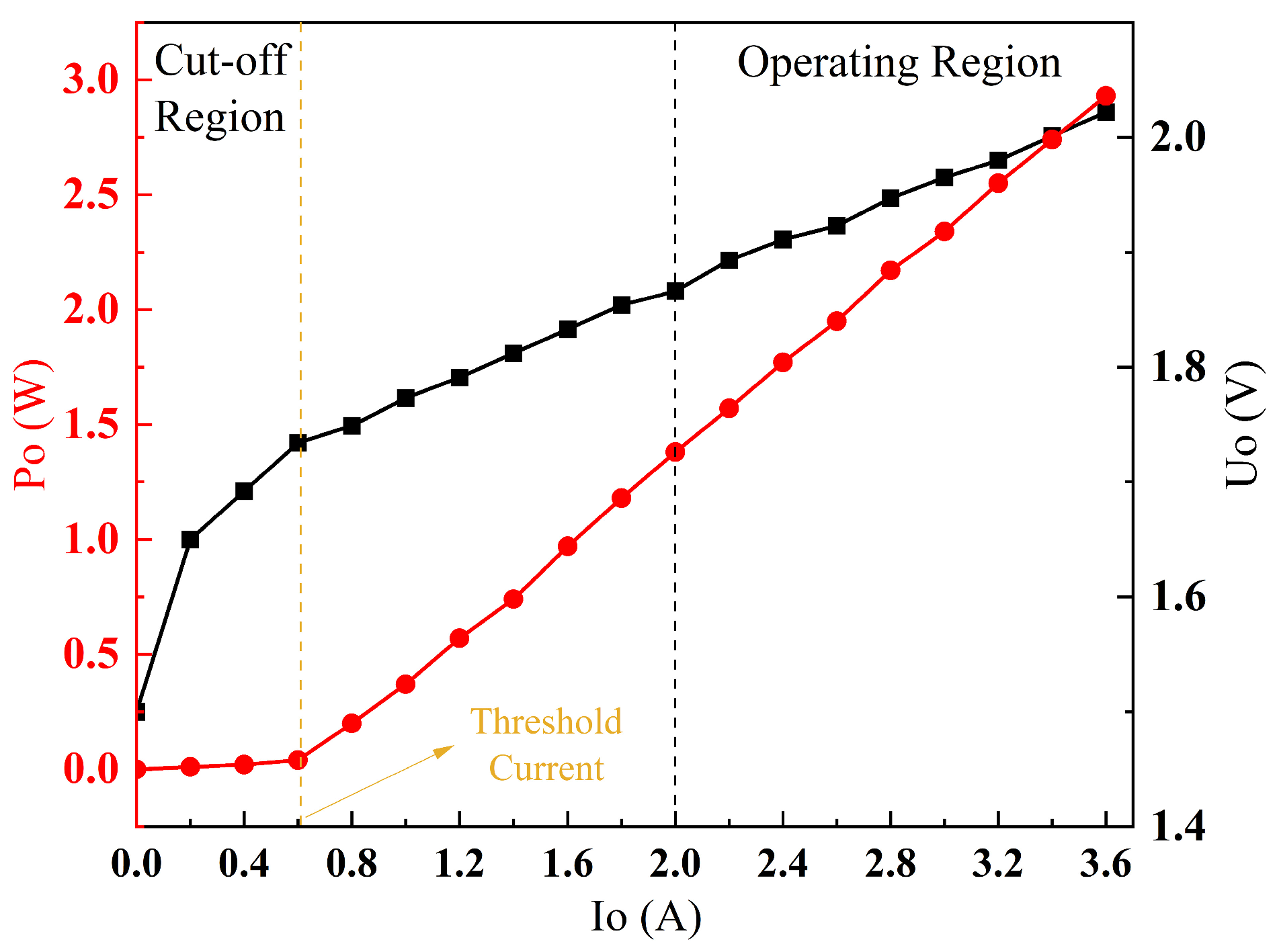
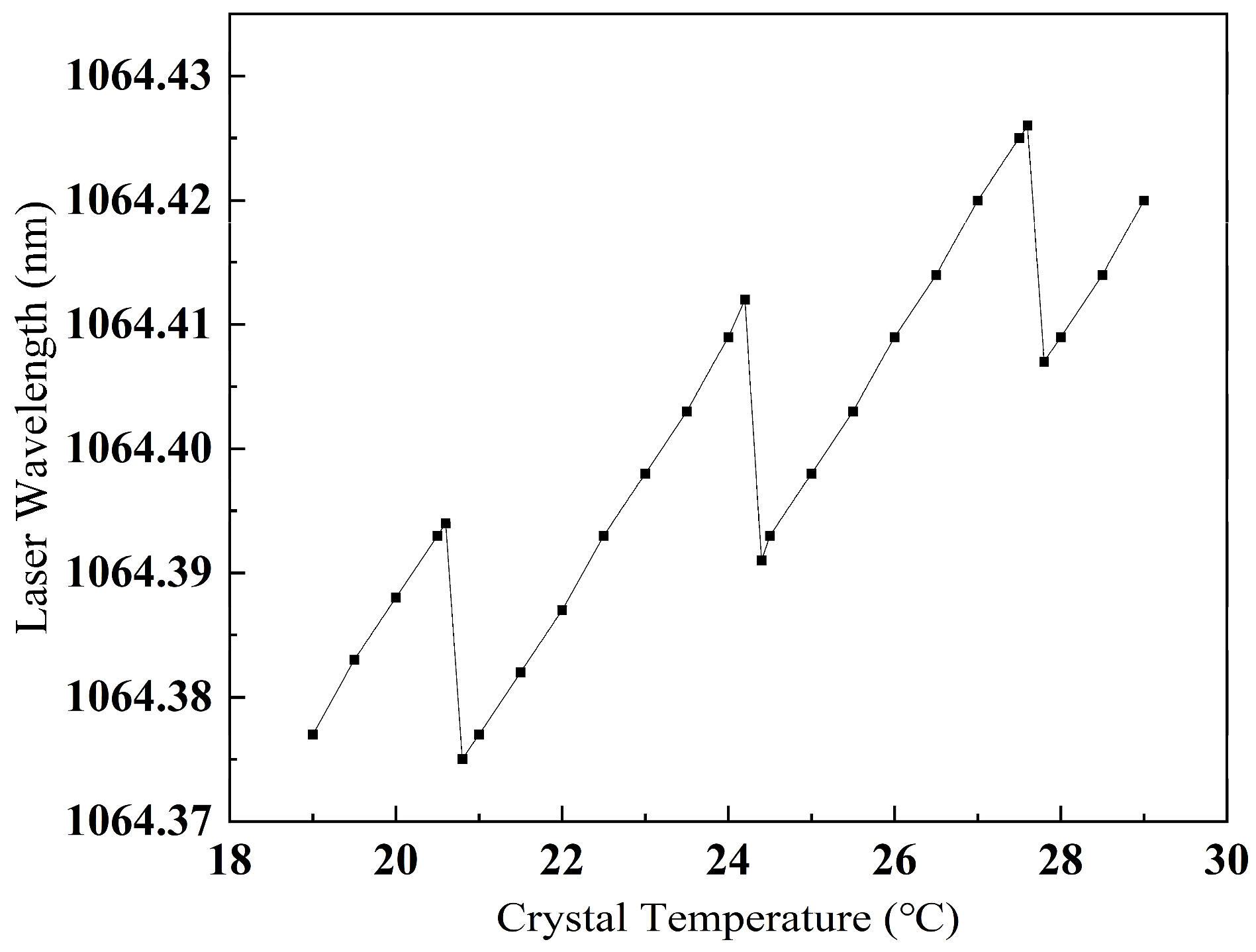
2.2. P–I–U and Temperature–Frequency Characteristics of the Laser
3. System Design
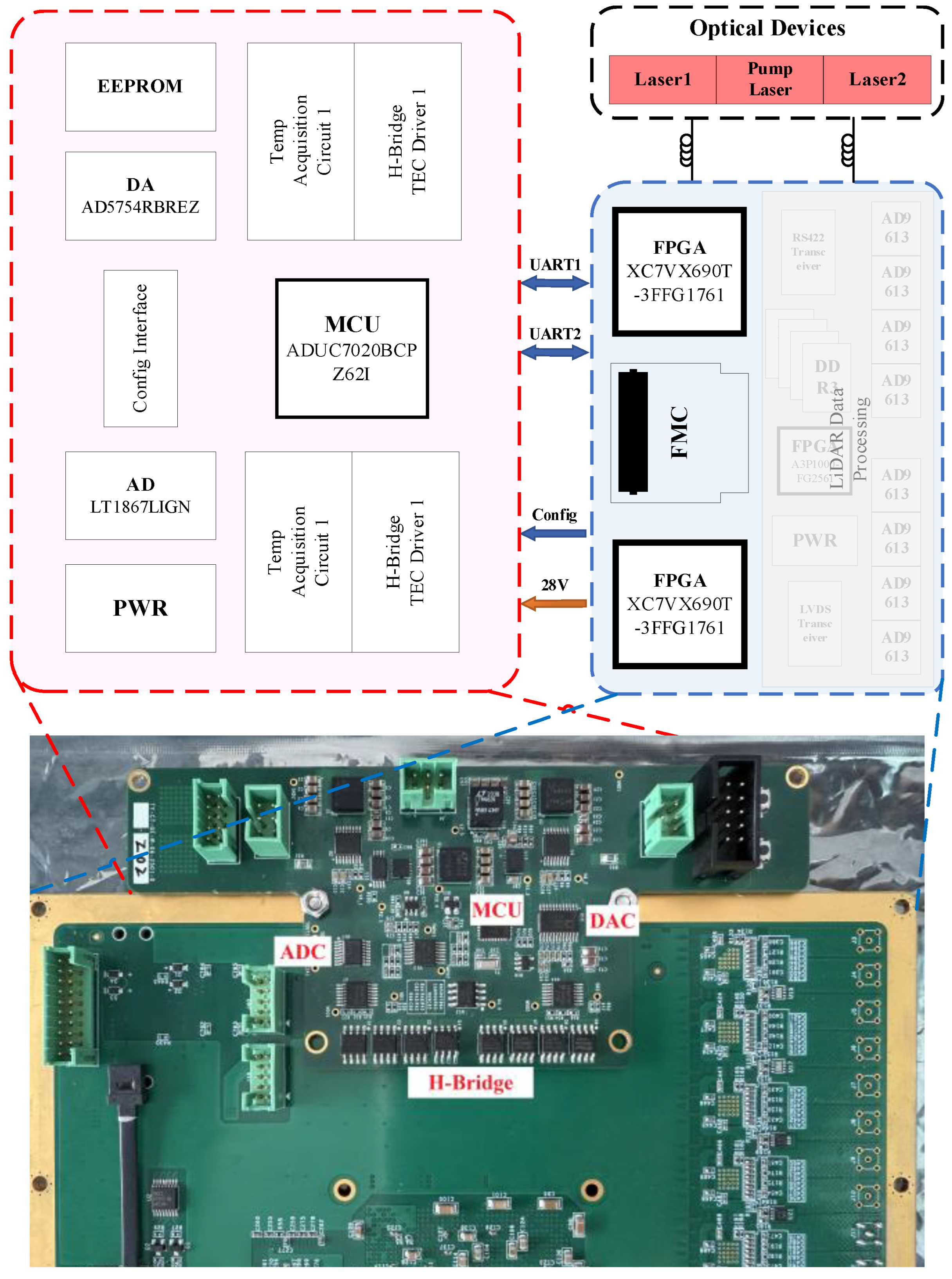
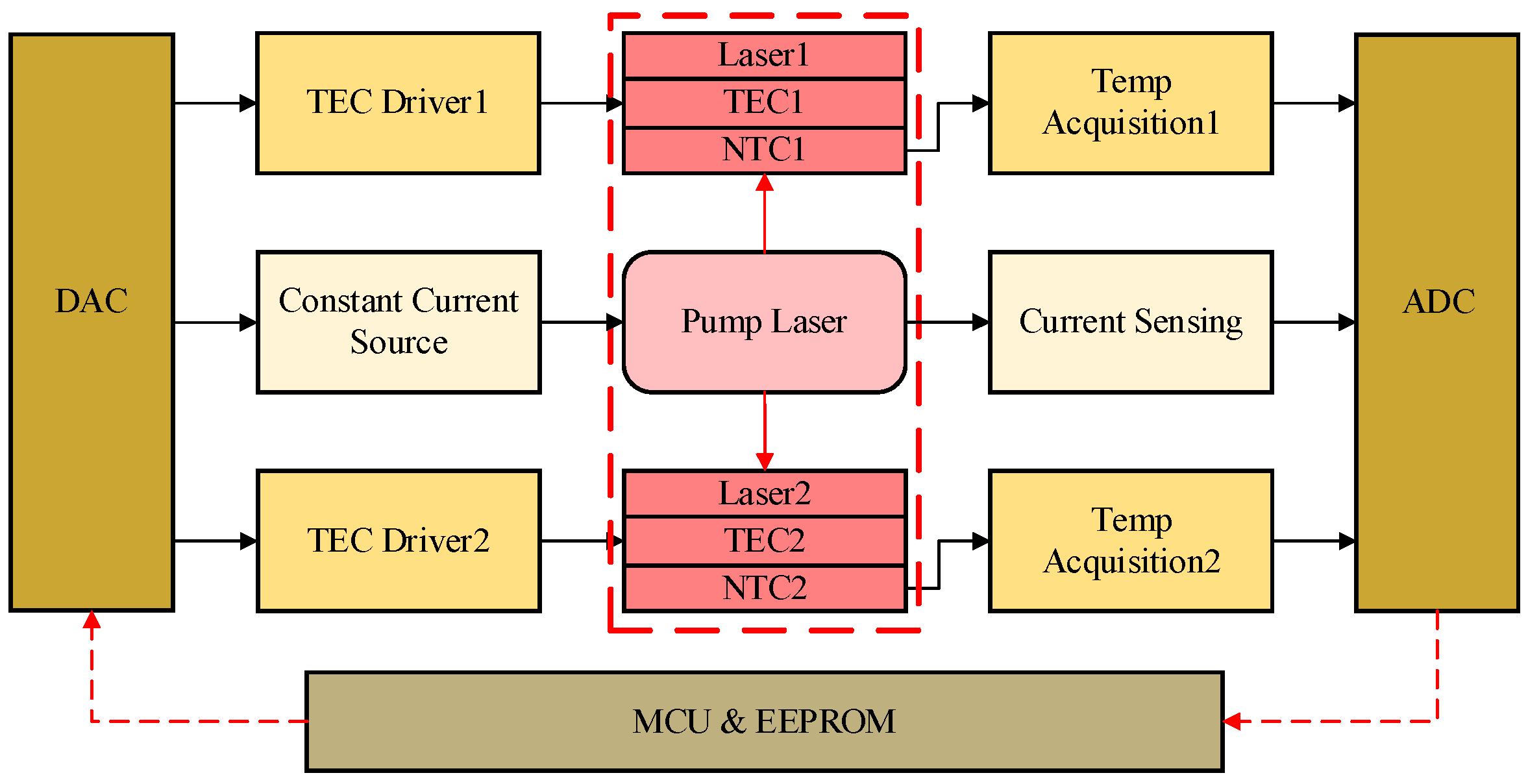
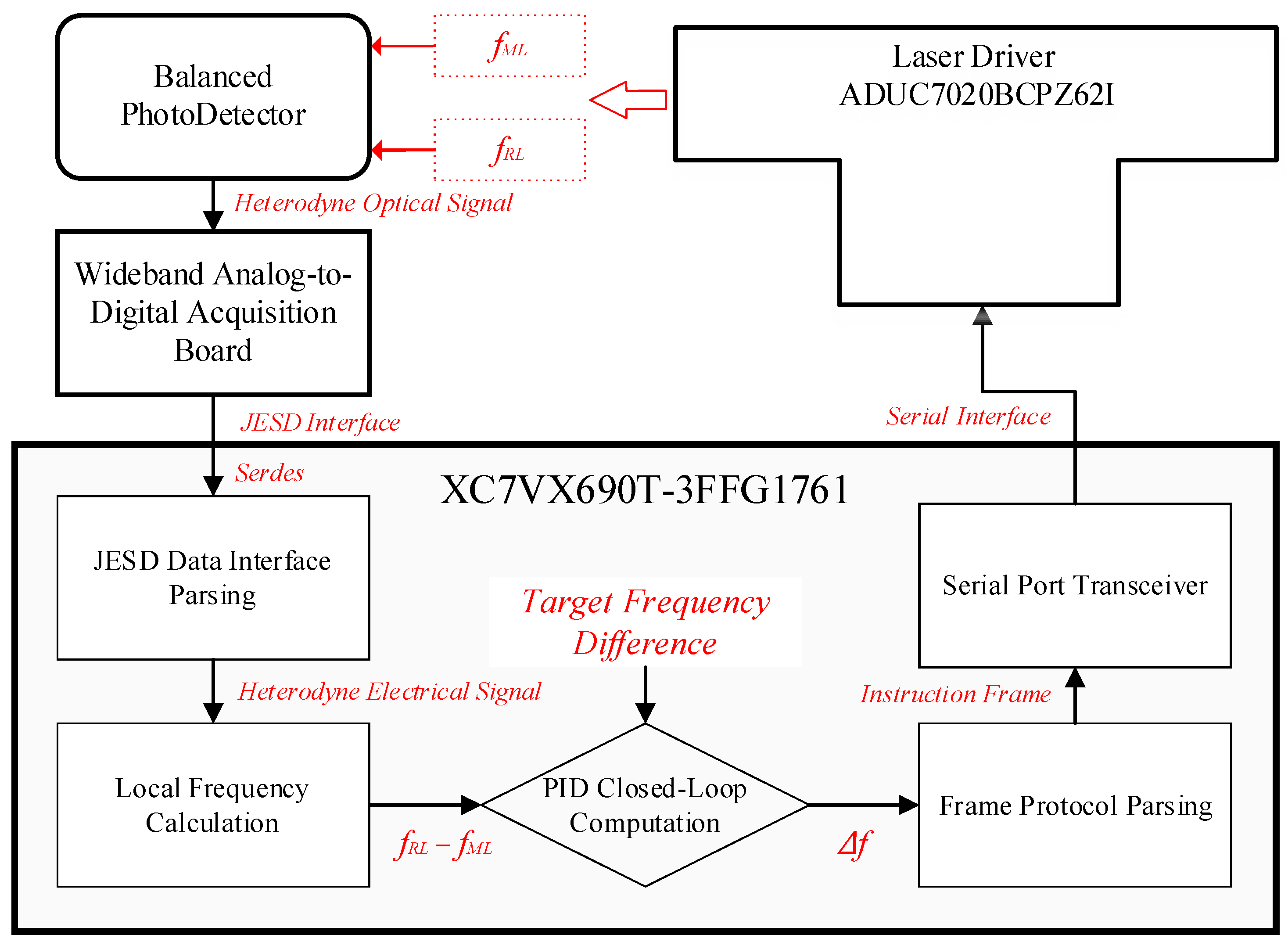
3.1. Overall Architecture
3.2. Hardware Implementations
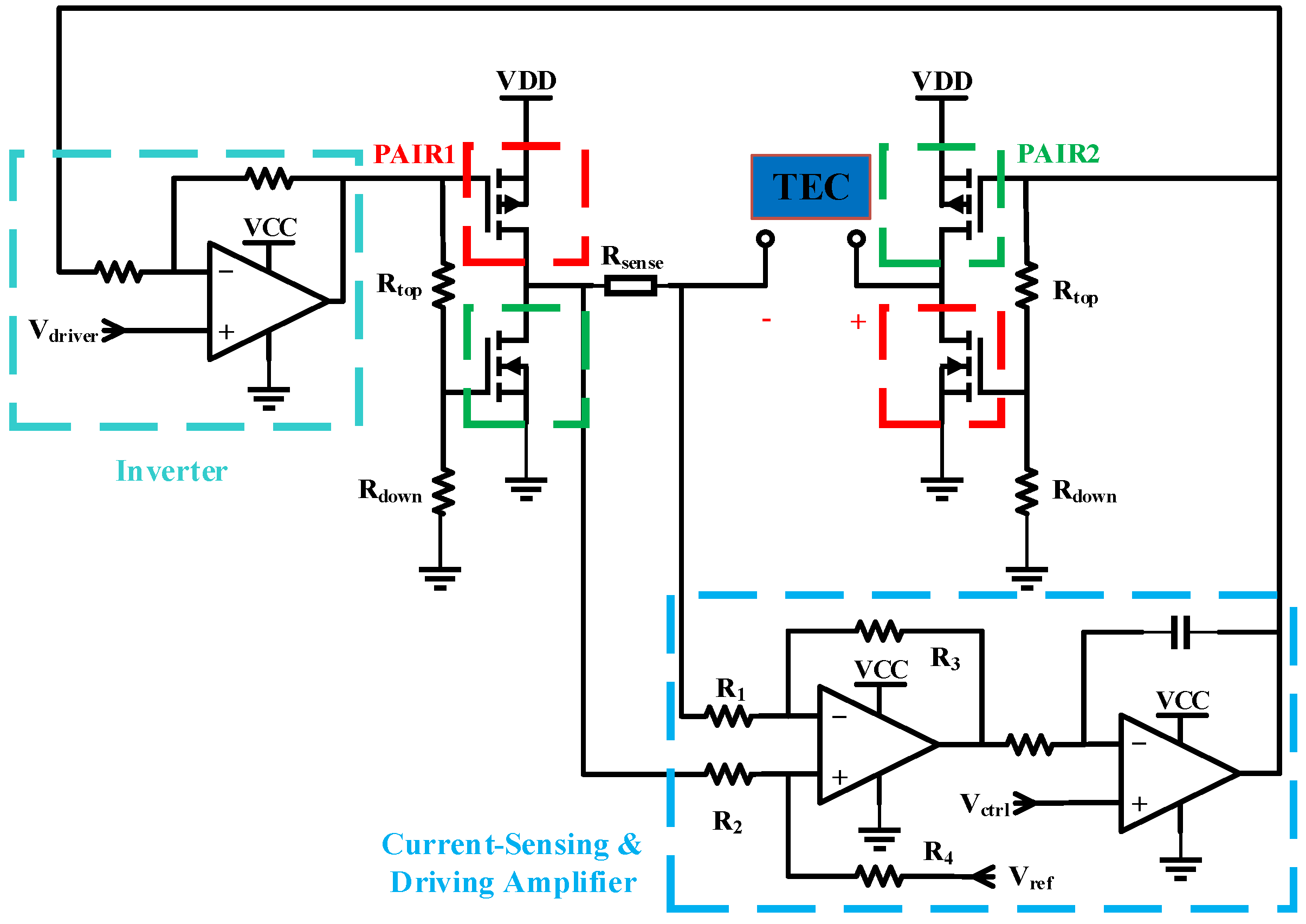
3.2.1. TEC Driver Circuit
3.2.2. Temperature Acquisition Circuit
3.2.3. Constant Current Source Circuit
3.3. Control Logic Implementations
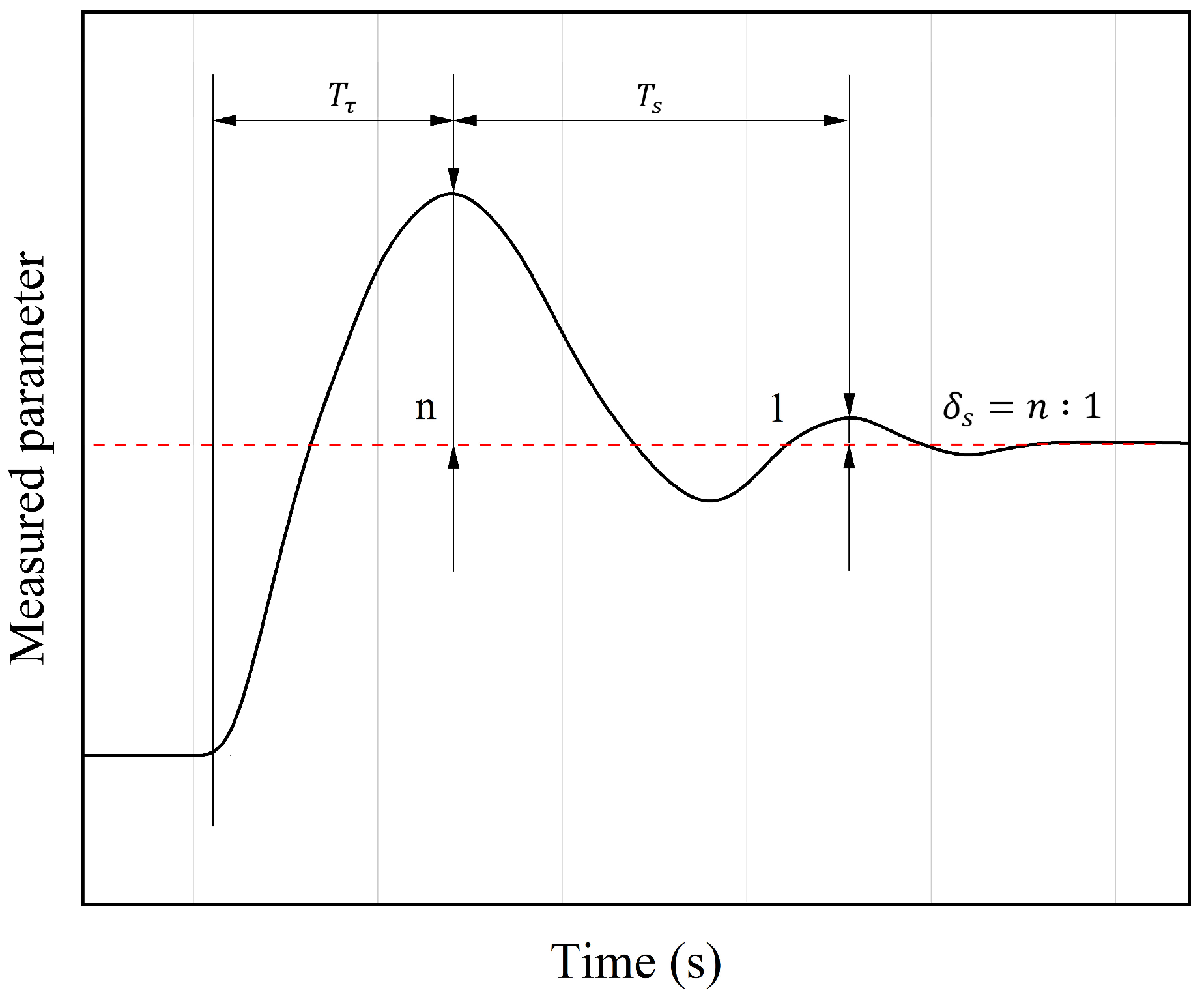
3.3.1. Cascade PID Control
- Set the integral time of both the primary controller (outer frequency loop) and secondary controller (inner resistance loop) to maximum and set the derivative time to zero; then, operate the cascade control system;
- Set the proportional band of the primary control to 100% scale and tune the secondary loop according to a specific damping ratio (commonly = 4:1 or 10:1). During tuning, gradually decrease the proportional of the secondary controller from a large value to determine the damping proportional band () and damping oscillation period () of the secondary controller;
- Fix , tune the primary loop by the same token to determine and ;
- Select the appropriate empirical formula based on the obtained values according to the chosen to calculate the PID parameters;
- Re-observe the cascade PID response to further fine-tune the parameters if necessary.
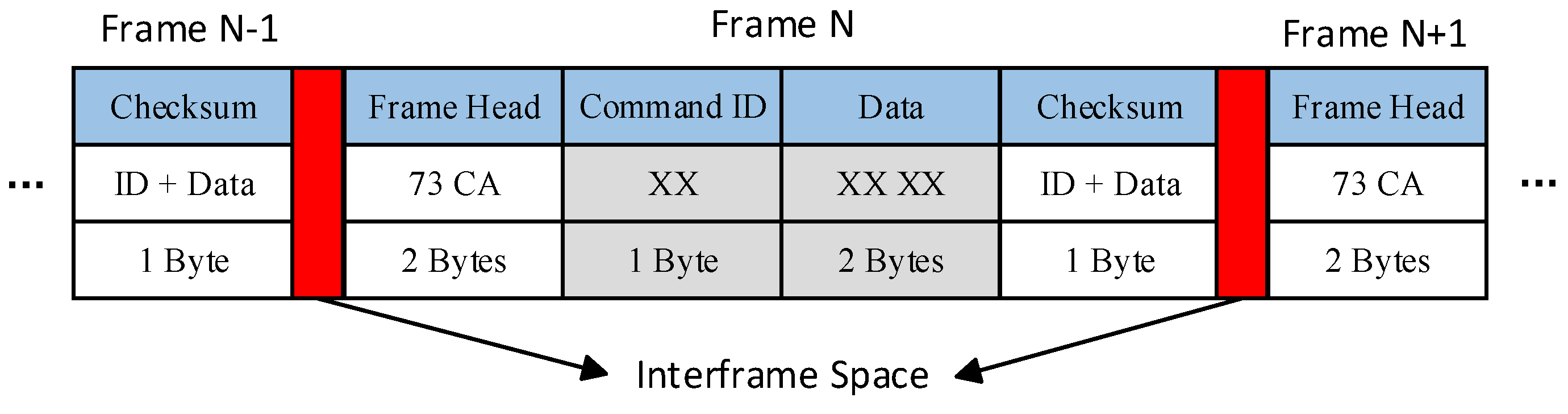
3.3.2. Control Link Implementation
- Frame Header: Marks the start of data transmission;
- ID Bit: Identifies the controlled parameter (TEC1/TEC2 temperatures, pump current, TEC current limit, control cycle, or other PID parameters);
- 2-Byte Data Field: Encapsulates specific control values;
- Checksum: Byte-wise sum of ID and data bits for transmit error detection.
4. Experimental Setup and Results
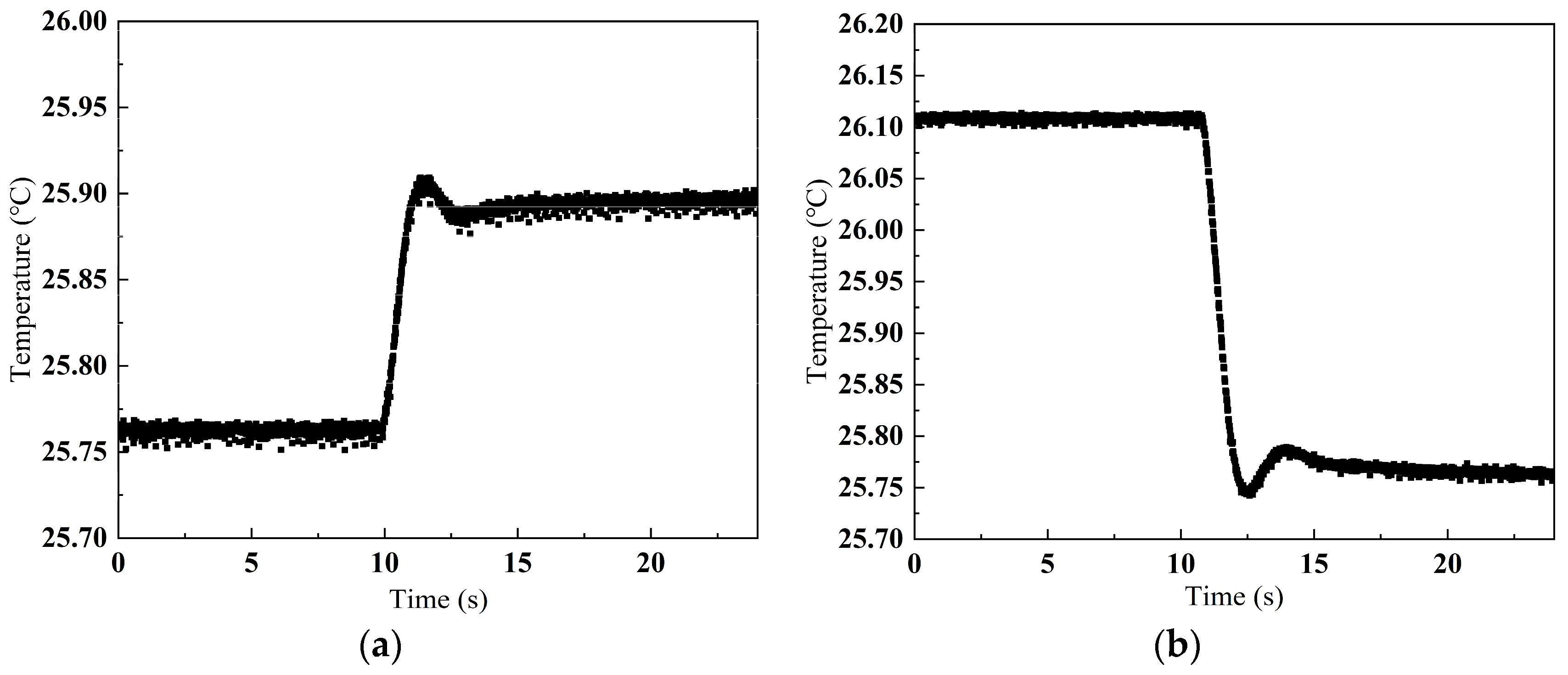
4.1. PID Response
- Cooling Phase: Initial setpoint = 25.76 °C. Post-command, the driver induced a controlled temperature decrease, stabilizing at 25.89 °C. Assuming linear temperature-data correlation, this ΔT ≈ 0.2 °C corresponded to a laser frequency tuning of ~400 MHz.
- Heating Phase: Subsequent setpoint = 26.11 °C. The driver then drove a temperature increase, stabilizing at 25.76 °C. With ΔT ≈ 0.4 °C, the frequency shift reached ~1 GHz.
- Stabilization Time: <4 s for both heating and cooling transitions
- System Response: Minimal overshoot (<0.03 °C) and low steady-state error
- Initial Stabilization:
- Starting frequency offset: ~45 MHz
- Post-control stabilization: ~24 MHz
- Observed behavior: Progressive frequency reduction with minimal transient oscillations.
- Post-PID Optimization (FPGA Parameters Tuned):
- Frequency stabilization time: <5 s
- System response: Slight overshoot and residual error.
- Stabilization Time: <5 s (post-PID parameter adjustment)
- Control Accuracy: <1 MHz steady-state error
- System Efficiency: >80% frequency offset reduction from initial state.
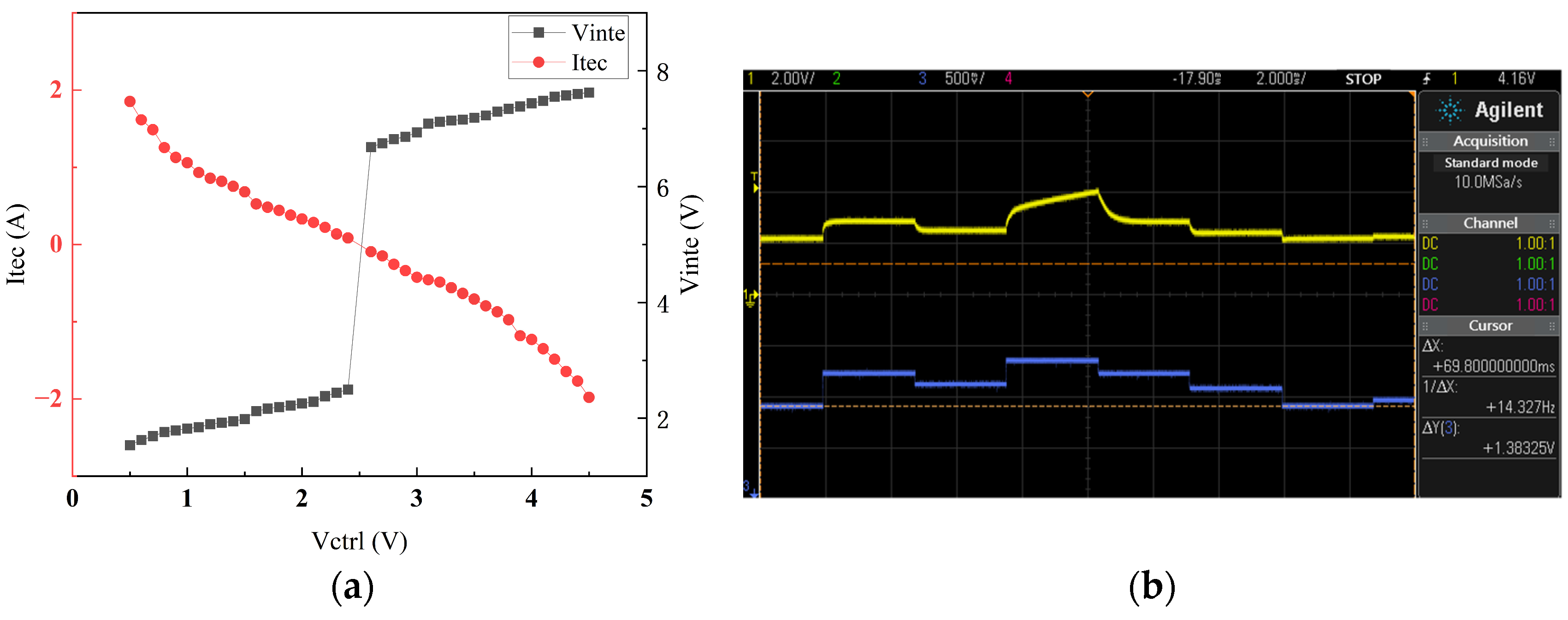
4.2. Voltage-Controlled Constant Current Source
- Threshold Behavior: A clear lasing threshold at .
- Linear Response: Above threshold, optical power exhibited a linear relationship with injection current (), in accordance with the theoretical characteristics presented in Figure 3.
4.3. Target Scanning and Tracking
4.4. Performance Validation of Moving Target Simulation
4.5. Field Ranging of Stationary Target
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, N.; Ho, C.P.; Xue, J.; Lim, L.W.; Chen, G.; Fu, Y.H.; Lee, L.Y.T. A Progress Review on Solid-State LiDAR and Nanophotonics-Based LiDAR Sensors. Laser Photonics Rev. 2022, 16, 2100511. [Google Scholar] [CrossRef]
- Li, X.; Hu, Y.; Jie, Y.; Zhao, C.; Zhang, Z. Dual-Frequency LiDAR for Compressed Sensing 3D Imaging Based on All-Phase Fast Fourier Transform. J. Opt. Photonics Res. 2024, 1, 74–81. [Google Scholar] [CrossRef]
- Hu, K.; Chen, Z.; Kang, H.; Tang, Y. 3D vision technologies for a self-developed structural external crack damage recognition robot. Autom. Constr. 2024, 159, 105262. [Google Scholar] [CrossRef]
- Wu, L.; Chen, Y.; Le, Y.; Zhang, D.; Zhang, X.; Wang, L. GeologyObserver-1: A Dual-Frequency Photon Counting LiDAR UAV Detection System for Three-Dimensional Land and Water Mapping. IEEE J. Miniaturization Air Space Syst. 2025. Early Access. [Google Scholar] [CrossRef]
- Pantazis, A.; Papayannis, A.; Georgousis, G. Lidar algorithms for atmospheric slant range visibility, meteorological conditions detection, and atmospheric layering measurements. Appl. Opt. 2017, 56, 6440–6449. [Google Scholar] [CrossRef]
- Li, Y.; Ibanez-Guzman, J. LiDAR for autonomous driving: The principles, challenges, and trends for automotive LiDAR and perception systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Du, M.; Li, H.; Roshanianfard, A. Design and experimental study on an innovative UAV-LiDAR topographic mapping system for precision land levelling. Drones 2022, 6, 403. [Google Scholar] [CrossRef]
- Villa, F.; Severini, F.; Madonini, F.; Zappa, F. SPADs and SiPMs arrays for long-range high-speed light detection and ranging (LiDAR). Sensors 2021, 21, 3839. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Bhardwaj, A.; Martín-Torres, J. LiDAR remote sensing of the cryosphere: Present applications and future prospects. Remote Sens. Environ. 2016, 177, 125–143. [Google Scholar] [CrossRef]
- Kuprowski, M.; Drozda, P. Feature selection for airborne LiDAR point cloud classification. Remote Sens. 2023, 15, 561. [Google Scholar] [CrossRef]
- Weitkamp, C. LiDAR: Range-Resolved Optical Remote Sensing of the Atmosphere; Springer: Berlin, Germany, 2005. [Google Scholar]
- Luo, Y.; Chen, Y.J.; Zhu, Y.Z.; Li, W.Y.; Zhang, Q. Doppler effect and micro-Doppler effect of vortex-electromagnetic-wave-based radar. IET Radar Sonar Navig. 2020, 14, 2–9. [Google Scholar] [CrossRef]
- Liang, D.; Zhang, C.; Zhang, P.; Liu, S.; Li, H.; Niu, S.; Rao, R.Z.; Zhao, L.; Chen, X.; Li, H.; et al. Evolution of laser technology for automotive LiDAR, an industrial viewpoint. Nat. Commun. 2024, 15, 7660. [Google Scholar] [CrossRef] [PubMed]
- Jin, K.; Zhou, W. Wireless laser power transmission: A review of recent progress. IEEE Trans. Power Electron. 2018, 34, 3842–3859. [Google Scholar] [CrossRef]
- Yan, W.Y.; Shaker, A.; El-Ashmawy, N. Urban land cover classification using airborne LiDAR data: A review. Remote Sens. Environ. 2015, 158, 295–310. [Google Scholar] [CrossRef]
- Li, G.; Zhou, Q.; Xu, G.; Wang, X.; Han, W.; Wang, J.; Zhang, G.; Zhang, Y.; Yuan, Z.; Song, S.; et al. Lidar-radar for underwater target detection using a modulated sub-nanosecond Q-switched laser. Opt. Laser Technol. 2021, 142, 107234. [Google Scholar] [CrossRef]
- Chen, G.; Wiede, C.; Kokozinski, R. Data processing approaches on SPAD-based d-TOF LiDAR systems: A review. IEEE Sens. J. 2020, 21, 5656–5667. [Google Scholar] [CrossRef]
- Lukashchuk, A.; Yildirim, H.K.; Bancora, A.; Lihachev, G.; Liu, Y.; Qiu, Z.; Ji, X.; Voloshin, A.; Bhave, S.A.; Charbon, E.; et al. Photonic-electronic integrated circuit-based coherent LiDAR engine. Nat. Commun. 2024, 15, 3134. [Google Scholar] [CrossRef]
- Chen, X.; Dai, G.; Wu, S.; Liu, J.; Yin, B.; Wang, Q.; Zhang, Z.; Qin, S.; Wang, X. Coherent high-spectral-resolution lidar for the measurement of the atmospheric Mie–Rayleigh–Brillouin backscatter spectrum. Opt. Express 2022, 30, 38060–38076. [Google Scholar] [CrossRef]
- Li, N.; Qiu, X.; Wei, Y.; Zhang, E.; Wang, J.; Li, C.; Peng, Y.; Wei, J.; Meng, H.; Wang, G.; et al. A portable low-power integrated current and temperature laser controller for high-sensitivity gas sensor applications. Rev. Sci. Instrum. 2018, 89, 103103. [Google Scholar] [CrossRef]
- Huang, H.; Ni, J.; Wang, H.; Zhang, J.; Gao, R.; Guan, L.; Wang, G. A novel power stability drive system of semiconductor Laser Diode for high-precision measurement. Meas. Control 2019, 52, 462–472. [Google Scholar] [CrossRef]
- Zhao, Y.; Tian, Z.; Feng, X.; Feng, Z.; Zhu, X.; Zhou, Y. High-Precision Semiconductor Laser Current Drive and Temperature Control System Design. Sensors 2022, 22, 9989. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Zhang, Y.; Liu, H.; Ma, H. Design and Experimental Study of Semiconductor Laser Driver Circuit. Chin. J. Quantum Electron. 2023, 40, 684–693. [Google Scholar]
- Yu, G.; Huang, L.; Zhang, T. Design of Tunable Laser Drive and Temperature Control System Based on FPGA. In Proceedings of the 2024 IEEE 4th International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 22–24 November 2024. [Google Scholar]
- Ming, Z.; Wang, Y.; Song, Y.; Chen, J.; Zhang, Q.; Zhang, J. High-Precision Dual-Channel TEC Temperature Controller for LiDAR Doppler Vibrometry System. In Proceedings of the 2024 Asia Communications and Photonics Conference (ACP) and International Conference on Information Photonics and Optical Communications (IPOC), Beijing, China, 2–5 November 2024. [Google Scholar]
- Li, X.; Ye, N.; Zhang, J.; Li, Y.; Lu, Z.; Jia, H.; Yuan, H.; Liu, W.; Chen, K. An Enhanced Velocity Measurement of Coherent Lidar Based on Time-Domain Compensation and Phase Compensation. In Proceedings of the 2024 Asia Communications and Photonics Conference (ACP) and International Conference on Information Photonics and Optical Communications (IPOC), Beijing, China, 2–5 November 2024. [Google Scholar]
- Pan, H.; Lu, Z.; Sun, J.; Yu, Z.; He, H.; Xu, L.; Li, C.; Ren, W.; Jiang, Y.; Zhang, L.; et al. Research on Laser Coherent Detection with a Super-Coherence Length. Chin. J. Lasers 2024, 51, 1910001. [Google Scholar]
- Sun, G.; Xin, G.; Zhu, R.; Chen, D.; Feng, P.; Hou, X.; Cai, H.; Chen, W. Compact All Fiber Coupled Nonplanar Ring Oscillator Solid-State Laser. Chin. J. Lasers 2022, 49, 1301002. [Google Scholar]
- Rudtsch, S.; Von Rohden, C. Calibration and self-validation of thermistors for high-precision temperature measurements. Measurement 2015, 76, 1–6. [Google Scholar] [CrossRef]
- Borase, R.P.; Maghade, D.K.; Sondkar, S.Y.; Pawar, S.N. A review of PID control, tuning methods and applications. Int. J. Dyn. Control 2021, 9, 818–827. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Param | Value | Conditions (Vacuum) |
|---|---|---|
| 1.8 A | ||
| 9.6 V | ||
| 80 °C | ||
| 0.4 W | ||
| 200 °C | Maximum Processing Temperature |
| Param | Value |
|---|---|
| TEC Driver Control Signal | 0 V to 5 V |
| TEC Current Range ( to ) | −1.8 A to 1.8 A |
| TEC Voltage Range ( to ) | −7.2 V to 7.2 V |
| TEC Supply Voltage (VDD) | 8 V |
| TEC Driver Control Signal | 0 V to 5 V |
| Param | Value |
|---|---|
| Current Source Control Signal | 0 V to 5 V |
| Supply Current | 0 A to 3.6 A |
| Supply Voltage (VDD) | 2.1 V |
| Authors | Temperature Fluctuations | Optical Power Fluctuations | Features |
|---|---|---|---|
| Li et al. [20] | <0.006 °C | Not reported | Hall–Libbrecht design-based |
| He et al. [21] | Not reported | <1% | Controllable closed-loop constant current feedback drive circuit, Neural PI control model |
| Zhao et al. [22] | <0.009 °C | Not reported | Mathematical model combining M sequence and differential evolution (DE) algorithms, Fuzzy PID algorithm |
| Gao et al. [23] | <0.01 °C | Not reported | PID algorithm |
| Yu et al. [24] | ±0.005 °C | Not reported | FPGA based, high speed MOSFETs applied |
| Demonstrated | <0.007 °C Dual | <1% | Cascade PID algorithm, tunable parameters, FPGA-MCU integrated |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ming, Z.; Li, X.; Wang, Y.; Qu, Y.; Lu, Z.; Jia, H.; Yuan, H.; Zhang, Q.; Zhang, J.; Song, Y. A Compact High-Precision Cascade PID-Control Laser Driver for Airborne Coherent LiDAR Applications. Sensors 2025, 25, 2851. https://doi.org/10.3390/s25092851
Ming Z, Li X, Wang Y, Qu Y, Lu Z, Jia H, Yuan H, Zhang Q, Zhang J, Song Y. A Compact High-Precision Cascade PID-Control Laser Driver for Airborne Coherent LiDAR Applications. Sensors. 2025; 25(9):2851. https://doi.org/10.3390/s25092851
Chicago/Turabian StyleMing, Zixuan, Xianzhuo Li, Yanyi Wang, Yuanzhe Qu, Zhiyong Lu, Honghui Jia, Haoming Yuan, Qianwu Zhang, Junjie Zhang, and Yingxiong Song. 2025. "A Compact High-Precision Cascade PID-Control Laser Driver for Airborne Coherent LiDAR Applications" Sensors 25, no. 9: 2851. https://doi.org/10.3390/s25092851
APA StyleMing, Z., Li, X., Wang, Y., Qu, Y., Lu, Z., Jia, H., Yuan, H., Zhang, Q., Zhang, J., & Song, Y. (2025). A Compact High-Precision Cascade PID-Control Laser Driver for Airborne Coherent LiDAR Applications. Sensors, 25(9), 2851. https://doi.org/10.3390/s25092851