1. Introduction
The increasing demand for automated perception and operation, driven by generative model-powered multimodal data synthesis and adaptive information fusion frameworks, has spurred studies and applications in multi-sensor systems [
1,
2]. However, various noises may disrupt the stable operation of multi-sensor systems. To tackle this problem, an efficient noise control algorithm [
3,
4], which can eliminate the noise interference of original signals, is required in various real-world scenarios. This has inspired a great deal of research on noise control over the past decades.
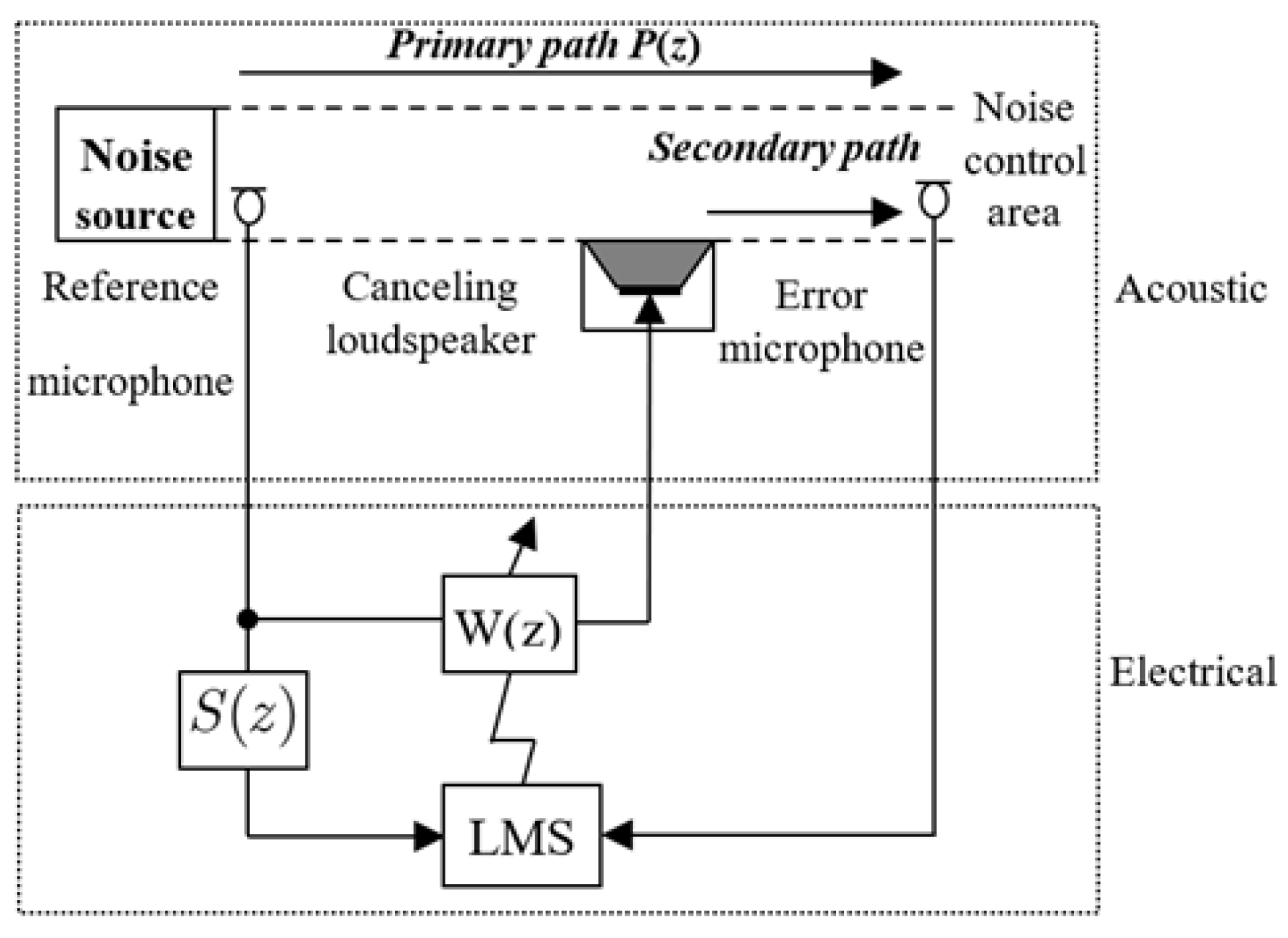
In general, there are two noise control methods: passive noise control (PNC) and active noise control (ANC). The PNC technique is based on the physical properties of materials capable of absorbing sound to reduce sound propagation. Owing to its advantages, this method has been successfully applied to a great deal of civil, industrial, and military equipment. However, it is challenging to deploy these technologies in specific scenarios due to low-frequency sound, dynamic changes, and limited space [
5,
6,
7].
To overcome the limitations of the PNC method, the ANC system utilizes a secondary anti-noise signal, which has the same amplitude and opposite phase as the original noise, to cancel out the noise by employing the principle of signal superposition. This approach has been recognized as an effective method for reducing low-frequency noise and has shown significant potential in recent decades due to its flexibility and ease of integration on various platforms [
8,
9]. For this reason, researchers have explored numerous ANC strategies over the past decades [
10,
11]. According to the differences in the basic model structures, the current ANC can be roughly classified into feedforward ANC (FF-ANC) algorithms [
12,
13] and feedback ANC algorithms [
14,
15]. FF-ANC algorithms rely on a reference sensor to obtain the noise source. In contrast, feedback ANC algorithms only use the error signal to eliminate the noise signal in order to address the limitations of FF-ANC algorithms [
16,
17]. In recent ANC systems, the noise sources can be predicted by using an acoustic sensor. Therefore, the FF-ANC has led to a new trend in the ANC problem due to its powerful performance. Representative methods include the Wiener filter [
12], the compensator structure that combines the infinite impulse response (IIR) filter and the finite impulse response (FIR) filter [
18], the filtered-x least-mean-square (FxLMS) algorithm [
19,
20], the filtered-x normalized least mean square (FxNLMS) algorithm [
21], and the filtered-s least mean square (FsLMS) algorithm [
22]. Furthermore, more complex techniques have also been proposed for ANC systems, such as the approach in [
23], which presented an adaptive bilinear filter to replace the adaptive FIR filter for nonlinear FF ANC systems. Although the control performance is improved, the computational costs are too high when the order of the filter increases. Then, adaptive recursive second-order Volterra (RSOV) filters have been introduced [
24] to solve the problems of signal saturation and nonlinearities in the ANC systems. Again, although the performance is highly reliable, the computational complexity also increases significantly. Moreover, multilayer perceptron networks [
25] were also used to handle the nonlinearities in the noise transmission paths, but this proposed method showed that the convergence speed is slow and the calculation load is increased. Additionally, multichannel methods have also been introduced for nonlinear ANC systems [
26,
27,
28]. Scott C. Douglas [
26] introduced a multi-channel control model by using the FxLMS algorithm applied to a broadband ANC system, and the obtained results were reliable. The authors [
27] utilized a random Fourier filter to replace the adaptive FIR filter-based nonlinear multi-channel narrowband ANC system, and the simulation results indicate that the performance of the random Fourier filter method based on the FxLMS algorithm is superior to that of the conventional FxLMS algorithm. The incremental-learning-based adaptive filter [
28] was applied to multichannel nonlinear ANC systems, which also attains higher efficiency than conventional ANC systems. Generally, multi-channel ANC systems provide reliable performance, but the computational load increases significantly as the number of channels rises. On the other hand, the FxLMS algorithm has been applied to the ANC systems [
26,
29,
30,
31] because of its simplicity in the designed system. To improve the convergence rate, a variable step size based on the squared error has been introduced to estimate the unknown transfer function [
32,
33], where the simulation results show that the convergence speed is significantly improved compared with the classical FxLMS algorithm. Following this idea, some authors have developed the variable step-size FxLMS algorithm for ANC systems [
34,
35,
36,
37,
38,
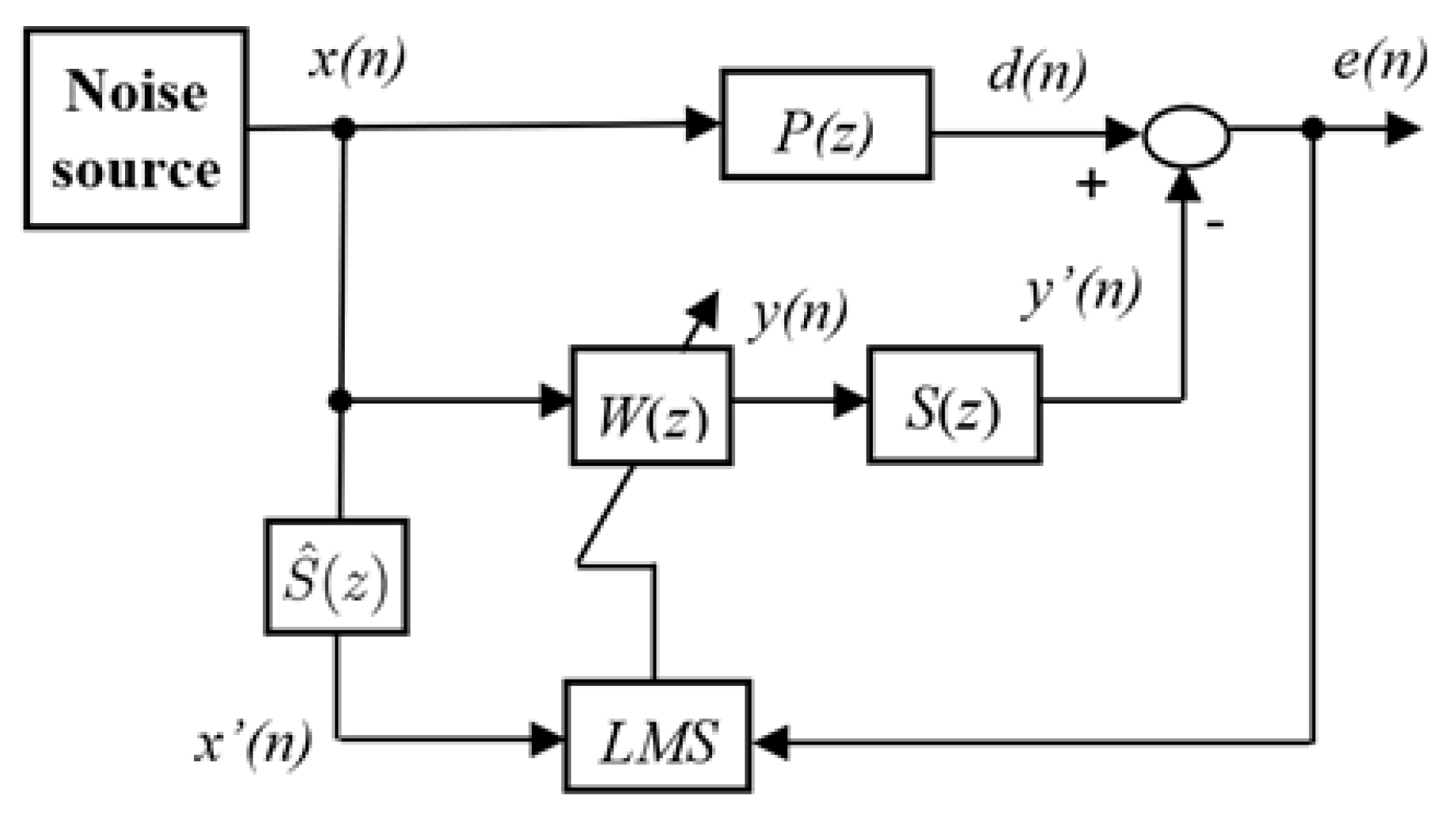
39]. However, FF-ANC methods only focus on improving the structure of the ANC system with the FxLMS algorithm (which utilizes an FIR filter structure and the LMS learning algorithm to optimize the weights of the FIR filter), and it is performed on noise sources and the primary path with minor nonlinearity or even with linear dynamics. Therefore, for practical ANC systems with FxLMS algorithms, the nonlinearities in the primary path, noise sources, and even the secondary path should be further addressed to enhance the control performance [
22].
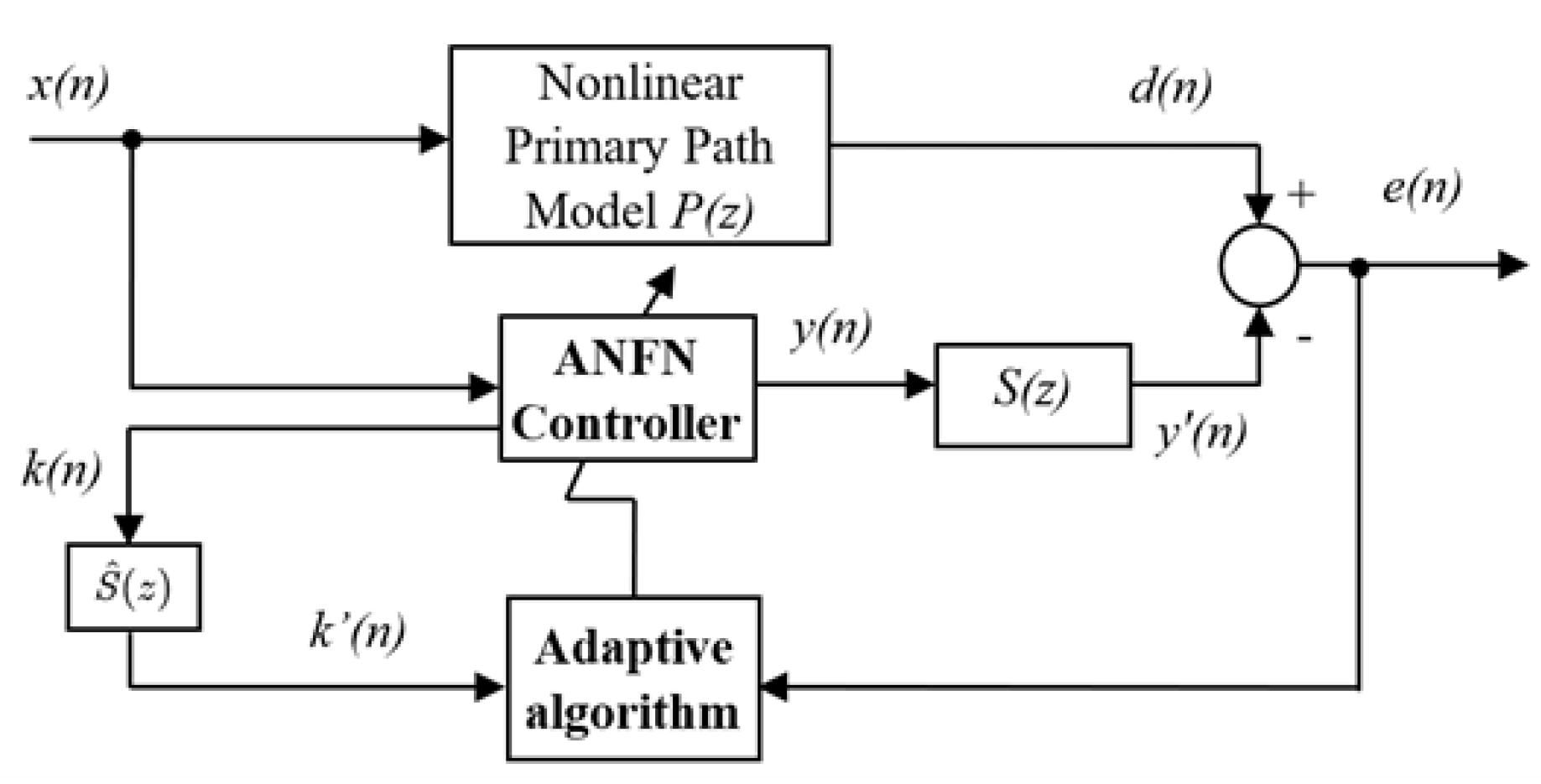
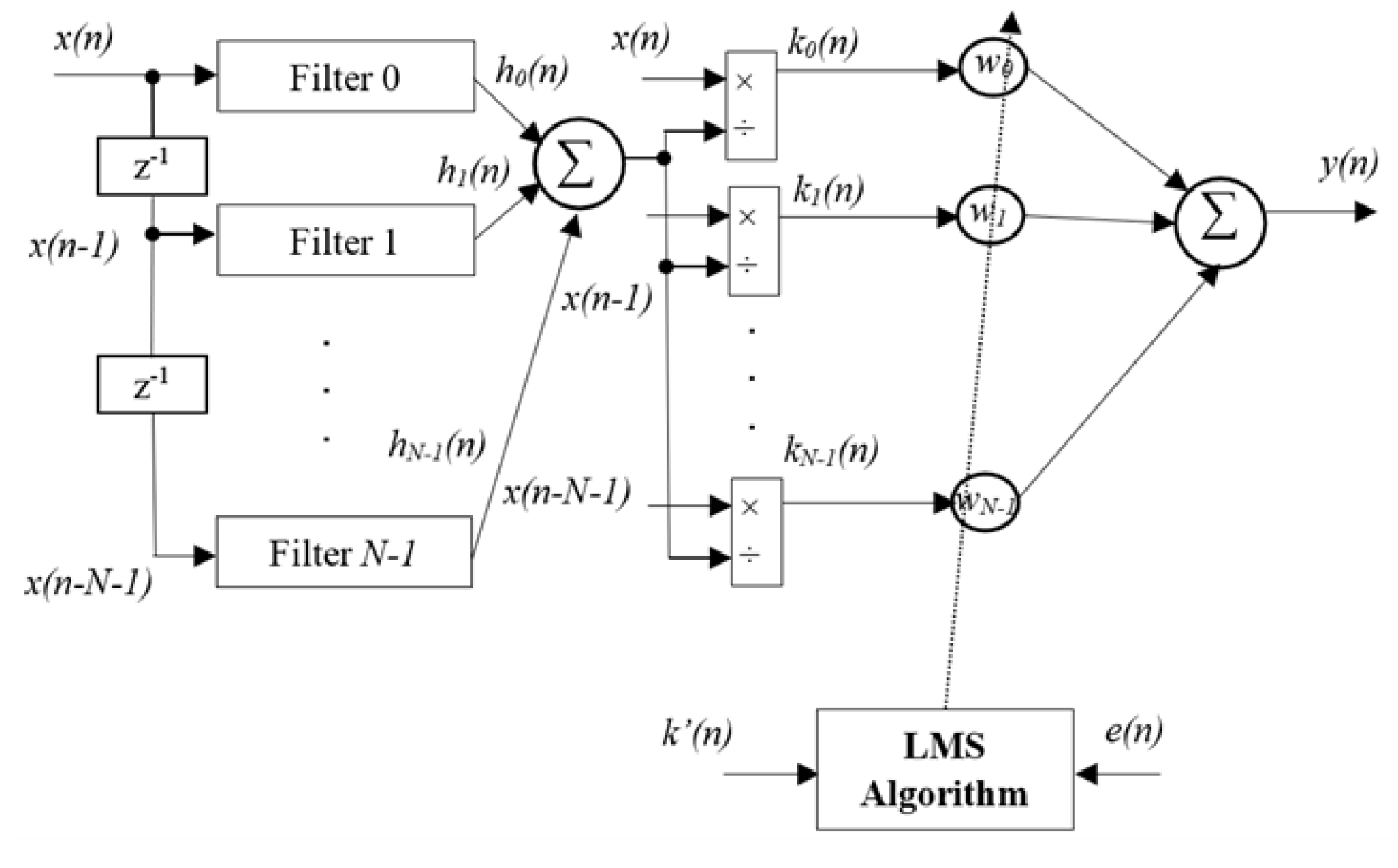
To solve the above challenge, an adaptive neuro-fuzzy network (ANFN) based on the FxLMS algorithm is proposed for the nonlinear FF-ANC systems. Neural networks and fuzzy logic are widely used in nonlinear control, especially in system identification and modeling, control of highly complex systems, and signal processing. While neural networks [
40,
41] learn from data but operate as a “black box”, fuzzy logic [
42,
43] uses rule-based reasoning to mimic human expertise. In contrast with fuzzy logic, which lacks self-learning capabilities, neural networks can adapt dynamically to changing environments. Additionally, with the rapid advancement of technology today, DSPs with high processing speeds and low costs are being developed, making the testing of complex systems easier. The validation of modern control methods has been conducted on real-time systems, such as Fuzzy Logic Control for hydroponic systems in an Internet of Things (IoT) environment [
44] and for the control of switched reluctance motors [
45]. Furthermore, recently, neural networks have also been used to update the weights of the FxLMS algorithm, which has been implemented on real ANC systems [
46,
47]. To account for uncertainties and nonlinearities in ANC systems, an adaptive neural network approach is proposed. At the same time, a fuzzy logic-based strategy is introduced to overcome the limitations associated with manual fine-tuning and the nonlinear behavior of conventional methods. The integration of these two approaches exploits their respective advantages and enables a more efficient convergence to optimal solutions. The proposed ANFN method can handle the case where noise sources and primary paths have high nonlinearities. Then, we develop a novel controller based on the VSS-LMS algorithm [
32], which has a lower computational load and adaptively adjusts the step-size constant used as the learning gain. The convergence of these ANC systems is also proven using the Lyapunov function. Finally, extensive comparative simulations are performed to validate the proposed methods. However, for nonlinear systems, ensuring their reliability and performance requires a significant amount of computation and is also dependent on the signal’s sampling frequency. Therefore, to experiment with nonlinear ANC systems, it is essential to calculate the system’s computational load to select the appropriate DSP sets.
The rest of this paper is organized as follows:
Section 2 outlines the basic principle of the FF-ANC system and presents the detailed design of nonlinear ANC systems using the ANFN controller. In
Section 2.4, suitable comparisons with the available results are examined to address the computational complexities. Simulations are shown in
Section 3.
Section 4 draws some conclusions.
3. Simulations
The sampling frequency of signals is consistently set as 8 kHz, and the linear secondary path model is selected as a signal amplifier [
48], i.e.,
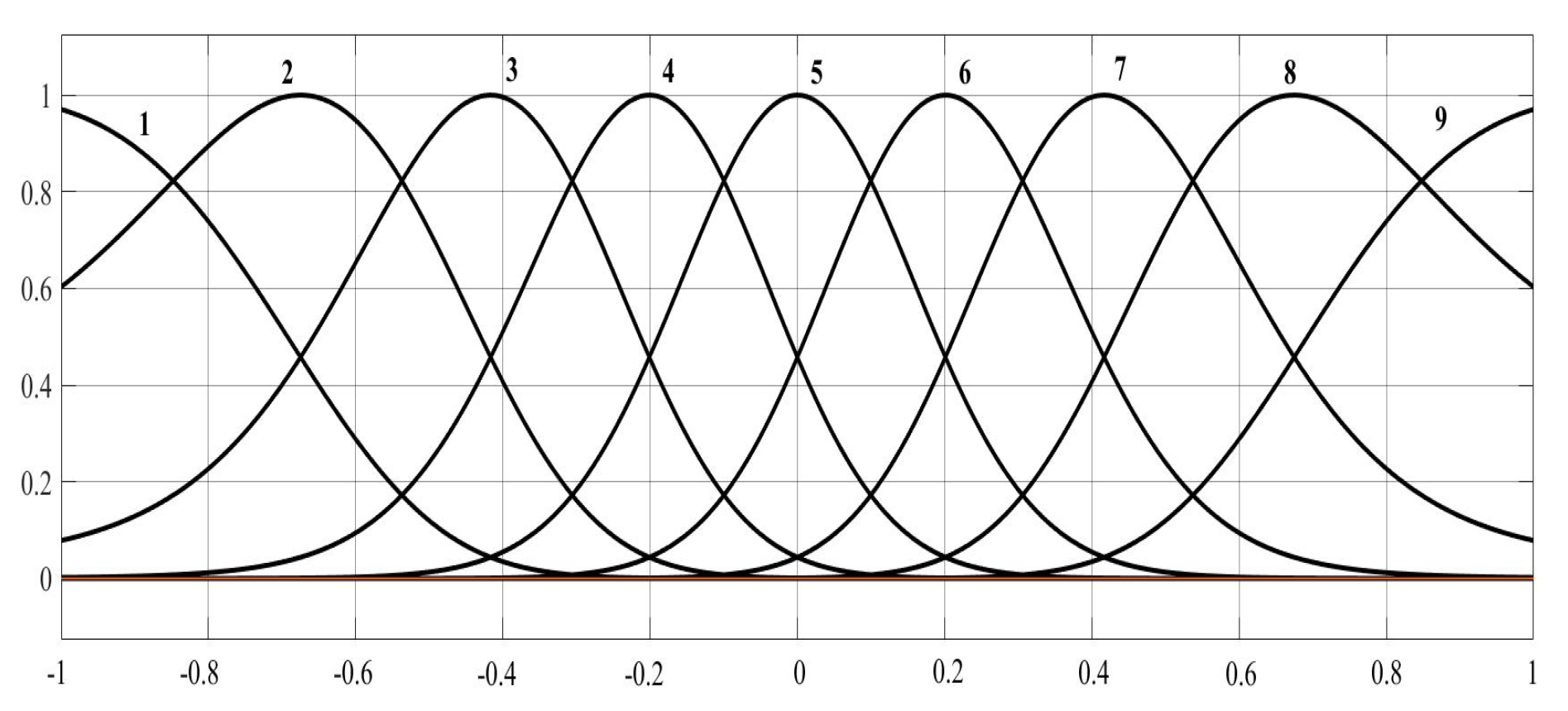
The fuzzy logic system input is defined with nine fuzzy sets. The width
c and the means
of the Gaussian membership functions are chosen as
These parameters can be chosen through a trial-and-error approach and should be selected to strike a balance between stability and control performance.
Figure 5 presents a graphical representation of the means and widths of the Gaussian membership functions. The operating range is assumed to be
.
Case 1: In this case, we show that the traditional ANC system using the FxLMS algorithm operates effectively under linear conditions. We select the order of the adaptive filter as
, the noise source as a sinusoidal signal with a low frequency of 25 Hz, and the primary path as a linear transmission path [
22].
Additionally, for the proposed ANFN-LMS, we select
and the ANFN-VSS-LMS method; we select
and
. The noise is set as
.
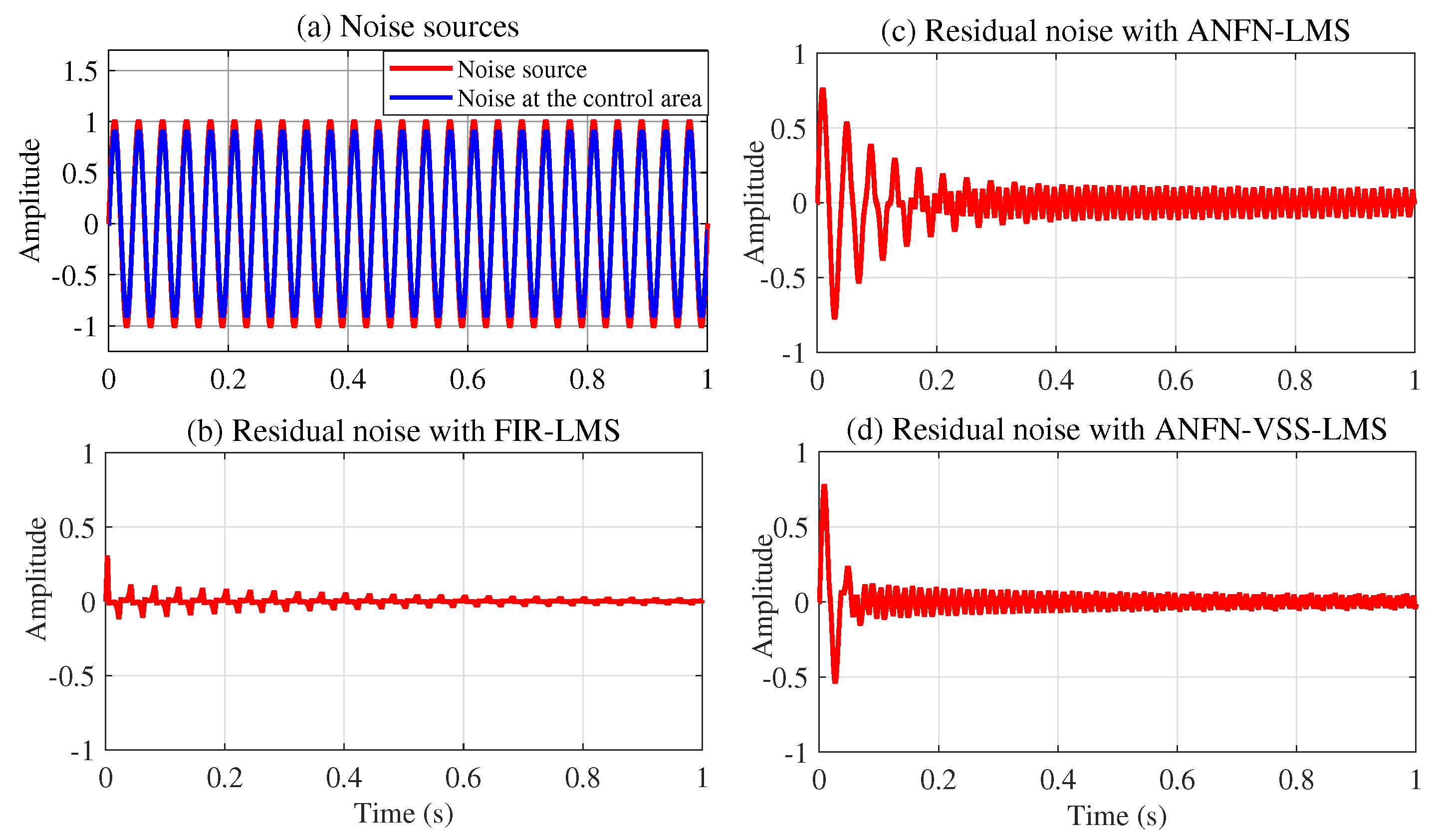
Figure 6 presents the simulation results in the time domain with a low-frequency noise source
of 25 Hz. Note that
Figure 6a shows the noise source to be controlled with the solid red line, and the noise at the control area after being transmitted through the primary path (
29) is presented in the solid blue line. This figure indicates that the signal amplitude at the primary path output
is smaller than that of the noise source signal
, since all the coefficients in the primary path
are smaller than and equal to one (which is also reasonable as it represents the signal loss in the environment).
Figure 6b–d present the residual noise of the three approaches: FIR-LMS, ANFN-LMS, and ANFN-VSS-LMS.
Figure 7 shows the simulation results of the three controllers in the frequency domain based on the analysis of 8000 samples. In this figure, the blue solid line displays the power spectrum of the residual noise with the FIR-LMS system, the green solid line shows the power spectrum of the residual noise with the ANFN-LMS system, and the purple dash line represents the power spectrum of the residual noise of the proposed ANFN-VSS-LMS system. From these figures, it can be seen that the performance of the ANFN-VSS-LMS system is better than that of the ANFN-LMS system, and the adaptive FIR-LMS filter is more effective than the proposed ANFN controller in this linear case. This shows that using nonlinear controllers for linear systems is more complex, which also leads to a slower convergence speed compared with linear controllers. However, in reality, we are dealing with nonlinear systems in many cases, as demonstrated by the following simulation cases 2, 3, and 4.
Case 2: In this case, the noise source is selected as a nonlinear signal, which is the sum of two sinusoidal signals with frequencies of 30 Hz and 60 Hz. All other system parameters are identical to those in Case 1. Simulation results in this case are presented in
Figure 8,
Figure 9,
Figure 10,
Figure 11 and
Figure 12.
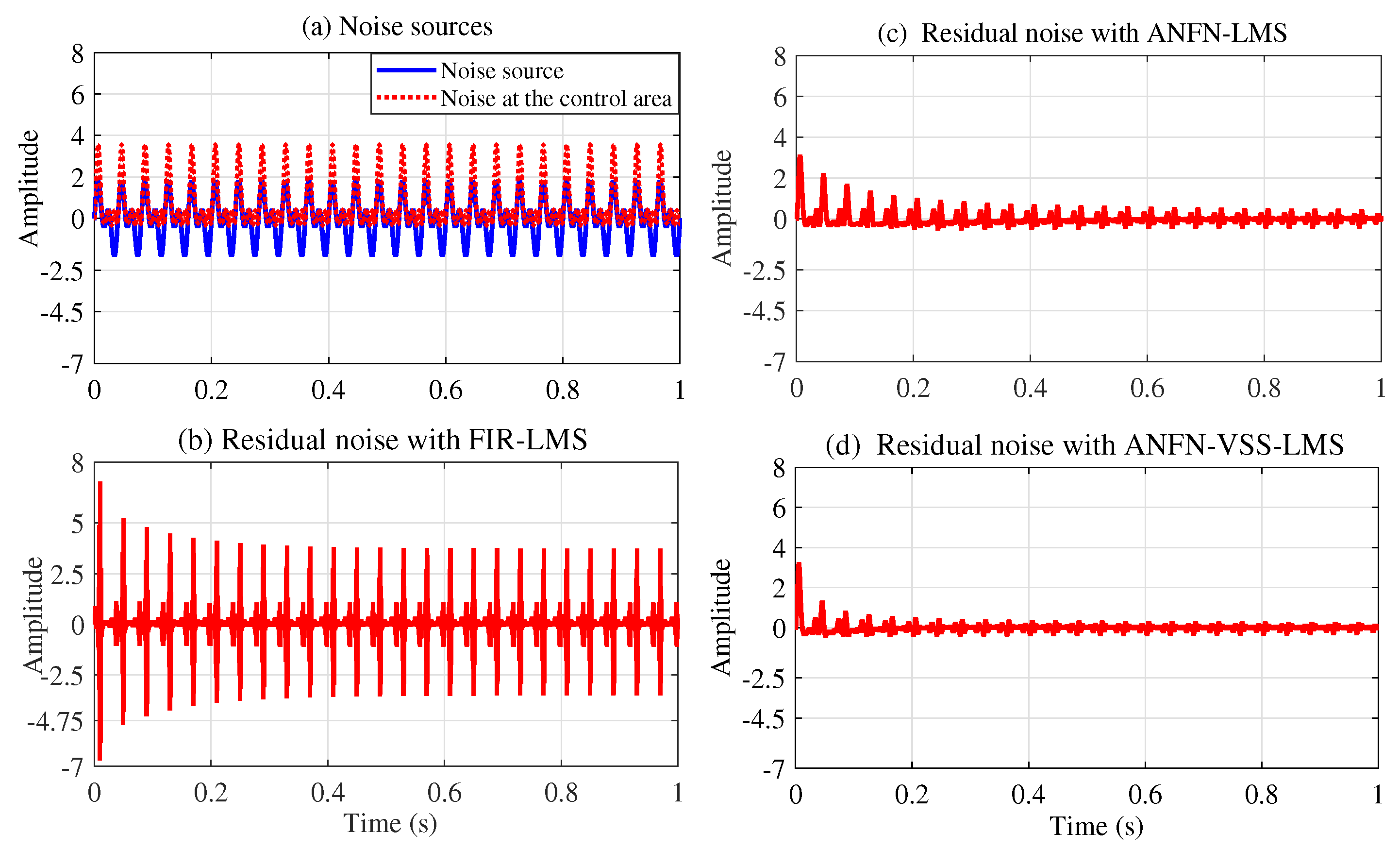
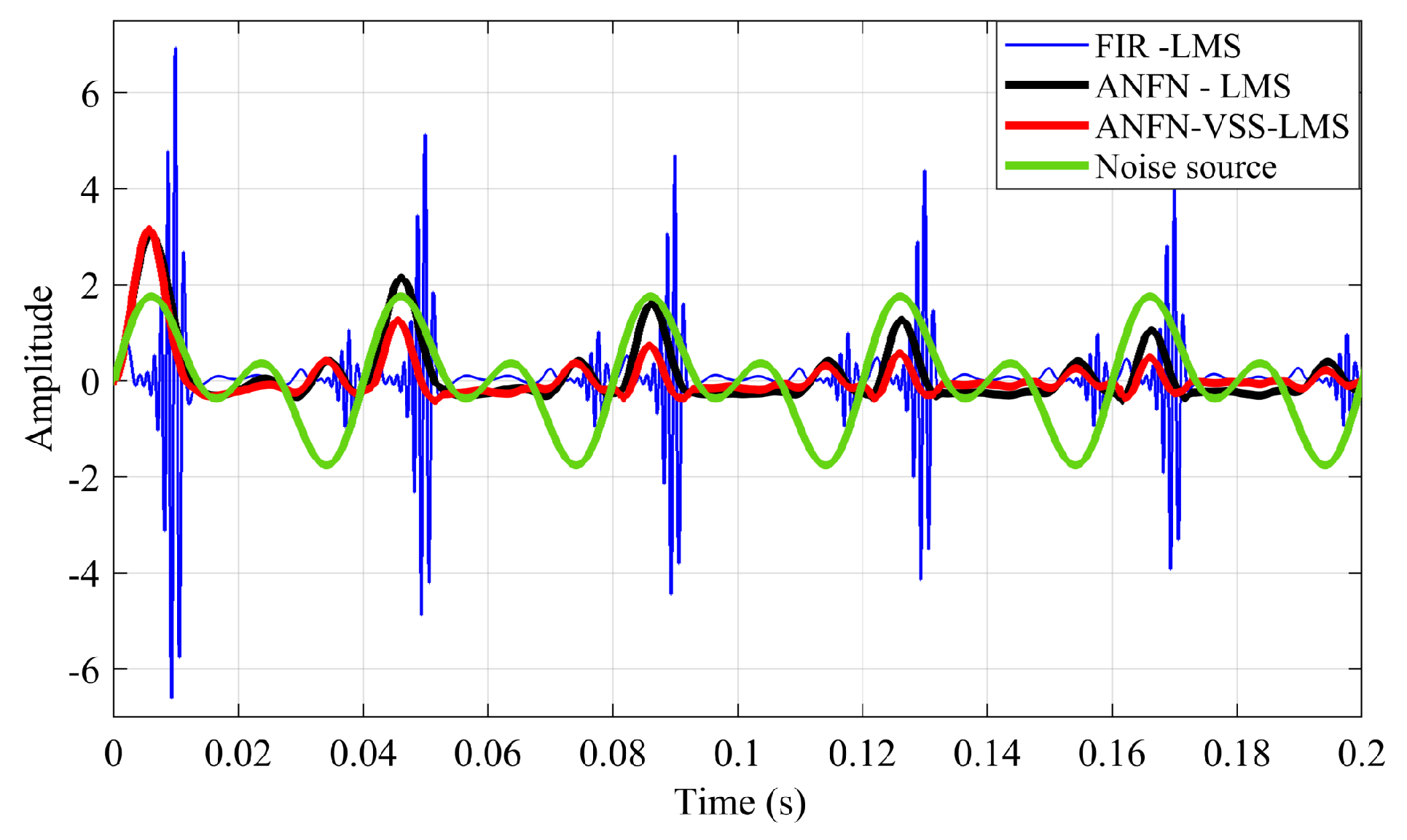
Figure 8 depicts the noise source signals and the performance of the ANC system of three methods in the time domain.
Figure 8a presents the noise source
and the noise at the control area
.
Figure 8b depicts the residual noise of the FIR-LMS filter.
Figure 8c and
Figure 8d show the residual noise of the ANFN-LMS algorithm and the ANFN-VSS-LMS algorithm, respectively. Here, we can find that the residual noise for FIR- LMS is even larger than a fundamental item. This can be explained as follows: When two signals are added together, in addition to the central frequency components with the largest amplitude, several smaller amplitude signals at other frequencies also appear (called intermodulation products). These products are typically integer multiples or combinations of the original frequencies. Therefore, they can be regarded as nonlinearities of the system, causing ANC systems using FIR-LMS filters to deviate from a stable trajectory or potentially become unstable. To further clarify this issue, we can obtain the output signal
and
from the secondary path (
27), which is shown in
Figure 9.
Figure 9a illustrates the output signals
of three controllers, in which the red solid line, the green dash line, and the purple dash line represent the output signals of three controllers: FIR-LMS, ANFN-LMS, and ANFN-VSS-LMS systems, respectively. Here, it can be observed that the ANC system using the FIR-LMS controller generates these undesirable sinusoidal signal components, while the ANFN-LMS and ANFN-VSS-LMS controllers do not show such behavior.
Figure 9b–d also present the output signals of the controllers (FIR-LMS, ANFN-LMS, and ANFN-VSS-LMS)
after the transmission of the secondary path
, which indicate that the amplitude of signals
is further amplified compared with the signals
; i.e., the secondary path (
27) is selected as a signal amplifier [
22]. Therefore, the harmonics [
49] in the FIR-LMS controller-based ANC system increase as they pass through the secondary transmission path.
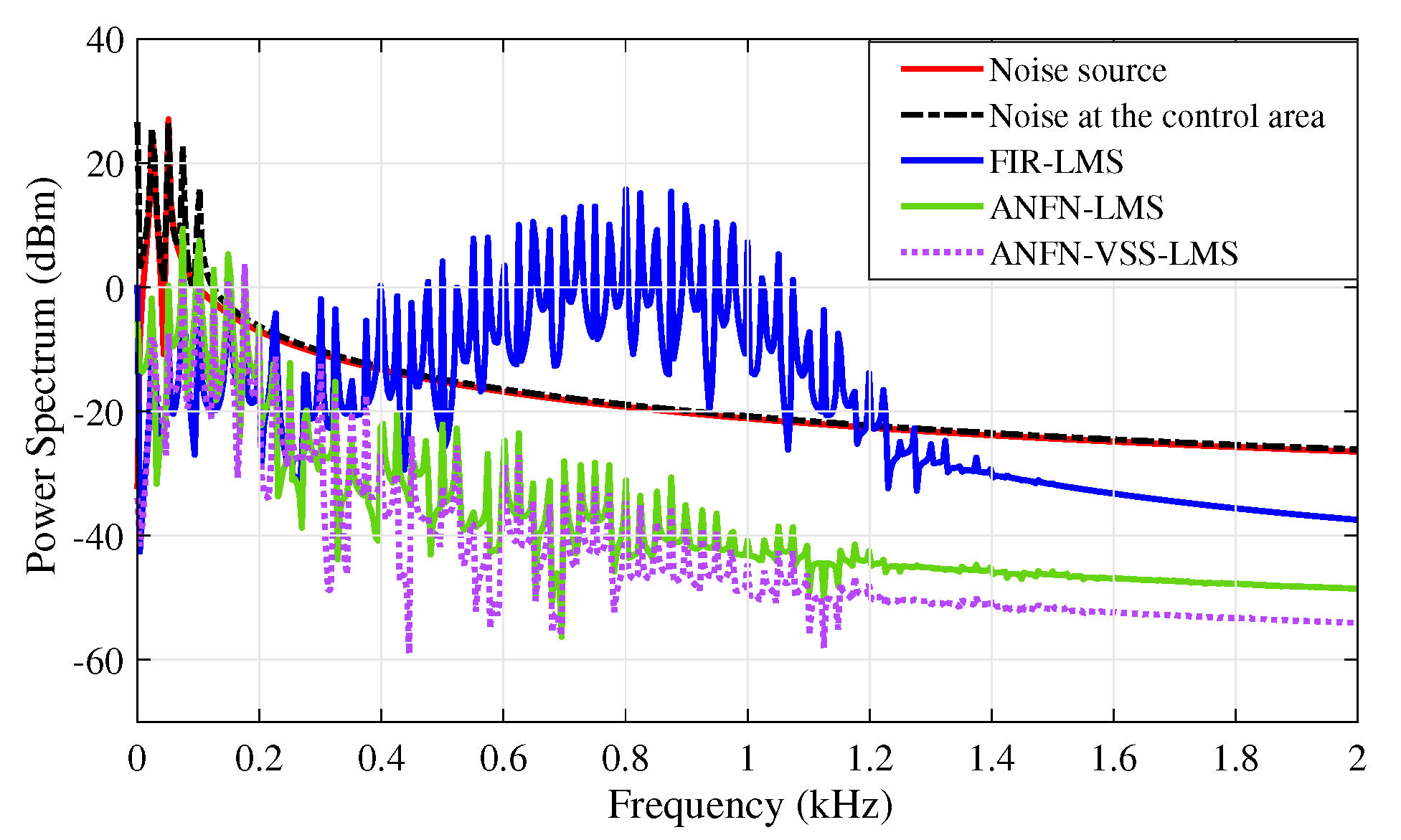
Figure 10 presents the simulation results in the frequency domain, where the black solid line and the red solid line represent the power spectra of the original noise source and the noise in the control area, respectively. The blue dashed line, purple solid line, and green solid line represent the power spectra of the residual noise for the FIR-LMS, ANFN-LMS, and ANFN-VSS-LMS systems, respectively. Here, it can be found that the FIR-based FxLMS method functions well in the frequency range that needs to be controlled, but it also generates signal components outside the frequency range that needs to be controlled (about 0.8 kHz). From this figure, it can be observed that the proposed ANFN-VSS-LMS controller provides a more efficient control response than the ANFN-LMS controller.
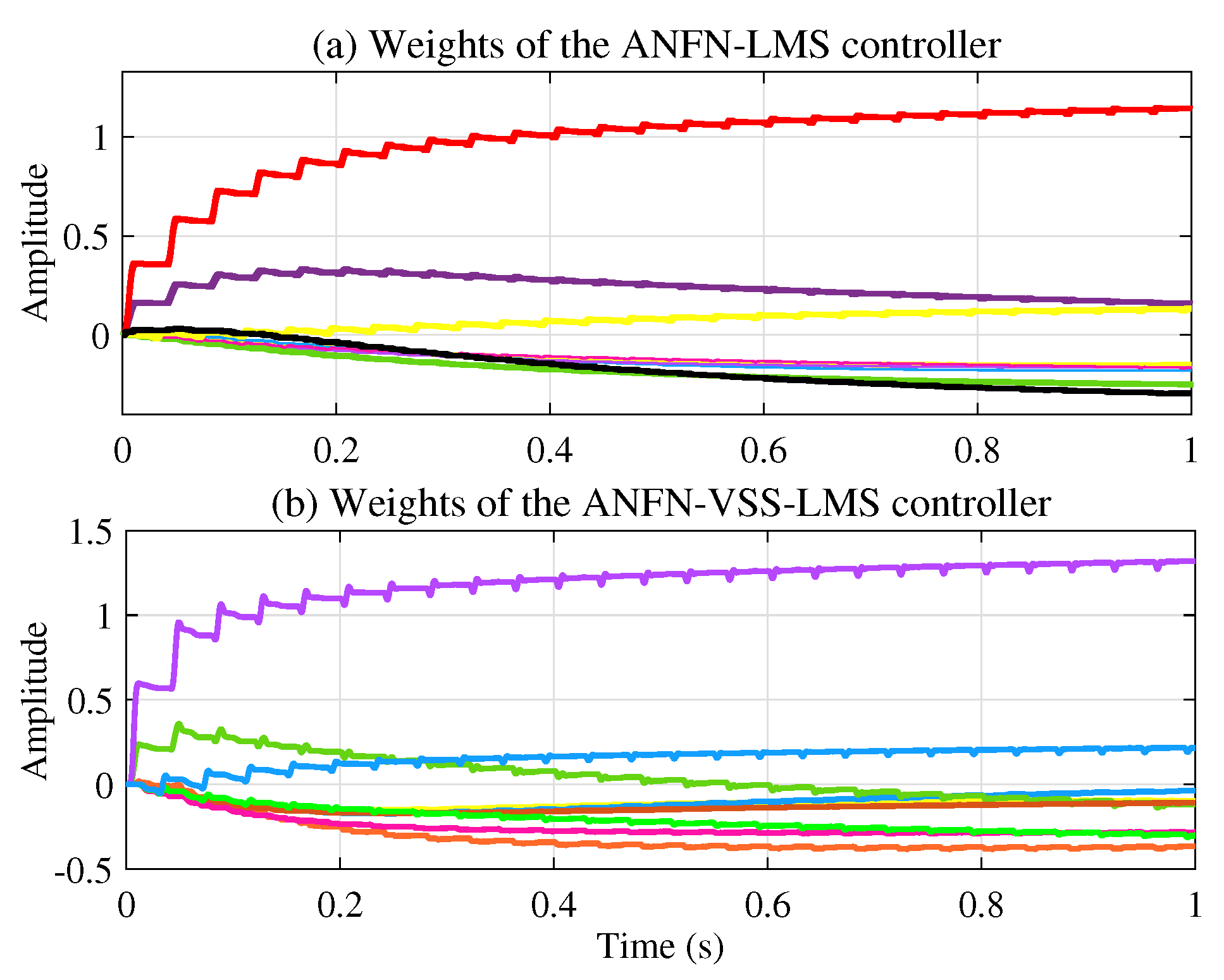
Figure 11a presents the learning weights of the FIR-LMS filter, which demonstrates that the system converges.
Figure 11b and
Figure 11c respectively present the neural network weights of the ANFN-LMS and ANFN-VSS-LMS methods. It can be observed that the learning weights of the ANFN-VSS-LMS algorithm converge more rapidly than those of the ANFN-LMS algorithm. From this figure, it can be seen that the coefficients
of controllers do not converge to fixed values around a fixed point; instead, they remain bounded and show convergent trends. In fact, it can be found from (
15) that the coefficients
converge to constant values if and only if
.
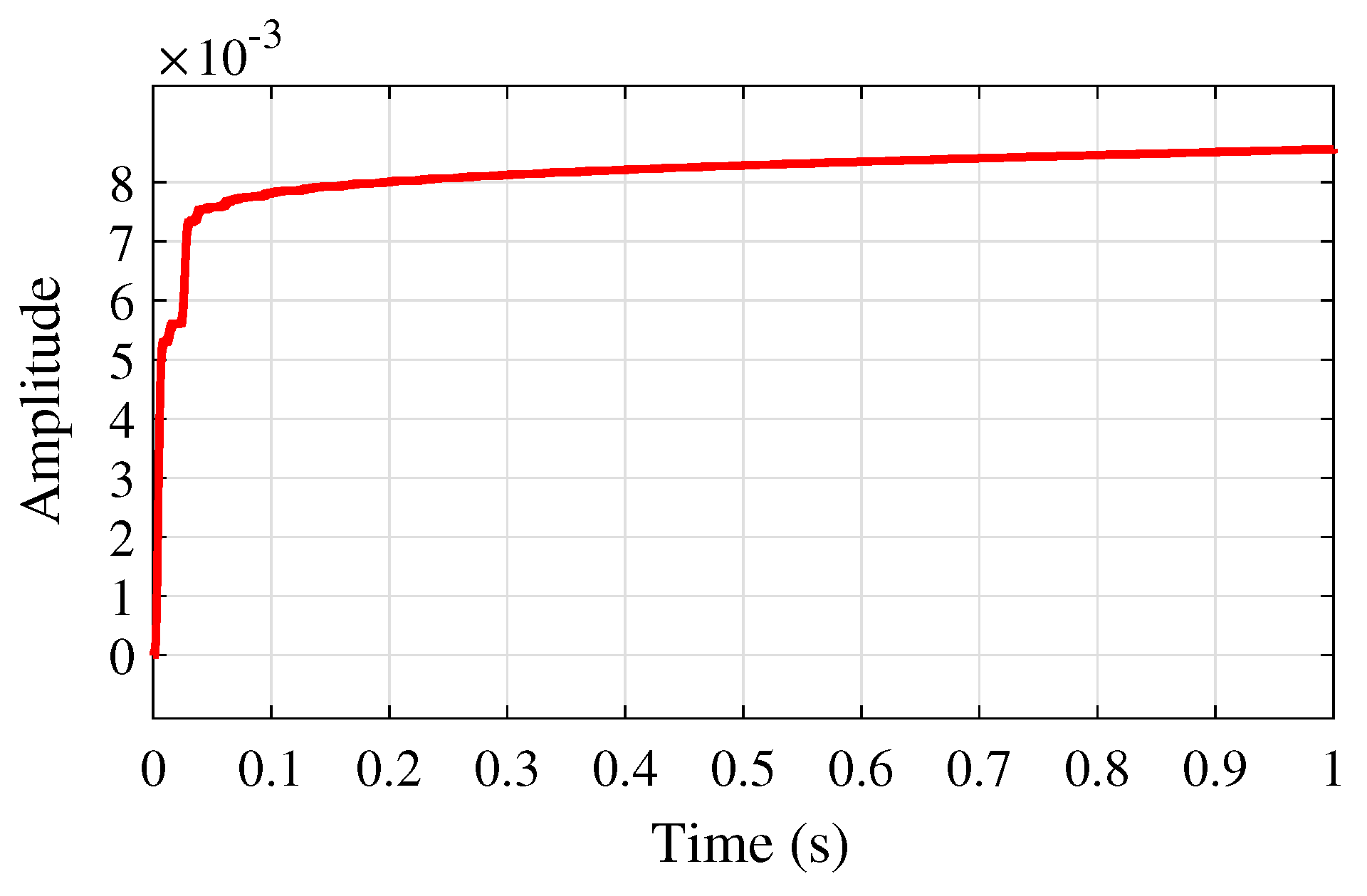
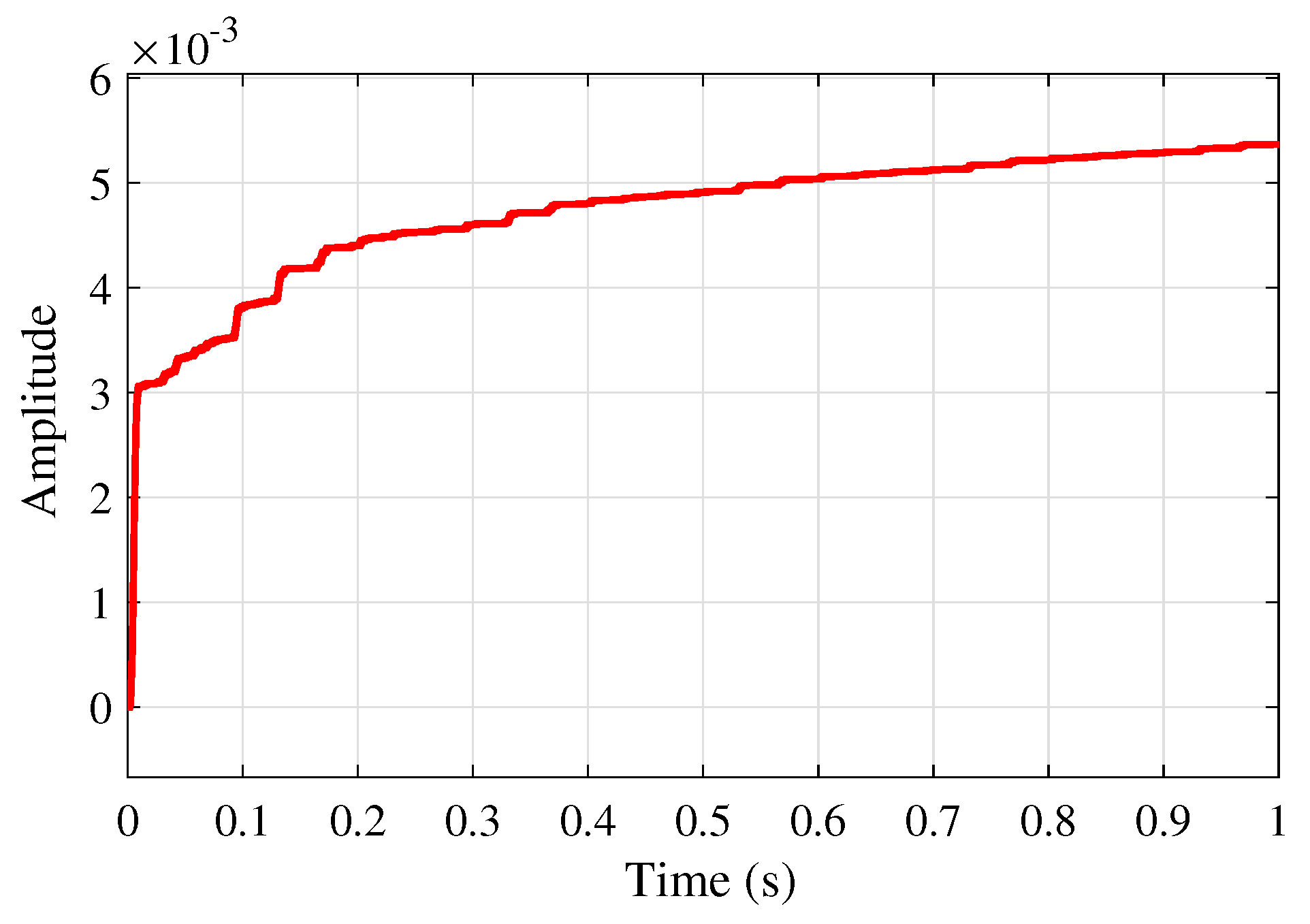
Figure 12 shows the adaptive learning rate profile of
based on the proposed VSS-LMS algorithm (
23), successfully adjusting the learning rate as needed, which aids in network convergence rather than maintaining a constant value. This figure also illustrates that this step size converges to a constant
as proved in Theorem 3.
To comprehensively evaluate the performance of the proposed method, the quantitative Root Mean Square Error
is provided in
Table 5.
As shown in
Table 5, the experimental results indicate that, compared with the ANFN-LMS method, the proposed method reduces the control error index RMSE by 34.61%, and compared with the FIR-LMS method, it reduces by 46.9%. These RMSE values validate that the proposed ANFN-VSS-LMS method can recover the original signal with the smallest residual error MSE, outperforming the established methods.
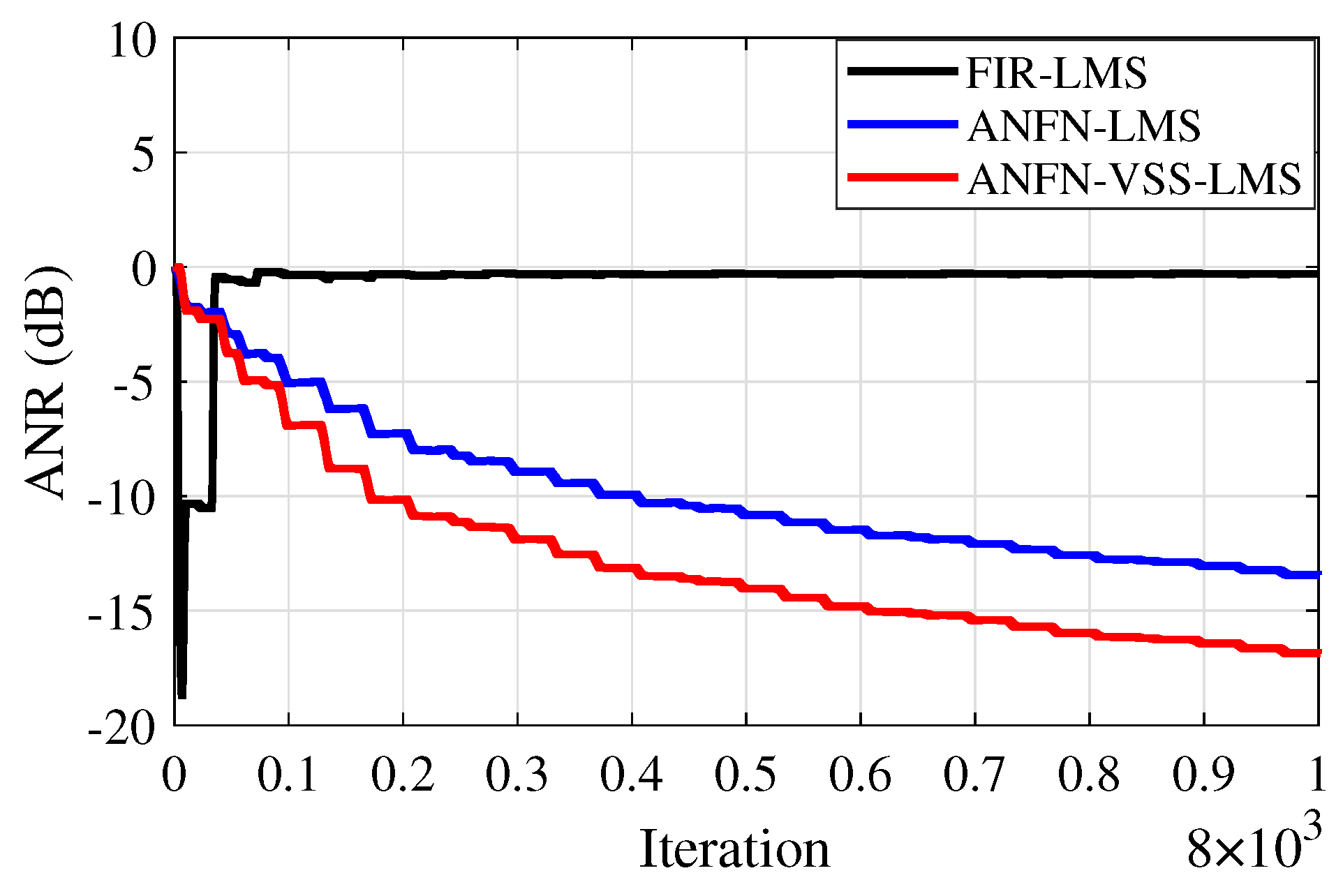
Furthermore, to evaluate the effectiveness of the methods, the Average Noise Reduction
is also shown in
Figure 13. In this case, the proposed ANFN-VSS-LMS system has the lowest steady-state ANR, followed by the ANFN-LMS system and the FIR-LMS model. Among the three models, the proposed ANFN-VSS-LMS system stands out with a significant steady-state advantage compared with the other two models.
Case 3: In this case, to show the performance of the proposed ANFN-VSS-LMS method, we use the primary path as a nonlinear transmission line represented by a second-order polynomial as follows:
All other parameters of the system are chosen to be the same as in Case 2 with the case of
. Simulation results are shown in
Figure 14,
Figure 15,
Figure 16,
Figure 17,
Figure 18 and
Figure 19.
Figure 14 illustrates the simulation results with a noise source consisting of the sum of two sinusoidal signals with frequencies of 30 Hz and 60 Hz in the time domain.
Figure 14a displays the noise source and the noise after transmission through the nonlinear primary path, represented by the solid blue line and the dotted red line, respectively. This figure shows that the amplitude of the signal deformations is quite large compared with the original noise signal. This phenomenon demonstrates that the nonlinear transfer function of the primary path can lead to a nonlinear distortion of the noise [
49].
Figure 14b–d depict the residual noise of three approaches: FIR-LMS, ANFN-LMS, and ANFN-VSS-LMS in the time domain. In this figure, the proposed ANFN-VSS-LMS model exhibits the lowest residual noise, followed by the ANFN-LMS model and the model using the adaptive FIR filter. The superior performance of the proposed ANFN-VSS-LMS method stems from its modification of the standard FxLMS algorithm, which dynamically adjusts the step size by incorporating a forgetting factor.
Furthermore, the simulation results in the frequency domain are presented in
Figure 15. In this figure, the solid red line and the solid black line respectively represent the power spectrum of the noise source signal to be controlled and the noise signal at the control area after being transmitted through the nonlinear primary path. Here, it is noticed that when the signal travels through a nonlinear transmission line, new frequency components emerge along with the original signal. This effect occurs as the nonlinear properties of the transmission line generate additional frequencies that were not present in the original signal. Additionally, the solid blue line displays the power spectrum of the residual noise from the FIR-LMS model. From this result, it can be seen that the FIR-LMS method fails to converge at a specific frequency of around 0.8 kHz due to the nonlinearities in the transmission path of the ANC system. This emphasizes the ineffectiveness of the adaptive FIR filter for nonlinear ANC systems. The solid green line and the dashed purple line respectively present the power spectrum of the residual noise for the ANFN-LMS controller and the proposed ANFN-VSS-LMS controller. These results indicate that the performance of the proposed ANFN-VSS-LMS controller is more effective than that of the ANFN-LMS controller.
Figure 16 presents the harmonic signals at the output
of three controllers in the time domain. The blue solid line represents the output signal of the FIR-LMS filter, which generates a frequency band different from the original noise frequency. This discrepancy, probably caused by the nonlinearities of the system [
49], results in the divergence of the ANC system. The black solid line and the red solid line represent the output signal of the ANFN-LMS controller and the proposed ANFN-VSS-LMS controller, respectively. This indicates that the proposed controllers have successfully removed the harmonic component introduced by the nonlinear noise source and the nonlinear primary path.
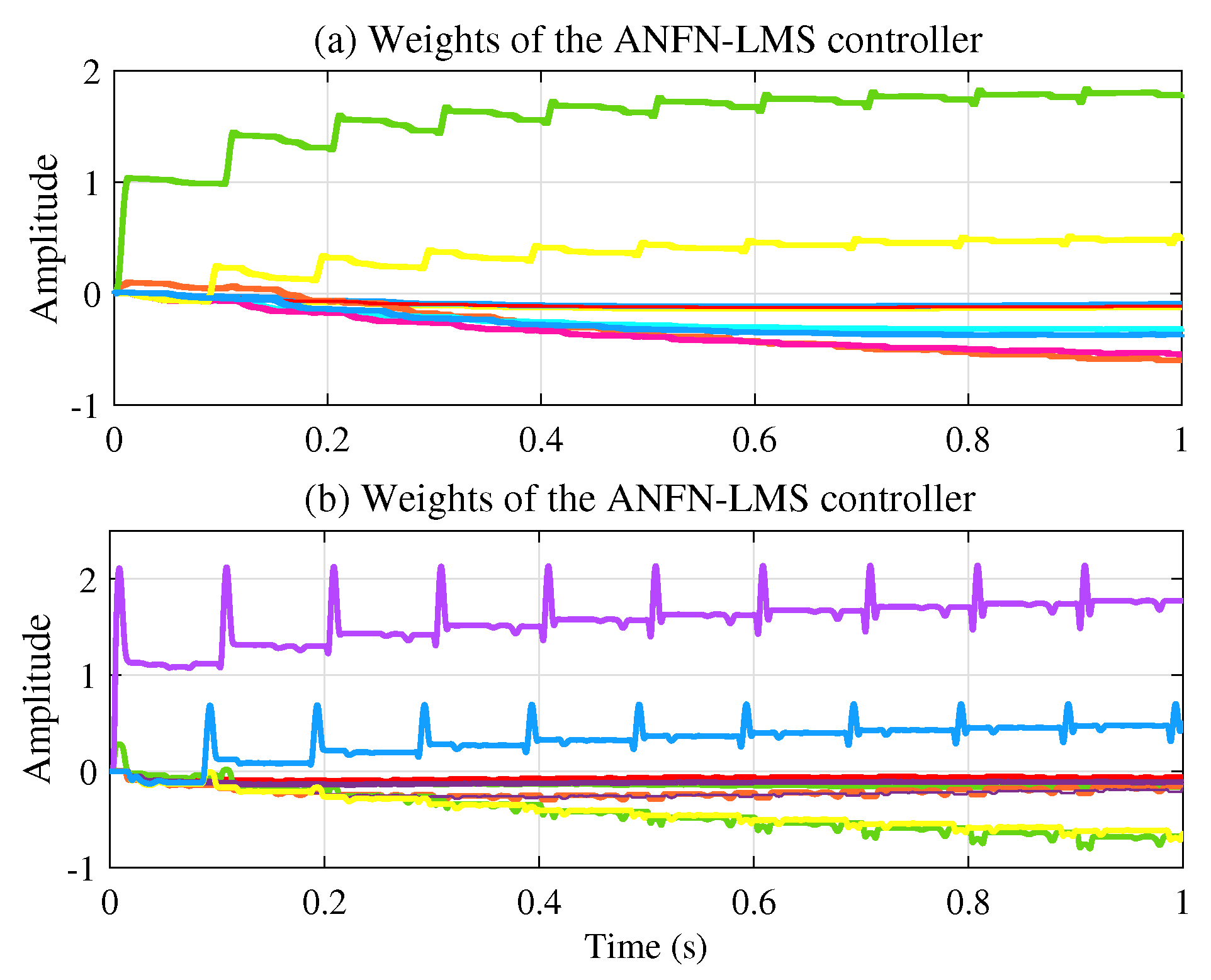
Moreover,
Figure 17a and
Figure 17b show the neural network weights during the learning process of the ANFN-LMS and ANFN-VSS-LMS methods, respectively. It is obvious that the ANFN controller using the VSS-LMS algorithm converges more rapidly than the ANFN controller using the standard LMS algorithm.
Figure 18 shows the response of
for the proposed VSS-LMS method.
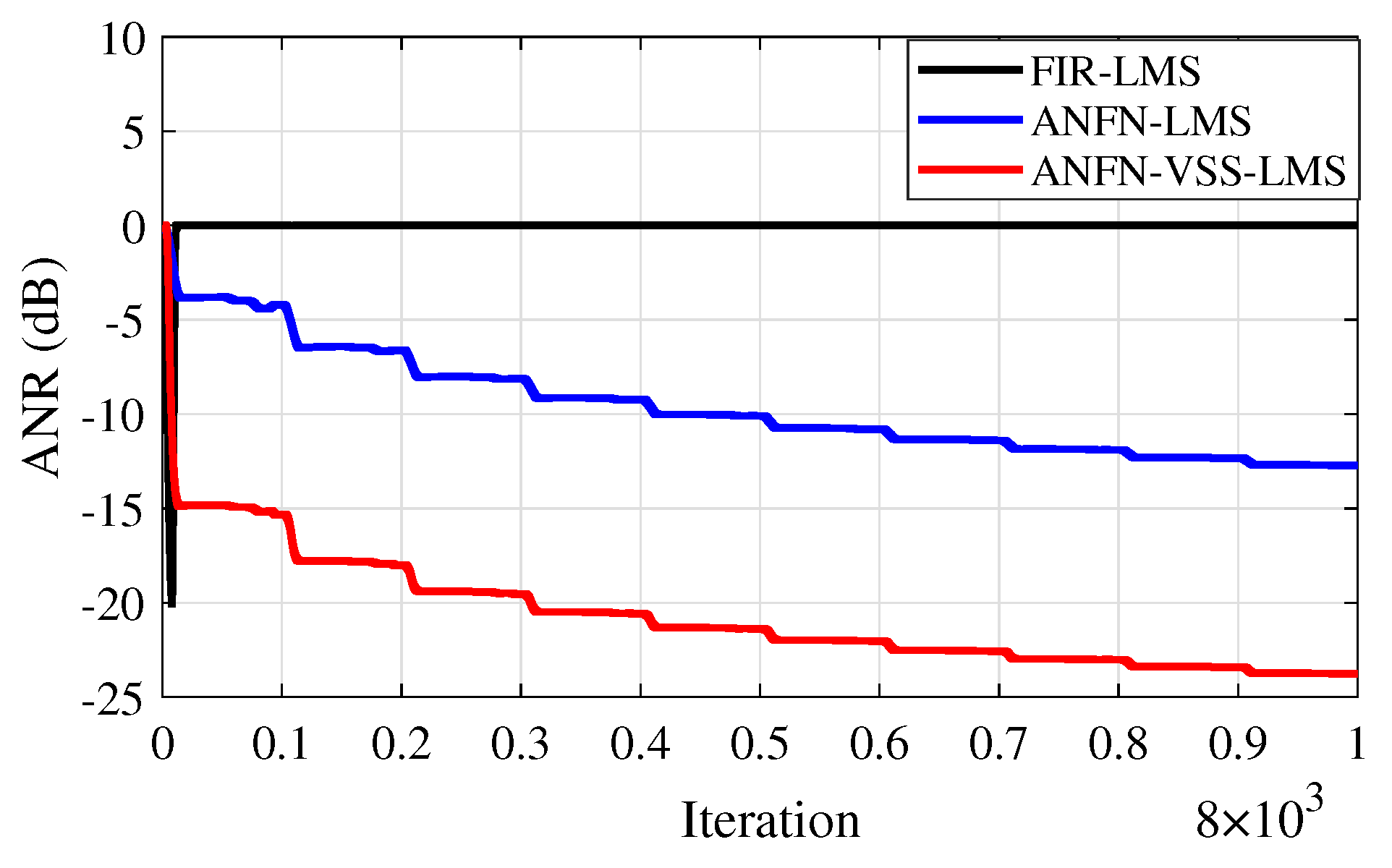
Figure 19 illustrates the average noise reduction index of the systems. It is evident from this figure that the proposed ANFN-VSS-LMS method recovers the original signal more effectively than the ANFN-LMS controller. Additionally, the figure shows that the traditional FIR-LMS method fails to recover the original signal.
From the root mean square error indices provided in
Table 6, it can be observed that the proposed ANFN-VSS-LMS results in a 30.27% reduction compared with ANFN-LMS and a 96.23% reduction compared with FIR-LMS.
Case 4: In this case, the noise source is modeled as the sum of a multi-sinusoidal signal with three frequency components: 20 Hz, 30 Hz, and 40 Hz. All other system parameters are set the same as in Case 3. The simulation results for this scenario are presented in
Figure 20,
Figure 21,
Figure 22 and
Figure 23.
Figure 20a displays both the noise source and the noise after traversing the second-order nonlinear transfer function path in the time domain. This figure also shows that the noise amplitude in the control region varies significantly with respect to the noise source.
Figure 20b presents the residual noise of the adaptive FIR-LMS model, indicating that the FIR-LMS method is ineffective when the system has nonlinearity and the signal amplitude changes abnormally, which leads to system instability.
Figure 20c and
Figure 20d present the residual noise of ANC systems using the ANFN-LMS and proposed ANFN-VSS-LMS methods, respectively. These figures show that the proposed ANFN-VSS-LMS controller outperforms the ANFN-LMS controller.
Figure 21 presents the simulation results in the frequency domain, where the blue solid line and the black dash line respectively represent the power spectrum of the noise source signal and the noise after passing through the nonlinear path. Here, it can be observed that numerous signals are generated at frequencies distinct from those of the noise source, which is the principal reason for the non-convergence of traditional ANC systems. The red dash line shows the spectrum power of the residual noise of the adaptive FIR-LMS filter, in which the amplitude of the high-frequency signals is quite large. The green solid line and the purple solid line respectively depict the residual signal spectrum of ANFN-LMS and ANFN-VSS-LMS controllers. This result verifies that the proposed ANFN control method is more reliable.
Figure 22a illustrates the learning weights of the ANFN-LMS controller, while
Figure 22b shows those of the ANFN-VSS-LMS controller. These figures further demonstrate the reliability and effectiveness of employing a variable step size in the VSS-LMS algorithm.
Similar to cases 2 and 3, in this case, we also address the RMSE indices presented in
Table 7 and the ANR shown in
Figure 23 to further validate the reliability of the proposed system. Based on these results, we can confirm that the proposed ANC system demonstrates high reliability in nonlinear environments.



 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}