
Intra-Technology Enhancements for Multi-Service Multi-Priority Short-Range V2X Communication




Abstract
1. Introduction
- Intra-technology enhancement for ITS-G5: Introduces an adaptive AC selection mechanism for ITS-G5, offering a significant advancement in prioritizing different types of C-ITS messages and optimizing the V2X communication performance in terms of latency, Packet Reception Ratio (PRR) and reliability.
- Intra-technology enhancement for C-V2X PC5: Develops an adaptive RRI selection mechanism to enable dynamic, need-based prioritization of C-ITS message types, ensuring efficient resource utilization and timely delivery of critical messages.
- Priority-Aware Rate Control Beyond Reactive DCC: Overcomes the inefficiencies of traditional DCC by introducing a priority-aware variable rate-control mechanism that accounts for CBR, vehicle speed and message priority, thereby achieving a performance-driven approach to congestion control.
2. Related Work
2.1. ITS-G5: EDCA Access Categories and Congestion Control
2.2. C-V2X PC5: RRI and Congestion Control
3. Standardized Approaches for Prioritization and Congestion Control in ETSI/3GPP Standards
3.1. Traffic Prioritization in ITS-G5 and C-V2X PC5
3.2. Congestion Control in ITS-G5 and C-V2X PC5
3.2.1. ETSI ITS-G5 Decentralized Congestion Control (DCC)
3.2.2. C-V2X and NR-V2X Congestion Control
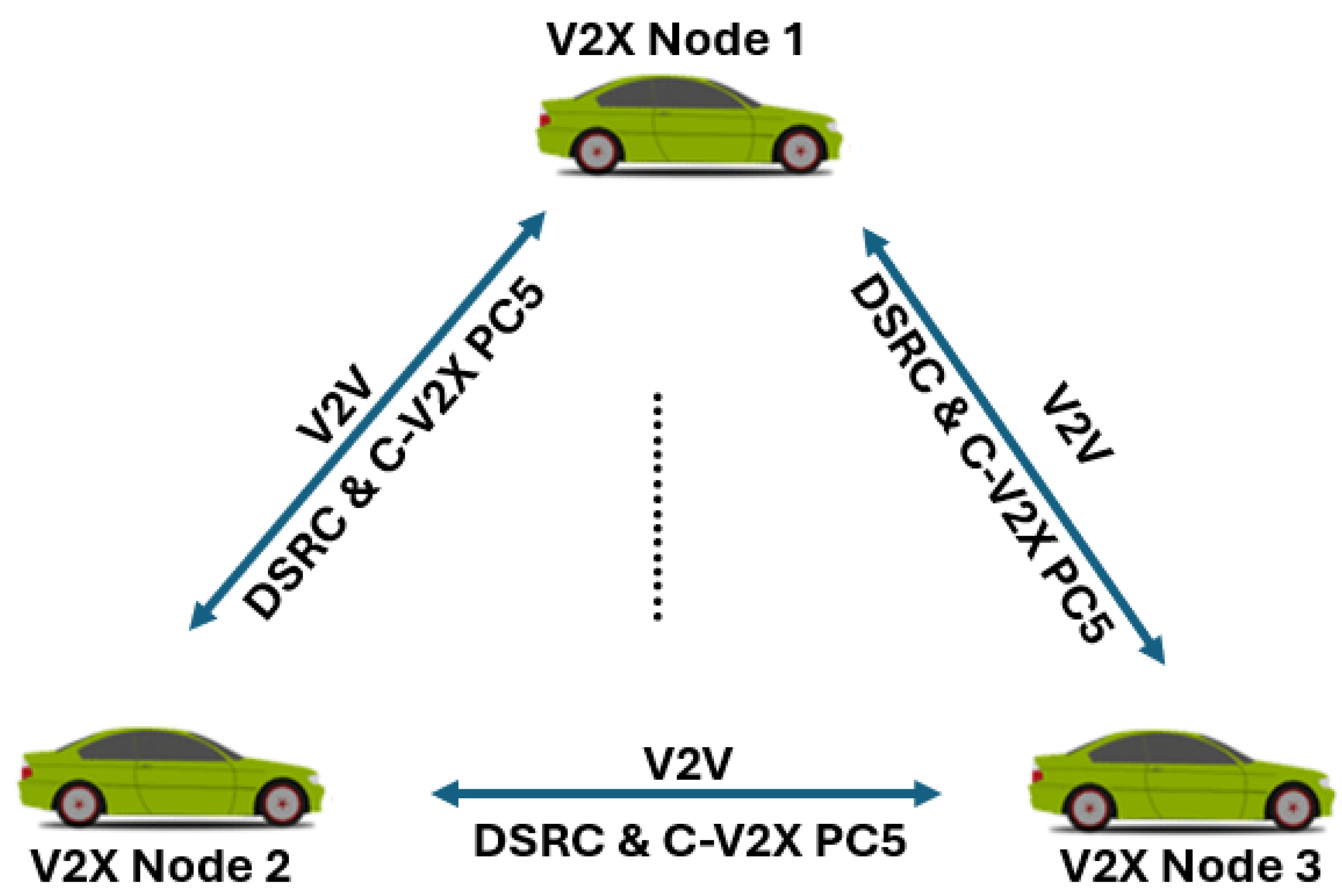
4. System Model and Problem Statement
- Each V2X node is equipped with ITS-G5 and C-V2X PC5;
- Each V2X node sends periodic CAMs;
- Each V2X node temporarily sends event-driven messages (HPDs, DENMs) or other LPMs.
5. Proposed Enhancements for Short-Range V2X Communication Technologies
5.1. ITS-G5 Access Category (AC) Selection
| Algorithm 1 Adaptive Access Category Selection-ITS-G5 |
5.2. C-V2X PC5 Resource Reservation Interval (RRI) Selection
| Algorithm 2 Adaptive RRI Selection - C-V2X PC5 |
|
5.3. Priority-Aware Rate Adaptation
| Algorithm 3 Priority-Aware Rate Adaptation—ITS-G5 and C-V2X PC5 |
6. Simulation Setup and Description of Scenarios
6.1. Simulation Setup
6.2. Description of Scenarios
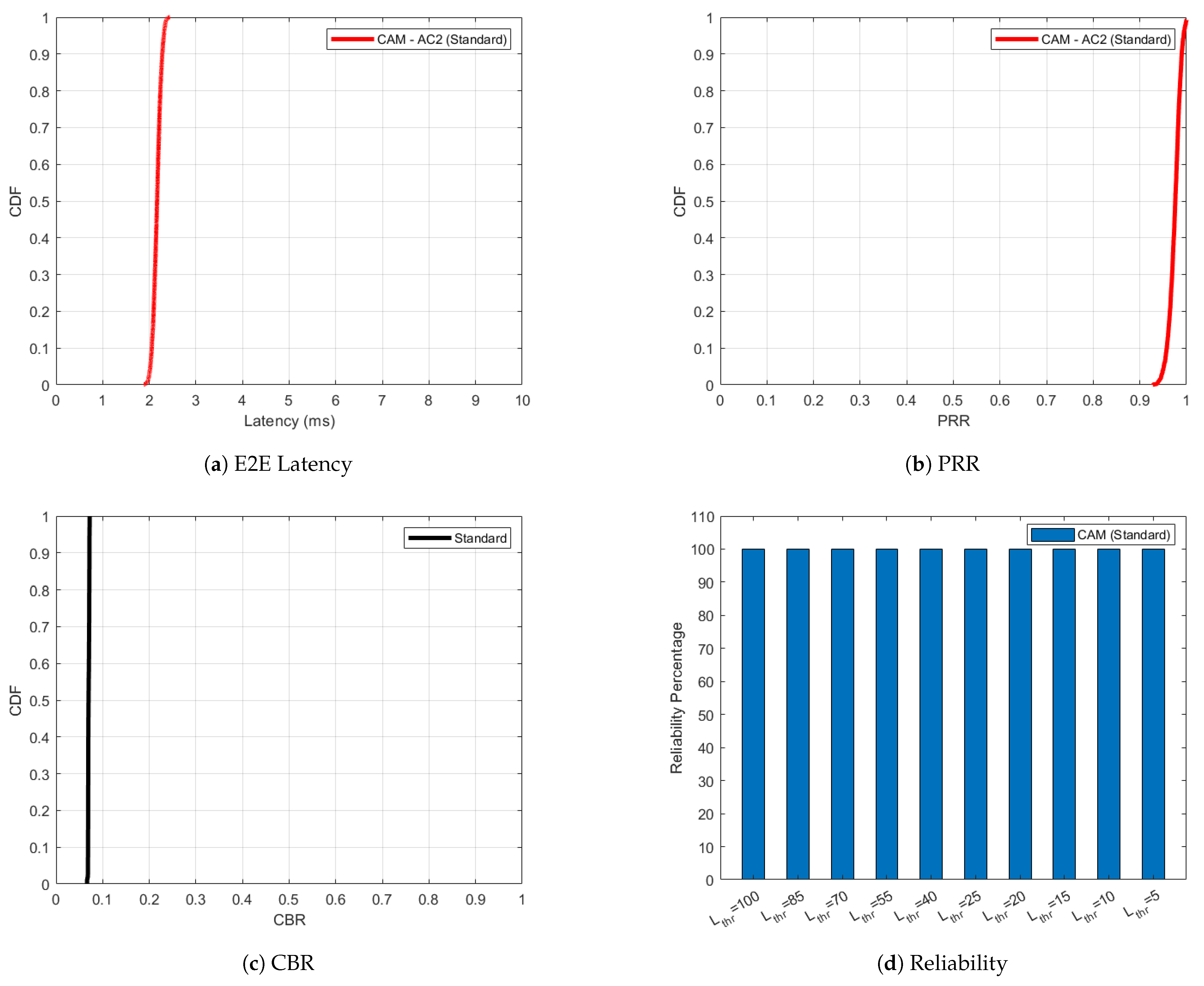
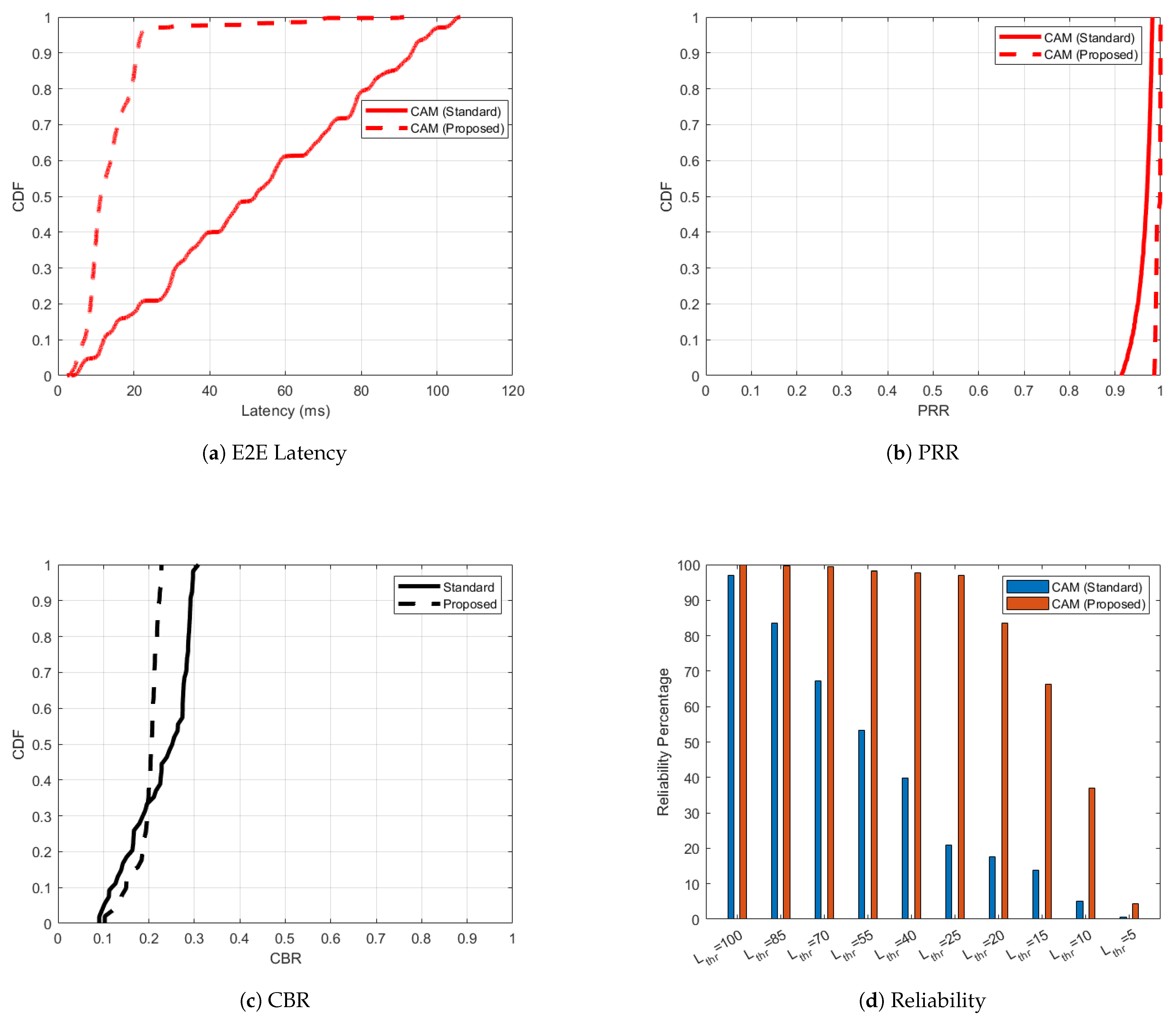
- Scenario 1 (Low-Congestion): All nodes transmit only CAMs, resulting in minimal network congestion. This scenario provides a benchmark for performance metrics such as one-way end-to-end latency, PRR and reliability in an ideal, low-contention environment.
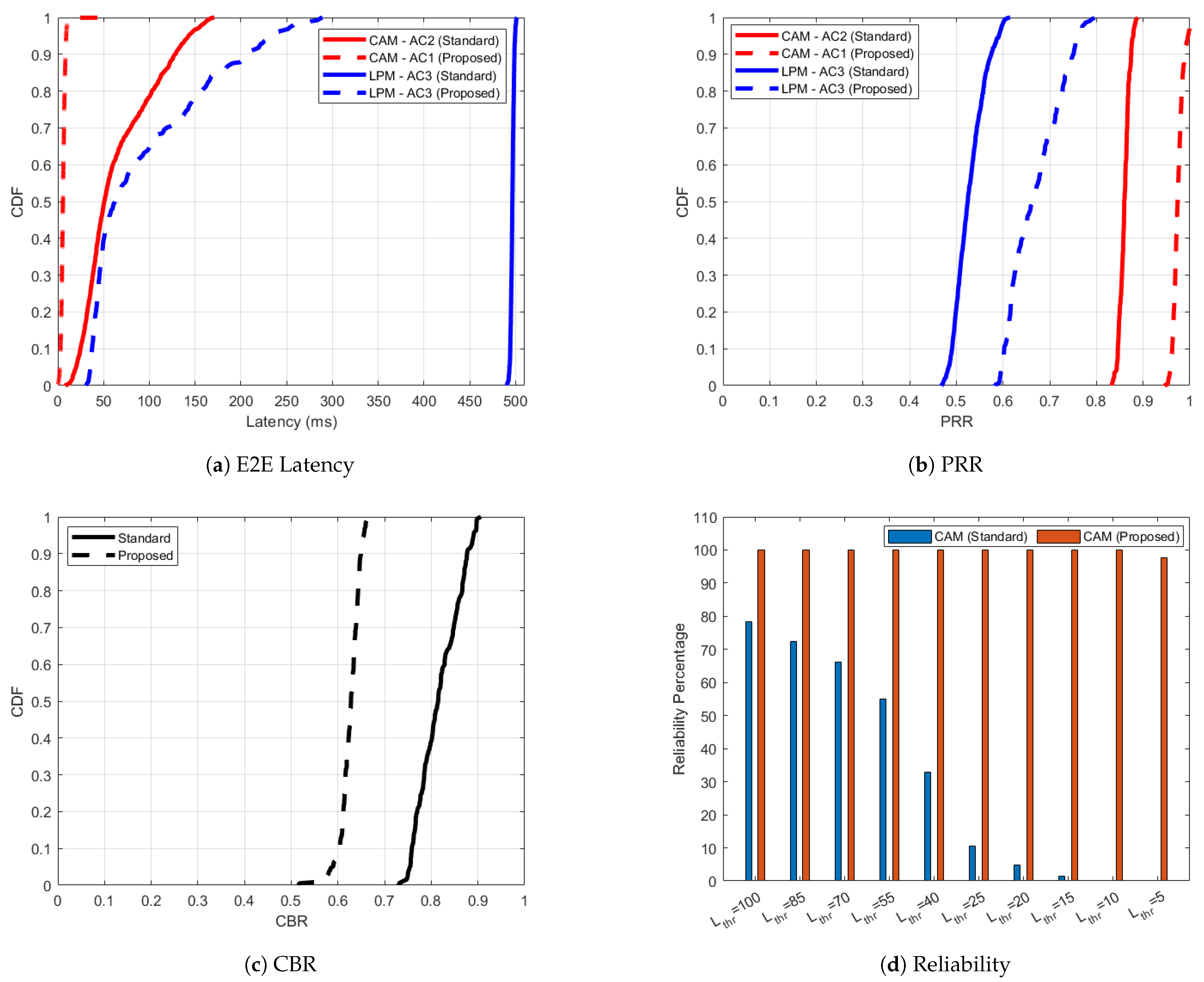
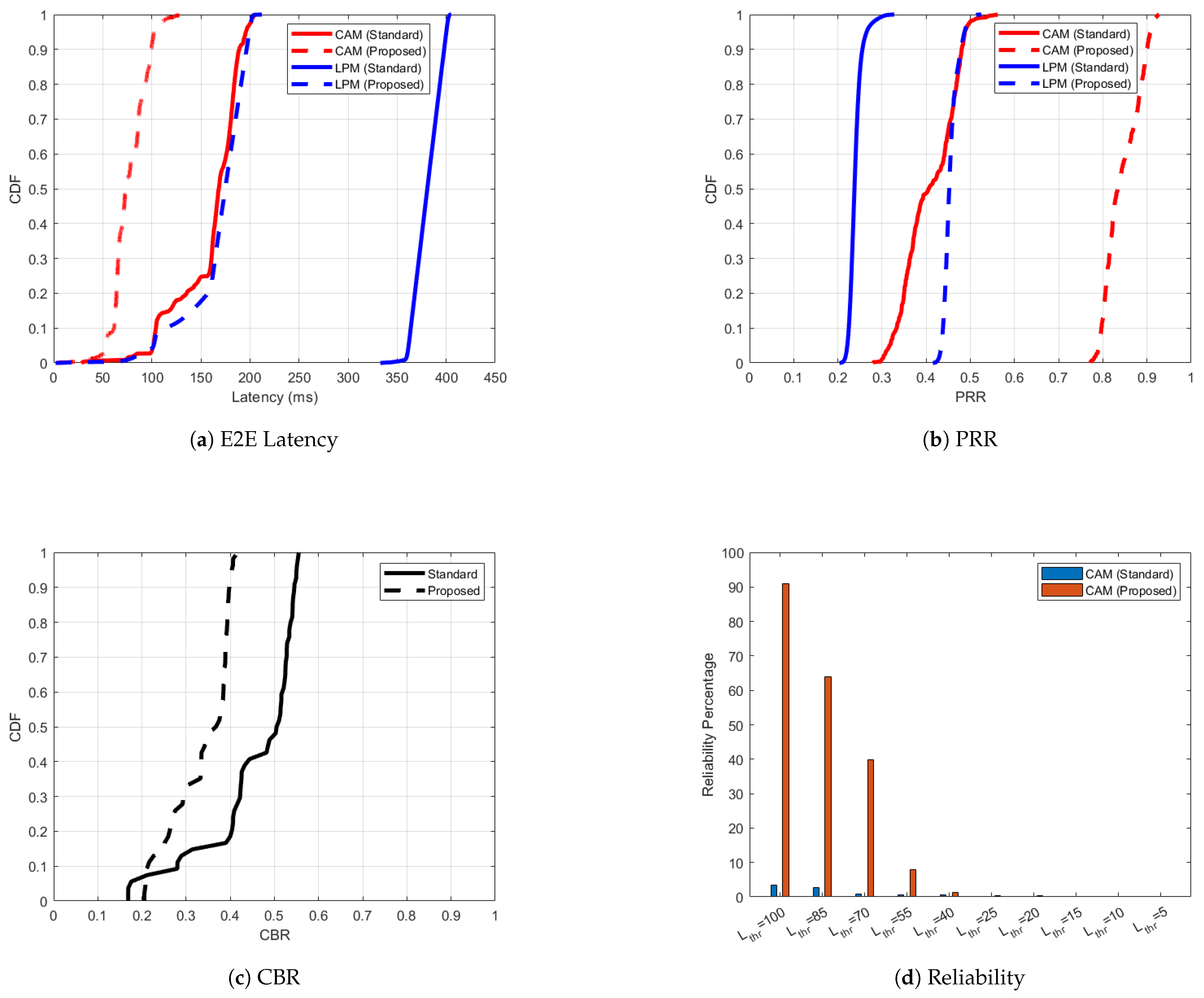
- Scenario 2 (Moderate-Congestion with LPMs): All nodes send periodic CAMs alongside high-intensity LPM messages, creating a significantly congested environment. This setup evaluates the adaptive algorithm’s performance under moderate-to-high network contention, focusing on scenarios where LPMs dominate alongside CAMs.
- Scenario 3 (High-Congestion with DENMs and LPMs): Along with CAMs and LPMs, 20% of the nodes also transmit DENMs. This scenario simulates a congested network where high-priority messages (DENMs) must compete for resources in the presence of CAMs and LPMs, providing critical insights into the adaptive algorithm’s ability to prioritize high-importance messages effectively.
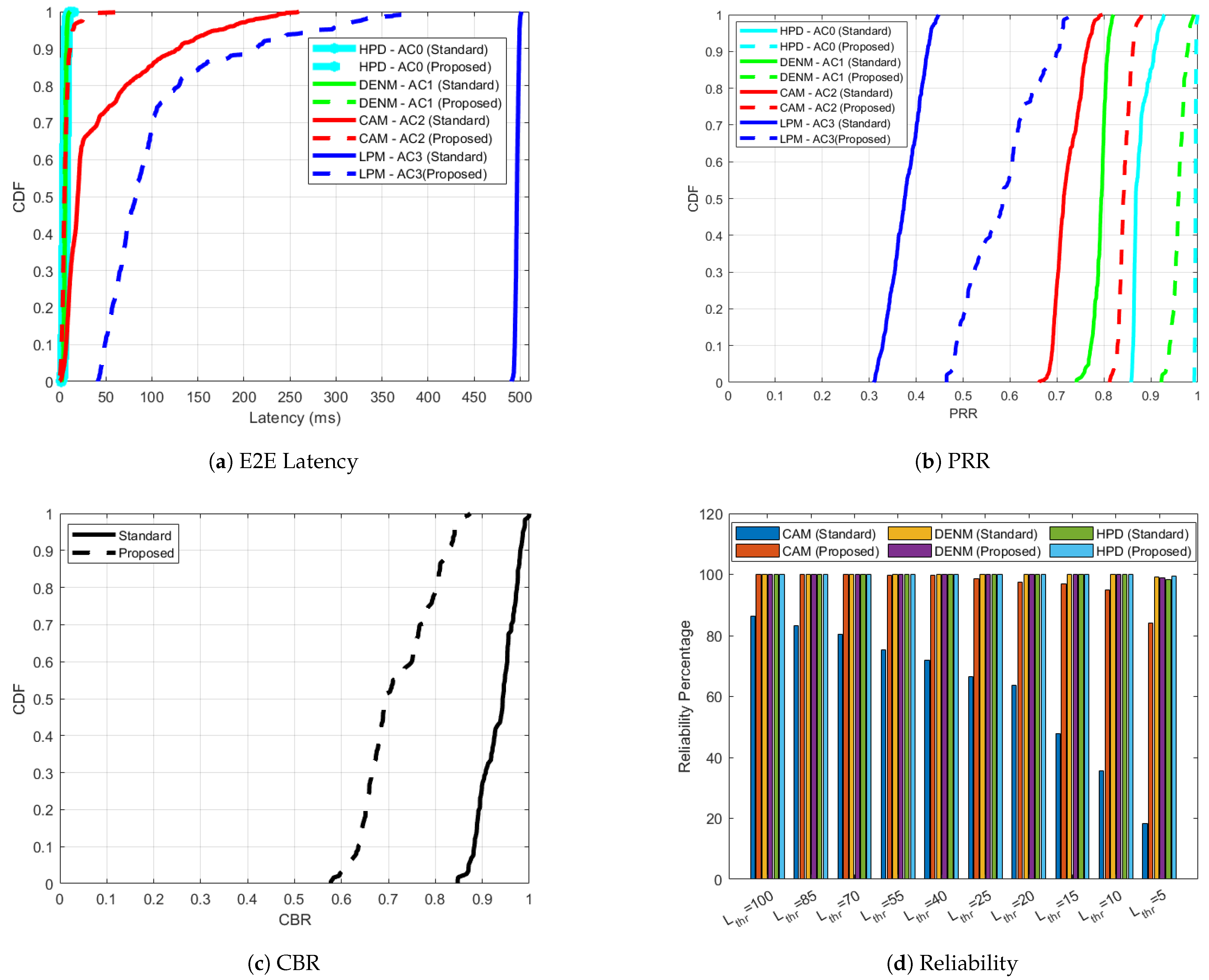
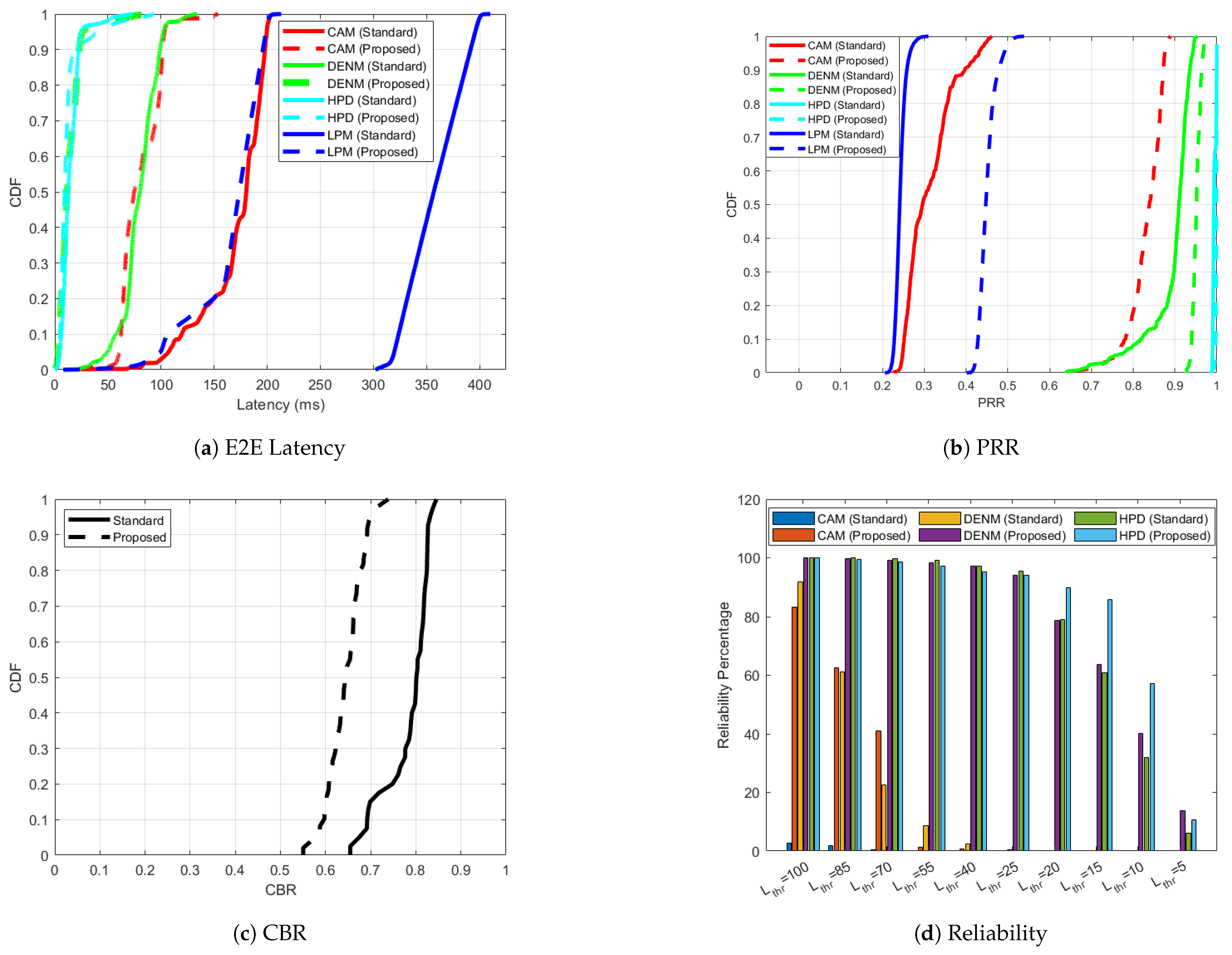
- Scenario 4 (Extreme-Congestion with All Message Types): All nodes transmit CAMs and LPMs, while 20% of the nodes also transmit DENMs and 20% transmit HPDs. This scenario represents a worst-case scenario with all four message types in operation, utilizing all ITS-G5 ACs and C-V2X PC5 RRI levels. Although rare in real-world applications, this stress test is vital to ensuring that the proposed algorithms maintain robustness and efficiency under extreme contention conditions.
7. Results and Analysis
7.1. ITS-G5
7.2. C-V2X PC5
8. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABR | Average Blocking Rate |
| AIFSN | Arbitration Inter-frame Space Number |
| BSM | Basic Safety Message |
| CA | Cooperative Awareness |
| CAGR | Compound Annual Growth Rate |
| CAM | Cooperative Awareness Message |
| CBR | Channel Busy Ratio |
| C-ITS | Cooperative Intelligent Transport Systems |
| DENM | Decentralized Environmental Notification Message |
| DSRC | Direct Short Range Communication |
| EDCA | Enhanced Distribution Channel Access |
| IPG | Inter-Packet Gap |
| IPT | Inter-Packet Time |
| ITS-G5 | Intelligent Transportation Systems-G5 |
| KPI | Key Performance Indicators |
| LPM | Low Priority Message |
| PDR | Packet Delivery Rate |
| PPPP | ProSe Per Packet Priority |
| V2I | Vehicle-to-Infrastructure |
| V2N | Vehicle-to-Network |
| V2P | Vehicle-to-Pedestrian |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
References
- Connected Cars Market (By Technology: 3G, 4G/LTE, 5G; By Connectivity Solution: Integrated, Embedded, Tethered; By Service: Driver Assistance, Safety, Entertainment, Well-being Vehicle Management, Mobility Management; By End Use: OEM, Aftermarket)—Global Industry Analysis, Size, Share, Growth, Trends, Regional Outlook, and Forecast 2024–2034, Precendence Research. 2024. Available online: https://www.precedenceresearch.com/connected-cars-market (accessed on 24 February 2025).
- Saving Lives: Boosting Car Safety in the EU: Reporting on the Monitoring and Assessment of Advanced Vehicle Safety Features, Their Cost Effectiveness and Feasibility for the Review of the Regulations on General Vehicle Safety and on the Protection of Pedestrians and Other Vulnerable Road Users; document 52016DC0787; European Commission: Brussels, Belgium, 2016.
- ETSI TS 102 636-4-2; V1.1.1—Intelligent Transport Systems (ITS); Vehicular Communications; GeoNetworking; Part 4: Geographical Addressing and Forwarding for Point-to-Point and Point-to-Multipoint Communications; Sub-Part 2: Media-Dependent Functionalities for ITS-G5. ETSI standard: Sofia, France, 2013.
- ETSI TS 102 687; V1.2.1—Intelligent Transport Systems (ITS ); Decentralized Congestion Control Mechanisms for Intelligent Transport Systems Operating in the 5 GHz Range. ETSI standard: Sofia, France, 2018.
- ETSI TS 103 574; V0.3.1—Intelligent Transport Systems (ITS); Access Layer Part; Congestion Control for the Cellular: V2X PC5 Interface. ETSI standard: Sofia, France, 2018.
- ETSI EN 303 613; V1.1.1—Intelligent Transport Systems (ITS); LTE-V2X Access Layer Specification for Intelligent Transport Systems Operating in the 5 GHz Frequency Band. ETSI standard: Sofia, France, 2020.
- Khan, M.I.; Sesia, S.; Harri, J. In vehicle resource orchestration for multi-V2X services. In Proceedings of the IEEE 90th Vehicular Technology Conference (VTC-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar]
- Khan, M.I.; Härri, J.; Sesia, S. Enhancing ETSI DCC for Multi-Service Vehicular Safety Communication. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–5. [Google Scholar]
- Alsmirat, M.A.; Al-Rifai, S.Y.; Sababha, B.H. Reducing Message Loss in DSRC Networks using Dynamic Distribution of Safety Messages over EDCA Access Categories. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 21–23 October 2015; Volume 2. [Google Scholar]
- Khan, M.I.; Sepulcre, M.; Härri, J. Cooperative wireless congestion control for multi-service V2X communication. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October 2020–13 November 2020; pp. 1357–1363. [Google Scholar]
- Salem, M.A.; Tarrad, I.F.; Youssef, M.I.; Abd El-kader, S.M. An adaptive EDCA selfishness-aware scheme for dense WLANs in 5G networks. IEEE Access 2020, 8, 47034–47046. [Google Scholar] [CrossRef]
- Rekik, L.M.; Bourenane, M. Logical EDCA: A Novel EDCA mechanism for IEEE 802.11 based Networks. In Proceedings of the 2020 Second International Conference on Embedded & Distributed Systems (EDiS), Oran, Algeria, 3 November 2020; pp. 99–104. [Google Scholar]
- Sharafkandi, S.; Bansal, G.; Kenney, J.B.; Du, D.H. Using EDCA to improve vehicle safety messaging. In Proceedings of the 2012 IEEE Vehicular Networking Conference (VNC), Seoul, South of Korea, 14–16 November 2012; pp. 70–77. [Google Scholar]
- Sepulcre, M.; Mira, J.; Thandavarayan, G.; Gozalvez, J. Is Packet Dropping a Suitable Congestion Control Mechanism for Vehicular Networks? In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020.
- Bazzi, A.; Cecchini, G.; Masini, B.M.; Zanella, A. Should i Really Care of That CAM? In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 1–6. [Google Scholar]
- J2945/1; On-Board System Requirements for v2v Safety Communications. SAE International: Warrendale, PA, USA, 2016.
- Bansal, G.; Kenney, J.B.; Rohrs, C.E. LIMERIC: A linear adaptive message rate algorithm for dsrc congestion control. IEEE Trans. Veh. Technol. 2013, 62, 4182–4197. [Google Scholar] [CrossRef]
- Fallah, Y.P.; Nasiriani, N.; Krishnan, H. Stable and fair power control in vehicle safety networks. IEEE Trans. Veh. Technol. 2016, 65, 1662–1675. [Google Scholar] [CrossRef]
- Toghi, B.; Saifuddin, M.; Fallah, Y.P.; Mughal, M.O. Analysis of distributed congestion control in cellular vehicle-to-everything networks. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–7. [Google Scholar]
- Toghi, B.; Saifuddin, M.; Mughal, M.O.; Fallah, Y.P. Spatiotemporal dynamics of cellular v2x communication in dense vehicular networks. In Proceedings of the 2019 IEEE 2nd Connected and Automated Vehicles Symposium (CAVS), Honolulu, HI, USA, 22–23 September 2019; pp. 1–5. [Google Scholar]
- Yoon, Y.; Kim, H. Balancing Power and Rate Control for Improved Congestion Control in Cellular V2X Communication Environments. IEEE Access 2020, 8, 105071–105081. [Google Scholar] [CrossRef]
- Choi, J.; Kim, H. A QoS-Aware Congestion Control Scheme for CV2X Safety Communications. In Proceedings of the 2020 IEEE Vehicular Networking Conference, VNC, New York, NY, USA, 16–18 December 2020; pp. 23–26. [Google Scholar]
- Lu, Q.; Jung, H.; Kim, K.D. Optimization-based approach for resilient connected and autonomous intersection crossing traffic control under V2X communication. IEEE Trans. Intell. Veh. 2021, 7, 354–367. [Google Scholar] [CrossRef]
- McCarthy, B.; O’Driscoll, A. Adapting the resource reservation interval for improved congestion control in nr v2x. In Proceedings of the IEEE 23rd International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Belfast, UK, 14–17 June 2022; pp. 261–270. [Google Scholar]
- McCarthy, B.; O’Driscoll, A. RRI Adaptive: A Standards Compliant Approach for Equitable and Stable Congestion Control in C-V2X Networks. In Proceedings of the 6th International Conference on Advanced Communication Technologies and Networking (CommNet), Rabat, Morocco, 11–13 December 2023; pp. 1–8. [Google Scholar]
- Mansouri, A.; Martinez, V.; Harri, J. A First Investigation of Congestion Control for LTE-V2X Mode 4. In Proceedings of the 2019 15th Annual Conference on Wireless On-demand Network Systems and Services, WONS 2019-Proceedings, Wengen, Switzerland, 22–24 January 2019; pp. 56–63. [Google Scholar]
- Wendland, P.; Schaefer, G.; Thoma, R.S. LTE-V2X Mode 4: Increasing robustness and DCC compatibility with reservation splitting. In Proceedings of the 2019 8th IEEE International Conference on Connected Vehicles and Expo, ICCVE 2019-Proceedings, Graz, Austria, 4–8 November 2019; pp. 1–6. [Google Scholar]
- Hu, J.; Zhao, L.; Feng, Y.; Liu, Y.; Gao, M. Research, implementation and practice of congestion control mechanism in lte-v2x. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference (VTC2022-Fall), London, UK, 26–29 September 2022; pp. 1–5. [Google Scholar]
- Molina-Masegosa, R.; Sepulcre, M.; Gozalvez, J.; Berens, F.; Martinez, V. Empirical models for the realistic generation of cooperative awareness messages in vehicular networks. IEEE Trans. Veh. Technol. 2020, 69, 5713–5717. [Google Scholar] [CrossRef]
- Study on LTE-Based V2X Services (v14.0.0, Release 14), 3GPP, July 2016, 3GPP Technical Report 36.885. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2934 (accessed on 24 February 2025).
- Burbano-Abril, A.; McCarthy, B.; Lopez-Guerrero, M.; Rangel, V.; O’Driscoll, A. MCS adaptation within the cellular v2x sidelink. In Proceedings of the 2021 IEEE Conference on Standards for Communications and Networking (CSCN), Thessaloniki, Greece, 15–17 December 2021; pp. 111–117. [Google Scholar]
- Trabelsi, A.D.; Marouane, H.; Zarai, F.; Meddeb-Makhlouf, A. Dynamic scheduling algorithm based on priority assignment for LTE-V2X vehicular networks. In Proceedings of the 15th IEEE International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 483–488. [Google Scholar]
- Kang, B.; Yang, J.; Paek, J.; Bahk, S. ATOMIC: Adaptive transmission power and message interval control for C-V2X mode 4. IEEE Access 2021, 9, 12309–12321. [Google Scholar] [CrossRef]
- Bartoletti, S.; Masini, B.M.; Martinez, V.; Sarris, I.; Bazzi, A. Impact of the generation interval on the performance of sidelink C-V2X autonomous mode. IEEE Access 2021, 9, 35121–35135. [Google Scholar] [CrossRef]
- Wang, Y.; Dou, Z. Optimization of C-V2X Mode 4 Resource Scheduling Protocol Based on CAM Generation Frequency. In Proceedings of the 5th International Conference on Information Science, Parallel and Distributed Systems (ISPDS), Guangzhou, China, 31 May–2 June 2024; pp. 132–135. [Google Scholar]
- Banitalebi, N.; Azmi, P.; Mokari, N.; Arani, A.H.; Yanikomeroglu, H. Distributed learning-based resource allocation for self-organizing C-V2X communication in cellular networks. IEEE Open J. Commun. Soc. 2022, 3, 1719–1736. [Google Scholar] [CrossRef]
- Amador, O.; Soto, I.; Uruena, M.; Calderon, M. GoT: Decreasing DCC queuing for CAM messages. IEEE Commun. Lett. 2020, 24, 2974–2978. [Google Scholar] [CrossRef]
- Raviglione, F.; Carletti, C.R.; Malinverno, M.; Casetti, C.; Chiasserini, C.F. ms-van3t: An integrated multi-stack framework for virtual validation of V2X communication and services. Comput. Commun. 2024, 217, 70–86. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TC ID | AC | Channel | Maximum Transmit Power Level [dBm] | MCS | Intended Use |
|---|---|---|---|---|---|
| 0 | CCH | +33 | 6 Mbit/s | High-priority DENM | |
| 1 | CCH | +23 | 6 Mbit/s | DENM | |
| 2 | CCH | +23 | 6 Mbit/s | CAM | |
| 3 | CCH | +23 | 6 Mbit/s | Multihop DENM, Other data traffic |
| State | Packet Rate | Toff | |
|---|---|---|---|
| ≤ 0.30 | Relaxed | 10 Hz | 100 ms |
| 0.30 < ≤ 0.40 | Active 1 | 5 Hz | 200 ms |
| 0.40 < ≤ 0.50 | Active 2 | 2.5 Hz | 400 ms |
| 0.50 < ≤ 0.60 | Active 3 | 2 Hz | 500 ms |
| > 0.60 | Restrictive | 1 Hz | 1000 ms |
| Variable(s) | Description |
|---|---|
| , , , | Voice, Video, Best Effort and Background access categories |
| , , , | the selected access category for CAM, DENM, HPD and LPM packets |
| , , , | binary variables representing transmission status of CAM, DENM, HPD and LPM packets |
| , , , | binary variables representing reception status of CAM, DENM, HPD and LPM packets |
| , , , | Selected RRIs for CAM, DENM, HPD and LPM packets |
| the one-way end-to-end latency via ITS-G5 for message type X | |
| the one-way end-to-end latency via C-V2X PC5 for message type X | |
| , | generation timestamp for C-ITS message type X |
| , | reception timestamp for C-ITS message type X |
| , , , | total number of CAM, DENM, HPD and LPM packets received via ITS-G5 |
| , , , | total number of CAM, DENM, HPD and LPM packets received via C-V2X PC5 |
| , , , | total number of CAM, DENM, HPD and LPM packets transmitted via ITS-G5 |
| , , , | total number of CAM, DENM, HPD and LPM packets transmitted via C-V2X PC5 |
| Packet Reception Ratio via ITS-G5 for message type X | |
| Packet Reception Ratio via C-V2X PC5 for message type X | |
| C-ITS message reliability via ITS-G5 for message type X | |
| C-ITS message reliability via C-V2X PC5 for message type X | |
| one-way end-to-end latency threshold for reliability evaluation | |
| , , | CBR thresholds 1, 2 and 3 |
| , , , | the standard Access Category for CAM, DENM, HPD and LPM packets |
| sliding time window duration in milliseconds | |
| , , , | transmission frequency of CAM, DENM, HPD and LPM packets |
| , | minimum and maximum possible frequency |
| min-max normalized value of speed of the V2X node |
| CBR-Based PSSCH Transmission Parameter Configuration | PPPP1-PPPP2 | PPPP3-PPPP5 | PPPP6-PPPP8 |
|---|---|---|---|
| CBR Measured | CR Limit | CR Limit | CR Limit |
| 0 ≤ CBR measured ≤ 0.3 | No limit | No limit | No limit |
| 0.3 < CBR measured ≤ 0.65 | No limit | 0.03 | 0.02 |
| 0.65 < CBR measured≤ 0.8 | 0.02 | 0.006 | 0.004 |
| 0.8 < CBR measured ≤ 1 | 0.02 | 0.003 | 0.002 |
| Ref. | Technologies Considered | AC Allocation | RRI Allocation | Congestion Control | ITS Services Considered | ||||
|---|---|---|---|---|---|---|---|---|---|
| PC5 | ITS-G5/DSRC | CAM/BSM | DENM | HPD | LPM/CPM | ||||
| [7] | × | ITS-G5 | Static | × | priority-aware | ✓ | ✓ | × | ✓ |
| [8] | × | ITS-G5 | Static | × | standardized | ✓ | × | × | ✓ |
| [9] | × | DSRC | Adaptive | × | standardized | ✓ | × | × | × |
| [10] | × | ITS-G5 | Static | × | priority-aware | ✓ | ✓ | × | ✓ |
| [11] | × | EDCA | Adaptive | × | standardized | × | × | × | × |
| [12] | × | EDCA | CW, AIFSN | × | priority-aware (single AC) | × | × | × | × |
| [13] | × | DSRC | CW, AIFSN | × | × | × | × | × | × |
| [14] | × | ITS-G5 | Static | × | standardized | ✓ | × | × | ✓ |
| [19] | mode 4 | × | × | Static | rate, power | × | × | × | × |
| [24] | mode 4 | × | × | Adaptive | standardized | ✓ | × | × | × |
| [25] | mode 4 | × | × | Adaptive | standardized | ✓ | × | × | × |
| [26] | mode 4 | × | × | × | standardized | ✓ | × | × | × |
| [27] | mode 4 | × | × | Static | standardized | ✓ | × | × | × |
| [28] | mode 4 | × | × | Static | standardized | ✓ | × | × | × |
| [32] | mode 3 | × | × | Static | standardized | × | × | × | × |
| [33] | mode 4 | × | × | Static | rate, power | ✓ | × | × | × |
| [34] | mode 4 | × | × | Static | speed-based rate | ✓ | × | × | × |
| [35] | mode 4 | × | × | Static | standardized | ✓ | × | × | × |
| This work | mode 4 | ITS-G5 | Adaptive | Adaptive | priority-aware | ✓ | ✓ | ✓ | ✓ |
| TC | PPPP | Intended Use |
|---|---|---|
| 0 | 2 | High Priority DENMs |
| 1 | 4 | Normal DENMs |
| 2 | 5 | CAMs |
| 3 | 6 | Forwarded DENMs and other low priority messages |
| Parameter | Value |
|---|---|
| Vehicular scenario | |
| Road length | 3000 m |
| No. of vehicles | 10 |
| No. of lanes | 1 |
| Vehicle speed (max) | 35 km/h, 120 km/h |
| Vehicle mobility | SUMO |
| Application layer | |
| Packet size—CAM | 126 bytes |
| Packet size—DENM/HPD | 141 bytes |
| Packet size—LPM (ITS-G5) | 1850 bytes |
| Packet size—LPM (C-V2X PC5) | 123 bytes |
| Default transmission frequency—CAM/DENM/HPD | 10 Hz |
| Default transmission frequency—LPM (ITS-G5) | 200 Hz |
| Default transmission frequency—LPM (C-V2X PC5) | 500 Hz |
| MAC and PHY layer—ITS-G5 | |
| Carrier frequency | 5.9 GHz |
| Channel bandwidth | 10 MHz |
| RSSI threshold | −94 dBm |
| Tx Power | 23 dBm |
| Propagation model | Log Distance |
| Data Rate | 6 Mbps |
| Modulation Scheme | OFDM |
| QoS/NQoS WaveMacHelper | QoS (for EDCA) |
| CBR thresholds (, , ) | 0.25, 0.50, 0.75 |
| MAC and PHY layer—CV2X PC5 | |
| Carrier frequency | 5.9 GHz |
| Channel bandwidth | 10 MHz |
| No. of subchannels | 1 |
| Subchannel size | 50 Resource Blocks |
| Resource keep probability | 0 |
| RSSI threshold | −90 dBm |
| Tx Power | 33 dBm |
| Propagation model | Log Distance |
| MCS | 20 |
| HARQ enabled | false |
| Subchannelization scheme | Adjacency-PSCCH-PSSCH |
| Noise Figure | 9 dB |
| CBR thresholds (, , ) | 0.25, 0.50, 0.75 |
| CAM | LPM | DENM | HPD | |
|---|---|---|---|---|
| Scenario 1 | ✓(100%) | X | X | X |
| Scenario 2 | ✓(100%) | ✓(100%) | X | X |
| Scenario 3 | ✓(100%) | ✓(100%) | ✓(20%) | X |
| Scenario 4 | ✓(100%) | ✓(100%) | ✓(20%) | ✓(20%) |
| KPI | Message Type | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | ||||
|---|---|---|---|---|---|---|---|---|---|
| Standard | Proposed | Standard | Proposed | Standard | Proposed | Standard | Proposed | ||
| Latency (ms) | CAM | 2.31 | – | 142.81 | 4.14 | 118.04 | 3.38 | 168.6 | 10.35 |
| LPM | – | – | 499.54 | 234.12 | 500.4 | 360.01 | 499.36 | 283.62 | |
| DENM | – | – | – | – | 4.99 | 3.5 | 3.94 | 3.55 | |
| HPD | – | – | – | – | – | – | 4.12 | 3.31 | |
| PRR | CAM | 0.99 | – | 0.87 | 0.99 | 0.81 | 0.96 | 0.77 | 0.87 |
| LPM | – | – | 0.59 | 0.76 | 0.53 | 0.73 | 0.43 | 0.71 | |
| DENM | – | – | – | - | 0.96 | 0.98 | 0.81 | 0.98 | |
| HPD | – | – | – | – | – | – | 0.91 | 0.99 | |
| CBR | – | 0.07 | – | 0.89 | 0.65 | 0.94 | 0.73 | 0.98 | 0.84 |
| KPI | Message Type | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | ||||
|---|---|---|---|---|---|---|---|---|---|
| Standard | Proposed | Standard | Proposed | Standard | Proposed | Standard | Proposed | ||
| Latency (ms) | CAM | 2.22 | – | 157.12 | 6.91 | 129.93 | 6.90 | 199.84 | 30.53 |
| LPM | – | – | 499.64 | 227.18 | 500.1 | 353.26 | 499.82 | 287.79 | |
| DENM | – | – | – | – | 8.43 | 6.84 | 8.11 | 7.63 | |
| HPD | – | – | – | – | – | – | 7.59 | 7.52 | |
| PRR | CAM | 0.79 | – | 0.74 | 0.89 | 0.71 | 0.86 | 0.67 | 0.86 |
| LPM | – | – | 0.52 | 0.74 | 0.41 | 0.65 | 0.34 | 0.61 | |
| DENM | – | – | – | - | 0.84 | 0.92 | 0.73 | 0.87 | |
| HPD | – | – | – | – | – | – | 0.81 | 0.95 | |
| CBR | – | 0.05 | – | 0.71 | 0.51 | 0.77 | 0.57 | 0.79 | 0.59 |
| KPI | Message Type | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | ||||
|---|---|---|---|---|---|---|---|---|---|
| Standard | Proposed | Standard | Proposed | Standard | Proposed | Standard | Proposed | ||
| Latency (ms) | CAM | 97.78 | 21.99 | 195.41 | 102.13 | 198.42 | 102.05 | 199.84 | 103.55 |
| LPM | – | – | 399.32 | 199.4 | 398.82 | 199.01 | 394.35 | 198.22 | |
| DENM | – | – | – | – | 103.17 | 27.36 | 102.3 | 26.32 | |
| HPD | – | – | – | – | – | – | 39.65 | 24.82 | |
| PRR | CAM | 0.98 | 0.99 | 0.49 | 0.91 | 0.45 | 0.88 | 0.43 | 0.88 |
| LPM | – | – | 0.27 | 0.49 | 0.26 | 0.49 | 0.27 | 0.48 | |
| DENM | – | – | – | - | 0.84 | 0.99 | 0.94 | 0.97 | |
| HPD | – | – | – | – | – | – | 0.99 | 1 | |
| CBR | – | 0.31 | 0.22 | 0.55 | 0.41 | 0.66 | 0.44 | 0.84 | 0.71 |
| KPI | Message Type | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | ||||
|---|---|---|---|---|---|---|---|---|---|
| Standard | Proposed | Standard | Proposed | Standard | Proposed | Standard | Proposed | ||
| Latency (ms) | CAM | 103.51 | 24.51 | 182.99 | 99.99 | 202.98 | 103.98 | 189.82 | 103.78 |
| LPM | – | – | 401.41 | 192.42 | 401.42 | 193.15 | 403.81 | 199.15 | |
| DENM | – | – | – | – | 103.12 | 28.91 | 102.21 | 24.26 | |
| HPD | – | – | – | – | – | – | 36.22 | 32.76 | |
| PRR | CAM | 0.86 | 0.96 | 0.47 | 0.77 | 0.41 | 0.74 | 0.34 | 0.61 |
| LPM | – | – | 0.20 | 0.42 | 0.21 | 0.40 | 0.20 | 0.40 | |
| DENM | – | – | – | – | 0.81 | 0.84 | 0.66 | 0.73 | |
| HPD | – | – | – | – | – | – | 0.90 | 0.97 | |
| CBR | – | 0.14 | 0.13 | 0.53 | 0.36 | 0.6 | 0.40 | 0.83 | 0.69 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khalid, I.; Maglogiannis, V.; Naudts, D.; Shahid, A.; Moerman, I. Intra-Technology Enhancements for Multi-Service Multi-Priority Short-Range V2X Communication. Sensors 2025, 25, 2564. https://doi.org/10.3390/s25082564
Khalid I, Maglogiannis V, Naudts D, Shahid A, Moerman I. Intra-Technology Enhancements for Multi-Service Multi-Priority Short-Range V2X Communication. Sensors. 2025; 25(8):2564. https://doi.org/10.3390/s25082564
Chicago/Turabian StyleKhalid, Ihtisham, Vasilis Maglogiannis, Dries Naudts, Adnan Shahid, and Ingrid Moerman. 2025. "Intra-Technology Enhancements for Multi-Service Multi-Priority Short-Range V2X Communication" Sensors 25, no. 8: 2564. https://doi.org/10.3390/s25082564
APA StyleKhalid, I., Maglogiannis, V., Naudts, D., Shahid, A., & Moerman, I. (2025). Intra-Technology Enhancements for Multi-Service Multi-Priority Short-Range V2X Communication. Sensors, 25(8), 2564. https://doi.org/10.3390/s25082564