
Underwater Magnetic Sensors Network


Abstract
1. Introduction
2. Review of Related Works
3. Problem Statement and Research Hypothesis
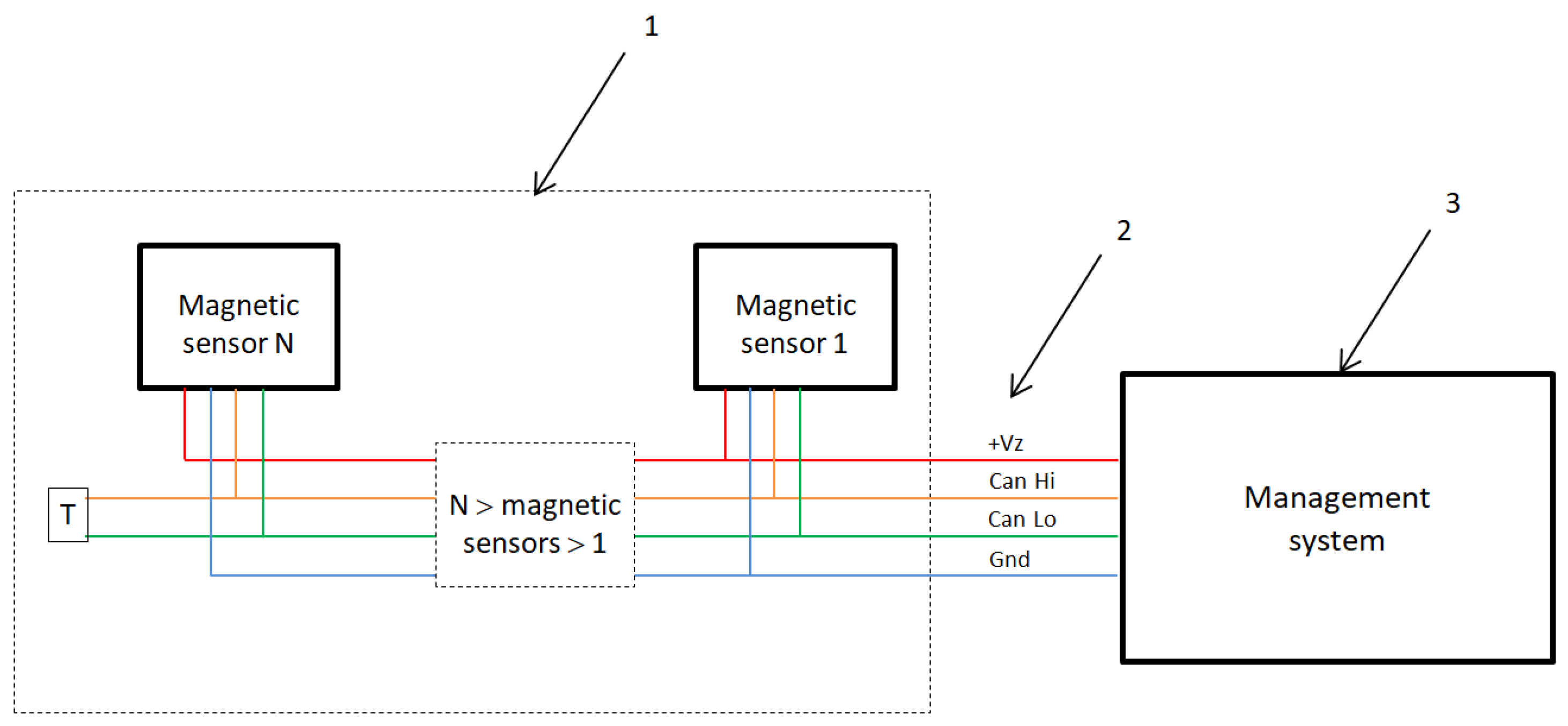
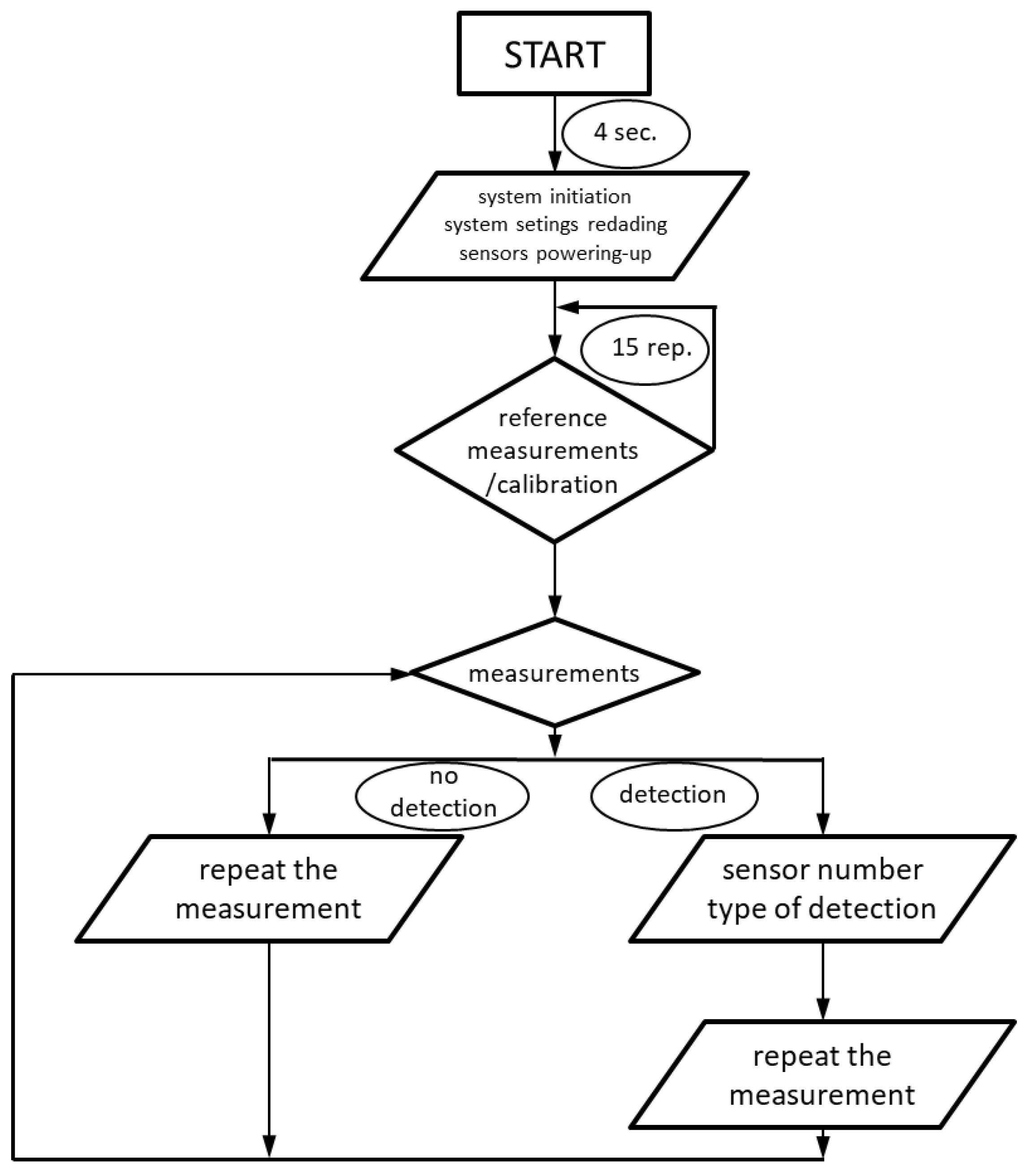
4. System Architecture and Control Algorithm
5. Tests and Measurements
5.1. Objectives of the Measurement Phase
- Validating the accuracy of the magnetic sensors after calibration.
- Evaluating tilt compensation algorithms to ensure reliable heading measurements.
- Analyzing the performance of the network in detecting magnetic anomalies under controlled underwater conditions.
5.2. Test Setup and Methodology
- A test tank equipped with magnetic field generators to produce controlled disturbances.
- Sensor nodes spaced at fixed intervals to assess spatial accuracy.
- Data logging tools for capturing sensor outputs at a sampling rate of 10 Hz.
- Calibration routines applied prior to the experiments to ensure accurate measurements.
5.3. Calibration Results
5.4. Tilt Compensation Results
5.5. Magnetic Anomaly Detection
5.6. Discussion and Observations
- Calibration significantly reduced offsets and noise, ensuring accurate magnetic field measurements.
- Tilt compensation effectively minimized heading errors, even at tilt angles up to 30°.
- The sensor network demonstrated high accuracy in detecting magnetic anomalies, with minimal error and reliable detection ranges.
- The system handled environmental factors such as noise and temperature variations well, ensuring robust performance.
- Ambient magnetic fields, though present, were effectively accounted for during calibration, ensuring accurate baseline measurements.
5.7. Real-Life Enviromental Test
5.8. Detailed Test Scenarios
- River Sections (S1, S2, S3): Focused on detecting activities on the water, such as small boats and swimmers. Included variations in speed, distance, and environmental conditions.
- Shoreline Sections (S6, S7, S8): Monitored movement along the riverbank, simulating personnel crossing at various points.
- Land Intrusions (S9, S10): Tested the detection of coordinated activities involving land-based movements in conjunction with water-based intrusions.
5.9. Results from Selected Scenarios
5.9.1. Scenario S3.1 (Daylight)
- Location: River Section 2, Shoreline Section 7, Land Section 10.
- Key Findings:
- –
- Detection on river: 10/10 attempts (100%).
- –
- Detection on shoreline: 10/10 attempts (100%).
- –
- Detection on land: 8/10 attempts (80%).
- Average Detection Rate: 93%.
- Overall Detection Effectiveness: 100%.
5.9.2. Scenario S4.2A (Nighttime)
- Location: River Sections 3–5, Shoreline Section 8, Land Section 13.
- Key Findings:
- –
- Detection on river: 24/24 attempts (100% across three sections).
- –
- Detection on shoreline: 6/6 attempts (100%).
- –
- Detection on land: 4/6 attempts (67%).
- Average Detection Rate: 93%.
- Overall Detection Effectiveness: 100%.
5.9.3. Scenario S8.2 (Nighttime)
- Location: Shoreline Section 7, Land Sections 10 and 11.
- Key Findings:
- –
- Detection on shoreline: 2/8 attempts (25%).
- –
- Detection on land: 15/16 attempts (94% across two sections).
- Average Detection Rate: 71%.
- Overall Detection Effectiveness: 100%.
5.10. Insights from Data
- Environmental Impact: Nighttime scenarios (e.g., S4.2A, S8.2) exhibited reduced detection rates on shoreline sections, likely due to low visibility and increased environmental noise Table 4.
- System Optimization: Implementation of coincidence-based rules significantly reduced false alarms and improved operator response time. Integration of geophonic sensors enhanced detection capabilities on shoreline sections.
- Scalability: The modular architecture of the sensor network facilitated seamless adaptation across various sections (P1–P4), allowing effective perimeter monitoring over extended areas.
5.11. Environmental Testing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environmental Condition | Detection Rate (%) | Response Time (s) |
|---|---|---|
| Clear | 95 | 2.5 |
| Rain | 85 | 3.0 |
| Fog | 80 | 3.5 |
6. Discussion
7. Conclusions
8. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vieira, M.; Coelho, C.; da Silva, D.; da Mata, J. A survey on wireless sensor network devices. In Proceedings of the IEEE Conference on Emerging Technologies and Factory Automation (ETFA), Lisbon, Portugal, 16–19 September 2003; pp. 537–544. [Google Scholar] [CrossRef]
- Essendorfer, B.; Monari, E.; Wanning, H. An integrated system for border surveillance. In Proceedings of the IEEE Fourth International Conference on Systems (ICONS 09), Gosier, Guadeloupe, France, 1–6 March 2009; pp. 96–101. [Google Scholar] [CrossRef]
- Luo, H.; Wu, K.; Guo, Z.; Gu, L.; Ni, L. Ship detection with wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 1336–1343. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, D.; Kim, K.; Choi, C.H.; Park, N.; Kim, H. An Efficient Compression Method of Underwater Acoustic Sensor Signals for Underwater Surveillance. Sensors 2022, 22, 3415. [Google Scholar] [CrossRef]
- Massot-Campos, M.; Oliver-Codina, G. Optical Sensors and Methods for Underwater 3D Reconstruction. Sensors 2015, 15, 31525–31557. [Google Scholar] [CrossRef] [PubMed]
- Akyildiz, I.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Esmaiel, H.; Sun, H. Underwater Wireless Communications. Sensors 2024, 24, 7075. [Google Scholar] [CrossRef]
- Fei, Z.; Li, B.; Yang, S.; Xing, C.; Chen, H.; Hanzo, L. A Survey of Multi-Objective Optimization in Wireless Sensor Networks: Metrics, Algorithms, and Open Problems. IEEE Commun. Surv. Tutor. 2017, 19, 550–586. [Google Scholar] [CrossRef]
- Kumar, S.; Kim, H. Energy Efficient Scheduling in Wireless Sensor Networks for Periodic Data Gathering. IEEE Access 2019, 7, 11410–11426. [Google Scholar] [CrossRef]
- Bao, X.; Jiang, Y.; Han, L.; Xu, X.; Zhu, H. Distributed dynamic scheduling algorithm of target coverage for wireless sensor networks with hybrid energy harvesting system. Sci. Rep. 2024, 14, 27931. [Google Scholar] [CrossRef]
- Ripka, P.; Zikmund, A. Testing and Calibration of Magnetic Sensors. Sens. Lett. 2013, 11, 44–49. [Google Scholar] [CrossRef]
- Frniak, M.; Markovic, M.; Kamencay, P.; Dubovan, J.; Benco, M.; Dado, M. Vehicle Classification Based on FBG Sensor Arrays Using Neural Networks. Sensors 2020, 20, 4472. [Google Scholar] [CrossRef]
- Marauska, S.; Jahns, R.; Greve, H.; Quandt, E.; Knöchel, R.; Wagner, B. MEMS magnetic field sensor based on magnetoelectric composites. J. Micromech. Microeng. 2012, 22, 065024. [Google Scholar] [CrossRef]
- Kumar, A.; Kaur, D. Magnetoelectric heterostructures for next-generation MEMS magnetic field sensing applications. J. Alloy. Compd. 2022, 897, 163091. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, W.; Chen, G.; Toda, M.; Koizumi, S.; Koide, Y.; Liao, M. On-chip Diamond MEMS Magnetic Sensing through Multifunctionalized Magnetostrictive Thin Film. Adv. Funct. Mater. 2023, 33, 2300805. [Google Scholar] [CrossRef]
- Pathak, V.; Singh, K.; Khan, T.; Shariq, M.; Chaudhry, S.A.; Das, A.K. A secure and lightweight trust evaluation model for enhancing decision-making in resource-constrained industrial WSNs. Sci. Rep. 2024, 14, 28162. [Google Scholar] [CrossRef] [PubMed]
- Peñil, P.; Díaz, A.; Posadas, H.; Medina, J.; Sánchez, P. High-Level Design of Wireless Sensor Networks for Performance Optimization Under Security Hazards. ACM Trans. Sen. Netw. 2017, 13, 1–37. [Google Scholar] [CrossRef]
- Adday, G.H.; Subramaniam, S.K.; Zukarnain, Z.A.; Samian, N. Investigating and Analyzing Simulation Tools of Wireless Sensor Networks: A Comprehensive Survey. IEEE Access 2024, 12, 22938–22977. [Google Scholar] [CrossRef]
- Ripka, P. Magnetic Sensors and Magnetometers, illustrated ed.; Artech House Remote Sensing Library, Artech House Publishers: Norwood, MA, USA, 2000; p. 516. [Google Scholar]
- Popovic, R.; Flanagan, J.; Besse, P. The future of magnetic sensors. Sens. Actuators Phys. 1996, 56, 39–55. [Google Scholar] [CrossRef]
- Vasilyuk, N.N. Calibration of integral magnetometer linear model coefficients using simultaneous measurements of a three-axis gyro. Gyroscopy Navig. 2019, 10, 99–110. [Google Scholar] [CrossRef]
- Tumański, S. Analiza możliwości zastosowania magnetometrów indukcyjnych do pomiaru indukcji słabych pól magnetycznych. Przegląd Elektrotechniczny 1986, 62, 137–141. [Google Scholar]
- Blackett, P.M.S. The magnetic field of massive rotating bodies. Nature 1947, 159, 658–666. [Google Scholar] [CrossRef] [PubMed]
- Spielvogel, A.; Whitcomb, L. A Stable Adaptive Observer for Hard-Iron and Soft-Iron Bias Calibration and Compensation for Two-Axis Magnetometers: Theory and Experimental Evaluation. IEEE Robot. Autom. Lett. 2020, 5, 1295–1302. [Google Scholar] [CrossRef]
- Cho, S.; Park, C. Tilt compensation algorithm for 2-axis magnetic compass. Electron. Lett. 2003, 39, 1589–1590. [Google Scholar] [CrossRef]
- Lapucci, T. Soft and hard iron compensation for the compasses of an operational towed hydrophone array without sensor motion by a Helmholtz coil. Sensors 2021, 21, 8104. [Google Scholar] [CrossRef]
- Lin, C.R.; Chiang, C.W.; Huang, K.Y.; Hsiao, Y.H.; Chen, P.C.; Chang, H.K.; Jang, J.P.; Chang, K.H.; Lin, F.S.; Lin, S.; et al. Evaluations of an ocean bottom electro-magnetometer and preliminary results offshore NE Taiwan. Geosci. Instrum. Methods Data Syst. 2019, 8, 265–276. [Google Scholar] [CrossRef]
- Soken, H.; Sakai, S.I. Magnetometer Calibration for Advanced Small Satellite Missions. In Proceedings of the Conference Paper–30th International Symposium on Space Technology and Science, Kobe, Japan, 3–10 July 2015; Volume 7. [Google Scholar]



| Axis | Pre-Cal. Offset | Post-Cal. Offset | Pre-Cal. Noise | Post-Cal. Noise |
|---|---|---|---|---|
| X | −55 | 0 | ±3 | ±0.5 |
| Y | −60 | 0 | ±4 | ±0.7 |
| Z | −50 | 0 | ±2.5 | ±0.4 |
| Tilt Angle (°) | Raw Heading Error (°) | Compensated Error (°) |
|---|---|---|
| 0 | 2.5 | 0.3 |
| 10 | 7.2 | 1.0 |
| 20 | 15.4 | 2.5 |
| 30 | 24.1 | 4.8 |
| Applied Field (T) | Measured Field (T) | Error (T) | Detection Range (m) |
|---|---|---|---|
| 50 | 49.5 | 0.5 | 2.0 |
| 100 | 99.1 | 0.9 | 3.5 |
| 150 | 148.2 | 1.8 | 5.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adamczyk, A.; Klebba, M.; Wąż, M.; Pavić, I. Underwater Magnetic Sensors Network. Sensors 2025, 25, 2493. https://doi.org/10.3390/s25082493
Adamczyk A, Klebba M, Wąż M, Pavić I. Underwater Magnetic Sensors Network. Sensors. 2025; 25(8):2493. https://doi.org/10.3390/s25082493
Chicago/Turabian StyleAdamczyk, Arkadiusz, Maciej Klebba, Mariusz Wąż, and Ivan Pavić. 2025. "Underwater Magnetic Sensors Network" Sensors 25, no. 8: 2493. https://doi.org/10.3390/s25082493
APA StyleAdamczyk, A., Klebba, M., Wąż, M., & Pavić, I. (2025). Underwater Magnetic Sensors Network. Sensors, 25(8), 2493. https://doi.org/10.3390/s25082493