1. Introduction
Data transmission plays a crucial role in marine networks. Efficient and real-time data transmission enables the precise monitoring and management of the marine environment, resources, and facilities, supporting marine disaster warning, ecological protection, and sustainable resource development [
1]. Data collection devices, such as sensors, buoys, and unmanned submersibles, continuously gather key data on marine temperature, salinity, water quality, meteorological conditions, and more. The transmission system ensures that this information is delivered in a timely and accurate manner to shore-based or cloud platforms for analysis and processing [
2]. Stable data transmission technologies effectively support intelligent applications such as autonomous navigation and underwater robotics [
3], enhancing the efficiency of marine management and emergency response.
Data transmission in the marine environment faces numerous technical challenges. Underwater communication is heavily affected by seawater absorption and scattering, resulting in significant signal attenuation, especially in deep-water areas where the communication range and data transfer rates are limited. Bandwidth constraints make large-scale data transmission and real-time monitoring difficult, while noise interference in the marine environment further degrades signal quality [
4]. The energy consumption of devices is another major issue, particularly for unmanned underwater devices, where the limited energy restricts the operational time. Additionally, transmission delays impact real-time applications such as disaster warning and environmental monitoring. Although technologies like acoustic communication have been applied, the complexity of the marine environment makes overcoming issues such as signal attenuation and bandwidth limitations a pressing challenge. Many scholars are actively researching this issue, but an ideal solution has yet to be found.
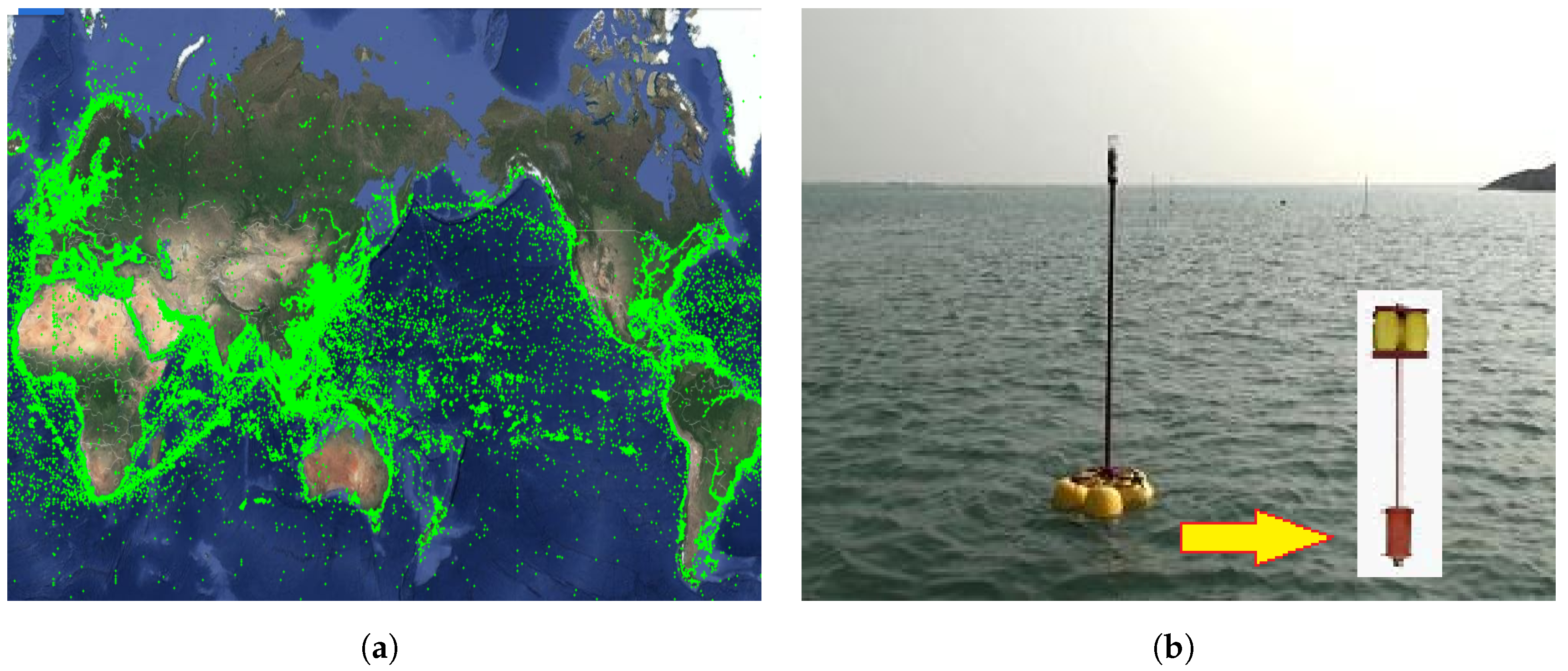
In recent years, the development of marine Internet of Things (IoT) technology has been rapid, especially in utilizing surface vessels to form a vessel network for data transmission (as shown in
Figure 1a), making it possible to leverage surface vessel resources to improve underwater communication performance. Compared to underwater networks, vessel networks offer several advantages, including faster transmission speeds, longer transmission distances, lower bit error rates, more stable links, lower energy consumption, easier deployment and maintenance, and a wider variety of devices. Against this backdrop, this paper proposes a Hybrid Dual-Link Transmission Algorithm (HDTA) based on the Internet of Vessels, aimed at improving underwater communication performance by utilizing vessel resources.
Figure 1b shows the sensor nodes used in this study. These nodes were independently developed by the Sensor Network Laboratory in collaboration with our team and deployed on the OceanSense marine sensor network test platform in Qingdao Bay. These sensor nodes have bidirectional communication capabilities between above-water and underwater environments, allowing for effective data transmission across both, which we refer to as “dual-head nodes”. The OceanSense platform provides a real-world experimental environment for this study, used to validate the communication and data transmission capabilities of marine sensor nodes in complex oceanic conditions. In this study, we deploy bidirectional sensor nodes on vessels to verify their feasibility and performance in underwater and surface communications. These vessels can not only communicate with underwater sensor nodes but also exchange information with other vessels, thus establishing a dual-link communication model between the surface and underwater.
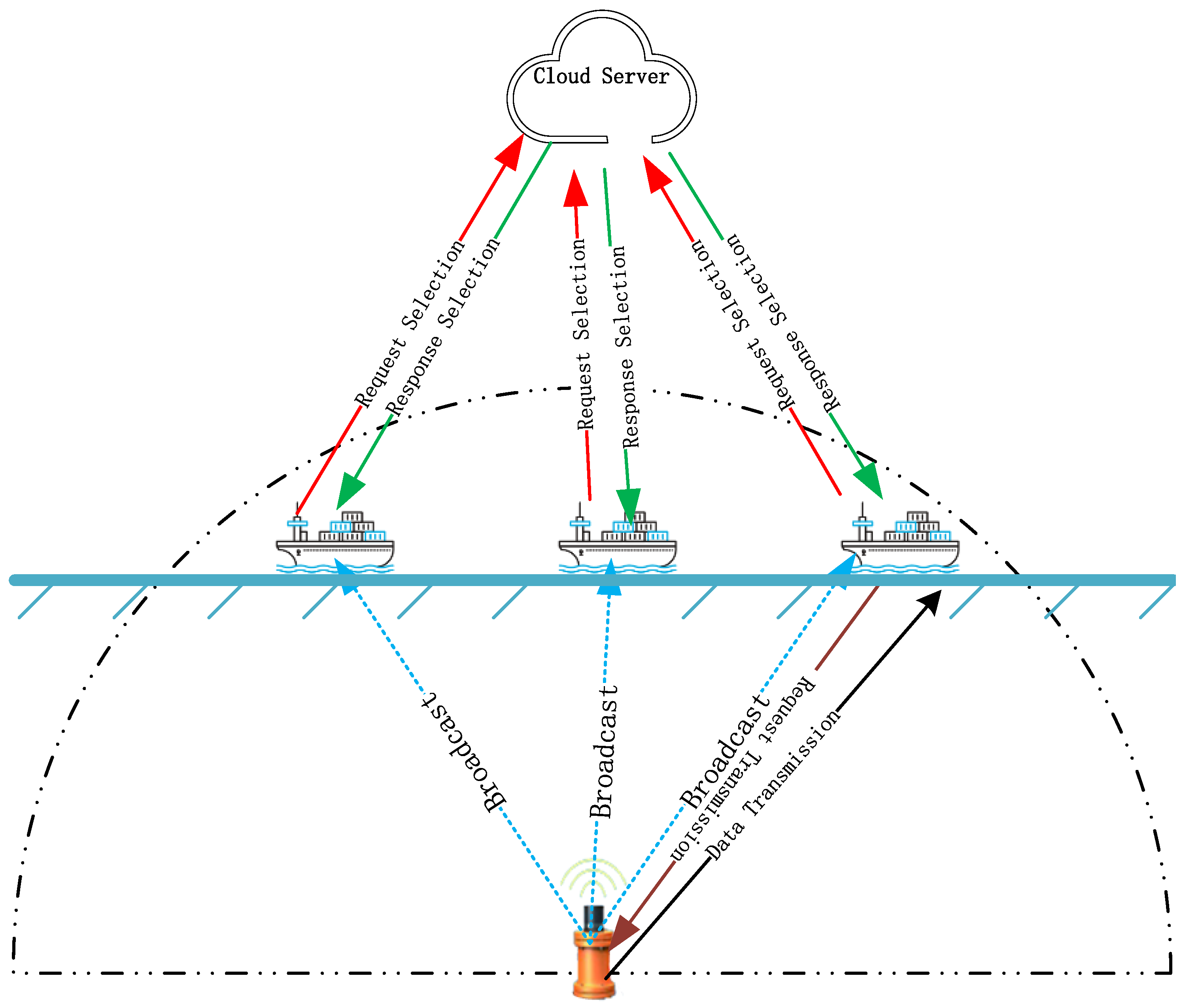
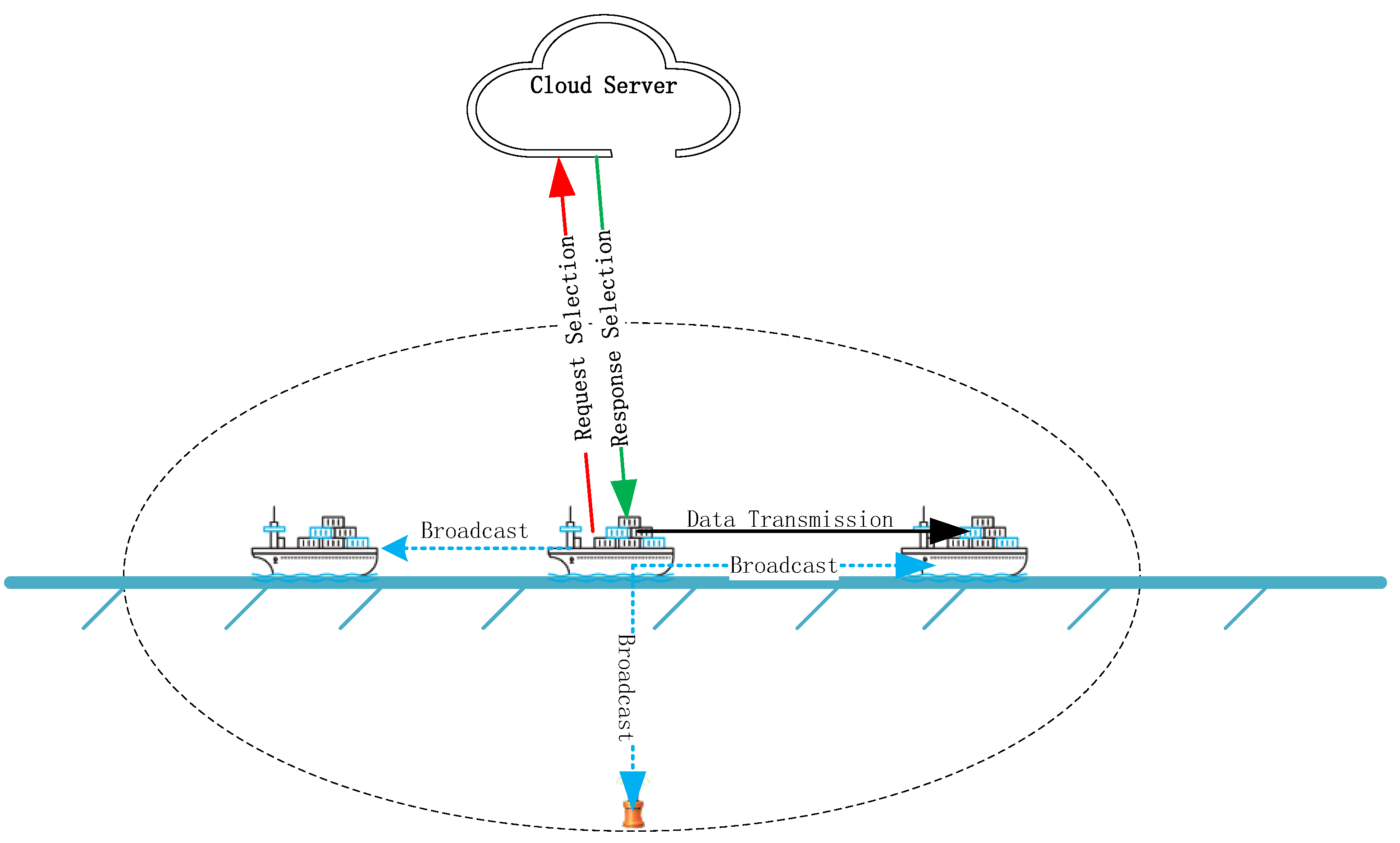
Specifically, the dual-link data transmission based on the vessel network faces two main challenges: first, how to select suitable vessels as relay nodes, and second, how to determine the data transmission path. To address these issues, this paper designs the HDTA algorithm transmission model and proposes a spatial crowdsourcing task allocation algorithm based on Bayesian reputation. By treating underwater nodes as task publishers and vessels as task executors, vessels participating in data transmission are selected through spatial crowdsourcing. The algorithm combines a comprehensive scoring function and a solution to the cold start problem to ensure the stability and efficiency of the data link.
The subsequent sections of this paper are organized as follows.
In
Section 2, a review of the existing literature related to this study is provided, focusing on the main research progress and methods in the field. The strengths and weaknesses of various research methods are compared and analyzed. In
Section 3, the research methodology is described, and a crowdsourcing allocation algorithm based on Bayesian reputation for selecting high-quality vessels is proposed. This section also addresses relay vessel selection and transmission path selection issues, combining a comprehensive scoring function and solutions to the cold start problem. Incentive schemes are introduced to ensure the stability of data transmission and encourage more vessels to participate. In
Section 4, the research results are presented in detail through relevant experiments, followed by an in-depth discussion. These results are compared with the existing literature to demonstrate the feasibility and advantages of the proposed solution. Finally, in
Section 5, a comprehensive summary of the research is provided, along with suggestions for future research directions.
2. Related Work
To improve the reliability of data collection in underwater environments, recent years have seen significant research into the use of Underwater Sensor Networks (UWSNs) for underwater data transmission. The findings in this area are highly relevant to this paper. Underwater Sensor Networks are an essential component of marine networks, wherein sensor nodes are deployed underwater, and communication links are established to enable the real-time monitoring, data collection, and information transmission of the marine environment [
5,
6]. However, unlike electromagnetic wave transmission on land, acoustic waves in water propagate more slowly and are influenced by phenomena such as multipath propagation, reflection, and diffraction. The path loss in underwater transmission is substantial, with severe signal attenuation and limited transmission distance [
7]. Therefore, designing an effective mechanism that allows UWSNs to achieve long-distance, large-volume data collection and transmission under acoustic transmission conditions poses a significant challenge. Given the inherent limitations of UWSNs, current research methods in the literature can be categorized into two approaches: one is using multi-hop routing for data transmission, and the other is deploying flexible Autonomous Underwater Vehicles (AUVs) and Unmanned Underwater Vehicles (UUVs) to assist with data collection and transmission. In AUV-assisted transmission schemes, network models are generally divided into three categories [
8]: (I) Distributed Networks [
9,
10,
11]: nodes are independently distributed, and AUVs need to access each node, although this is less efficient. (II) Node grouping based on fixed AUV paths [
12,
13]: limited by the fixed AUV path and network architecture, the primary goal is to avoid conflicts between nodes and increase network throughput, but the fixed AUV path restricts the network’s flexibility. (III) AUV-assisted clustering networks [
14]: network nodes are divided into clusters, and AUVs only collect data from cluster heads, significantly reducing the AUV travel time. By properly selecting cluster heads and carefully designing clustering algorithms, network performance can be significantly improved.
In multi-hop transmission methods, most UWSN data transmission approaches focus on energy consumption. Existing energy-efficient routing algorithms for UWSNs can be classified into three categories: depth-based routing algorithms [
15,
16], clustering-based routing algorithms [
17,
18,
19], and cooperative reliability-based routing algorithms [
20,
21]. These algorithms aim to reduce energy consumption and delay node failure times. However, due to issues like network voids and the limitations of the algorithms themselves, even with sufficient live nodes in the UWSN, the network may still fail prematurely if an important node encounters problems and data cannot be transmitted effectively. To address the energy consumption of aggregation nodes in long-distance data transmission, methods using drone-assisted aggregation nodes for data transmission have been proposed [
22]. Drone data collection offers higher flexibility, with lower deployment and transmission latency, and higher bandwidth, among other advantages, but requires reliable drone deployment or path planning algorithms [
23]. To achieve collaborative communication and resource sharing in storage, a maritime data transmission scheme assisted by unmanned surface vehicles (USVs) has been proposed [
24]. We summarize the comparison of the advantages and disadvantages of HDTA and other related references in certain aspects in
Table 1.The checkmark indicates that the specific study in the reference demonstrates significant advantages in certain aspects compared to other studies.
However, most of the aforementioned studies still face significant challenges posed by the inherent limitations of underwater communications, such as severe path loss, limited transmission range, high signal attenuation, and problems related to multipath propagation and environmental interference. The number of vessels in the ocean has reached a certain scale. As relay nodes, vessels offer a larger communication coverage, stable energy supply, and high bandwidth support compared to AUVs, USVs, and buoys, making them suitable for long-distance, high-speed data transmission. Their strong maneuverability and flexibility enable them to adapt to dynamic environments, whereas AUVs and USVs are limited by underwater or surface constraints, and buoys are restricted by energy supply and fixed positions, resulting in a smaller communication range. Therefore, this research proposes using passing vessels as relay nodes in the multi-hop transmission method, employing a spatial crowdsourcing allocation algorithm to ensure the stability and rate of data transmission links. The concept of crowdsourcing was first introduced by Jeff Howe and Mark Robinson in 2006 [
28]. With the development of mobile internet and the sharing economy, traditional crowdsourcing has shifted towards spatial crowdsourcing [
29]. Task allocation is considered the most crucial issue in spatial crowdsourcing [
30], and spatial crowdsourcing task allocation algorithms have been applied in various fields. Task allocation can be classified into two dimensions based on the arrival scenario: static matching and dynamic matching. Static matching involves the one-time matching of known task and worker information, whereas dynamic matching deals with real-time changing tasks and worker information, requiring real-time scheduling and response. Wu et al. [
31] proposed a time-prediction-based task allocation framework based on historical data, and introduced a heuristic algorithm for the one-time assignment of spatial crowdsourcing tasks to appropriate workers. Dynamic matching addresses real-time variations, with algorithms designed for real-time adjustment. Yao et al. [
32] addressed the problem of online non-rejection-aware task allocation in spatial crowdsourcing, and proposed a non-rejection threshold-based random algorithm (ONRTA-RT) to solve the issue. Zhao et al. [
33] improved the allocation utility using reinforcement learning for dynamic online allocation.
Task allocation can also be categorized based on objectives, such as maximizing the number of tasks, minimizing total cost, or achieving stable matching and fair allocation. Zhao et al. [
34] first employed Voronoi diagrams and adaptive weighted Voronoi algorithms for geographic partitioning, followed by reinforcement learning to maximize the total number of allocated tasks while minimizing the average task allocation differences. Zhao et al. [
35] considered fairness in task allocation from the worker’s perspective and solved the Fair and Effective Task Allocation (FETA) problem. Huang et al. [
36] proposed a combined solution with two suggested matching techniques to improve the overall matching utility and reduce the blocking ratio, considering worker preferences. Ma et al. [
37] studied the multi-objective spatiotemporal task allocation (MOST) problem in spatial crowdsourcing, modeling it as a combinatorial multi-objective optimization (MOO) problem to maximize overall task completion rates and minimize average task time costs. Md Mujibur Rahman et al. [
38] addressed the stable matching problem by using reputation to measure workers’ reliability, employing multi-criteria trust and reputation factors derived from a Mamdani fuzzy inference system to allocate each spatial task. In this study, we propose a Bayesian reputation-based spatial crowdsourcing allocation algorithm, which effectively assigns task information to the most suitable vessels, selecting the best vessels as relay nodes to ensure link stability.
4. Simulation Experiments
In this section of experiments, this study utilizes real ship data to evaluate the performance of the algorithm. The experimental platform is configured with Intel(R) Core(TM) i7-8750H CPU @ 2.1 GHz, 16.0 GB of RAM, and 64-bit Windows 11 as the operating system. The programming language is Python 3.10.7, and the development tool is PyCharm 3.10.7, while tools such as Matlab R2022b are used for data plotting and analysis.
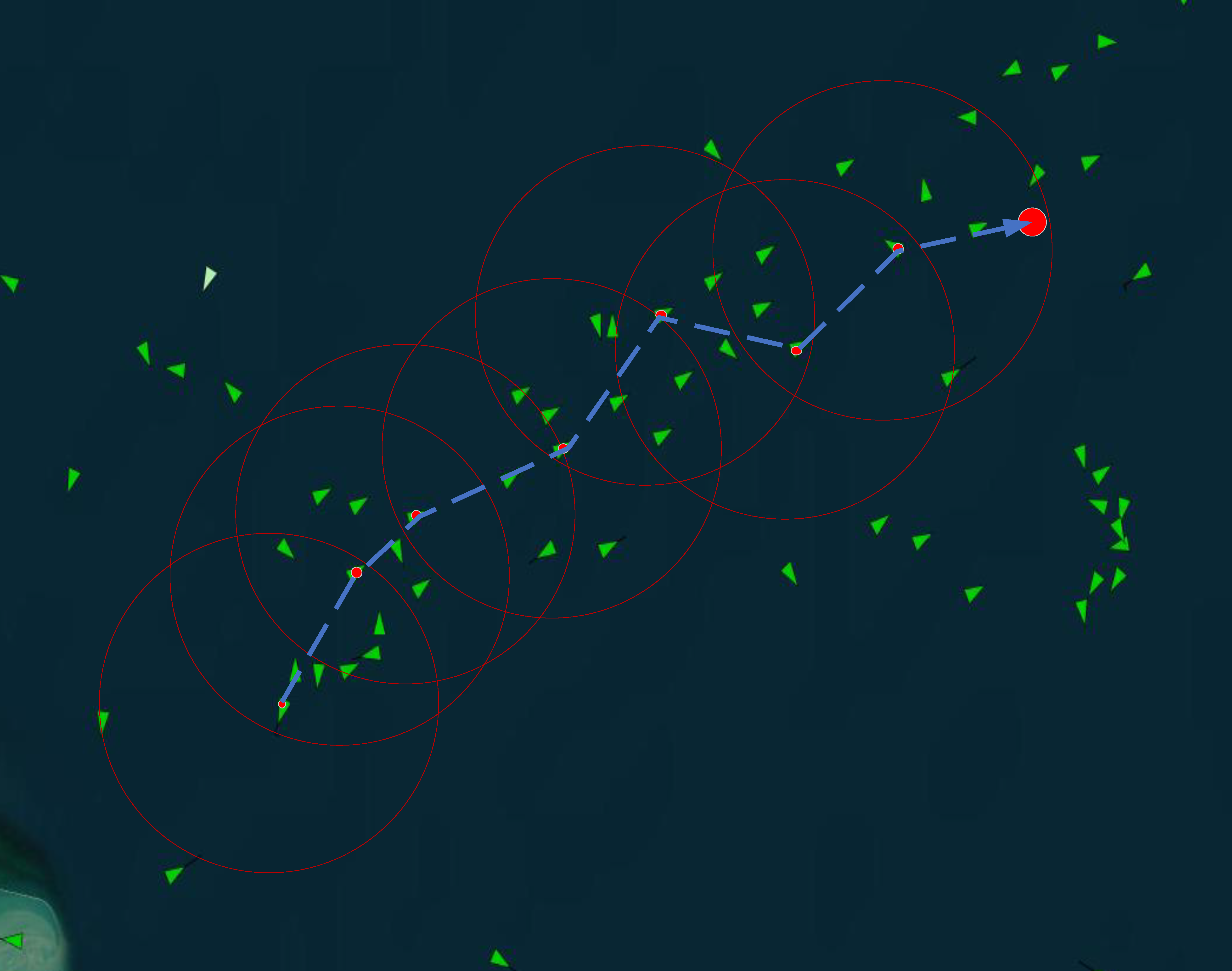
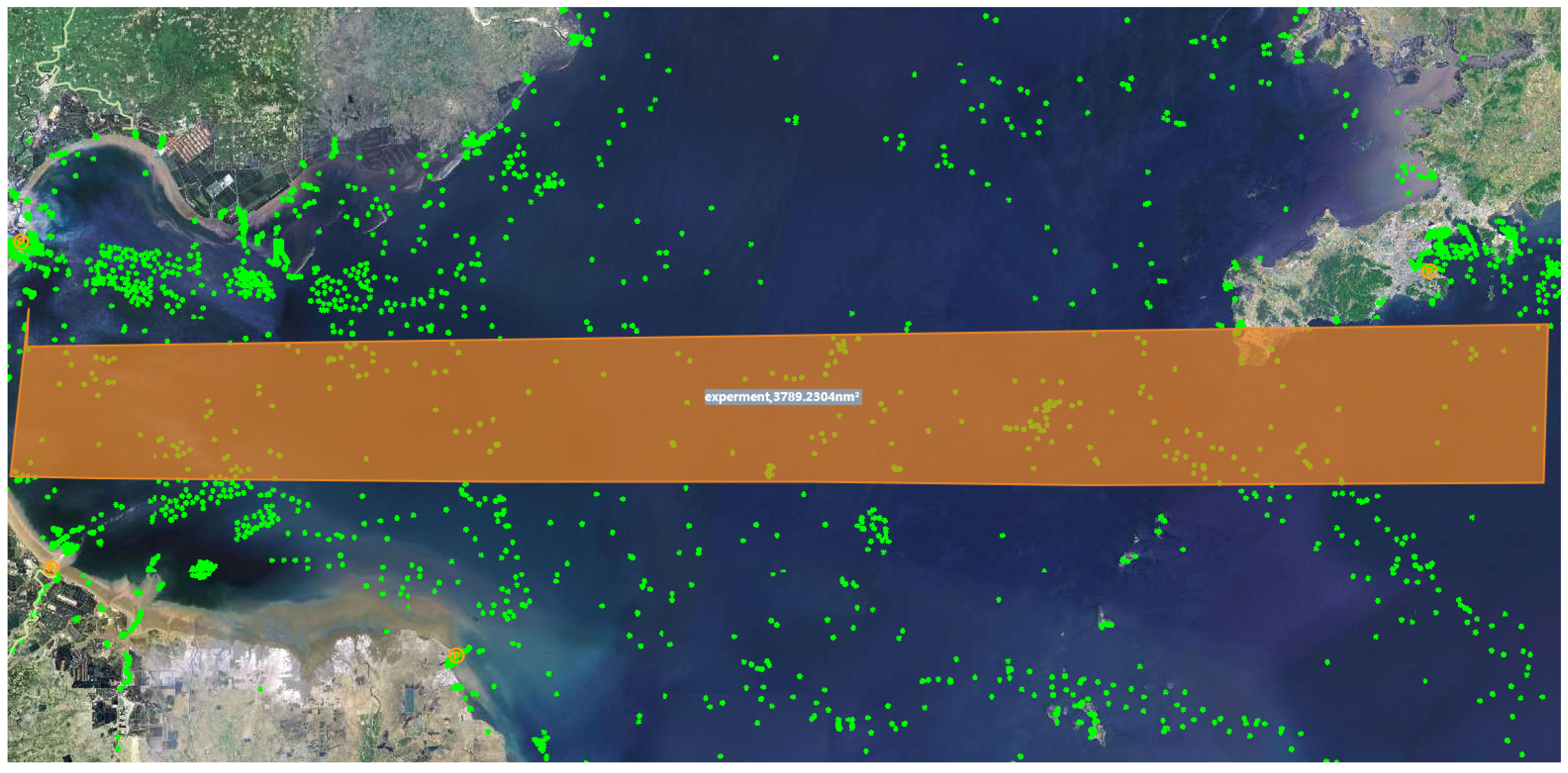
In this study, real-time ship data provided by ShipShun (
http://www.ships66.com) are used. Specifically, an area within the range of east longitude 38.461963 to 38.810483 and north latitude 119.066613 to 121.986084 at a certain moment on 8 January 2025 (shown in
Figure 7) is selected, and the green points represent the real-time coordinate points of the ships. In this area, 738 ships are selected as real data for the experiment, with the assumption that each ship is equipped with a dual-head node, where each dual-head node is equipped with both above-water and underwater communication modules. In addition, the positions of 100 underwater sensor nodes are randomly generated within the range of east longitude 38.461963 to 38.810483, north latitude 119.066613 to 121.986084, and depth 0 to 300 m. The three-dimensional spatial distribution and transmission paths of the sensor nodes relative to the ship’s position are shown in
Figure 8.
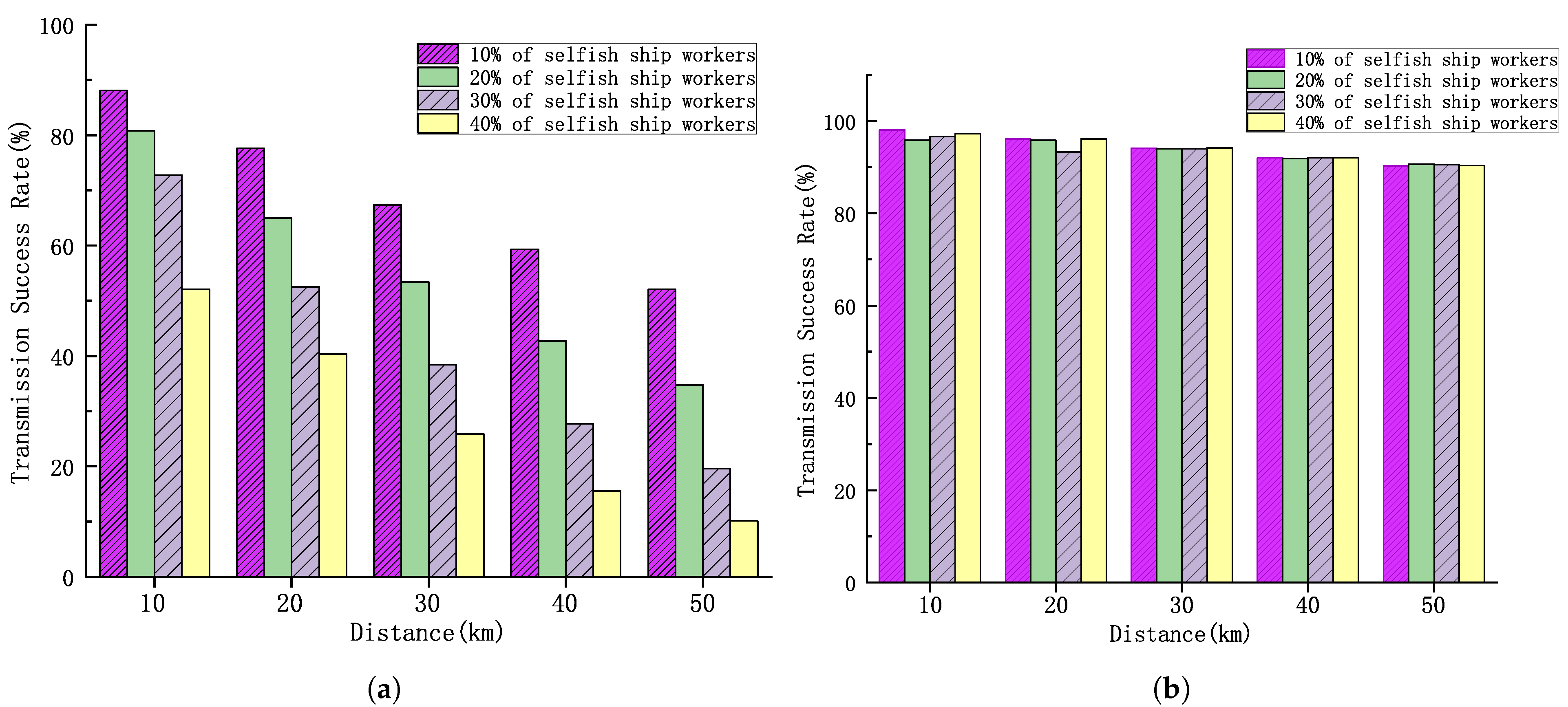
In order to simulate the real situation of real ship workers, ship workers are divided into two types: type a and type b. Type a ship workers have a high degree of trustworthiness, and their probability of successfully completing the task is set to be 98% in the experiment, which means that there is only a 2% probability of not being able to complete the task properly. Type b ship workers, on the other hand, belong to the selfish type, and their probability of not being able to complete the task is set to 90% in the experiment, and there is only a 10% probability of being able to complete the task. After sub-simulating the HDTA algorithm for 1000 times, it is found that an initial reputation value could be attached to each ship.
As shown in
Figure 9a, different percentages of selfish ship workers of 10%, 20%, 30% and 40% are set, and the success rate of task completion at different distances is analyzed. The results indicate that, within the same time frame, the task transmission success rate for the experimental group with a higher proportion of selfish ship workers is significantly lower than that for the experimental group with a lower proportion. Additionally, as the transmission distance increases, the task transmission success rates for experimental groups with different proportions of selfish ship workers all show a marked decline. This is because, as the transmission distance increases, the number of relay nodes encountered also increases, which in turn raises the likelihood of encountering selfish ship workers along the transmission path, ultimately leading to a decrease in the overall task transmission success rate.
Figure 9b illustrates the experimental results after the introduction of reputation selection. The changes in task completion rates at different distances are analyzed for 10%, 20%, 30%, and 40% selfish ship worker proportions. The comparison reveals that the task success rate stays at a high level for both increasing distance and increasing proportion of selfish ship workers. This is because the algorithm can efficiently filter out selfish ship workers and select the optimal ship workers to execute the crowdsourcing tasks.
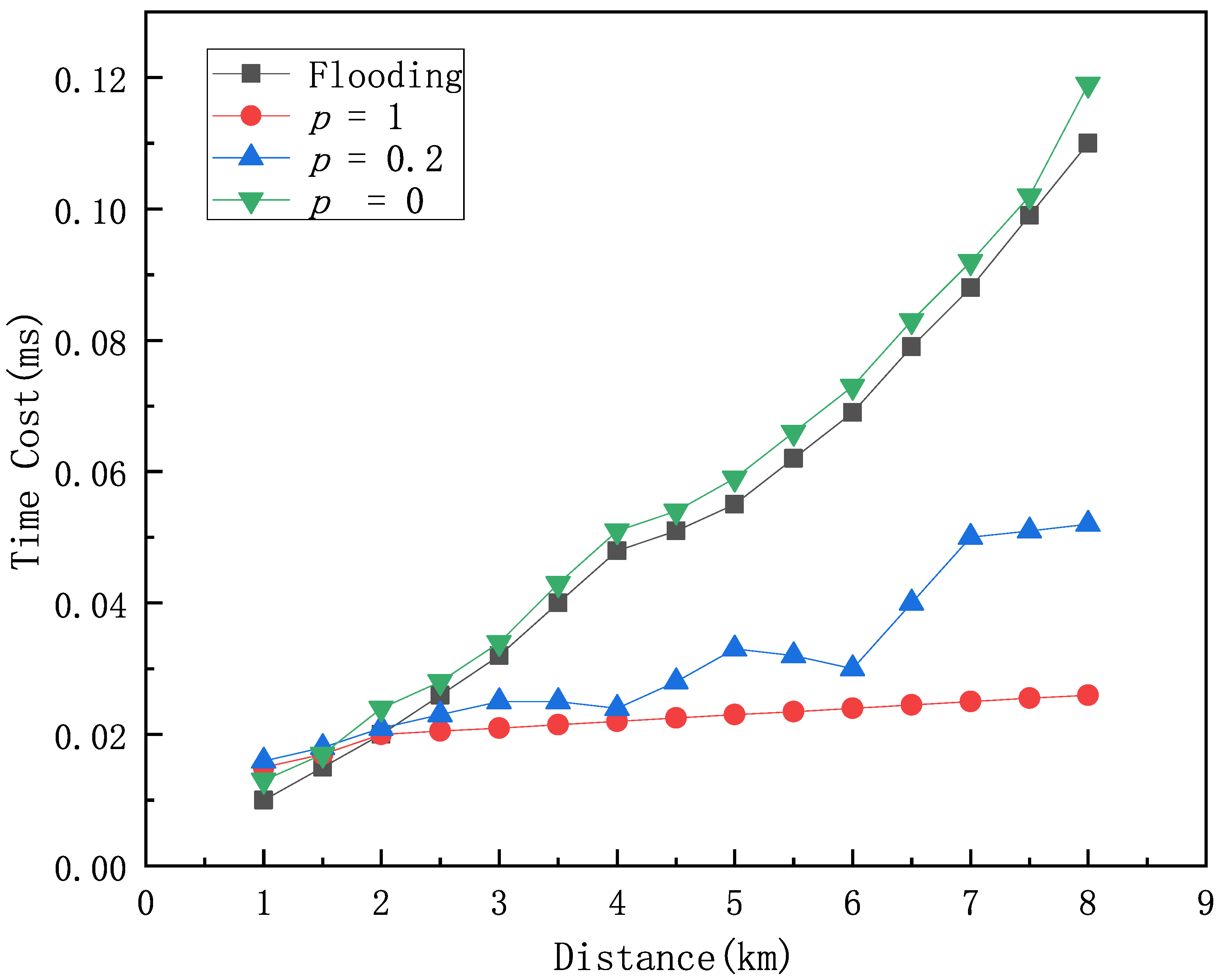
In order to investigate the impact of vessel density on data transmission speed, transmission reliability, and overall system performance, we simulate various vessel density scenarios. We analyze the effect of vessel density on the time overhead of the HDTA algorithm under conditions of the same maritime area, the same underwater node density, and the same proportion of selfish vessel nodes, and compare the results with those of the Flooding algorithm. The Flooding algorithm is a widely used network data transmission method that broadcasts data at each node in the absence of explicit routing information. Vessel density
p represents the amount of vessels per square kilometer. We examine the time overhead for different vessel densities
p = 1,
p = 2,
p = 3, and compare it with that of the Flooding algorithm as shown in
Figure 10. The analysis shows that the ship density has a significant impact on the performance of the HDTA algorithm. When
p = 0, it indicates that there are no ships in the surrounding area, and the HDTA algorithm relies entirely on the underwater network and underwater sensor nodes for multi-hop transmission. In this case, the algorithm performs at its lowest, with the highest time overhead. When
p = 0.2, it represents a low-density ship area. The performance of the HDTA algorithm becomes unstable, as there may be no suitable ships available as relay nodes, and data can only be transmitted to nearby underwater sensor nodes or wait for a suitable ship. When the ship density reaches or exceeds
p = 1, it is considered a high-density ship area, and the HDTA algorithm performs at its best.
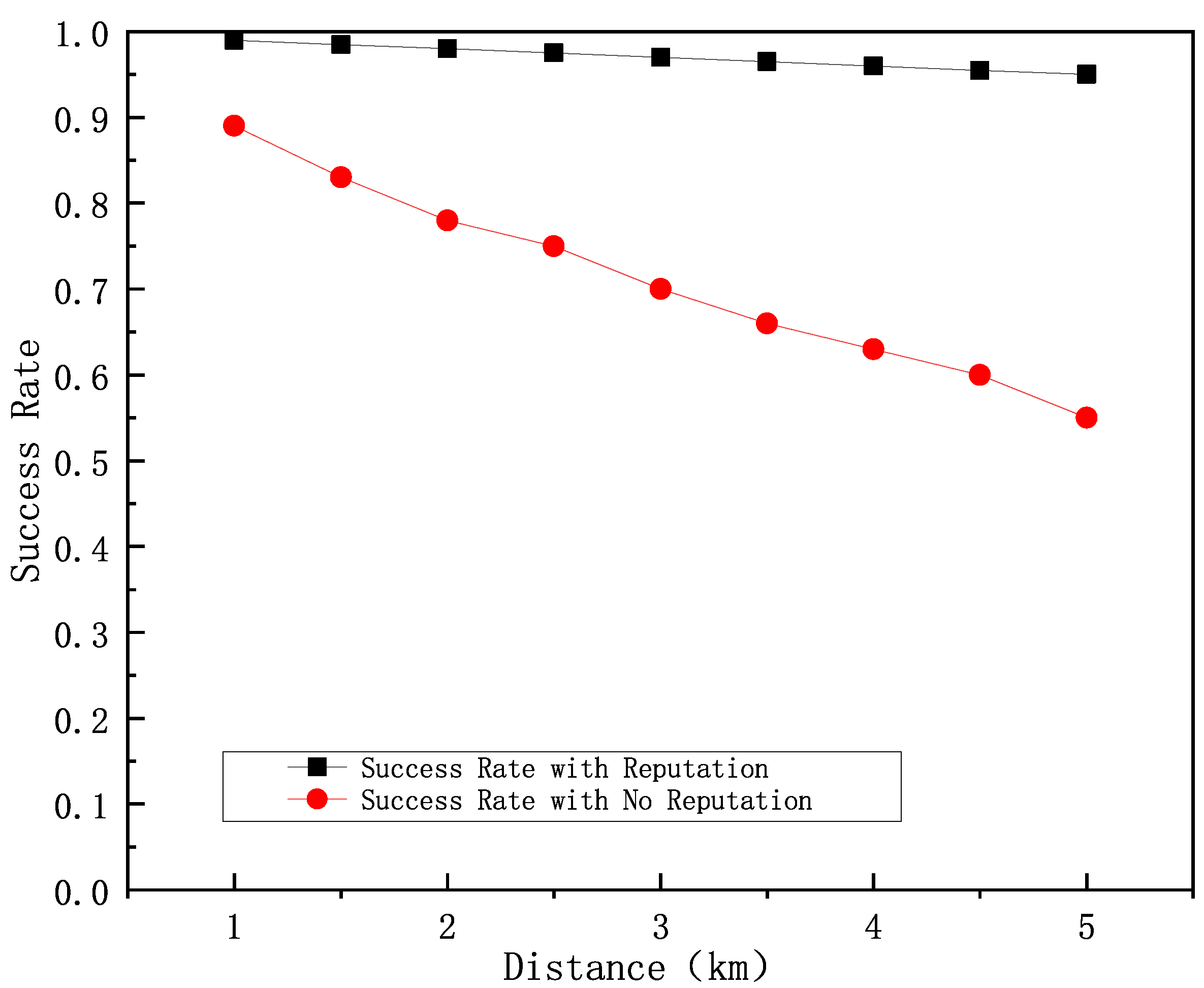
Figure 11 shows a comparison of the task transmission success rate of the algorithm with the addition of the reputation selection algorithm versus the algorithm without the addition of the reputation selection algorithm at different distances with 10% selfish ship workers. The results show that the task transmission success rate of the algorithm without adding reputation matching algorithm keeps decreasing as the distance increases, while the HDTA algorithm with the addition of the reputation selection algorithm always maintains a high and stable task transmission success rate.
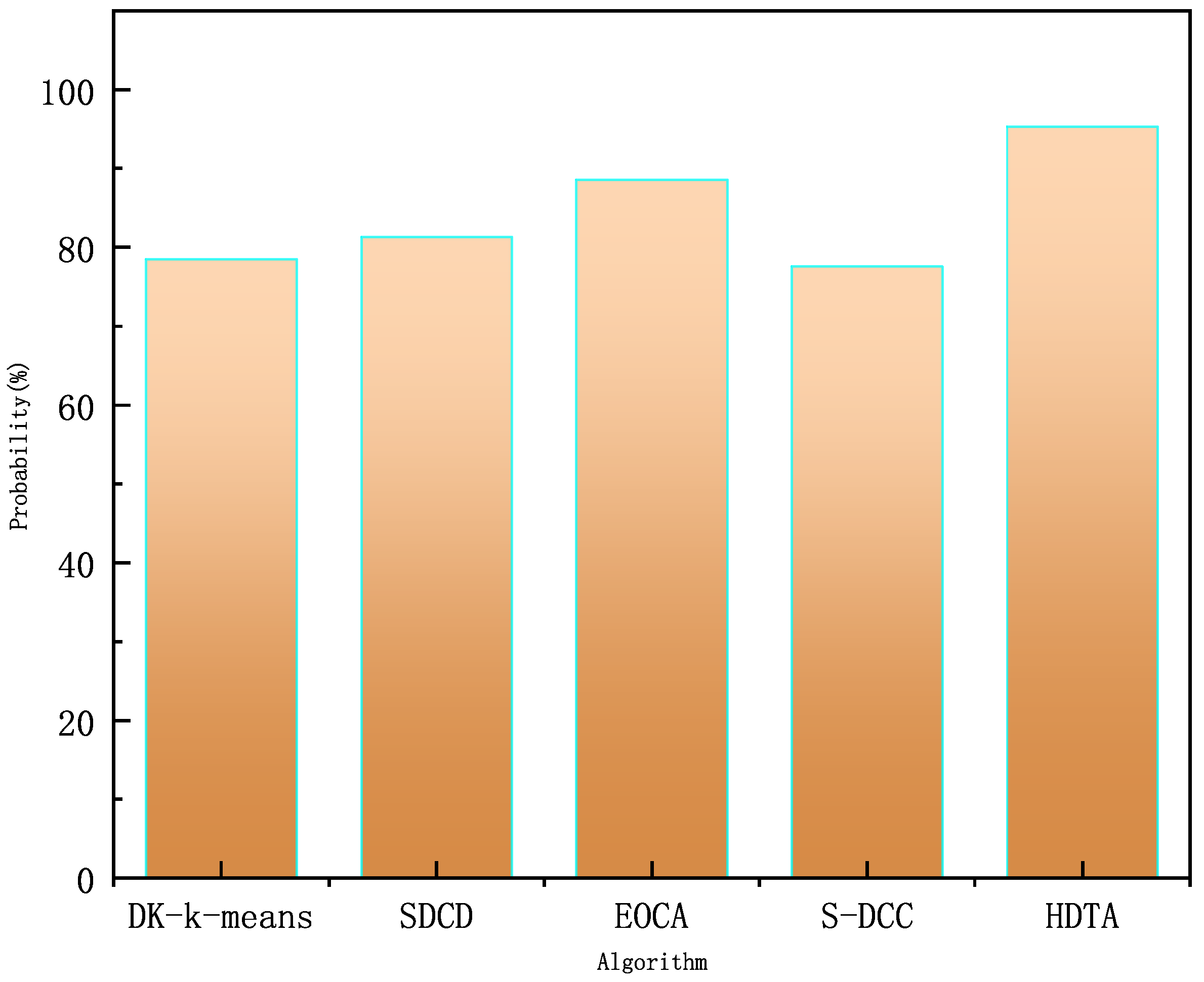
Figure 12 illustrates the results of different algorithms in terms of packet transmission success rate. We compare advanced algorithms such as DC-K-means [
25] for clustering algorithms to optimize multi-hop data transmission in underwater acoustic sensor networks, data collection based on a hierarchical approach for optimizing data transmission and energy management in underwater acoustic sensor networks. SDCS [
26], energy-optimized clustering (EOCA) for multi-hop underwater acoustic cooperative sensor networks [
39], selective dynamic coded cooperative communication (S-DCC) for multi-hop underwater acoustic sensor network [
27], and other advanced algorithms, respectively, are subjected to 1000 simulations, and the probabilities of each algorithm successfully completing the packet transmission are 78.5%, 81.3%, 88.6%, and 77.6%, respectively, whereas the HDTA algorithm achieves a success rate of 95.3%. Based on the 95% confidence interval analysis, the success rates of the other algorithms are [77.1%, 79.9%], [80.0%, 82.6%], [87.4%, 89.8%], and [76.2%, 79.0%], while the success rate confidence interval for the HDTA algorithm is [94.5%, 96.1%].
Traditional multi-hop data transmission has a relatively low success rate due to factors such as channel quality, propagation conditions (e.g., signal attenuation and multipath effects), node energy, and state. In contrast, the HDTA algorithm leverages vessels as multi-hop relay nodes, which significantly improves performance. As the underwater part of the transmission is shifted to above-water, where vessel energy consumption is negligible, HDTA avoids many of the inevitable drawbacks of traditional multi-hop algorithms. Furthermore, the HDTA algorithm filters out selfish vessels and focuses on the recent behavior of vessel nodes. When a vessel’s behavior deviates from normal, its reputation is rapidly reduced, ensuring stable link transmission. These results indicate that the HDTA algorithm proposed in this paper outperforms other advanced algorithms in terms of packet delivery rate.
In underwater sensor networks, algorithms with low time complexity can reduce computational and energy consumption, improve real-time performance and stability, lower the communication overhead, and optimize overall performance. Especially in large-scale and dynamic environments, they ensure efficient operation, extend network lifespan, and enhance system reliability. In
Table 2, we summarize and compare the complexity of crowdsourcing allocation algorithms from other references, and the results show that the HDTA algorithm has a clear advantage in terms of complexity.
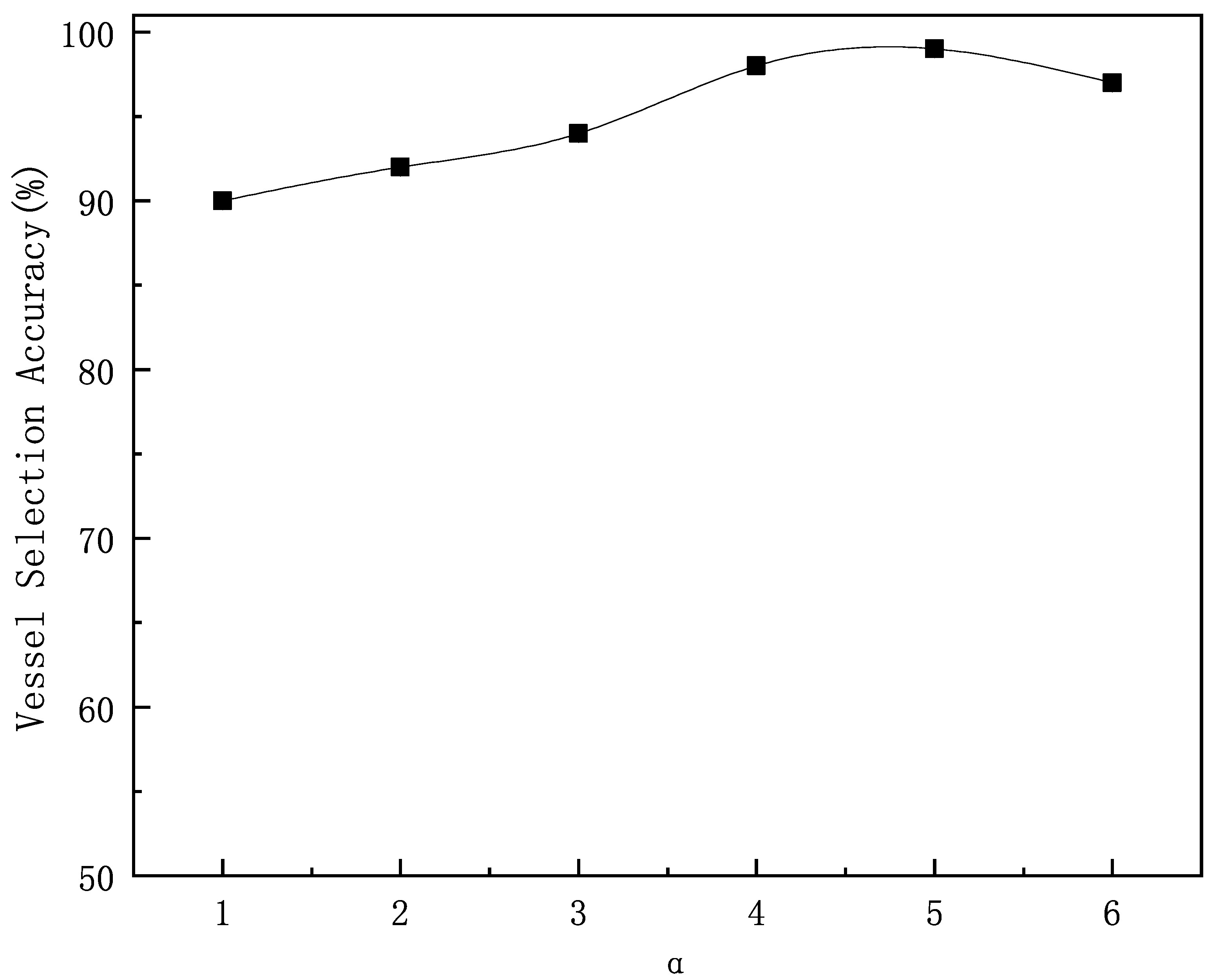
As shown in
Figure 13, the experiment analyzes the effect of the
time decay factor on the correctness of relay vessel selection. The experiment simulates 1000 selections of relay vessels under different
values. As
increases, the weight of more distant historical time slices decays faster, making the recent behavior have a greater impact on the vessel’s reputation value. This allows for a more accurate reflection of the vessel’s true reputation. When
= 4.5, the probability of selecting the correct vessel reaches its highest, with the algorithm’s success rate at 99.1%. Based on the 95% confidence interval analysis, the confidence interval for the algorithm’s success rate is [0.9851, 0.9969].
Figure 14 compares the time overhead of the HDTA algorithm with the IAEF algorithm [
44] and SDCS [
26] under the same packet size, transmission protocol, and transmission distance conditions. In the underwater part, the time overhead differences between the three algorithms are relatively small. When the target node is closer, the transmission path of the HDTA algorithm is mostly underwater, and the path length is slightly longer than that of the traditional multi-hop algorithm, resulting in a slightly higher time overhead. As the propagation medium and transmission bandwidth change, the propagation speed shows significant differences. With increasing the transmission distance, the time overhead of IAEF and SDCS increases significantly, while the HDTA algorithm, by selecting vessels as relay nodes and using Very High Frequency (VHF) radio for vessel-to-vessel communication, significantly increases the transmission rate, thus greatly reducing the time overhead.
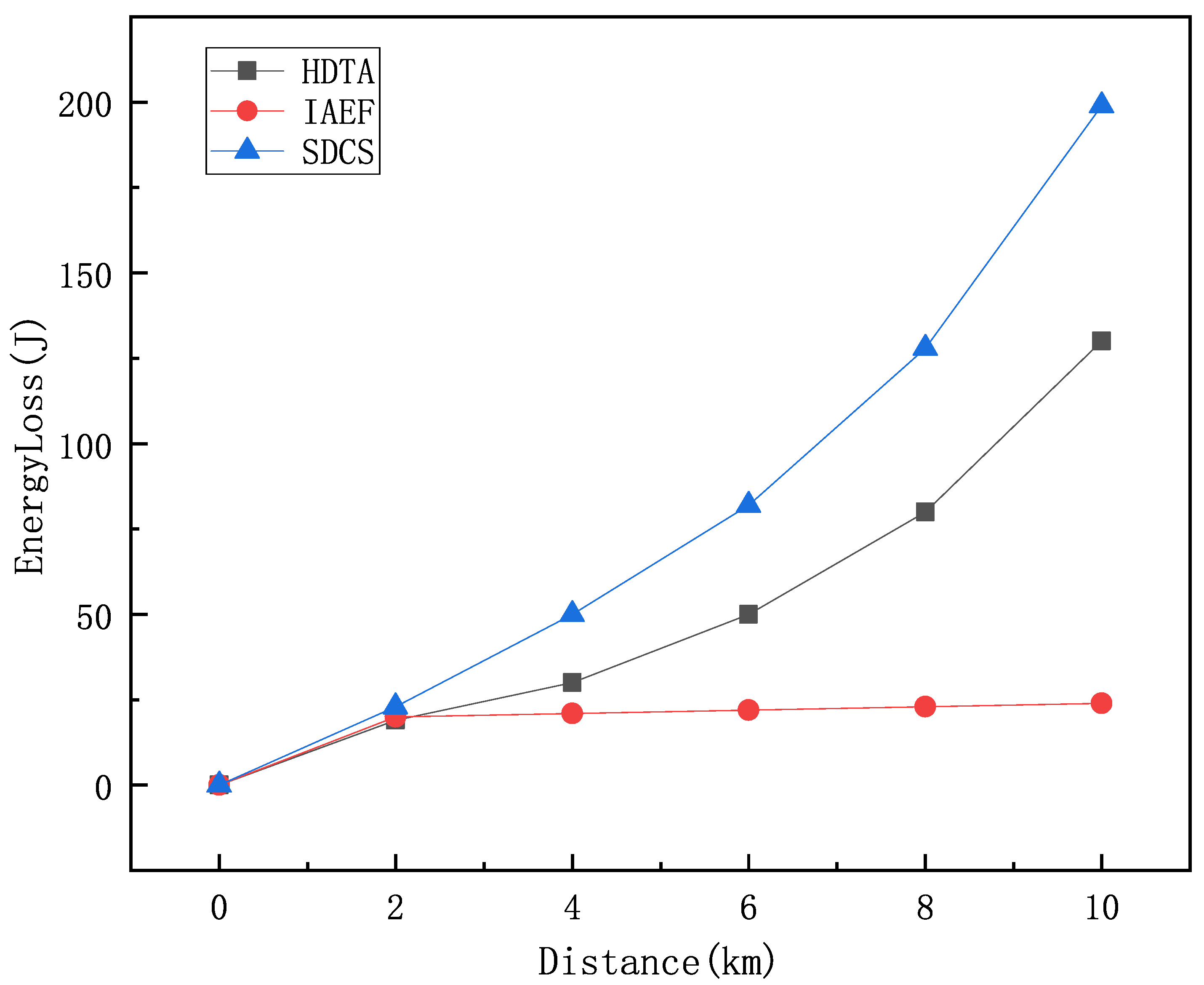
Figure 15 compares the energy consumption of the HDTA algorithm with the IAEF and SDCS algorithms at different transmission distances. It can be seen that as the transmission distance increases, the energy consumption of the HDTA algorithm is significantly lower than that of IAEF and SDCS. This is because in the HDTA algorithm, the energy consumption of the vessels selected as relay nodes is negligible, while in traditional multi-hop algorithms, the energy consumption increases with distance. The HDTA algorithm reduces unnecessary energy consumption and increases the survival time of underwater nodes.
Dual-head nodes are relatively inexpensive to design and manufacture and are suitable for large-scale deployment on a wide range of vessels, including cruise ships, cargo ships, and fishing boats. Compared to the deployment of Unmanned Aerial Vehicle (UAV), Automated Underwater Vehicle (AUV), or Unmanned Surface Vehicle (USV) assisted data transmission solutions, dual-head nodes offer significant advantages in terms of cost and deployment efficiency. Additionally, dual-head nodes are relatively simple to maintain and upgrade, reducing the complexity and cost of long-term operations. By integrating with Automatic Identification Systems (AISs), dual-head nodes enable real-time transmission and sharing of vessel position and status information, thereby improving the efficiency and safety of maritime communications. Despite the technical feasibility and superiority of the HDTA algorithm, encouraging more ships to actively participate in crowdsourcing tasks remains a challenge in practical applications. Increasing vessel acceptance of HDTA and ensuring data privacy and security are key to promoting the technology.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}