1. Introduction
Gait recognition [
1,
2], a biometric identification method that leverages unique walking patterns, has attracted considerable attention in recent years within the field of biometrics. Compared with other biometric modalities [
3,
4], gait recognition stands out for its ability to be captured effortlessly from a distance without physical contact, making it particularly advantageous for applications in surveillance and security prevention, which makes it particularly suitable for applications in the fields of surveillance and security prevention. Gait recognition is characterized by non-intrusiveness and is particularly suitable for complex non-cooperative environments. Therefore, it has in depth research in scenarios such as public safety, identity verification, and criminal investigation [
5]. With the advancement of deep learning, researchers have started leveraging deep learning methods to address these challenges [
6,
7,
8,
9,
10,
11,
12,
13,
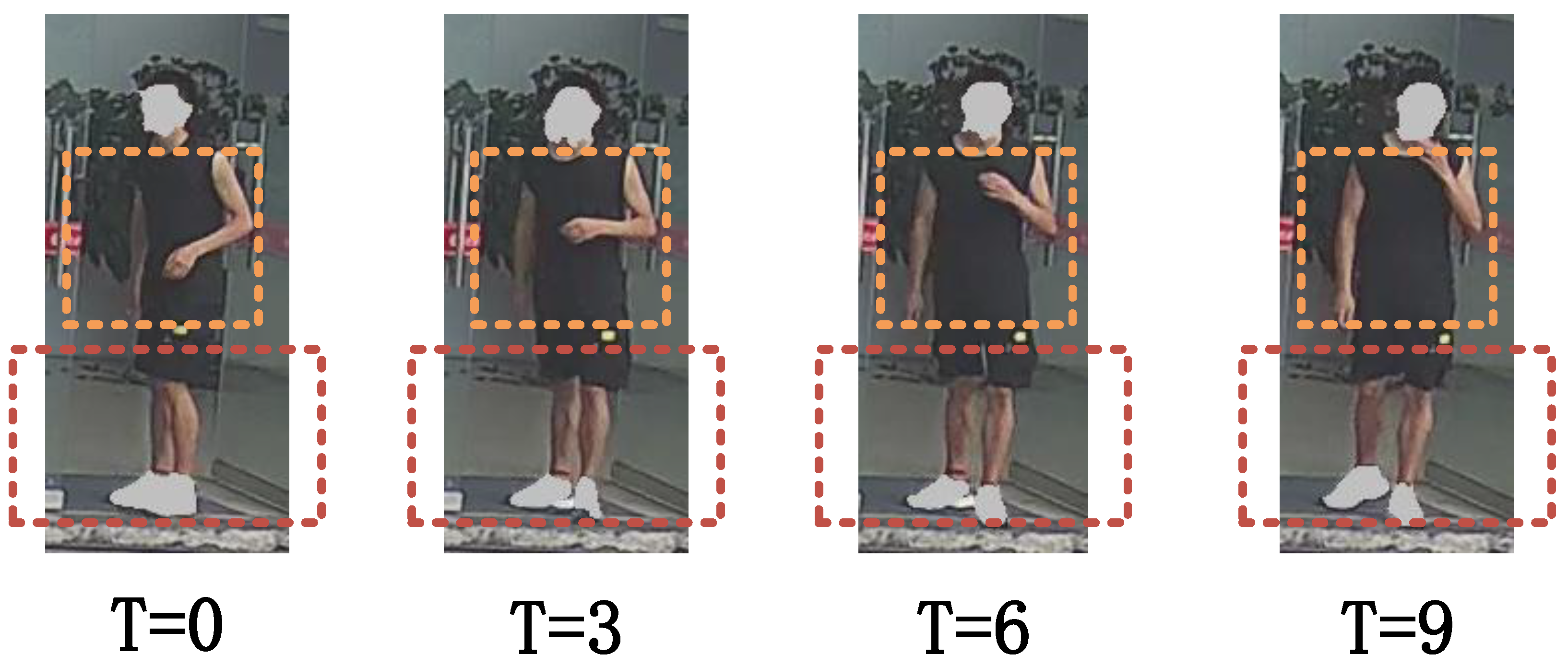
14]. However, there are still many challenges in practical application scenarios, especially in complex real-world scenarios where the model is often affected by multiple external factors. For example, factors such as viewpoint changes, occlusion, clothing changes, and carrying objects can negatively affect the model. These factors lead to increased diversity and uncertainty in gait features, and the robustness of gait recognition is difficult to ensure. As shown in
Figure 1, the dynamic changes of gait in complex scenes and the independent motion features in localized regions of the human body bring great challenges to feature extraction.
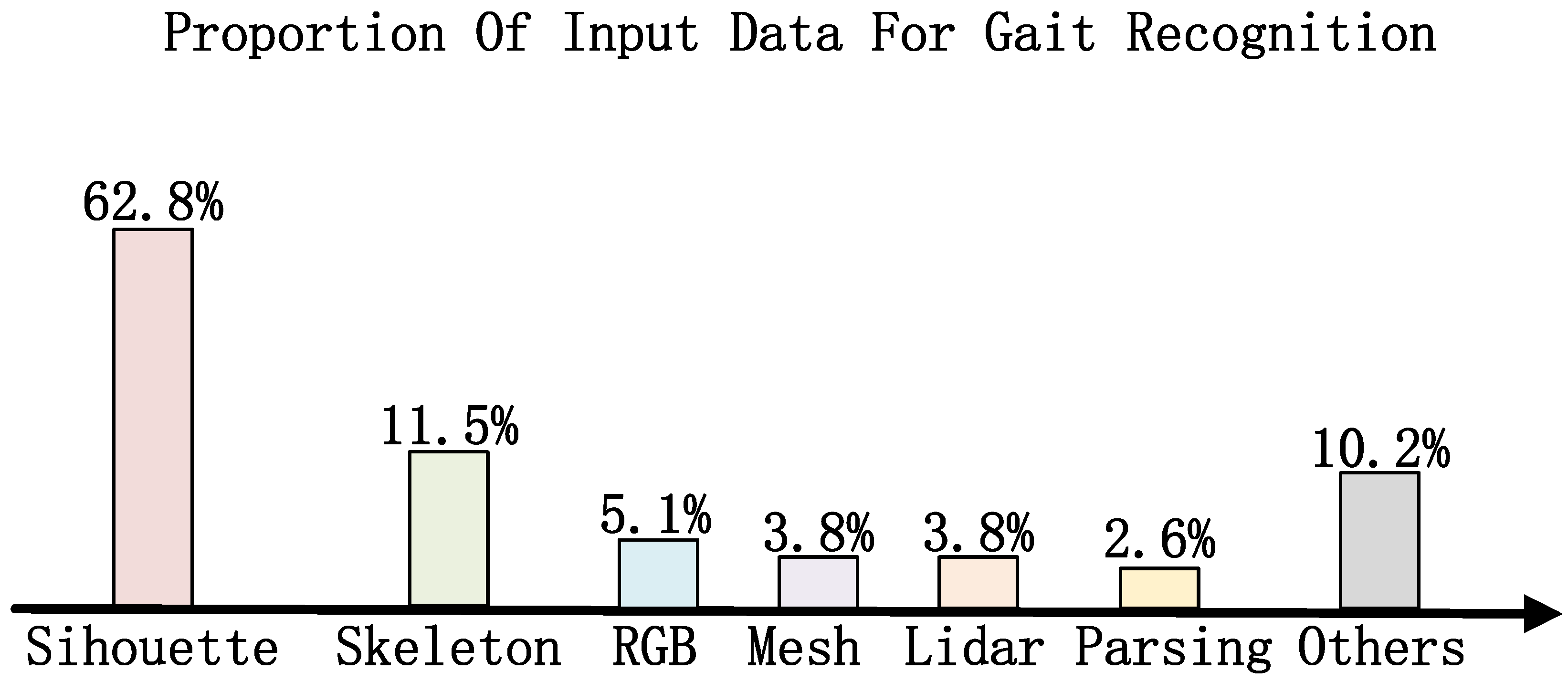
Existing gait recognition methods are generally divided into three primary categories: silhouette-based methods, skeleton-based methods, and multi-modal fusion-based methods. As shown in
Figure 2, the silhouette-based approach is one of the most commonly used methods, relying on extracting the silhouette features of the human body shape for modeling, and is especially good at modeling the overall dynamic features of gait. This approach has some challenges when dealing with complex scenes, such as viewpoint changes and occlusion, but its advantages in overall dynamic modeling are still obvious. Skeletal-based methods, on the other hand, perform feature extraction through human key points or skeleton maps, and although they perform better with clothing changes or partial occlusion, they have limited ability to capture detailed features and rely on high-quality key point detection. Multi-modal-based approaches combine multiple data sources (e.g., silhouette and skeleton) to further enhance model robustness and accuracy by integrating information from different modalities to capture gait features more comprehensively. However, multi-modal approaches impose higher requirements on data acquisition and processing, and the synchronization and fusion of data also increase system complexity and computational cost.
Recent research has concentrated on enhancing gait feature representations and improving model robustness in handling complex and dynamic scenarios.For example, GaitGL [
15] achieved effective extraction of overall and local features by combining global convolution and local feature masking mechanisms, thus significantly improving the differentiation ability of the model. GaitPart [
16] divides the human body into different parts and independently extracts the spatial and temporal representations for each part, enabling it to model short-term temporal dependencies. However, it overlooks the interconnectedness and joint movement of body parts during walking. In addition, GaitMGL [
17] integrates global-local spatial features and multi-scale temporal features to effectively capture motion patterns, improving gait recognition accuracy across diverse condition. These studies suggest that the improvement of gait recognition performance lies in the effective extraction and fusion of multiple features to cope with complex changes in real scenes.
To tackle the aforementioned challenges, this paper proposes the GaitRGA. Our GaitRGA module provides clustering-like information about the correlations between spatial locations in gait silhouettes, which is extremely helpful for inferring semantics and attention, particularly in gait images where human poses may be constrained. By explicitly exploring global relationships to mine structural information, we enable the attention mechanism to focus on discriminative body regions within the gait silhouette. Specifically, for each feature node (e.g., a feature vector at a spatial position on the feature map), we model the pairwise relations of this node with all other nodes and compactly stack these relations into a vector (representing global structural information). This vector is then combined with the node’s own feature to infer the attention strength via a compact model. This approach takes into account both the appearance features and their global relationships, determining feature importance from a global perspective.
Our main contributions can be summarized as follows:
1. We propose a method to determine feature importance from a global perspective by leveraging the appearance features and their global relationships. For each feature node, we build a compact representation by stacking its pairwise relations with all other nodes into a vector, and mine patterns from this representation to learn attention.
2. We introduce a relation-aware global attention mechanism, which compactly represents the global scope relations and infers attention based on these relations through two convolutional layers. We apply this design to both spatial (RGA-S) and channel (RGA-C) dimensions and demonstrate its effectiveness in gait recognition tasks.
3. GaitRGA
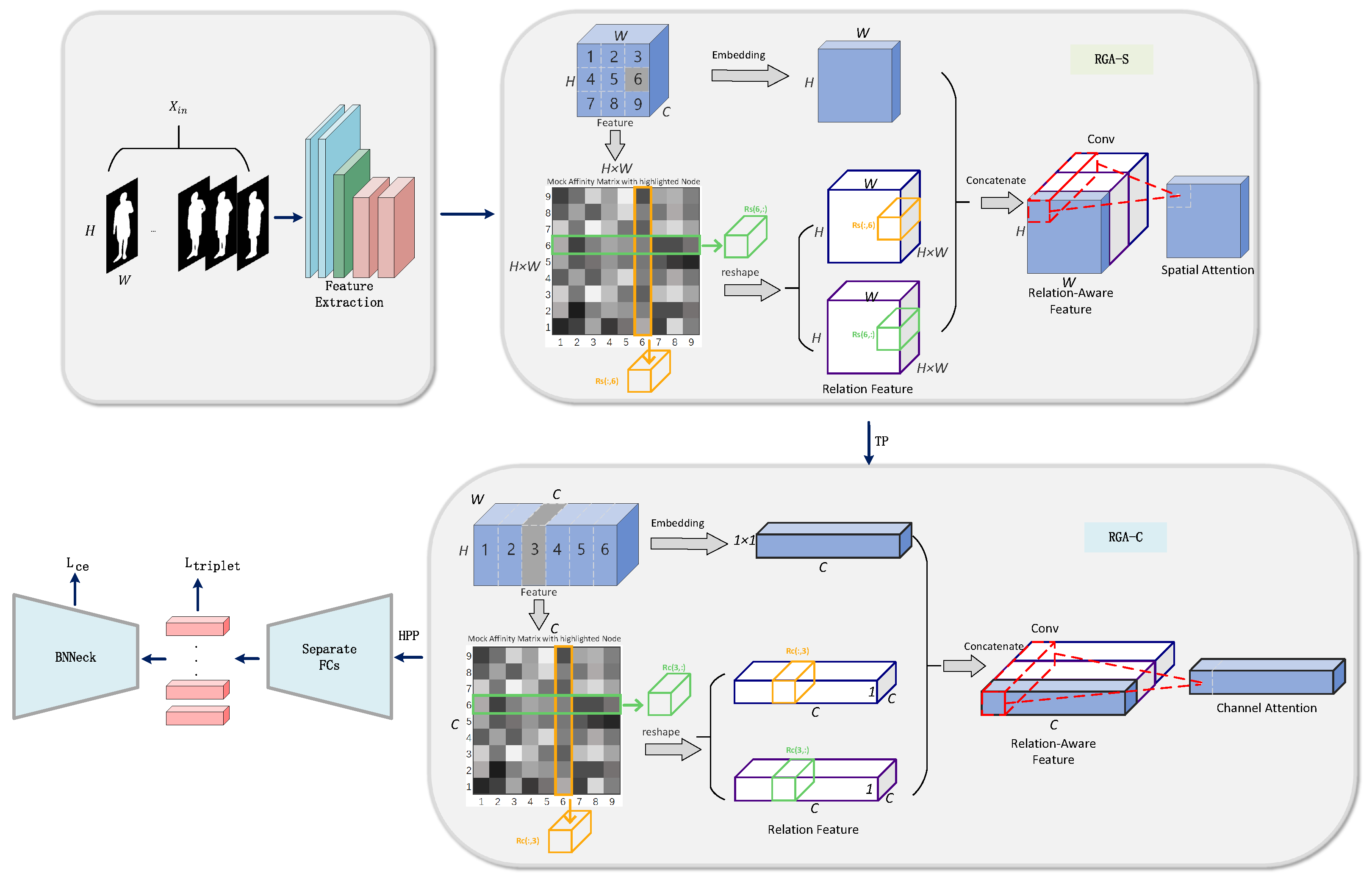
Our designed gait recognition network, illustrated in
Figure 3, first extracts features from the gait silhouette frames using a backbone network (ResNet-like), which converts the input multi-frame gait Silhouette sequences into a 3D feature map. RGA-S extracts features through edge enhancement to obtain edge weights, and multiplies the input features with the edge weights. Meanwhile, it computes spatial relationships and reshapes the spatial relationship matrix. Then, local features are extracted, and these local features are concatenated with spatial relationship information. Finally, the spatial network generates weights, which are ultimately applied to the features, the Time Pooling (TP) module applies max pooling along the temporal dimension to extract the feature mapping sequence and obtain global information. Next, RGA-C extracts channel weights through channel enhancement and multiplies the input features with the channel weights. Meanwhile, it computes channel relationships and reshapes the channel relationship matrix. Then, local features are extracted, and these local features are concatenated with channel relationship information. Finally, the channel network generates weights, which are ultimately applied to the features. The aggregated features are partitioned into multiple local region feature vectors by the Horizontal Pyramid Pooling (HPP) module, with each vector independently mapped to the metric space via a fully connected layer, resulting in high-dimensional embeddings. Finally, the feature distribution is refined using BNNecks, and the model is jointly optimized through ternary loss and cross-entropy loss.
The in equation denotes the ResNet-Like feature extractor, which serves to extract the feature from the silhouette gait sequence. denotes the RGA-S, denotes the RGA-C, stands for the Fc, and stands for the BNNecks.
3.1. Resnet-like
The development of CNN architectures has progressed from shallow to deep networks, leading to the introduction of outstanding backbone models like AlexNet, VGG-16, and ResNet [
28,
29,
30]. However, previous work in gait recognition [
18,
31,
32,
33,
34,
35,
36] relied heavily on ordinary convolutional neural networks consisting of a few basic convolutional layers. In GaitRGA, we refer to the class ResNet proposed by GaitBase [
33] as our feature extractor. The structure of this network is illustrated in
Table 1, where a 64 × 44 sized input feature map is input, and the number of channels is first extended to 32 channels by a 3 × 3 convolutional layer, followed by the BatchNorm2d and ReLU activation functions, the feature dimension is kept as (N, 32, 64, 44). The backbone part of the network consists of four layers, as shown in
Figure 4, and each layer contains a different number of residuals; Layer1 keeps the feature dimension unchanged; Layer2 and Layer3 are downsampled by convolution with stride = 2, and at the same time the number of channels is doubled, so that the feature map dimensions gradually changed to 32 × 22 and 16 × 11; the final Layer4 increases the number of channels to 256 and the output dimension is (N, 256, 16, 11). The whole process can be expressed mathematically as:
Assuming that the input is characterized by
x,
is obtained through activation operations after convolution and batch normalization. Where
and
are the convolution kernel and the bias term respectively, and · represents the convolution operation. Batch normalization is used to standardize the output after convolution to speed up training and improve model stability.
The formula describes the process of calculating residual blocks.
represents the result of the convolution operation on input
x. The convolution kernel set is
. The input
x and the convolution result
are added together and processed by the ReLU activation function.
3.2. Relation-Aware Global Attention
RGA enhances the model’s focus on important features by capturing the relationships between features across the entire global scope. Specifically, as shown in
Figure 5, it considers the relationships between each feature point and all other feature points, combining this relational information with the local features at that point, thus learning a more accurate attention weight for each feature point. The core idea of this method is to treat the pairwise relationships between features as global structural information, stacking these relations to create a comprehensive feature representation, which is then used by a shallow convolutional network to infer the importance of each feature point. In this way, RGA effectively understands the structural information in the image from a global perspective, allowing it to better select features that are useful for gait recognition tasks, while suppressing irrelevant distractions.
3.3. RGA-S
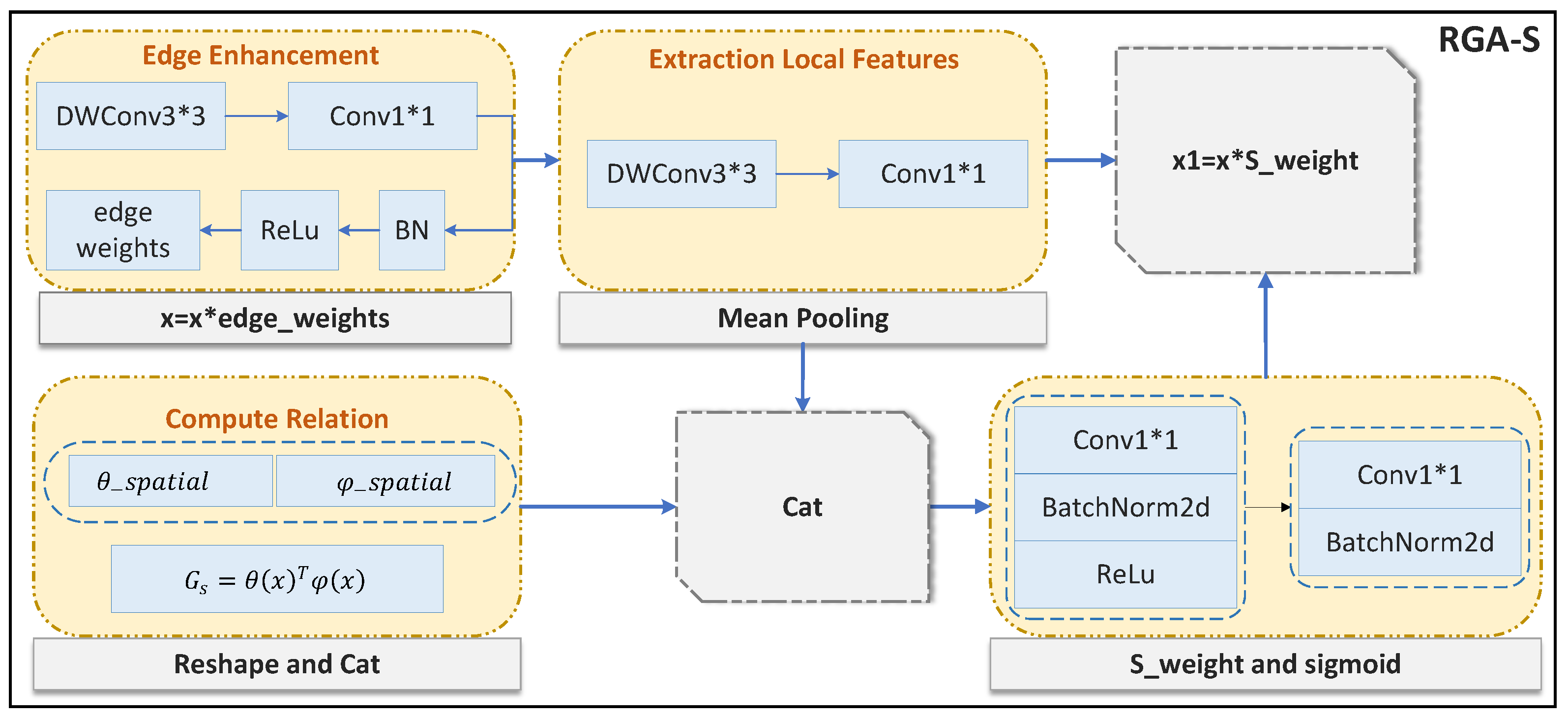
RGA-S optimizes feature representation in gait recognition by means of global spatial relationships. The core idea is to capture spatial relationships between features to improve the focus on key features. As show in
Figure 6. Assuming the input feature is
X, it first undergoes edge enhancement, where depthwise separable convolutions (DWConv3 × 3) and point convolutions (Conv1 × 1) are applied to output the edge enhancement weights. These weights are then multiplied with
X, resulting in
:
Among them, represents the input characteristics of the spatial information, which will be introduced to the pooling operation (pooling) for further processing. is used to calculate the spatial relations between feature points.
At the same time, the spatial relationships are calculated, and the spatial relationship matrix is reconstructed by transposing and concatenating the relations. Then,
passes through a 3 × 3 depthwise separable convolution and a 1 × 1 convolution, followed by mean pooling to reduce the feature dimensionality to a single channel, minimizing channel interference and improving the representation of local spatial features. The local features and spatial relationship information are then concatenated, and spatial networks generate weights, which are finally applied to the features:
where
represents the spatial attention coefficient of the
i-th feature point, which determines the degree of attention of each feature.
is the Sigmoid activation function.
and
are the weight matrices of the convolution layer for feature conversion and weighting operations.
In this way, RGA-S is able to better capture the global structure in the image and help the model focus on the most discriminative part of the gait image, thus improving the effectiveness and robustness of the gait recognition task.
3.4. RGA-C
RGA-C is a channel attention mechanism designed for gait silhouette images, focusing on enhancing the channel dimension of feature representations. Assume a feature
, where
. As shown in
Figure 7, The process begins with a channel enhancement module, which generates channel weights through adaptive average pooling and a series of convolution operations, emphasizing important channel information. The core component is channel relationship modeling, which calculates the similarity matrix between channels to capture the dependencies between them, Similar to spatial relationships, the pairwise relationship
from node
i to node
j is defined as an affine transformation in the embedding space:
represents the channel information of the feature extraction, and
represents the transform operation of the feature, used to calculate the relationship between
and
.
To avoid gradient vanishing issues, RGA-C introduces a temperature scaling mechanism when computing the channel attention, dividing by the square root of the feature dimension. Then, RGA-C combines the global features with the channel self-attention and passes them through multiple convolution layers to generate the final channel attention weights. These weights are normalized through a sigmoid function and applied to the original features, enhancing the key channels.
4. Exeperiments
This section assesses GaitRGA’s effectiveness using three widely recognized datasets, including Grew [
34], Gait3D [
32] and SUSTech1k [
35]. First, we introduce these datasets and the corresponding training configurations. Subsequently, we conduct comparisons against the most advanced gait recognition methods under identical experimental setups. Finally, we will determine how the various components of GaitRGA affect performance through ablation experiments This section may be divided by subheadings. It should provide a concise and precise description of the experimental results, their interpretation as well as the experimental conclusions that can be drawn.
4.1. Datasets
Three popular datasets are used in this paper, covering a diverse range of needs from large-scale field scenarios to laboratory environments. These include the widely used large-scale field datasets Grew [
34] and Gait3D [
32], and the small-scale gait dataset SUSTech1k [
35] released by the Southern University of Science and Technology.
Table 2 demonstrates the information on identity and number of sequences contained in each dataset.
Grew [
34] serves as a large-scale dataset tailored for gait recognition in real-world scenarios. Designed to address challenges in gait recognition under unconstrained environments, it incorporates diverse and complex variations. Grew [
34] encompasses a total of 26,345 identities and 128,671 sequences, which were recorded using 882 cam eras strategically placed in public areas, which providing multiple data types such as silhouettes, poses, and optical flow. The dataset is split into training and test sets, with the training set comprising the majority of sequences and the test set structured for rigorous evaluation. During testing, specific sequences are designated as probes, while the remaining sequences constitute the gallery. With its wide range of occlusions, lighting conditions, multi-view variations, and dynamic environments, Grew [
34] serves as an excellent benchmark for evaluating the generalizability of gait recognition models in real-world scenarios.
Gait3D [
32] serves as a comprehensive dataset designed specifically for 3D gait recognition. designed to provide a resource for research on dense 3D representations and gait recognition in realistic scenarios. Gait3D [
32] is a 39-camera shot at a hypermarket that includes 4000 identity counts and 25,309 sequence counts, and has three data types: 2D, 3D representations, and raw RGB frames. The dataset is divided into training and test sets, where the training set includes 18,940 gait sequences from 3000 identities, while the test set comprises 6369 gait sequences from 1000 identities. During testing, one sequence is chosen at random to act as the probe for each identity, while the remaining sequences constitute the gallery. With its complex occlusions, dynamic backgrounds, viewpoint variations, and gait irregularities, the dataset is ideal for evaluating the adaptability of gait recognition models in real-world scenarios.
SUSTech1K [
35] represents a pioneering large-scale dataset for LiDAR-based gait recognition, designed to explore the potential of point cloud data in this field. especially for the application of 3D representations in realistic scenarios. SUSTech1K [
35] consists of 1050 identity counts and 25,239 sequence counts, and has three data types: LIDAR (high-precision 3D point cloud data), RGB images (with corresponding silhouette maps), and synchronized frames as three data types. It is separated into a training set, a validation set, and a test set. The training set includes 250 identities with a total of 6011 sequences; the validation set also contains 250 identities with a total of 6025 sequences. and the test set contains 550 identities with 13,203 sequences, and the test data is divided into subsets based on different attributes (e.g., carrying items, clothing changes, occlusion, etc.) during the testing phase.
The official protocol is followed in all our experiments, following the protocol for training, testing, library and probe set partitioning strategies to obtain relevant experimental data, using the main evaluation metric Rank-k (k = 1, 5, 10, 15, 20) [
37] to evaluate our experiments. Where Rank-k refers to the probability of correctly identifying the target among the first k candidates in the search result. mAP comprehensively considers the average accuracy under different recall rates. mINP measures a model’s ability to identify the most difficult samples.
4.2. Implementation Details
We will present the hyper-parameters used by GaitRGA for the experiments with different datasets, as shown in
Table 3, where we used the following settings.
In our experiments, the batch size for training is represented as (N, S), with N indicating the ID (i.e., tag number) and S representing the sequence number per tag. For the Grew and Gait datasets, the batch size is set to (32, 4), while for the SUSTech1K dataset, it is configured as (8, 8).
The SGD optimizer was employed for back propagation, utilizing an initial learning rate of 0.05, a momentum value of 0.9, and a weight decay rate of 0.0005 to ensure effective training and regularization of the model parameters. For the Grew dataset, a factor of 10 reduction in the learning rate is applied at 80 k, 120 k, and 150 k rounds. For the Gait3D dataset, a total of 60 k steps were trained, and the learning rate was reduced by a factor of 10 on rounds 20 k, 40 k, and 50 k. For the SUSTech1K dataset, the learning rate decayed by a factor of 10 on 20 k, 40 k rounds and a total of 50 k rounds were trained.
To reduce the impact of noise, we applied data augmentation techniques on the Grew [
34], SUSTech1k [
35] dataset, including random perspective transform, horizontal flip, rotational transform, and random erasure with a probability of 20%. This study was conducted on 8 NVIDIA GeForce RTX 1070TI GPUs (64 G video memory) using the PyTorch deep learning framework (1.13.1) with CUDA11.7 in an experimental environment.
4.3. Comparison with Other Methods
4.3.1. Evaluate on Grew Dataset
We compare our method with the current SOTA approaches on the large-scale Grew [
34]. As shown in
Table 4, from experimental results, GaitRGA surpasses all existing approaches, achieving an accuracy improvement of 8.78% over QAGait [
19] which is one of the most recent silhouette-based gait recognition methods. The results in the table demonstrate that GaitRGA achieves the highest Rank-1 accuracy of 67.88%, significantly surpassing other methods like GaitSet [
20], GaitPart [
16] and GaitBase [
33], which achieve 46.3% and 44.0%, respectively. In addition, the Rank-5, Rank-10, and Rank-20 accuracies of GaitRGA also show a similar trend, with values of 82.14%, 86.31%, and 89.35%, respectively, further highlighting its superior performance across all evaluation metrics. These results confirm that our model is highly effective in capturing gait features in complex real-world field scenes, and its ability to adapt to real-world gait recognition tasks is significantly better than existing methods. GaitRGA’s strong performance across all metrics indicates its robustness and its ability to handle challenges like viewpoint variations, occlusion, and diverse walking environments more effectively than current state-of-the-art models.
4.3.2. Evaluate on Gait3D Dataset
The results on the Gait3D [
32] clearly highlight the outstanding performance of the GaitRGA model in practical applications. As shown in
Table 5, it achieves significant improvements compared to the latest existing gait recognition methods. These results highlight the continued research potential of silhouette-based gait recognition approaches in advancing the field of gait recognition. GaitRGA has achieved significant improvement in various key indicators. Specifically, GaitRGA achieved a Rank-1 accuracy of 61.23%, a Rank-5 accuracy of 80.51%, a mean Average Precision (mAP) of 53.64%, and a minimum Inverse Negative Penalty (mINP) of 35.81%. Compared with other contour-based methods such as GaitSet [
20], GaitPart [
16], DAGait [
16], our method far outperforms them. GaitRGA is also significantly superior to skeletonization methods such as GaitGraph2 [
39], GPGait [
41], and SkeletonGait [
25].
4.3.3. Evaluate on SUSTech1k Dataset
Results from the SUSTech1k [
35] demonstrate the comprehensive performance of GaitRGA in multi-scene gait recognition. As shown in
Table 6, GaitRGA achieves an overall accuracy of 59.72% across multiple scenes, highlighting its effectiveness in handling complex environments. The table presents a detailed comparison of the recognition accuracy across different scenes, where GaitRGA consistently outperforms existing methods in both challenging and controlled environments.In particular, the model shows a strong performance in Scene Carrying, achieving an accuracy of 59.85%. Additionally, in more complex scenes like Scene Umbrella and Scene Uniform, where factors such as lighting variations and occlusions are prevalent, GaitRGA still maintains an impressive recognition accuracy of 58.21% and 58.74%, respectively. These results underline the robustness of GaitRGA in real-world scenarios, where environmental variations play a significant role.
4.4. More Experiments
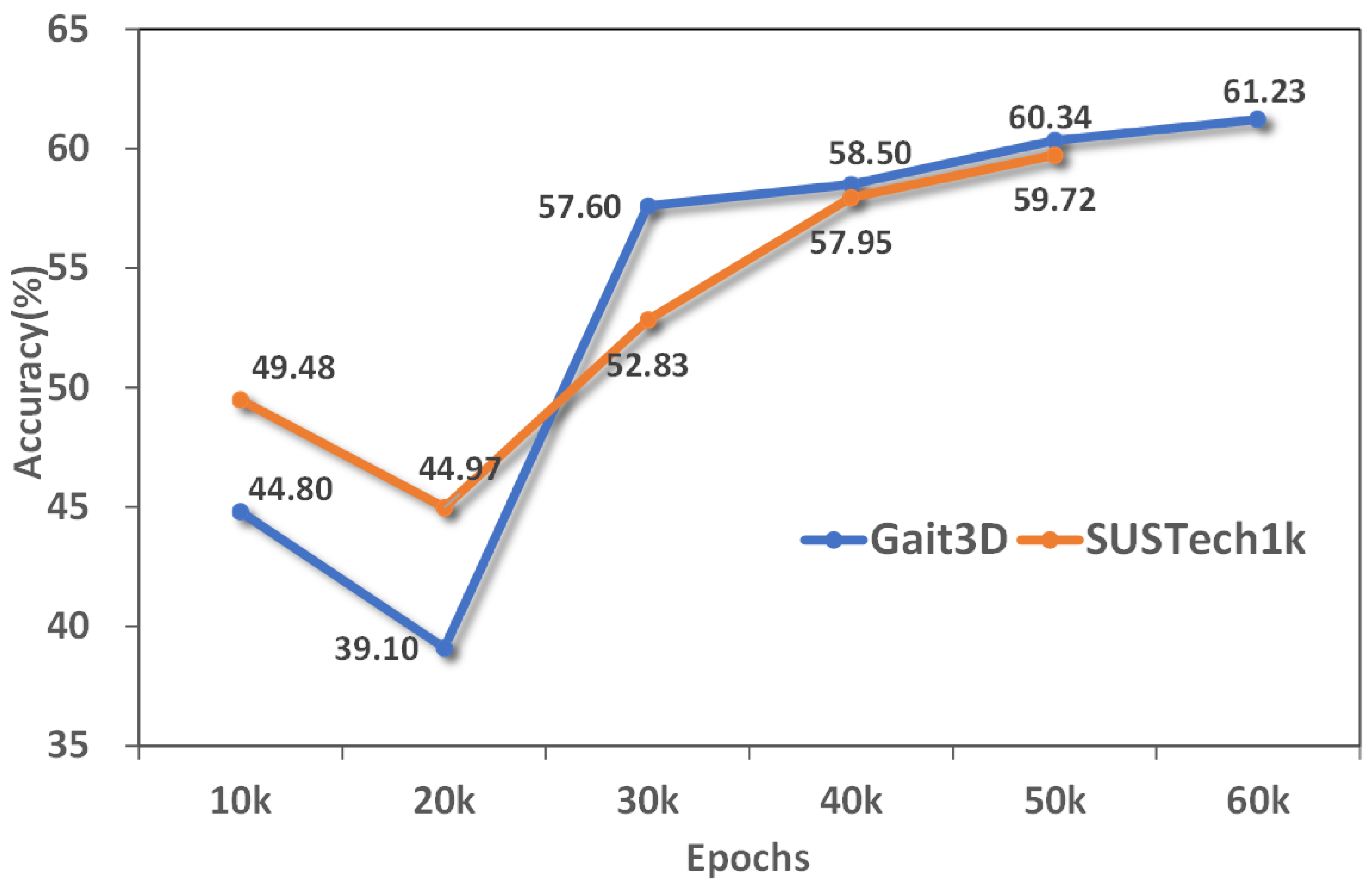
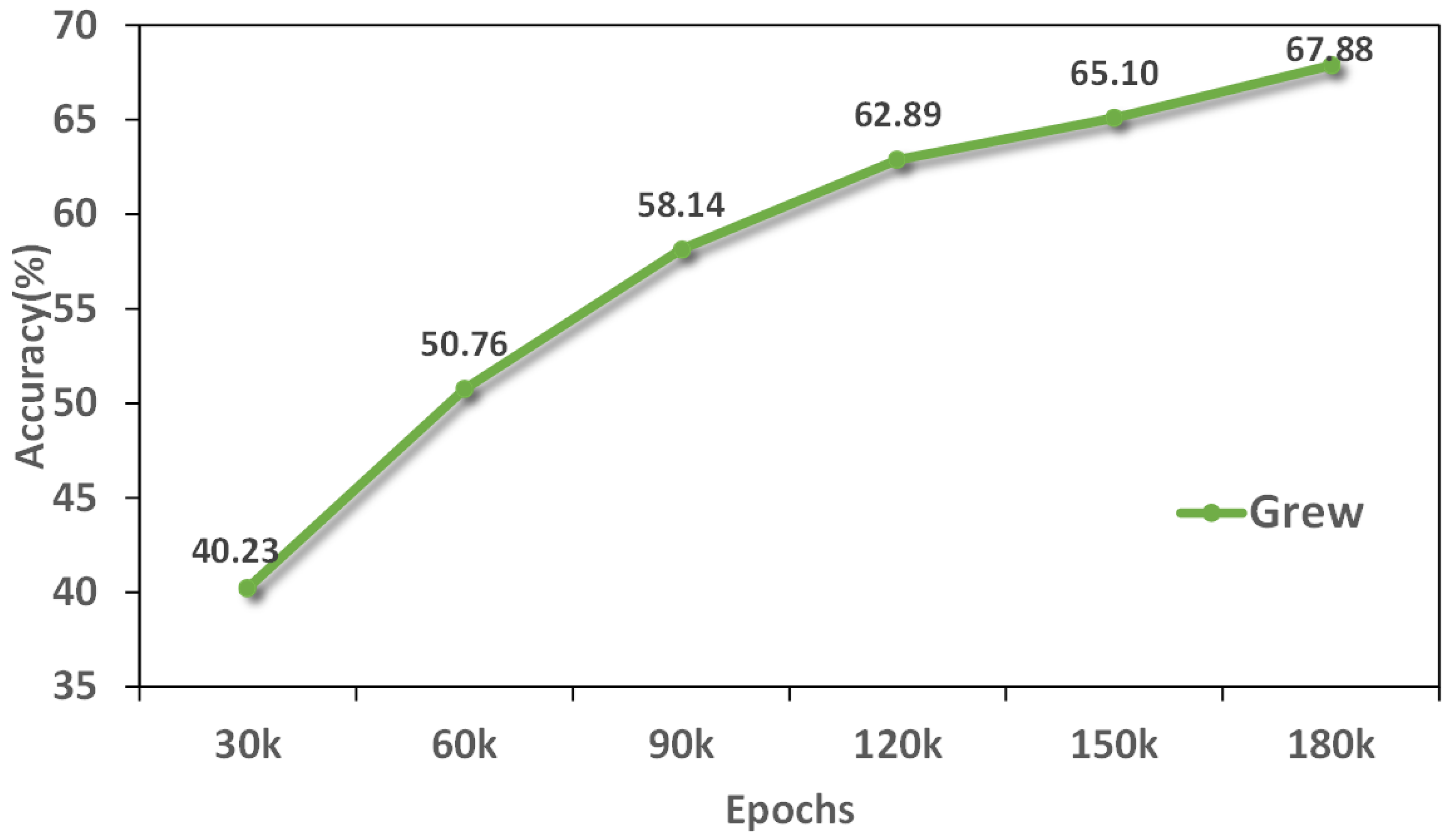
We explored the Rank-1 accuracy changes of the three data sets under different training rounds. With the increase of training rounds, the accuracy of the two data sets is gradually improved and tends to be stable, indicating that the model is converging gradually. As shown in
Figure 8, The accuracy of Gait3D data set increased steadily, while SUSTech1k showed large fluctuations and eventually stabilized at a higher accuracy. As shown in
Figure 9, The accuracy of the Grew data set continued to improve and eventually converged. In general, with the increase of training rounds, the speed of accuracy improvement gradually slows down, indicating that the learning effect of the model tends to be saturated and close to its upper limit of performance.
Compared with GaitBase’s 19.29030 M, GaitRGA’s 20.01906 M is 0.72876 M longer, but the Rank-1 accuracy on Gait3D and Grew data sets is 6.53% and 7.78% higher than GaitBase’s, respectively. GaitRGA has achieved a significant improvement in performance compared to GaitBase, although the number of parameters is only increased by about 0.7 M. This shows that the GaitRGA model achieves a good balance between the parameter efficiency and the accuracy of gait recognition. By introducing innovative designs such as the global attention mechanism, GaitRGA can enhance the ability to extract and distinguish gait features effectively while maintaining relatively few model parameters, especially in the case of complex gait changes and different data sets.
This improvement is not only due to the simple increase in model complexity, but also due to the feature learning capability optimized by GaitRGA, which enables the model to better capture key dynamic information in gait, especially in the face of changing gait data. This result proves that GaitRGA not only performs well in the utilization of computing resources, but also shows a good prospect in the improvement of accuracy, showing its potential as a new generation model in the field of gait recognition.
6. Conclusions
Conclusion This paper presents a Silhouette Relation-Aware Global Attention (Silhouette RGA) module optimized for gait silhouette images, which effectively addresses the challenges of noise interference and insufficient feature representation in gait recognition. Unlike traditional attention mechanisms, our approach not only learns attention through local convolutional operations but also comprehensively considers the global structural information between features. By simultaneously exploring relationships in both spatial and channel dimensions, our RGA module can more accurately capture discriminative features in gait silhouettes. Specifically, the Spatial Attention (RGA-S) module highlights the structural information of gait silhouettes through an edge enhancement mechanism, effectively extracting body part features in walking postures. Meanwhile, the Channel Attention (RGA-C) module focuses on the relationships between different feature channels, enhancing the ability to express dynamic gait patterns. By stacking these two attention mechanisms, the model forms an end-to-end network structure that effectively suppresses background interference and enhances perception of key body parts. Extensive experiments demonstrate that our proposed Relation-Aware Global Attention module achieves significant performance improvements compared to baseline models, proving the importance of global structural information for extracting discriminative features in gait. This approach does not require additional human semantic information (such as pose or segmentation masks) and can effectively learn more robust feature representations relying solely on gait silhouette images, providing a simple yet effective solution for gait recognition in practical applications.Future work will further explore the modeling of gait sequence relationships across time scales and how to more effectively incorporate richer appearance invariant features to further improve the robustness and adaptability of the model in complex environments. We will continue to optimize the model structure in subsequent studies to address this challenge.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}