
Research on Digital Twin Modeling and Fault Diagnosis Methods for Rolling Bearings

Abstract
1. Introduction
2. Rolling Bearing Digital Twin Modeling
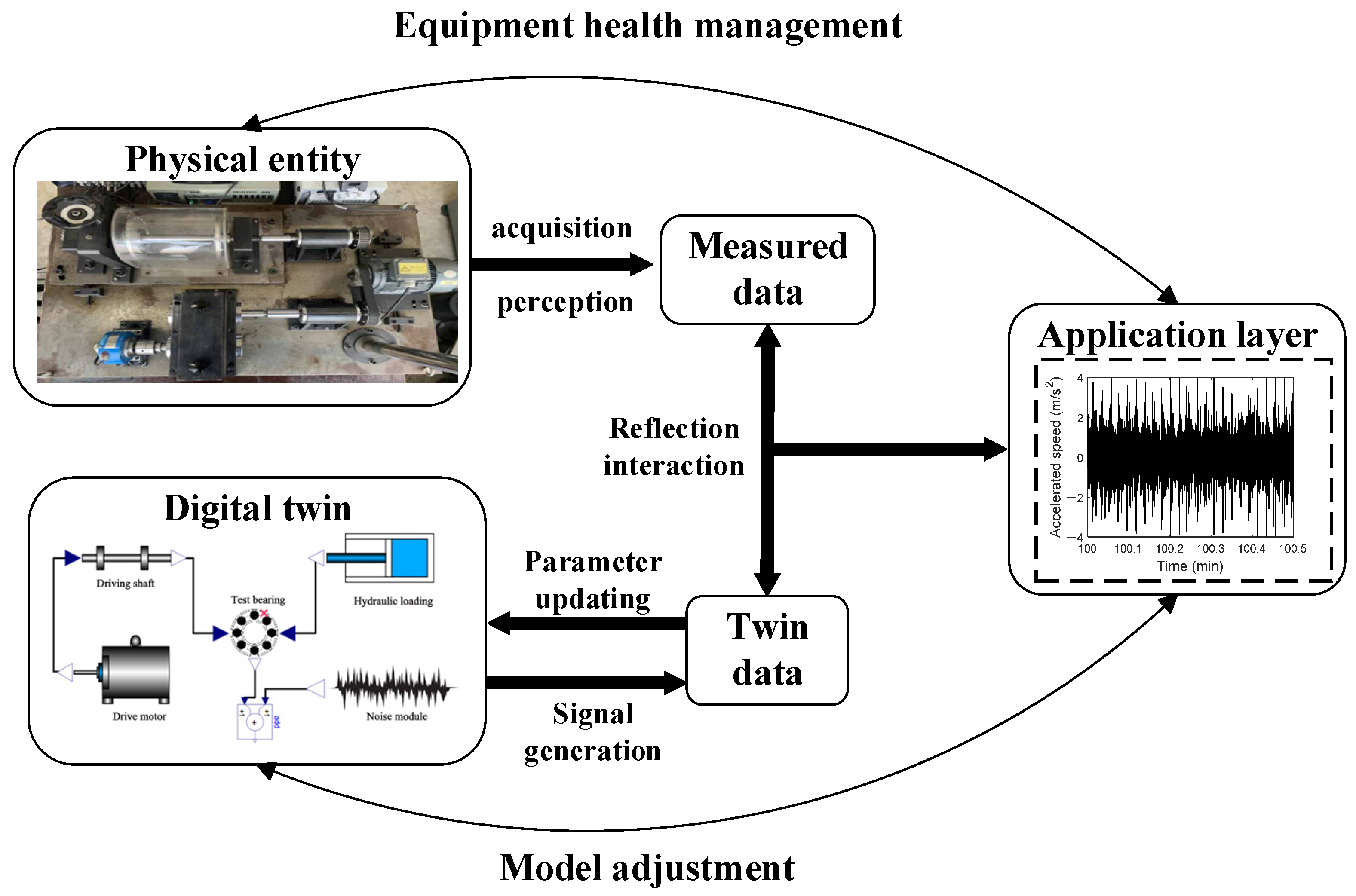
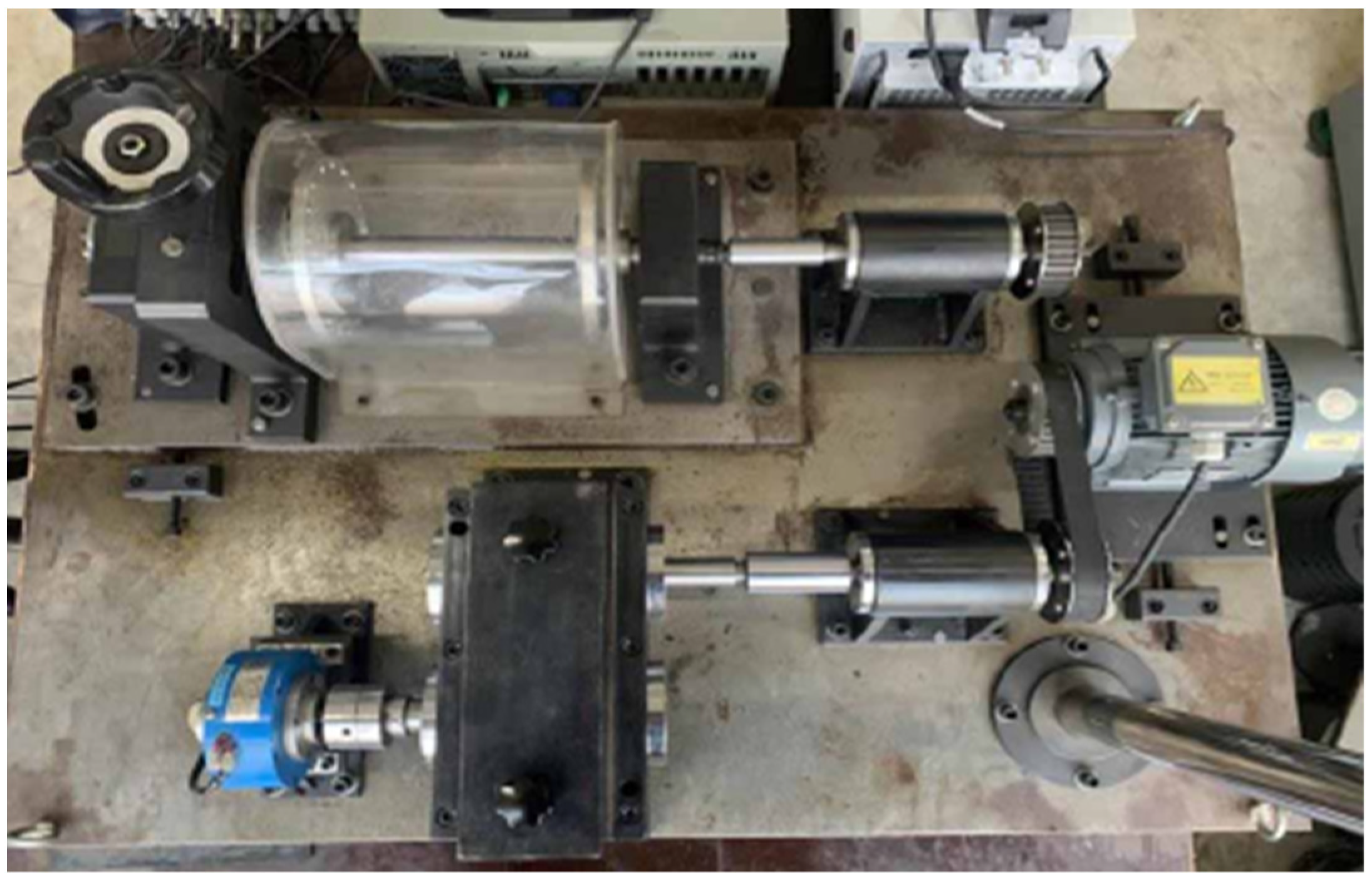
2.1. Digital Twin System Framework for Rolling Bearings
2.2. Rolling Bearing Fault and Degradation Analysis and Signal Selection Method
3. Digital Twin Integrated Model Construction for Rolling Bearings
3.1. Bearing Dynamics Analysis
- (1)
- All components are modeled using the concentrated mass method;
- (2)
- There is no inertia moment;
- (3)
- There are no geometric errors between the rolling elements and the contact surfaces of the inner and outer rings;
- (4)
- The contact between the rolling elements and the inner and outer rings follows Hertzian theory;
- (5)
- All damping is assumed to be linear viscous.
3.2. Hybrid Noise Module Component Analysis
4. Operation of the Digital Twin and Model Update
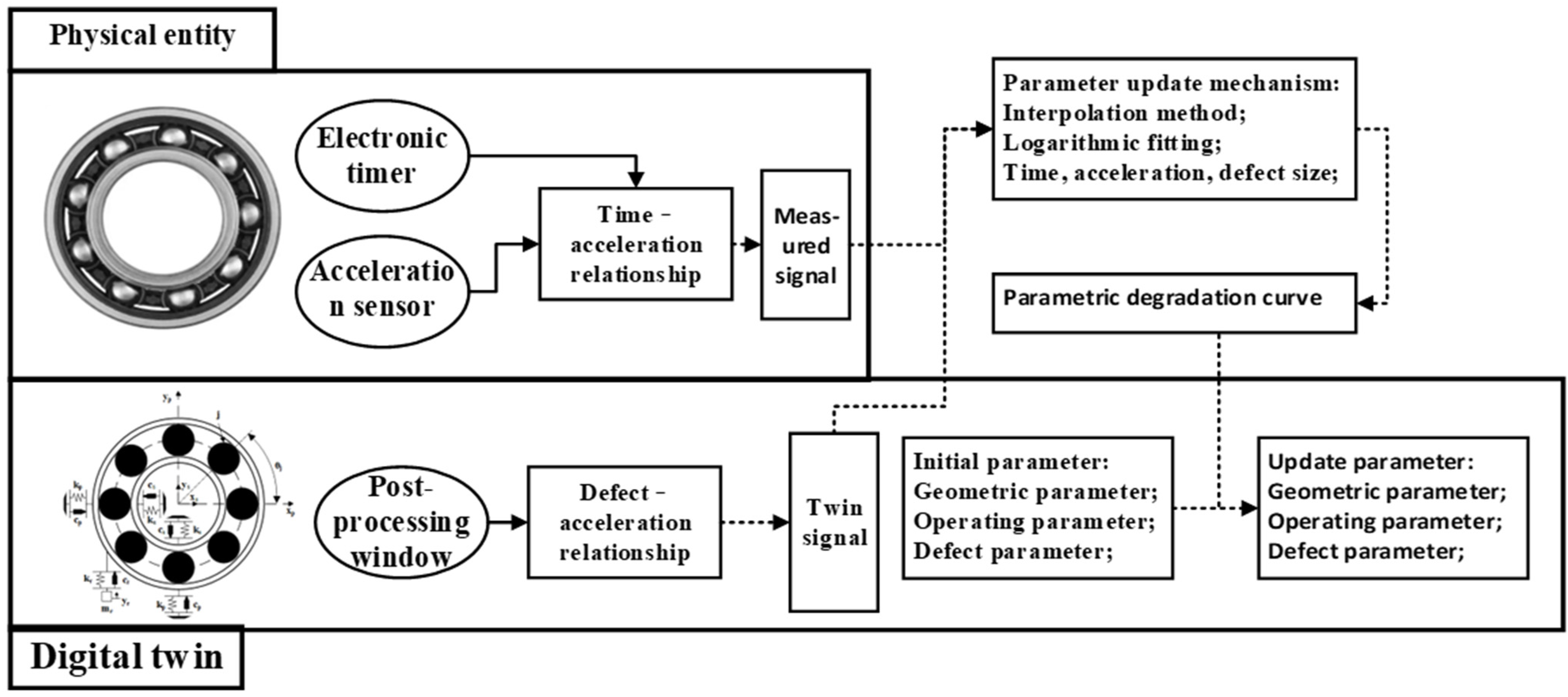
4.1. The Design Flowchart of Model Update
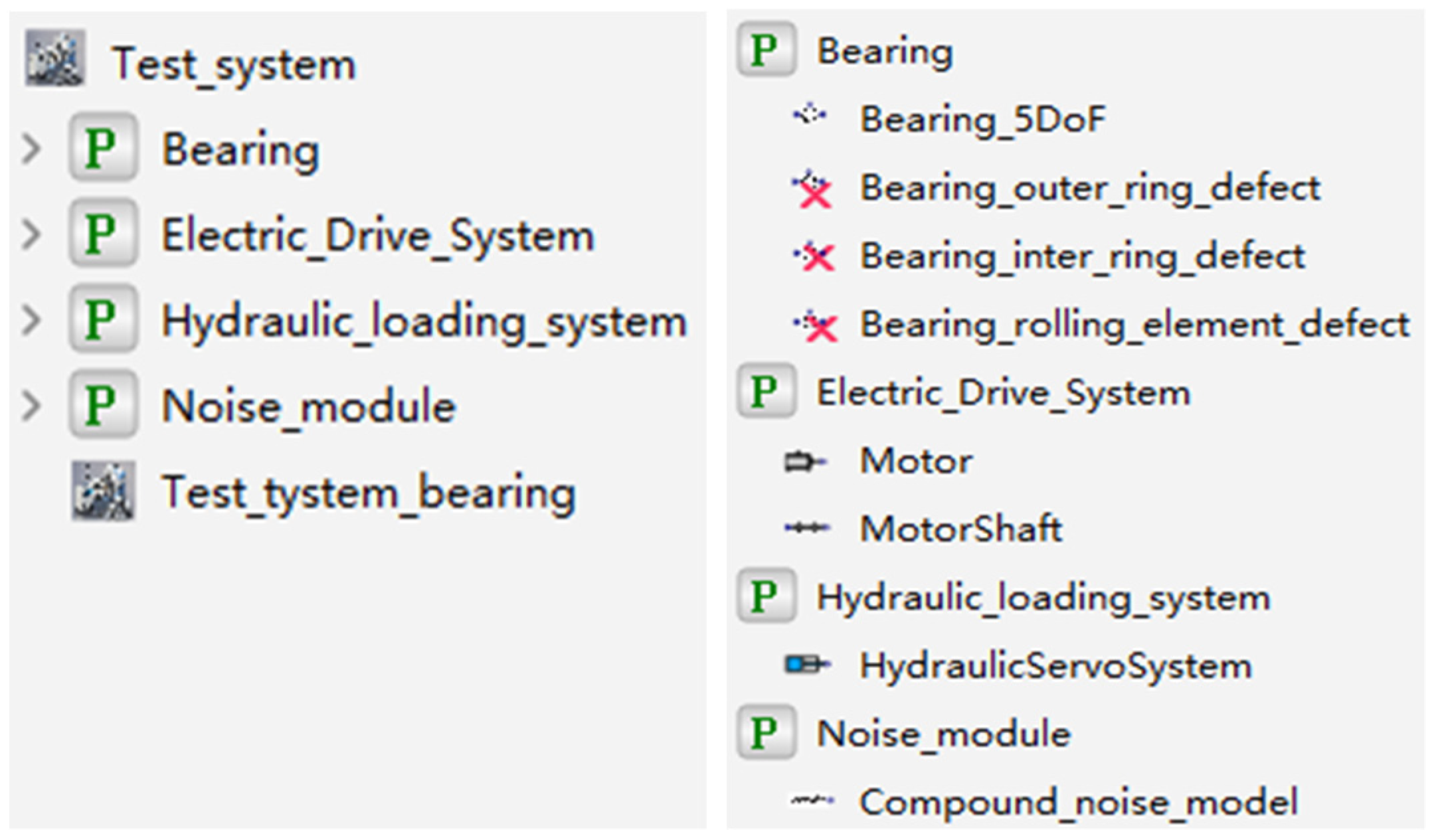
4.2. Construction of Digital Twin System
4.3. Healthy State
4.4. Outer Race Fault State
4.5. Parameter Update and Degradation Signal Generation
5. Digital Twin Signal Validation Experiment
5.1. Experimental Data and Digital Twin Model Parameters
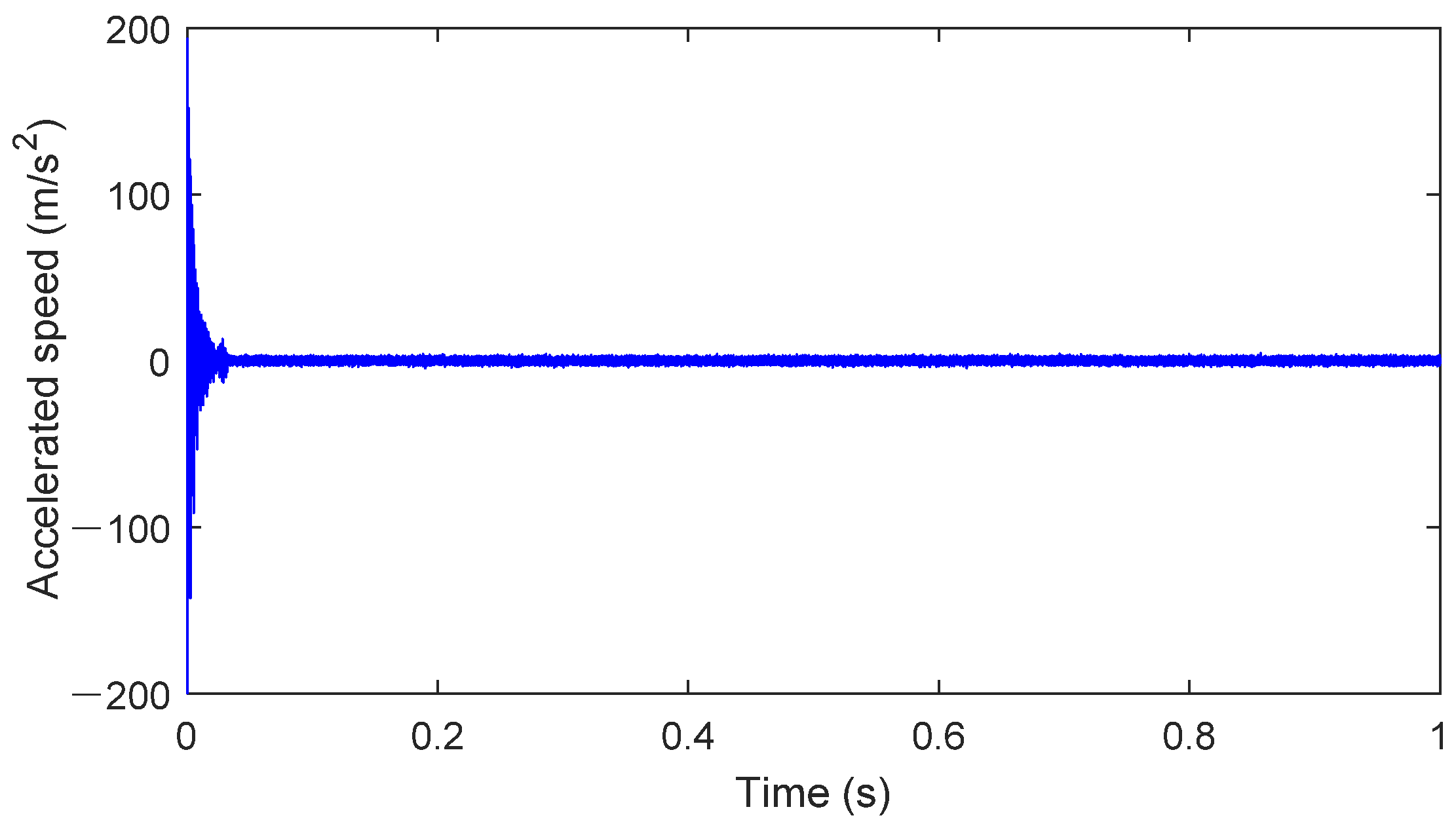
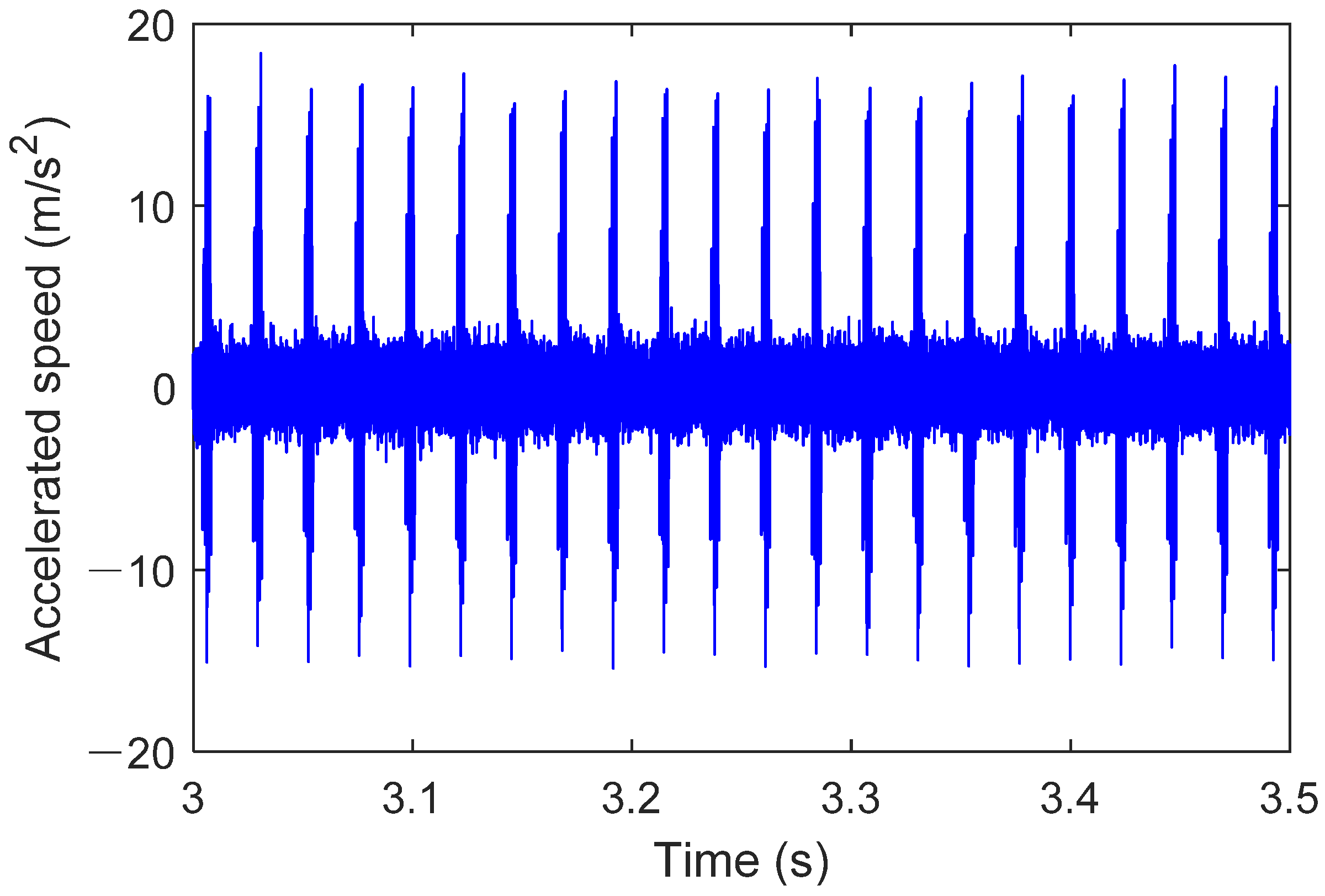
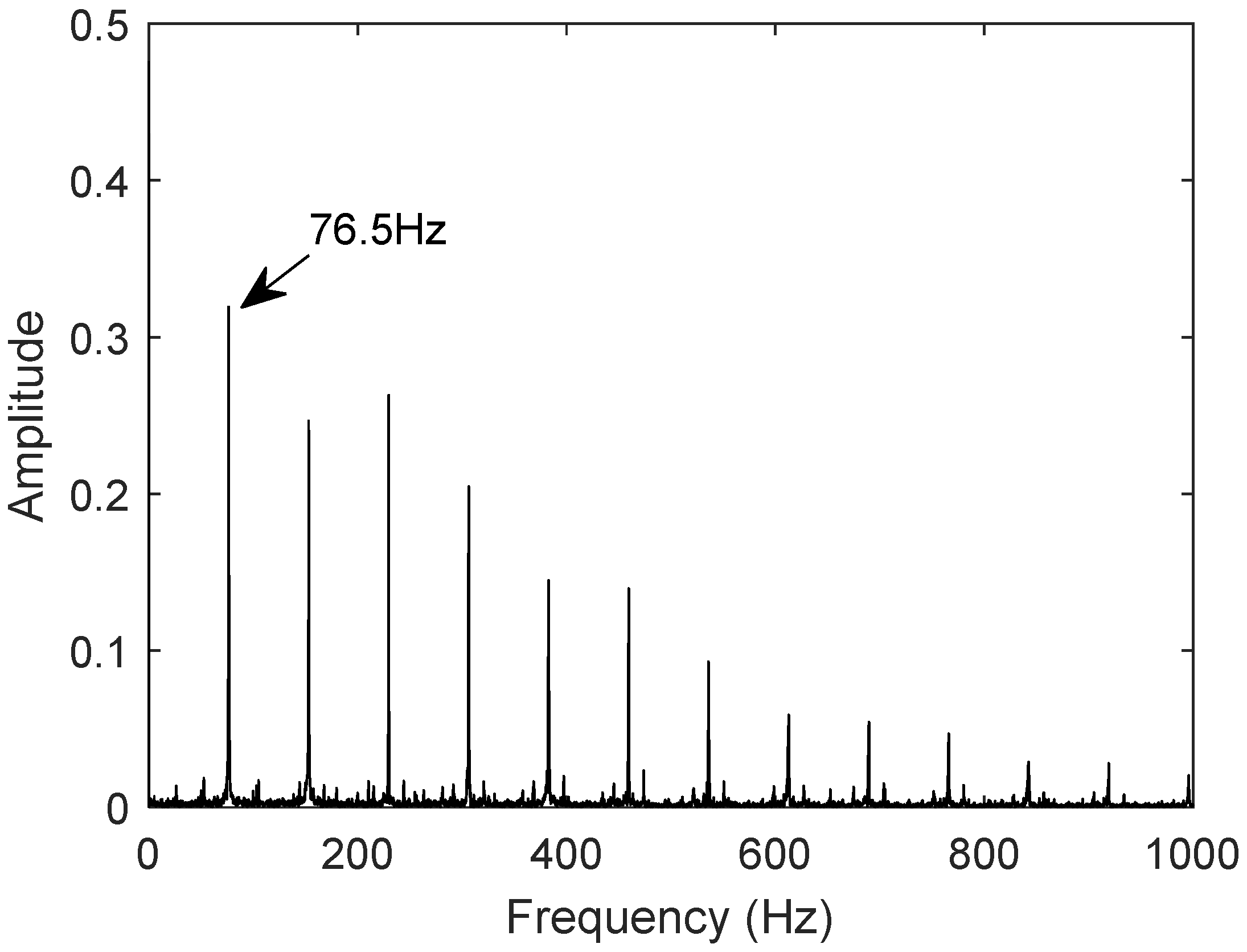
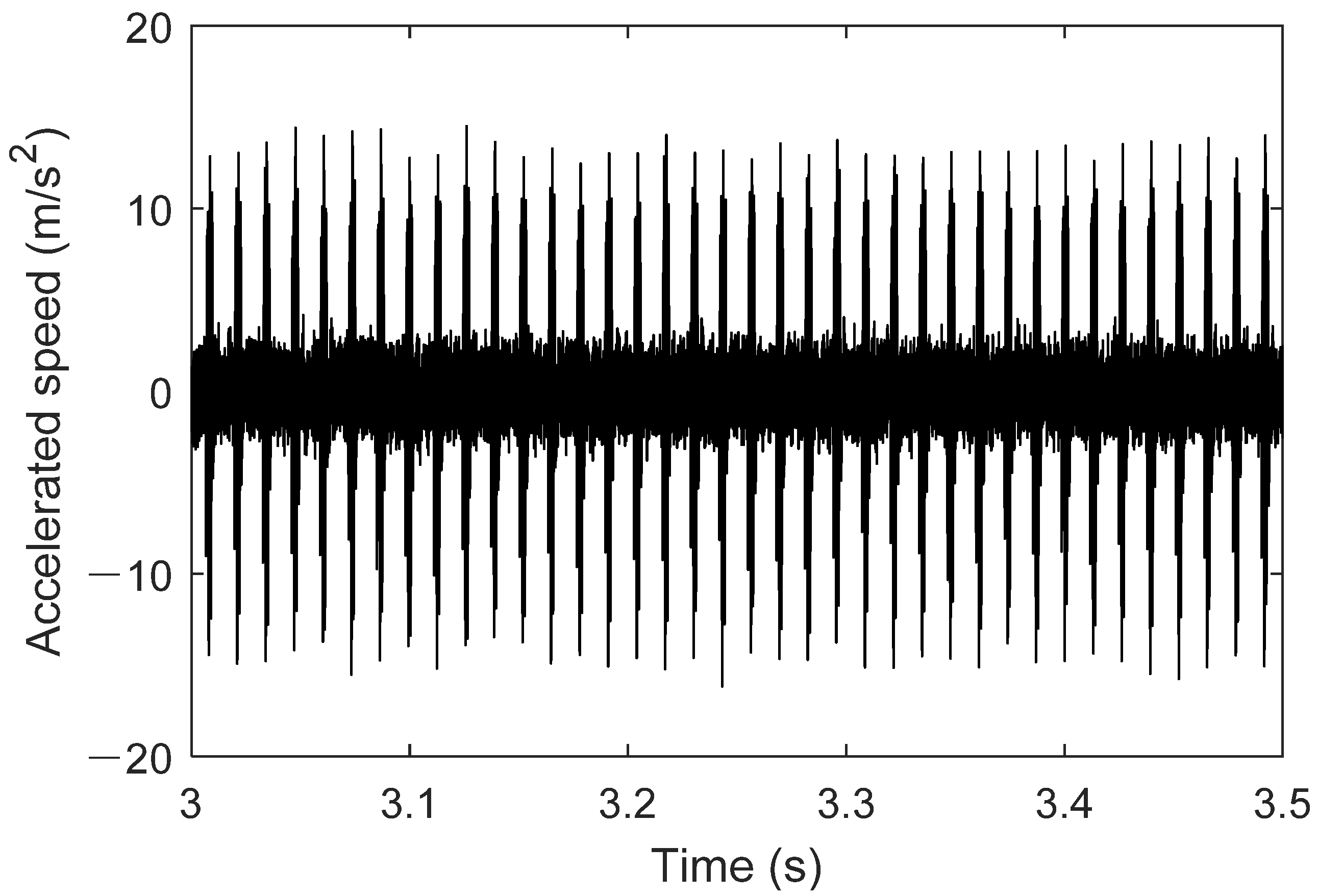
5.2. Fault Signal Analysis
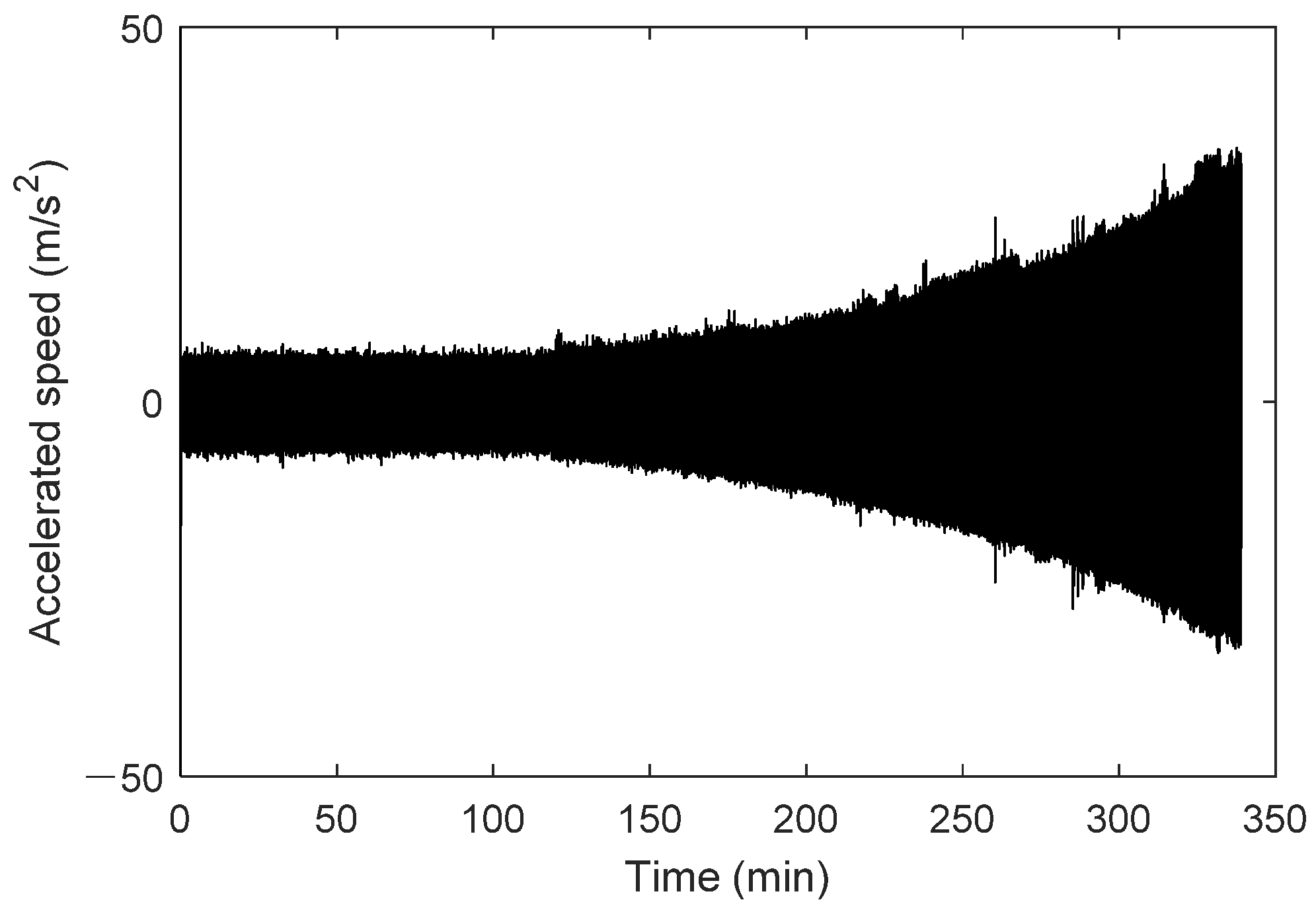
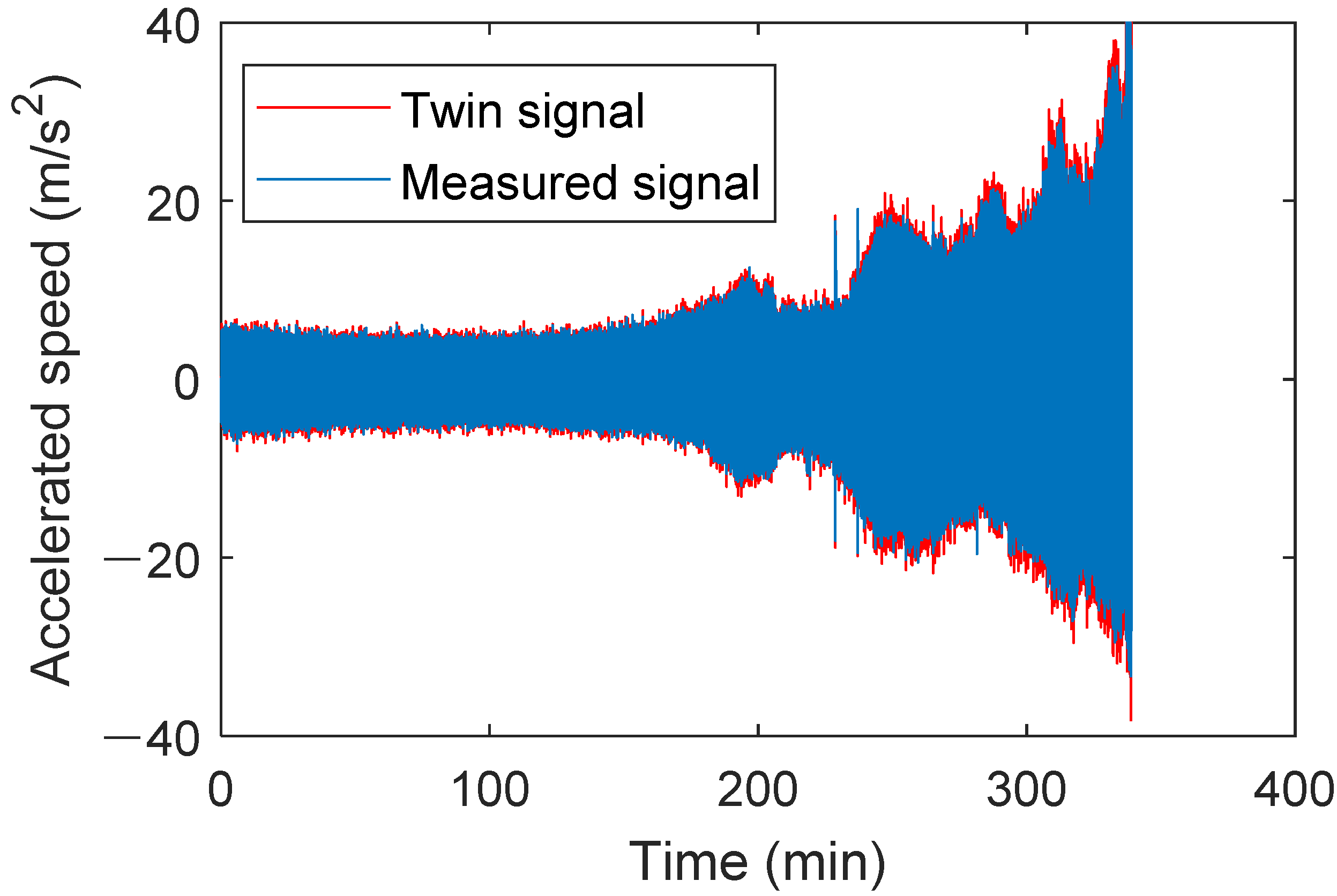
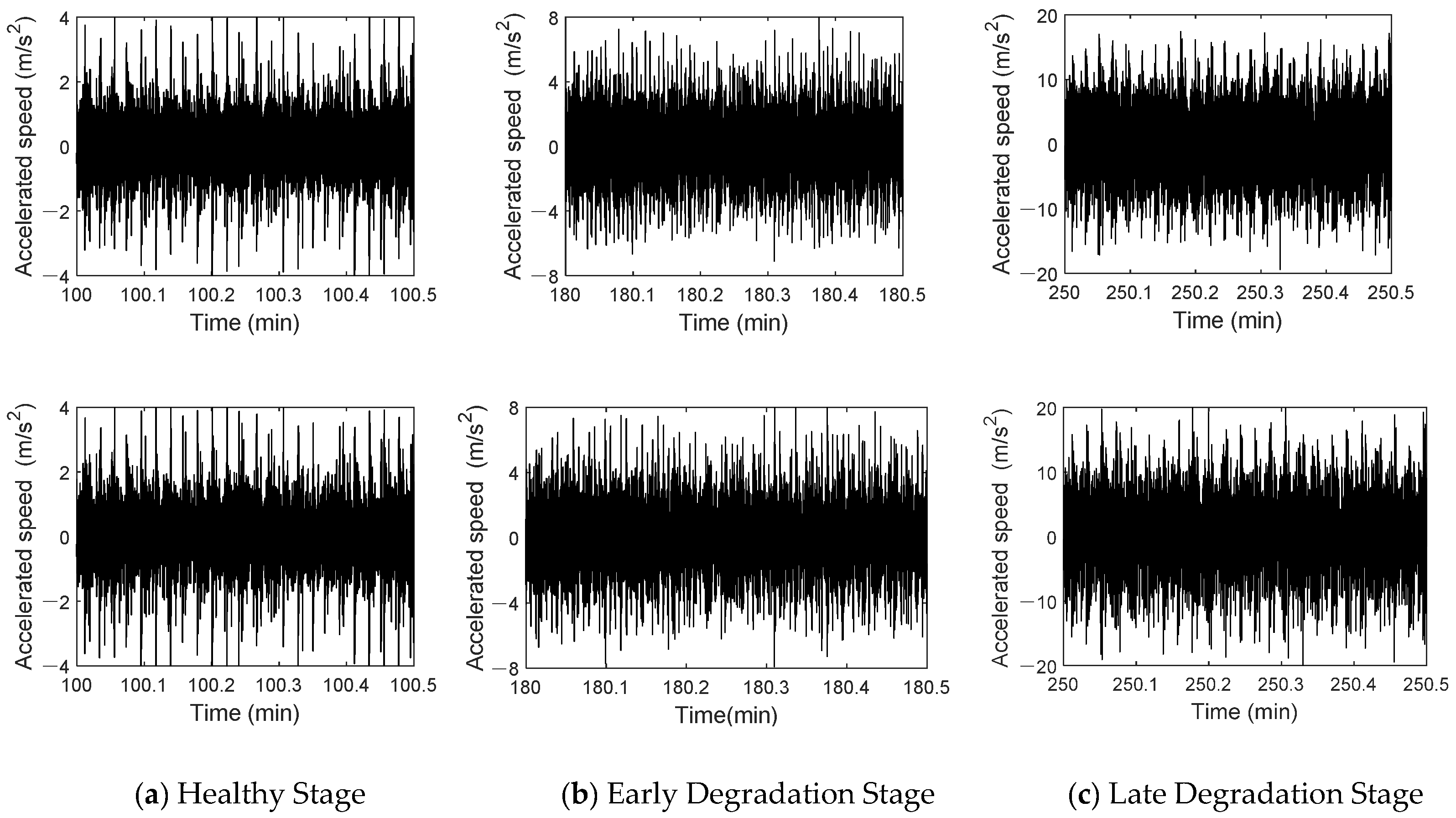
5.3. Full-Life Signal Analysis
6. Conclusions
- (1)
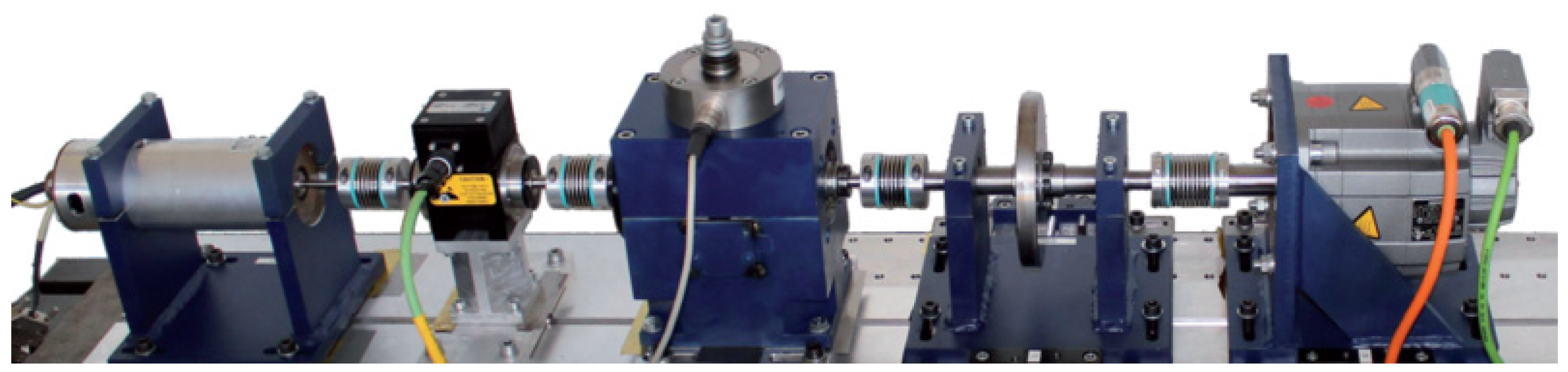
- A complete rolling bearing digital twin system is proposed to take rotating mechanical components, specifically rolling bearings, as the research object and integrate digital twin technology. This system mainly consists of the physical entity, digital twin, twin information, data connection, and application layers. The physical entity refers to the bearing testing system of the rotating machinery vibration and fault test bench. At the same time, the digital twin is the rolling bearing integrated model built in Modelica language. A deep-learning-based fault diagnosis model is incorporated as the application layer.
- (2)
- Based on the availability of data and the requirements for constructing the digital twin system, the acceleration vibration signal of the rolling bearing is chosen as the data signal. As one of the most critical components of the digital twin system, the rolling bearing integrated model encompasses bearings in various states, with the bearing drive-end and load-end models included in the digital twin model construction. A hybrid noise component is provided to simulate the bearing’s actual operating state and lifecycle degradation process. Through this model, sufficient and reliable bearing fault data and twin data can be generated.
- (3)
- The German Paderborn University bearing dataset and the XJTU-SY accelerated life test dataset from Xi’an Jiaotong University were used for the experiments. The experimental results show that the digital twin signal verification experiments mainly validate the accuracy and usability of the digital twin signals. By comparing the time-domain waveforms and frequency-domain features of the twin signals and measured signals, it is demonstrated that the twin signals can effectively simulate the vibration characteristics of bearings under fault and degradation conditions. The rational combination of measured and twin data can balance the cost of data acquisition and the model’s prediction accuracy, providing a feasible solution to address data scarcity in practical applications. This demonstrates the feasibility of digital twin technology.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lei, Y.G.; Han, T.Y.; Wang, B.; Li, N.; Yan, T.; Yang, J. XJTU-SY Rolling Bearing Accelerated Life Test Datasets: A Tutorial. J. Mech. Eng. 2019, 55, 1–6. [Google Scholar] [CrossRef]
- Kim, H.; Tan, A.; Mathew, J.; Choi, B.-K. Bearing fault prognosis based on health state probability estimation. Expert Syst. Appl. 2012, 39, 5200–5213. [Google Scholar] [CrossRef]
- Muruganatham, B.; Sanjith, M.; Krishnakumar, B.; Murty, S.S. Roller element bearing fault diagnosis using singular spectrum analysis. Mech. Syst. Signal Process. 2013, 35, 150–166. [Google Scholar] [CrossRef]
- Tian, Y.; Ma, J.; Lu, C.; Wang, Z. Rolling bearing fault diagnosis under variable conditions using LMD-SVD and extreme learning machine. Mech. Mach. Theory 2015, 90, 175–186. [Google Scholar] [CrossRef]
- Ali, J.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–17. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ding, Q. Cross-domain fault diagnosis of rolling element bearings using deep generative neural networks. IEEE Trans. Ind. Electron. 2019, 66, 5525–5534. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, Y.; Guo, L.; Gao, H.; Hong, X.; Song, H. A new bearing fault diagnosis method based on modified convolutional neural networks. Chin. J. Aeronaut. 2020, 33, 439–447. [Google Scholar] [CrossRef]
- Lu, S.X.; Gao, Z.W.; Xu, Q.F.; Jiang, C.; Zhang, A.; Wang, X. Class-Imbalance Privacy-Preserving Federated Learning for Decentralized Fault Diagnosis With Biometric Authentication. IEEE Trans. Ind. Inform. 2022, 18, 9101–9111. [Google Scholar] [CrossRef]
- Civera, M.; Surace, C. An Application of Instantaneous Spectral Entropy for the Condition Monitoring of Wind Turbines. Appl. Sci. 2022, 12, 1059. [Google Scholar] [CrossRef]
- Guo, Y.; Zhou, J. Research progress of bearing defect detection based on machine vision. J. Mech. Electr. Eng. 2024, 41, 761–774. [Google Scholar] [CrossRef]
- Tao, T.F.; Zhou, W.J.; Kuang, J.C. Bearing Fault Diagnosis Method of Deep Convolutional Neural Network Based on Multi-wavelet Decomposition. J. Xi’an Jiaotong Univ. 2024, 58, 31–41. [Google Scholar] [CrossRef]
- Lu, S.X.; Gao, Z.W.; Zhang, P.; Xu, Q.; Xie, T.; Zhang, A. Event-Triggered Federated Learning for Fault Diagnosis of Offshore Wind Turbines With Decentralized Data. IEEE Trans. Autom. Sci. Eng. 2024, 21, 1271–1283. [Google Scholar] [CrossRef]
- Wu, J.Y.; Shu, Q.L.; Wang, G.; Li, M.; Wei, Y. Research on Small Sample Fault Diagnosis of Rolling Bearing Based on DDPM Diffusion Model. Modul. Mach. Tool Autom. Manuf. Tech. 2024, 12, 117–122. [Google Scholar] [CrossRef]
- Zou, S.; Dong, S.J.; Xia, Z.Y. Multi-source Domain Transfer Diagnosis Method for Rolling Bearings Based on Features Disentanglement and Joint Domain Alignment. J. Vib. Shock 2025, 44, 113–120+133. [Google Scholar] [CrossRef]
- Hui, Y.; Zhang, Y.; Chen, Z.C.Y. Bearing Early Fault Identification and Condition Monitoring Based on Dynamic Difference Index. Meas. Sci. Technol. 2024, 35, 056115.1–056115.12. [Google Scholar] [CrossRef]
- Babu, T.N.; Saraya, J.; Singh, K.; Prabha, D.R. Rolling Element Bearing Fault Diagnosis Using Discrete Mayer Wavelet and Fault Classification Using Machine Learning Algorithms. J. Vib. Eng. Technol. 2025, 13, 87. [Google Scholar] [CrossRef]
- Ta, Y.T.; Cui, J.; Wang, J.T.; Yang, N.; Han, F.; Li, F. Health Prediction of Rolling Bearing Based on Digital Twin. Manuf. Technol. Mach. Tool 2022, 11, 156–162. [Google Scholar] [CrossRef]
- Ma, L.; Jiang, B.; Xiao, L.; Lu, N. Digital Twin-Assisted Enhanced Meta-Transfer Learning for Rolling Bearing Fault Diagnosis. Mech. Syst. Signal Process. 2023, 200, 110490. [Google Scholar] [CrossRef]
- Zhang, C.; Ma, Z.W.; Liu, B.; Sun, Z.; Xu, J. Digital Twin Driven Few-Shot Prediction of Remaining Useful Life for Rotating Machinery. J. Xi’an Jiaotong Univ. 2023, 57, 168–178. [Google Scholar] [CrossRef]
- Huang, X.F.; Xie, T.L.; Luo, S.Y.; Wu, J.; Luo, R.; Zhou, Q. Incremental Learning with Multi-Fidelity Information Fusion for Digital Twin-Driven Bearing Fault Diagnosis. Eng. Appl. Artif. Intell. 2024, 133, 108212. [Google Scholar] [CrossRef]
- Shi, H.T.; Yang, T.; Hu, Y.; Song, Z. A Model-Data Combination Driven Digital Twin Model for Few Samples Fault Diagnosis of Rolling Bearings. Meas. Sci. Technol. 2024, 35, 1361–6501. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Zhou, X.; Gao, C.; Lin, J.; Ren, Z.; Feng, K. Contrastive Learning-Enabled Digital Twin Framework for Fault Diagnosis of Rolling Bearing; IOP Publishing Ltd.: Bristol, UK, 2024; Volume 36, pp. 1361–6501. [Google Scholar] [CrossRef]
- Ming, Z.; Tang, B.; Deng, L.; Yang, Q.; Li, Q. Digital Twin-Assisted Fault Diagnosis Framework for Rolling Bearings Under Imbalanced Data. Appl. Soft Comput. 2025, 168, 112528. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, M.; Cheng, J.F. Digital Twin Workshop: A New Paradigm for Future Workshop. Comput. Integr. Manuf. Syst. 2017, 23, 1–9. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.R.; Zhang, M. Five-Dimension Digital Twin Model and Its Ten Applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. [Google Scholar] [CrossRef]
- Ding, H.; Yang, L.L.; Yang, Z.J.; Wang, Y. Health Prediction of Shearers Driven by Digital Twin and Deep Learning. China Mech. Eng. 2020, 31, 815–823. [Google Scholar] [CrossRef]
- Weber, C.; Königsberger, J.; Kassner, L.; Mitschang, B. M2DDM—A Maturity Model for Data-Driven Manufacturing. Procedia CIRP 2017, 63, 173–178. [Google Scholar] [CrossRef]
- Autiosalo, J. Platform for Industrial Internet and Digital Twin Focused Education, Research, and Innovation: Ilmatar the Overhead Crane. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 241–244. [Google Scholar] [CrossRef]
- Qin, Y.; Liu, H.; Mao, Y. Faulty Rolling Bearing Digital Twin Model and Its Application in Fault Diagnosis with Imbalanced Samples. Adv. Eng. Inform. 2024, 61, 102513. [Google Scholar] [CrossRef]
- Cui, L.; Xiao, Y.; Liu, D.; Han, H. Digital Twin-Driven Graph Domain Adaptation Neural Network for Remaining Useful Life Prediction of Rolling Bearing. Reliab. Eng. Syst. Saf. 2024, 245, 109991. [Google Scholar] [CrossRef]
- Diwang, R.; Jin, W.; Jianping, Y.; Gühmann, C. CNN Parameter Design Based on Fault Signal Analysis and Its Application in Bearing Fault Diagnosis. Adv. Eng. Inform. 2023, 55, 101877. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source | Data Source | Data Source |
|---|---|---|
| Vibration Sensor | Bearing Vibration Signal | High-frequency Time Series Data |
| Temperature Sensor | Bearing Temperature Signal | Low-frequency Time Series Data |
| CNC System | Shaft Speed/Motor Speed | Low-frequency Time Series Data |
| CNC System | Drive Motor Current | High-frequency Time Series Data |
| Symbol | Meaning | Value | Symbol | Meaning | Value |
|---|---|---|---|---|---|
| D0 | Bearing outside diameter | 39.8 mm | Di | Bearing bore diameter | 29.3 mm |
| D | Bearing pitch diameter | 34.55 mm | Db | Rolling diameter | 7.92 mm |
| B | Bearing width | 15 mm | nb | Number of rolling elements | 8 |
| α | Contact Angle | 0° | C | Basic dynamic load rating | 12,820 N |
| C0 | Basic static load rating | 6650 N |
| Fault Type | Theoretical Fault Characteristic Frequency (Hz) |
|---|---|
| Outer race damage (BPFO) | 76.35 |
| Inner race damage (BPFI) | 123.64 |
| Rolling element damage (BSF) | 49.92 |
| Cage rotation (FTF) | 9.54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, J.; Zhao, L.; Li, M. Research on Digital Twin Modeling and Fault Diagnosis Methods for Rolling Bearings. Sensors 2025, 25, 2023. https://doi.org/10.3390/s25072023
Fan J, Zhao L, Li M. Research on Digital Twin Modeling and Fault Diagnosis Methods for Rolling Bearings. Sensors. 2025; 25(7):2023. https://doi.org/10.3390/s25072023
Chicago/Turabian StyleFan, Jiayi, Lijuan Zhao, and Minghao Li. 2025. "Research on Digital Twin Modeling and Fault Diagnosis Methods for Rolling Bearings" Sensors 25, no. 7: 2023. https://doi.org/10.3390/s25072023
APA StyleFan, J., Zhao, L., & Li, M. (2025). Research on Digital Twin Modeling and Fault Diagnosis Methods for Rolling Bearings. Sensors, 25(7), 2023. https://doi.org/10.3390/s25072023