
Digital Twins for 3D Confocal Microscopy: Near-Field, Far-Field, and Comparison with Experiments

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Experiment
3. Working Principles of the Digital Twins
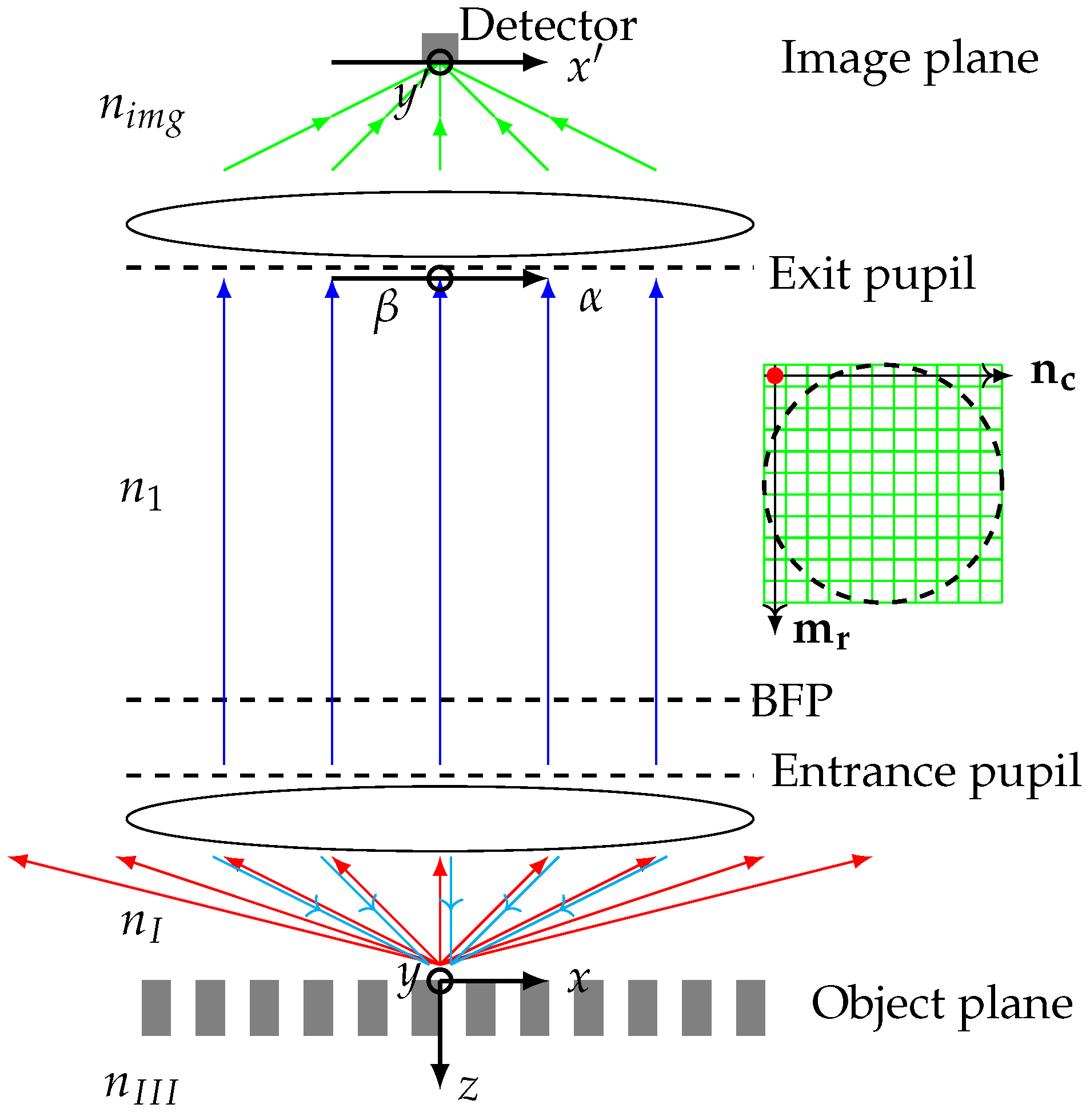
- In the simulation, we define the light properties in a grid within the back focal plane. Each cell in the grid has an amplitude vector and a propagation vector. The amplitude vector is in the back focal plane and the propagation vector is perpendicular to the back focal plane, pointing towards the object plane. We say that the amplitude vector is -polarized if the azimuth angle is zero with respect to the Cartesian -axis in the back focal plane and -polarized if is . The periodic object structure is placed such that the periodicity is along the -polarized direction in the back focal plane.
- The light beam coordinate system defined by the light beam unit vectors for TE-amplitude, TM-amplitude, and the propagation vector is used to describe the optical propagation of the light within the microscope. Please note that - and - polarization refers to a Cartesian coordinate system in this study, whereas TE and TM polarization is defined with respect to the coordinate system of a certain light beam.
- The response from the object structure is calculated using one of the three digital-twin scattering methods for a range of vertical distances between the microscope objective and the object, as well as for a range of lateral positions along the periodicity direction. Importantly, the simulations can be done for different lateral positions and vertical distances without repeating the time-consuming rigorous calculations of the light–matter interaction.
- All the scattered light, for a given vertical and lateral position, that enters the same cell in the back focal plane grid is added coherently. At this point, the presented models differ in that the fields are added either in the back focal plane, as is the case of FMM, or in the image plane, as done in FEM and BEM. This discrepancy is caused by different working principles considered initially in the implementations. This, however, should not give rise to any deviations in the observables.
- The 2D image formation is made by focusing the simulated far-field angular scattering in the back focal plane for a given vertical position onto the image plane. Each back focal image gives a point in the image plane; see Figure 1.
- The 3D image stack is obtained by performing 2D image formations for all vertical positions and stacking the 2D images, as depicted in Figure 1a,b.
- This process of profile extraction from a 3D image stack is given in two steps. First, we use the 2D nature of the grating object to reduce the 3D image stack to a 2D image stack, see Figure 1c. The vertical positions (z) are given on the vertical axis, and the lateral position (x) is on the horizontal axis. The colors show the signal intensity. For each lateral position, the optical profile is obtained by the vertical position, for which the intensity is maximal; see Figure 1d.
4. Introduction to the Scattering and Imaging Models
4.1. FMM Method
4.1.1. Scattered Field for Focused Light
4.1.2. Propagation of Scattered Fields from the Object Plane to the Exit Pupil Plane
Symmetry Consideration
Lateral Scanning of Focus Position
Vertical Scanning of Focus Position
4.1.3. Propagation of the Fields from the Exit Pupil Plane to the Image Plane
4.2. FEM Method
4.3. BEM Method
5. Results and Discussion
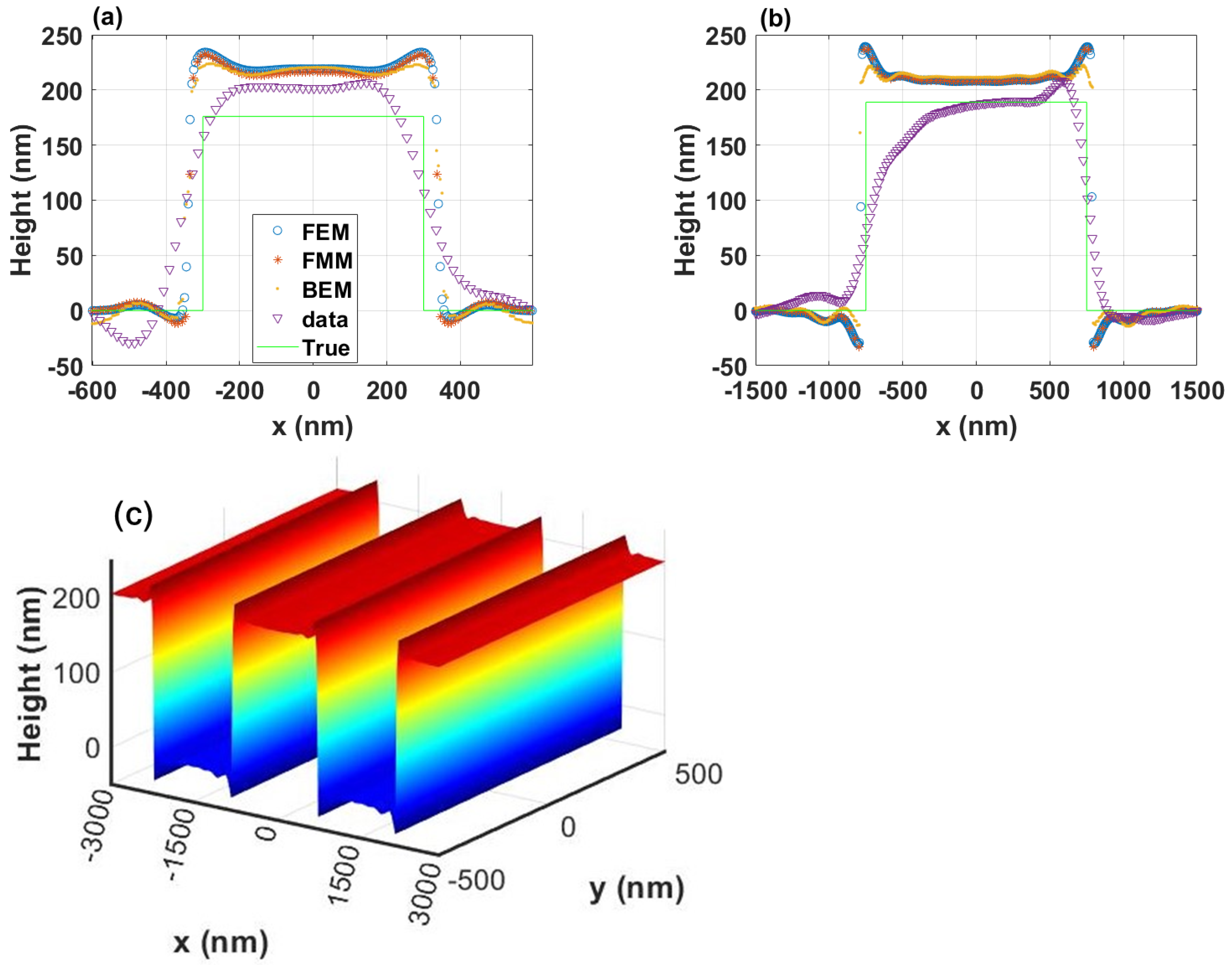
5.1. Near-Field Comparison
5.2. Confocal Imaging
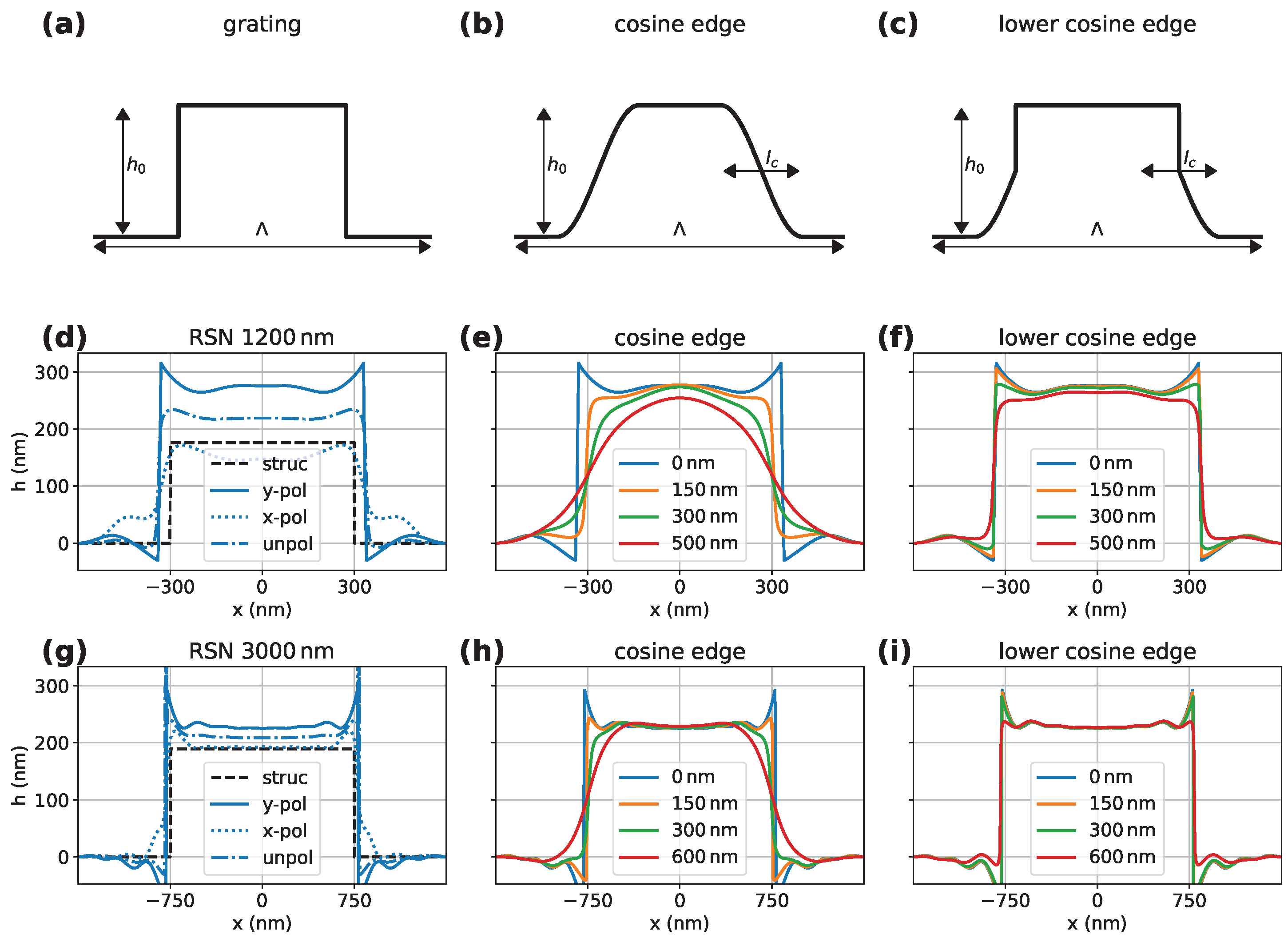
5.2.1. Influence of Corner Roundings on Optical Profile
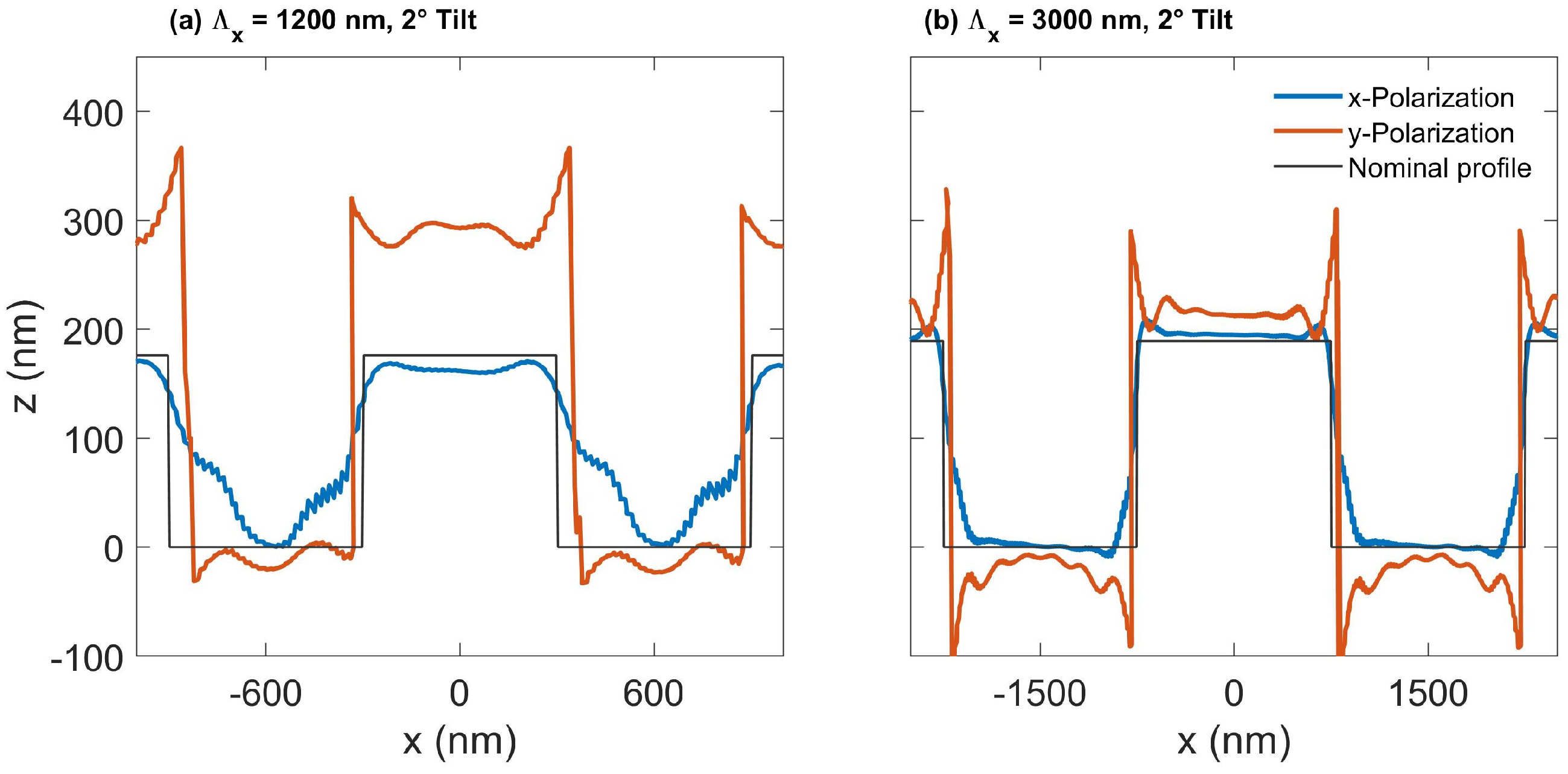
5.2.2. Influence of Sample Tilt on Optical Profile
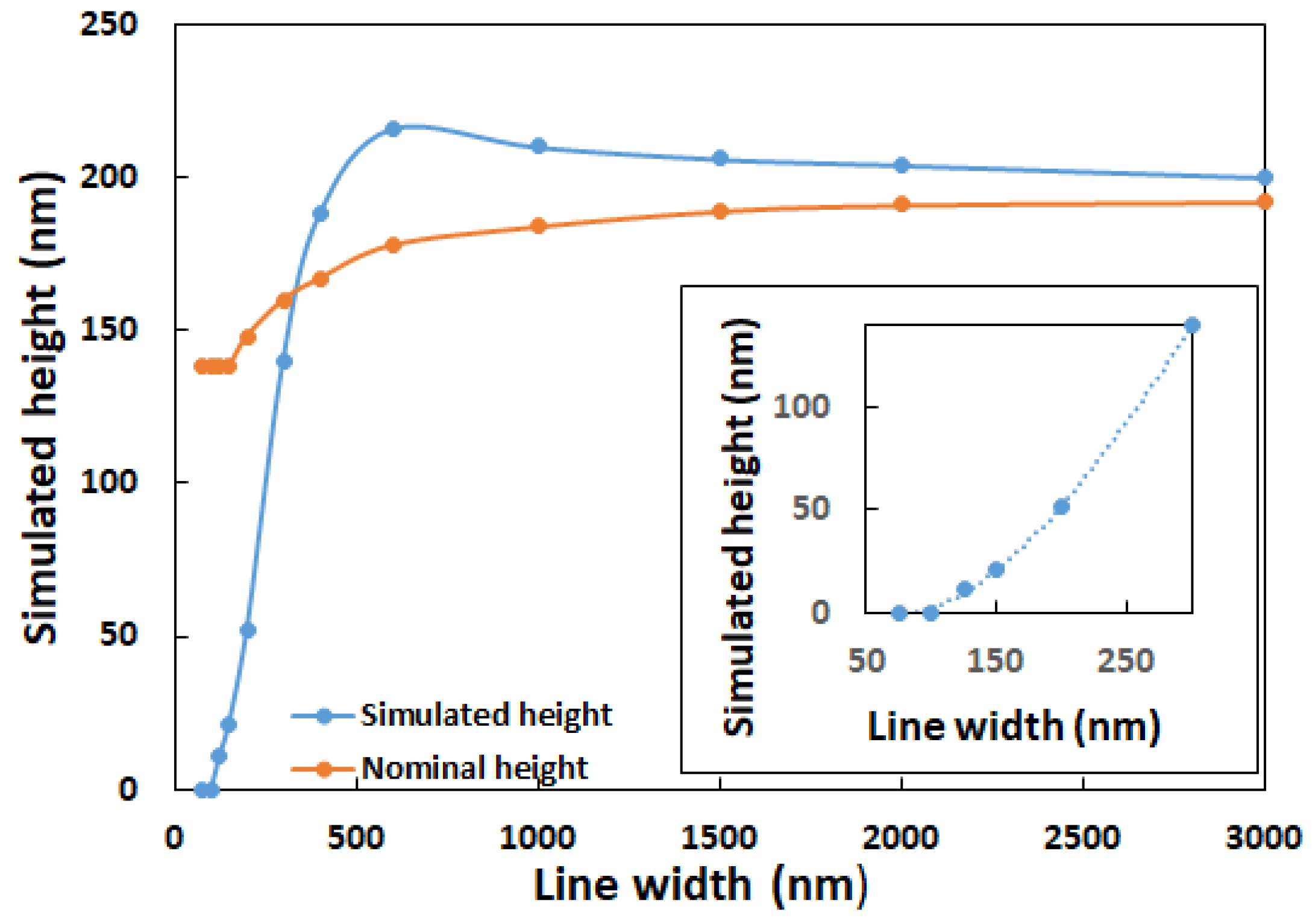
5.3. Expected Optical Heights for a Range of Gratings
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AFM | Atomic force microscopy |
| BEM | Boundary element method |
| BFP | Back focal plane |
| CSI | Coherence scanning interferometry |
| FDTD | Finite difference time domain |
| FEM | Finite element method |
| FMM | Fourier modal method |
| ITF | Instrument transfer function |
| LED | Light-emitting diode |
| NA | Numerical aperture |
| OM | Optical microscopy |
| RCWA | Rigorous coupled-wave analysis |
| SEM | Scanning electron microscopy |
| TE | Transverse electric |
| TM | Transverse magnetic |
| 2D | Two-dimensional |
| 3D | Three-dimensional |
References
- Pawley, J. Handbook of Biological Confocal Microscopy, 3rd ed.; Springer Science + Business Media, LLC: New York, NY, USA, 2007; ISBN 10: 0-387-25921-X; ISBN 13: 987-0387-25921-5. [Google Scholar] [CrossRef]
- Claxton, N.S.; Fellers, T.J.; Davidson, M.W. Microscopy, Confocal; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2006. [Google Scholar] [CrossRef]
- Paddock, S. Principles and practices of laser scanning confocal microscopy. Mol. Biotechnol. 2000, 16, 127–149. [Google Scholar] [CrossRef] [PubMed]
- Webb, R.H. Confocal optical microscopy. Rep. Prog. Phys. 1996, 59, 427. [Google Scholar] [CrossRef]
- Totzeck, M. Numerical simulation of high-NA quantitative polarization microscopy and corresponding near-fields. Optik 2001, 112, 399–406. [Google Scholar]
- Singer, W.; Totzeck, M.; Gross, H. Handbook of Optical Systems, Volume 2: Physical Image Formation; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Török, P.; Munro, P.; Kriezis, E.E. High numerical aperture vectorial imaging in coherent optical microscopes. Optics Express 2008, 16, 507–523. [Google Scholar] [CrossRef]
- Pahl, T.; Hagemeier, S.; Bischoff, J.; Manske, E.; Lehmann, P. Rigorous 3D modeling of confocal microscopy on 2D surface topographies. Meas. Sci. Technol. 2021, 32, 094010. [Google Scholar] [CrossRef]
- Hansen, P.E.; Pahl, T.; Fu, L.; Rømer, A.T.; Rosenthal, F.; Siaudinyte, L.; Reichelt, S.; Lehmann, P.; Karamehmedović, M. Digit Twins 3D Confocal Microscopy. In Optics and Photonics for Advanced Dimensional Metrology III; SPIE: Bellingham, WC, USA, 2024; Volume 12997, p. 129970M. [Google Scholar] [CrossRef]
- Simetrics. Available online: http://www.simetrics.de/pdf/RS-N.pdf (accessed on 29 December 2012).
- Siaudinyte, L.; Hansen, P.E.; Koops, R.; Xu, J.; Peiner, E. Hybrid metrology for nanometric energy harvesting devices. Meas. Sci. Technol. 2023, 34, 094008. [Google Scholar] [CrossRef]
- Eifler, M.; Brodmann, B.; Hansen, P.E.; Seewig, J. Traceable functional characterization of surface topography with angular-resolved scattering light measurement. Surf. Topogr. Metrol. Prop. 2021, 9, 035042. [Google Scholar] [CrossRef]
- Hansen, P.-E.; Siaudinyte, L. A virtual microscope for simulation of Nanostructures. EPJ Web Conf. 2022, 266, 10004. [Google Scholar] [CrossRef]
- Novotny, L.; Hecht, B. Principles of Nano-Optics, 2nd ed.; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Artigas, R. Imaging confocal microscopy. In Optical Measurement of Surface Topography; Leach, R., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 237–286. [Google Scholar]
- Hooshmand, H.; Pahl, T.; Hansen, P.E.; Fu, L.; Birk, A.; Karamehmedović, M.; Lehmann, P.; Reichelt, S.; Leach, R.; Piano, S. Comparison of rigorous scattering models to accurately replicate the behaviour of scattered electromagnetic waves. J. Comput. Phys. 2024, 521, 113519. [Google Scholar] [CrossRef]
- Bao, G.; Cowsar, L.; Masters, W. Mathematical Modeling in Optical Science; SIAM: Philadelphia, PA, USA, 2001. [Google Scholar]
- Madsen, M.H.; Hansen, P.E. Scatterometry—Fast and robust measurements of nano-textured surfaces. Surf. Topogr. Metrol. Prop. 2016, 4, 023003–023028. [Google Scholar] [CrossRef]
- Gawhary, O.E.; Kumar, N.; Pereira, S.F.; Coene, W.M.J.; Urbach, H.P. Performance analysis of coherent optical scatterometry. Appl. Phys. B 2011, 105, 775–781. [Google Scholar] [CrossRef]
- Çapoğlu, İ.R.; Rogers, J.D.; Taflove, A.; Backman, V. Chapter 1—The Microscope in a Computer: Image Synthesis from Three-Dimensional Full-Vector Solutions of Maxwell’s Equations at the Nanometer Scale. In Progress in Optics; Wolf, E., Ed.; Elsevier: Amsterdam, The Netherlands, 2012; Volume 57, pp. 1–91. [Google Scholar] [CrossRef]
- Hagemeier, S.; Pahl, T.; Breidenbach, J.; Lehmann, P. A novel cubic-exp evaluation algorithm considering non-symmetrical axial response signals of confocal microscopes. Microsc. Res. Tech. 2023, 86, 1012–1022. [Google Scholar] [CrossRef] [PubMed]
- Pahl, T.; Hagemeier, S.; Künne, M.; Yang, D.; Lehmann, P. 3D modeling of coherence scanning interferometry on 2D surfaces using FEM. Opt. Express 2020, 28, 39807–39826. [Google Scholar] [CrossRef]
- Pahl, T.; Rosenthal, F.; Breidenbach, J.; Danzglock, C.; Hagemeier, S.; Xu, X.; Künne, M.; Lehmann, P. Electromagnetic modeling of interference, confocal, and focus variation microscopy. Adv. Photonics Nexus 2024, 3, 016013. [Google Scholar] [CrossRef]
- Fu, L.; Daiber-Hupper, M.; Frenner, K.; Osten, W. Simulation of realistic speckle fields by using surface integral equation and multi-level fast multipole method. Opt. Lasers Eng. 2023, 162, 107438. [Google Scholar] [CrossRef]
- Dziomba, T. (PTB, Braunschweig, Germany). Personal Communication, 2024.
- Durgin, G.D. The practical behavior of various edge-diffraction formulas. IEEE Antennas Propag. Mag. 2009, 51, 24–35. [Google Scholar] [CrossRef]
- de Groot, P. Principles of interference microscopy for the measurement of surface topography. Adv. Opt. Photon. 2015, 7, 1–65. [Google Scholar] [CrossRef]
- de Groot, P.J. The instrument transfer function for optical measurements of surface topography. J. Phys. Photonics 2021, 3, 024004. [Google Scholar] [CrossRef]
- de Groot, P.J.; Daouda, Z.; Deck, L.L.; de Lega, X.C. Linear systems characterization of the topographical spatial resolution of optical instruments. Appl. Opt. 2024, 63, 4201–4210. [Google Scholar] [CrossRef]
- Sheppard, C.J.R.; Connolly, T.; Gu, M. Imaging and Reconstruction for Rough Surface Scattering in the Kirchhoff Approximation by Confocal Microscopy. J. Mod. Opt. 1993, 40, 2407–2421. [Google Scholar] [CrossRef]
- Sheppard, C.J.R.; Gu, M. The significance of 3-D transfer functions in confocal scanning microscopy. J. Microsc. 1992, 165, 377–390. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hansen, P.-E.; Pahl, T.; Fu, L.; Nielsen, I.; Rosenthal, F.; Reichelt, S.; Lehmann, P.; Rømer, A.T. Digital Twins for 3D Confocal Microscopy: Near-Field, Far-Field, and Comparison with Experiments. Sensors 2025, 25, 2001. https://doi.org/10.3390/s25072001
Hansen P-E, Pahl T, Fu L, Nielsen I, Rosenthal F, Reichelt S, Lehmann P, Rømer AT. Digital Twins for 3D Confocal Microscopy: Near-Field, Far-Field, and Comparison with Experiments. Sensors. 2025; 25(7):2001. https://doi.org/10.3390/s25072001
Chicago/Turabian StyleHansen, Poul-Erik, Tobias Pahl, Liwei Fu, Ida Nielsen, Felix Rosenthal, Stephan Reichelt, Peter Lehmann, and Astrid Tranum Rømer. 2025. "Digital Twins for 3D Confocal Microscopy: Near-Field, Far-Field, and Comparison with Experiments" Sensors 25, no. 7: 2001. https://doi.org/10.3390/s25072001
APA StyleHansen, P.-E., Pahl, T., Fu, L., Nielsen, I., Rosenthal, F., Reichelt, S., Lehmann, P., & Rømer, A. T. (2025). Digital Twins for 3D Confocal Microscopy: Near-Field, Far-Field, and Comparison with Experiments. Sensors, 25(7), 2001. https://doi.org/10.3390/s25072001