
Redundancy-Based Motion Planning with Task Constraints for Robot Manipulators


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
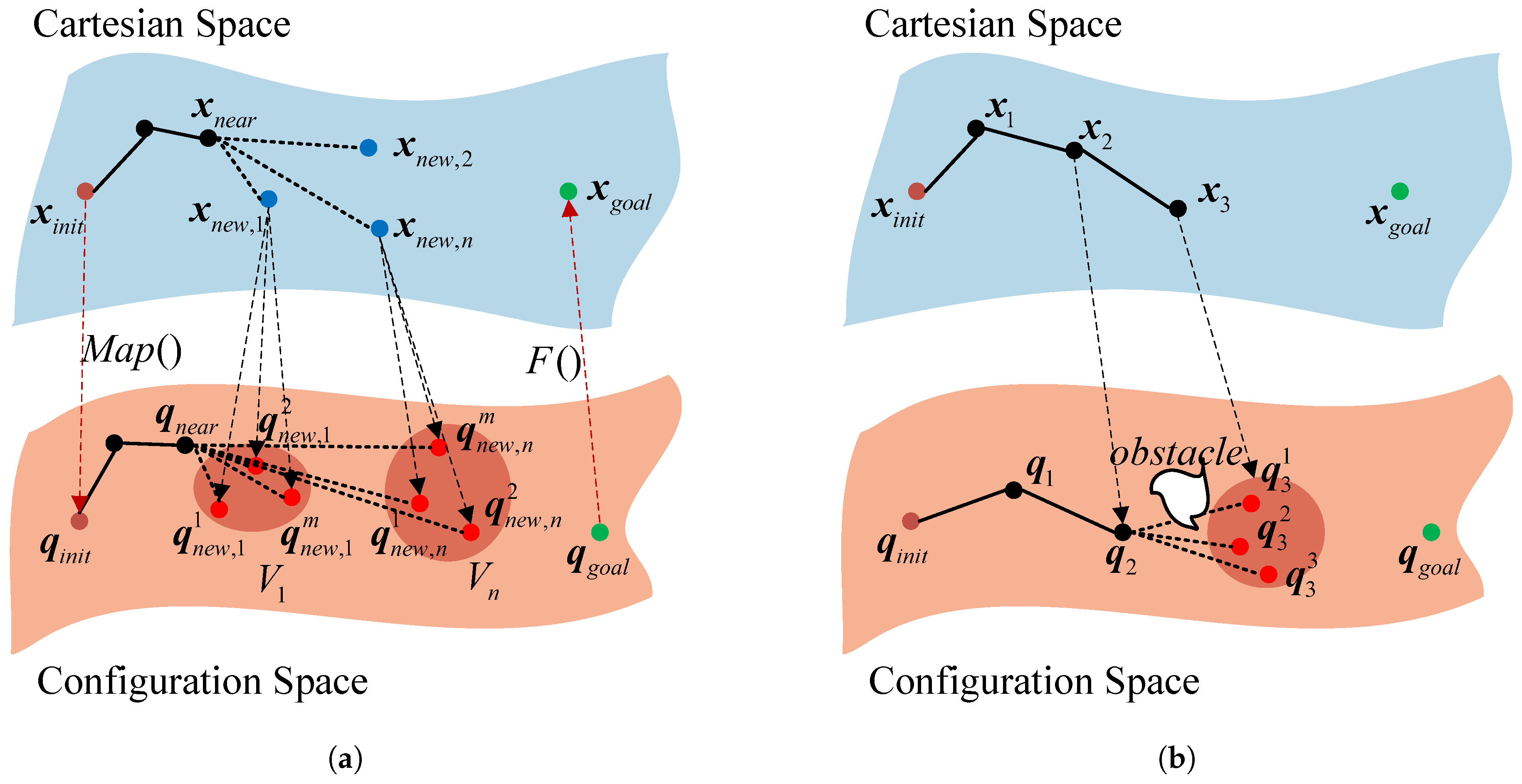
- Samples in Cartesian space are used to calculate configurations that match constraints directly, and the sampling dimension decreases as the number of task restrictions increases. The robot manipulator kinematics are integrated with motion planning.
- Analytical inverse kinematics derive joint configurations that match constraints, reducing the iteration time of typical iterative approaches.
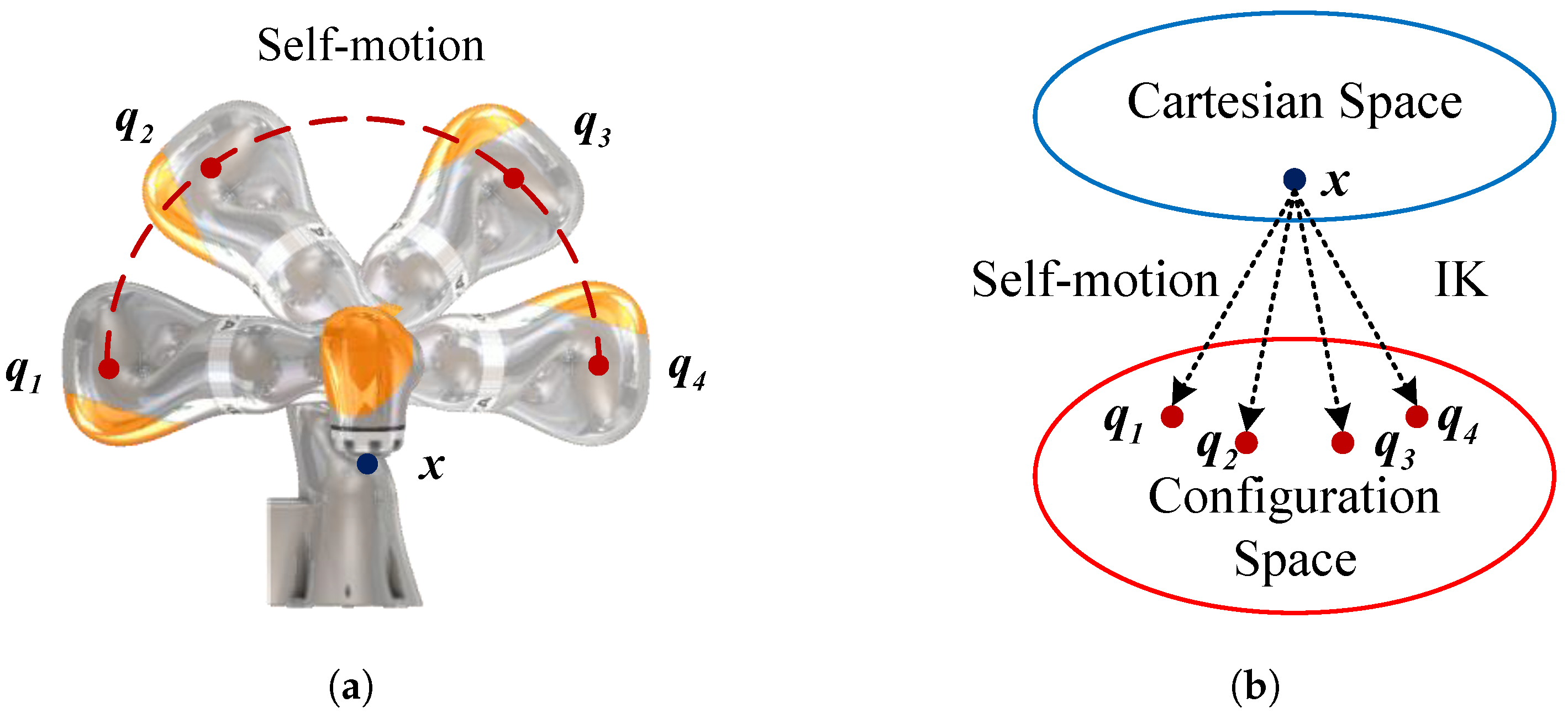
- Redundant inverse kinematic self-motion generates many feasible joint position nodes, avoiding joint constraints and singularities and improving sampling points and graph connections.
2. Preliminaries
2.1. Constraint Expression
2.2. Redundant Inverse Kinematics
- Seven joint variables in the 7-DOF redundant manipulator correspond to six spatial variables in Cartesian space. Therefore, is selected as the redundant variable. The connection of the shoulder, elbow, and wrist points creates a triangle .
- At the same position, the triangle is symmetric about the line .The robot manipulator has two equivalent states of elbow down and elbow up, and the following equation calculates the two sets of elbow joint angles .where.
- For each elbow angle , there are two equivalent states of wrist angle : not flipped and flipped.where .
- For each elbow–wrist combination, there are two possibilities for pairs; right- and left-handed kinematic configurations.
- A singularity occurs when (pointing upward). The atan2 function fails because and may be zero simultaneously. In this state, joints 1 and 3 are coaxial, and there are infinite solutions for and . Joints 1 and 3 can rotate freely about the z-axis independently of the other joints. A default value for must be predefined, typically set to the value of the previously feasible position. The solutions for joint angles and can be obtained using the values , , , and obtained earlier.S is the projection of on the plane.
3. Proposed Algorithm
| Algorithm 1: Map |
 |
| Algorithm 2: RBRRT |
 |
4. Experimental Results
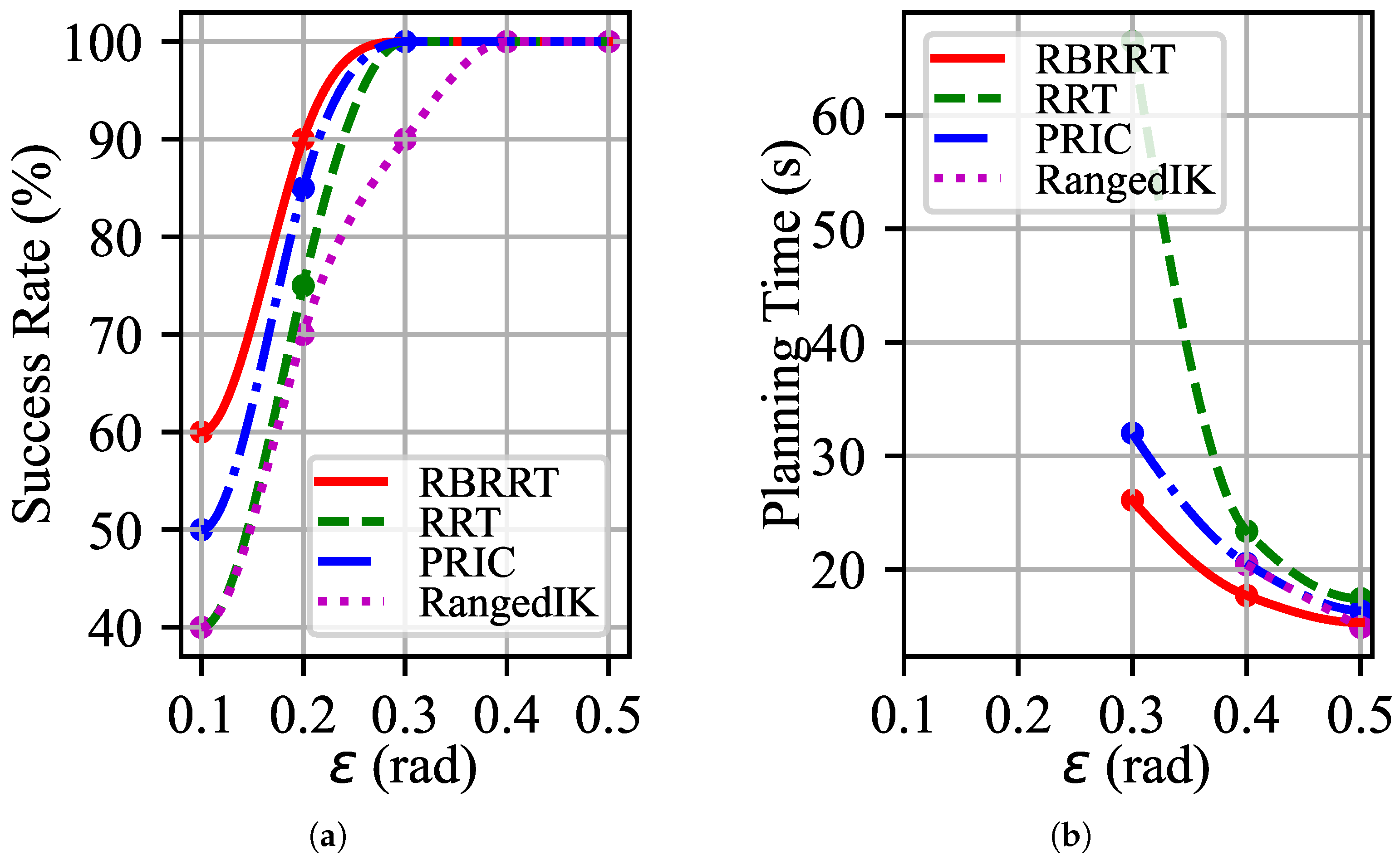
4.1. Comparison with Existing Methods
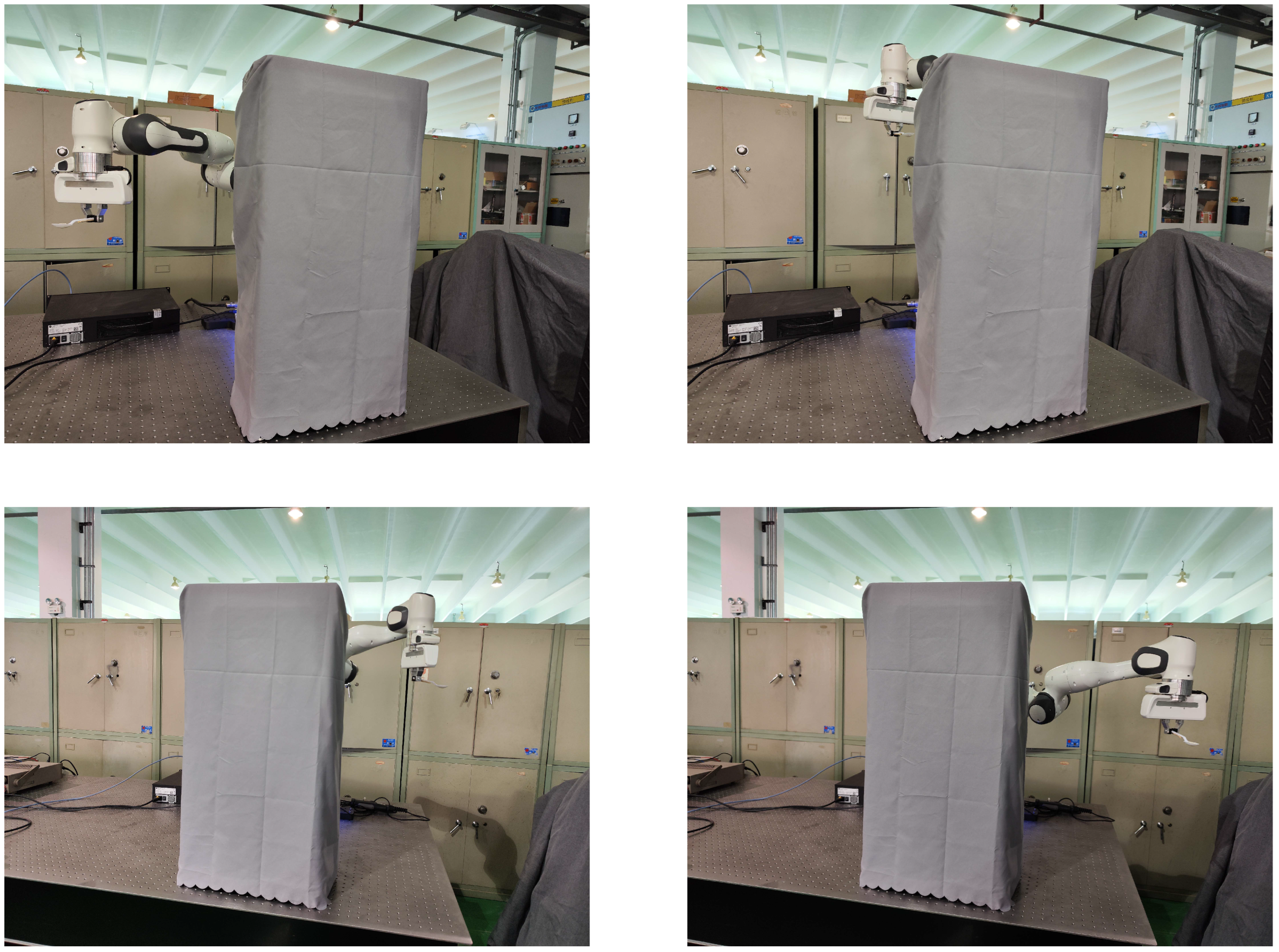
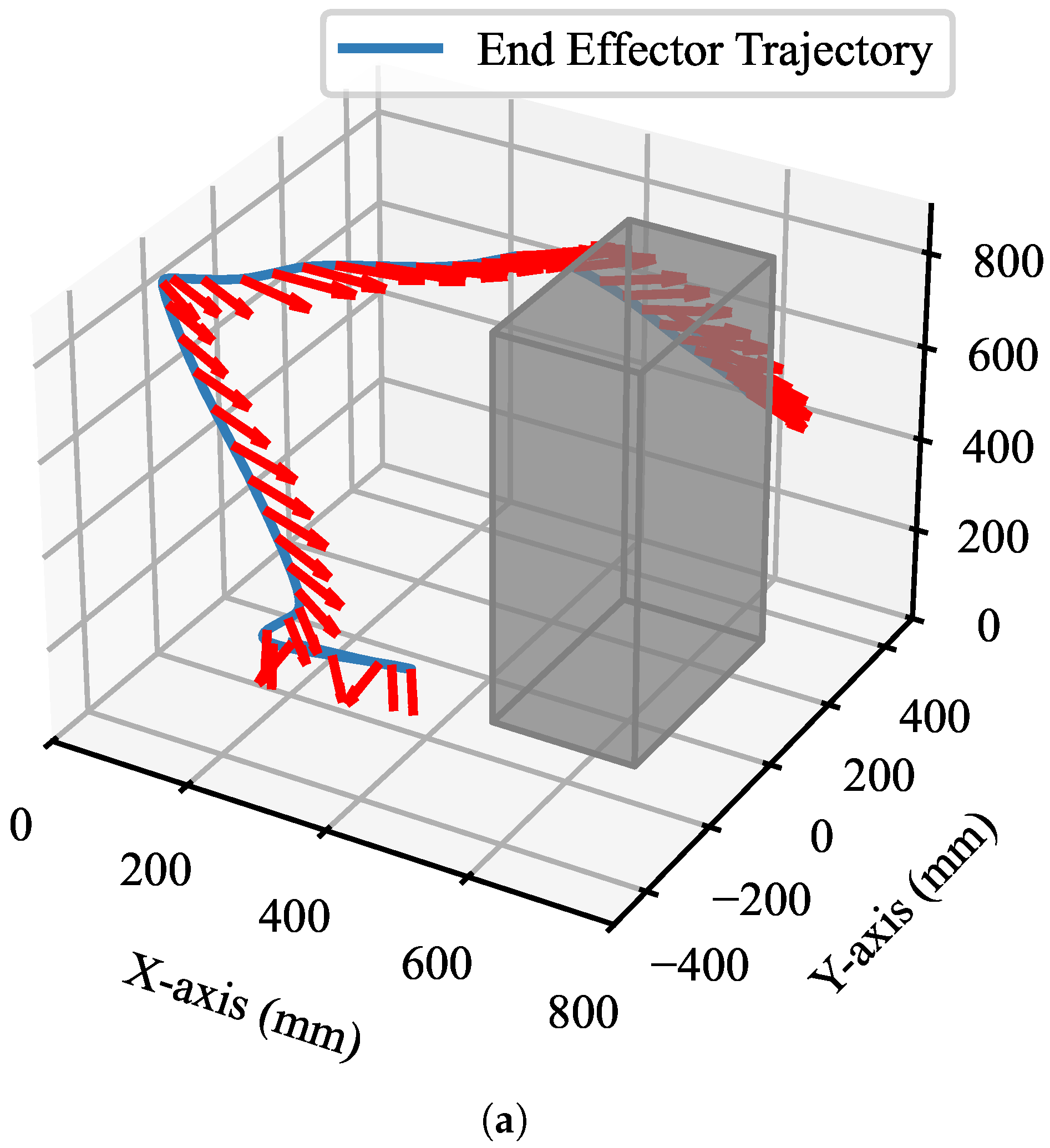
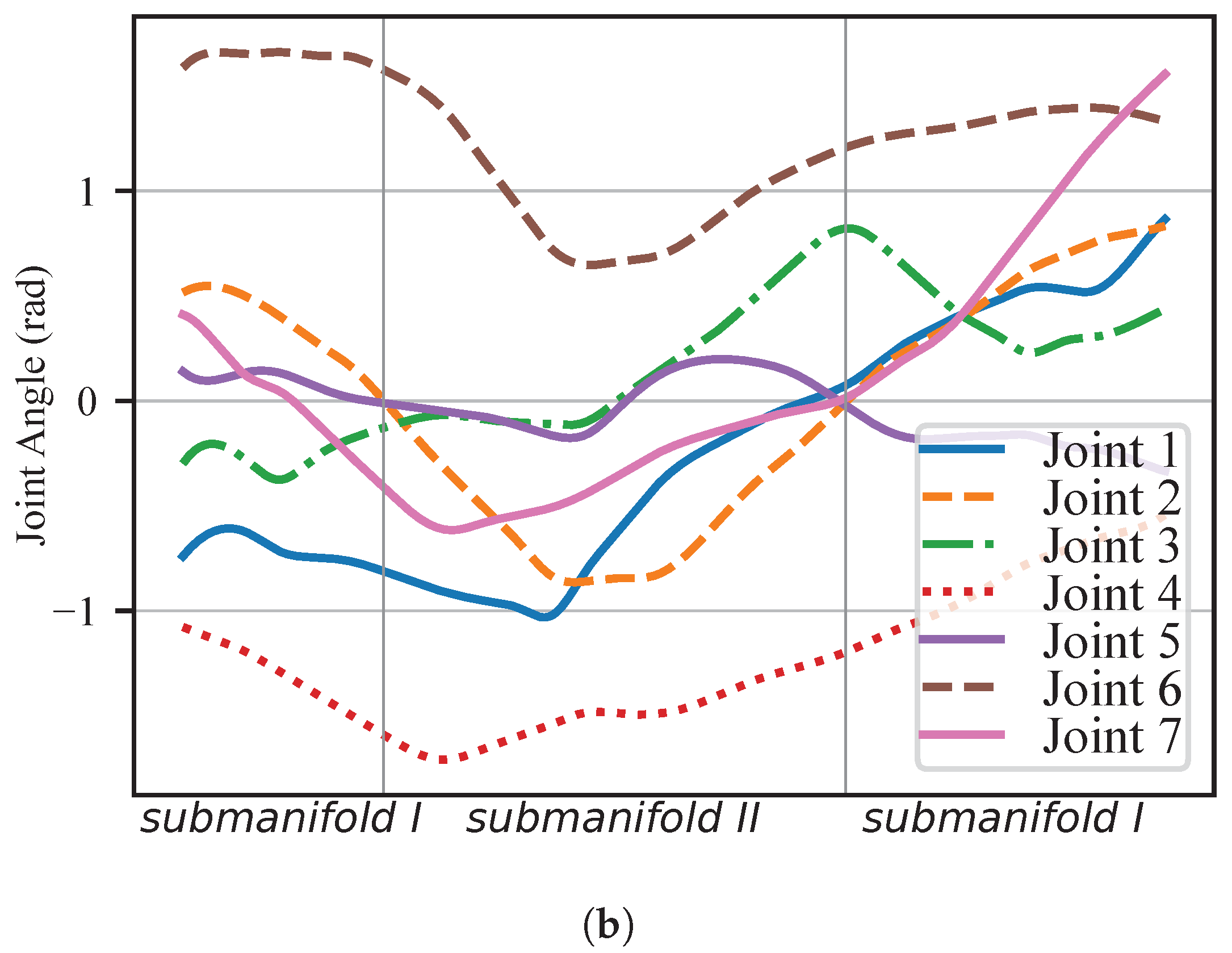
4.2. Transition Experiments Between Submanifolds
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shimizu, M.; Kakuya, H.; Yoon, W.K.; Kitagaki, K.; Kosuge, K. Analytical Inverse Kinematic Computation for 7-DOF Redundant Manipulators with Joint Limits and Its Application to Redundancy Resolution. IEEE Trans. Robot. 2008, 24, 1131–1142. [Google Scholar] [CrossRef]
- Sinha, A.; Chakraborty, N. Geometric Search-Based Inverse Kinematics of 7-DoF Redundant Manipulator with Multiple Joint Offsets. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5592–5598. [Google Scholar] [CrossRef]
- Asfour, T.; Dillmann, R. Human-like Motion of a Humanoid Robot Arm Based on a Closed-form Solution of the Inverse Kinematics Problem. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 2, pp. 1407–1412. [Google Scholar] [CrossRef]
- Kingston, Z.; Moll, M.; Kavraki, L.E. Sampling-Based Methods for Motion Planning with Constraints. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 159–185. [Google Scholar] [CrossRef]
- Canny, J. The Complexity of Robot Motion Planning; MIT Press: Cambridge, MA, USA, 1988. [Google Scholar]
- Englert, P.; Rayas Fernández, I.; Ramachandran, R.; Sukhatme, G. Sampling-Based Motion Planning on Sequenced Manifolds. In Proceedings of the Robotics: Science and Systems XVII, Virtually, 12–16 July 2021; RSS Foundation: Somerville, MA, USA, 2021. [Google Scholar] [CrossRef]
- Power, T.; Berenson, D. Constrained Stein Variational Trajectory Optimization. IEEE Trans. Robot. 2024, 40, 3602–3619. [Google Scholar] [CrossRef]
- Zhong, H.; Liang, J.; Chen, Y.; Zhang, H.; Mao, J.; Wang, Y. Prototype, Modeling, and Control of Aerial Robots with Physical Interaction: A Review. IEEE Trans. Autom. Sci. Eng. 2025, 22, 3528–3542. [Google Scholar] [CrossRef]
- Bialkowski, J.; Otte, M.; Frazzoli, E. Free-Configuration Biased Sampling for Motion Planning. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1272–1279. [Google Scholar] [CrossRef]
- Cefalo, M.; Ferrari, P.; Oriolo, G. An Opportunistic Strategy for Motion Planning in the Presence of Soft Task Constraints. IEEE Robot. Autom. Lett. 2020, 5, 6294–6301. [Google Scholar] [CrossRef]
- Berenson, D.; Srinivasa, S.S.; Ferguson, D.; Kuffner, J.J. Manipulation Planning on Constraint Manifolds. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 625–632. [Google Scholar] [CrossRef]
- Berenson, D. Constrained Manipulation Planning; Carnegie Mellon University: Pittsburgh, PA, USA, 2011. [Google Scholar]
- Baker, W.; Kingston, Z.; Moll, M.; Badger, J.; Kavraki, L.E. Robonaut 2 and You: Specifying and Executing Complex Operations. In Proceedings of the 2017 IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO), Austin, TX, USA, 8–10 March 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Cohen, B.; Chitta, S.; Likhachev, M. Search-Based Planning for Dual-Arm Manipulation with Upright Orientation Constraints. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 3784–3790. [Google Scholar] [CrossRef]
- Yakey, J.; LaValle, S.; Kavraki, L. Randomized Path Planning for Linkages with Closed Kinematic Chains. IEEE Trans. Robot. Autom. 2001, 17, 951–958. [Google Scholar] [CrossRef]
- Henderson, M.E. Multiple Parameter Continuation: Computing Implicitly Defined k-Manifolds. Int. J. Bifurc. Chaos 2002, 12, 451–476. [Google Scholar] [CrossRef]
- Kim, B.; Um, T.T.; Suh, C.; Park, F.C. Tangent Bundle RRT: A Randomized Algorithm for Constrained Motion Planning. Robotica 2016, 34, 202–225. [Google Scholar] [CrossRef]
- Voss, C.; Moll, M.; Kavraki, L.E. Atlas + X: Sampling-based Planners on Constraint Manifolds; Technical Report; Rice University: Houston, TX, USA, 2017. [Google Scholar]
- Xia, J.; Jiang, Z.; Zhang, H.; Zhu, R.; Tian, H. Dual Fast Marching Tree Algorithm for Human-Like Motion Planning of Anthropomorphic Arms with Task Constraints. IEEE/ASME Trans. Mechatronics 2021, 26, 2803–2813. [Google Scholar] [CrossRef]
- Wang, J.; Liu, S.; Zhang, B.; Lu, Q. Motion Planning with Pose Constraints Based on Direct Projection for Anthropomorphic Manipulators. IEEE Access 2020, 8, 32518–32530. [Google Scholar] [CrossRef]
- Jang, K.; Baek, J.; Park, S.; Park, J. Motion Planning for Closed-Chain Constraints Based on Probabilistic Roadmap with Improved Connectivity. IEEE/ASME Trans. Mechatronics 2022, 27, 2035–2043. [Google Scholar] [CrossRef]
- Zhao, Z.; Cheng, S.; Ding, Y.; Zhou, Z.; Zhang, S.; Xu, D.; Zhao, Y. A Survey of Optimization-Based Task and Motion Planning: From Classical to Learning Approaches. IEEE/ASME Trans. Mechatronics 2024, 1–27. [Google Scholar] [CrossRef]
- Garrett, C.R.; Lozano-Pérez, T.; Kaelbling, L.P. PDDLStream: Integrating Symbolic Planners and Blackbox Samplers via Optimistic Adaptive Planning. Proc. Int. Conf. Autom. Plan. Sched. 2020, 30, 440–448. [Google Scholar] [CrossRef]
- Wensing, P.M.; Posa, M.; Hu, Y.; Escande, A.; Mansard, N.; Prete, A.D. Optimization-Based Control for Dynamic Legged Robots. IEEE Trans. Robot. 2024, 40, 43–63. [Google Scholar] [CrossRef]
- Janner, M.; Li, Q.; Levine, S. Offline Reinforcement Learning as One Big Sequence Modeling Problem. Adv. Neural Inf. Process. Syst. 2021, 34, 1273–1286. [Google Scholar]
- Sharma, P.; Sundaralingam, B.; Blukis, V.; Paxton, C.; Hermans, T.; Torralba, A.; Andreas, J.; Fox, D. Correcting Robot Plans with Natural Language Feedback. arXiv 2022, arXiv:2204.05186. [Google Scholar] [CrossRef]
- Ye, L.; Wu, F.; Zou, X.; Li, J. Path Planning for Mobile Robots in Unstructured Orchard Environments: An Improved Kinematically Constrained Bi-Directional RRT Approach. Comput. Electron. Agric. 2023, 215, 108453. [Google Scholar] [CrossRef]
- Li, X.; Hu, Y.; Jie, Y.; Zhao, C.; Zhang, Z. Dual-Frequency Lidar for Compressed Sensing 3D Imaging Based on All-Phase Fast Fourier Transform. J. Opt. Photonics Res. 2023, 1, 74–81. [Google Scholar] [CrossRef]
- Chen, M.; Chen, Z.; Luo, L.; Tang, Y.; Cheng, J.; Wei, H.; Wang, J. Dynamic Visual Servo Control Methods for Continuous Operation of a Fruit Harvesting Robot Working throughout an Orchard. Comput. Electron. Agric. 2024, 219, 108774. [Google Scholar] [CrossRef]
- Berenson, D.; Srinivasa, S.; Kuffner, J. Task Space Regions: A Framework for Pose-Constrained Manipulation Planning. Int. J. Robot. Res. 2011, 30, 1435–1460. [Google Scholar] [CrossRef]
- Stilman, M. Global Manipulation Planning in Robot Joint Space with Task Constraints. IEEE Trans. Robot. 2010, 26, 576–584. [Google Scholar] [CrossRef]
- He, Y.; Liu, S. Analytical Inverse Kinematics for Franka Emika Panda—A Geometrical Solver for 7-DOF Manipulators with Unconventional Design. In Proceedings of the 2021 9th International Conference on Control, Mechatronics and Automation (ICCMA), Belval, Luxembourg, 11–14 November 2021; pp. 194–199. [Google Scholar] [CrossRef]
- Sucan, I.A.; Moll, M.; Kavraki, L.E. The Open Motion Planning Library. IEEE Robot. Autom. Mag. 2012, 19, 72–82. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An Open-Source Robot Operating System. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1–6. [Google Scholar]
- Chitta, S.; Sucan, I.; Cousins, S. MoveIt! [ROS Topics]. IEEE Robot. Autom. Mag. 2012, 19, 18–19. [Google Scholar] [CrossRef]
- Wang, Y.; Praveena, P.; Rakita, D.; Gleicher, M. RangedIK: An Optimization-Based Robot Motion Generation Method for Ranged-Goal Tasks. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 9700–9706. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wang, H. Redundancy-Based Motion Planning with Task Constraints for Robot Manipulators. Sensors 2025, 25, 1900. https://doi.org/10.3390/s25061900
Zhang Y, Wang H. Redundancy-Based Motion Planning with Task Constraints for Robot Manipulators. Sensors. 2025; 25(6):1900. https://doi.org/10.3390/s25061900
Chicago/Turabian StyleZhang, Yi, and Hongguang Wang. 2025. "Redundancy-Based Motion Planning with Task Constraints for Robot Manipulators" Sensors 25, no. 6: 1900. https://doi.org/10.3390/s25061900
APA StyleZhang, Y., & Wang, H. (2025). Redundancy-Based Motion Planning with Task Constraints for Robot Manipulators. Sensors, 25(6), 1900. https://doi.org/10.3390/s25061900