
Flexible Optimal Control of the CFBB Combustion System Based on ESKF and MPC

Abstract
1. Introduction
- (1)
- For the first time, a method of enhancing the robustness of MPC control using the ESKF algorithm is applied to the combustion system of a circulating fluidized bed boiler with complex coupling characteristics, in order to effectively improve the overall performance of the control system during the flexible operation process. This solution helps to reduce the frequent fluctuations of the main steam pressure and the bed temperature, ensuring the efficiency of the operation process;
- (2)
- The extended state Kalman filter is used to ensure the accuracy and stability of the collected signals. This is especially true for the bed temperature signals in the high-temperature furnace during the combustion fluctuation process, providing stable and accurate signals for feedback control. Based on this control system, unnecessary frequent actions and wear of equipment can be reduced, equipment failures can be decreased, and the service life of equipment can be extended;
- (3)
- Combining the ESKF to conduct online estimation and compensation of the “external disturbances” of the system significantly reduces the dependence of the MPC control strategy on an accurate model. This improves the adaptability and eases the modeling difficulty during the implementation of the MPC strategy. It is conducive to the widespread application of its online optimization features.
- (4)
- During the continuous load-rising and load-falling process of CFB units, the combustion system adopting the ESKF-MPC control strategy exhibits faster tracking ability, better anti-disturbance performance, and enhanced robustness compared to the PI control strategy. Simulation results show that, for a 330 MW CFB unit at the rated capacity, when the load condition fluctuates by up to 50%, the controller still demonstrates reliable robust control performance.
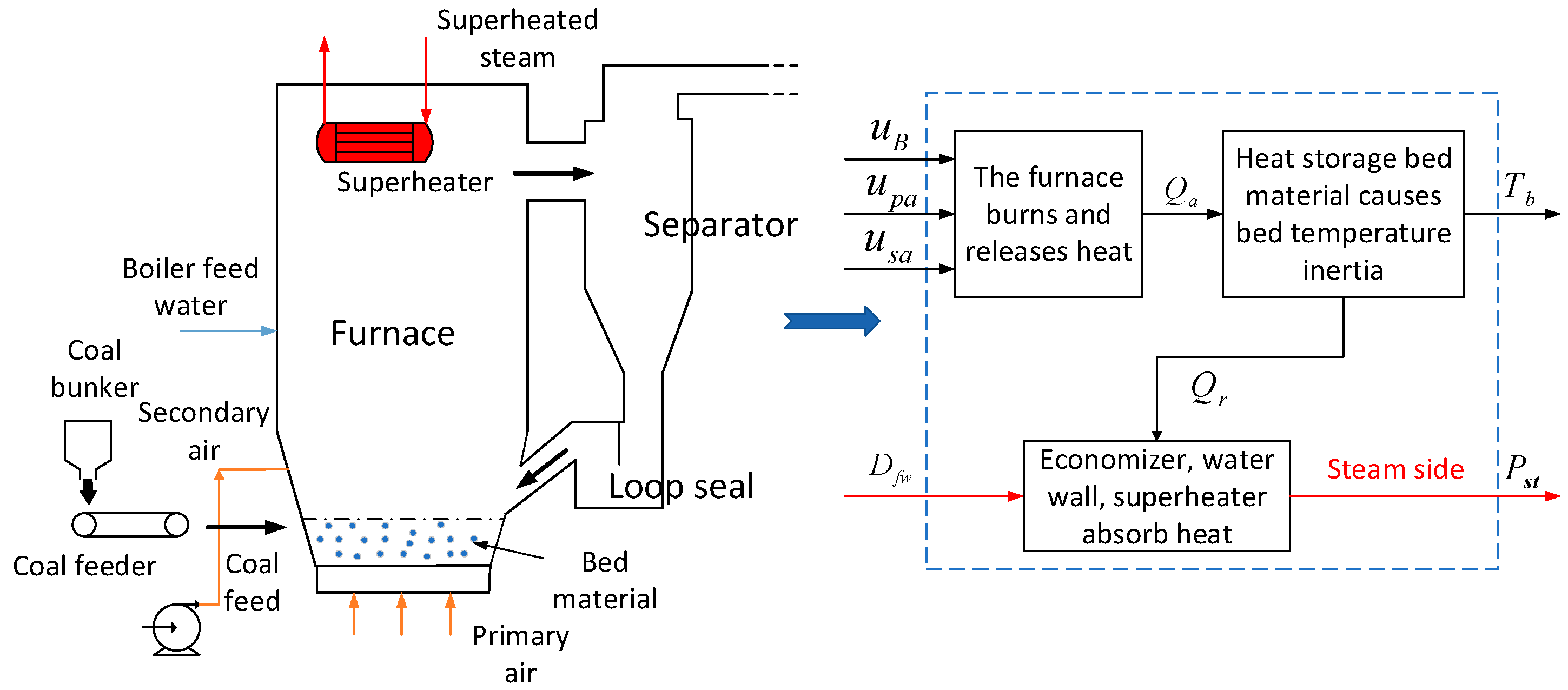
2. CFB Boiler Combustion System Description
3. Control Strategy Design
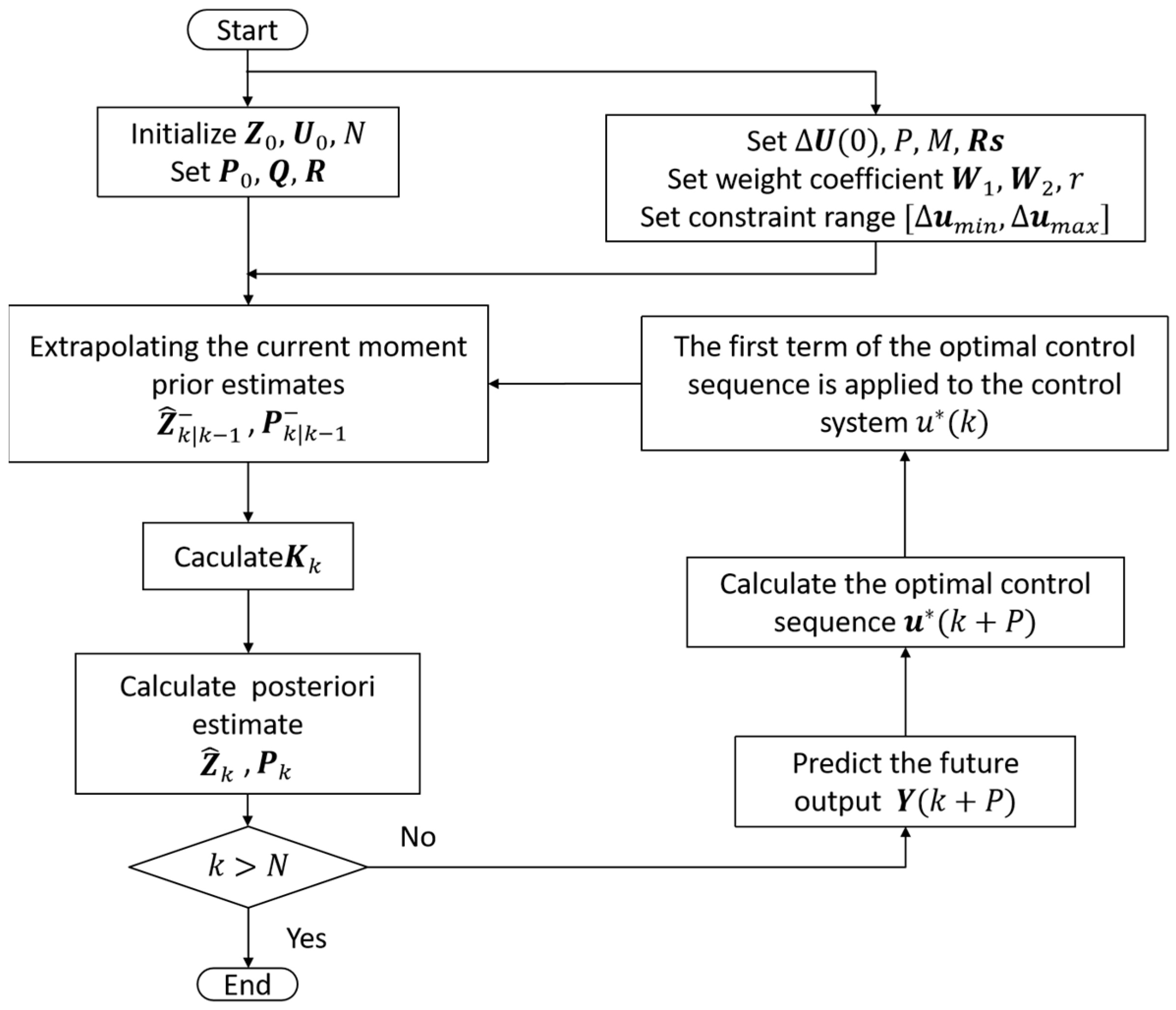
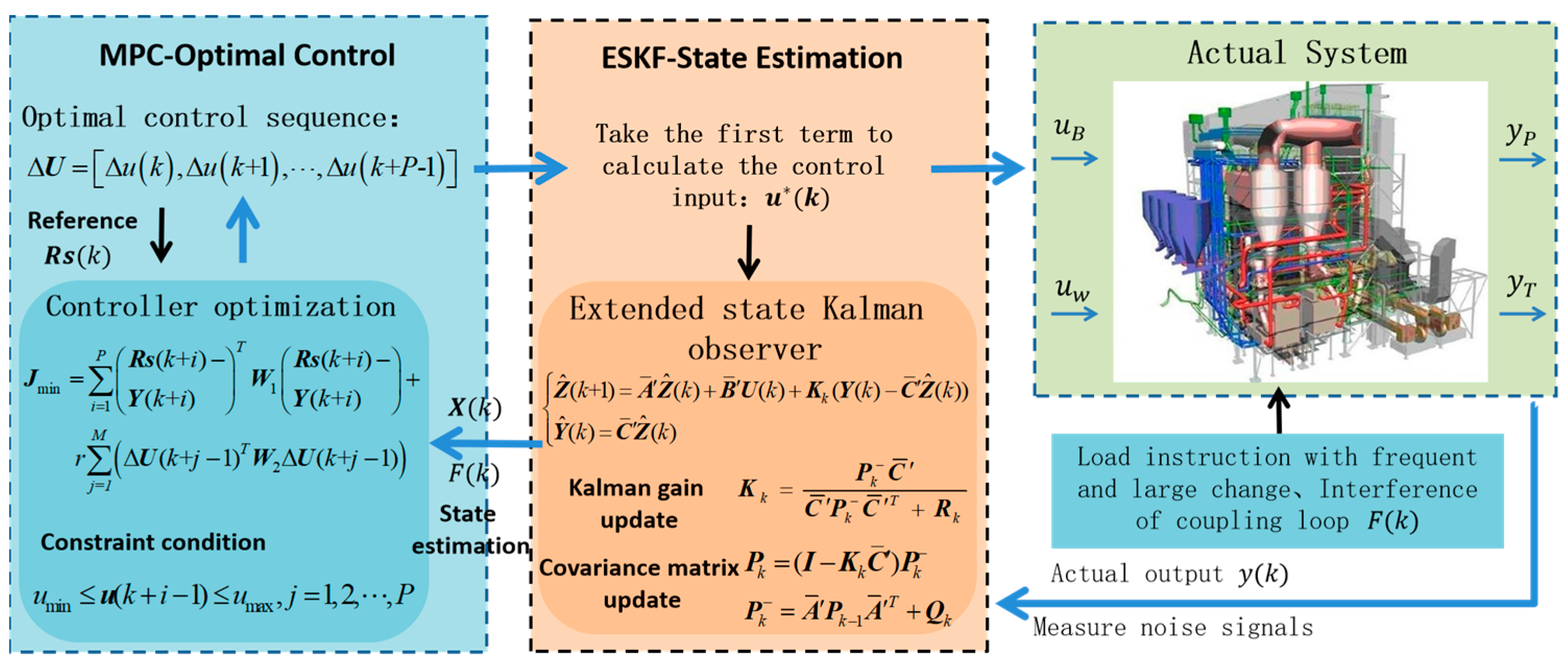
3.1. ESKF-MPC Algorithm
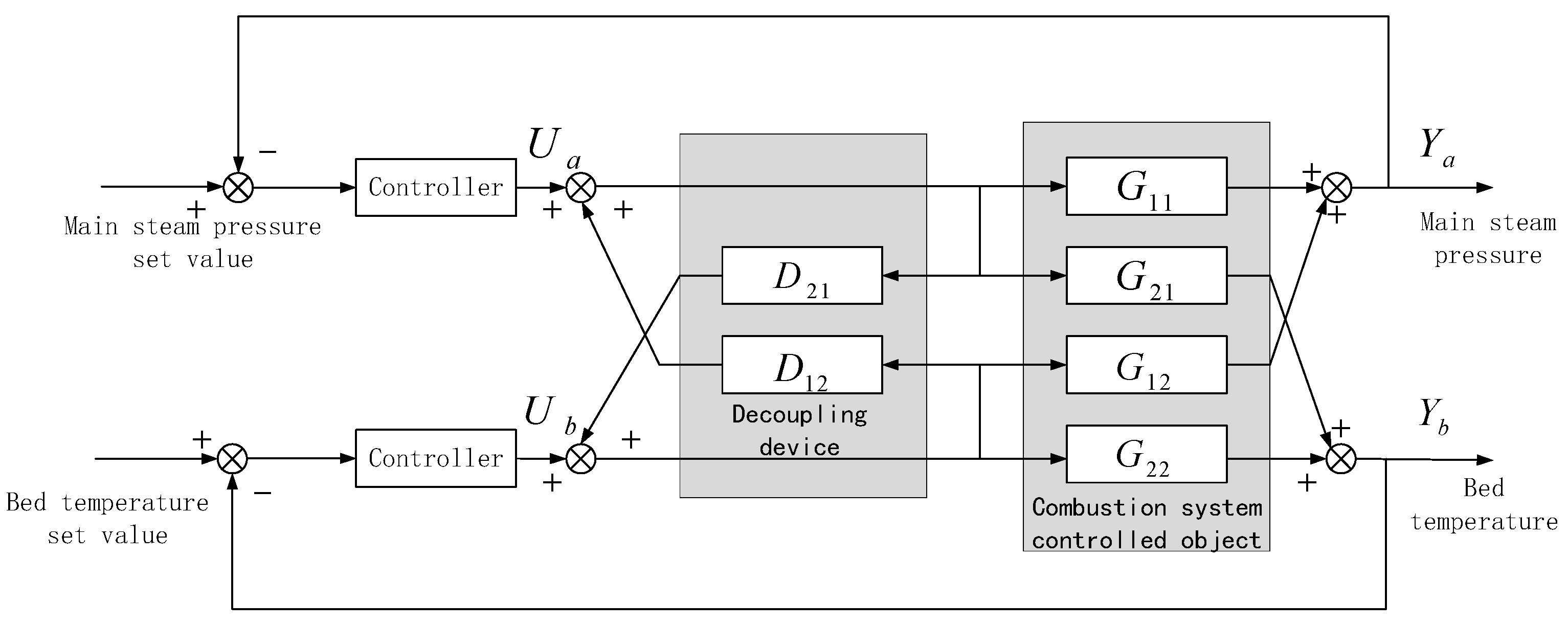
3.2. Controller Design
4. Simulation Results and Analysis
4.1. Controller Parameter Setting
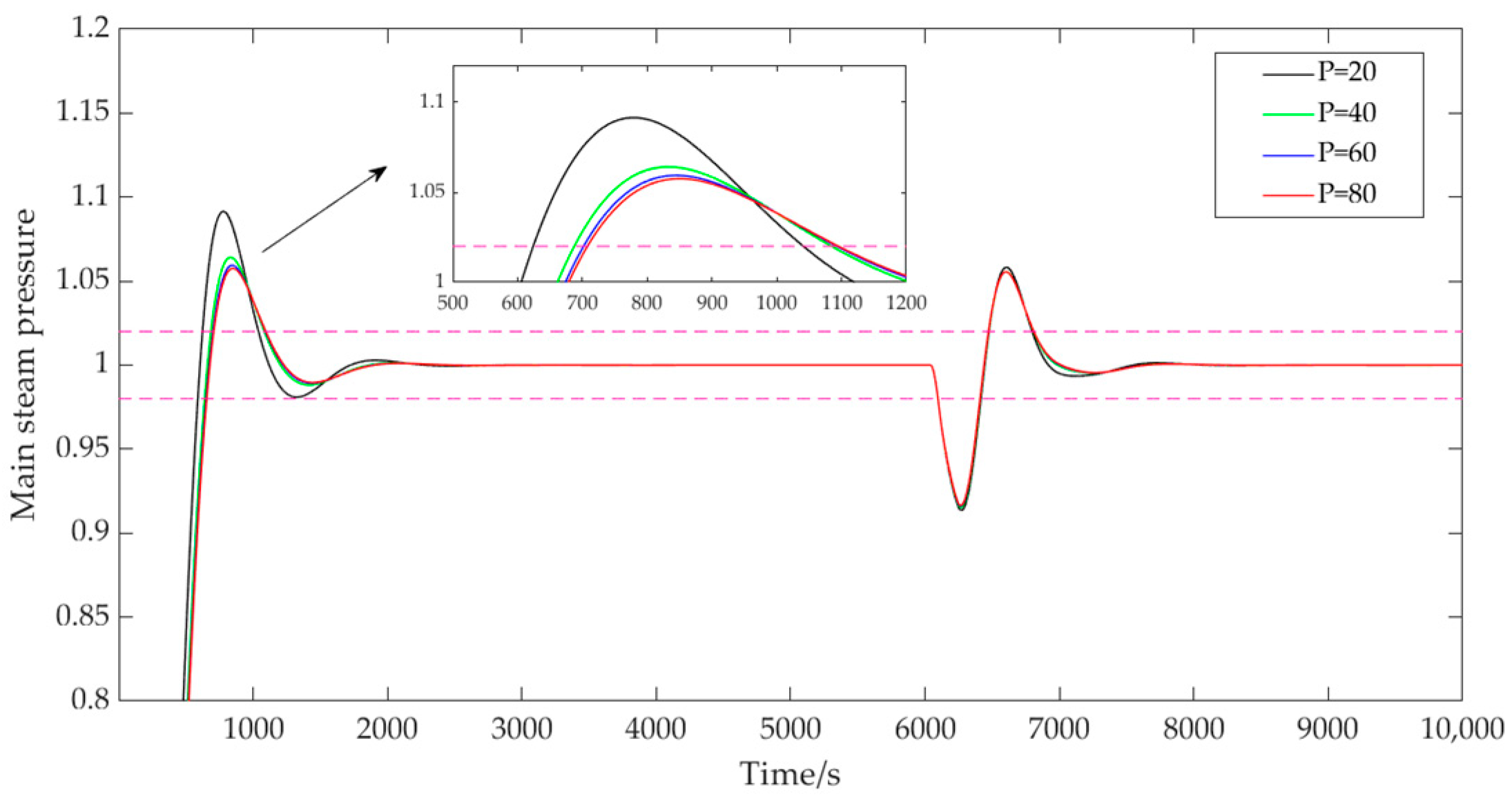
- (1)
- The influence of the prediction horizon .
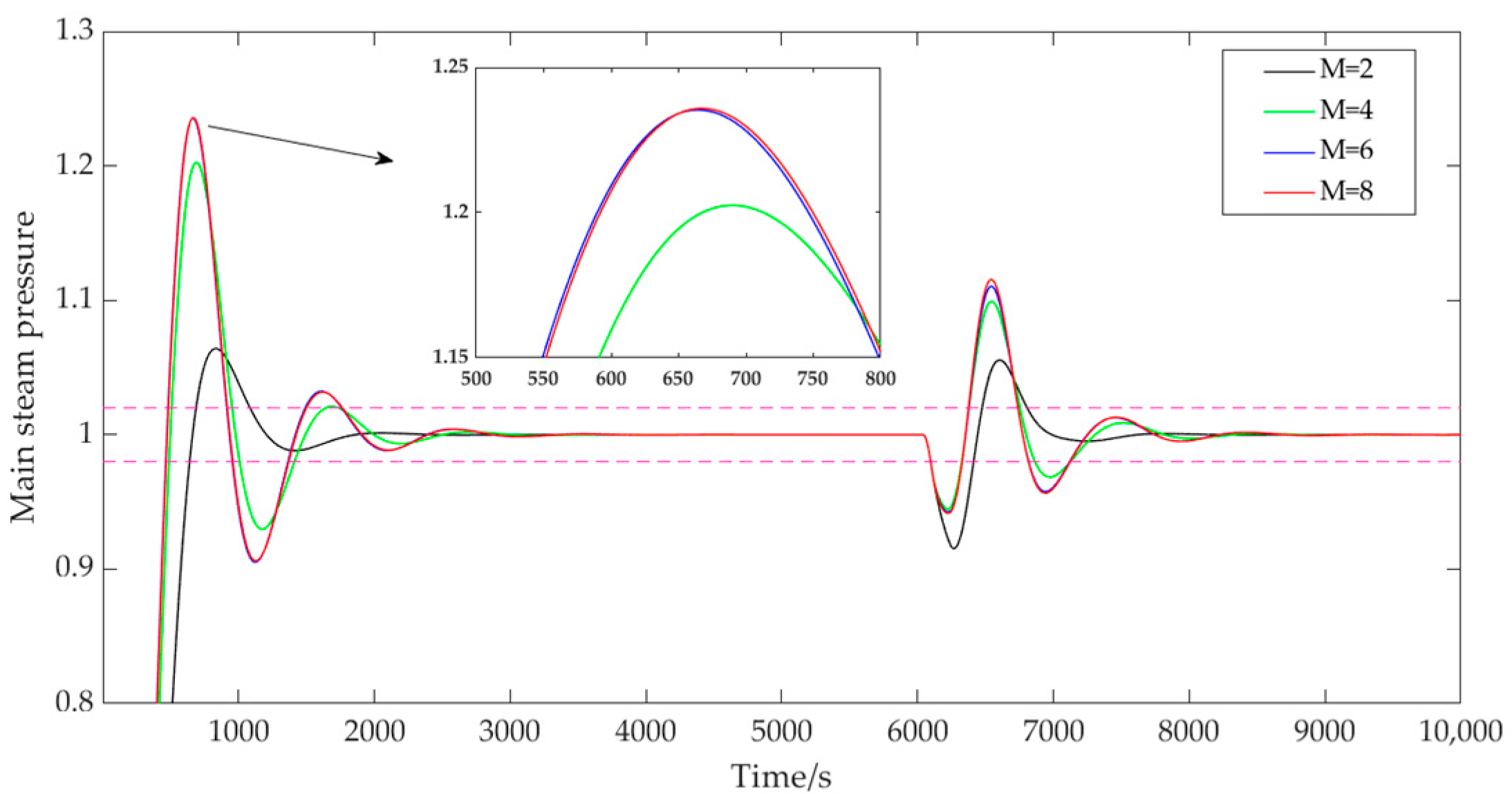
- (2)
- The influence of the control horizon .
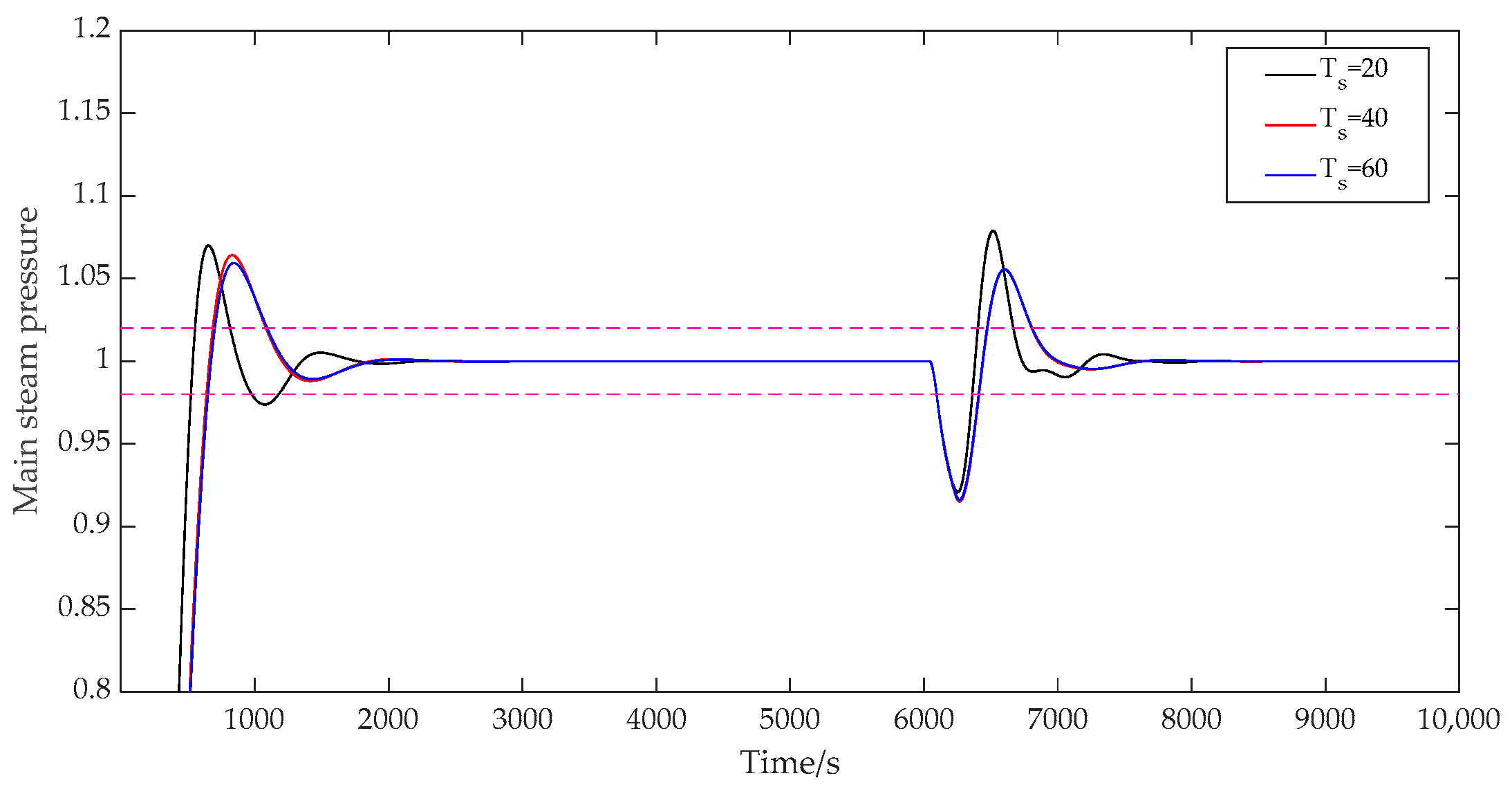
- (3)
- The influence of the discrete time .
- (4)
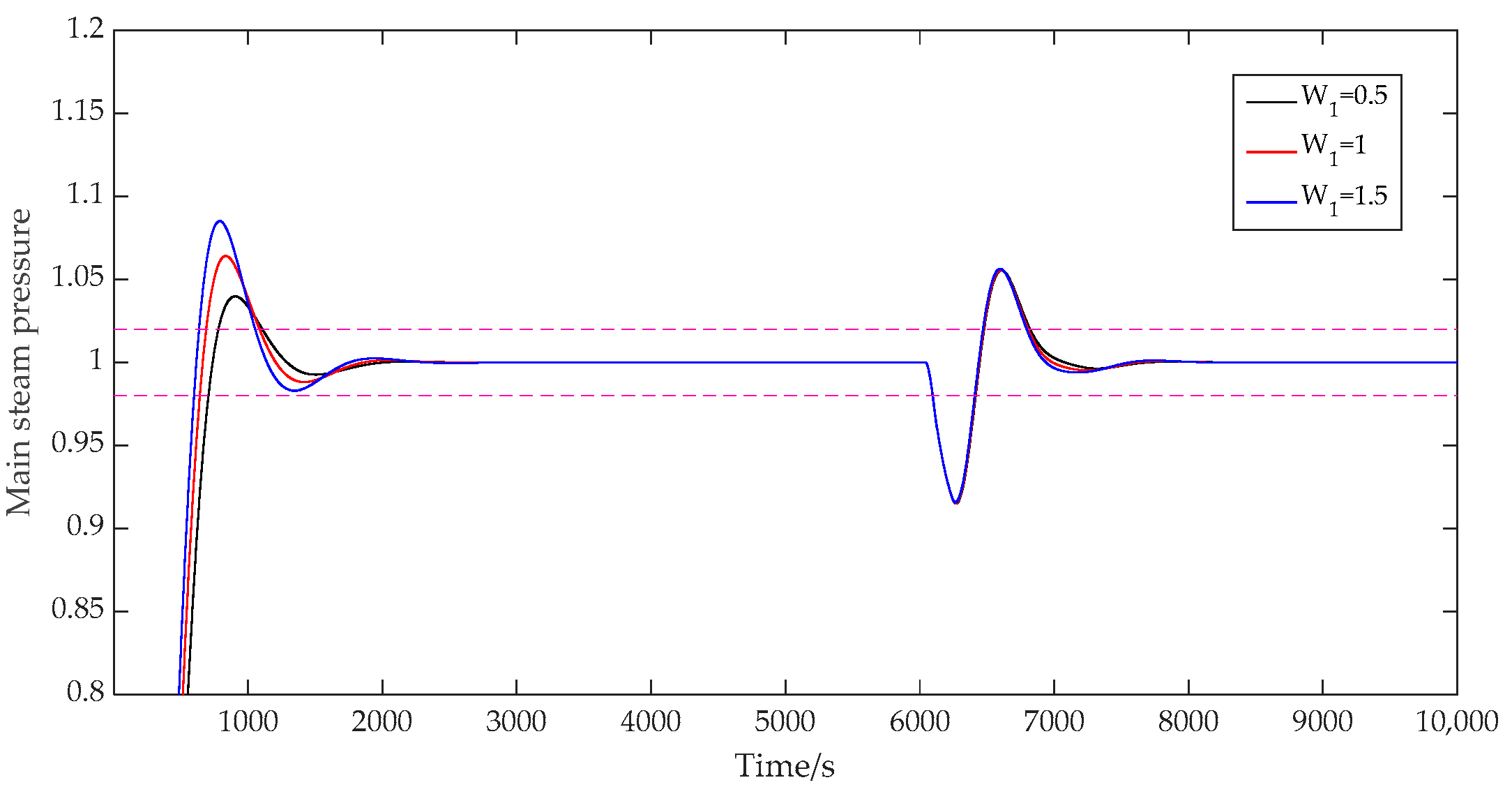
- The influence of the adjustment weight .
- (5)
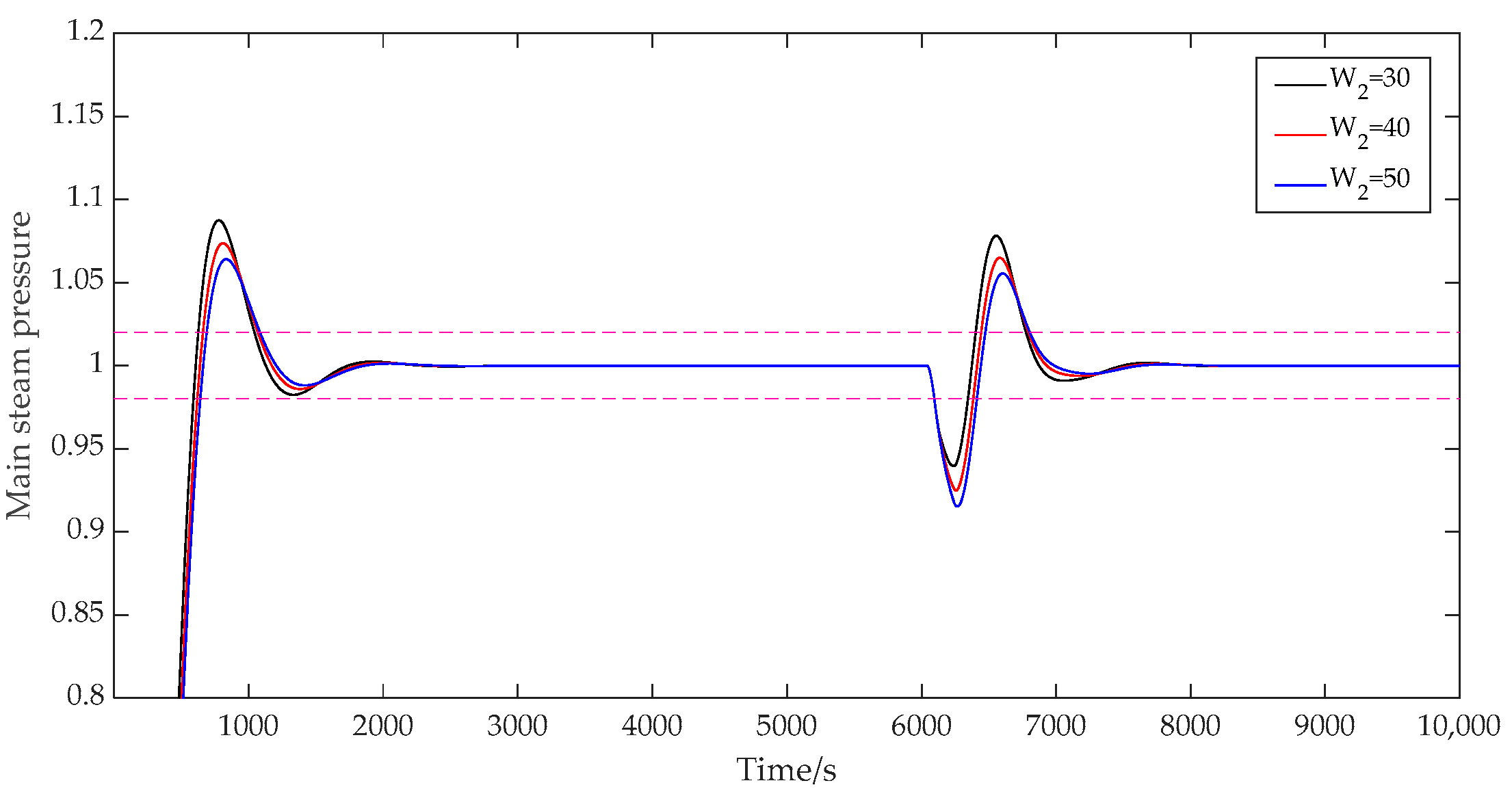
- The influence of the error weight .
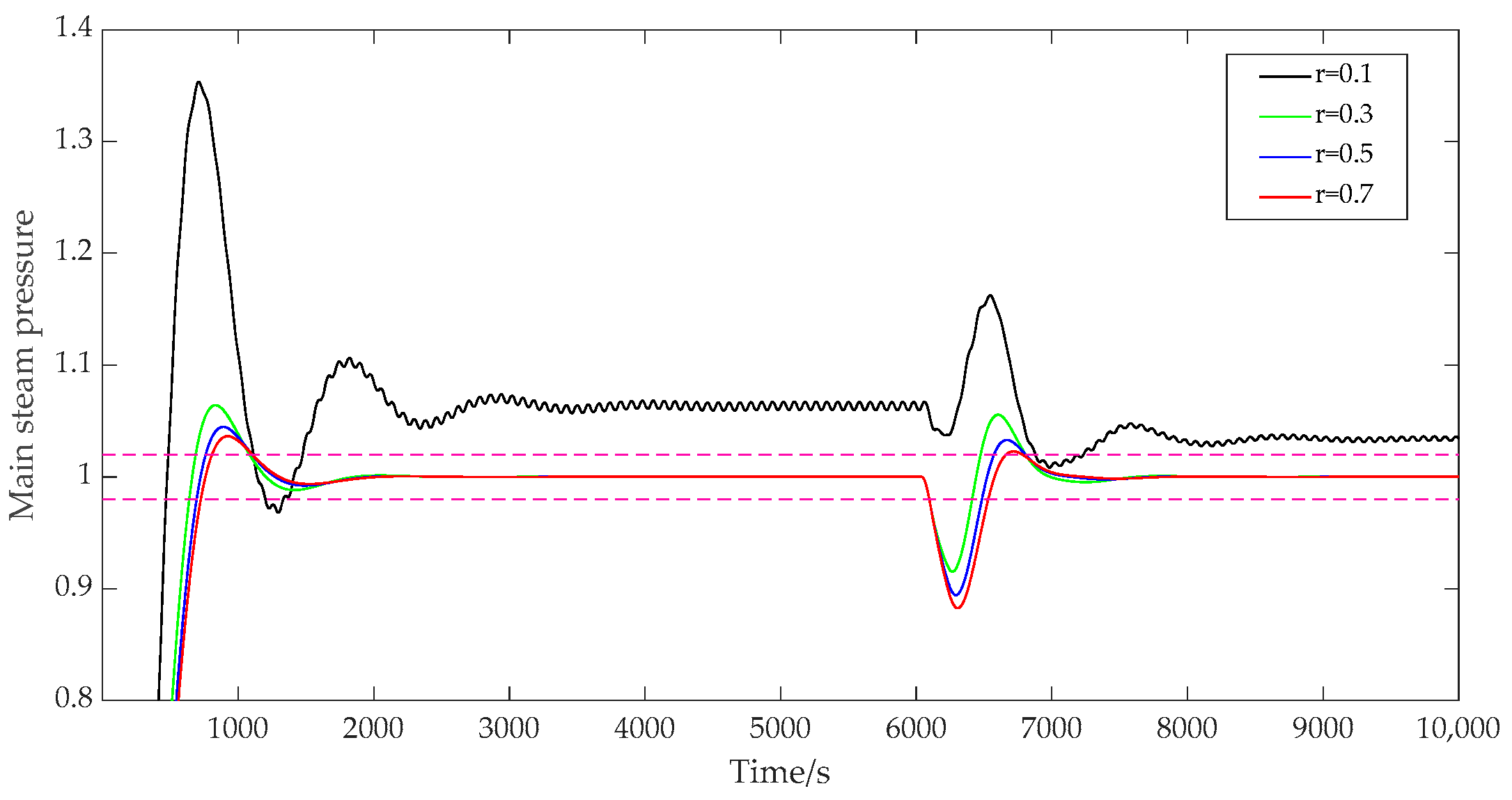
- (6)
- The influence of the control weight .
4.2. Tracking Performance Comparison
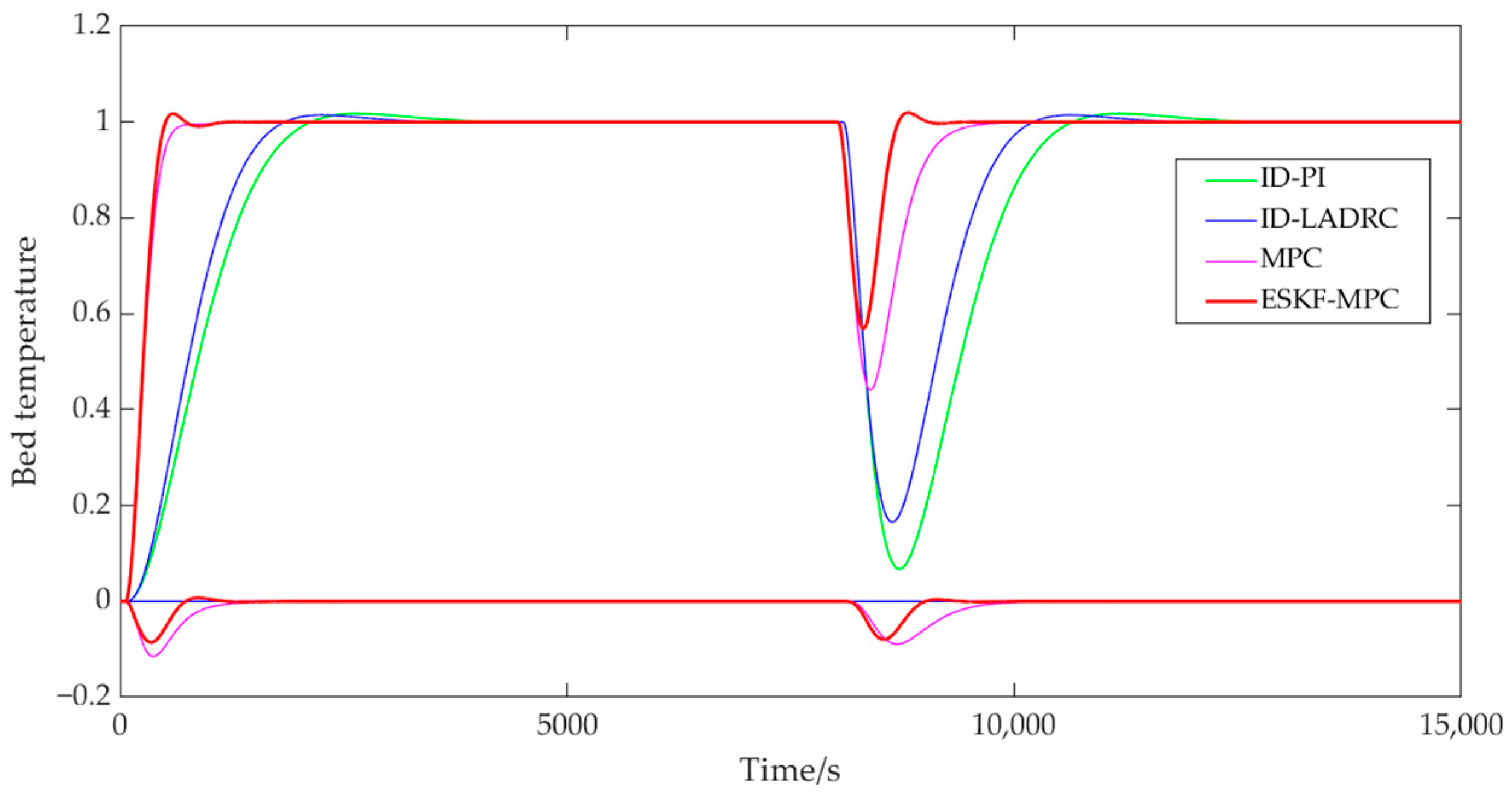
4.3. Comparison of Anti-Interference Performance
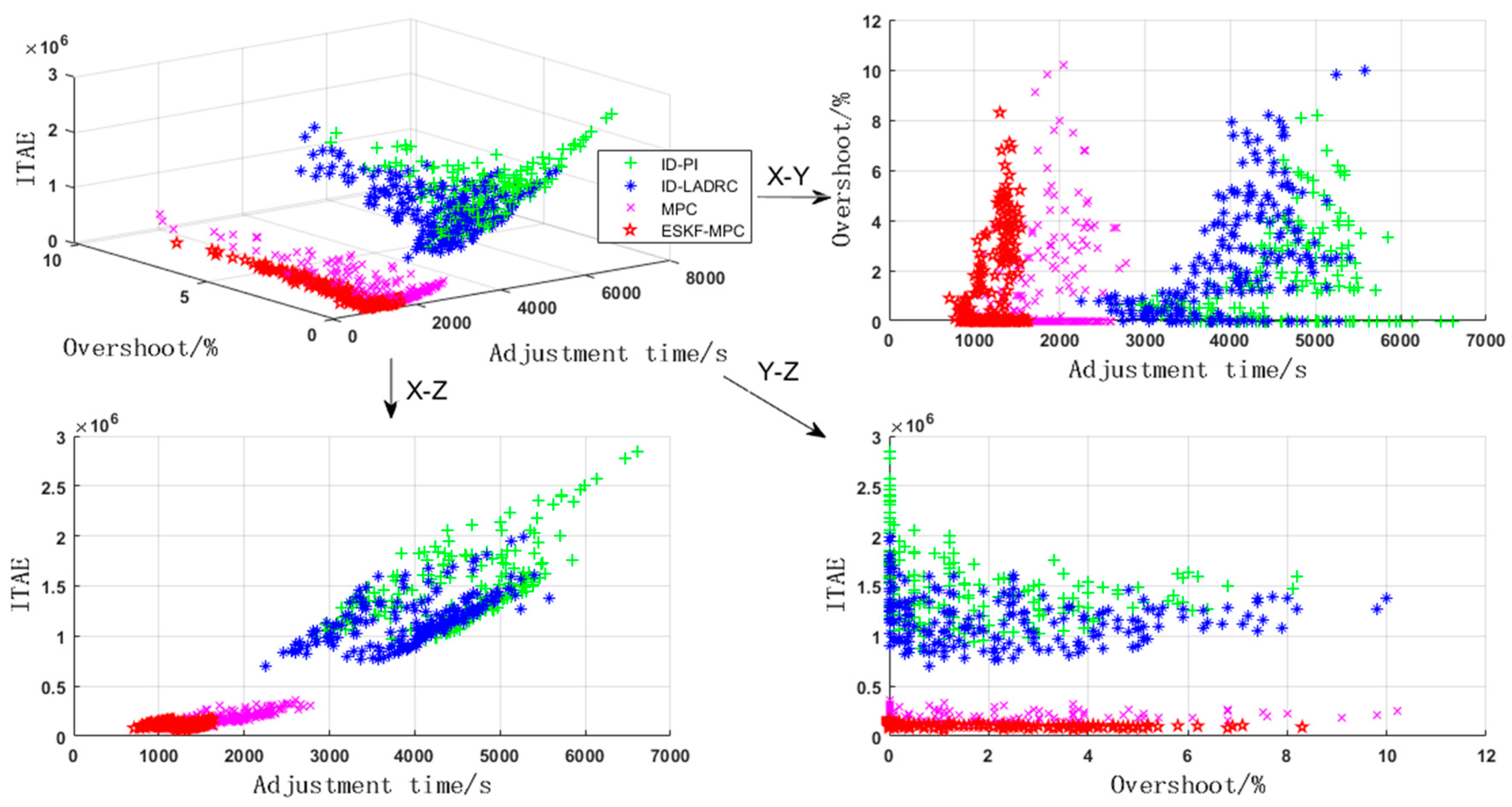
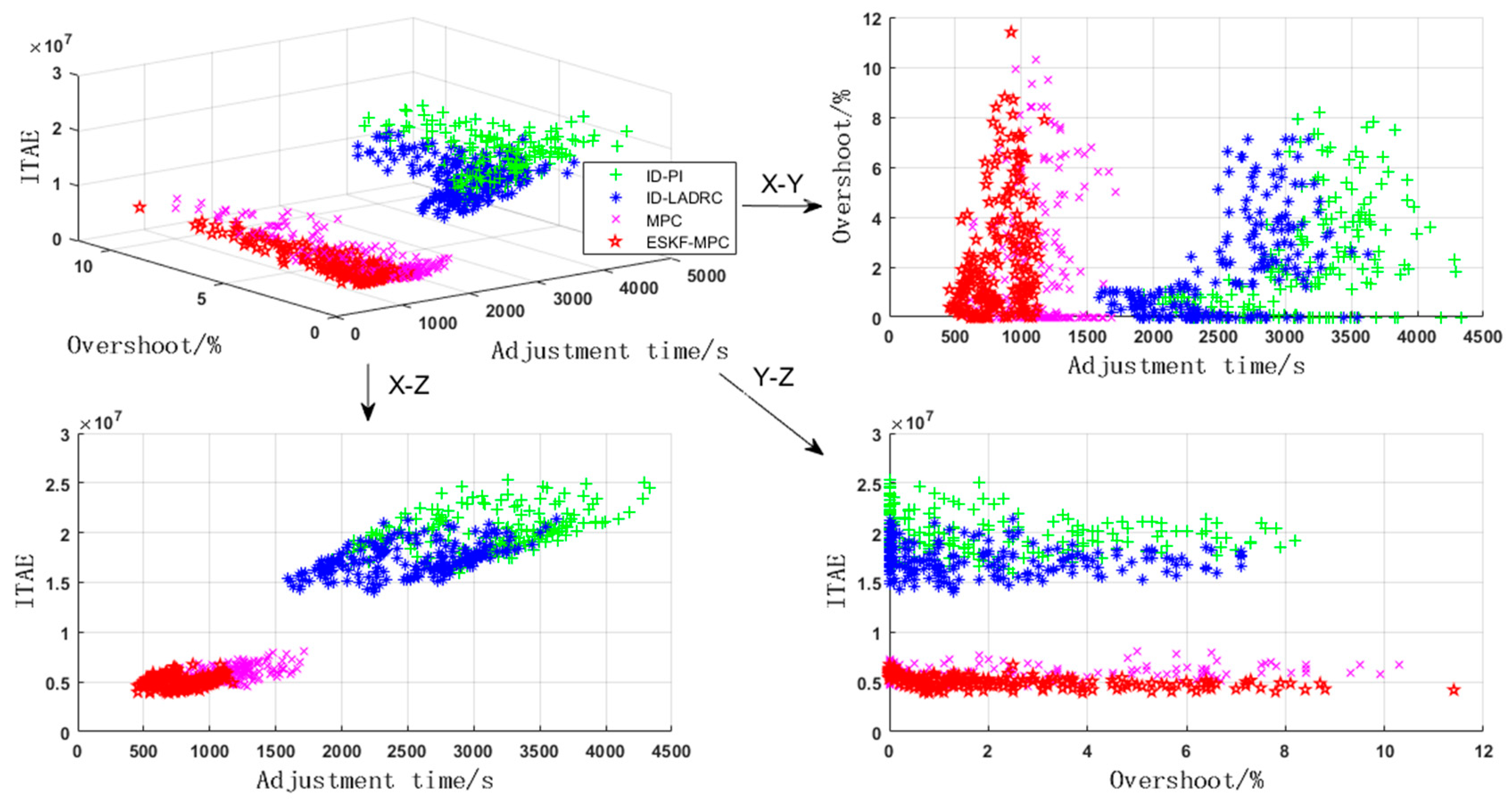
4.4. Comparison of Robust Performance
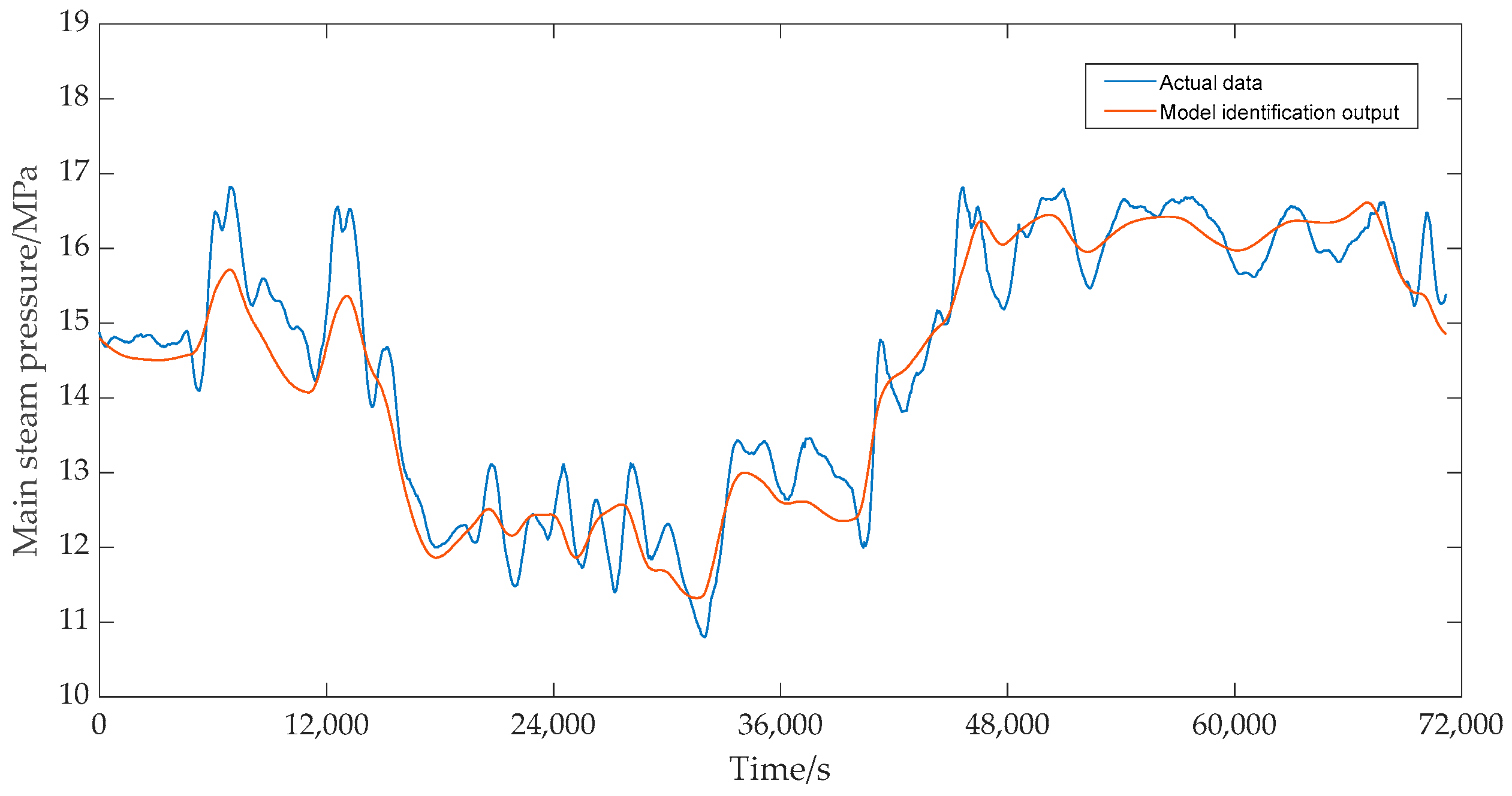
4.5. Application in Actual Continuous Change Working Conditions
5. Conclusions
- (1)
- For the multi-variable, strongly coupled, and nonlinear CFBB combustion system, the ESKF-MPC control strategy is well suited to handle this complex multi-input and multi-output control scenario. This strategy takes into account the interactions between system variables during the parameter setting process of the controller, thereby ensuring optimal overall control performance. For a system with such coupling, the control algorithm of PI and LADRC designed for single-loop systems must implement a decoupling strategy to achieve the desired control performance.
- (2)
- By expanding the “total disturbance” inside and outside the system into new observed variables, the ESKF can accurately estimate the values of all state variables and disturbances in the system at each moment. This approach effectively addresses the issue of low control performance caused by system model errors and overcomes the traditional MPC reliance on an accurate prediction model.
- (3)
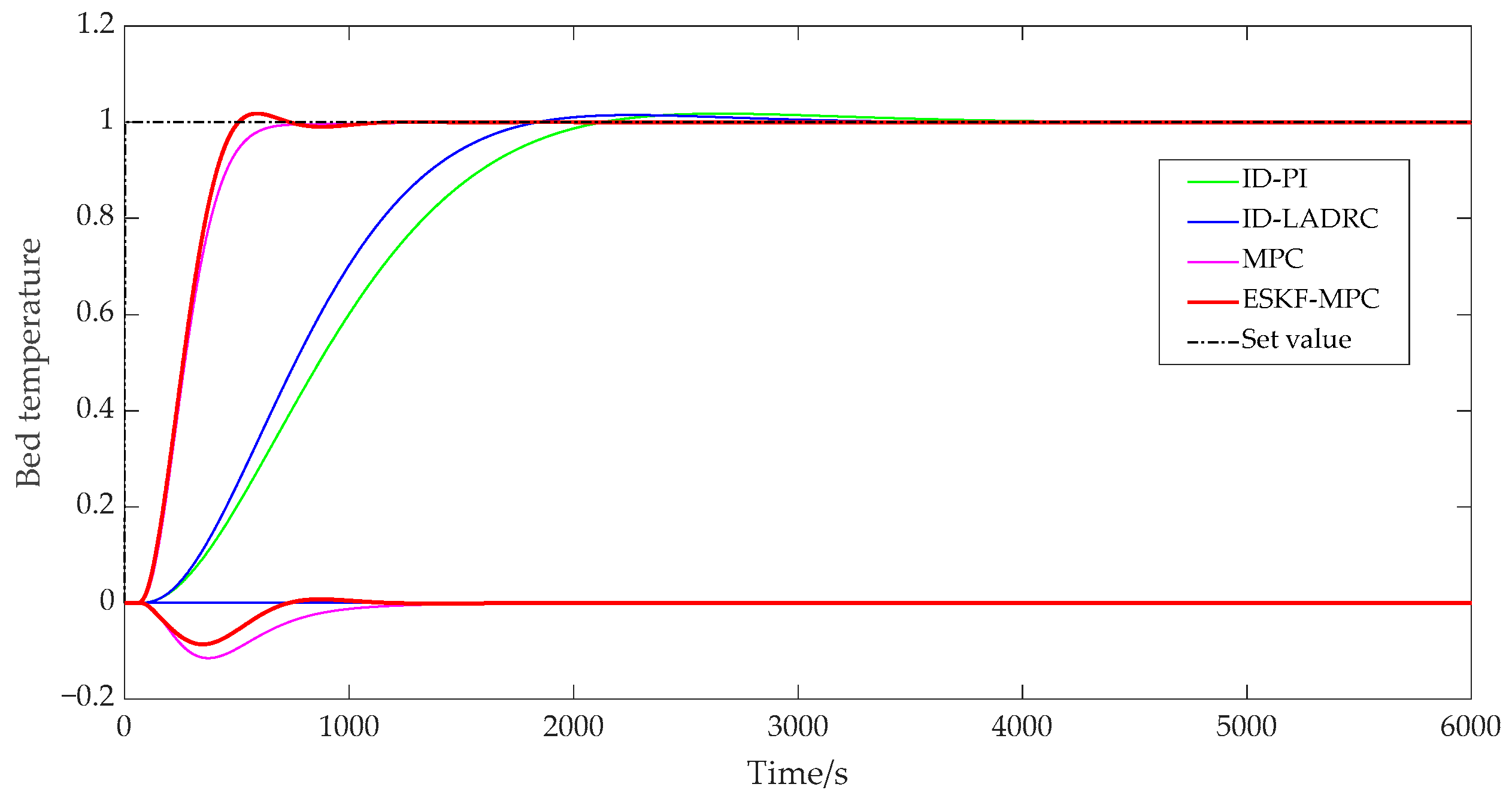
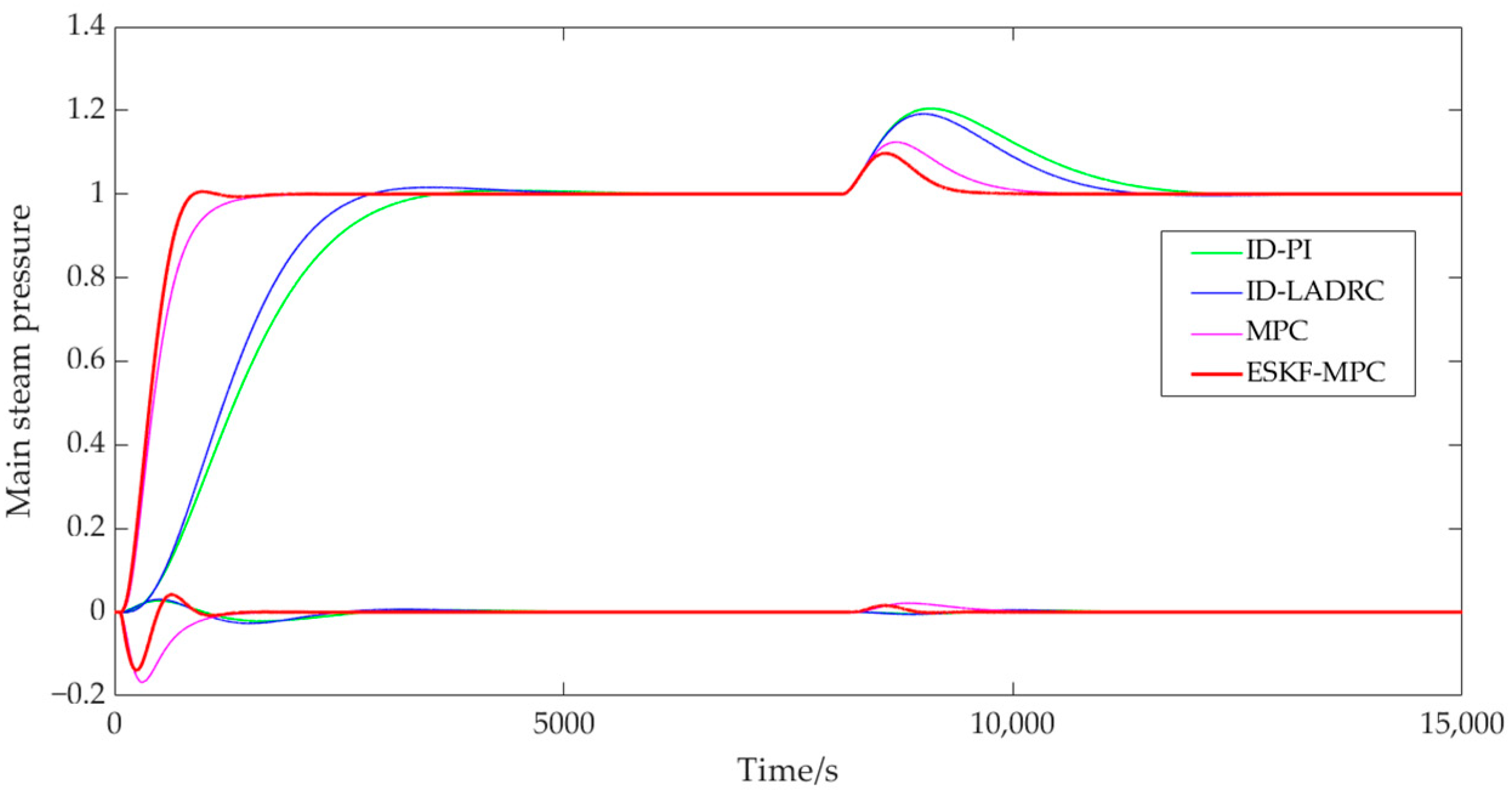
- Compared to MPC control, ID-PI control, and ID-LADRC control with decoupling strategies, the proposed ESKF-MPC composite control method demonstrates the shortest adjustment time during the set point tracking process, with almost no overshoot. When disturbances are introduced to the two coupled control loops of the system, each loop exhibits minimal overshoot and the fastest recovery time. Additionally, when model parameters undergo changes, the ITAE index value remains relatively small under the ESKF-MPC strategy.
- (4)
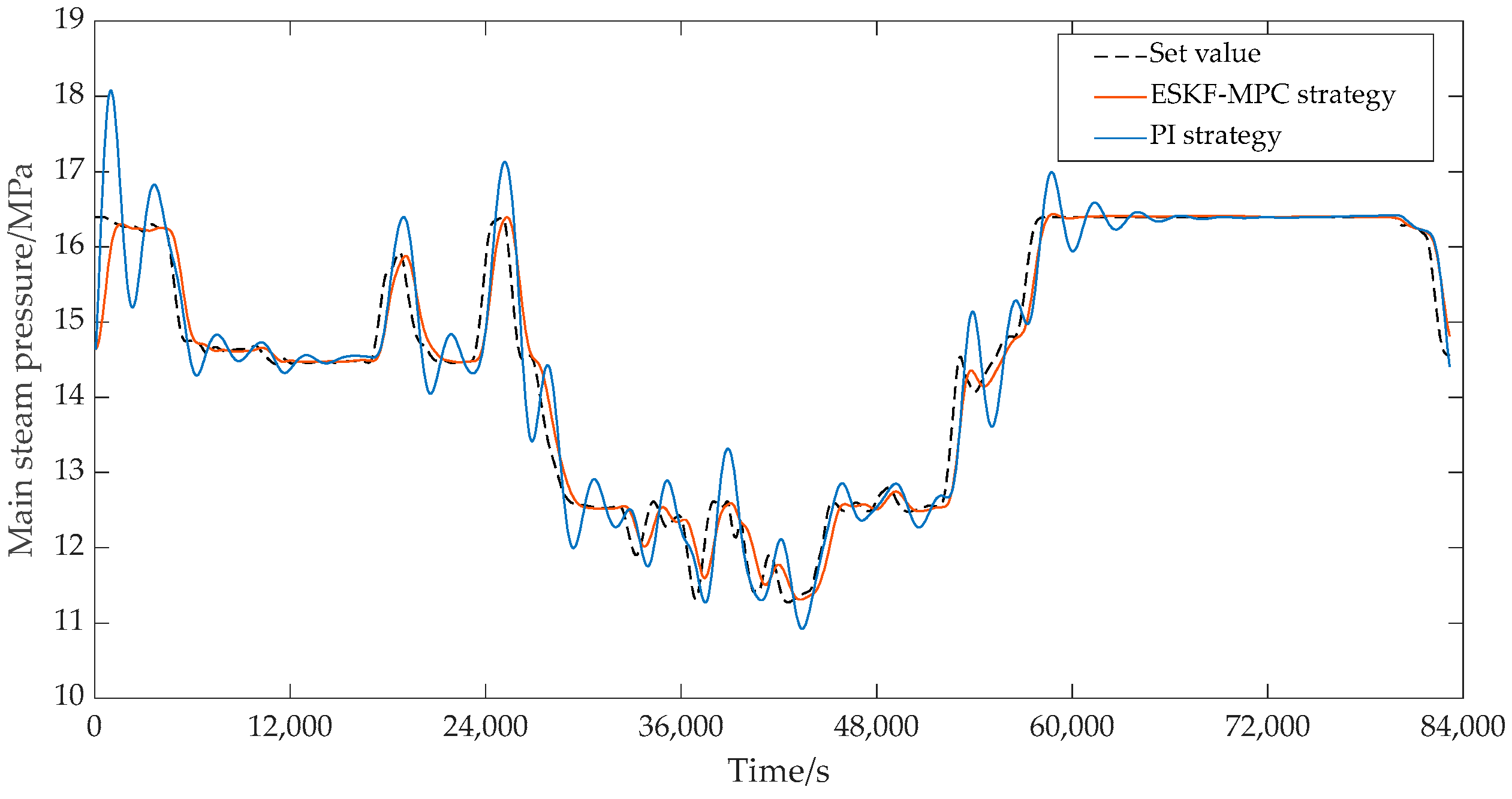
- Under continuously changing operating conditions, the main steam pressure loop of the CFBB combustion system using the ESKF-MPC strategy achieves rapid tracking and disturbance elimination, with no significant overshoot or output shock. This effectively prevents operational instability caused by frequent fluctuations in the main steam pressure. In the coupled bed temperature loop, the ESKF-MPC strategy significantly reduces the bed temperature fluctuation range compared to the PI strategy, which helps to ensure the economic operation of the unit.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| The real-time combustion heat discharge | The state vector of the system | ||
| The coal instruction | The control input vector of the system | ||
| The primary air | The disturbance of the system | ||
| The secondary air | The measurement output vector of the system | ||
| The boiler water supply | The measurement noise vector | ||
| The heat absorption of the heat exchange medium | The coefficient matrix | ||
| The bed temperature | The input matrix | ||
| The main steam pressure | The output matrix | ||
| The state matrix of the system after discretization | The error matrix | ||
| The input matrix of the system after discretization | The prior estimation covariance at time k | ||
| The output matrix of the system after discretization | The covariance matrix for measuring noise | ||
| The expanded state estimate | The posterior estimation covariance at k time | ||
| The actual output value | The posterior estimation covariance at k−1 time | ||
| The output estimate | The noise covariance matrix of the system | ||
| The Kalman gain coefficient changing with time | The system’s augmented matrix coefficients | ||
| The reference track of the controlled object | The system’s augmented matrix coefficients | ||
| The output vector of the system | The system’s augmented matrix coefficients | ||
| The control increment of the system | The state variables under the augmented matrix | ||
| The weight coefficient | The amount of coal fed | ||
| The prediction time domain | The primary air volume | ||
| The control time domain | The main steam pressure | ||
| The weight coefficient of output error | The bed temperature | ||
| The control increment weight coefficient |
References
- Zhuo, X.; Lou, C.; Zhou, H.; Zhuo, J.; Fu, P. Hierarchical Takagi-Sugeno fuzzy hyperbolic tangent static model control for a circulating fluidized bed boiler thermal power unit. Energy 2018, 162, 910–917. [Google Scholar] [CrossRef]
- Wang, D.F.; Han, P.; Zhai, Y.J. Predictive fuzzy controller for bed temperature system of CFB boiler based on multi-sensor information fusion algorithm. In Proceedings of the Fifth World Congress on Intelligent Control and Automation, Hangzhou, China, 15–19 June 2004; Volume 4, pp. 3498–3502. [Google Scholar]
- Li, X.-F.; Chen, S.-H.; Zhong, Q. The coordinated control of circulating fluidized bed boiler with fuzzy feedforward control. In Proceedings of the 2011 Annual Meeting of the North American Fuzzy Information Processing Society, El Paso, TX, USA, 18–20 March 2011; pp. 1–8. [Google Scholar]
- Dong, Z.; Sun, J.; Zhang, Y.Y.; Han, P. CFB boiler bed temperature’s improved fuzzy control. In Proceedings of the 2009 Chinese Control and Decision Conference, Guilin, China, 17–19 June 2009; pp. 3345–3349. [Google Scholar]
- Wu, Z.; Yuan, J.M.; Liu, Y.; Li, D.; Chen, Y. A synthesis method for first-order active disturbance rejection controllers: Procedures and field tests. Control. Eng. Pr. 2022, 127, 105286. [Google Scholar] [CrossRef]
- Zhang, F.; Xue, Y.; Li, D.; Wu, Z.; He, T. On the Flexible Operation of Supercritical Circulating Fluidized Bed: Burning Carbon Based Decentralized Active Disturbance Rejection Control. Energies 2019, 12, 1132. [Google Scholar] [CrossRef]
- Feng, X.G.; Huang, P.H.; Zhang, Z.C.; Wang, Z.B.; Song, A.G. Sliding Mode Active Disturbance Rejection Control of Generator Units Based on GA Fuzzy RBF. J. Instrum. 2023, 44, 319–328. [Google Scholar]
- Wu, Z.; Shi, G.; Li, D.; Chen, Y.; Zhang, Y. Control of the fluidized bed combustor based on active disturbance rejection control and bode ideal cut-off. IFAC-PapersOnLine 2020, 53, 12517–12522. [Google Scholar] [CrossRef]
- Su, Z.-G.; Sun, L.; Xue, W.; Lee, K.Y. A review on active disturbance rejection control of power generation systems: Fundamentals, tunings and practices. Control. Eng. Pract. 2023, 141, 105716. [Google Scholar] [CrossRef]
- Wu, Z.; Li, D.; Xue, Y.; Chen, Y. Gain scheduling design based on active disturbance rejection control for thermal power plant under full operating conditions. Energy 2019, 185, 744–762. [Google Scholar] [CrossRef]
- Wu, Z.; He, T.; Liu, Y.; Li, D.; Chen, Y. Physics-informed energy-balanced modeling and active disturbance rejection control for circulating fluidized bed units. Control Eng. Pr. 2021, 116, 104934. [Google Scholar] [CrossRef]
- Zlatkovikj, M.; Li, H.; Zaccaria, V.; Aslanidou, I. Development of feed-forward model predictive control for applications in biomass bubbling fluidized bed boilers. J. Process Control 2022, 115, 167–180. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, T.; Sun, L.; Huang, S.; Zhang, Z. Piecewise affine model identification and predictive control for ultra-supercritical circulating fluidized bed boiler unit. Comput. Chem. Eng. 2023, 174, 108257. [Google Scholar] [CrossRef]
- Zhu, H.; Shen, J.; Lee, K.Y.; Sun, L. Multi-model based predictive sliding mode control for bed temperature regulation in circulating fluidized bed boiler. Control. Eng. Pr. 2020, 101, 104484. [Google Scholar] [CrossRef]
- Dong, Z.B.; Xiang, W.G.; Wang, X. Predictive control on bed temperature of CFB boilers based on multiple models. J. Chin. Soc. Power Eng. 2011, 31, 181–186. [Google Scholar]
- Wei, H.; Liu, S.; He, J.; Liu, Y.; Zhang, G. Research on Model Predictive Control of a 130 t/h Biomass Circulating Fluidized Bed Boiler Combustion System Based on Subspace Identification. Energies 2023, 16, 3421. [Google Scholar] [CrossRef]
- Tan, C.; Chen, Z.; Shao, Y.H.; Zhao, Z.Y.; Zhou, C.; Li, Q.W.; Yang, C.; Zheng, C.H.; Gao, X. Research on Multi Model Predictive Control of Circulating Fluidized Bed Unit Denitration System with Feedforward Correction. Chin. J. Electr. Eng. 2023, 43, 1867–1875. [Google Scholar]
- Guo, W.; Qiao, D.D.; Li, T.; Li, M.J. Laguerre function model fractional order PID predictive control for CFB boiler bed temperature. Therm. Power Gener. 2018, 47, 121–126. [Google Scholar]
- Guo, W.; Chen, C.; Lu, Z.Y.; Zhou, L.; Yu, Z.B. GPC-PID control of bed temperature in circulating fluidized bed boilers. Therm. Power Gener. 2015, 44, 97–101. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar]
- Wu, Z.; Li, D.; Xue, Y.; Sun, L.; He, T.; Zheng, S. Modified active disturbance rejection control for fluidized bed combustor. ISA Trans. 2020, 102, 135–153. [Google Scholar] [CrossRef]
- Wu, Z.; He, T.; Li, D.; Xue, Y.; Sun, L.; Sun, L.M. Superheated steam temperature control based on modified active disturbance rejection control. Control Eng. Pract. 2019, 83, 83–97. [Google Scholar] [CrossRef]
- Wu, Z.L.; Li, D.H.; Liu, Y.H.; Chen, Y.Q. Modified active disturbance rejection control based on gain scheduling for circulating fluidized bed units. J. Process Control. 2024, 140, 103253. [Google Scholar] [CrossRef]
- Wang, Y.S.; Chen, Z.Q.; Sun, M.W.; Sun, Q.L. Smith Predictive Active Disturbance Rejection Control for First Order Inertial Large Time Delay Systems. J. Intell. Syst. 2018, 13, 500–508. [Google Scholar]
- Chen, G.; Liu, D.; Mu, Y.; Xu, J.; Cheng, Y. A Novel Smith Predictive Linear Active Disturbance Rejection Control Strategy for the First-Order Time-Delay Inertial System. Math. Probl. Eng. 2021, 2021, 1–13. [Google Scholar] [CrossRef]
- Zhang, B.; Tan, W.; Li, J. Tuning of Smith predictor based generalized ADRC for time-delayed processes via IMC. ISA Trans. 2020, 99, 159–166. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.C.; Gao, J.; Zhong, Y.B.; Zhang, L.Y. Delay time weakening active disturbance rejection control for first-order large time-delay systems. J. Cent. South Univ. Nat. Sci. Ed. 2021, 52, 1493–1501. [Google Scholar]
- Li, X.Y.; Gao, Z.Q.; Tian, S.P.; Ai, W. Weakening of Delay Time and Active Disturbance Rejection Control for Uncertain Systems with Large Time Delays Weakening of Delay Time and Active Disturbance Rejection Control for Large Time Delay Uncertain Systems. Control Theory Appl. 2024, 41, 249–260. [Google Scholar]
- Sun, L.; Li, D.; Lee, K.Y. Enhanced decentralized PI control for fluidized bed combustor via advanced disturbance observer. Control Eng. Pract. 2015, 42, 128–139. [Google Scholar] [CrossRef]
- Sun, L.; Dong, J.Y.; Li, D.H.; Lee, K.Y. A Practical Multivariable Control Approach Based on Inverted Decoupling and Decentralized Active Disturbance Rejection Control. Ind. Eng. Chem. Res. 2016, 55, 2008–2019. [Google Scholar] [CrossRef]
- Ji, G.; Huang, J.; Zhang, K.; Zhu, Y.; Lin, W.; Ji, T.; Zhou, S.; Yao, B. Identification and predictive control for a circulation fluidized bed boiler. Knowl. Based Syst. 2013, 45, 62–75. [Google Scholar] [CrossRef]
- Huang, J. Model-plant mismatch detection of a nonlinear industrial circulation fluidized bed boiler using lpv model. IFAC-PapersOnLine 2018, 51, 1164–1171. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, X.; Shen, J. Extended state observer based fuzzy model predictive control for ultra-supercritical boiler-turbine unit. Appl. Therm. Eng. 2017, 118, 90–100. [Google Scholar] [CrossRef]
- Xue, W.; Zhang, X.; Sun, L.; Fang, H. Extended state filter based disturbance and uncertainty mitigation for nonlinear uncertain systems with application to fuel cell temperature control. IEEE Trans. Ind. Electron. 2020, 67, 10682–10692. [Google Scholar] [CrossRef]
- Zhang, H.F.; Gao, M.M.; Yue, G.X.; Zhang, J.H. Dynamic model for subcritical circulating fluidized bed boiler-turbine units operated in a wide-load range. Appl. Therm. Eng. 2022, 213, 118742. [Google Scholar] [CrossRef]
- Zhang, H.; Gao, M.; Yu, H.; Fan, H.; Zhang, J. A dynamic nonlinear model used for controller design of a 600 MW supercritical circulating fluidized bed boiler-turbine unit. Appl. Therm. Eng. 2022, 212, 118547. [Google Scholar] [CrossRef]
- Zhang, H.; Gao, M.; Hong, F.; Liu, J.; Wang, X. Control-oriented modelling and investigation on quick load change control of subcritical circulating fluidized bed unit. Appl. Therm. Eng. 2019, 163. [Google Scholar] [CrossRef]
- Niu, Y.; Du, M.; Ge, W.; Luo, H.; Zhou, G. A dynamic nonlinear model for a once through boiler-turbine unit in low load. Appl. Therm. Eng. 2019, 161, 113880. [Google Scholar] [CrossRef]
- Gao, M.; Hong, F.; Zhang, B.; Liu, J.; Yue, G.; Yang, A.; Chen, F. Study on Nonlinear Control Model of Supercritical (Ultra Supercritical) Circulating Fluidized Bed Unit. Zhongguo Dianji Gongcheng Xuebao Proc. Chin. Soc. Electr. Eng. 2018, 38, 363–372+666. [Google Scholar]
- Yao, Y.; Shekhar, D.K. State of the art review on model predictive control (MPC) in Heating Ventilation and Air-conditioning (HVAC) field. Build. Environ. 2021, 200, 107952. [Google Scholar] [CrossRef]
- Bai, W.; Xue, W.; Huang, Y.; Fang, H. On extended state based Kalman filter design for a class of nonlinear time-varying uncertain systems. Sci. China Inf. Sci. 2018, 61, 1–16. [Google Scholar] [CrossRef]
- Reif, K.; Gunther, S.; Yaz, E.; Unbehauen, R. Stochastic stability of the discrete-time extended Kalman filter. IEEE Trans. Autom. Control. 1999, 44, 714–728. [Google Scholar] [CrossRef]
- Huang, R.; Patwardhan, S.C.; Biegler, L.T. Robust stability of nonlinear model predictive control based on extended Kalman filter. J. Process Control 2012, 22, 82–89. [Google Scholar] [CrossRef]
- Li, F.Z.; Ma, S.X. Fuzzy Adaptive PID Control of Circulating Fluidized Bed Boiler Combustion System Based on Dynamic Universe. J. Power Eng. 2021, 41, 195–200. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | Main Steam Pressure Loop | Bed Temperature Loop | ||
|---|---|---|---|---|
| Adjustment Time/s | Overshoot/% | Adjustment Time/s | Overshoot/% | |
| ID-PI | 3163 | 0.83 | 1949 | 1.75 |
| ID-LADRC | 2611 | 1.61 | 1675 | 1.47 |
| MPC | 1268 | 0 | 592 | 0 |
| ESKF-MPC | 794 | 0.63 | 476 | 1.81 |
| Control Strategy | Adjustment Time | ITAE Range | |
|---|---|---|---|
| Distribution Range of Adjustment Time | Time Span | ||
| ID-PI | 2900~6000 s | 3100 s | [0.87 × 106, 2.84 × 106] |
| ID-LADRC | 2600~5000 s | 2400 s | [0.7 × 106, 1.99 × 106] |
| MPC | 1000~2600 s | 1600 s | [1.02 × 105, 3.56 × 105] |
| ESKF-MPC | 770~1600 s | 830 s | [0.615 × 105, 1.74 × 105] |
| Control Strategy | Distribution Range of Adjustment Time | ITAE Range | Mean Value of Overshoot |
|---|---|---|---|
| ID-PI | 2000~4000 s | [1.59 × 107, 2.54 × 107] | 2.13% |
| ID-LADRC | 1590~3500 s | [1.4 × 107, 2.14 × 107] | 1.85% |
| MPC | 520~1600 s | [4.44 × 106, 8.11 × 106] | 2.08% |
| ESKF-MPC | 460~1100 s | [3.9 × 106, 6.75 × 106] | 2.25% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Wang, L.; Meng, E.; Liu, Y.; Yin, S. Flexible Optimal Control of the CFBB Combustion System Based on ESKF and MPC. Sensors 2025, 25, 1262. https://doi.org/10.3390/s25041262
Han L, Wang L, Meng E, Liu Y, Yin S. Flexible Optimal Control of the CFBB Combustion System Based on ESKF and MPC. Sensors. 2025; 25(4):1262. https://doi.org/10.3390/s25041262
Chicago/Turabian StyleHan, Lei, Lingmei Wang, Enlong Meng, Yushan Liu, and Shaoping Yin. 2025. "Flexible Optimal Control of the CFBB Combustion System Based on ESKF and MPC" Sensors 25, no. 4: 1262. https://doi.org/10.3390/s25041262
APA StyleHan, L., Wang, L., Meng, E., Liu, Y., & Yin, S. (2025). Flexible Optimal Control of the CFBB Combustion System Based on ESKF and MPC. Sensors, 25(4), 1262. https://doi.org/10.3390/s25041262