

Transmission Control Protocol (TCP)-Based Delay Tolerant Networking for Space-Vehicle Communications in Cislunar Domain: An Experimental Approach
Abstract
1. Introduction
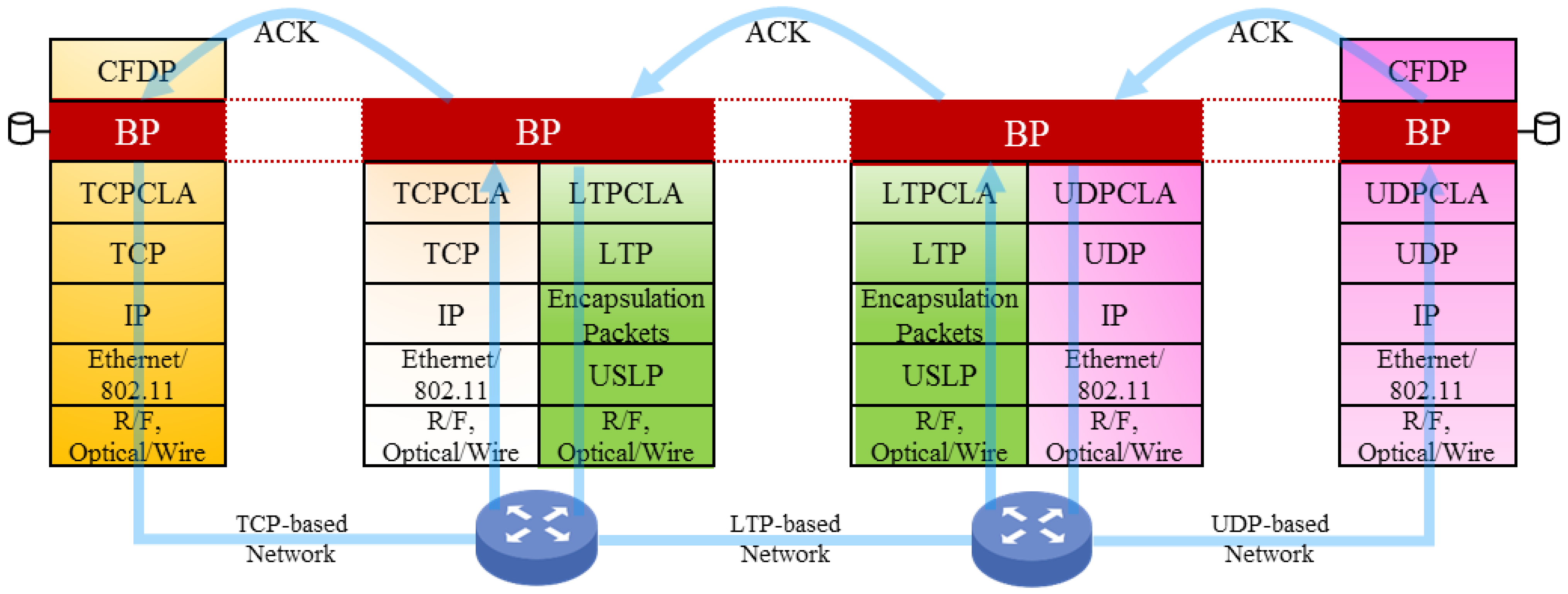
2. DTN Protocol Stack and Related Work
3. Experimental Setup and Study Results
3.1. Experimental Setup and Configurations
3.2. Experimental Results
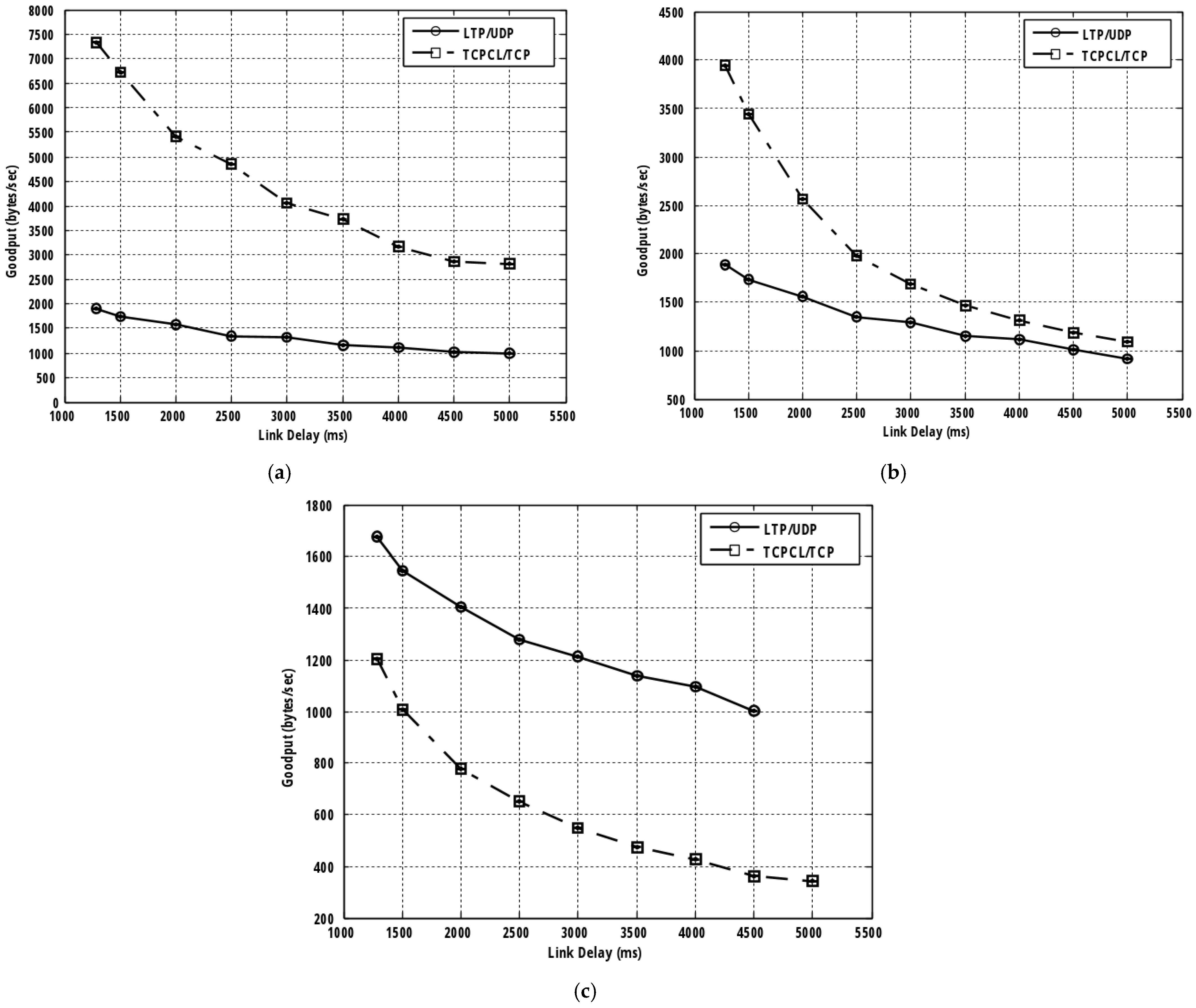
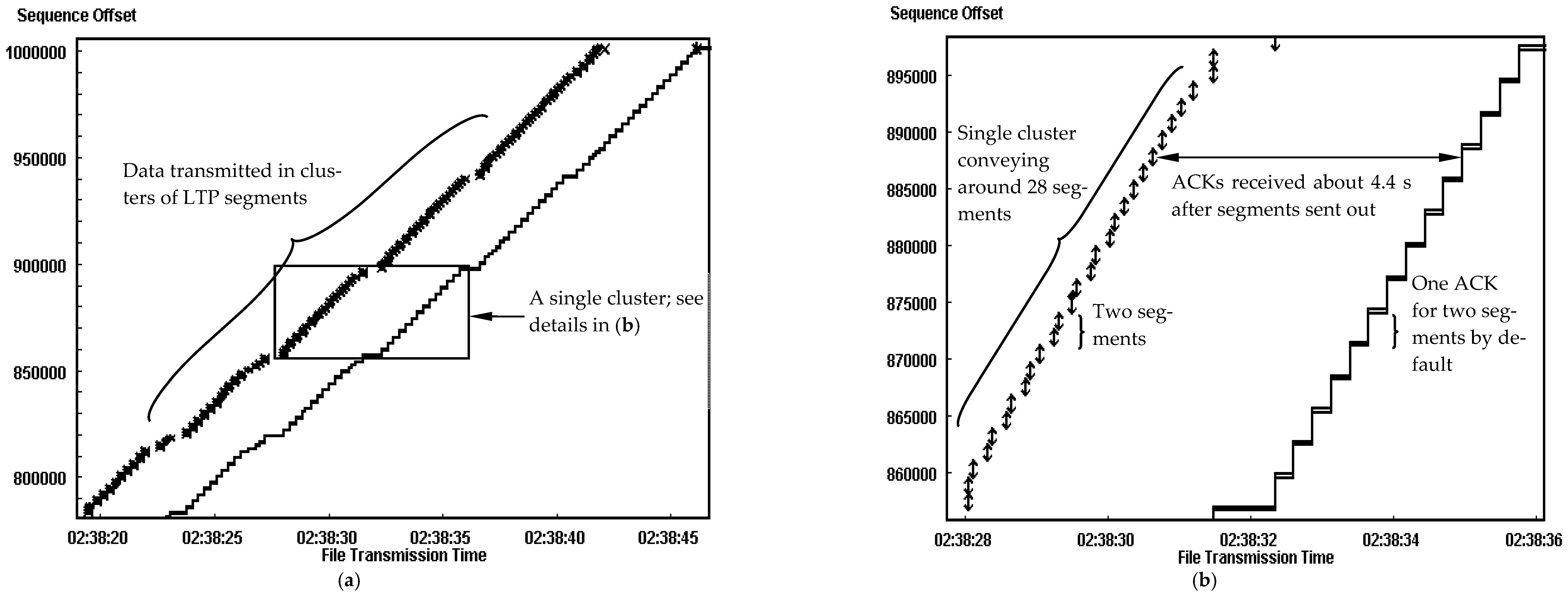
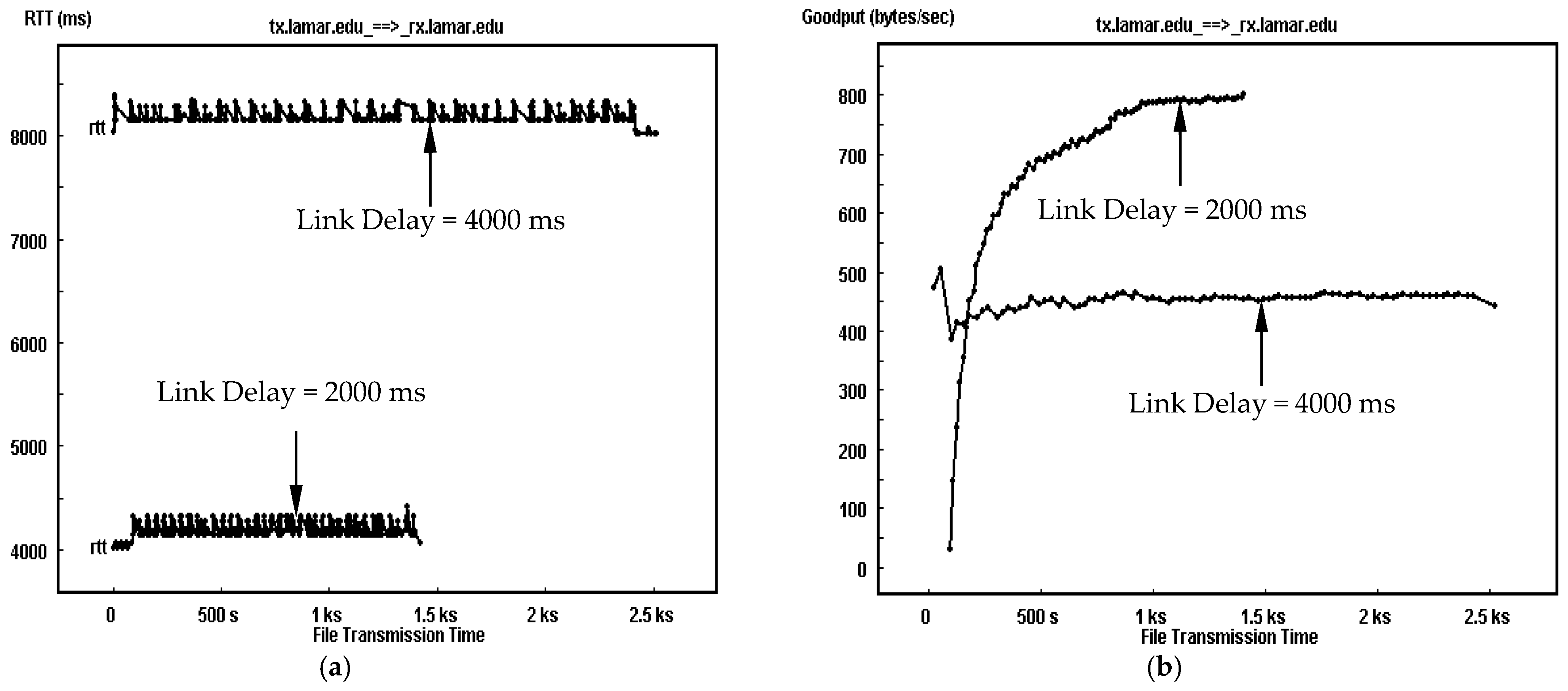
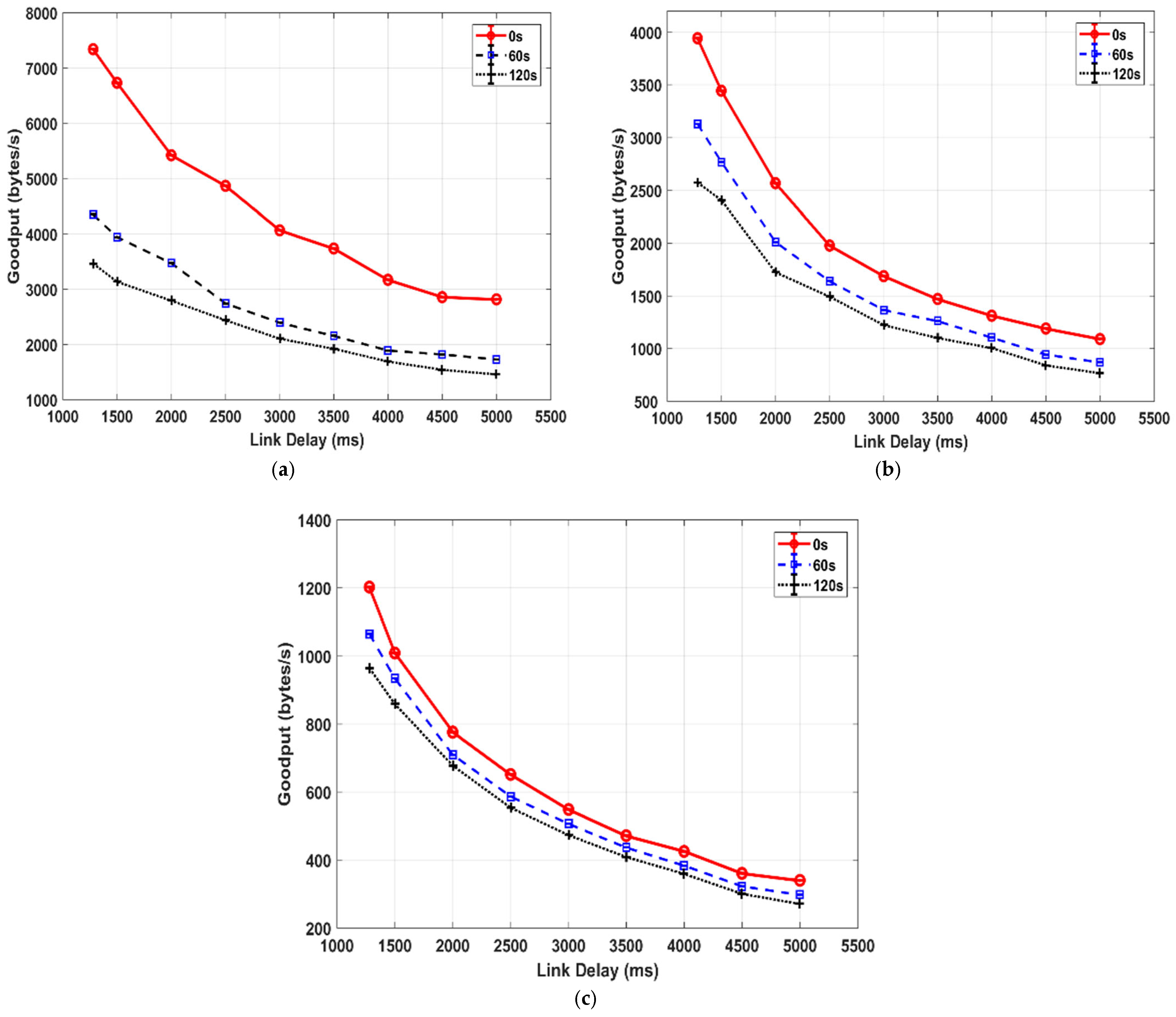
3.2.1. Experimental Results Without Link Disruption Event
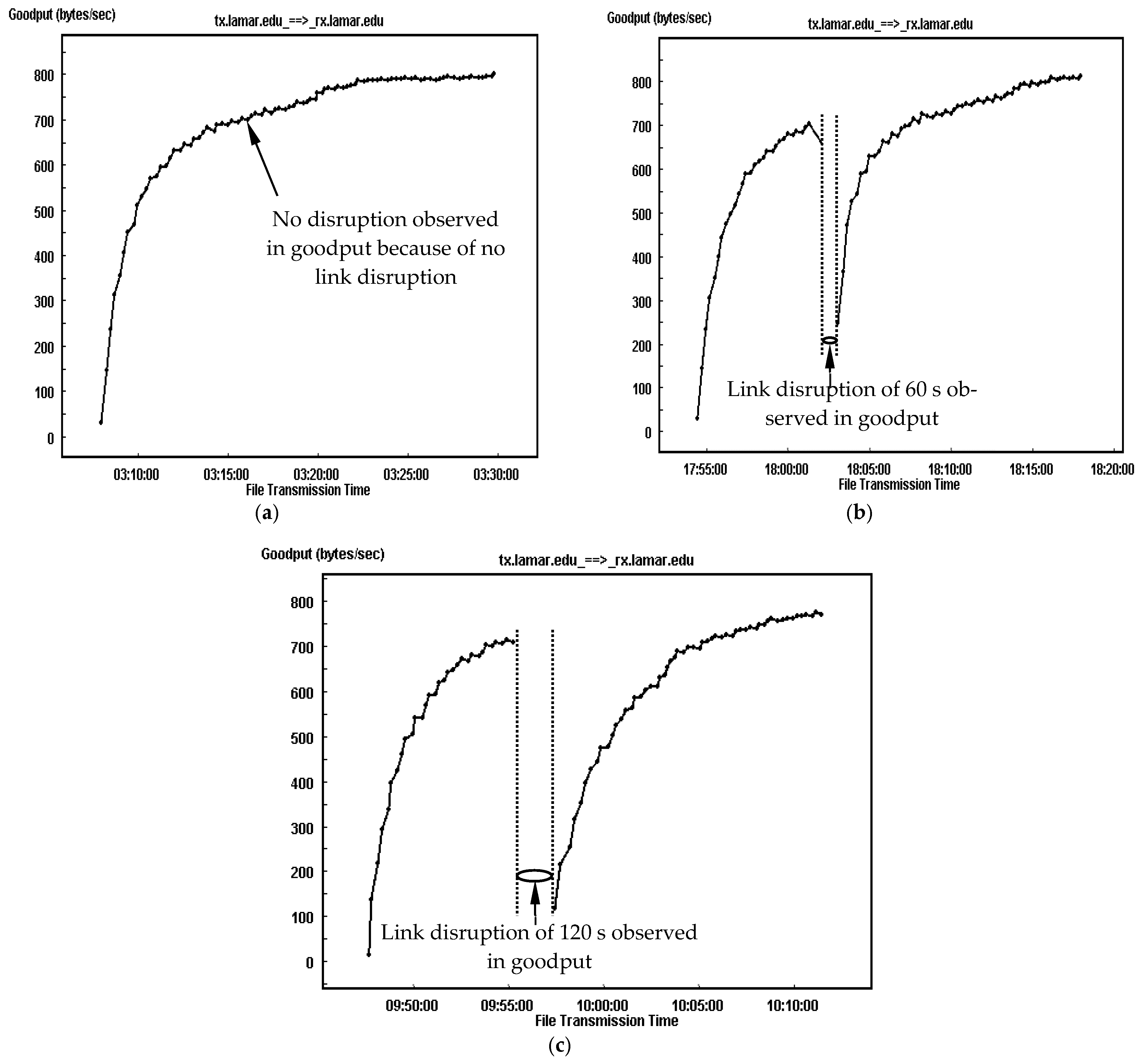
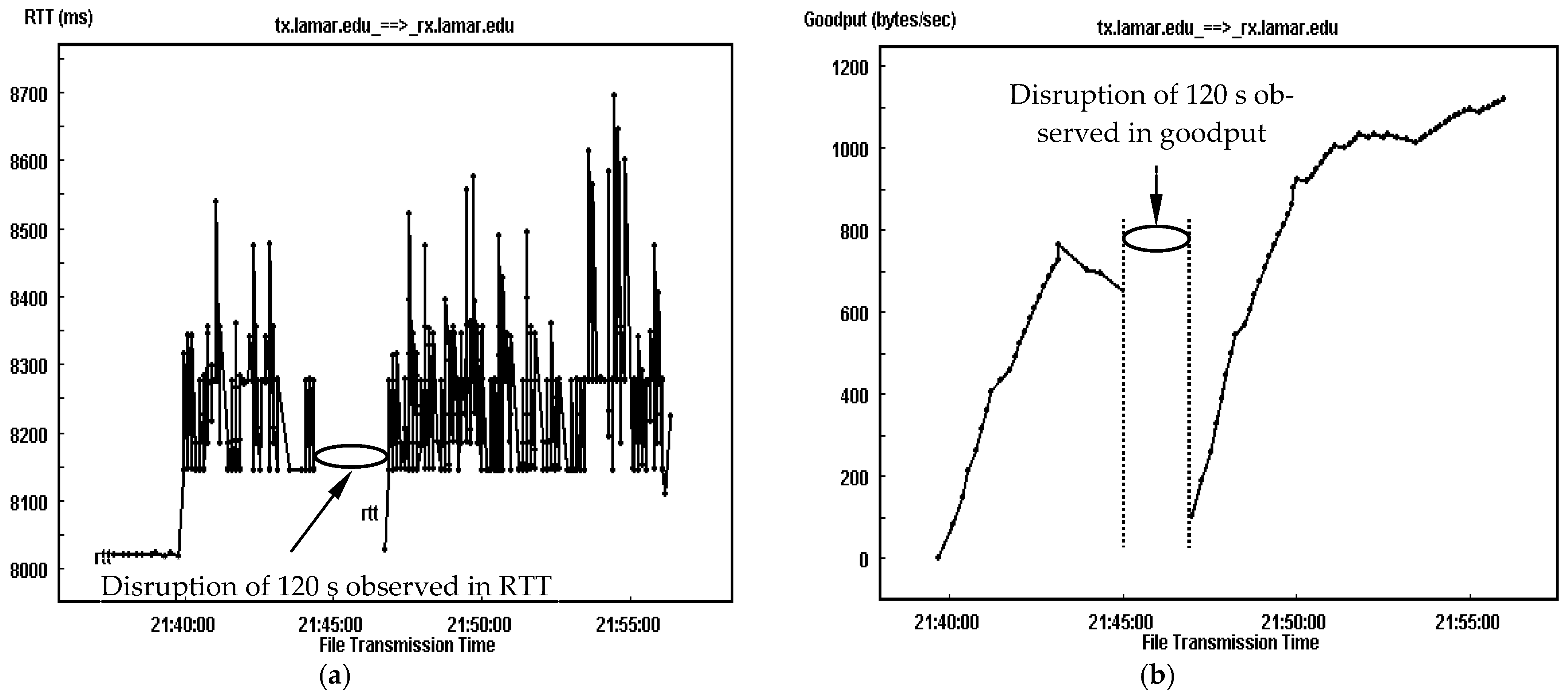
3.2.2. Experimental Results with Link Disruption Event
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- De Cola, T.; Marchese, M. Performance analysis of data transfer protocols over space communications. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1200–1223. [Google Scholar] [CrossRef]
- Burleigh, S.; Hooke, A.; Torgerson, L.; Fall, K.; Cerf, V.; Durst, R.; Scott, K.; Weiss, H. Delay-tolerant networking: An approach to inter-planetary Internet. IEEE Commun. Mag. 2003, 41, 128–136. [Google Scholar] [CrossRef]
- Scott, K.; Burleigh, S. Bundle Protocol Specification, IETF Request for Comments RFC 5050, November 2007. Available online: https://www.ietf.org/rfc/rfc5050.txt (accessed on 8 August 2023).
- Postel, J. Transmission Control Protocol―Darpa Internet Program―Protocol Specification; IETF Request for Comments RFC 793; IETF: Wilmington, DE, USA, 1981. [Google Scholar]
- Postel, J. User Datagram Protocol; IETF Request for Comments RFC 768; IETF: Wilmington, DE, USA, 1980. [Google Scholar]
- Shao, Z.; Wu, Q.; Fan, P.; Cheng, N.; Chen, W.; Wang, J.; Letaief, K.B. Semantic-Aware Spectrum Sharing in Internet of Vehicles Based on Deep Reinforcement Learning. IEEE Internet Things J. 2024, 11, 38521–38536. [Google Scholar] [CrossRef]
- Wang, X.; Wu, Q.; Fan, P.; Fan, Q.; Zhu, H.; Wang, J. Vehicle Selection for C-V2X Mode 4 Based Federated Edge Learning Systems. IEEE Syst. J. 2024, 18, 1927–1938. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, W.; Wu, Q.; Fan, P.; Fan, Q.; Wang, J.; Letaief, K.B. Distributed Deep Reinforcement Learning Based Gradient Quantization for Federated Learning Enabled Vehicle Edge Computing. IEEE Internet Things J. 2024, 3447036. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, W.; Fan, P.; Fan, Q.; Zhu, H.; Letaief, K.B. Cooperative Edge Caching Based on Elastic Federated and Multi-Agent Deep Reinforcement Learning in Next-Generation Networks. IEEE Trans. Netw. Serv. Manag. 2024, 21, 4179–4196. [Google Scholar] [CrossRef]
- Consultative Committee for Space Data Systems. Bundle Protocol Specifications; CCSDS 734.2- B-1, Blue Book, Issue 1; CCSDS: Washington, DC, USA, 2015. [Google Scholar]
- The Space Internetworking Strategy Group (SISG). Recommendations on a Strategy for Space Internetworking; Report of the Interagency Operations Advisory Group (IOAG), Rep. IOAG.T.RC.002.V1; NASA Headquarters: Washington, DC, USA, 2010. Available online: https://cwe.ccsds.org/sis/docs/SIS%20Area/SOLAR%20SYSTEM%20INTERNET/SISG%20Phase%20I%20report%20%E2%80%93%20final.pdf (accessed on 10 June 2024).
- Demmer, M.; Ott, J. Delay Tolerant Networking TCP Convergence Layer Protocol. IETF DTNRG IRTF Research Group, draft-irtf-dtnrg-tcp-clayer-02.txt (Work in Progress), November 2008. Available online: https://www.ietf.org/archive/id/draft-irtf-dtnrg-tcp-clayer-02.txt (accessed on 15 June 2022).
- DTN Reference Implementation, October 2013 Release. Available online: https://github.com/delay-tolerant-networking/DTN2 (accessed on 12 April 2024).
- Ramadas, M.; Burleigh, S.; Farrell, S. Licklider Transmission Protocol―Specification. IETF Request for Comments RFC 5326, September 2008. Available online: https://www.ietf.org/rfc/rfc5326.txt?number=5326 (accessed on 18 July 2023).
- Kruse, H.; Ostermann, S. UDP Convergence Layers for the DTN Bundle and LTP Protocols. IETF DTNRG IRTF Research Group, draft-irtf-dtnrg-udp-clayer-00.txt (Work in Progress), November 2008. Available online: https://datatracker.ietf.org/doc/draft-irtf-dtnrg-udp-clayer (accessed on 9 March 2023).
- Wang, R.; Burleigh, S.; Parik, P.; Lin, C.-J.; Sun, B. Licklider Transmission Protocol (LTP)-based DTN for cislunar communications. IEEE/ACM Trans. Netw. 2011, 19, 359–368. [Google Scholar] [CrossRef]
- Lent, R. Analysis of the block delivery time of the Licklider transmission protocol. IEEE Trans. Commun. 2019, 67, 518–526. [Google Scholar] [CrossRef]
- Sabbagh, A.; Wang, R.; Zhao, K.; Bian, D. Bundle Protocol over Highly Asymmetric Deep-Space Channels. IEEE Trans. Wirel. Commun. 2017, 16, 2478–2489. [Google Scholar] [CrossRef]
- Bezirgiannidis, N.; Burleigh, S.; Tsaoussidis, V. Delivery Time Estimation for Space Bundles. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1897–1910. [Google Scholar] [CrossRef]
- Yang, G.; Wang, R.; Sabbagh, A.; Zhao, K.; Zhang, X. Modeling Optimal Retransmission Timeout Interval for Bundle Protocol. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2493–2508. [Google Scholar] [CrossRef]
- Sabbagh, A.; Wang, R.; Burleigh, S.; Zhao, K. Analytical Framework for Effect of Link Disruption on Bundle Protocol in Deep-Space Communications. IEEE J. Sel. Areas Commun. Spec. Issue Adv. Satell. Commun. 2018, 36, 1086–1096. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, R.; Yang, L.; Liang, J.; Burleigh, S.; Zhao, K. A Study of Transmission Overhead of a Hybrid Bundle Retransmission Approach for Deep-Space Communications. IEEE Trans. Aerosp. Electron. Syst. Spec. Sect. Inf. Commun. Technol. (ICT) A New Space Vis. 2022, 58, 3824–3839. [Google Scholar] [CrossRef]
- Wang, R.; Liu, X.; Yang, L.; Xi, Y.; Sanctis, M.D.; Zhao, K.; Yang, H.; Burleigh, S. A Study of DTN for Reliable Data Delivery from Space Station to Ground Station. IEEE J. Sel. Areas Commun. Spec. Issue Space Commun. New Front. Near Earth Deep Space 2024, 42, 1344–1358. [Google Scholar] [CrossRef]
- Consultative Committee for Space Data Systems. Cislunar Space Internetworking―Architecture; Draft Informational Report, CCSDS 730.1-G-0, Draft Green Book; National Aeronautics and Space Administration: Washington, DC, USA, 2006.
- Simpson, W. The Point-to-Point Protocol. IETF Request for Comments RFC 1661, July 1994. Available online: https://www.ietf.org/rfc/rfc1661.txt (accessed on 6 December 2022).
- Costello, D.J.; Hagenauer, J.; Imai, H.; Wicker, S.B. Applications of Error-Control Coding. IEEE Trans. Inf. Theory 1998, 44, 2531–2560. [Google Scholar] [CrossRef]
- National Aeronautics and Space Administration. Space Network Users’ Guide (SNUG); Rev. 10; Goddard Space Flight Center: Greenbelt, MD, USA, 2012.
- TCP Connection Analysis Tool: TCPTRACE. Available online: https://www.tcptrace.org/manual/index.html (accessed on 7 February 2023).
- Shepard, T. TCP Packet Trace Analysis. In MIT-LCS-TR-494, MIT Laboratory for Computer Science; Massachusetts Institute of Technology: Cambridge, MA, USA, 1991; Available online: http://www.xplot.org (accessed on 11 June 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Settings |
|---|---|
| Protocol setting | BP/TCPCL/TCP/IP/PPP vs. BP/LTP/UDP/IP/PPP |
| Operating system | Red-Hat Enterprise Linux 8 |
| Latency (one-way delay) | 1280 ms~5000 s |
| Date rate | 115,200 bit/s for each of data and ACK link |
| Channel quality | BERs of 0, 10−6 and 10−5 |
| Link disruption | Without disruption With disruption (with length of 60 s and 120 s) |
| Link Delay (ms) | Goodput at BER = 0 (byte/s) | Goodput at BER = 10−6 (byte/s) | Goodput at BER = 10−5 (byte/s) | |||
|---|---|---|---|---|---|---|
| TCPCL/TCP | LTP/UDP | TCPCL/TCP | LTP/UDP | TCPCL/TCP | LTP/UDP | |
| 1280 | 7336.36 | 1911 | 3940.8 | 1883 | 1201.4 | 1675 |
| 1500 | 6728.15 | 1753 | 3442.3 | 1732 | 1008.1 | 1543 |
| 2000 | 5416.85 | 1585 | 2565.4 | 1563 | 775.8 | 1407 |
| 2500 | 4865.4 | 1345 | 1977.1 | 1343 | 651.7 | 1279 |
| 3000 | 4065.3 | 1318 | 1687.1 | 1287 | 548.8 | 1212 |
| 3500 | 3735.7 | 1149 | 1470.3 | 1144 | 471.4 | 1136 |
| 4000 | 3169.4 | 1105 | 1310.7 | 1116 | 425.3 | 1094 |
| 4500 | 2855.7 | 1010 | 1189.5 | 1008 | 360.7 | 1001 |
| 5000 | 2814.95 | 989 | 1090.4 | 911 | 340 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Wang, R. Transmission Control Protocol (TCP)-Based Delay Tolerant Networking for Space-Vehicle Communications in Cislunar Domain: An Experimental Approach. Sensors 2025, 25, 1136. https://doi.org/10.3390/s25041136
Wang D, Wang R. Transmission Control Protocol (TCP)-Based Delay Tolerant Networking for Space-Vehicle Communications in Cislunar Domain: An Experimental Approach. Sensors. 2025; 25(4):1136. https://doi.org/10.3390/s25041136
Chicago/Turabian StyleWang, Ding, and Ruhai Wang. 2025. "Transmission Control Protocol (TCP)-Based Delay Tolerant Networking for Space-Vehicle Communications in Cislunar Domain: An Experimental Approach" Sensors 25, no. 4: 1136. https://doi.org/10.3390/s25041136
APA StyleWang, D., & Wang, R. (2025). Transmission Control Protocol (TCP)-Based Delay Tolerant Networking for Space-Vehicle Communications in Cislunar Domain: An Experimental Approach. Sensors, 25(4), 1136. https://doi.org/10.3390/s25041136