
Servo Collision Detection Control System Based on Robot Dynamics


Abstract
1. Introduction
2. Servo (Chengdu CRP Robot Technology Co., Ltd., Chengdu, China) System with Collision Detection Function
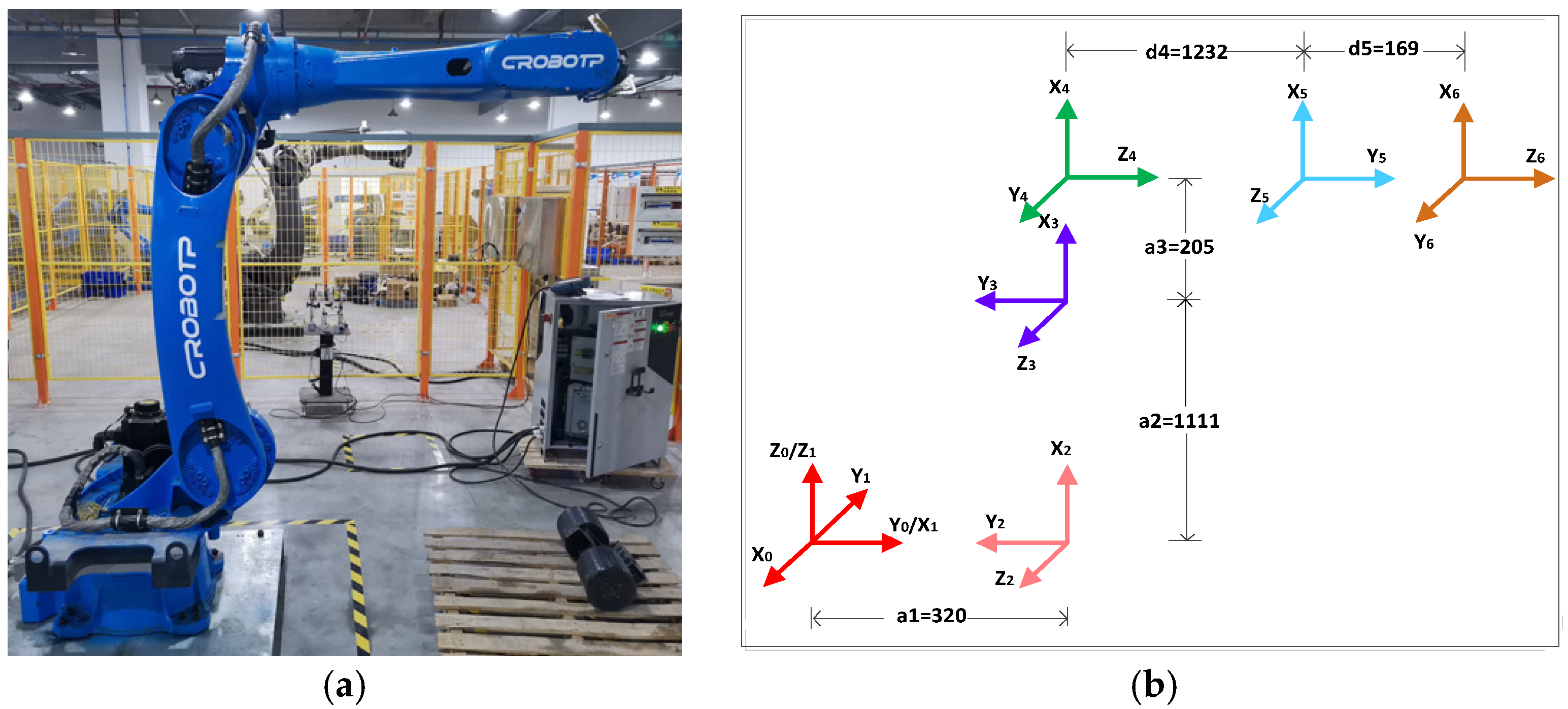
2.1. Hardware Platform
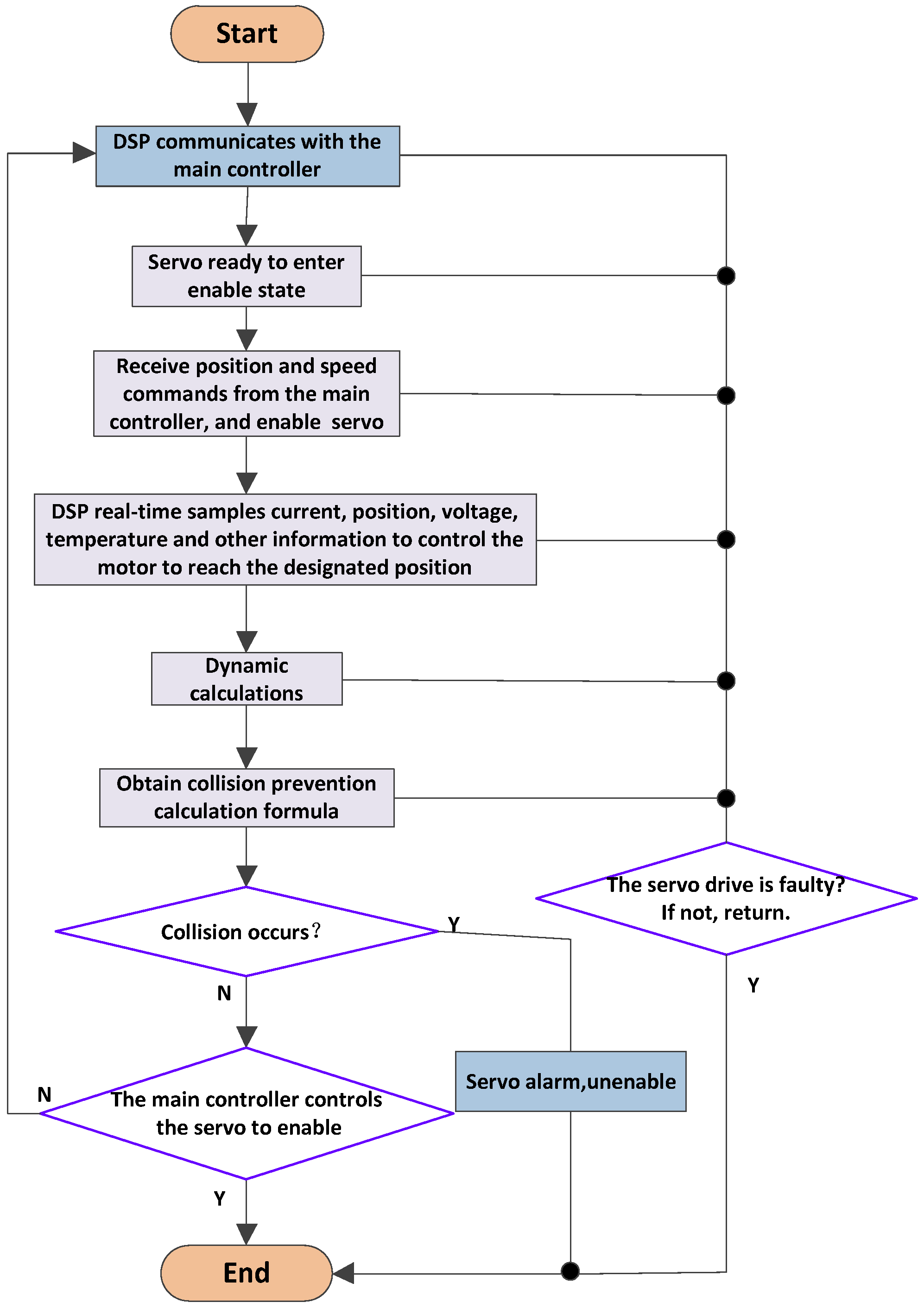
2.2. Software Framework
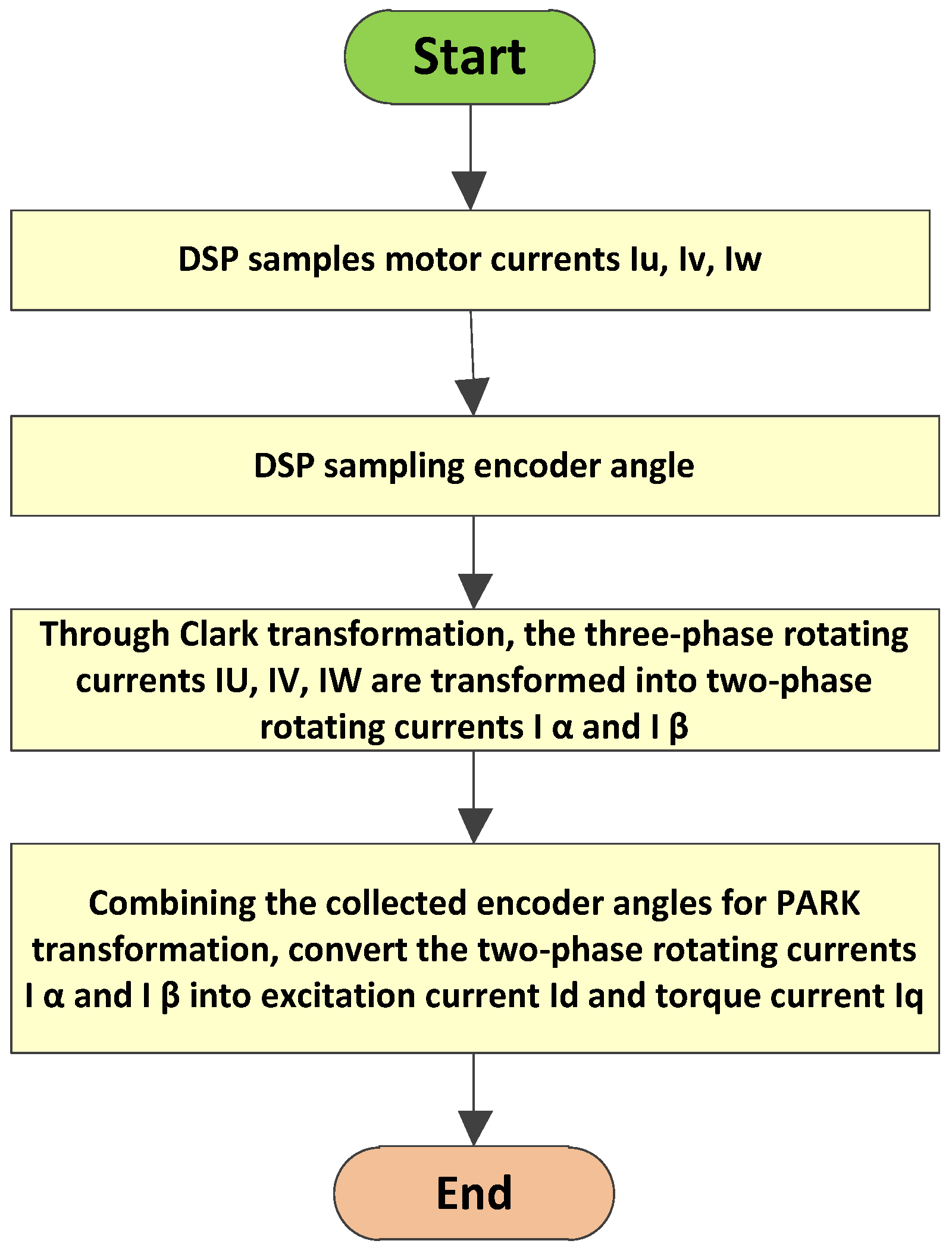
2.3. Control Framework
3. Collision Detection Dynamic Modeling
3.1. Kinematic Modeling
3.2. Dynamics Modeling
3.2.1. Jacobi Matrix
3.2.2. Robot Body Dynamics Modeling
4. Experiment
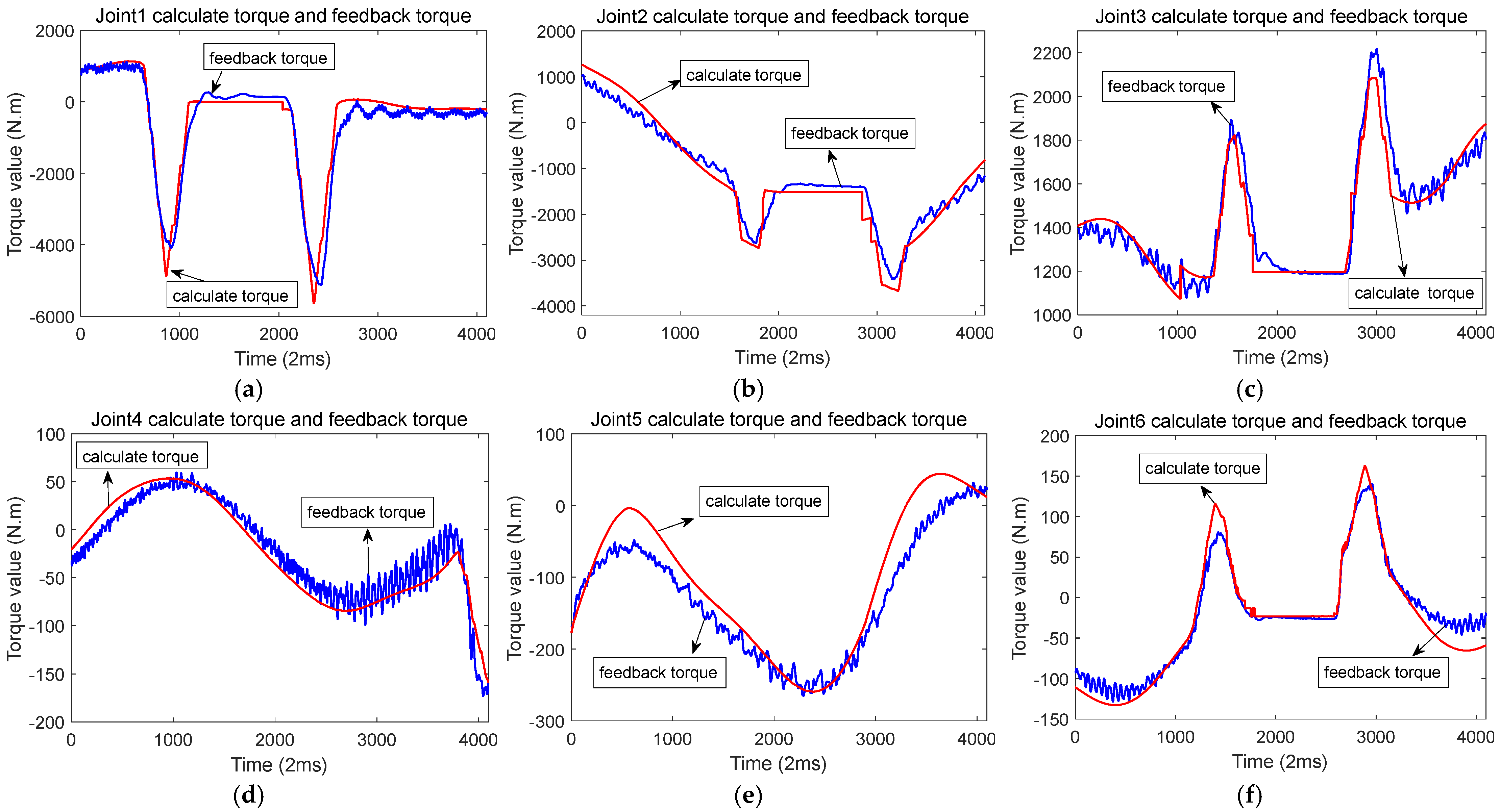
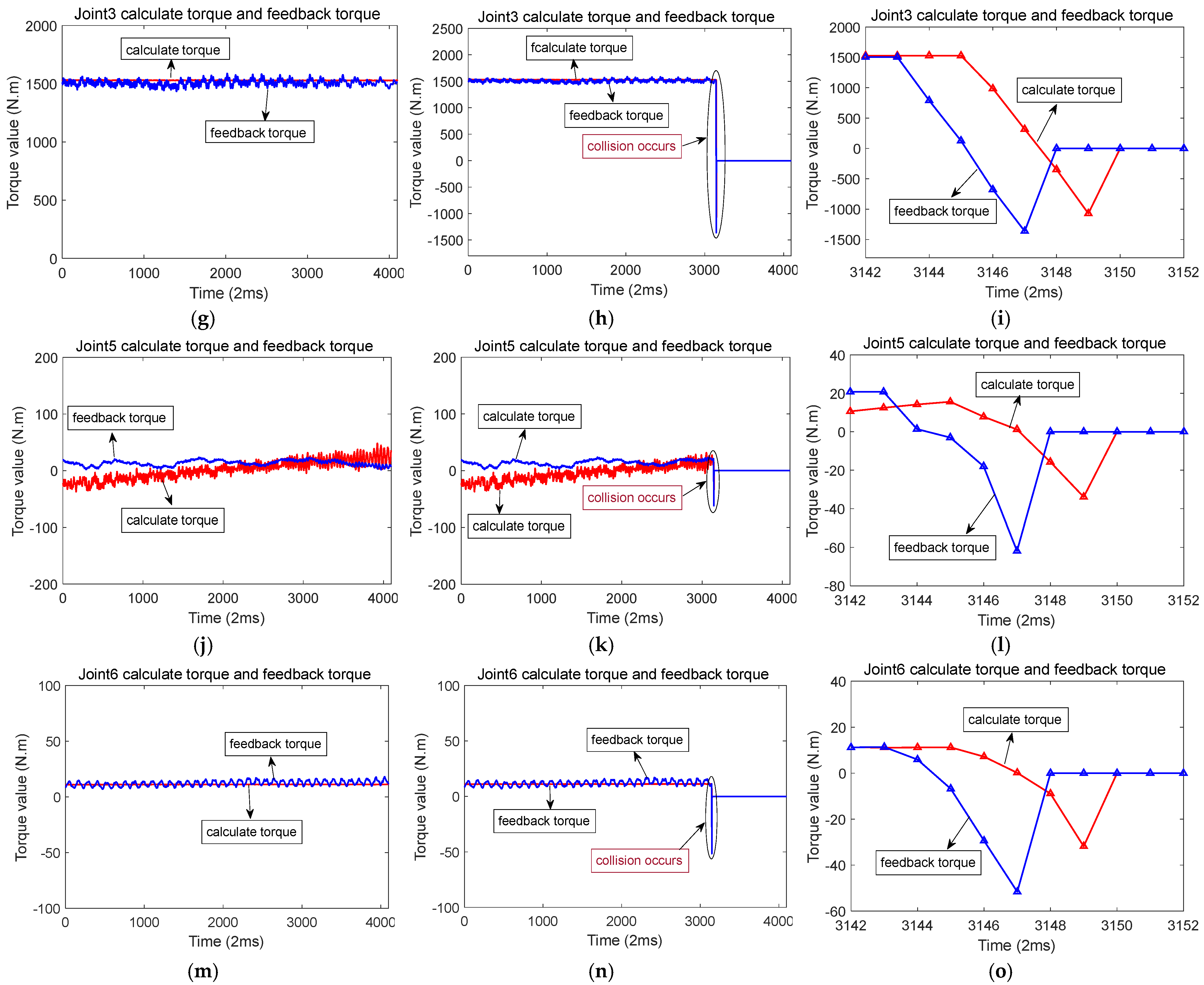
4.1. The Situation During Normal Operation
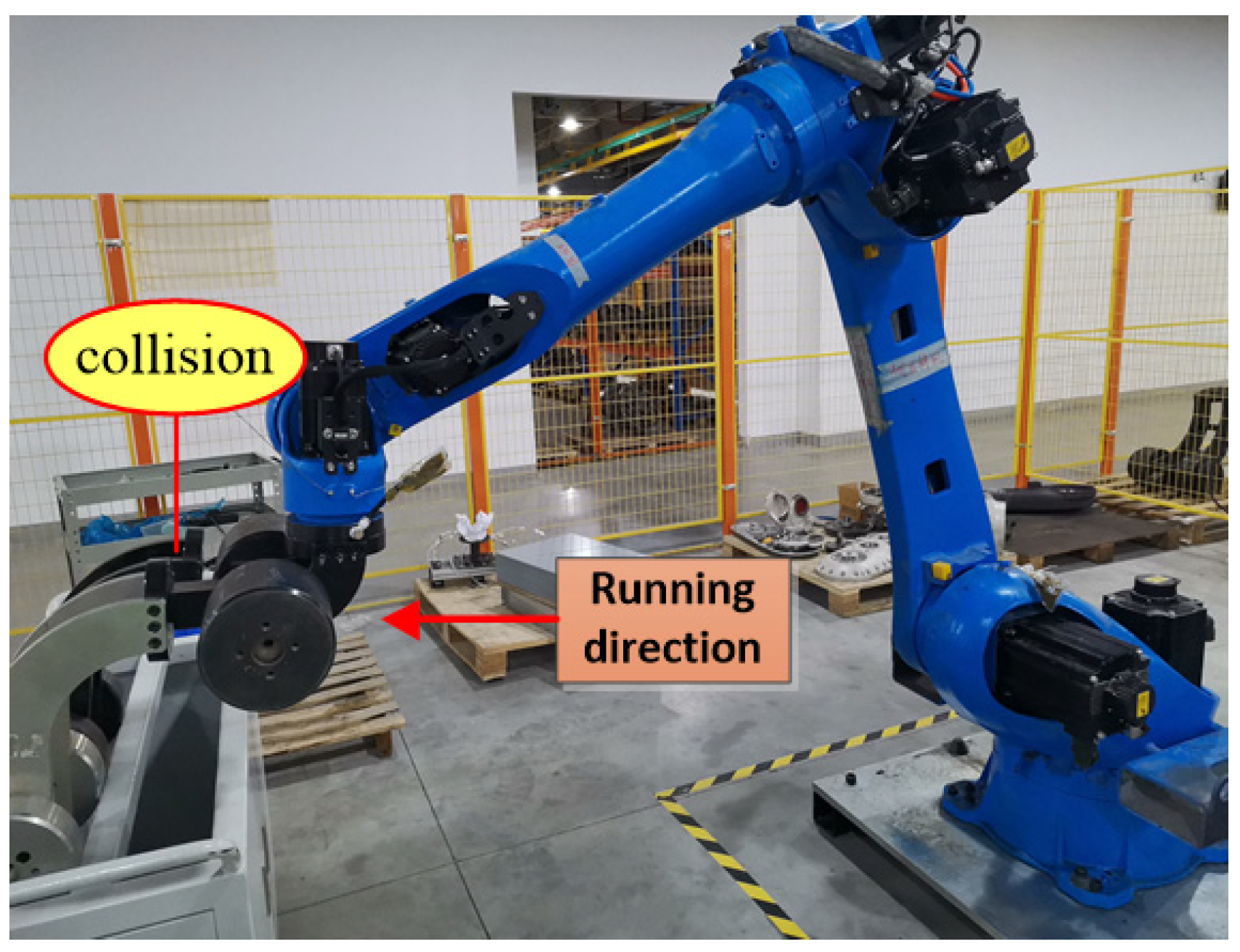
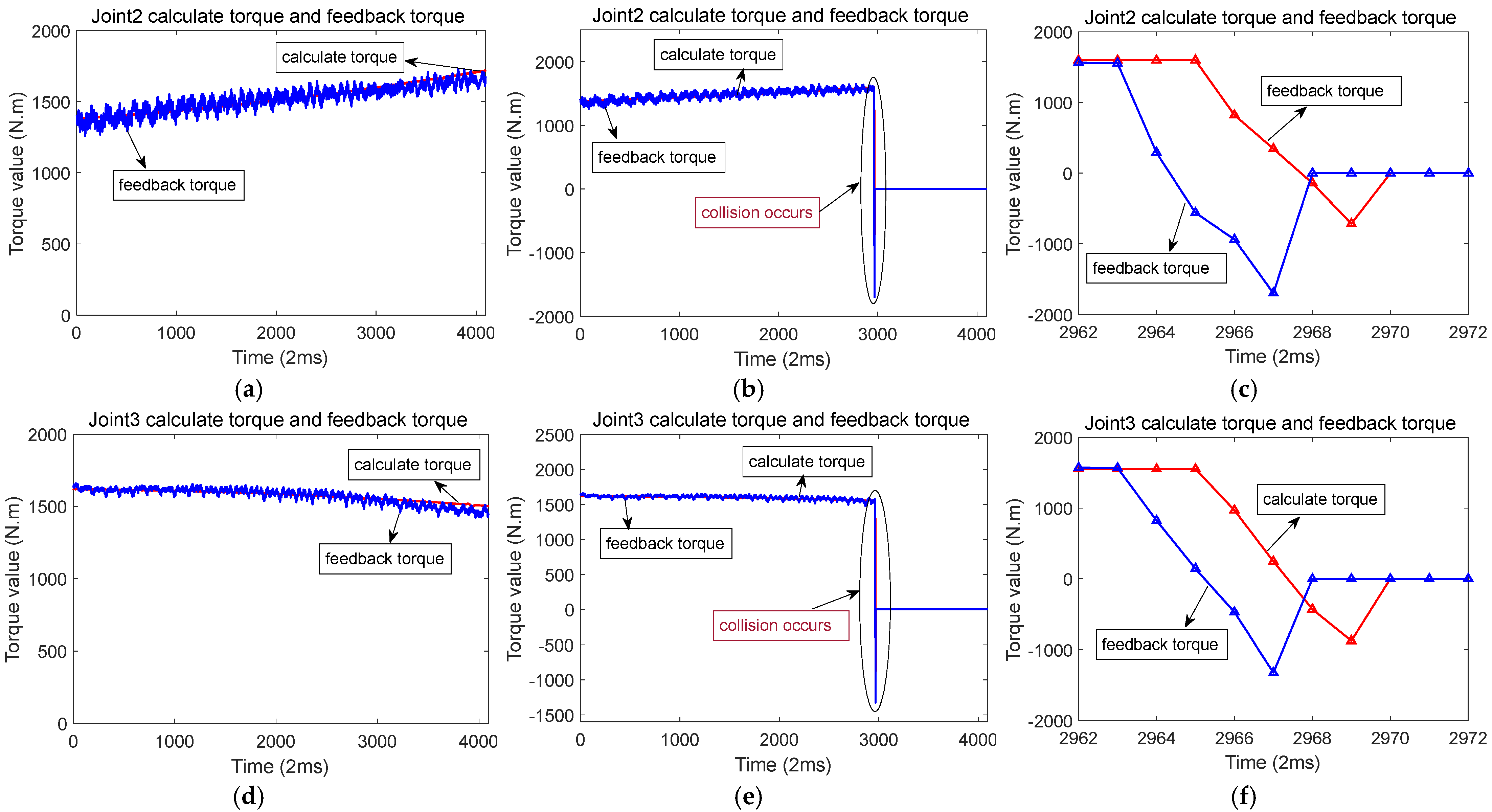
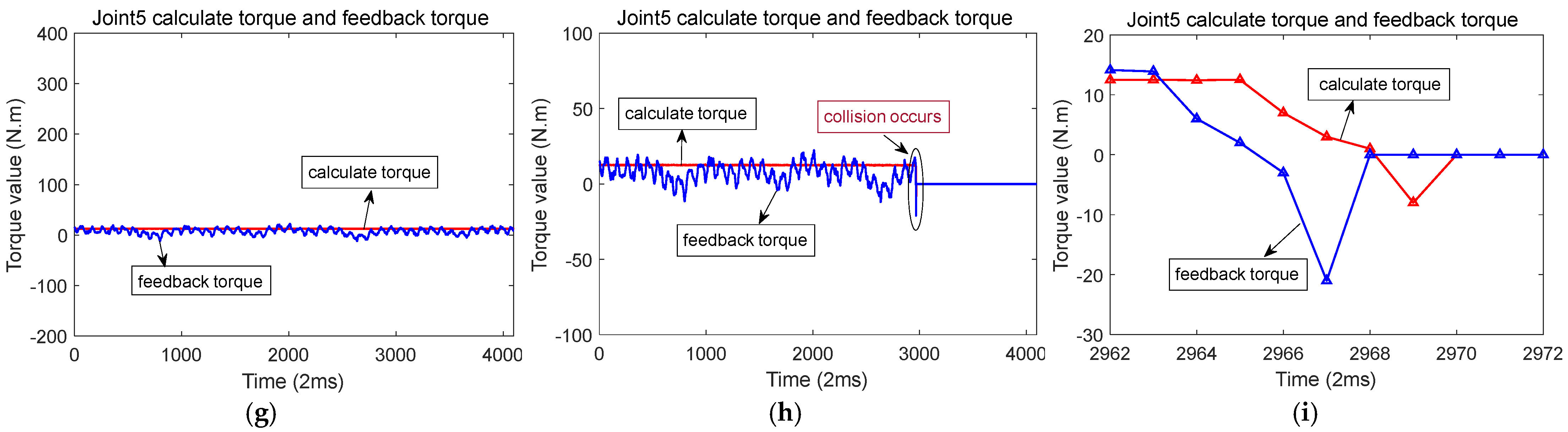
4.2. X-Axis Collision Experiment
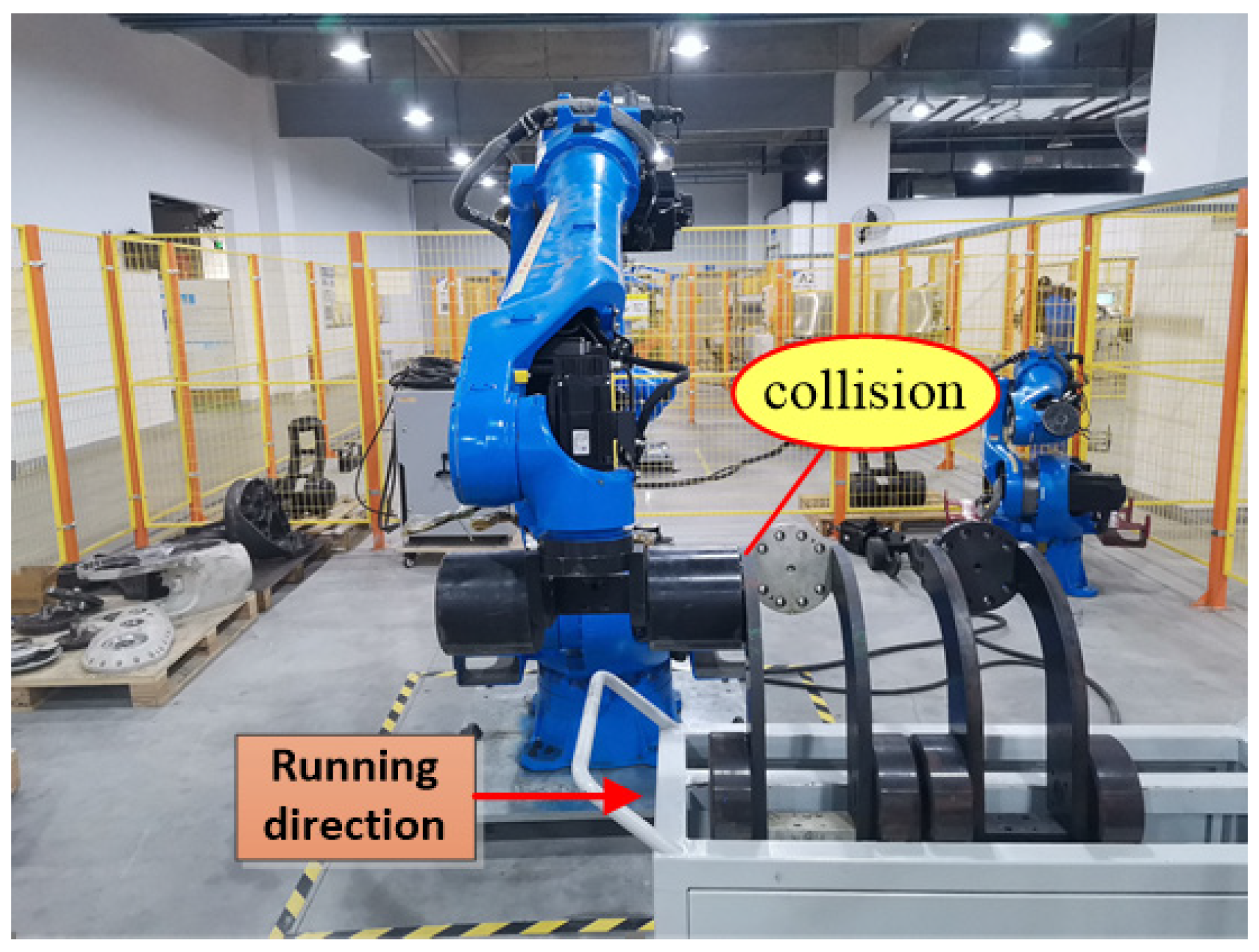
4.3. Y-Axis Collision Experiment
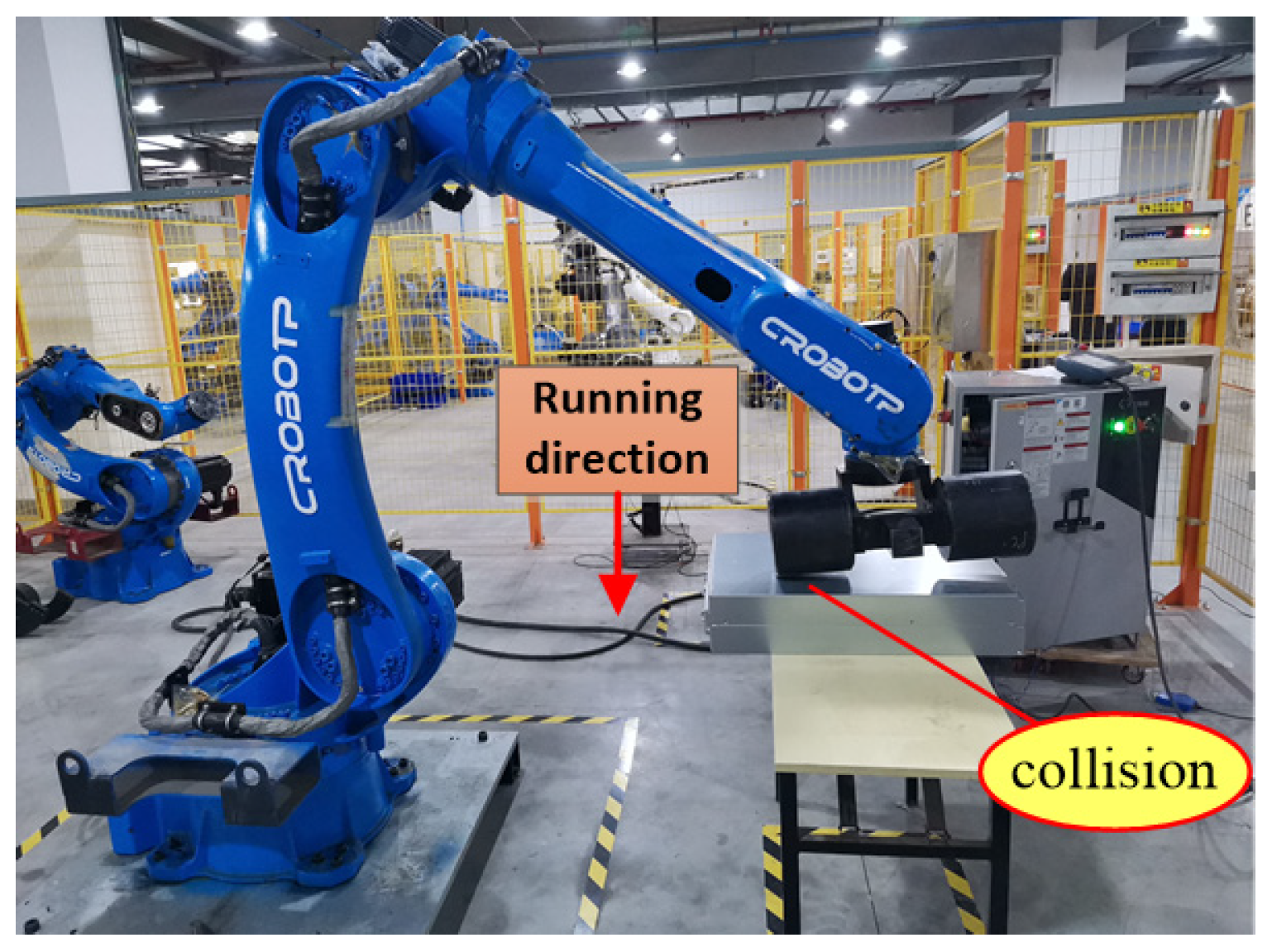
4.4. Z-Axis Collision Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Haddadin, S.; De Luca, A.; Albu-Schäffer, A. Robot collisions: A survey on detection, isolation, and identification. IEEE Trans. Robot. 2017, 33, 1292–1312. [Google Scholar] [CrossRef]
- Gordić, Z.; Jovanović, K. Collision detection on industrial robots in repetitive tasks using modified dynamic time warping. Robotica 2020, 38, 1717–1736. [Google Scholar] [CrossRef]
- Wan, M.; Liu, D.; Wu, J.; Li, L.; Peng, Z.; Liu, Z. State Estimation for Quadruped Robots on Non-Stationary Terrain via Invariant Extended Kalman Filter and Disturbance Observer. Sensors 2024, 24, 7290. [Google Scholar] [CrossRef]
- Flacco, F.; Kroeger, T.; De Luca, A.; Khatib, O. A depth space approach for evaluating distance to objects: With application to human-robot collision avoidance. J. Intell. Robot. Syst. 2015, 80, 7–22. [Google Scholar] [CrossRef]
- Sharkawy, A.N.; Koustoumpardis, P.N.; Aspragathos, N. Human–robot collisions detection for safe human–robot interaction using one multi-input–output neural network. Soft Comput. 2020, 24, 6687–6719. [Google Scholar] [CrossRef]
- Mronga, D.; Knobloch, T.; de Gea Fernández, J.; Kirchner, F. A constraint-based approach for human–robot collision avoidance. Adv. Robot. 2020, 34, 265–281. [Google Scholar] [CrossRef]
- Nguyen, V.; Case, J. Compensation of electrical current drift in human–robot collision. Int. J. Adv. Manuf. Technol. 2022, 123, 2783–2791. [Google Scholar] [CrossRef]
- Wang, Z.; Zhu, B.; Yang, Y.; Li, Z. Research on Identifying Robot Collision Points in Human–Robot Collaboration Based on Force Method Principle Solving Actuators. Actuators 2023, 12, 320. [Google Scholar] [CrossRef]
- Mamedov, S.; Mikhel, S. Practical aspects of model-based collision detection. Front. Robot. AI 2020, 7, 571574. [Google Scholar] [CrossRef] [PubMed]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; John Wiley & Sons: Hoboken, NJ, USA, 2008; pp. 14–214. [Google Scholar]
- Kong, M.; Yu, G. Collision detection algorithm for dual-robot system. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2083–2088. [Google Scholar]
- Ho, C.; Song, J.B. Collision detection algorithm robust to model uncertainty. Int. J. Control Autom. Syst. 2013, 11, 776–781. [Google Scholar] [CrossRef]
- Winkler, A.; Suchý, J. Dynamic collision avoidance of industrial cooperating robots using virtual force fields. IFAC Proc. Vol. 2012, 45, 265–270. [Google Scholar] [CrossRef]
- Kim, K.S.; Llado, T.; Sentis, L. Full-body collision detection and reaction with omnidirectional mobile platforms: A step towards safe human–robot interaction. Auton. Robot. 2016, 40, 325–341. [Google Scholar] [CrossRef]
- Diao, L.; Tang, J.; Loh, P.C.; Yin, S.; Wang, L.; Liu, Z. An efficient DSP–FPGA-based implementation of hybrid PWM for electric rail traction induction motor control. IEEE Trans. Power Electron. 2017, 33, 3276–3288. [Google Scholar] [CrossRef]
- Majumder, R.; Bag, G.; Velotto, G.; Marinopoulos, A. Closed loop simulation of communication and power network in a zone based system. Electr. Power Syst. Res. 2013, 95, 247–256. [Google Scholar] [CrossRef]
- Yuan, T.; Wang, D.; Wang, X.; Wang, X.; Sun, Z. High-precision servo control of industrial robot driven by PMSM-DTC utilizing composite active vectors. IEEE Access 2019, 7, 7577–7587. [Google Scholar] [CrossRef]
- Cho, K.; Kim, J.; Choi, S.B.; Oh, S. A high-precision motion control based on a periodic adaptive disturbance observer in a PMLSM. IEEE/ASME Trans. Mechatron. 2014, 20, 2158–2171. [Google Scholar] [CrossRef]
- Verrelli, C.M. Adaptive learning control design for robotic manipulators driven by permanent magnet synchronous motors. Int. J. Control 2011, 84, 1024–1030. [Google Scholar] [CrossRef]
- Khorashadizadeh, S.; Sadeghijaleh, M. Adaptive fuzzy tracking control of robot manipulators actuated by permanent magnet synchronous motors. Comput. Electr. Eng. 2018, 72, 100–111. [Google Scholar] [CrossRef]
- Luu, P.T.; Lee, J.Y.; Lee, J.H.; Park, J.W. Electromagnetic and thermal analysis of permanent-magnet synchronous motors for cooperative robot applications. IEEE Trans. Magn. 2020, 56, 7512804. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M. Adaptive dynamic sliding-mode control system using recurrent RBFN for high-performance induction motor servo drive. IEEE Trans. Ind. Inform. 2013, 9, 1922–1936. [Google Scholar] [CrossRef]
- Lakhimsetty, S.; Surulivel, N.; Somasekhar, V.T. Improvised SVPWM strategies for an enhanced performance for a four-level open-end winding induction motor drive. IEEE Trans. Ind. Electron. 2016, 64, 2750–2759. [Google Scholar] [CrossRef]
- Zhang, H.M.; Peh, L.S.; Wang, Y.H. Servo motor control system and method of auto-detection of types of servo motors. Appl. Mech. Mater. 2014, 496, 1510–1515. [Google Scholar] [CrossRef]
- Ali, A.W.A.; Razak, F.A.A.; Hayima, N. A review on the AC servo motor control systems. ELEKTRIKA-J. Electr. Eng. 2020, 19, 22–39. [Google Scholar]
- Lin, F.J.; Liu, C.W.; Wang, P.L. Voltage Control of IPMSM Servo Drive in Constant Power Region with Intelligent Parameter Estimation. IEEE Access 2022, 10, 99243–99256. [Google Scholar] [CrossRef]
- Guo, J.; Li, D.; He, B.; Ge, S.S. An Intelligent Collaborative System for Robot Dynamics. IEEE Trans. Cybern. 2023, 53, 6211–6221. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.X.; Meng, M. An efficient neural network approach to dynamic robot motion planning. Max Neural Netw. 2000, 13, 143–148. [Google Scholar] [CrossRef]
- Ge, L.; Chen, J.; Li, R.; Liang, P. Optimization design of drive system for industrial robots based on dynamic performance. Ind. Robot 2017, 44, 765–775. [Google Scholar] [CrossRef]
- Huynh, H.N.; Assadi, H.; Rivière-Lorphèvre, E.; Verlinden, O.; Ahmadi, K. Modelling the dynamics of industrial robots for milling operations. Robot. Comput.-Integr. Manuf. 2020, 61, 101852. [Google Scholar] [CrossRef]
- Zhang, C.; Li, S.; Zhang, Z. Industrial robot arm dynamic modeling simulation and variable-gain iterative learning control strategy design. J. Mech. Sci. Technol. 2024, 38, 3729–3739. [Google Scholar] [CrossRef]
- Cui, G.; Li, B.; Tian, W.; Liao, W.; Zhao, W. Dynamic modeling and vibration prediction of an industrial robot in manufacturing. Appl. Math. Model. 2022, 105, 114–136. [Google Scholar] [CrossRef]
- Yang, C.; Ma, H.; Fu, M.; Yang, C.; Ma, H.; Fu, M. Robot kinematics and dynamics modeling. In Advanced Technologies in Modern Robotic Applications; Springer: Singapore, 2016; pp. 27–48. [Google Scholar]
- Dhaouadi, R.; Hatab, A.A. Dynamic modelling of differential-drive mobile robots using lagrange and newton-euler methodologies: A unified framework. Adv. Robot. Autom. 2013, 2, 1000107. [Google Scholar]
- Reiter, A.; Müller, A.; Gattringer, H. On higher order inverse kinematics methods in time-optimal trajectory planning for kinematically redundant manipulators. IEEE Trans. Ind. Inform. 2018, 14, 1681–1690. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, Y.; Li, S. Tracking control of robot manipulators with unknown models: A jacobian-matrix-adaption method. IEEE Trans. Ind. Inform. 2017, 14, 3044–3053. [Google Scholar] [CrossRef]
- Di Natali, C.; Beccani, M.; Simaan, N.; Valdastri, P. Jacobian-based iterative method for magnetic localization in robotic capsule endoscopy. IEEE Trans. Robot. 2016, 32, 327–338. [Google Scholar] [CrossRef] [PubMed]
- Sousa, C.D.; Cortesao, R. Inertia tensor properties in robot dynamics identification: A linear matrix inequality approach. IEEE/ASME Trans. Mechatron. 2019, 24, 406–411. [Google Scholar] [CrossRef]
- Hahn, H.; Niebergall, M. Development of a measurement robot for identifying all inertia parameters of a rigid body in a single experiment. IEEE Trans. Control Syst. Technol. 2001, 9, 416–423. [Google Scholar] [CrossRef]
- Wahrburg, A.; Bös, J.; Listmann, K.D.; Dai, F.; Matthias, B.; Ding, H. Motor-current-based estimation of cartesian contact forces and torques for robotic manipulators and its application to force control. IEEE Trans. Autom. Sci. Eng. 2017, 15, 879–886. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, G.; Zhang, T.; Zhang, J.; Chen, R. Time-synchronized convergence control for n-DOF robotic manipulators with system uncertainties. Sensors 2024, 24, 5986. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot | Components Used for Collision Detection | Detection Mechanism | Processing Results |
|---|---|---|---|
| UR5(UR) | Dual encoder | Torque/current | Emergency stop |
| YuMi(ABB) | None | Current | Reverse turn |
| LBR iiwa(KUKA) | Dual encoder and Torque sensor | Torque | Reverse turn |
| CR-35iA(FANUC) | Torque sensor | Torque | Emergency stop |
| Coordinate System Transformation | Link | /mm | /m | ||
|---|---|---|---|---|---|
| Base–Link 1 | 1 | 0 | 0 | 0 | |
| Link 1–Link 2 | 2 | 90 | 320 | 0 | |
| Link 2–Link 3 | 3 | 0 | 1111 | 0 | |
| Link 3–Link 4 | 4 | 90 | 205 | 0 | |
| Link 4–Link 5 | 5 | −90 | 0 | 1232 | |
| Link 5–Link 6 | 6 | 90 | 0 | 169 |
| Name | Joint 1 | Joint 2 | Joint 3 | Joint 4 | Joint 5 | Joint 6 | Tool |
|---|---|---|---|---|---|---|---|
| Joint mass (kg) | 221.74 | 66.463 | 149.58 | 75.778 | 19.3 | 0 | 50 |
| Centroid coordinate X (m) | −0.14956 | −0.58 | −0.1364 | 0.00488 | 0.001234 | 0.1 | 0.25 |
| Centroid coordinate Y (m) | −0.0663 | −0.00008 | −0.013851 | −0.4611 | 0.0009 | 0 | 0.001 |
| Centroid coordinate Z (m) | kg·m2 | 0.1198 | 0.046264 | −0.0514 | 0.0593 | 0.18 | 0.18 |
| (kg·m2) | 5.0181 | 0.62859 | 2.6286 | 7.2478 | 0.1718 | 5 | 0.01 |
| (kg·m2) | 10.079 | 11.092 | 3.1253 | 7.0028 | 0.08182 | 5 | 0.01 |
| (kg·m2) | 11.056 | 0.62859 | 2.6286 | 7.2478 | 0.1718 | 3 | 0.01 |
| (kg·m2) | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| (kg·m2) | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| (kg·m2) | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| (kg·m2) | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Motor Rated torque (N·m) | 26.3 | 26.3 | 14.33 | 4.8 | 4.8 | 3.18 | 0 |
| Motor rated current (A) | 24 | 24 | 7.6 | 4.8 | 4.8 | 3.5 | 0 |
| Reduction ratio | 210 | 219.46 | 145 | 133.59 | 157.33 | 105 | 1 |
| Coulomb friction force (N·m) | 220 | 574.45 | 250 | 40 | 97.837 | 33.687 | 0 |
| Kinetic friction coefficient | 530 | 874.53 | 250 | 80 | 55.84 | 27.4 | 0 |
| Threshold (%) | Success Rate (%) | False Alarm Rate (%) | Miss Rate (%) |
|---|---|---|---|
| 105 | 100 | 20 | 0 |
| 110 | 100 | 2 | 0 |
| 115 | 100 | 0 | 0 |
| 120 | 100 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, Q.; Chen, C.; Jiang, Y. Servo Collision Detection Control System Based on Robot Dynamics. Sensors 2025, 25, 1131. https://doi.org/10.3390/s25041131
Xiang Q, Chen C, Jiang Y. Servo Collision Detection Control System Based on Robot Dynamics. Sensors. 2025; 25(4):1131. https://doi.org/10.3390/s25041131
Chicago/Turabian StyleXiang, Qinjian, Chao Chen, and Yadong Jiang. 2025. "Servo Collision Detection Control System Based on Robot Dynamics" Sensors 25, no. 4: 1131. https://doi.org/10.3390/s25041131
APA StyleXiang, Q., Chen, C., & Jiang, Y. (2025). Servo Collision Detection Control System Based on Robot Dynamics. Sensors, 25(4), 1131. https://doi.org/10.3390/s25041131