
A Diagnosis Method for Noise and Intermittent Faults in Analog Circuits Based on the Fusion of Multiscale Fuzzy Entropy Features and Amplitude Features

Abstract
1. Introduction
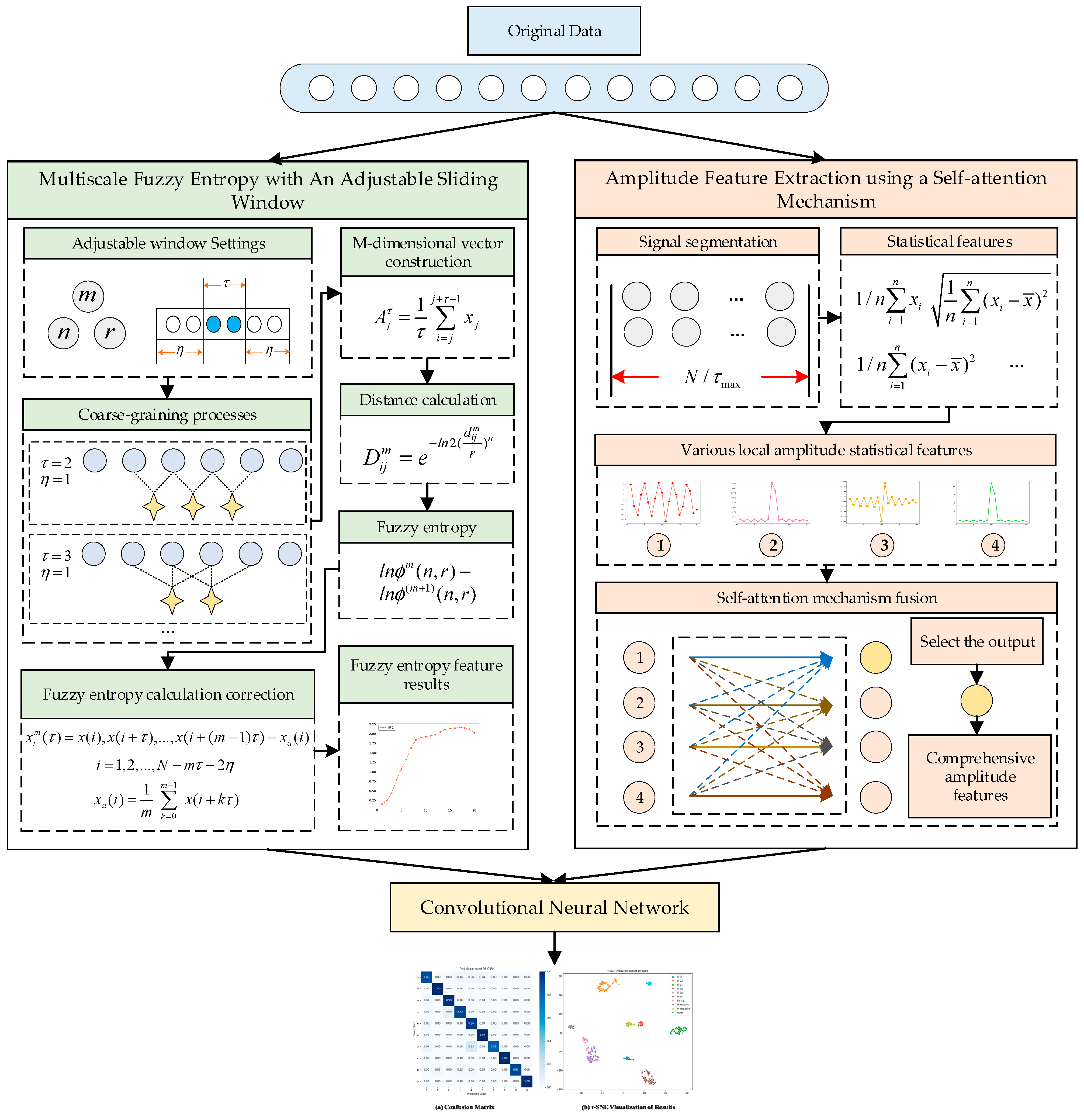
- A novel fault diagnosis method based on the fusion of multiscale fuzzy entropy features and amplitude features is proposed. Multiscale fuzzy entropy features are derived through a novel signal coarse-graining and fuzzy entropy calculations. A self-attention mechanism is employed to fuse multiple statistical characteristics of signals into comprehensive amplitude features. The proposed method integrates these features using a convolutional neural network to enhance diagnosis accuracy, achieving precise classification of noise and intermittent faults occurring at different locations.
- For multiscale fuzzy entropy feature extraction, a multiscale fuzzy entropy calculation method with an adjustable sliding window is proposed. By adjusting the window size, normal data are excluded to offset the downward influence of normal data on fuzzy entropy calculations for intermittent faults. The process adopts a point-by-point sliding strategy, increasing the iterations to address the issue of information loss in short time sequences.
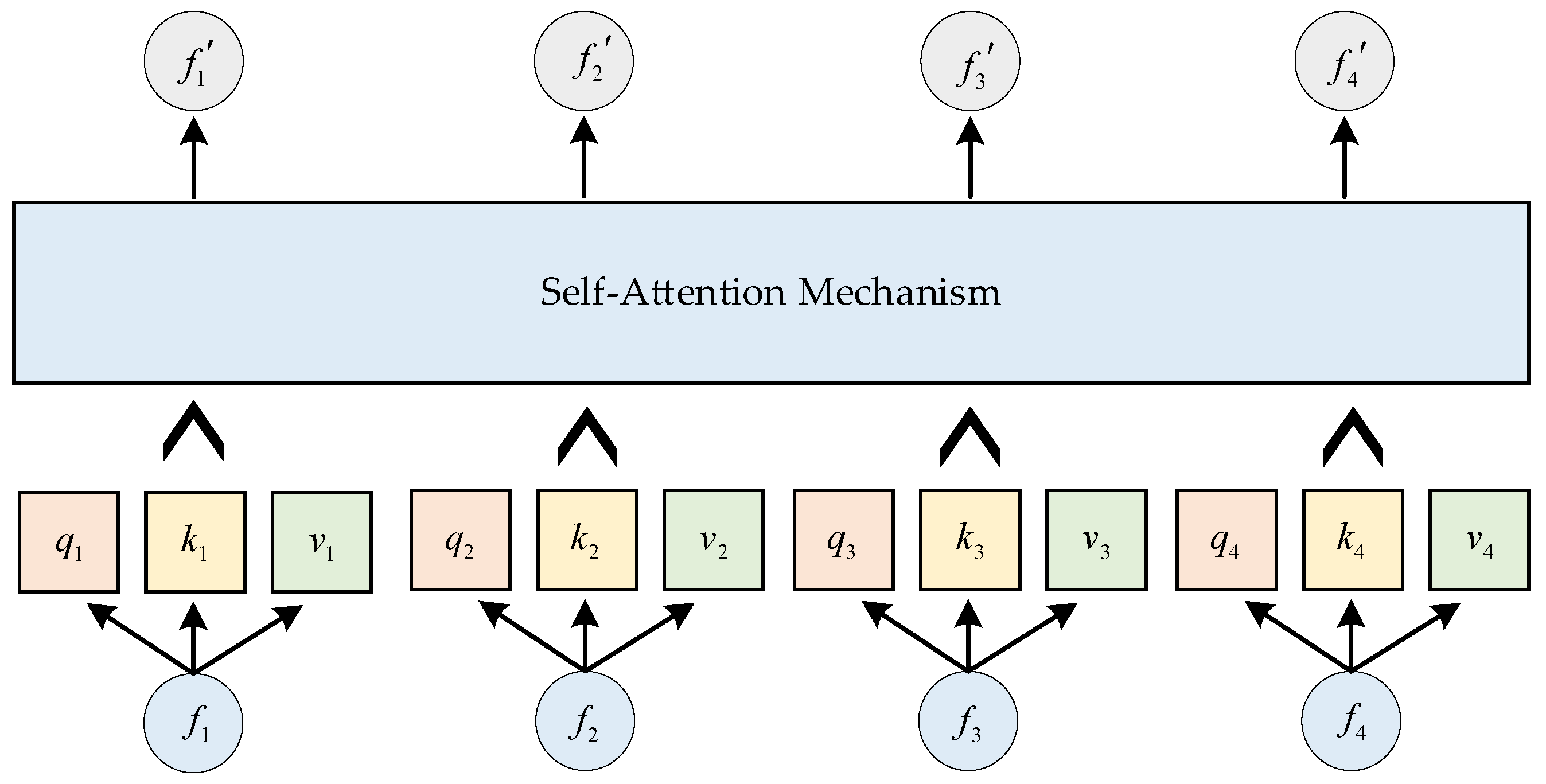
- For amplitude feature extraction, a method based on self-attention mechanism fusion is proposed. The original signal is segmented, and features such as mean, interquartile range, Variance, and root mean square are calculated for each segment, transforming the signal into four statistical features. The self-attention mechanism fuses these statistical features into a comprehensive amplitude feature, capturing amplitude characteristics more effectively than single statistical features.
2. Preliminaries
2.1. Multiscale Fuzzy Entropy
- (1)
- For a time series consisting of data points, a vector sequence of dimension can be constructed within time , expressed as follows:Here, represents the mean of , expressed as follows:
- (2)
- For the vector sequence , the distance between two vectors and is defined as the maximum absolute difference in their corresponding scalar components.
- (3)
- The similarity between and is measured using an exponential function, expressed as follows:where and represent the gradient and width of the boundary, respectively.
- (4)
- Define , expressed as follows:
- (5)
- Increase the dimension to , calculate the distance between and , and compute the corresponding similarity .
- (6)
- Calculate , expressed as follows:
- (7)
- Compute the fuzzy entropy of the time series , expressed as follows:If is finite, can also be expressed as follows:
- (8)
- After determining the scale factor , the original time series is divided into several non-overlapping windows of length (where is a positive integer). The average value within each window is calculated, forming a new data point. The sequence of these averages creates a coarse-grained time series , expressed as follows:
- (9)
- For each coarse-grained time series , calculate the corresponding fuzzy entropy and plot it as a function of the scale factor .
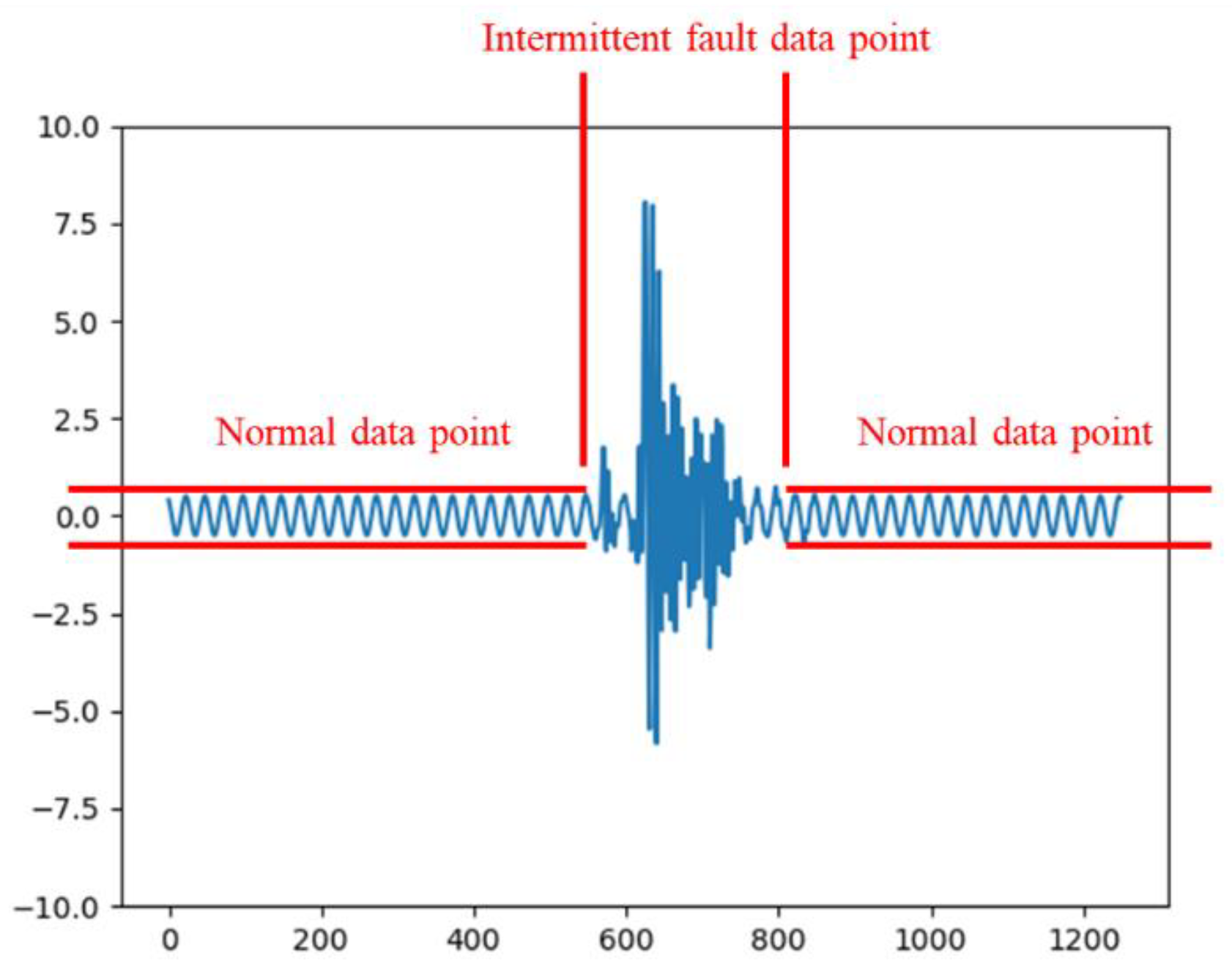
2.2. Application Issues of Fuzzy Entropy in Intermittent Fault Diagnosis
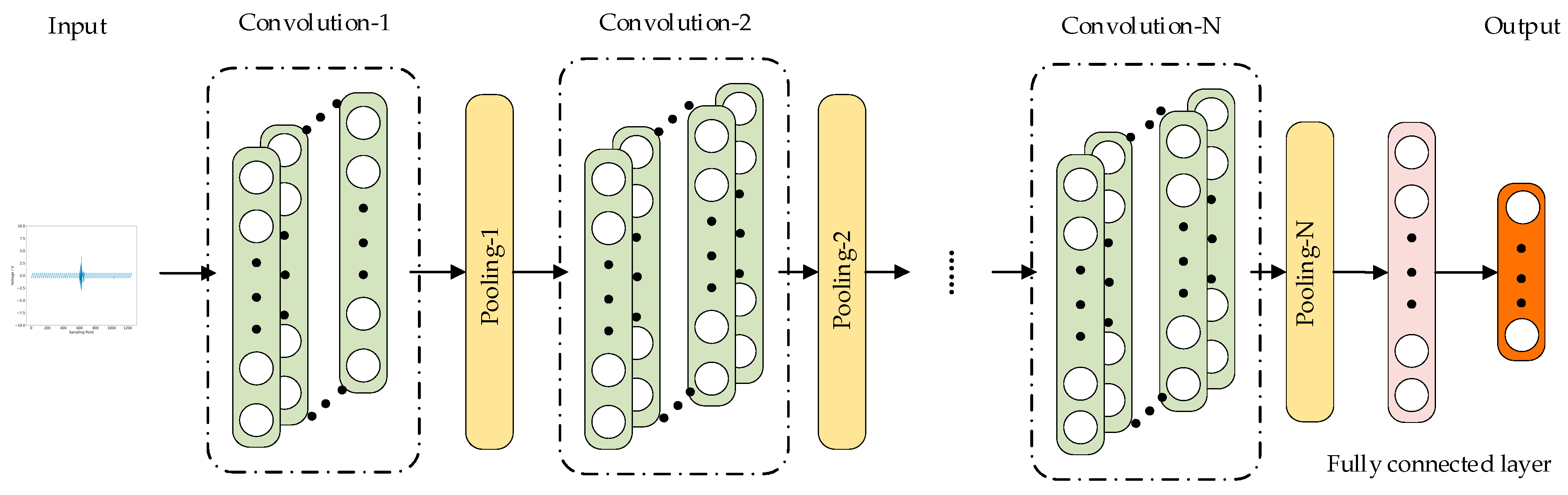
2.3. Convolutional Neural Networks
2.4. Self-Attention Mechanism
3. Proposed Method
3.1. Structure of Intermittent Fault Diagnosis Method
3.2. Multiscale Fuzzy Entropy with Adjustable Sliding Window
- (1)
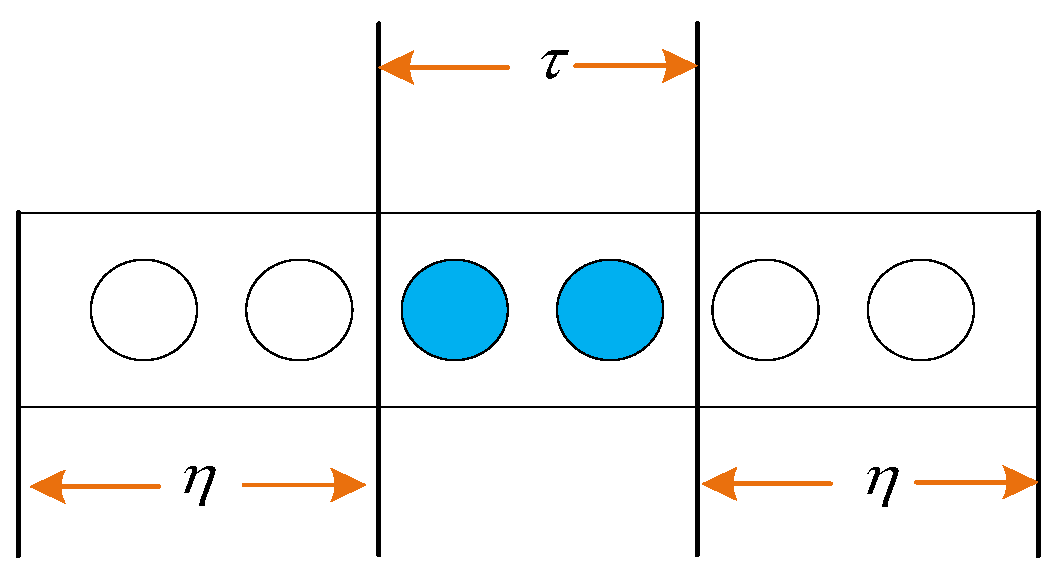
- Determine the adjustable sliding window, as shown in Figure 5. The adjustable sliding window consists of a regulation module and a scale module. The regulation module, with a length of , determines the length of data to be excluded from entropy calculation, thereby reducing the influence of normal waveform data on the entropy calculation of intermittent faults. The scale module, with a length of , performs the coarse-graining process.
- (2)
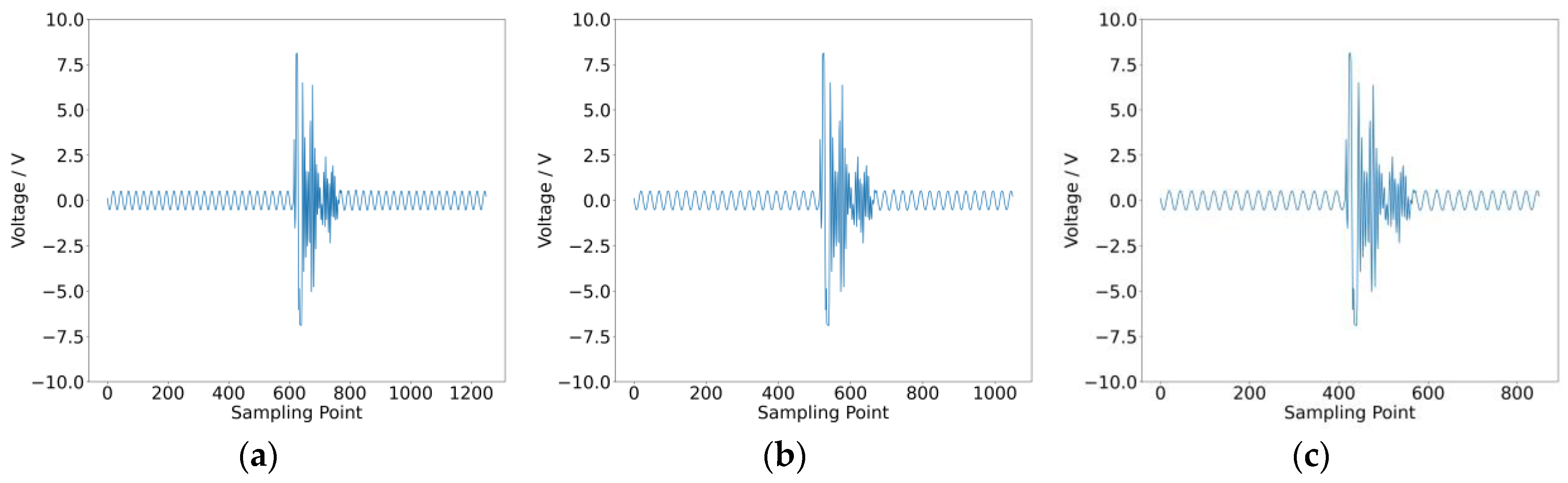
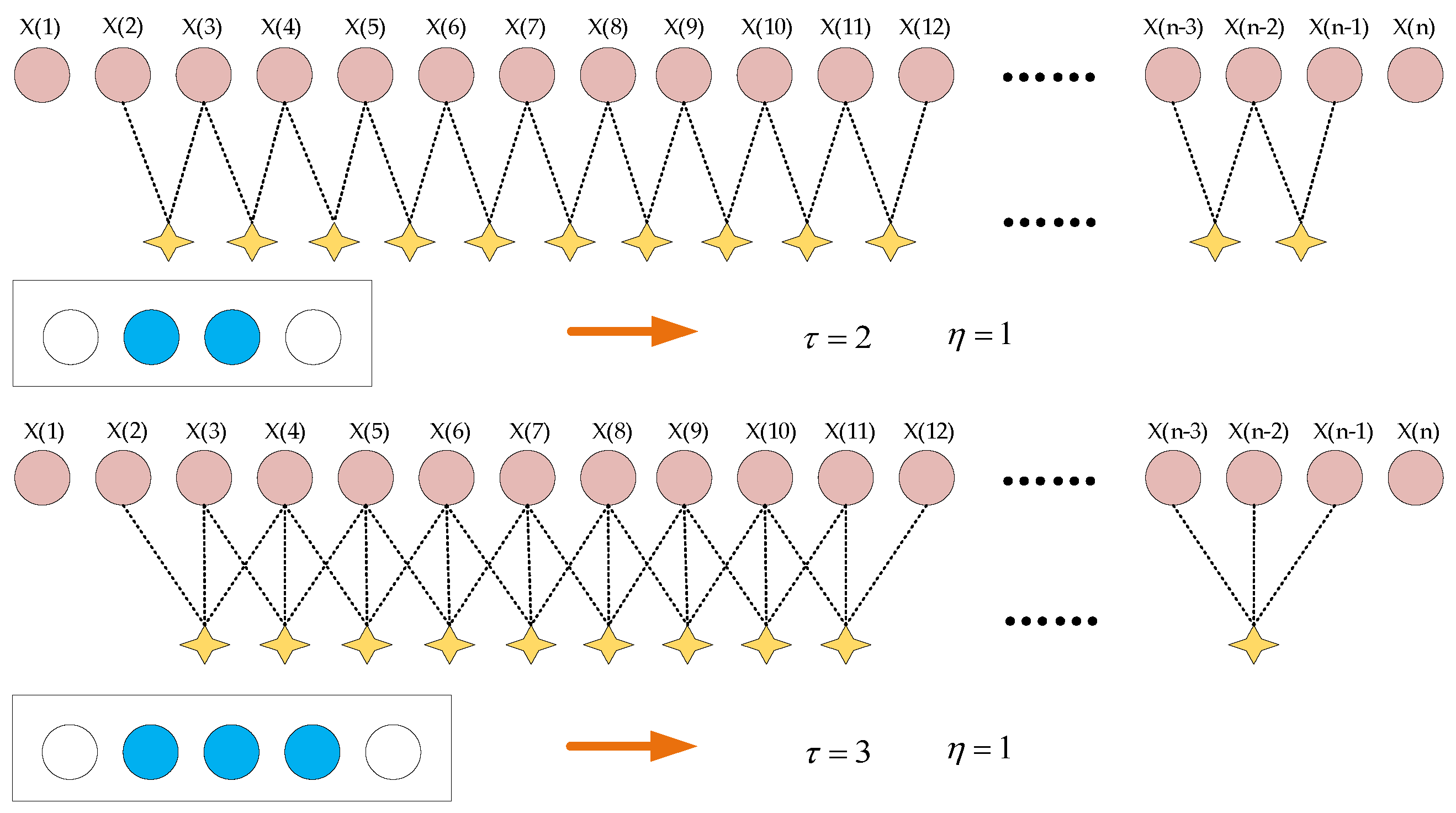
- Perform coarse-graining on the original time series. As shown in Figure 6, for each scale factor , the predefined adjustable sliding window begins sliding from the first data point, with a step size of 1. During sliding, data points excluded by the regulation module of length are ignored, and the average of data points is calculated to form a new data point. This process generates a coarse-grained time series.where and represent the length of the original time series and the scaling factor, respectively; and is the length of the regulation module. Using Equation (15), the original time series is divided into a coarse-grained vector sequence , with a length of .
- (3)
- For the newly constructed vector sequence , fuzzy entropy can be computed. At this stage, the original fuzzy entropy formula is modified based on the correction strategy referenced in [17]. The correction introduces the scaling factor to account for time delays. For a time series with data points, a vector sequence of dimension mmm can be constructed at time , expressed as follows:
3.3. Parameter Determination
3.4. Amplitude Feature Extraction Using Self-Attention Mechanism
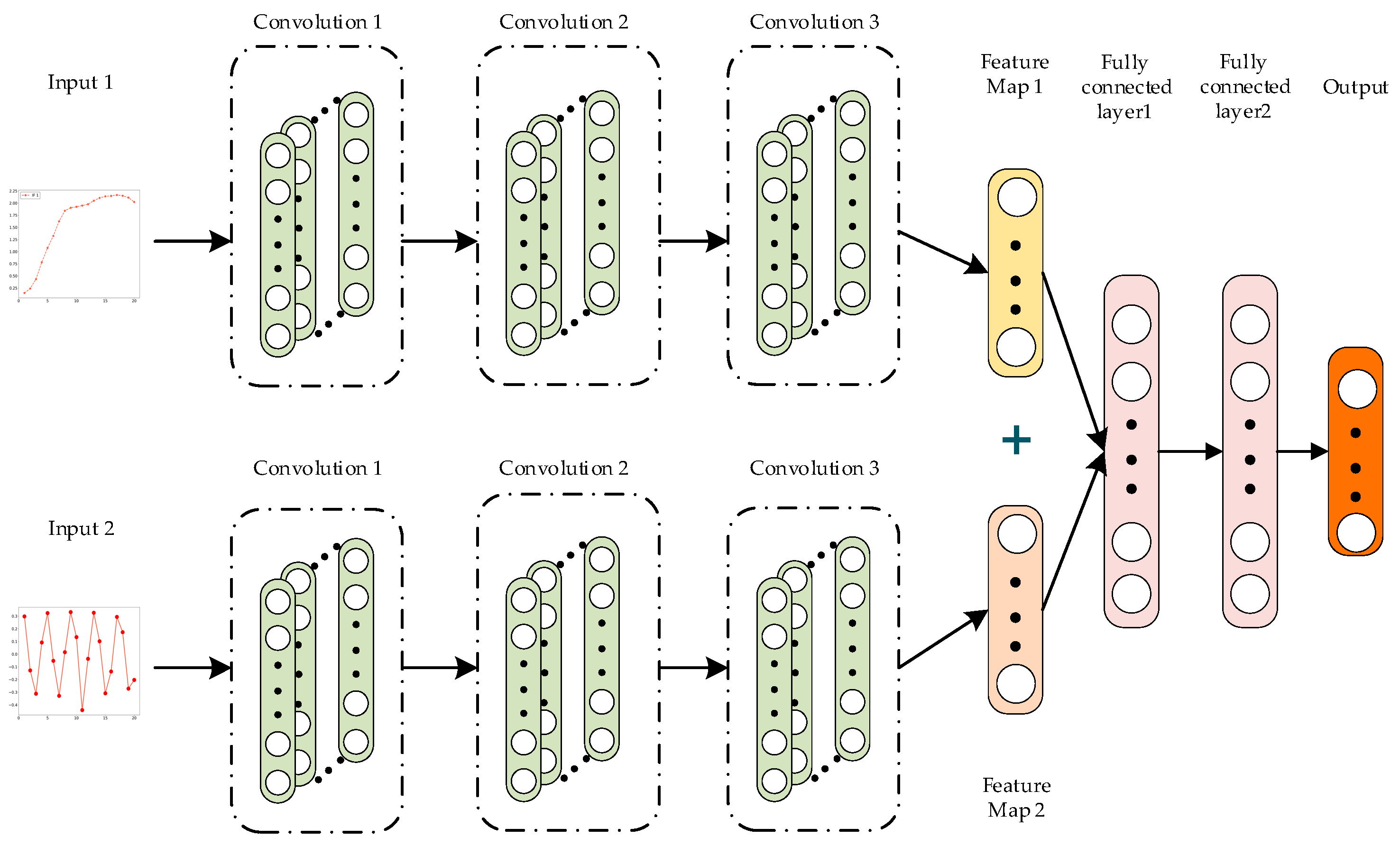
3.5. The Convolutional Neural Network Structure in the Proposed Method
4. Experiment Results and Comparison
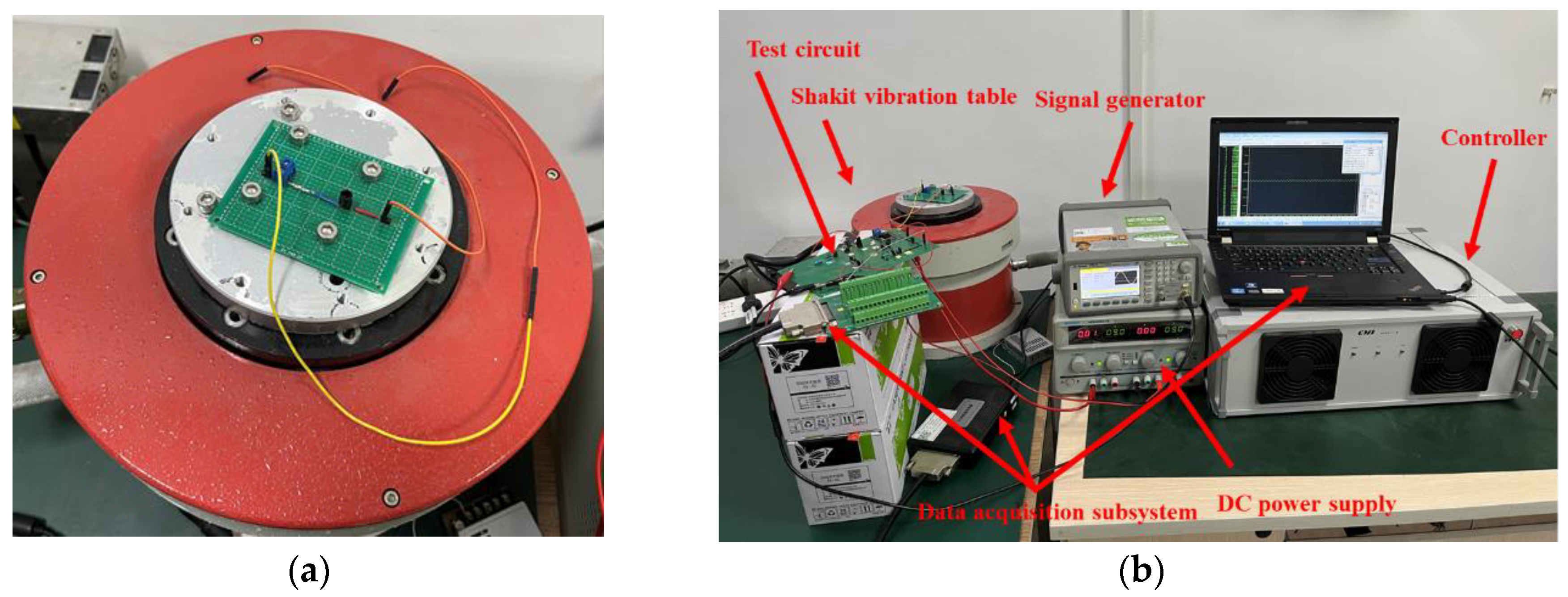
4.1. Experimental Circuit Setup
- (1)
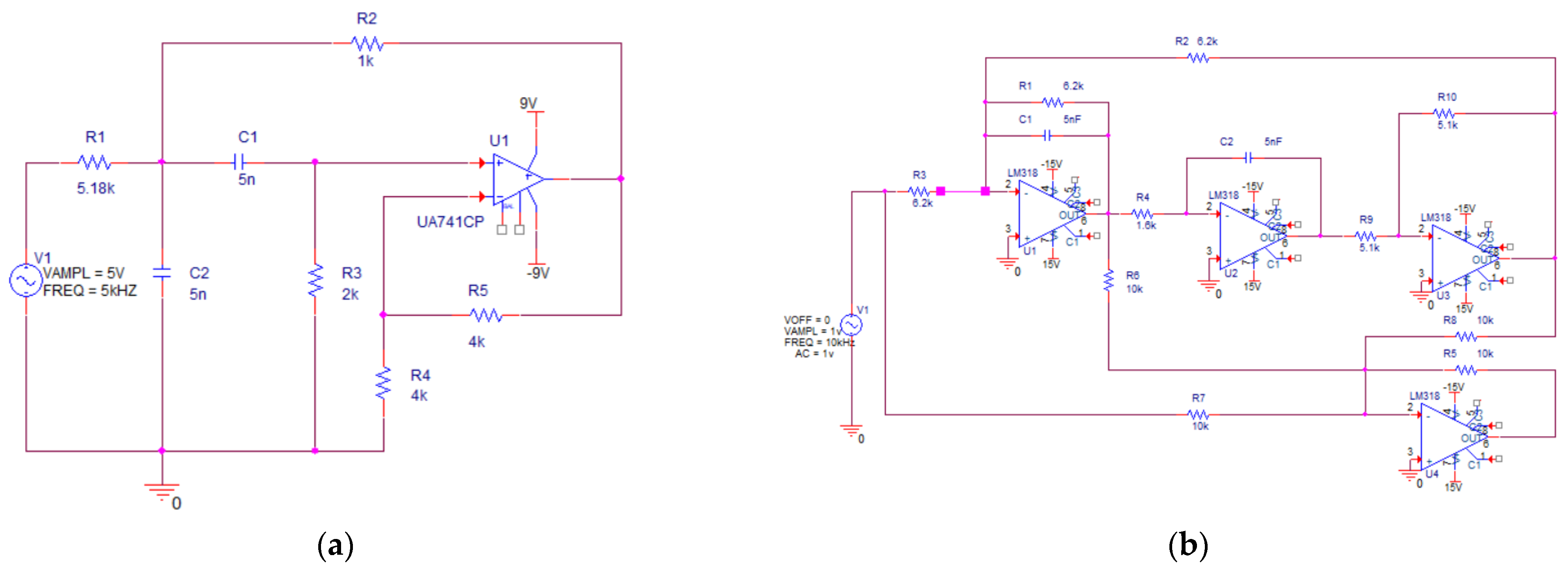
- Case 1—Sallen–Key bandpass filter circuit
- (2)
- Case 2—Quad operational amplifier dual-fourth-order high-pass filter circuit
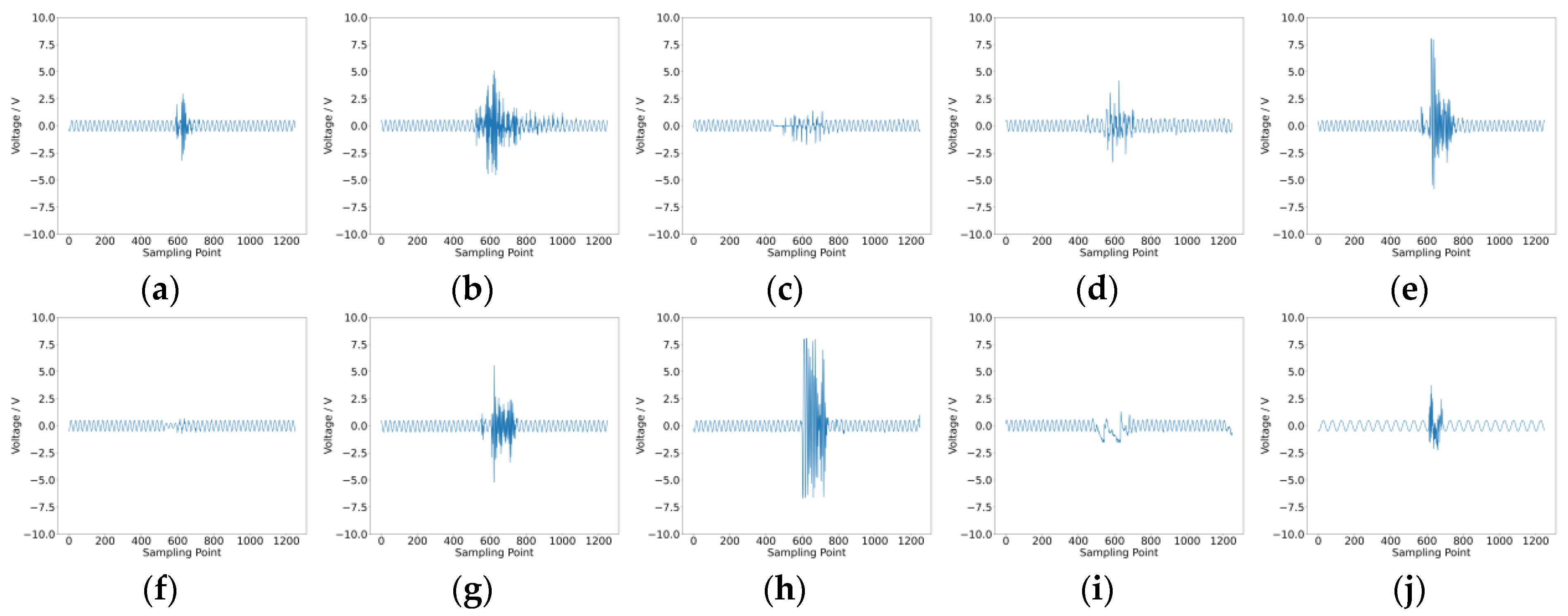
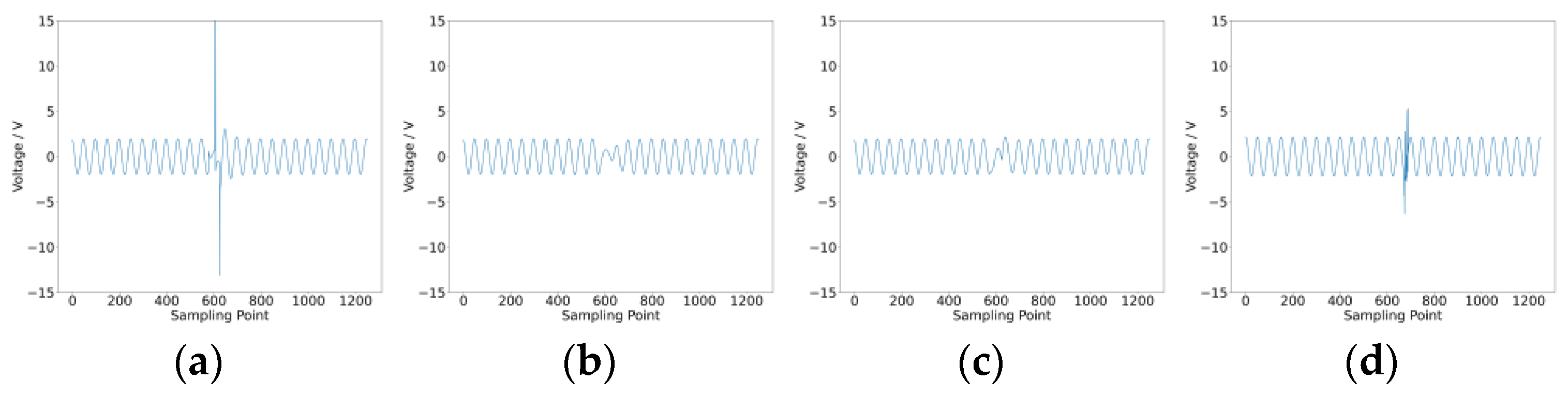
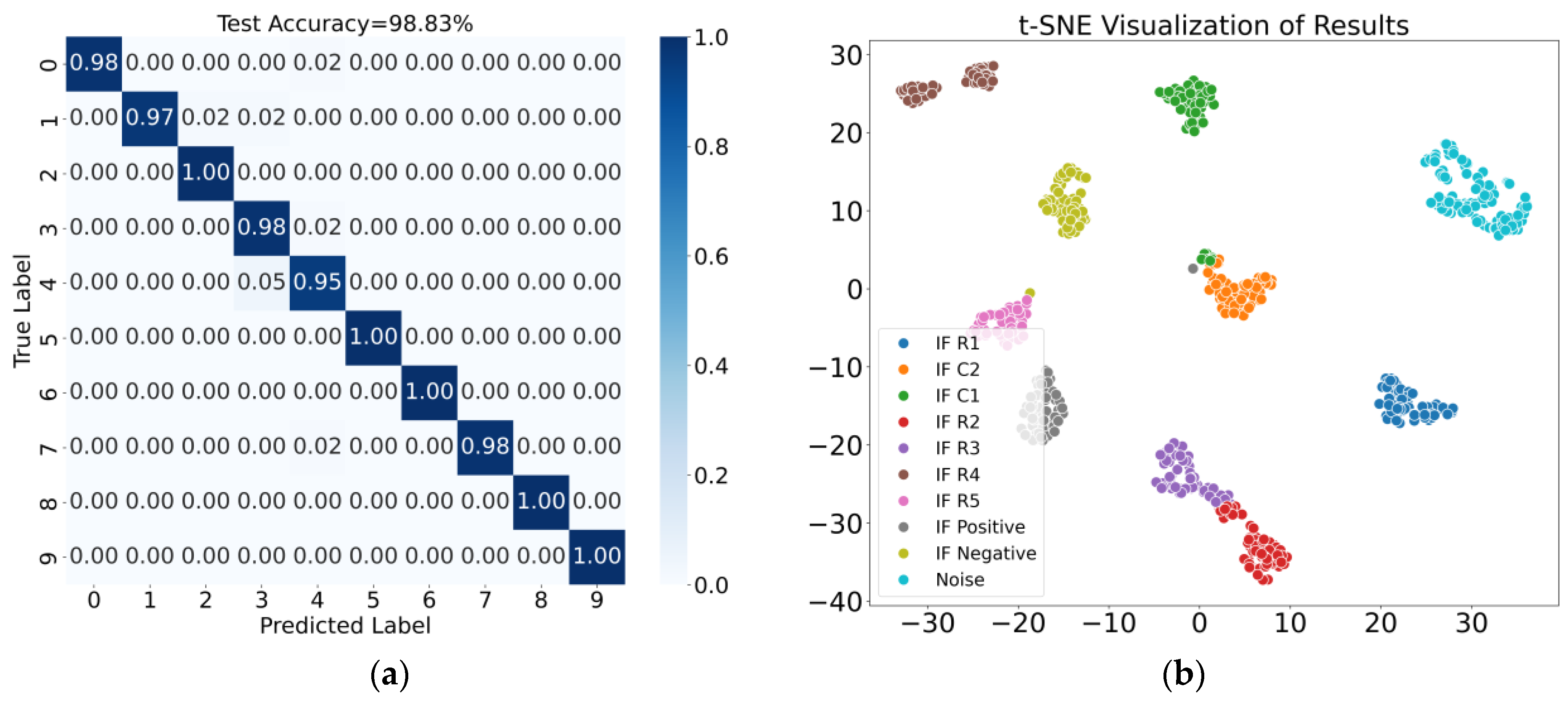
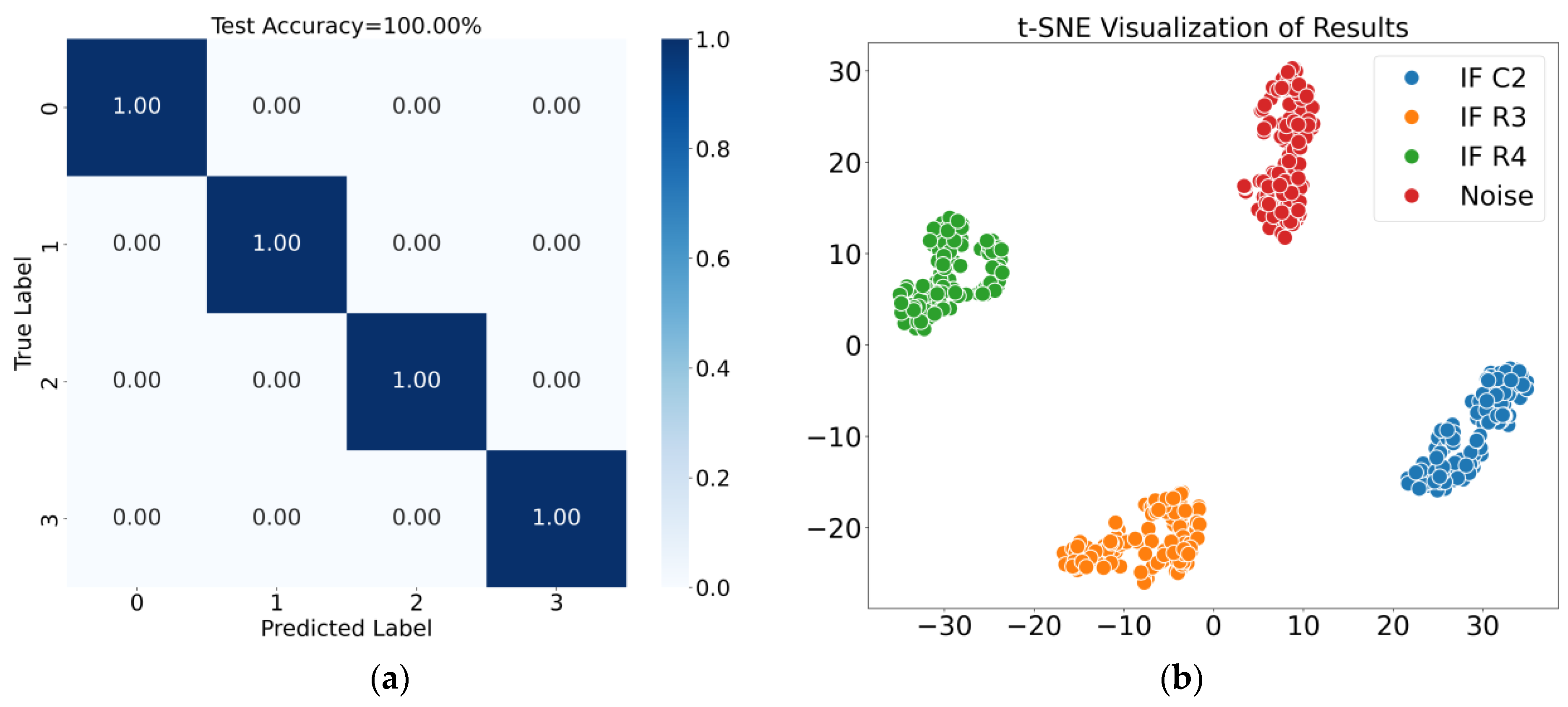
4.2. Waveform Data and Diagnostic Results
4.3. Effectiveness of Multiscale Fuzzy Entropy Features with Adjustable Sliding Window
4.4. Effectiveness of Amplitude Feature Extraction Using Self-Attention Mechanism
- (1)
- Comparison with single amplitude features
- (2)
- Comparison of various comprehensive amplitude features
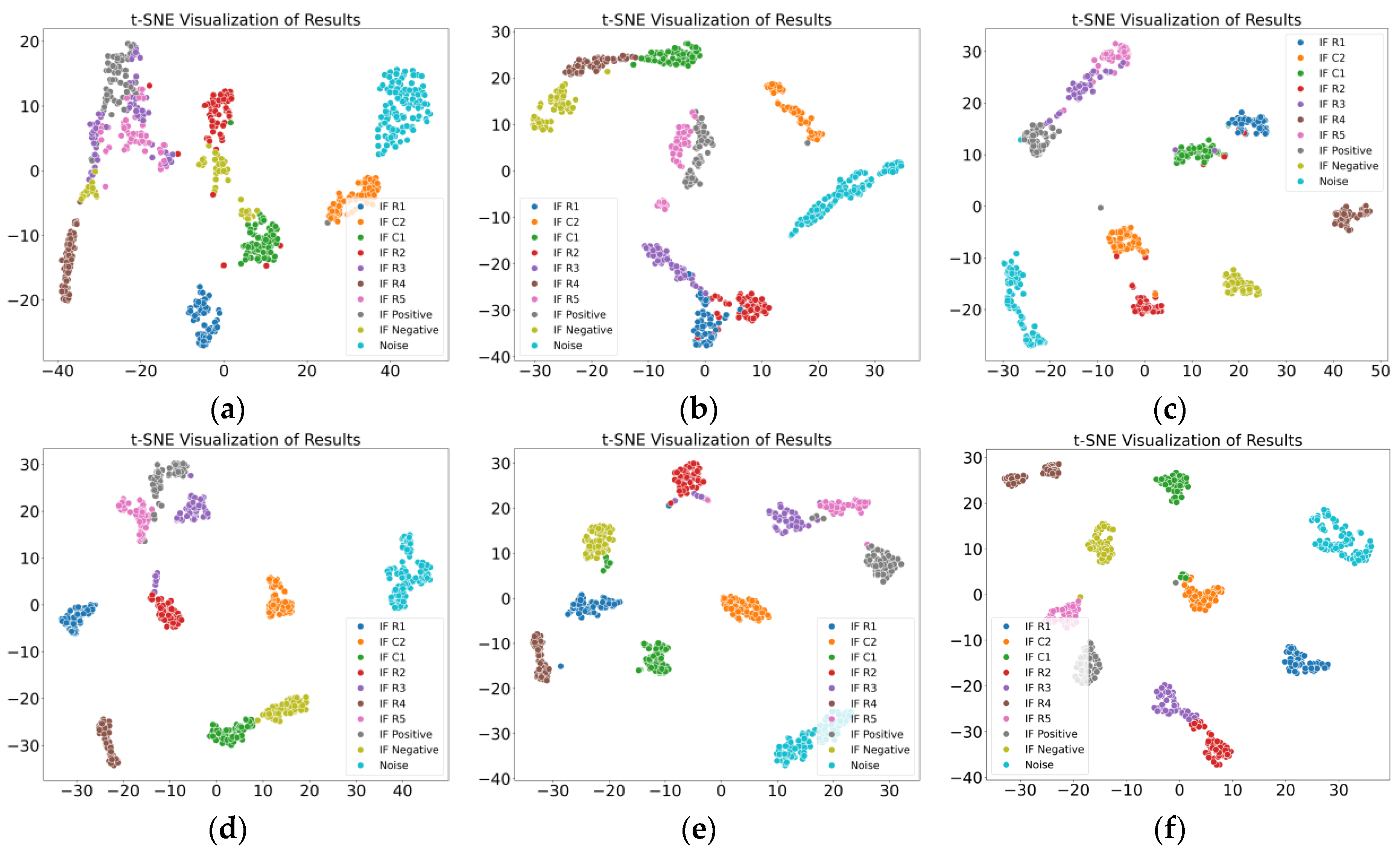
4.5. Effectiveness of Feature Fusion
4.6. Comparison with Other State-of-the-Art Methods
5. Conclusions
- The experimental results indicate that the proposed method effectively extracts fuzzy entropy features and amplitude features. The multiscale fuzzy entropy features measure the regularity of the signal, and the amplitude features can compensate for the shortcoming of ignoring the change in signal amplitude during the calculation of the entropy features. The fusion of these two features effectively improves the diagnostic accuracy.
- The multiscale fuzzy entropy calculation method, based on an adjustable sliding window, eliminates normal data points, reducing their negative impact on fuzzy entropy calculations. The point-by-point sliding strategy also mitigates the issue of signal loss, thereby enhancing the classification capability of fuzzy entropy.
- The amplitude feature extraction method, based on a self-attention mechanism, integrates multiple amplitude features of the signal. Compared to single statistical features, the integration of comprehensive features from multiple statistical perspectives better reflects the amplitude characteristics of the signal, resulting in superior classification performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhong, T.; Qu, J.; Fang, X.; Li, H.; Wang, Z. The Intermittent Fault Diagnosis of Analog Circuits Based on EEMD-DBN. Neurocomputing 2021, 436, 74–91. [Google Scholar] [CrossRef]
- Zhou, D.; Zhao, Y.; Wang, Z.; He, X.; Gao, M. Review on Diagnosis Techniques for Intermittent Faults in Dynamic Systems. IEEE Trans. Ind. Electron. 2020, 67, 2337–2347. [Google Scholar] [CrossRef]
- Shen, Q.; Lv, K.; Liu, G.; Qiu, J. Dynamic Performance of Electrical Connector Contact Resistance and Intermittent Fault under Vibration. IEEE Trans. Compon. Packag. Manuf. Technol. 2018, 8, 216–225. [Google Scholar] [CrossRef]
- Jia, Z.; Wang, S.D.; Zhao, K.; Li, Z.; Yang, Q.; Liu, Z. An Efficient Diagnostic Strategy for Intermittent Faults in Electronic Circuit Systems by Enhancing and Locating Local Features of Faults. Meas. Sci. Technol. 2024, 35, 036107. [Google Scholar] [CrossRef]
- Han, C.; Park, S.; Lee, H. Intermittent Failure in Electrical Interconnection of Avionics System. Reliab. Eng. Syst. Saf. 2019, 185, 61–71. [Google Scholar] [CrossRef]
- Shen, Q.; Lv, K.; Liu, G.; Qiu, J. Impact of Electrical Contact Resistance on the High-Speed Transmission and On-Line Diagnosis of Electrical Connector Intermittent Faults. IEEE Access 2017, 5, 4221–4232. [Google Scholar] [CrossRef]
- Gil-Tomás, D.; Gracia-Morán, J.; Baraza-Calvo, J.C.; Saiz-Adalid, L.J.; Gil-Vicente, P.J. Injecting Intermittent Faults for the Dependability Assessment of a Fault-Tolerant Microcomputer System. IEEE Trans. Reliab. 2015, 65, 648–661. [Google Scholar] [CrossRef]
- Manohar, M.; Koley, E.; Ghosh, S. Microgrid Protection under Wind Speed Intermittency Using Extreme Learning Machine. Comput. Electr. Eng. 2018, 72, 369–382. [Google Scholar] [CrossRef]
- Liu, X.F.; Bo, L.; Luo, H.L. Bearing Faults Diagnostics Based on Hybrid LS-SVM and EMD Method. Measurement 2015, 59, 145–166. [Google Scholar] [CrossRef]
- Wang, Z.; Li, G.; Yao, L.; Qi, X.; Zhang, J. Data-Driven Fault Diagnosis for Wind Turbines Using Modified Multiscale Fluctuation Dispersion Entropy and Cosine Pairwise-Constrained Supervised Manifold Mapping. Knowl.-Based Syst. 2021, 228, 107276. [Google Scholar] [CrossRef]
- Li, Y.; Wang, S.; Li, N.; Deng, Z. Multiscale Symbolic Diversity Entropy: A Novel Measurement Approach for Time-Series Analysis and Its Application in Fault Diagnosis of Planetary Gearboxes. IEEE Trans. Ind. Inf. 2022, 18, 1121–1131. [Google Scholar] [CrossRef]
- Wang, Z.; Yao, L.; Cai, Y. Rolling Bearing Fault Diagnosis Using Generalized Refined Composite Multiscale Sample Entropy and Optimized Support Vector Machine. Measurement 2020, 156, 107574. [Google Scholar] [CrossRef]
- Wang, Z.; Yao, L.; Cai, Y.; Zhang, J. Mahalanobis Semi-Supervised Mapping and Beetle Antennae Search Based Support Vector Machine for Wind Turbine Rolling Bearings Fault Diagnosis. Renew. Energy 2020, 155, 1312–1327. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y.; Luo, S. A Rolling Bearing Fault Diagnosis Method Based on Multi-Scale Fuzzy Entropy and Variable Predictive Model-Based Class Discrimination. Mech. Mach. Theory 2014, 78, 187–200. [Google Scholar] [CrossRef]
- Zheng, J.D.; Pan, H.Y.; Cheng, J.S. Rolling Bearing Fault Detection and Diagnosis Based on Composite Multiscale Fuzzy Entropy and Ensemble Support Vector Machines. Mech. Syst. Signal Process. 2017, 85, 746–759. [Google Scholar] [CrossRef]
- Li, Y.; Miao, B.; Zhang, W.; Chen, P.; Liu, J.; Jiang, X. Refined Composite Multiscale Fuzzy Entropy: Localized Defect Detection of Rolling Element Bearing. J. Mech. Sci. Technol. 2019, 33, 1. [Google Scholar] [CrossRef]
- Li, Y.; Xu, M.; Wang, R.; Huang, W. A Fault Diagnosis Scheme for Rolling Bearing Based on Local Mean Decomposition and Improved Multiscale Fuzzy Entropy. J. Sound Vib. 2016, 360, 277–299. [Google Scholar] [CrossRef]
- Huang, C.Z.; Shen, Z.D.; Zhang, J.H.; Hou, G.L. BIT-Based Intermittent Fault Diagnosis of Analog Circuits by Improved Deep Forest Classifier. IEEE Trans. Instrum. Meas. 2022, 71, 3519213. [Google Scholar] [CrossRef]
- Gao, T.; Yang, J.; Jiang, S. A Novel Incipient Fault Diagnosis Method for Analog Circuits Based on GMKL-SVM and Wavelet Fusion Features. IEEE Trans. Instrum. Meas. 2021, 70, 3502315. [Google Scholar] [CrossRef]
- Gan, X.; Gao, W.; Dai, Z.; Liu, W. Research on WNN Soft Fault Diagnosis for Analog Circuit Based on Adaptive UKF Algorithm. Appl. Soft Comput. 2017, 50, 252–259. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G.E. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Fang, X.; Qu, J.; Chai, Y.; Liu, B. Adaptive Multiscale and Dual Subnet Convolutional Auto-Encoder for Intermittent Fault Detection of Analog Circuits in Noise Environment. ISA Trans. 2023, 136, 428–441. [Google Scholar] [CrossRef]
- Liu, C.; Cheng, G.; Chen, X.; Pang, Y. Planetary Gears Feature Extraction and Fault Diagnosis Method Based on VMD and CNN. Sensors 2018, 18, 1523. [Google Scholar] [CrossRef]
- Shi, J.Y.; He, Q.J.; Wang, Z.L. An LSTM-Based Severity Evaluation Method for Intermittent Open Faults of an Electrical Connector under a Shock Test. Measurement 2021, 173, 108653. [Google Scholar] [CrossRef]
- Wu, P.; Tian, E.; Tao, H.; Chen, Y. Data-Driven Spiking Neural Networks for Intelligent Fault Detection in Vehicle Lithium-Ion Battery Systems. Eng. Appl. Artif. Intell. 2025, 141, 109756. [Google Scholar] [CrossRef]
- Wang, S.D.; Liu, Z.B.; Jia, Z.; Zhao, W.; Li, Z. Intermittent Fault Diagnosis for Electronics-Rich Analog Circuit Systems Based on Multi-Scale Enhanced Convolution Transformer Network with Novel Token Fusion Strategy. Expert Syst. Appl. 2024, 238, 121964. [Google Scholar] [CrossRef]
- Yang, H.; Meng, C.; Wang, C. Data-Driven Feature Extraction for Analog Circuit Fault Diagnosis Using 1-D Convolutional Neural Network. IEEE Access 2020, 8, 18305–18315. [Google Scholar] [CrossRef]
- Zhi, Z.; Liu, L.; Liu, D.; Hu, C. Fault Detection of the Harmonic Reducer Based on CNN-LSTM with a Novel Denoising Algorithm. IEEE Sens. J. 2022, 22, 2572–2581. [Google Scholar] [CrossRef]
- An, Y.Y.; Zhang, K.; Liu, Q.; Chai, Y.; Huang, X. Rolling Bearing Fault Diagnosis Method Based on Periodic Sparse Attention and LSTM. IEEE Sens. J. 2022, 22, 12044–12053. [Google Scholar] [CrossRef]
- Cheng, X.Z.; Lv, K.H.; Zhang, Y.; Wang, L.; Zhao, W.; Liu, G.; Qiu, J. RUL Prediction Method for Electrical Connectors with Intermittent Faults Based on an Attention-LSTM Model. IEEE Trans. Compon. Packag. Manuf. Technol. 2023, 13, 628–637. [Google Scholar] [CrossRef]
- Syed, W.A.; Perinpanayagam, S.; Samie, M.; Jennions, I. A Novel Intermittent Fault Detection Algorithm and Health Monitoring for Electronic Interconnections. IEEE Trans. Compon. Packag. Manuf. Technol. 2016, 6, 400–406. [Google Scholar] [CrossRef]
- Fang, X.; Qu, J.; Tang, Q.; Chai, Y. Intermittent Fault Recognition of Analog Circuits in the Presence of Outliers via Density Peak Clustering with Adaptive Weighted Distance. IEEE Sens. J. 2023, 23, 13351–13359. [Google Scholar] [CrossRef]
- Huang, D.J.; Zhang, W.A.; Guo, F.H.; Liu, W.; Shi, X. Wavelet Packet Decomposition-Based Multiscale CNN for Fault Diagnosis of Wind Turbine Gearbox. IEEE Trans. Cybern. 2023, 53, 443–453. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
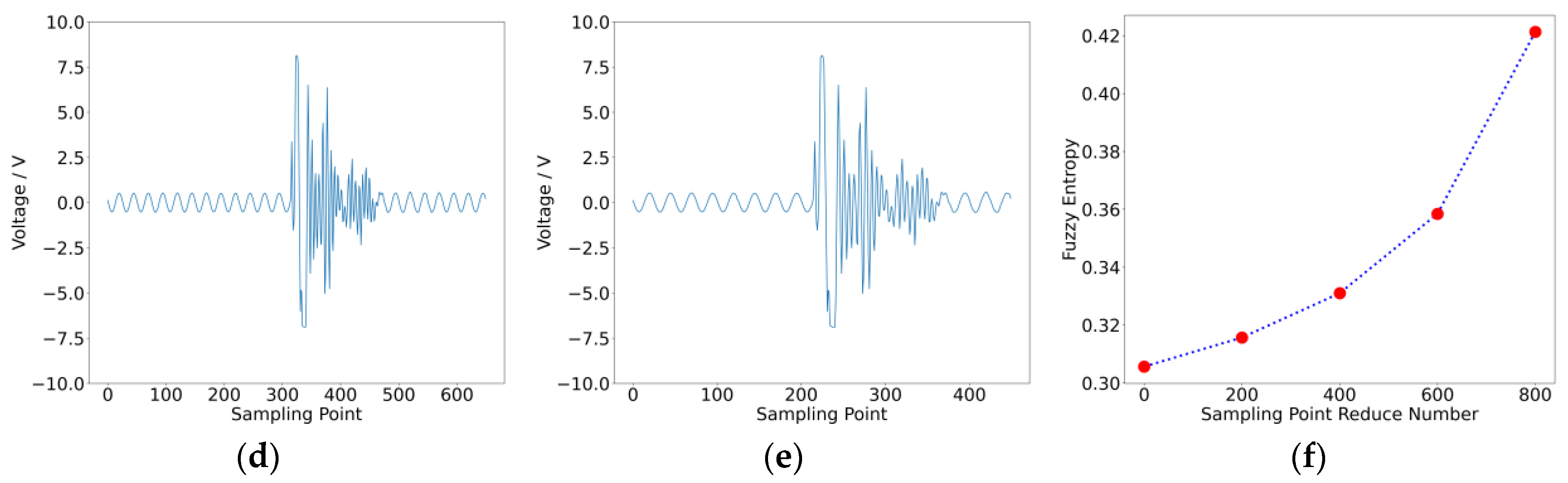
| No. | Points Lost | Fuzzy Entropy |
|---|---|---|
| 1 | 0 | 0.3056 |
| 2 | 200 | 0.3157 |
| 3 | 400 | 0.3310 |
| 4 | 600 | 0.3584 |
| 5 | 800 | 0.4213 |
| No. | Class | Formula |
|---|---|---|
| 1 | Mean | |
| 2 | IQR | |
| 3 | Variance | |
| 4 | RMS |
| Network Layer | Convolution Kernel/Step Size (Or Other Parameters) | Number of Convolution Kernels | Output Size |
|---|---|---|---|
| Convolutional layer1 | 3 × 1/1 × 1 | 16 | 16 × 20 |
| BatchNorm | - | 16 | 16 × 20 |
| Convolutional layer2 | 3 × 1/1 × 1 | 32 | 32 × 20 |
| BatchNorm | - | 32 | 32 × 20 |
| Convolutional layer3 | 3 × 1/1 × 1 | 64 | 64 × 20 |
| BatchNorm | - | 64 | 64 × 20 |
| Fully connected layer1 | Number: 2560 | - | 2560 × 1 |
| Dropout layer | Forgetting rate: 0.5 | - | |
| Fully connected layer2 | Number: 256 | - | 256 × 1 |
| SoftMax layer | Number: 10/4 | - | 10/4 |
| Case Number | States | Labels | Case Number | States | Labels |
|---|---|---|---|---|---|
| Case 1 | IF R1 | 0 | Case 2 | IF C2 | 0 |
| IF C2 | 1 | IF R3 | 1 | ||
| IF C1 | 2 | IF R4 | 2 | ||
| IF R2 | 3 | Noise | 3 | ||
| IF R3 | 4 | / | / | ||
| IF R4 | 5 | / | / | ||
| IF R5 | 6 | / | / | ||
| IF Positive | 7 | / | / | ||
| IF Negative | 8 | / | / | ||
| Noise | 9 | / | / |
| Case | Case 1 | Case 2 | |
|---|---|---|---|
| Classifier | CNN | CNN | |
| Average classification accuracy | MFE [14] | 88.89% | 96.67% |
| RCMFE [15] | 88.30% | 99.17% | |
| CMFE [16] | 91.81% | 99.17% | |
| IMFE [17] | 94.15% | 97.50% | |
| Ours | 94.15% | 99.17% |
| Case | Case 1 | Case 2 | |
|---|---|---|---|
| Classifier | CNN | CNN | |
| Average classification accuracy | Only Mean | 84.80% | 98.33% |
| Only IQR | 71.93% | 99.17% | |
| Only Variance | 80.70% | 98.33% | |
| Only RMS | 82.46% | 99.17% | |
| Comprehensive amplitude features | 87.72% | 100.00% |
| Case | Case 1 | Case 2 | |
|---|---|---|---|
| Classifier | CNN | CNN | |
| Average classification accuracy | IQR-based features | 80.70% | 99.17% |
| Variance-based features | 83.04% | 98.33% | |
| RMS-based features | 85.96% | 100.00% | |
| Mean-pooling features | 84.80% | 99.17% | |
| Comprehensive amplitude features | 87.72% | 100.00% |
| Case | Case 1 | Case 2 | |
|---|---|---|---|
| Classifier | CNN | CNN | |
| Average classification accuracy | Fuzzy entropy features | 94.15% | 99.17% |
| Comprehensive amplitude features | 87.72% | 100.00% | |
| Fuzzy entropy + IQR-based | 95.91% | 99.17% | |
| Fuzzy entropy + Variance-based | 96.49% | 99.17% | |
| Fuzzy entropy + RMS-based | 97.08% | 100.00% | |
| Fuzzy entropy + mean-pooling | 97.08% | 100.00% | |
| Ours | 98.83% | 100.00% |
| Classifier | CNN | CNN with Pooling Layers | |
|---|---|---|---|
| Average classification accuracy | Case 1 | 98.83% | 95.18% |
| Case 2 | 100.00% | 99.17% |
| No. | Methods | Average Classification Accuracy for Case 1 | Average Classification Accuracy for Case 2 |
|---|---|---|---|
| 1 | MSECTN [26] | 90.64% | 99.17% |
| 2 | WPD + CNN [33] | 94.15% | 99.17% |
| 3 | PSAL [29] | 95.91% | 98.33% |
| 4 | 1D-CNN (Yang) [27] | 97.08% | 99.17% |
| 5 | CNN + LSTM [28] | 97.66% | 99.17% |
| 6 | Our Method | 98.83% | 100.00% |
| No. | Methods | Training Time for Case 1 (Diagnostic Cost) | Testing Time for Case 1 (Time to Detection) |
|---|---|---|---|
| 1 | MSECTN [26] | 41 min | 937 ms |
| 2 | WPD + CNN [33] | 2 min 33 s | 104 ms |
| 3 | PSAL [29] | 47 min | 824 ms |
| 4 | 1D-CNN (Yang) [27] | 1 min 31 s | 75 ms |
| 5 | CNN + LSTM [28] | 1 min 56 s | 80 ms |
| 6 | Our Method | 1 min 58 s | 81 ms |
| No. | Methods | Training Time for Case 2 (Diagnostic Cost) | Testing Time for Case 2 (Time to Detection) |
|---|---|---|---|
| 1 | MSECTN [26] | 28 min 59 s | 534 ms |
| 2 | WPD + CNN [33] | 1 min 56 s | 72 ms |
| 3 | PSAL [29] | 32 min 20 s | 433 ms |
| 4 | 1D-CNN (Yang) [27] | 1 min 11 s | 65 ms |
| 5 | CNN + LSTM [28] | 1 min 19 s | 48 ms |
| 6 | Our Method | 1 min 40 s | 55 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Hou, Y.; Wang, Z.; Yang, Z.; Lv, Z. A Diagnosis Method for Noise and Intermittent Faults in Analog Circuits Based on the Fusion of Multiscale Fuzzy Entropy Features and Amplitude Features. Sensors 2025, 25, 1090. https://doi.org/10.3390/s25041090
Shi J, Hou Y, Wang Z, Yang Z, Lv Z. A Diagnosis Method for Noise and Intermittent Faults in Analog Circuits Based on the Fusion of Multiscale Fuzzy Entropy Features and Amplitude Features. Sensors. 2025; 25(4):1090. https://doi.org/10.3390/s25041090
Chicago/Turabian StyleShi, Junyou, Yilei Hou, Zili Wang, Zhilin Yang, and Zhenyang Lv. 2025. "A Diagnosis Method for Noise and Intermittent Faults in Analog Circuits Based on the Fusion of Multiscale Fuzzy Entropy Features and Amplitude Features" Sensors 25, no. 4: 1090. https://doi.org/10.3390/s25041090
APA StyleShi, J., Hou, Y., Wang, Z., Yang, Z., & Lv, Z. (2025). A Diagnosis Method for Noise and Intermittent Faults in Analog Circuits Based on the Fusion of Multiscale Fuzzy Entropy Features and Amplitude Features. Sensors, 25(4), 1090. https://doi.org/10.3390/s25041090