
Node Selection and Path Optimization for Passive Target Localization via UAVs
Abstract
1. Introduction
1.1. Overview
1.2. Original Contributions
1.3. Organization
2. Problem Formulation
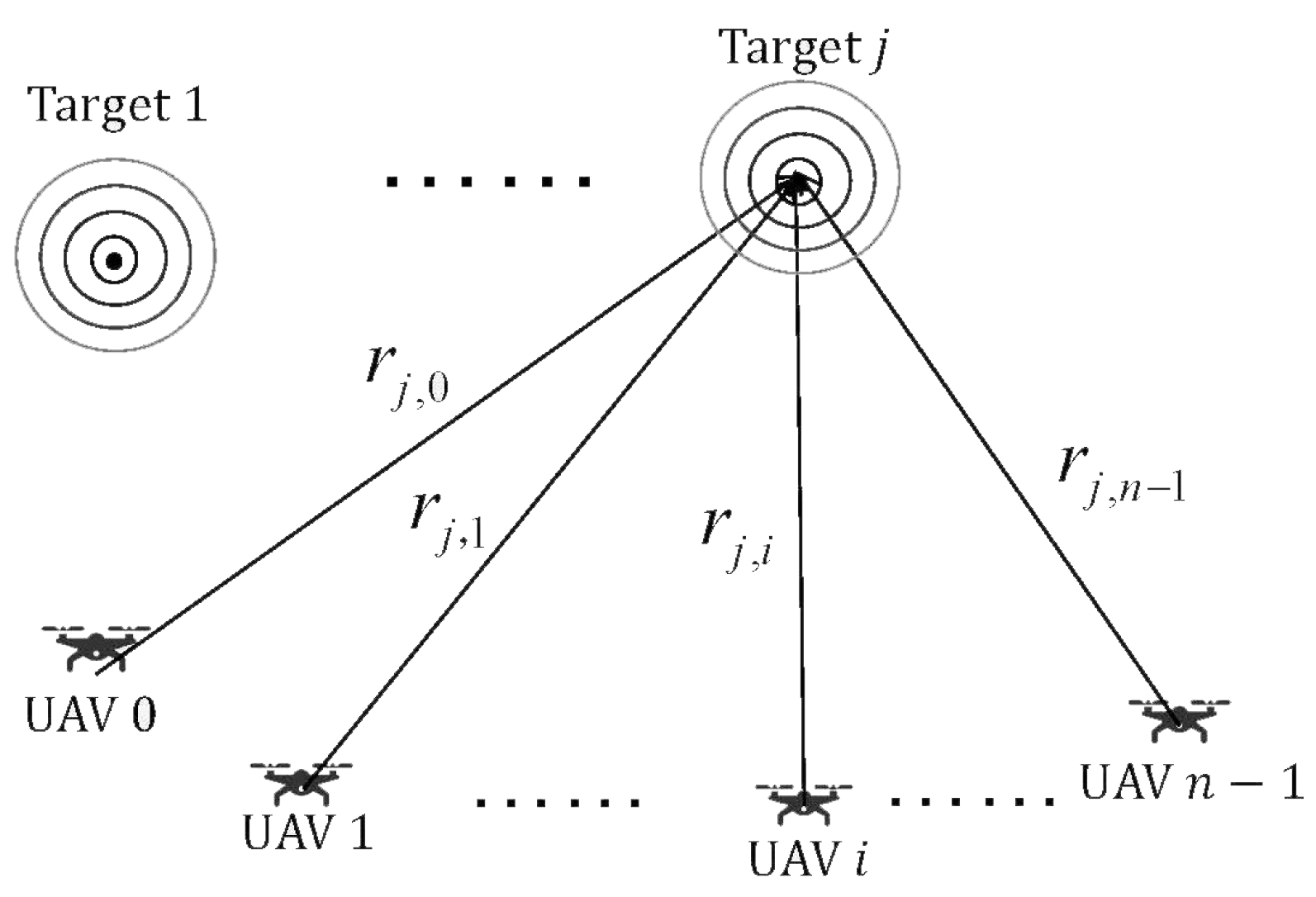
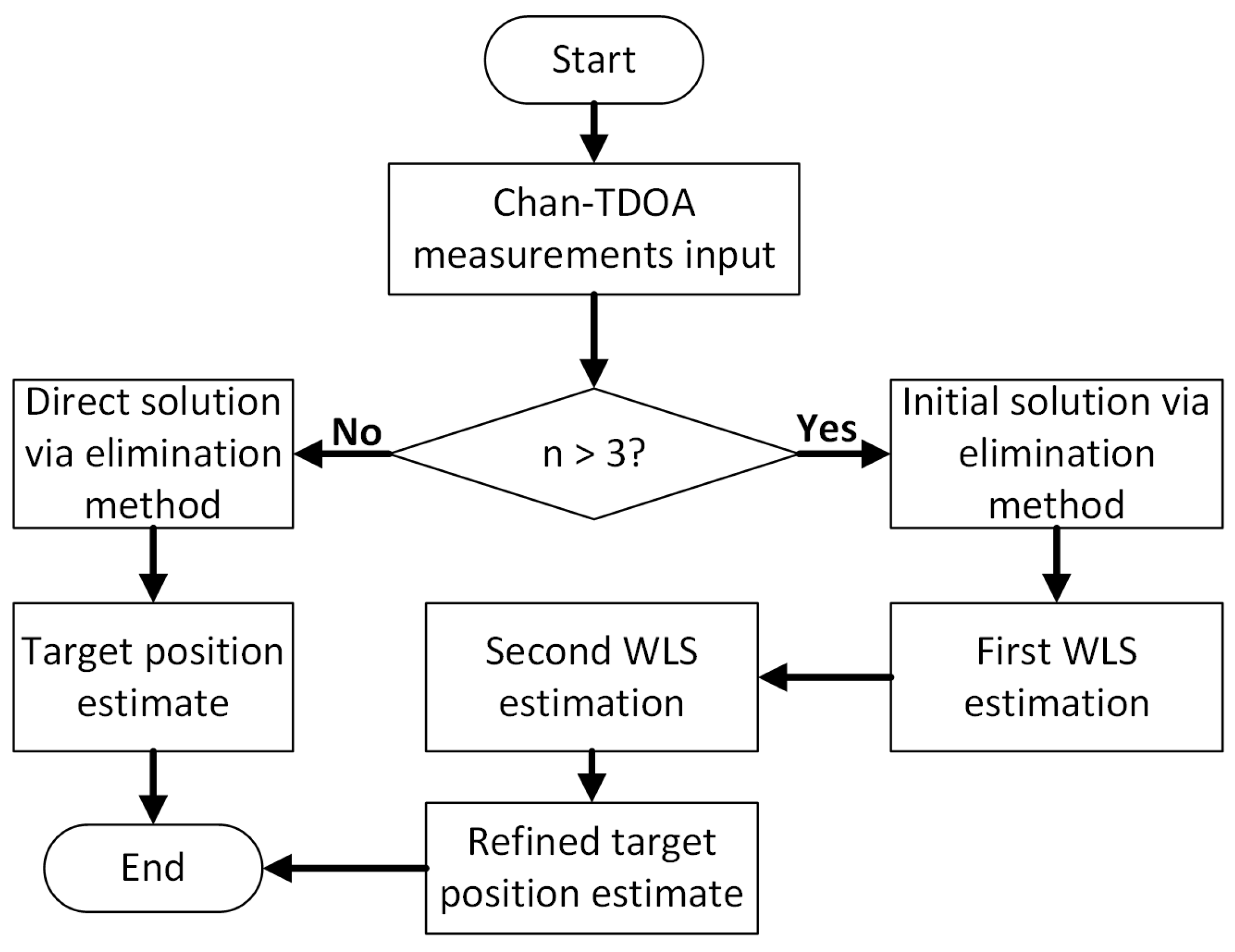
2.1. Target Localization Model Based on the Chan-TDOA Algorithm
2.2. CRLB Derivation for TDOA Measurement Errors in the Chan-TDOA Model
2.3. Optimization Problem Formation
3. CRLB-Based Node Selection Method
3.1. Problem Description
3.2. Constraint Analysis
3.3. Node Selection Optimization Model
3.4. Node Selection Algorithm Design
| Algorithm 1: CRLB-based node selection algorithm |
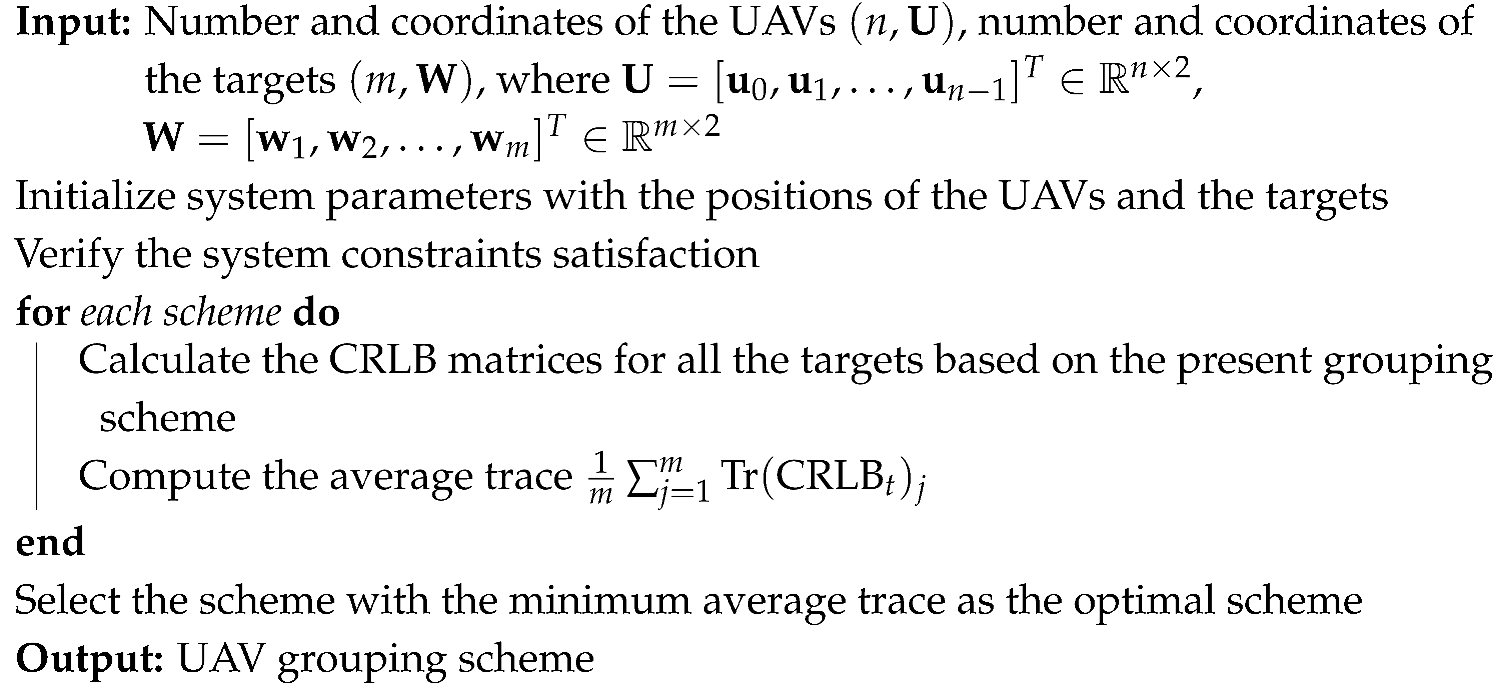 |
4. CRLB-Based Path Optimization Method
4.1. Problem Description
4.2. Constraint Analysis
4.3. Path Optimization Model
4.4. Path Optimization Algorithm Design
| Algorithm 2: CRLB-based path optimization via PSO |
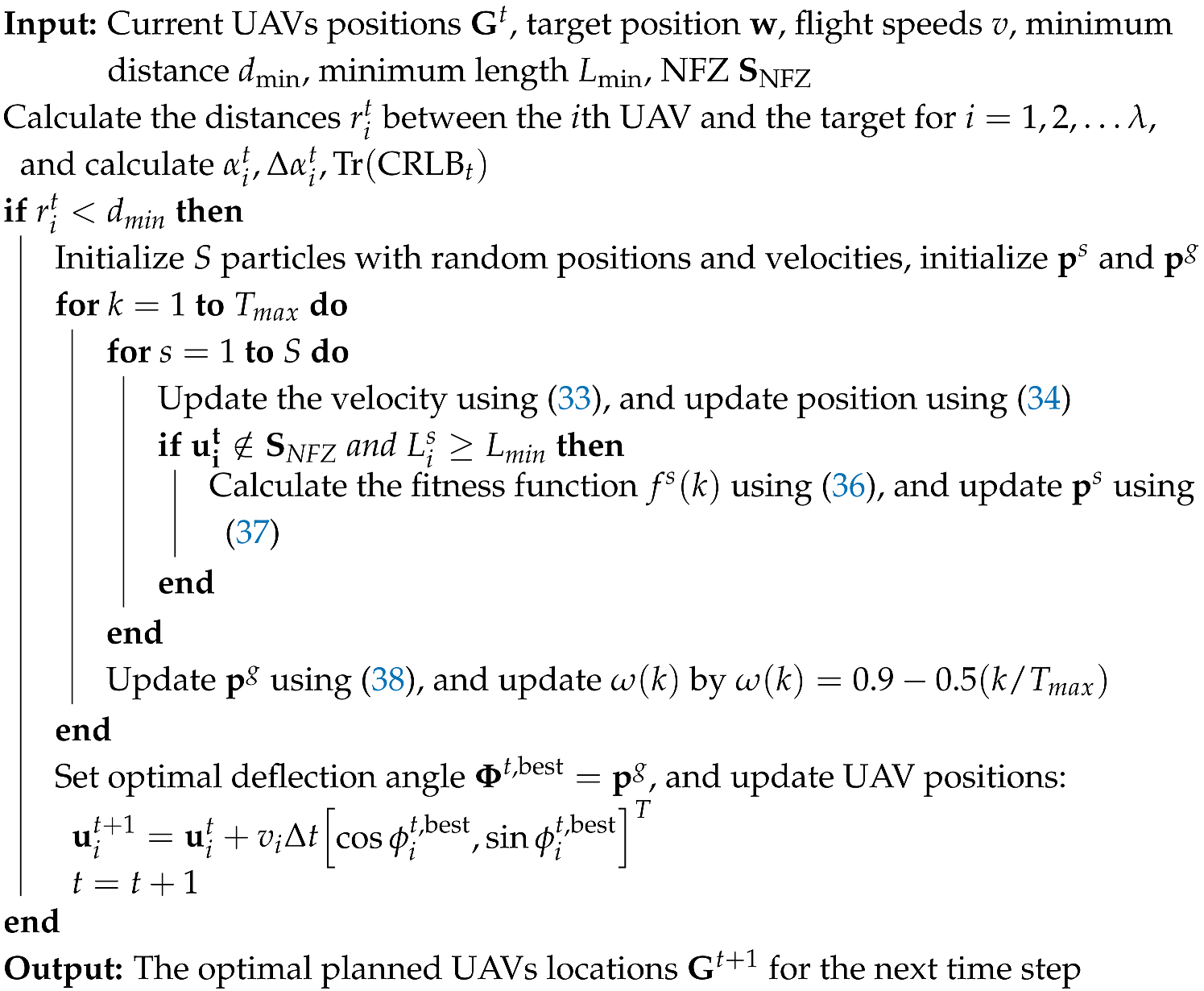 |
5. Numerical Results
5.1. Simulation Parameters and the Topology Structure Set
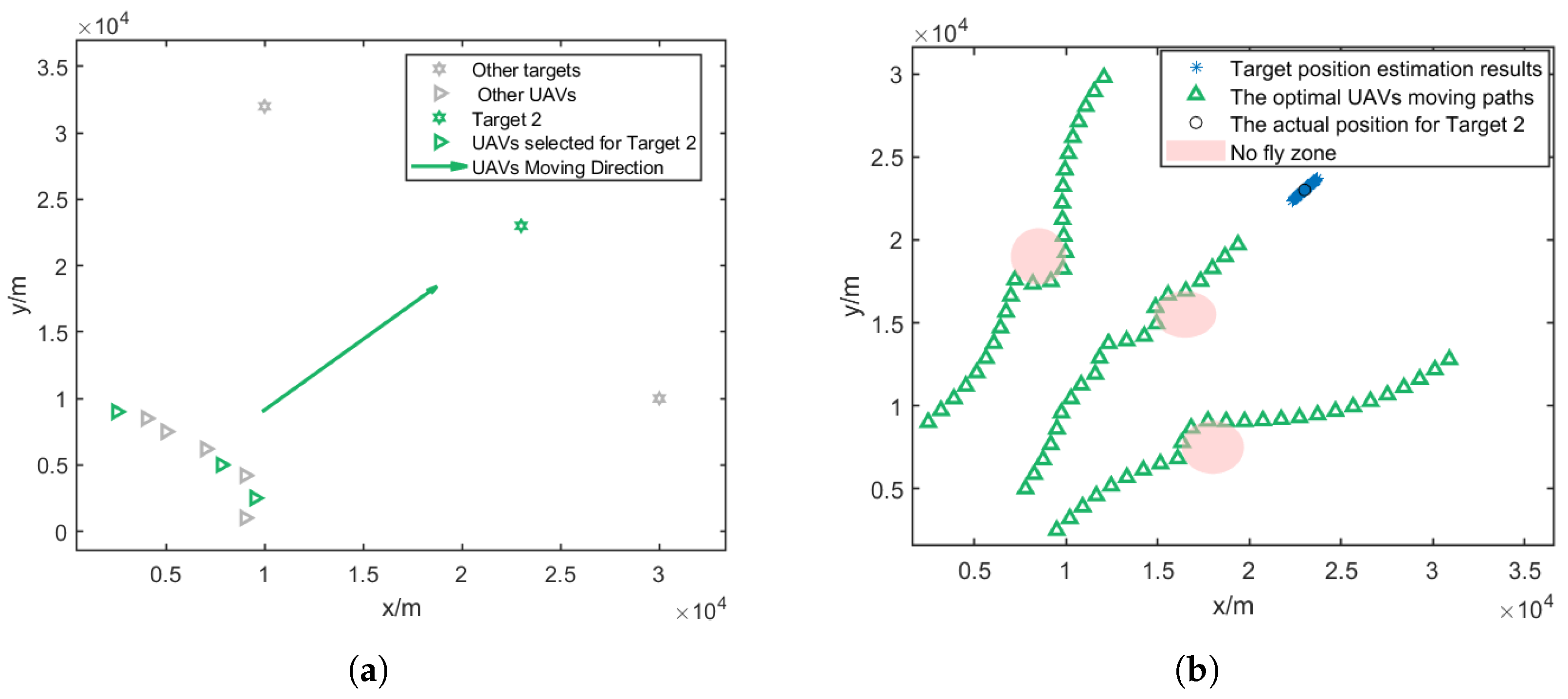
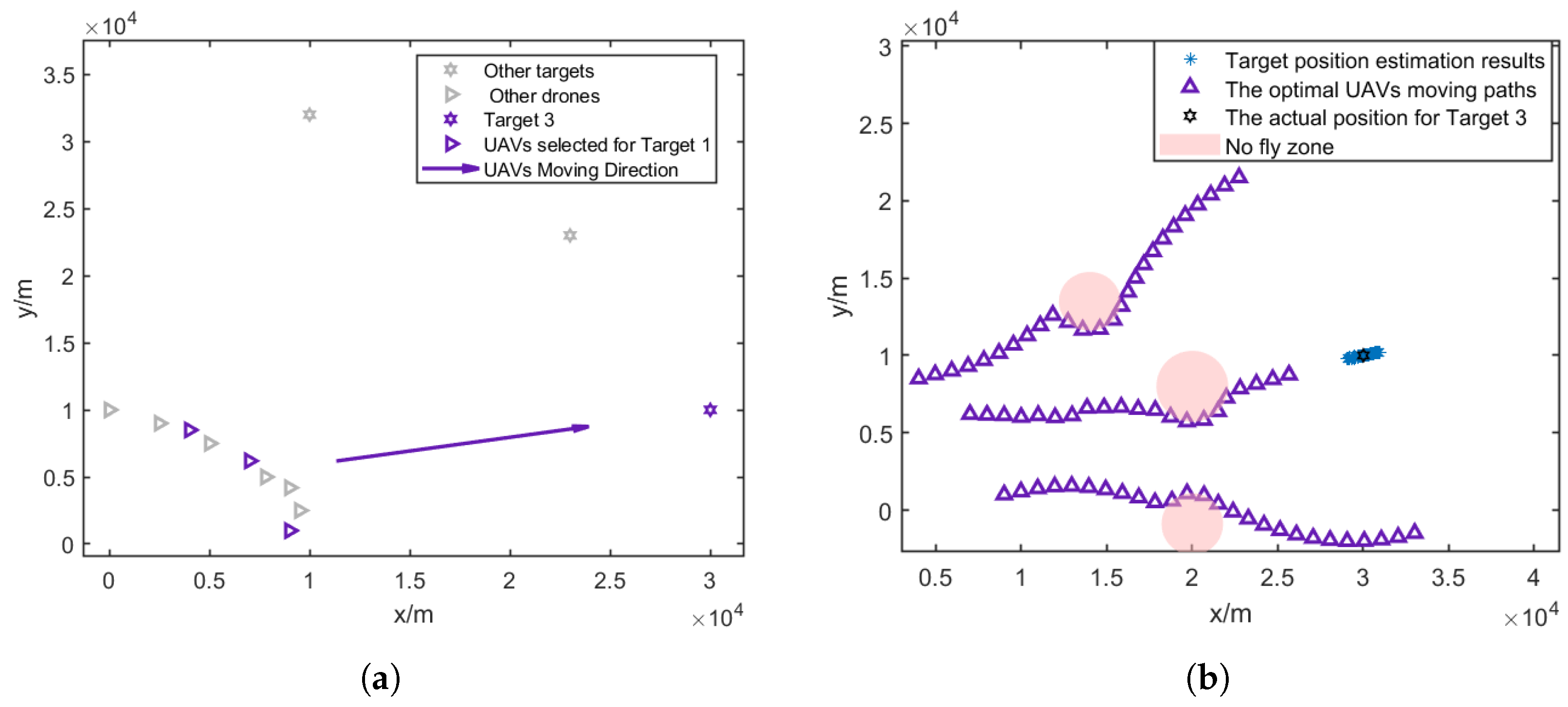
5.2. Simulation Results of the Node Selection Algorithm
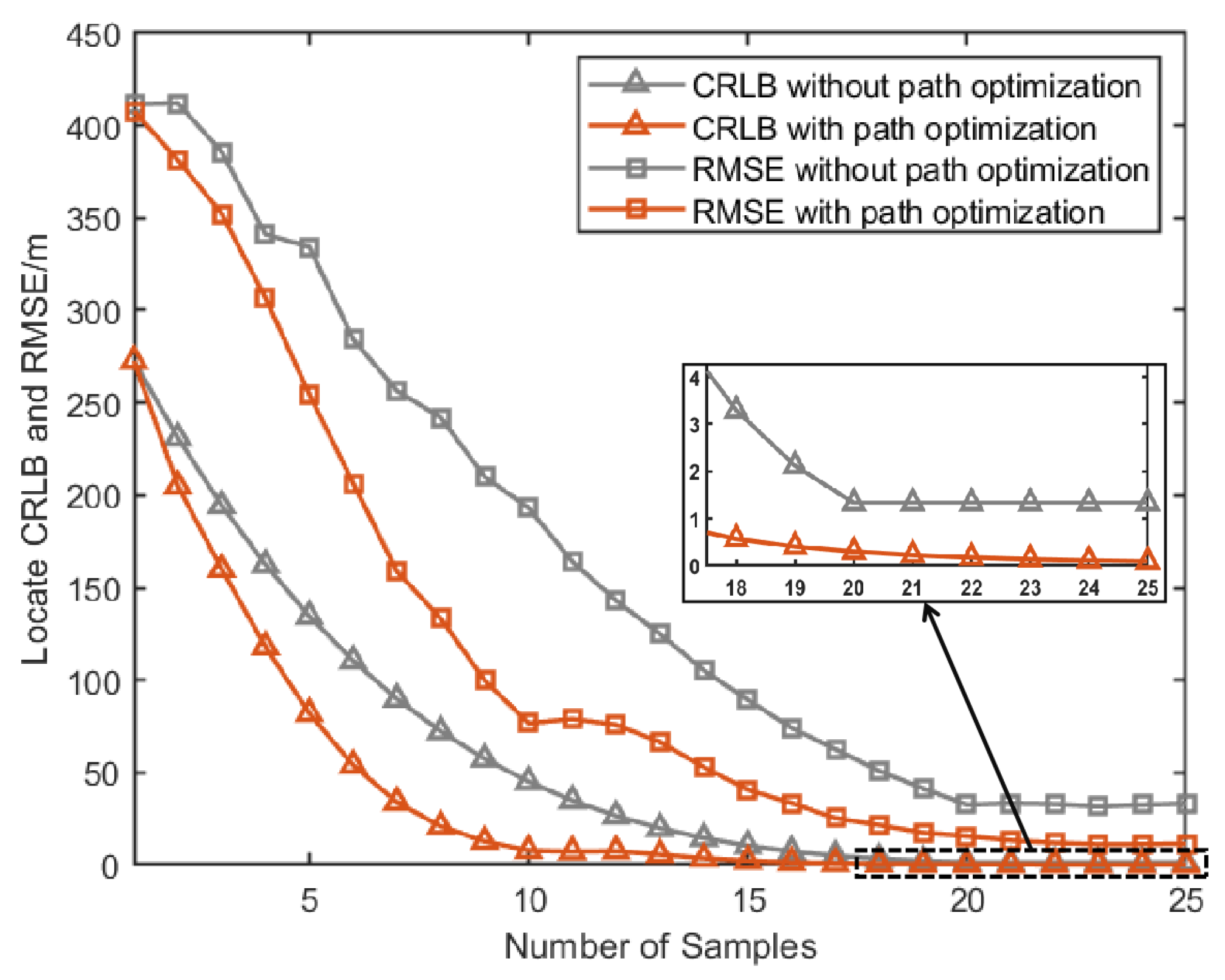
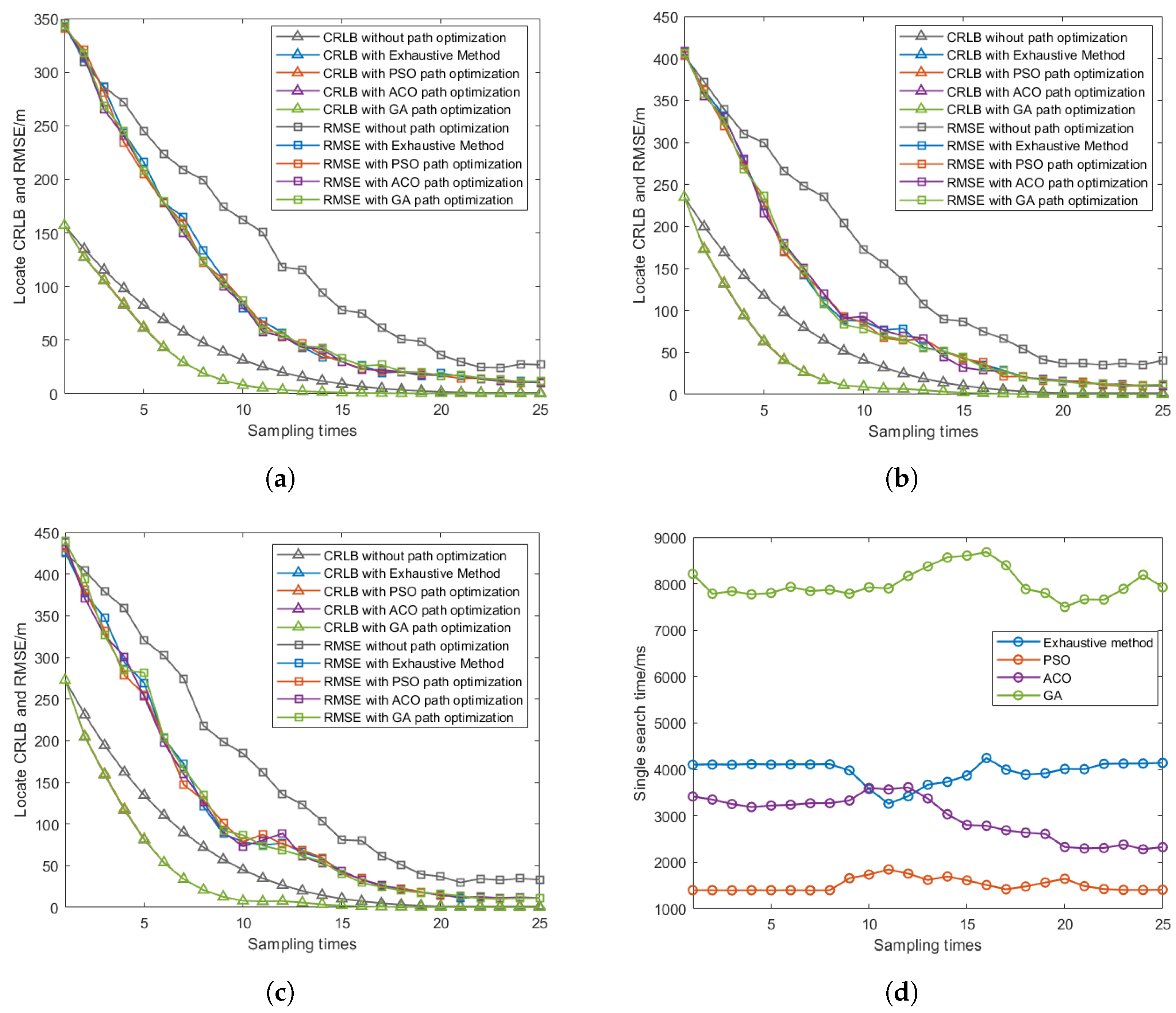
5.3. Simulation Results of the CRLB-Based Path Optimization Method
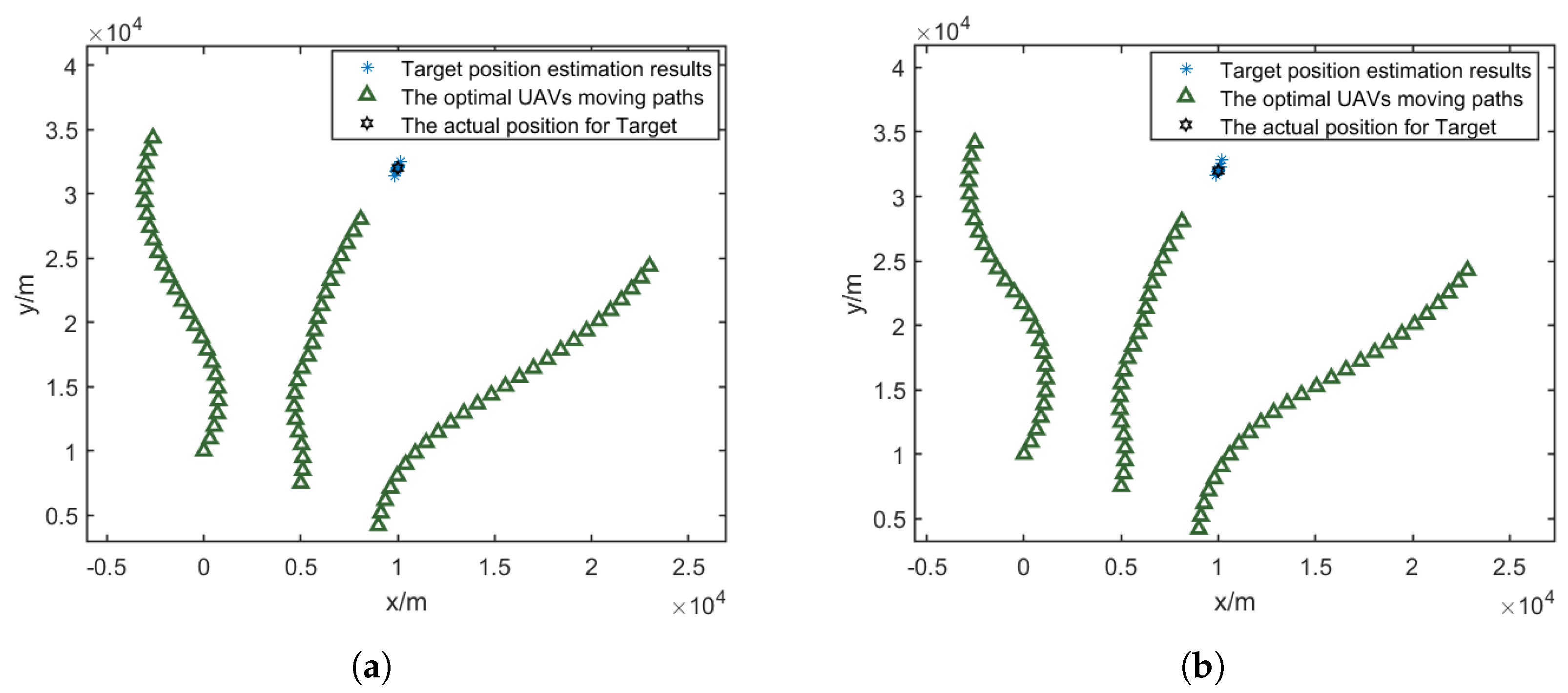
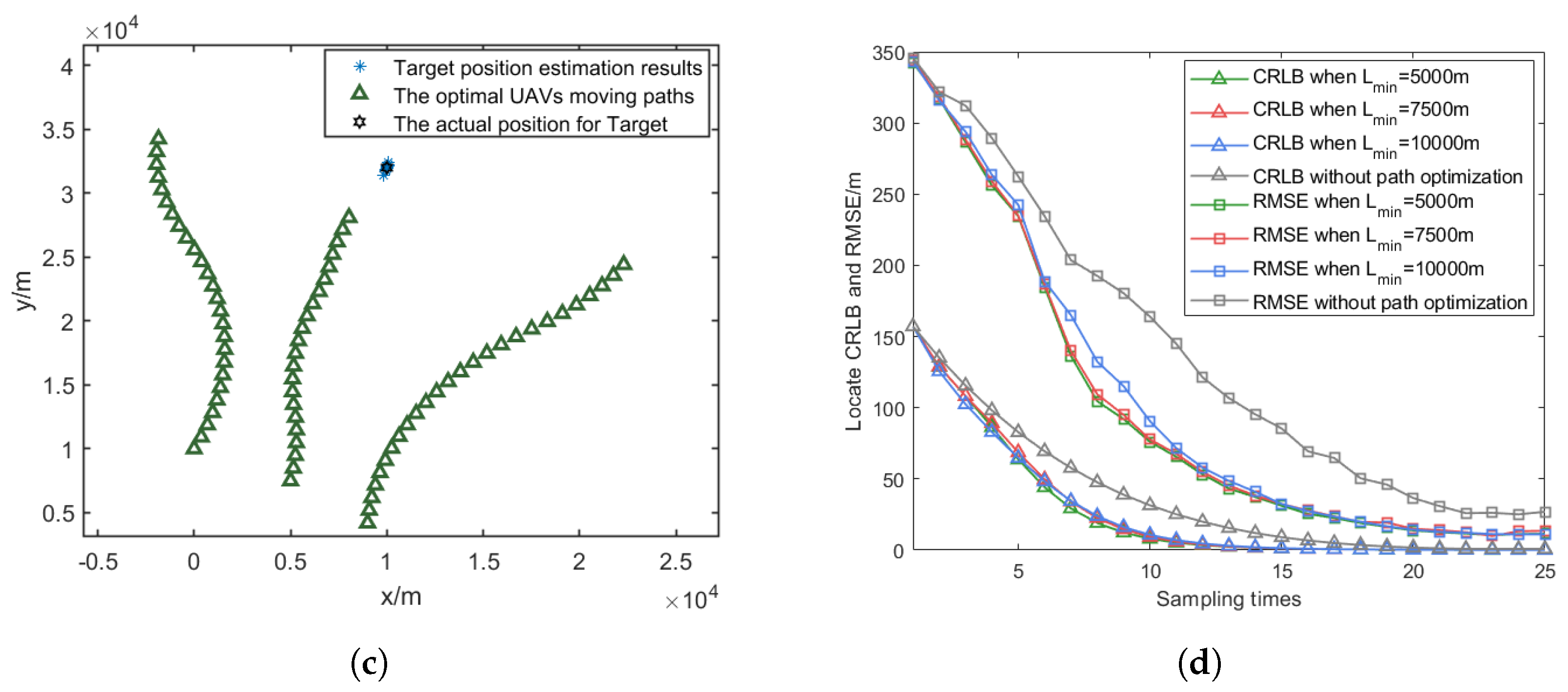
5.4. Impact Analysis of Minimum Turning Radius
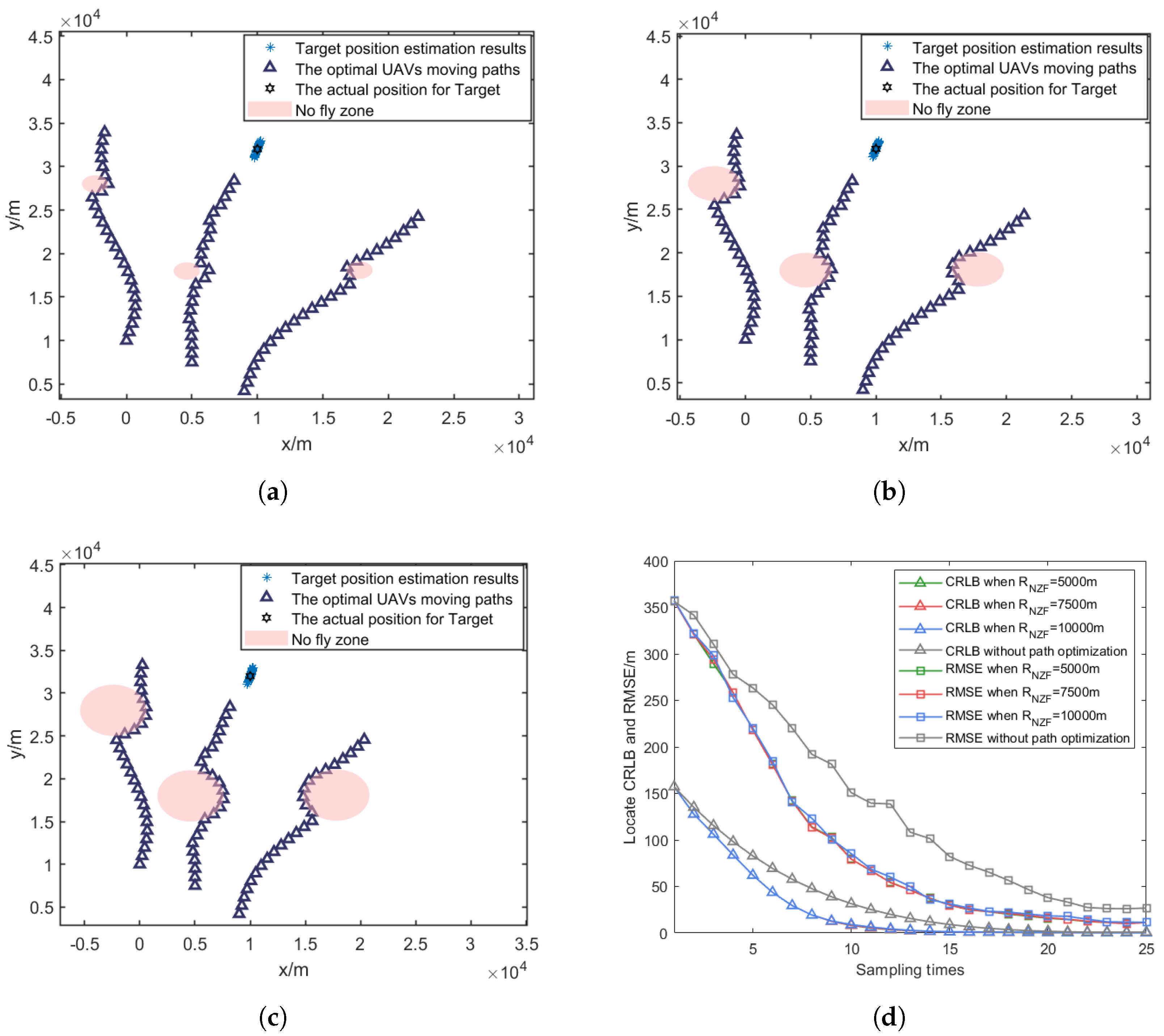
5.5. Impact Analysis of No-Fly-Zone Size
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Mathematical Derivations of Chan-TDOA Algorithm
References
- Feldstein, S. How global demand for military drones is transforming international security and geopolitics. Georget. J. Int. Aff. 2023, 24, 146–155. [Google Scholar] [CrossRef]
- Gargalakos, M. The role of unmanned aerial vehicles in military communications: Application scenarios, current trends, and beyond. J. Def. Model. Simul. 2024, 21, 313–321. [Google Scholar] [CrossRef]
- Cao, X.; Wang, Z.; Zheng, B.; Tan, Y. Improved UAV-to-Ground Multi-Target Tracking Algorithm Based on StrongSORT. Sensors 2023, 23, 9239. [Google Scholar] [CrossRef] [PubMed]
- Zhou, R.; Almustafa, M.K.; Nehdi, M.L.; Su, H. Automated localization of dike leakage outlets using UAV-borne thermography and YOLO-based object detectors. ISPRS J. Photogramm. Remote Sens. 2024, 218, 551–573. [Google Scholar] [CrossRef]
- Mahmood, S.A.; Abdulmunem, F.A.; Lafta, S.H. Lightweight deep learning model-based UAVs visual detection. Multimed. Tools Appl. 2024. [Google Scholar] [CrossRef]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Rosić, M.; Sedak, M.; Simić, M.; Pejović, P. Chaos-Enhanced Adaptive Hybrid Butterfly Particle Swarm Optimization Algorithm for Passive Target Localization. Sensors 2022, 22, 5739. [Google Scholar] [CrossRef] [PubMed]
- Justin, K.; Simone, D. Autonomous angles-only multitarget tracking for spacecraft swarms. Acta Astronaut. 2021, 189, 514–529. [Google Scholar]
- Fokin, G. Passive Geolocation with Unmanned Aerial Vehicles using TDOA-AOA Measurement Processing. In Proceedings of the 2019 21st International Conference on Advanced Communication Technology (ICACT), PyeongChang, Republic of Korea, 17–20 February 2019; pp. 360–365. [Google Scholar] [CrossRef]
- Agrawal, S.; Kumar, P.; Sharma, A. Passive Emitter Localisation Using TDOA and FDOA Measurements from UAV. In Proceedings of the 2020 IEEE International Conference for Innovation in Technology (INOCON), Bangluru, India, 6–8 November 2020; pp. 1–5. [Google Scholar]
- Zhang, X.; Duan, L. Fast Deployment of UAV Networks for Optimal Wireless Coverage. IEEE Trans. Mob. Comput. 2019, 18, 588–601. [Google Scholar] [CrossRef]
- Suh, T.; Kim, W. Observability Study on Passive Target Localization by Conic–Angle Measurements. Sensors 2021, 21, 6439. [Google Scholar] [CrossRef]
- Jeon, M.H.; Lim, W.J.; Ryoo, C. Task Assignment for Multiple Multi-purpose Unmanned Aerial Vehicles Using Greedy Algorithm. Int. J. Aeronaut. Space Sci. 2024, 25, 1380–1394. [Google Scholar] [CrossRef]
- Xin, J.; Zhong, J.; Li, S. Greedy mechanism based particle swarm optimization for path planning problem of an unmanned surface vehicle. Sensors 2019, 19, 4620. [Google Scholar] [CrossRef]
- Wang, X.; Huang, C.; Chen, F. An improved particle swarm optimization algorithm for unmanned aerial vehicle route planning. J. Phys. Conf. Ser. 2022, 2245, 012013. [Google Scholar] [CrossRef]
- Meisquita, R.; Gasper, P. A novel path planning optimization algorithm based on particle swarm optimization for UAVs for bird monitoring and repelling. Processes 2021, 10, 62. [Google Scholar] [CrossRef]
- Huang, H.; Yang, Y.; Wang, H.; Ding, Z.; Sari, H.; Adachi, F. Deep Reinforcement Learning for UAV Navigation Through Massive MIMO Technique. IEEE Trans. Veh. Technol. 2020, 69, 1117–1121. [Google Scholar] [CrossRef]
- Cheng, C.; Zhang, H.; Sun, Y.; Tao, H.; Chen, Y. A cross-platform deep reinforcement learning model for autonomous navigation without global information in different scenes. Control Eng. Pract. 2024, 150, 105991. [Google Scholar] [CrossRef]
- Lee, M.-F.R.; Yusuf, S.H. Mobile Robot Navigation Using Deep Reinforcement Learning. Processes 2022, 10, 2748. [Google Scholar] [CrossRef]
- Maier, G.; Pfaff, F.; Wagner, M.; Pieper, C.; Gruna, R.; Noack, B.; Kruggel-Emden, H.; Längle, T.; Hanebeck, U.D.; Wirtz, S.; et al. Real-time multitarget tracking for sensor-based sorting—A new implementation of the auction algorithm for graphics processing units. J. Real-Time Image Process. 2019, 16, 2261–2272. [Google Scholar] [CrossRef]
- Rokbani, N.; Kromer, P.; Twir, I.; Alimi, A.M. A hybrid hierarchical heuristic-ACO with local search applied to travelling salesman problem, AS-FA-Ls. Int. J. Syst. Dyn. Appl. 2020, 9, 58–73. [Google Scholar] [CrossRef]
- Siemiatkowska, B.; Stecz, W. A Framework for Planning and Execution of Drone Swarm Missions in a Hostile Environment. Sensors 2021, 21, 4150. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.H.; Zhang, K.Y.; Yang, L.; Wang, G.Y.; Hu, G. Improving heuristic functions in A* algorithm path planning. J. Res. Sci. Eng. 2022, 4, 10–20. [Google Scholar]
- Darrah, M.; Wilhelm, J.; Munasinghe, T.; Duling, K.; Yokum, S.; Sorton, E.; Rojas, J.; Wathen, M. A flexible genetic algorithm system for multi-UAV surveillance: Algorithm and flight testing. Unmanned Syst. 2015, 3, 49–62. [Google Scholar] [CrossRef]
- Huang, C.; Zhou, X.; Ran, X.; Wang, J.; Chen, H.; Deng, W. Adaptive cylinder vector particle swarm optimization with differential evolution for UAV path planning. Eng. Appl. Artif. Intell. 2023, 121, 105942. [Google Scholar] [CrossRef]
- Yang, X.S. A new metaheuristic bat-inspired algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); Springer: Berlin/Heidelberg, Germany, 2010; p. 65. [Google Scholar]
- Dogancay, K.; Hmam, H. UAV path optimization for angle-only self-localization and target tracking based on the Bayesian Fisher information matrix. Sensors 2024, 24, 3120. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE (Traditional) (m) | RMSE (Proposed) (m) | Percentage Reduction (%) |
|---|---|---|
| 564.7680 | 352.0307 | 37.6681 |
| 532.7729 | 408.3508 | 23.3537 |
| 590.6810 | 427.4778 | 27.6297 |
| Parameter | PSO | GA | ACO |
|---|---|---|---|
| Size | 50 particles | 20 individuals | 50 ants |
| Max iterations | 500 | 500 | 500 |
| Early stopping | Fitness < | No improvement in | fitness < |
| criterion | 20 generations | ||
| Special | : 2.5 → 0.5 | Crossover rate: 0.8 | Evaporation rate: 0.1 |
| parameters | : 0.5 → 2.5 | Mutation rate: 0.1 | Influence factor (): 1 |
| w: 0.9 → 0.4 | Elite count: 2 | Heuristic factor (): 2 | |
| Constriction: 0.729 | Deposit factor (Q): 1 | ||
| Optimization | Local search per | Elite retention | Local search per |
| strategy | 10 iterations; | 10 iterations; | |
| Reinitialize 10% | Space discretization: | ||
| Particles per 20 iter. | 50 points |
| Metric | Exhaustive | PSO | ACO | GA |
|---|---|---|---|---|
| CRLB reduction (%) | 66.70 | 66.66 | 66.77 | 66.57 |
| RMSE reduction (%) | 44.24 | 44.99 | 45.02 | 44.64 |
| Single iteration computation time(s) | 4.28 | 1.34 | 3.05 | 7.76 |
| Minimum Turning Radius | CRLB Reduction | RMSE Reduction |
|---|---|---|
| (%) | (%) | |
| 5000 m | 64.57 | 45.38 |
| 7500 m | 62.15 | 43.14 |
| 10,000 m | 61.71 | 41.79 |
| No-Fly-Zone Radius | CRLB Reduction | RMSE Reduction |
|---|---|---|
| (%) | (%) | |
| 1000 m | 63.88 | 45.02 |
| 2000 m | 62.51 | 44.93 |
| 3000 m | 59.94 | 42.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, X.; Zhong, Z.; Li, X.; Yue, Y. Node Selection and Path Optimization for Passive Target Localization via UAVs. Sensors 2025, 25, 780. https://doi.org/10.3390/s25030780
Xing X, Zhong Z, Li X, Yue Y. Node Selection and Path Optimization for Passive Target Localization via UAVs. Sensors. 2025; 25(3):780. https://doi.org/10.3390/s25030780
Chicago/Turabian StyleXing, Xiaoyou, Zhiwen Zhong, Xueting Li, and Yiyang Yue. 2025. "Node Selection and Path Optimization for Passive Target Localization via UAVs" Sensors 25, no. 3: 780. https://doi.org/10.3390/s25030780
APA StyleXing, X., Zhong, Z., Li, X., & Yue, Y. (2025). Node Selection and Path Optimization for Passive Target Localization via UAVs. Sensors, 25(3), 780. https://doi.org/10.3390/s25030780