
Real-Time Optimization of Discrete Element Models for Studying Asphalt Mixture Compaction Characteristics at the Meso-Scale †


Abstract
1. Introduction
2. Materials and Methods
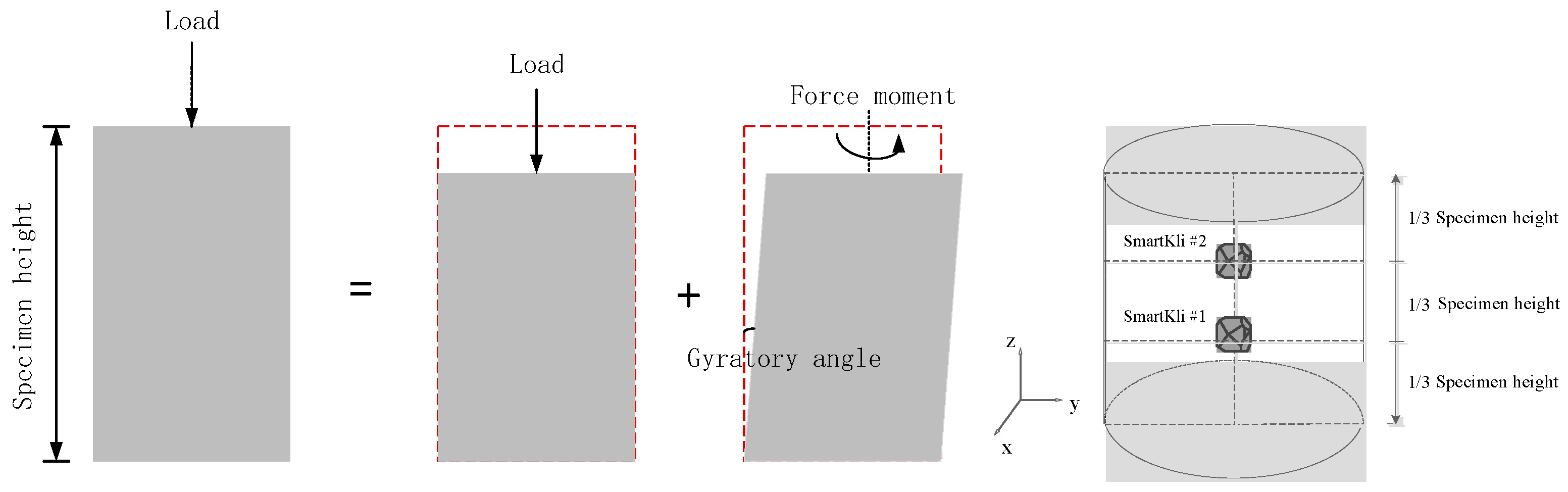
2.1. Laboratory SGC Test
2.2. DEM Simulation of SGC Test
2.3. Real-Time Calibration of Virtual SGC Model Using Laboratory Test Results
2.3.1. Rotation Status
2.3.2. Data Fusion
- (1)
- Acquire the ball’s rotation status at the kth time step in DEM.
- (2)
- Import the measurements of SmartKlis into the virtual model.
- (3)
- Calculate the difference between the SmartKli measured value and the SmartKli simulation ball predicted value:
- (4)
- Update the ball’s rotation status at the k+1th time step using the Kalman filter. The mathematical description of the Kalman filter is shown in Equations (4)–(8) [29]:
2.3.3. Optimization of All Particles During Compaction
3. Results and Discussions
3.1. Characterization of Particle Rotation at Different Locations in SGC
3.1.1. Measurements of Particle Rotation in Laboratory Tests
3.1.2. Prediction of Particle Motion in DEM
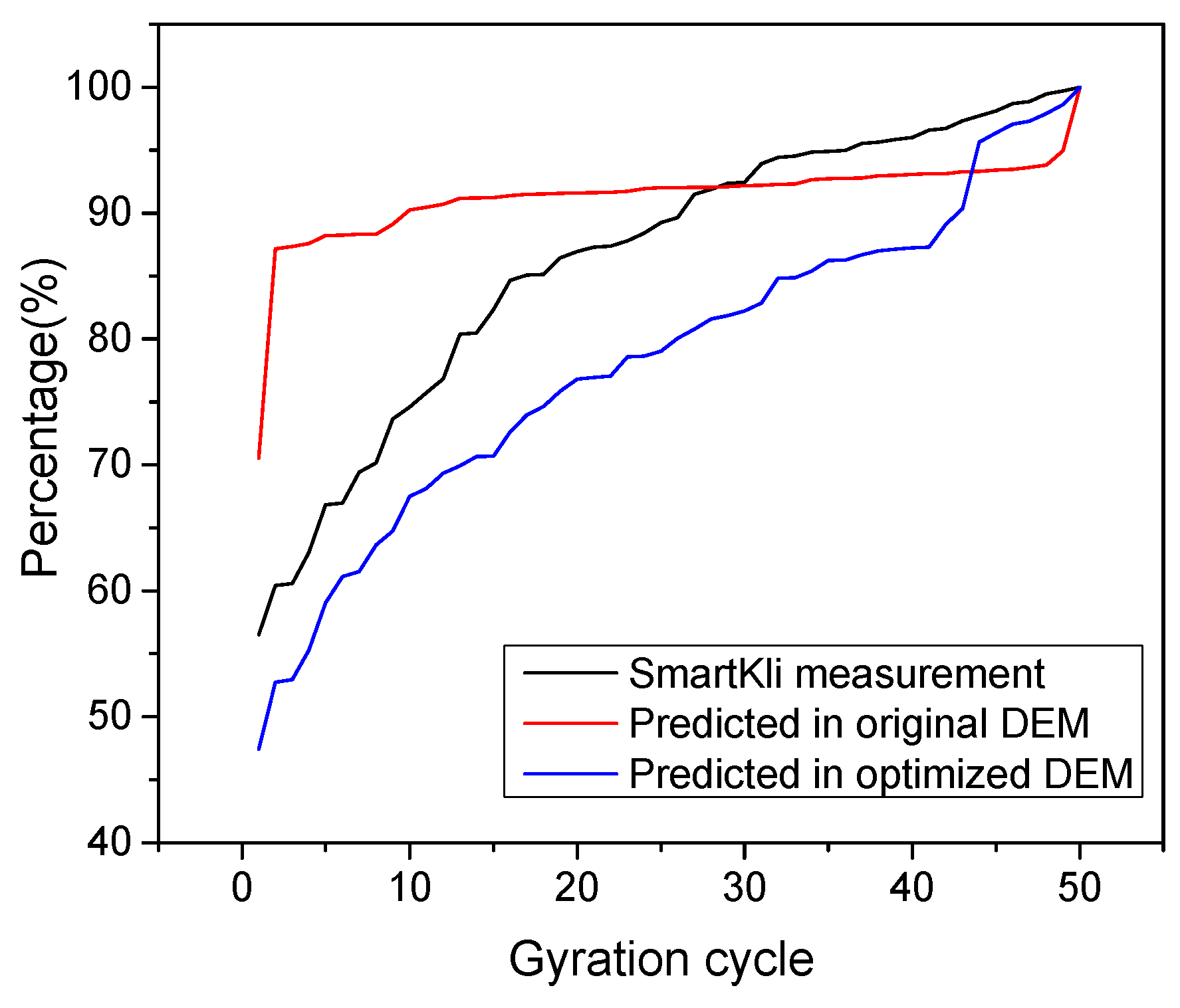
3.2. Evaluation of the Optimization Effect
3.2.1. Optimization of the SmartKli Particle Motion
3.2.2. Optimization of the Coarse Aggregate Particle Motion
3.2.3. Representativeness of the SmartKli Simulation Ball to General Coarse Aggregate Particles
3.3. Evaluation of the Optimized DEM Model in Predicting the Compaction Status
4. Conclusions and Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sadasivam, S. Evaluation of the Effects of Compaction Methods on the Predicted Performance of Superpave Mixtures. Ph.D. Thesis, North Carolina State University, Raleigh, NC, USA, 2004. [Google Scholar]
- Wang, X.; Shen, S.; Huang, H.; Yu, S. Understanding the Role of Particle Rotation in Asphalt Mixture Compaction by Tracking Coarse Aggregate Movement. Constr. Build. Mater. 2023, 395, 132325. [Google Scholar] [CrossRef]
- Wang, X.; Shen, S.; Huang, H.; Zhang, Z. Towards smart compaction: Particle movement characteristics from laboratory to the field. Constr. Build. Mater. 2019, 218, 323–332. [Google Scholar] [CrossRef]
- Masad, E.; Jandhyala, V.K.; Dasgupta, N.; Somadevan, N.; Shashidhar, N. Characterization of air void distribution in asphalt mixes using X-ray computed tomography. J. Mater. Civ. Eng. 2002, 14, 122–129. [Google Scholar] [CrossRef]
- Partl, M.N.; Flisch, A.; Jnsson, M. Gyratory compaction analysis with computer tomography. Road Mater. Pavement Des. 2003, 4, 401–422. [Google Scholar] [CrossRef]
- Sefidmazgi, N.R.; Tashman, L.; Bahia, H. Internal structure characterization of asphalt mixtures for rutting performance using imaging analysis. Road Mater. Pavement Des. 2012, 13 (Suppl. 1), 21–37. [Google Scholar] [CrossRef]
- Chen, J. Discrete Element Method (DEM) Analyses for Hot-Mix Asphalt (HMA) Mixture Compaction. Ph.D. Thesis, University of Tennessee, Knoxville, TN, USA, 2011. [Google Scholar]
- Chen, J.; Huang, B.; Shu, X. Air-void distribution analysis of asphalt mixture using discrete element method. J. Mater. Civ. Eng. 2013, 25, 1375–1385. [Google Scholar] [CrossRef]
- Gong, F.; Zhou, X.; You, Z.; Liu, Y.; Chen, S. Using discrete element models to track movement of coarse aggregates during compaction of asphalt mixture. Constr. Build. Mater. 2018, 189, 338–351. [Google Scholar] [CrossRef]
- Liu, W.D.; Gong, X.; Xiong, J.P.; Zhou, S.B. Analysis of influence of aggregate stiffness on coarse aggregate movement of asphalt mixture. IOP Conf. Ser. Earth Environ. Sci. 2020, 510, 052014. [Google Scholar] [CrossRef]
- Wang, X.; Shen, S.; Huang, H.; Almeida, L.C. Characterization of particle movement in Superpave gyratory compactor at meso-scale using SmartRock sensors. Constr. Build. Mater. 2018, 175, 206–214. [Google Scholar] [CrossRef]
- Wang, X.; Shen, S.; Huang, H. Meso-Scale Kinematic Responses of Asphalt Mixture in Both Field and Laboratory Compaction. Transp. Res. Rec. 2021, 2675, 1631–1642. [Google Scholar] [CrossRef]
- Dan, H.-C.; Yang, D.; Zhao, L.-H.; Wang, S.-P.; Zhang, Z. Meso-scale study on compaction characteristics of asphalt mixtures in Superpave gyratory compaction using SmartRock sensors. Constr. Build. Mater. 2020, 262, 120874. [Google Scholar] [CrossRef]
- Yu, S.; Shen, S.; Steger, R.; Wang, X. Effect of warm mix asphalt additive on workability of asphalt mixture: From particle perspective. Constr. Build. Mater. 2022, 360, 129548. [Google Scholar] [CrossRef]
- Yu, S.; Shen, S. Compaction Prediction for Asphalt Mixtures Using Wireless Sensor and Machine Learning Algorithms. IEEE Trans. Intell. Transp. Syst. 2022, 24, 778–786. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, X.; You, Z.; Yao, S.; Gong, F.; Wang, H. Discrete element modeling of realistic particle shapes in stone-based mixtures through MATLAB-based imaging process. Constr. Build. Mater. 2017, 143, 169–178. [Google Scholar] [CrossRef]
- Xing, C.; Liu, B.; Liu, H.; Zhang, L.; Xu, H.; Tan, Y. Topological characterization and typical topologies of disruption aggregates in asphalt mixture. J. Mater. Civ. Eng. 2024, 36, 04024158. [Google Scholar] [CrossRef]
- Komaragiri, S.; Gigliotti, A.; Bhasin, A. Feasibility of using a physics engine to virtually compact asphalt mixtures in a gyratory compactor. Constr. Build. Mater. 2021, 308, 124977. [Google Scholar] [CrossRef]
- Yu, H.; Shen, S. Impact of aggregate packing on dynamic modulus of hot mix asphalt mixtures using three-dimensional discrete element method. Constr. Build. Mater. 2012, 26, 302–309. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, S.; Ge, D.; Jin, D.; You, Z. Investigation of asphalt mixture internal structure consistency in accelerated discrete element models. Constr. Build. Mater. 2020, 244, 118272. [Google Scholar] [CrossRef]
- Tan, Y.; Liang, Z.; Xu, H.; Xing, C. Research on Rutting Deformation Monitoring Method Based on Intelligent Aggregate. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22116–22126. [Google Scholar] [CrossRef]
- Tan, Y.; Liang, Z.; Xu, H.; Xing, C. Internal deformation monitoring of granular material using intelligent aggregate. Autom. Constr. 2022, 139, 104265. [Google Scholar] [CrossRef]
- Zhang, C.; Ildefonzo, D.G.; Shen, S.; Wang, L.; Huang, H. Implementation of ensemble Artificial Neural Network and MEMS wireless sensors for In-Situ asphalt mixture dynamic modulus prediction. Constr. Build. Mater. 2023, 377, 131118. [Google Scholar] [CrossRef]
- Zhang, C.; Shen, S.; Huang, H.; Wang, L. Estimation of the Vehicle Speed Using Cross-Correlation Algorithms and MEMS Wireless Sensors. Sensors 2021, 21, 1721. [Google Scholar] [CrossRef] [PubMed]
- Shi, B.; Shen, S.; Liu, L.; Wang, X. Estimation of vehicle speed from pavement stress responses using wireless sensors. J. Transp. Eng. Part B Pavements 2021, 147, 04021028. [Google Scholar] [CrossRef]
- Itasca-Consulting-Group. PFC5.0 Suite Documentation 2014. Minneapolis, Minnesota 55415. Available online: https://docs.itascacg.com/pfc600/common/docproject/source/manual/program_guide/program_guide.html?node66 (accessed on 6 December 2024).
- Shen, S.; Yu, H. Characterize packing of aggregate particles for paving materials: Particle size impact. Constr. Build. Mater. 2011, 25, 1362–1368. [Google Scholar] [CrossRef]
- Liu, S.; Huang, H.; Qiu, T.; Shen, S. Sensing mechanism and real-time computing for granular materials. J. Comput. Civ. Eng. 2018, 32, 04018023. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and predicted problems. J. Fluids Eng. 1960, 82, 25–45. [Google Scholar]
- Wang, X.; Wang, Z.; Luo, X. Characterization of asphalt mixture compaction at particle-scale using discrete element model optimized by real-time smartrock sensing data (No. TRBAM-25-03625). In Proceedings of the Transportation Research Board 104th Annual Meeting Compendium of Papers, Washington, DC, USA, 5–9 January 2025. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sieve Sizes (mm) | % Passing |
|---|---|
| 19 | 100 |
| 12.5 | 98 |
| 9.5 | 88 |
| 4.75 | 54 |
| 2.36 | 35 |
| 1.18 | 21 |
| 0.6 | 14 |
| 0.3 | 10 |
| 0.15 | 8 |
| 0.075 | 6.3 |
| Asphalt type | PG 64-22 |
| Asphalt content | 5.8% |
| Anti-strip | 0.3% |
| Design air void | 4% |
| VMA (voids in mineral aggregate) | 16% |
| VFA (voids filled with asphalt) | 74.8% |
| Normal Stiffness | Normal Viscosity | Shear Stiffness | Shear Viscosity | |
|---|---|---|---|---|
| Kelvin | Kkn | Ckn | Kks | Cks |
| Maxwell | Kmn | Cmn | Kms | Cms |
| Parameter | AC |
|---|---|
| Ball size range (mm) | 2.36–19 |
| Kkn, Kks (N/m) | 6.4 × 103, 2.1 × 103 |
| Ckn, Cks (N/m) | 88 |
| Kmn, Kms (N/m) | 54 |
| Cmn, Cms (N/m) | 35 |
| Friction | 21 |
| Damping ratio | 14 |
| Percentage of simulated asphalt matrix (%) | 10 |
| Gyration accelerated scale factor | 8 |
| Transition Cycle N | Upper Particle | Lower Particle |
|---|---|---|
| Lab-trial 1 | 30 | 20 |
| Lab-trial 2 | 20 | 10 |
| DEM-trial 1 | 3 | 3 |
| DEM-trial 2 | 4 | 3 |
| Transition Cycle N | Original DEM | Optimized DEM | SmartKli Sensor |
|---|---|---|---|
| Upper SmartKli | 3 | 23 | 30 |
| Lower SmartKli | 3 | 12 | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Wang, Z.; Luo, X. Real-Time Optimization of Discrete Element Models for Studying Asphalt Mixture Compaction Characteristics at the Meso-Scale. Sensors 2025, 25, 638. https://doi.org/10.3390/s25030638
Wang X, Wang Z, Luo X. Real-Time Optimization of Discrete Element Models for Studying Asphalt Mixture Compaction Characteristics at the Meso-Scale. Sensors. 2025; 25(3):638. https://doi.org/10.3390/s25030638
Chicago/Turabian StyleWang, Xue, Zifang Wang, and Xuanye Luo. 2025. "Real-Time Optimization of Discrete Element Models for Studying Asphalt Mixture Compaction Characteristics at the Meso-Scale" Sensors 25, no. 3: 638. https://doi.org/10.3390/s25030638
APA StyleWang, X., Wang, Z., & Luo, X. (2025). Real-Time Optimization of Discrete Element Models for Studying Asphalt Mixture Compaction Characteristics at the Meso-Scale. Sensors, 25(3), 638. https://doi.org/10.3390/s25030638