In this chapter data interpretation analysis and discussion are presented based on objective and subjective acquired data.
3.1. Objective Data Assessment
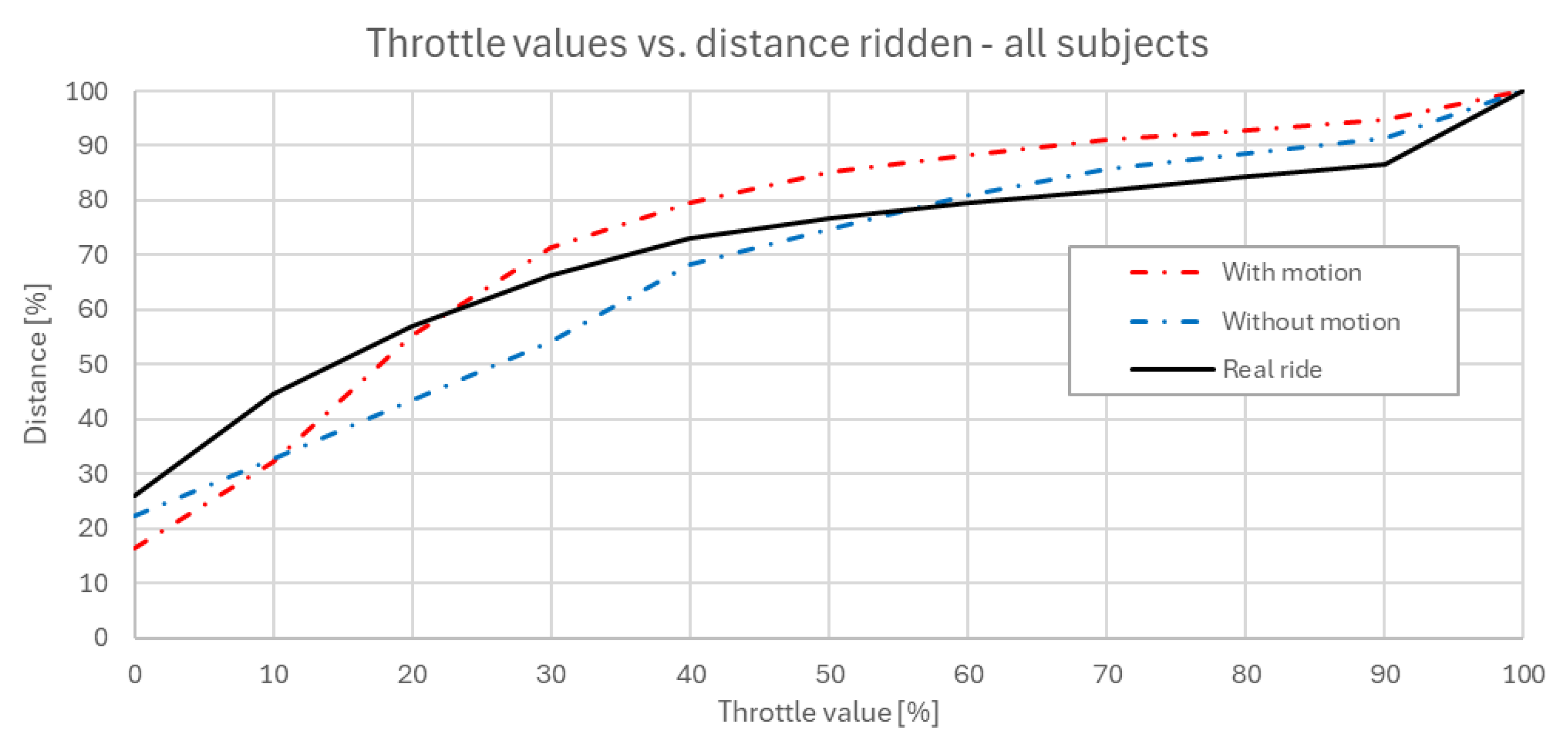
Figure 8 shows how much throttle (value in %) corresponds to the number of segments ridden by riders. Due to different lengths and numbers of segments of each rider, this number was normalized and expressed in percents. The curve is ascensive due to its cumulative sum character. Data suggests that the behavior of riders when controlling the throttle in the simulator does not differ significantly from real-life riding. The differences between riding with and without the motion platform do not manifest as a consistent change in average performance or trend, but rather in the variability of control.
This trend suggests that riders were more conservative in their throttle application when receiving full motion feedback, likely due to an increased perception of both accelerations, longitudinal and lateral. The combined effect of visual and inertial cues appears to enhance the realism of the ride, causing participants to modulate throttle input more carefully. In general, riding with an active motion platform can be characterized as a deliberate in the way of throttle opening application.
The following
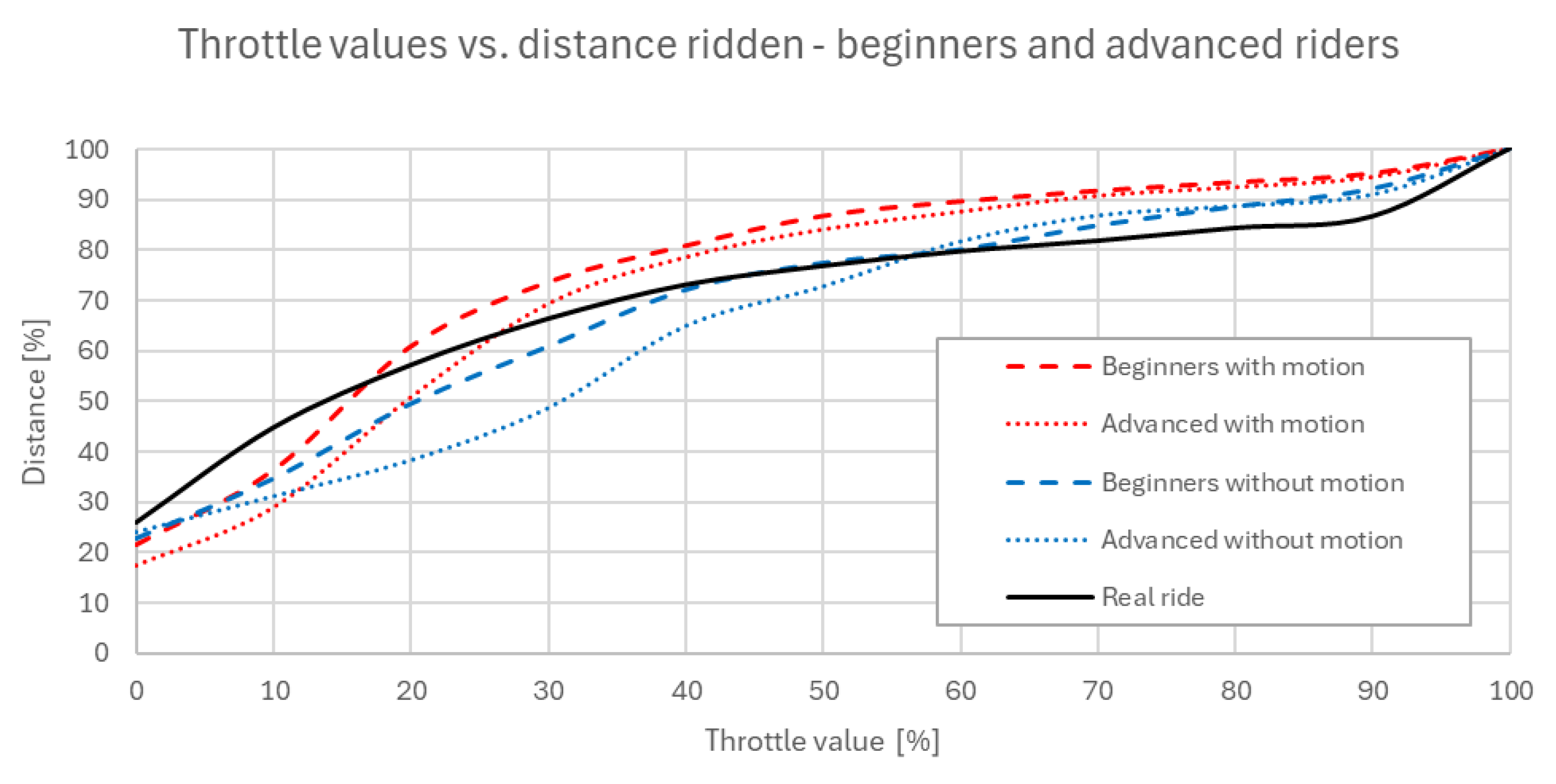
Figure 9 provides a more detailed examination of the curves presented in
Figure 7, but separated by rider experience level: beginners (up to 5 years of active practice) and advanced riders (more than 5 years of active practice). The motion platform appears to bring results of both groups of riders closer together in terms of their throttle control behavior.
To sum up riders’ throttle control behavior in the experiment, higher throttle openings, which occur over shorter sections of the ridden distance, show a closer resemblance between the real ride and the simulator ride with active motion platform. On the other hand, lower throttle values, which appear over a larger portion of the ridden trajectory, result in the real ride more closely aligning with the simulator ride without the active motion platform. This indicates that in less dynamic phases, the absence of motion cues has a smaller impact on rider behavior. Overall, the real ride pattern lies in between the two simulated conditions, sharing characteristics with both, but leaning toward the motion-enabled simulation in high-intensity sections and the passive one in steadier phases. This suggests that the simulator in both configurations provides a close approximation of real riding behavior.
The following
Table 3 summarizes the results of the simulator-based experiment, expressed as mean values across all participants. The table is structured according to three minimal riding scenarios and further segmented by the motion platform condition—either active or inactive. Each participant performed two measured rides with and without the motion platform activated. To evaluate the significance of the effect of motion and consistency of data, a paired
t-test was performed. The paired sample
t-tests within each condition (with and without motion) generally showed no statistically significant differences between the first and second ride, suggesting that participants adapted to both setups. The results indicate that in the absence of motion feedback, riders tended to perform sharper maneuvers. This observation is supported by higher values of resultant acceleration in the static scenario. Additionally, higher average, entry, and exit speeds were observed when the motion platform was disabled. Also, average speed and exit speed are consistently affected by the presence of motion, with significant
p-values in all sectors. Additionally, average total acceleration also shows strong significance in Sectors 1 and 3 (
p = 0.003 and
p = 0.004), confirming that motion feedback leads to smoother, less aggressive riding. These findings suggest that riders may not fully perceive the dynamic behavior of the motorcycle without physical motion cues, even when immersed in a visually comprehensive virtual environment delivered via an HMD.
The table also includes lean angle values for each maneuver, as presented to the rider through the HMD. These lean angles were intentionally reduced within horizon tilts associated with higher lean angles. These angles were found to increase the symptoms of motion sickness in experiment participants. This adjustment was implemented to ensure greater user comfort while maintaining sufficient visual cues for cornering perception.
The following
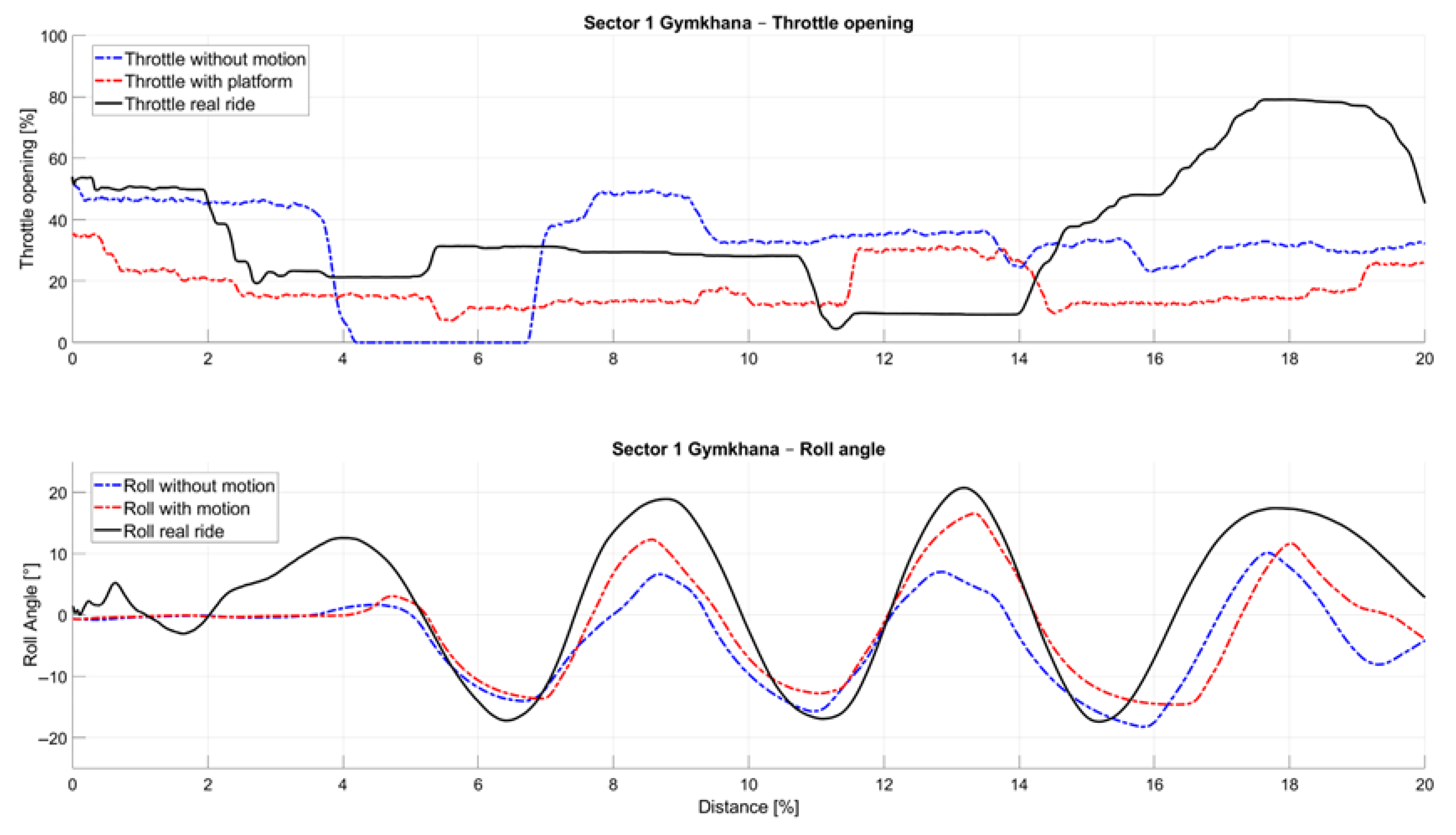
Figure 10 presents a detailed look into the Sector 1 Gymkhana of the selected advanced rider and brings the comparison of both simulated and real polygon rides. In the scenario without an active motion platform, throttle control exhibits greater uncertainty, reflected in a less precise and more variable throttle opening pattern. This is indicative of a diminished perception of acceleration forces, which likely contributes to inconsistent rider input. Conversely, when the motion platform is active, throttle modulation tends to be overly cautious, suggesting that the enhanced vestibular feedback leads riders to adopt a more conservative approach to throttle opening. This effect is particularly visible during initial acceleration phases, where the simulation without the active motion platform reveals a tendency toward higher throttle openings followed by abrupt closures.
A detailed look at the roll angle in the
Figure 10 data reveals that the counter-steering effect, clearly present at the beginning of the section in the real-ride measurements, is difficult to reproduce in both simulator conditions and is absent in the simulated rides. Furthermore, when examining the roll angles themselves, a noticeable offset is observed: the lowest lean values occur in the simulation without the active motion platform, while higher lean angles are recorded during rides with the active motion platform that are closer to angles measured in real rides. These findings suggest that the presence of the motion platform enhances the fidelity of lateral dynamics representation.
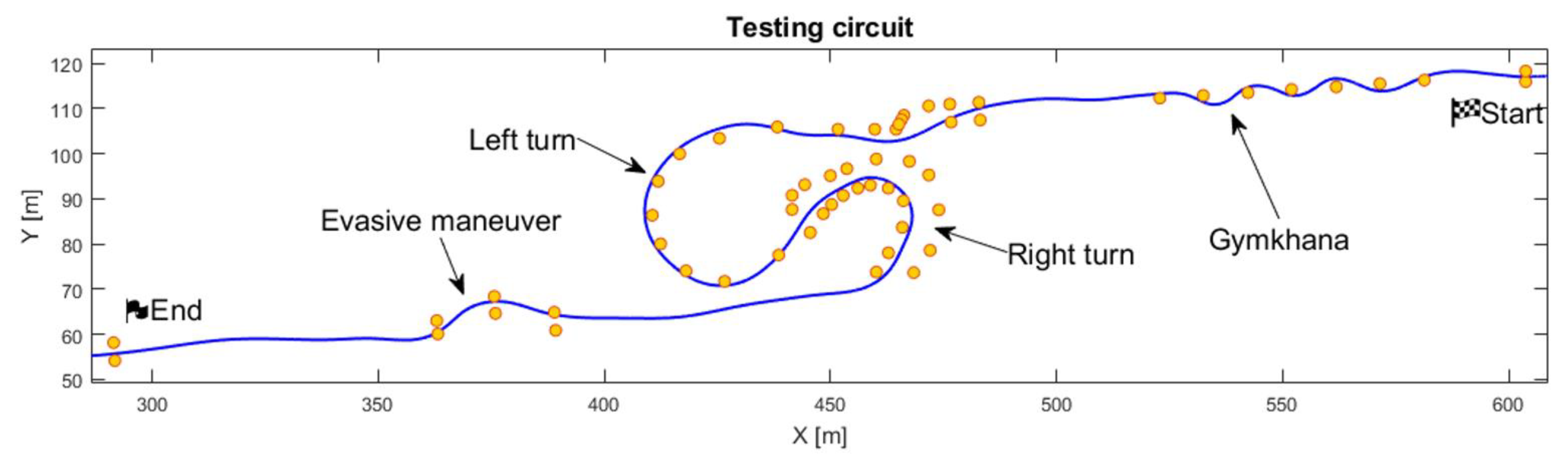
An illustration of the overall trajectories of a selected advanced rider is presented in
Figure 11. The real-ride trajectory is burdened with inaccuracies arising from GNSS signal limitations during the recording. Despite this, the overall shape of the trajectories is mutually consistent, indicating that the simulated rides—both with and without motion platform activation—reflect the dynamics of real-world motorcycle operation with sufficient fidelity.
The following
Table 4 shows a comparison of the times achieved by a group of advanced riders in individual track sectors during both examined, simulated, and real riding conditions: without an active motion platform, with an active motion platform, and during a real ride.
In Sector 1, riders completed the sector faster without the motion platform, while the times with the motion platform and during the real ride were very similar, but with higher variance. This indicates that the motion platform simulation approximates the real riding experience in this segment more closely than the non-motion condition. In Sector 2, a similar trend is observed where riding using the simulator with motion is closer to the real ride. It is also repeated that data from the active motion platform scenario and real ride show higher data variance. In Sector 3, real rides took significantly longer than either simulation, with the motion platform condition showing slightly longer times than the non-motion condition. In this sector, riders tended to accelerate much stronger at the end of the evasive maneuver, which was most likely caused by nearing the end of the tested scenario.
3.2. Subjective Data Assessment
The next part of data interpretation analysis and discussion focuses on subjective data gathered during the simulator riding experiment. Data for the presented assessments are based on the Experiment Questionnaire in
Appendix A.
Overall comparison of the tested scenarios evaluates questions from 1 to 14 in
Figure 12. Questions 6 and 9 are targeted directly to motion platform participants, thus there are results presented only for the simulator ride with the active motion platform. Subjects of the questionnaire responded on scale from 1 to 9. Results are based on 13 subjects with a mean age of 31.77 years and mean value of riding practice 8.50 years. Furthermore, subjects are divided into two groups of riders, up to 5 years of practice and more than 5 years of practice, for detailed evaluation.
Figure 12 shows the evaluation of the longitudinal and lateral dynamic perceptions of all subjects. Subjective questionnaire ratings show that the active motion platform significantly influences the perception of key aspects of the simulated ride in terms of speed perception, surface roughness, braking, and acceleration. This suggests that the motion platform significantly contributes to physical feedback during changes in speed and longitudinal vehicle dynamics. In terms of lateral dynamics evaluation, we observe similar results for both analyzed simulator rides. Focusing on the evaluation of the motion platform effects when leaning (Question 9), we can compare it with the result of motion platform feedback while braking and accelerating (Question 6). From this point of view, we observe a slightly lower value by 0.9. Overall, similar results were obtained for questions of visualization, handlebars, footpeg effects, and feedback across both types of rides.
The following
Figure 12 summarizes the subjective ratings of three types of minimal scenarios (Gymkhana, left/right turns, and evasive maneuvers)—with less than 5 years of practice and with more than 5 years of practice—and compares the results when riding without and with the active motion platform. Across all maneuver types, a consistent trend can be observed: activating the motion platform tends to increase the perceived difficulty of the task. For example, in the Gymkhana maneuver, the average subjective difficulty rises from 4.4 to 5.6 when motion is enabled. Similar increases are observed in left/right turns (from 4.8 to 5.7) and evasive maneuvers (from 4.5 to 5.5). These results suggest that the additional input provided by the motion system may challenge the rider’s ability to maintain control, particularly in more complex maneuvers. The perception of control tends to decrease slightly with the motion platform across tasks, with the most notable reduction occurring in Gymkhana (from 6.6 to 5.7). Ratings imply that although the motion system enhances realism, it may also introduce a higher load that affects riders’ confidence and execution. Similarly, perceived riding smoothness consistently declines in all maneuver types when motion is active. The drop is most evident in Gymkhana (from 6.1 to 5.1) and evasive maneuvers (6.4 to 5.6), likely due to the increased demand for the precise coordination of movements in maneuvers. In contrast, the change is less pronounced in turning (5.7 to 5.5), indicating that platform-induced motion may have a less disruptive effect in this narrower task.
It is important to note that several participants reported greater ease of control when riding without the motion activated platform. However, this came at the cost of perceived realism—riders frequently described the motionless simulation as lacking in authenticity, particularly during dynamic maneuvers. Furthermore, a small number of subjects experienced mild symptoms of discomfort or nausea during rides with the active motion platform.
Comparing subjective data from
Figure 13 with results from
Table 3, riders clearly perceived the motion ride as more difficult, less smooth, and with less control, which corresponds to the decrease in speed and average and max accelerations in data in the Gymkhana sector. A similar effect was observed in the second and third sector. Although the feeling of control was almost the same, riders reported higher difficulty and lower smoothness, which again correlates with a decrease in speed and average and maximal accelerations. The motion platform therefore enhances the realism of the simulation but also imposes greater demands on the rider—demands that are reflected both in their perceived experience and in their measurable performance.
The following
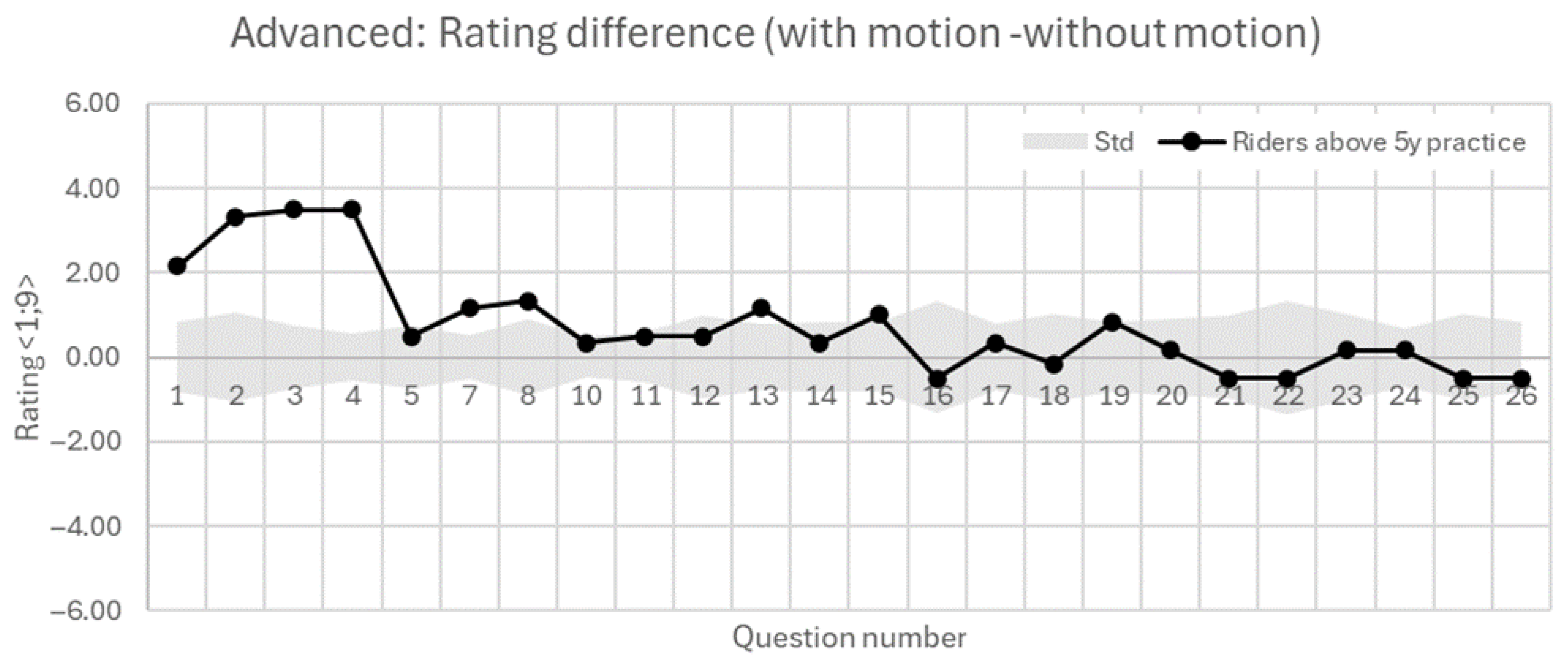
Figure 14 and
Figure 15 show the results of beginners and advanced riders based on their active motorcycle riding practice in years. These figures show the mutual difference in the evaluations of riding with the motion platform activated minus riding without the motion platform. In terms of perceptions of speed, braking, and acceleration, advanced riders (>5 years) show substantially greater increases in perceived speed (+2.17), braking (+3.5), and acceleration (+3.5) due to motion, compared to less experienced riders (<5 years), who show more moderate increases (+0.57, +1.29, and +1.71, respectively). This suggests that experienced riders are more sensitive to motion cues, potentially due to their stronger internal models of real riding dynamics.
Advanced riders report improved feelings of straight-line riding and throttle adequacy with motion (+1.17, +1.33), while beginners show small or negative changes (−0.71, −0.57), possibly indicating initial confusion or difficulty adapting to motion feedback. Beginners report a negative change in handlebar feedback (−0.57), whereas experienced riders report a slight improvement (+0.5). Footpeg feedback differences are minimal across both groups. Furthermore, beginners report a drop in the overall feeling of turning with motion (−1.43), whereas experienced riders improve (+1.17). Visual leaning perception increases only marginally in both groups. It is important to mention that these evaluations differences are, in general, very small, and are at the boundary of the standard deviation interval.
Focusing on minimal scenario specifics, we observe very small mutual differences at the boundary of the standard deviation interval as well. Both groups show small increases in perceived difficulty and minimal change in control and smoothness while evaluating left and right turning. In the case of Gymkhana, it is worth mentioning that the feeling of control drops significantly for beginners (−1.71), but only slightly for advanced riders (−0.5). The highest differences occur in evasive maneuver. Beginners show increased difficulty (+2) and declines in performance and smoothness (−0.86, −1.0), while experienced riders show only minor effects.
All in all, to compare both groups, advanced riders (>5 years) appear to benefit more from motion-platform activation, reporting slightly higher realism, control, and improved perception in key domains like speed, braking, and cornering. Less experienced riders (≤5 years) on the other hand, while noticing motion effects more, tend to struggle with control and performance perception in more complex tasks. Their feedback suggests possible cognitive overload or mismatch with expectations, especially in technical exercises. Both subjective evaluations from
Figure 14 and
Figure 15 and objective data from
Figure 9 show that the active motion platform increases the immersivity of the simulated ride, which is reflected in more careful throttle opening. Beginners are more sensitive to physical feedback in this regard. Moreover, in the case of beginners in the static mode, it was observed that their perception of speed—both in absolute terms and in terms of visual speed variation—was generally lower compared to advanced riders. This was accompanied by a subjectively reported higher perception of deceleration, which may have resulted in more frequent or pronounced throttle overshooting, potentially linked to an increased confidence in the braking effect.
Generally, motorcycle riding is inherently demanding, and mastering the simulator requires a dedicated learning process. Initially, novice riders tend to simplify their control strategies to manage the task more easily. Experienced riders, on the other hand, strive to replicate real motorcycle riding techniques as closely as possible within the simulator environment. However, this does not guarantee that over time they will maintain a realistic riding style; without sufficient challenge or realistic feedback, even skilled riders may gradually adopt a more “arcade-like” style of control. The desire to ride exactly as on their own motorcycle often conflicts with the limitations of the simulator, and as a result, riders adapt their behavior towards a simplified, less realistic approach to control. This adaptation process highlights the importance of maintaining high-fidelity feedback and appropriate tasks to preserve realistic riding habits during simulator training.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}