
Research on the Optimization of the Electrode Structure and Signal Processing Method of the Field Mill Type Electric Field Sensor


Abstract
Highlights
- The law of the influence of the thickness of the sensor’s buckling electrode and the distance between the sensing electrode and the buckling electrode on the sensor’s sensitivity;
- The improved FFT-BP method for harmonic noise reduction.
- The electrode parameters of the field mill type electric field sensor have been optimized;
- The completed mathematical model of the input and output of the field mill type electric field sensor was established;
- A processing method for the output signal of the field mill type electric field sensor was studied, and the signal processing circuit was designed and optimized.
Abstract
1. Introduction
2. Structural Parameters Optimized by Field Mill Type Electric Field Sensors
2.1. The Structure and Measurement Principle of the Sensor
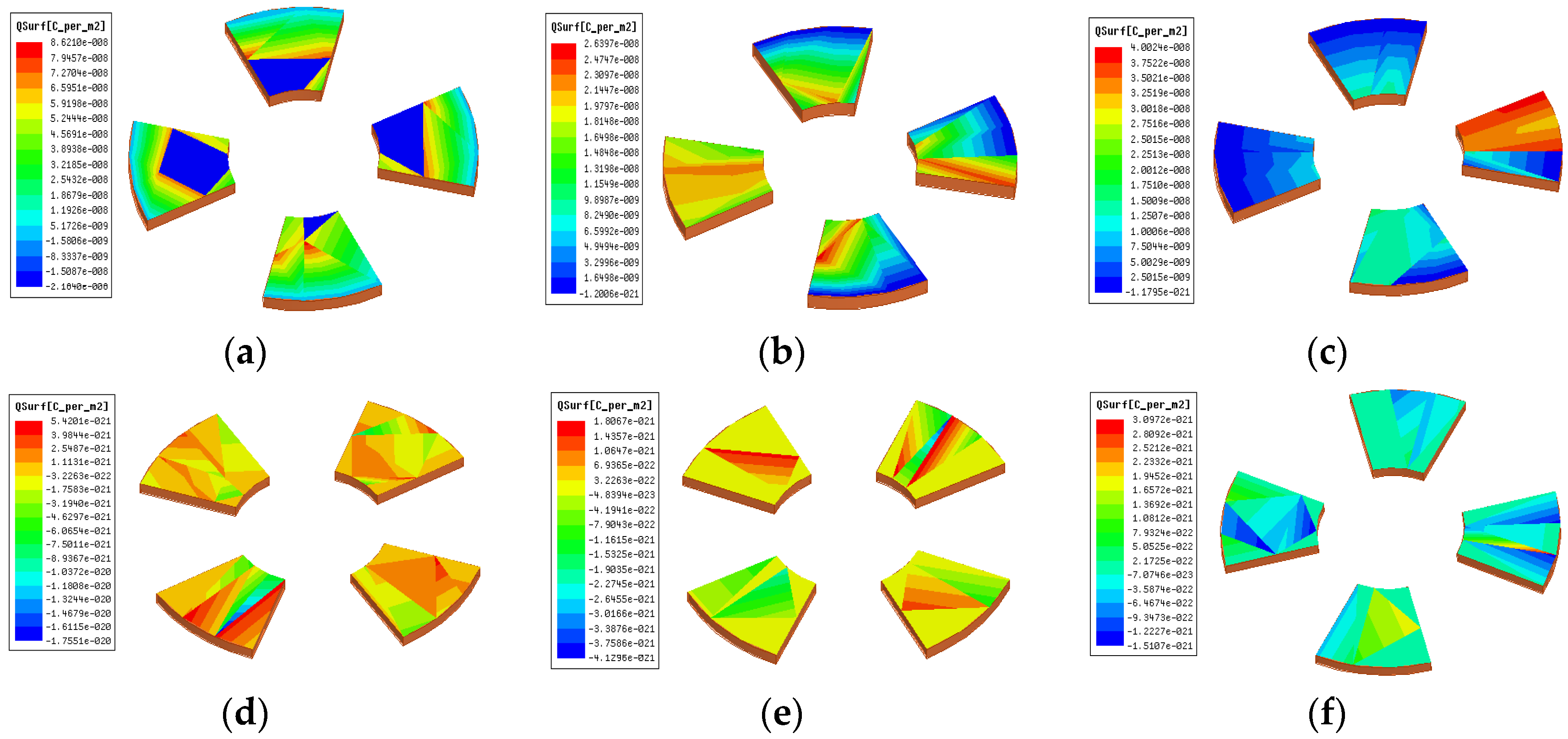
2.2. The Influence of the Thickness of the Sensor Bucking Electrode, the Distance Between the Induction Electrode, and the Bucking Electrode on the Sensitivity
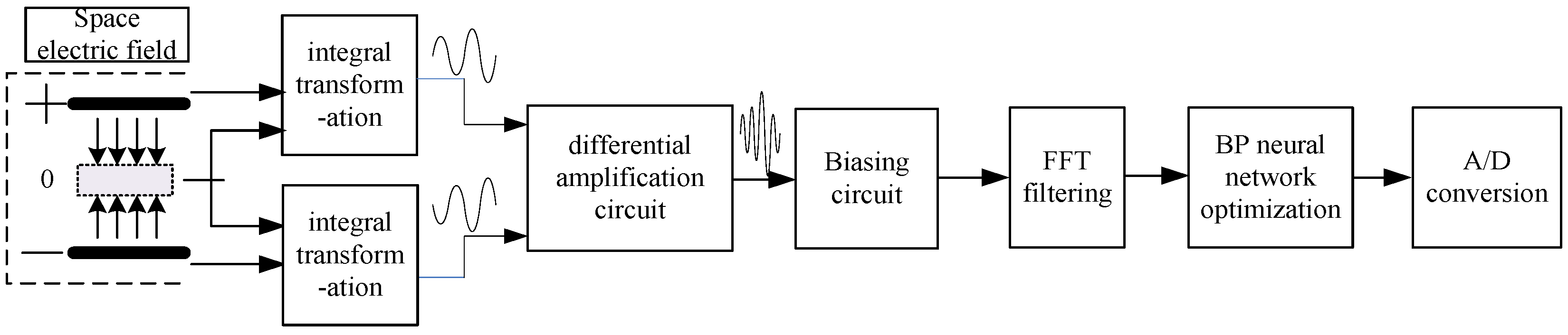
3. Signal Processing Method for Field Mill Type Electric Field Sensors
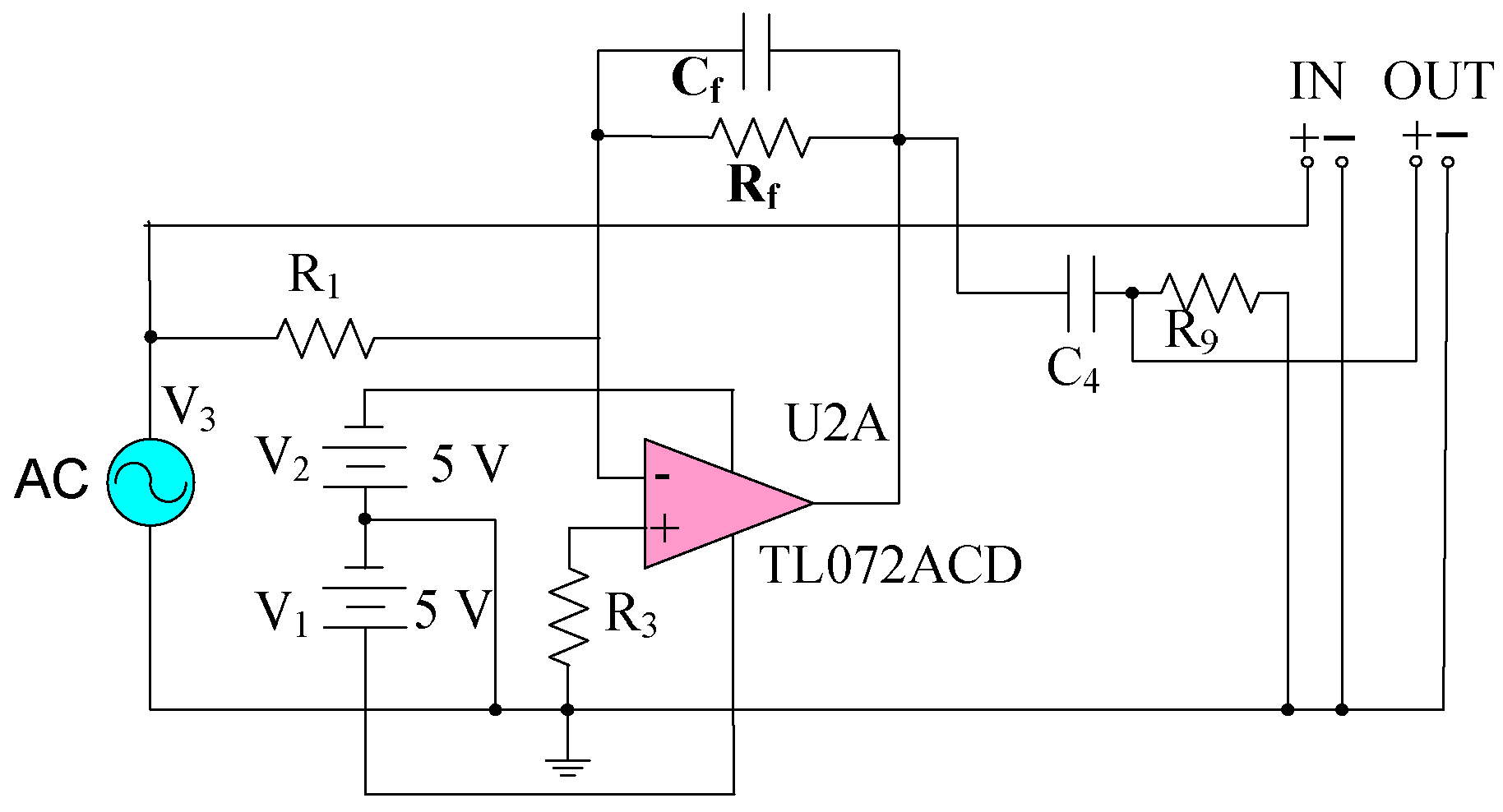
3.1. Pre-Integral Transformation Circuit
3.1.1. Analytical Model of Pre-Integral Transformation Circuit
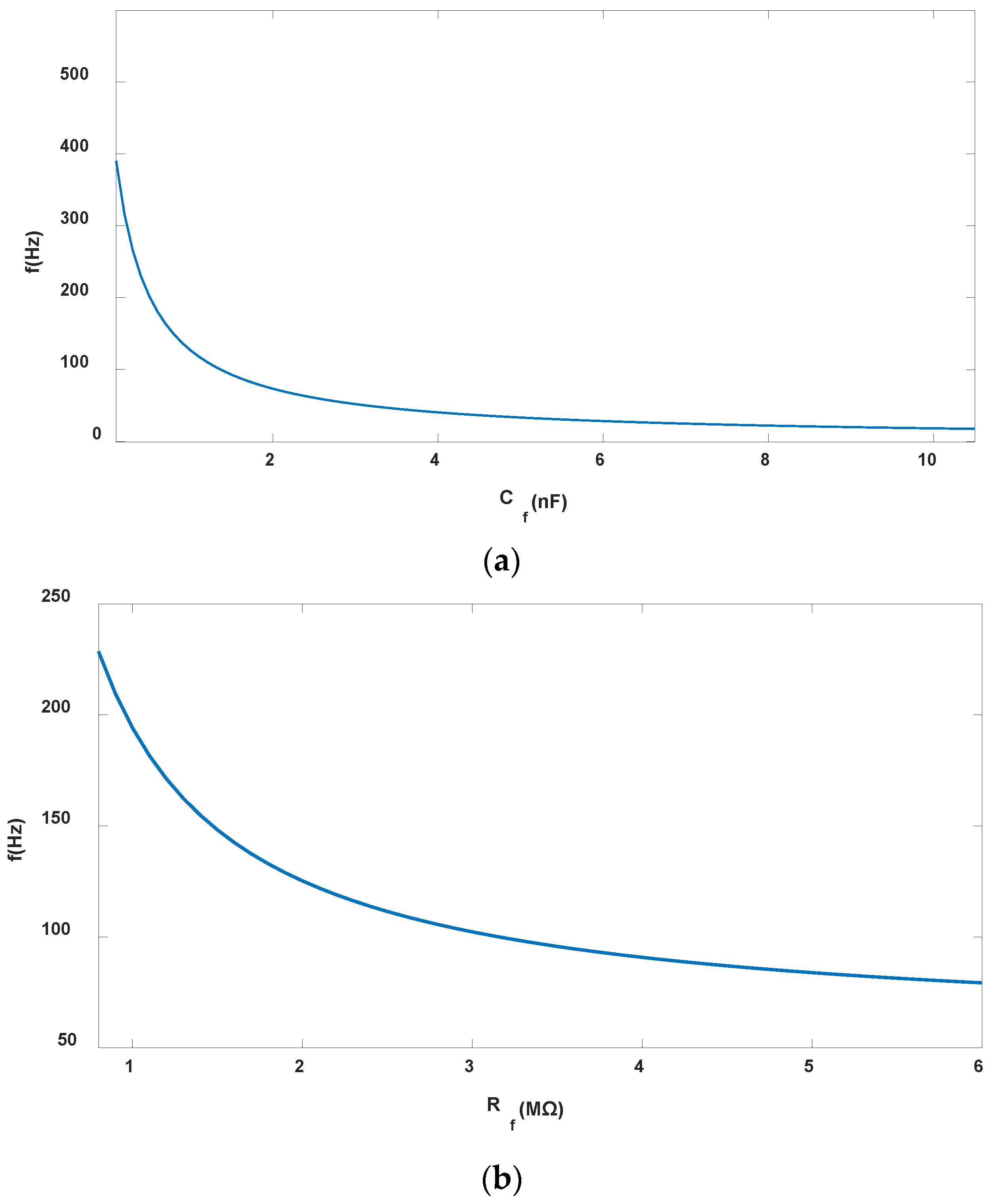
3.1.2. Parameter Optimization of the Pre-Integral Transformation Circuit
3.1.3. Noise Analysis of the Pre-Integral Transformation Circuit
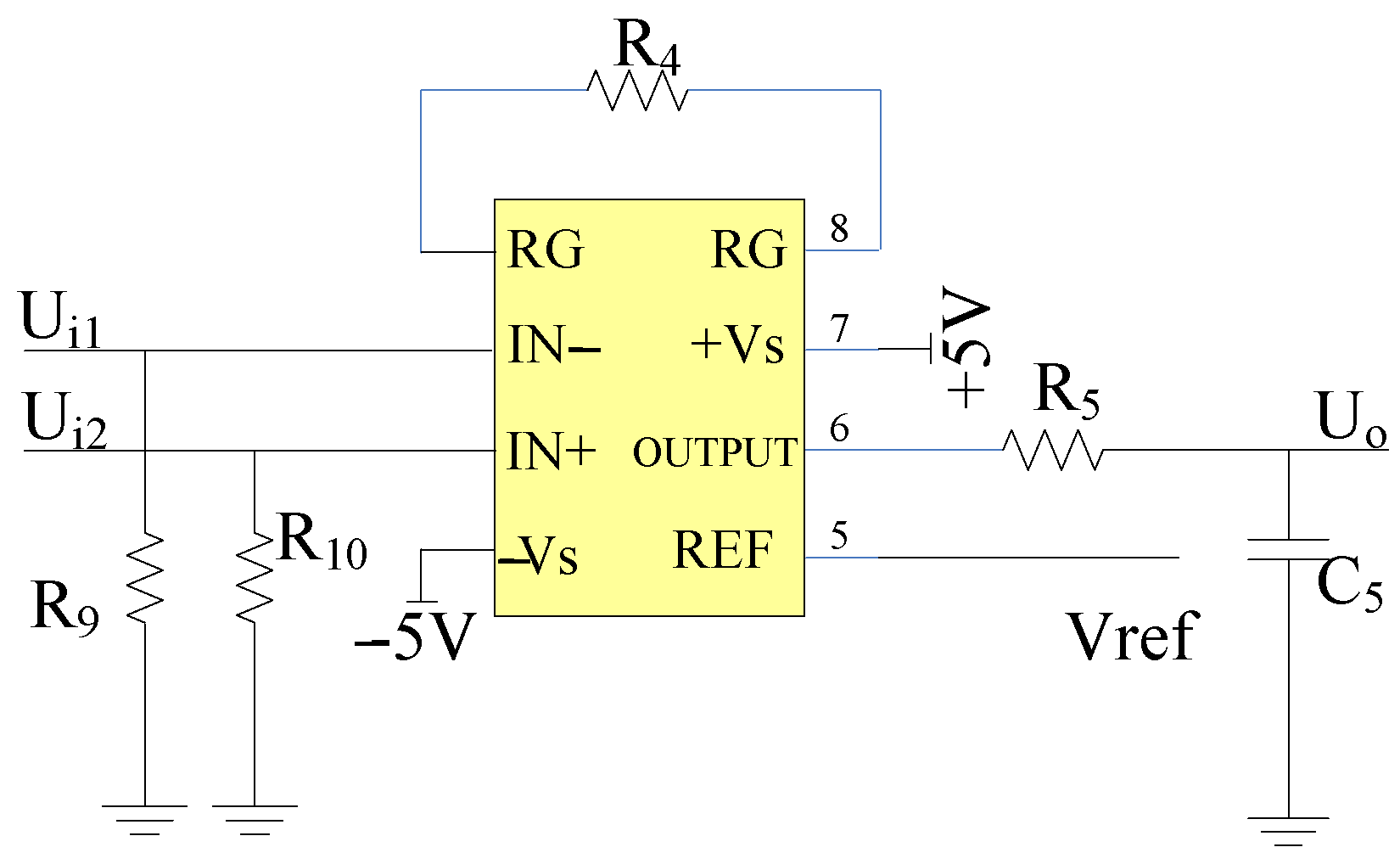
3.2. Parameters for Differential Amplification Circuit
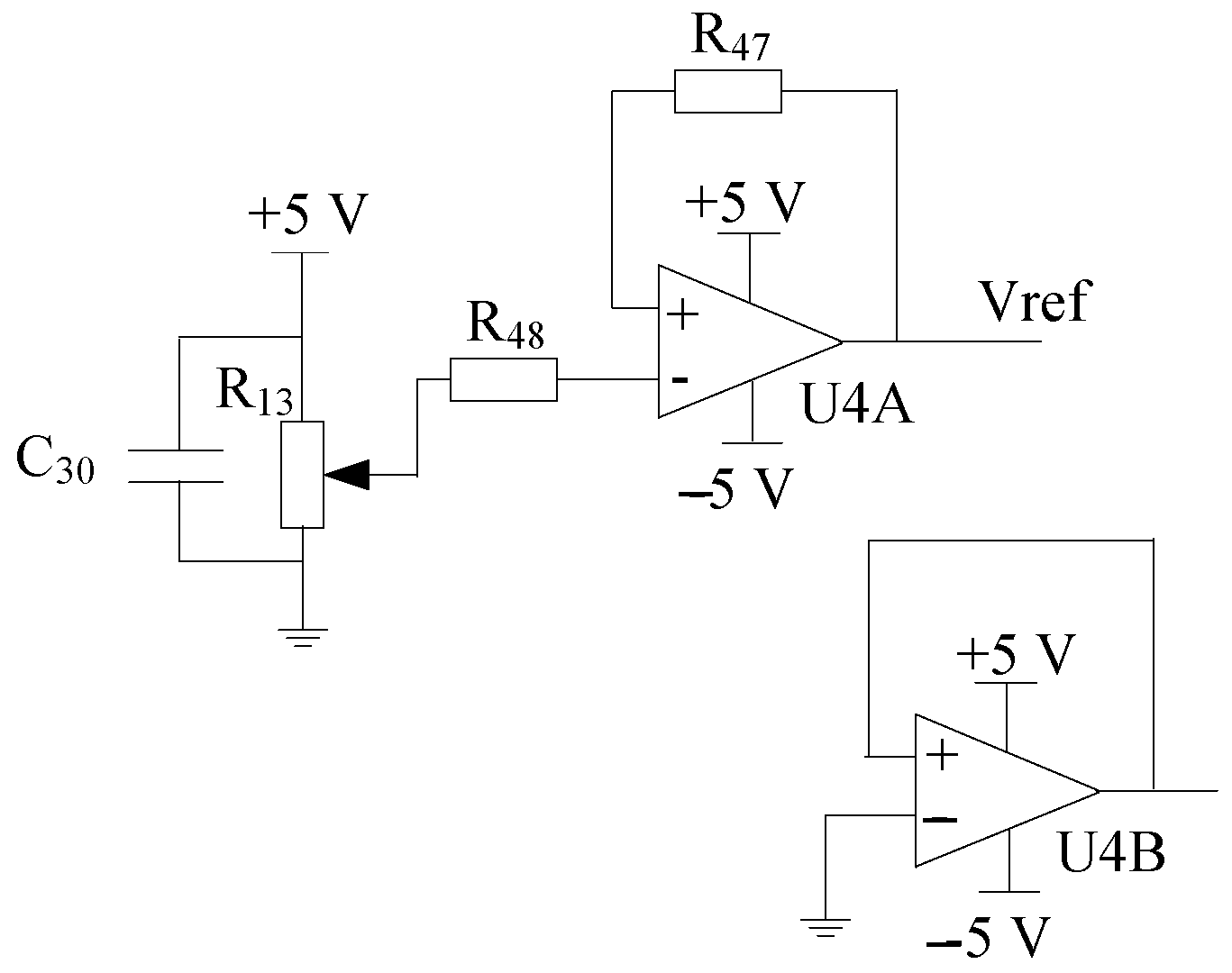
3.3. Biasing Circuit
4. Harmonic Amplitude Detection Method Based on the Improved FFT-BP
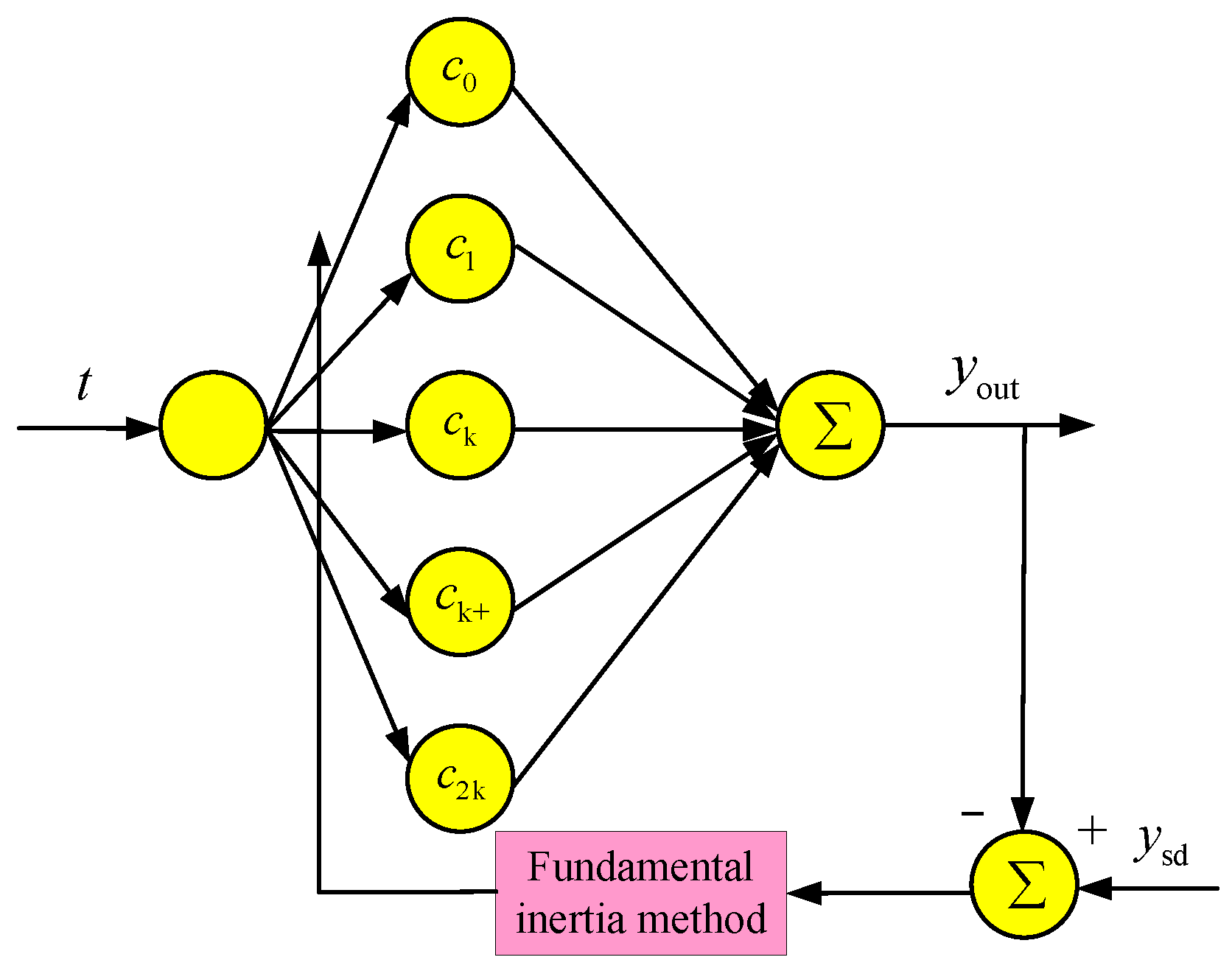
4.1. Improved FFT-BP
4.2. Measurement Experiment
5. Design of Power Supply System for Electric Field Sensor
5.1. The Design of the Power Module of the System
- (1)
- A power supply for amplifying the analog signal output by the sensor
- (2)
- Power supply for digital circuits
- (3)
- Power supply for brushless DC motors
5.2. Comparison of the Main Performance Parameters of Sensors
5.3. Atmospheric Electric Field Intensity Measurement Experiment
6. Conclusions
- (1)
- By analyzing the measurement principle of the field grinding electric field sensor, a mathematical model of the sensor’s induction electrode was established. Due to the edge effect of the electric field, the finite element analysis method was adopted, and the effect law that the thickness of the sensor bucking electrode and the distance between the bucking electrode and the induction electrode on the change of its surface charge were analyzed. On this basis, the influences of and on the sensor sensitivity were analyzed. Considering the sensitivity, the installation and manufacturing cost of the electrode comprehensively, the optimized structural parameters obtained are: , , , .
- (2)
- Aiming at the problem that the amplitude of the output signal of the sensor is weak, and effective amplitude measurement cannot be carried out, a weak signal amplification circuit including a pre-integral transformation circuit, a differential amplification circuit, and a biasing circuit was designed and studied. Firstly, the equivalent analytical model of the pre-integral transformation circuit was established, the effect of the feedback resistor and the integrating capacitor on the passband of the circuit was analyzed, according to the characteristics of the output signal generated by the sensor, the optimized parameters and were obtained, and the passband was controlled at , , the center frequency . The analytical model of pre-integral transformation circuit that was obtained by the optimized parameters, the sensitivity of the circuit was improved, the measurement resolution of the electric field intensity was 18.7 V/m. A noise model for the pre-integral transformation circuit was studied, under the action of the electric field in sunny conditions, the amplitude of the generated voltage signal was more than 70 times that of the noise signal, and the interference of thermal noise to the measurement system was reduced effectively. Meanwhile, a differential amplification circuit and a bias circuit were designed to meet the A/D conversion requirements.
- (3)
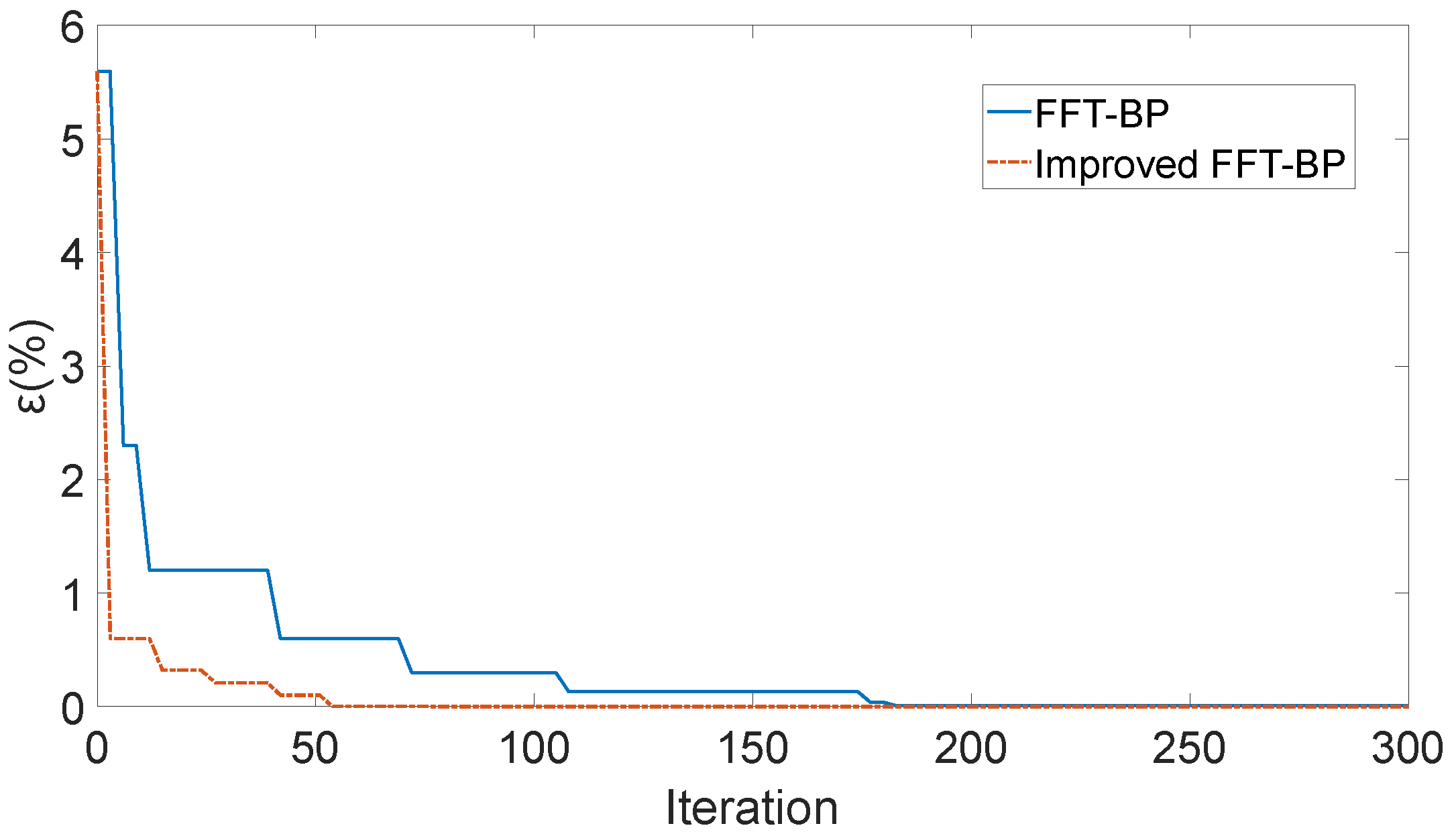
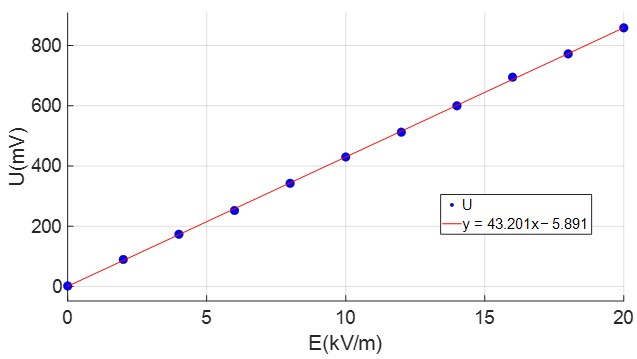
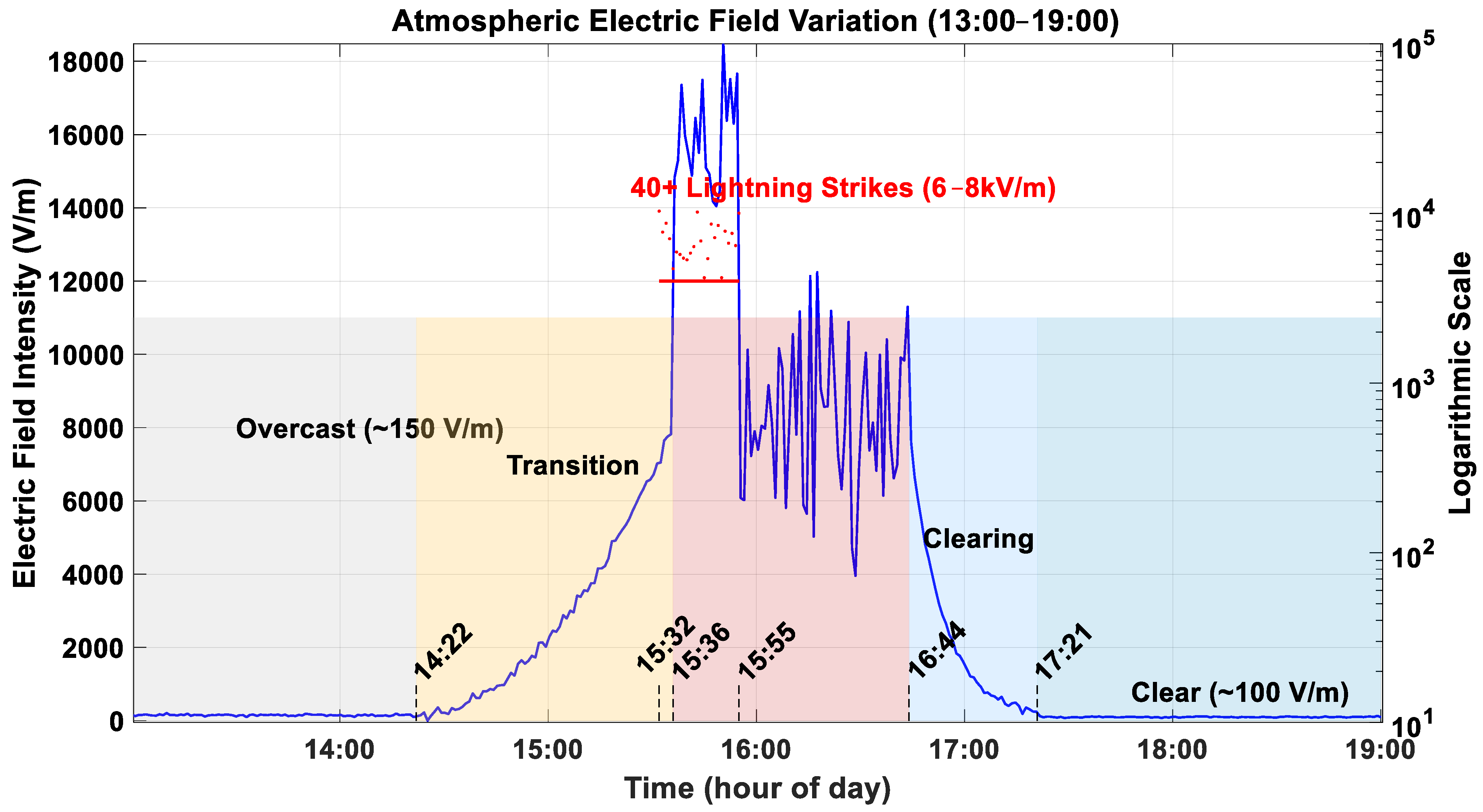
- An improved FFT-BP algorithm was proposed to detect the harmonic amplitude of the sensor output signal. Based on the parameters obtained from the FFT for harmonic preprocessing and setting the parameters of the BP network, the parameter iteration and search range of the BP network are restricted. The learning factor, momentum factor, and activation function are used to jointly adjust the BP network. The simulation results show that the harmonic amplitudes obtained by this method are more accurate than those of the traditional FFT method, and the amplitude error is controlled between 0.06% and 0.12%. Calibration experiments were conducted under a uniform electric field of known intensity, within the range of electric field intensity of 0~20 kV/m, the determinability coefficient of the system is , and the resolution is 18.7 V/m, which can meet the measurement requirements. The actual environment was measured by using the optimized device in this paper. The measurement results show that the measurement system can measure the atmospheric electric field and provide reliable measurement data for lightning monitoring and early warning.
- (4)
- By comparing the sensors studied in references [3,4,10], the sensors and their signal processing circuits studied in this paper are smaller in size and lighter in weight, and are more suitable for the aerial electric field measurement in the airborne mode of unmanned aerial vehicles. The parameters such as the resolution and sensitivity of the device studied in this paper are slightly due to those in references [3,4,10], etc. However, the device designed in this paper has more modules and a more complex power supply system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FFT | fast Fourier transform |
| BP | back propagation neural network |
| DC | direct current |
| HHT | Hilbert–Huang transform |
| Ap-FFT | all-phase fast Fourier transform |
| OPA | operational amplifier |
| A/D | analog to digital |
Appendix A
References
- Yu, H.; Zhang, T.-L.; Chen, Y.; Lü, W.-T.; Zhao, X.-P.; Chen, J. Vertical electrical field during decay stage of local thunderstorm near coastline in tropical island. Acta Phys. Sin. 2021, 70, 367–376. [Google Scholar] [CrossRef]
- Zhao, W.; Li, Z.; Zhang, H. Exploring a Directional Measurement Method of Three-Dimensional Electric Field Intensity in the Atmosphere. Electronics 2022, 11, 2688–2700. [Google Scholar] [CrossRef]
- Harrison, R.; Marlton, G. Fair Weather Electric Field Meter for Atmospheric Science Platforms. J. Electrost. 2020, 107, 103489. [Google Scholar] [CrossRef]
- Wang, G.; Kim, W.; Kil, G.; Park, D.; Kim, S. An Intelligent Lightning Warning System Based on Electromagnetic Field and Neural Network. Energies 2019, 12, 1275–1290. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, W.; He, J. Impact factors in calibration and application of field mill for measurement of DC electric field with space charges. CSEE Power Energy Syst. 2015, 1, 31–36. [Google Scholar] [CrossRef]
- Liu, F.; Chun, S.; Chen, R.; Xu, C.; Cao, X. A Low-Noise Amplifier for Submarine Electric Field Signal Based on Chopping Amplification Technology. Sensors 2024, 24, 1417. [Google Scholar] [CrossRef]
- Cui, Y.; Yuan, H.; Song, X.; Zhao, L.; Liu, Y.; Lin, L. Model, design, and testing of field mill sensors for measuring electric fields under high-voltage direct-current power lines. IEEE Trans. Ind. Electron. 2017, 65, 608–615. [Google Scholar] [CrossRef]
- Cui, Y.; Yuan, H.; Zhao, L. Optimum design of calibration device for field mill type electric field sensor based on finite element method. J. Beijing Univ. Aeronaut. Astronaut. 2015, 41, 1807–1812. [Google Scholar]
- Zheng, F.; Xia, S.; Chen, X. Simulation Optimization and Performance Test of Three-Dimensional Electric Field Sensor. Chin. J. Sens. Actuators 2008, 6, 946–950. [Google Scholar]
- Zoi, A.; Thomas, N.; Stylianos, S. Analog Sensor Interface for Field Mill Sensors in Atmospheric Applications. Sensors 2022, 22, 8405–8426. [Google Scholar] [CrossRef]
- Dou, R.; Jing, E.; Chen, X. Design of Weak Signal Amplifier Based on AD620. Instrum. Tech. Sens. 2019, 3, 45–47. [Google Scholar]
- Cheng, J.; Meng, X.; Sun, Y. Design of Signal Amplification Circuit for Logging Tool Weak Voltage Signal Under High Temperature of 200 °C. Instrum. Tech. Sens. 2012, 2, 40–42. [Google Scholar]
- Chang, H.; Zhang, P. Temperature Drift Compensation Method of Liquid Mass Flow Meter. Instrum. Tech. Sens. 2014, 9, 28–29. [Google Scholar]
- Hua, M.; Chen, J. A high precision approach for harmonic and inter harmonic analysis based on six-spectrum-line interpolation FFT. Power Syst. Prot. Control 2019, 47, 9–15. [Google Scholar]
- Wu, J.; Zhang, X.; Liu, B. Harmonic detection method in power system based on empirical wavelet transform. Power Syst. Prot. Control 2020, 48, 136–143. [Google Scholar]
- Tong, T.; Zhang, X.; Liu, B. Analysis of harmonic and inter-harmonic detection based on Fourier-based synchro squeezing transform and Hilbert transform. Power Syst. Technol. 2019, 43, 4200–4208. [Google Scholar]
- Huang, S.; Huang, X.; Huang, B. Harmonic analysis using double-window all-phase FFT based on Blackman window. Proc. CSU-EPSA 2020, 32, 82–88. [Google Scholar]
- Su, T.; Yang, M.; Jin, T. Power harmonic and inter harmonic detection method in renewable power based on Nuttall double-window all-phase FFT algorithm. IET Renew. Power Gener. 2018, 12, 953–961. [Google Scholar] [CrossRef]
- Zhang, H.; Cai, X.; Lu, G. Double-spectrum-line correction method based on double-window all-phase FFT for power harmonic analysis. Chin. J. Sci. Instrum. 2015, 36, 2835–2841. [Google Scholar]
- Xu, H.; Zhang, J.; Pang, S. An electric power harmonic and inter- harmonic detection method based on single spectrumline interpolation of double Hanning windows ap-FFT. Electr. Meas. Instrum. 2017, 54, 87–93. [Google Scholar]
- Zhang, H.; Wang, Y.; Zhang, X. Double adaptive neural network and fast TLS-ESPRIT harmonic detection method and simulation. Electr. Meas. Instrum. 2020, 38, 203–205. [Google Scholar]
- Cao, Y.; Yin, X. Research on power system harmonic detection technology based on BP neural network and all⁃phase fast Fourier transform. Mod. Electron. Tech. 2017, 40, 125–131. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order of Harmonics | Theoretical Amplitude | Traditional FFT-BP | Improved FFT-BP | ||
|---|---|---|---|---|---|
| Measured Amplitude | Error (%) | Measured Amplitude | Error (%) | ||
| 1 | 100 | 99.87 | 0.13 | 100.06 | 0.060 |
| 2 | 90 | 89.92 | 0.09 | 89.993 | 0.080 |
| 3 | 80 | 80.15 | 0.19 | 79.9956 | 0.055 |
| 4 | 70 | 69.78 | 0.31 | 70.042 | 0.060 |
| 5 | 60 | 60.33 | 0.55 | 59.952 | 0.081 |
| 6 | 50 | 49.65 | 0.70 | 50.042 | 0.082 |
| 7 | 40 | 40.36 | 0.90 | 40.035 | 0.087 |
| 8 | 30 | 29.71 | 0.97 | 30.025 | 0.086 |
| 9 | 20 | 20.28 | 1.40 | 19.979 | 0.105 |
| The Order of Harmonics | Traditional FFT-BP | Improved FFT-BP | ||
|---|---|---|---|---|
| Measured Amplitude | Error (%) | Measured Amplitude | Error (%) | |
| 1 | 99.12 | 0.88 | 100.08 | 0.08 |
| 2 | 100.31 | 0.31 | 99.96 | 0.06 |
| 3 | 99.67 | 0.33 | 99.94 | 0.06 |
| 4 | 101.05 | 1.05 | 100.07 | 0.07 |
| 5 | 98.92 | 1.08 | 99.93 | 0.07 |
| 6 | 99.34 | 0.66 | 100.09 | 0.09 |
| 7 | 100.72 | 0.72 | 100.11 | 0.11 |
| 8 | 98.45 | 1.55 | 100.11 | 0.11 |
| 9 | 101.18 | 1.18 | 99.88 | 0.12 |
| Parameter | Reference [3] | Reference [4] | Reference [10] | This Work |
|---|---|---|---|---|
| Number of sector-shaped vanes | 2 | 6 | 2 | 4 |
| Sensor dimensions | 3 cm | N/A | 15.2 cm | 3.2 cm |
| Motor type | N/A | Brushless DC motor | Brushless DC motor | Brushless DC motor |
| Rotation frequency, f (Hz) | 60 | N/A | 12.75 | 60 |
| Electric field range | 150 V/m | 0–80 kV/m | ±20 kV/m | ±20 kV/m |
| Resolution | 16 bits | 30 V/m | 16 bit | 16 bits 18.7 V/m |
| Sensitivity | ~1 mV/(V/m) | 48.75 mV/(kV/m) | 45 mV/(kV/m) | 42.9 mV/(kV/m) |
| Power supply | 6 V | 4 V | 3 V analog front-end supply 5 V motor supply | 3 V analog front-end supply 1.6 V supply for digital circuit 12 V motor supply |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Li, Z.; Zhang, H. Research on the Optimization of the Electrode Structure and Signal Processing Method of the Field Mill Type Electric Field Sensor. Sensors 2025, 25, 4186. https://doi.org/10.3390/s25134186
Zhao W, Li Z, Zhang H. Research on the Optimization of the Electrode Structure and Signal Processing Method of the Field Mill Type Electric Field Sensor. Sensors. 2025; 25(13):4186. https://doi.org/10.3390/s25134186
Chicago/Turabian StyleZhao, Wei, Zhizhong Li, and Haitao Zhang. 2025. "Research on the Optimization of the Electrode Structure and Signal Processing Method of the Field Mill Type Electric Field Sensor" Sensors 25, no. 13: 4186. https://doi.org/10.3390/s25134186
APA StyleZhao, W., Li, Z., & Zhang, H. (2025). Research on the Optimization of the Electrode Structure and Signal Processing Method of the Field Mill Type Electric Field Sensor. Sensors, 25(13), 4186. https://doi.org/10.3390/s25134186