
Review of State Estimation Methods for Autonomous Ground Vehicles: Perspectives on Estimation Objects, Vehicle Characteristics, and Key Algorithms


Abstract
1. Introduction
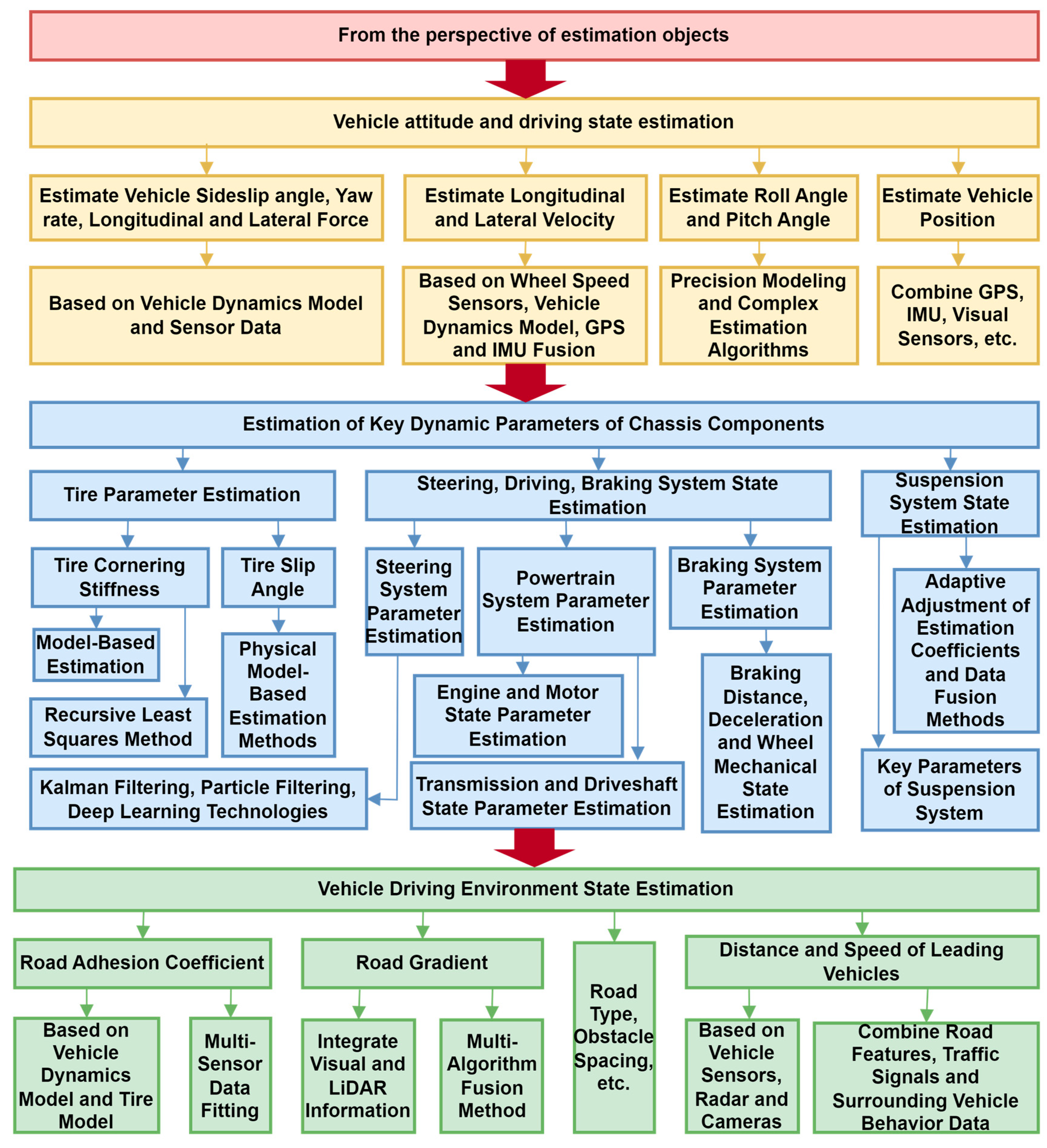
2. Vehicle State Estimation: From the Perspective of Estimation Objects
2.1. Vehicle Attitude and Driving State Estimation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle States | References | Vehicle Relationship of Estimation Objects |
|---|---|---|
| Vehicle sideslip angle | [1,9,12,15,23,24,27,31] | 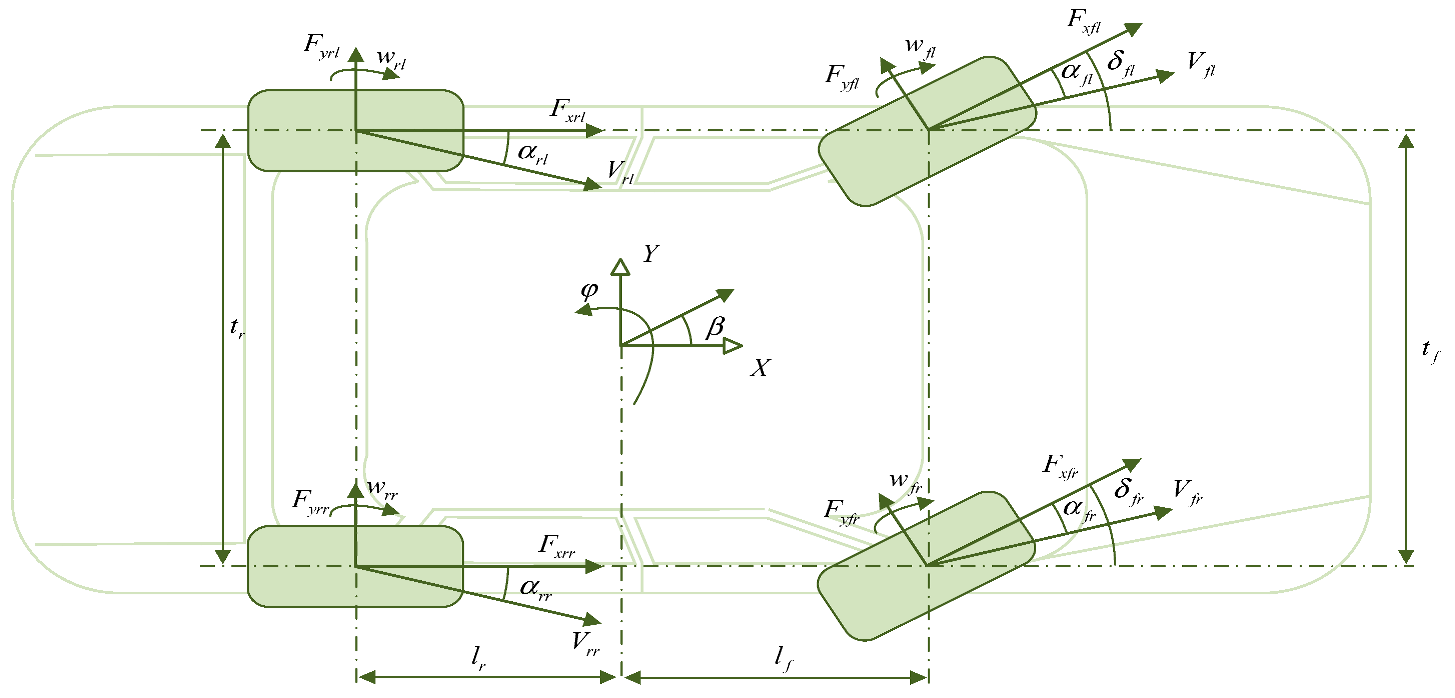 Vehicle state variables including longitudinal, lateral, and yaw degrees of freedom [16]. |
| Vehicle yaw rate | [5,10,14,18,20,22,33] | |
| Longitudinal and lateral tire force | [2,13,16,19,26,30] | |
| Longitudinal and lateral vehicle speed | [3,11,29,32] | |
| Vehicle mass, vehicle roll, and pitch angle | [4,6,7,8,17] | 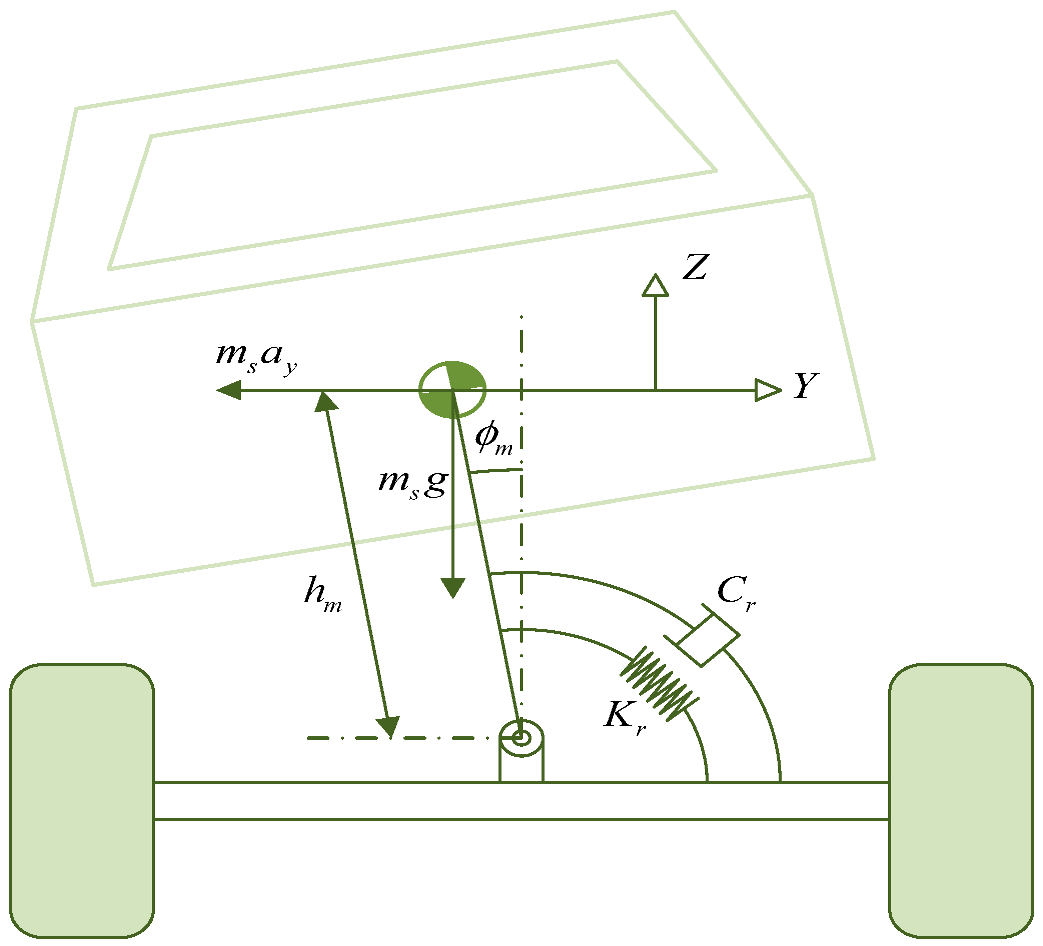 Vehicle state variables including roll dynamics [31]. |
| Vehicle location, road vehicle contact status | [21,25,28] | 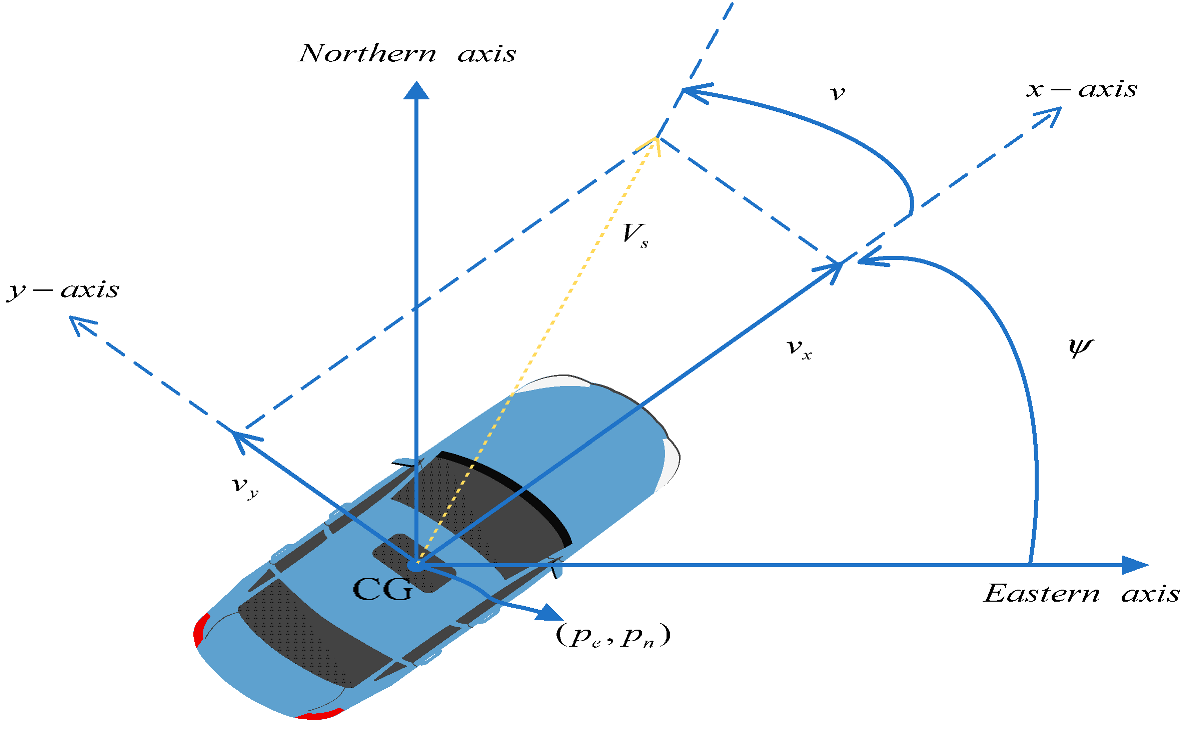 Earth-fixed coordinate system [32]. |
2.2. Estimation of Key Dynamic Parameters of Chassis Components
2.3. Estimation of Vehicle Driving Environment State
3. Vehicle State Estimation: From the Perspective of Vehicle Characteristics
3.1. Vehicle Dynamics Coupling Characteristics
3.2. Redundancy Characteristics of Vehicle Multi-Source Information
3.3. Vehicle State Transition Characteristics
4. Vehicle State Estimation: From the Perspective of Key Algorithms
4.1. Model-Based Kalman Filtering Algorithm
4.2. Data-Driven Machine Learning Algorithm
4.3. Optimization Estimation Algorithm Combining Mechanism-Based Models and Data-Driven Approaches
5. The Main Application Scenarios of Vehicle State Estimation Technology
5.1. Application in Vehicle Autonomous Driving Scenarios
5.2. Application in Vehicle Active Safety Control
5.3. Applications for Vehicle Condition Monitoring and Fault-Tolerant Control
6. The Challenges and Future Trends of Vehicle State Estimation Technology
6.1. Research Challenges
6.1.1. The Fusion Processing Method of Multimodal Data
6.1.2. The Vehicle State Estimation Ability in Complex Environments
6.1.3. The Combination of Vehicle State Estimation Technology and the Trend of Vehicle Electrification and Intelligence
6.2. Future Trends
6.2.1. The Fusion Processing Method of Multimodal Data
6.2.2. Vehicle State Estimation Abilities in Complex Environments
6.2.3. The Combination of Vehicle State Estimation Technology and the Trend of Vehicle Electrification and Intelligence
7. Conclusions
- (1).
- From the perspective of the research object of vehicle state estimation, the current research content includes vehicle attitude, key dynamic parameters of chassis components related to vehicle motion and stability, as well as driving environment parameters in intelligent driving scenarios.
- (2).
- From the perspective of vehicle characteristics, existing research mainly focuses on vehicle dynamics coupling characteristics, vehicle multi-source information redundancy characteristics, and vehicle state transition characteristics.
- (3).
- From the perspective of estimation algorithms, currently there are mainly model-based Kalman filtering algorithms and nonlinear observation algorithms, data-driven-based machine learning algorithms, and fusion estimation algorithms driven by both mechanism models and data.
- (4).
- The main value of state estimation technology is to replace high cost sensors with state estimation techniques or to improve the accuracy of obtaining key parameters and vehicle states using redundant data and optimization algorithms. At present, it has been fully integrated and widely applied in vehicle autonomous driving scenarios, active safety control systems, as well as vehicle status monitoring and fault-tolerant control.
- (5).
- With the development trend of vehicle electrification, intelligence, and networking, the objects and application scenarios of vehicle state estimation are expected to be further expanded, and the dynamic coupling of parameters and multi-source data characteristics will become more complex. At this point, the optimization estimation algorithm under the dual driven concept of model and data will be an important research direction for achieving technological breakthroughs.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yoon, J.H.; Peng, H. Robust vehicle sideslip angle estimation through a disturbance rejection filter that integrates a magnetometer with GPS. IEEE Trans. Intell. Transp. Syst. 2014, 15, 191–204. [Google Scholar] [CrossRef]
- Doumiati, M.; Victorino, A.C.; Charara, A.; Lechner, D. Onboard real-time estimation of vehicle lateral tire-road forces and sideslip angle. IEEE/ASME Trans. Mechatron. 2011, 16, 601–614. [Google Scholar] [CrossRef]
- Guo, H.Y.; Chen, H.; Cao, D.P.; Jin, W.W. Design of a reduced-order non-linear observer for vehicle velocities estimation. IET Control Theory Appl. 2013, 7, 2056–2068. [Google Scholar] [CrossRef]
- Jensen, K.M.; Santos, I.F.; Clemmensen, L.K.H.; Theodorsen, S.; Corstens, H.J.P. Mass estimation of ground vehicles based on longitudinal dynamics using IMU and CAN-bus data. Mech. Syst. Signal Process. 2022, 162, 107982. [Google Scholar] [CrossRef]
- Sun, Q.; Wang, Y.; Cai, Y.; Wong, P.K.; Chen, L.; Bei, S. Nonsingular terminal sliding mode-based direct yaw moment control for four-wheel independently actuated autonomous vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 2568–2582. [Google Scholar] [CrossRef]
- Jensen, K.M.; Santos, I.F.; Clemmensen, L.K.H.; Theodorsen, S.; Corstens, H.J.P. Mass estimation of ground vehicles based on longitudinal dynamics using loosely coupled integrate navigation system and CAN-bus data with model parameter estimation. Mech. Syst. Signal Process. 2022, 171, 108925. [Google Scholar] [CrossRef]
- Oei, M.; Sawodny, O. Quaternion attitude and disturbance observer mass estimation with low-cost sensors for industrial vehicles with trailers. Mechatronics 2023, 93, 102991. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Zhang, H. Sensor Fusion Based on a Dual Kalman Filter for Estimation of Road Irregularities and Vehicle Mass Under Static and Dynamic Conditions. IEEE/ASME Trans. Mechatron. 2019, 24, 1075–1086. [Google Scholar] [CrossRef]
- Zhang, B.J.; Du, H.P.; Lam, J.; Zhang, N.; Li, W.H. A novel observer design for simultaneous estimation of vehicle steering angle and sideslip angle. IEEE Trans. Ind. Electron. 2016, 63, 4357–4365. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Z.; Zhang, L. Unbiased-estimation-based and computation-efficient adaptive MPC for four-wheel-independently-actuated electric vehicles. Mech. Mach. Theory 2020, 154, 104100. [Google Scholar] [CrossRef]
- Hashemia, E.; Khosravani, S.; Khajepour, A.; Kasaiezadeh, A.; Chen, S.K.; Litkouhi, B. Longitudinal vehicle state estimation using nonlinear and parameter-varying observers. Mechatronics 2017, 43, 28–39. [Google Scholar] [CrossRef]
- Gadola, M.; Chindamo, D.; Romano, M.; Padula, F. Development and validation of a Kalman filter-based model for vehicle slip angle estimation. Veh. Syst. Dyn. 2014, 52, 68–84. [Google Scholar] [CrossRef]
- Jin, X.J.; Yin, G.D. Estimation of lateral tire-road forces and sideslip angle for electric vehicles using interacting multiple model filter approach. J. Frankl. Inst. 2015, 352, 686–707. [Google Scholar] [CrossRef]
- Katriniok, A.; Abel, D. Adaptive EKF-based vehicle state estimation with online assessment of local observability. IEEE Trans. Control Syst. Technol. 2016, 24, 1368–1381. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, X.Y.; Wang, J.M.; Karimi, H.R. Robust energy-to-peak sideslip angle estimation with applications to ground vehicles. Mechatronics 2015, 30, 338–347. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X.; Jiang, H.; Sun, X. Design of vehicle running states-fused estimation strategy using Kalman filters and tire force compensation method. IEEE Access 2019, 7, 87273–87287. [Google Scholar] [CrossRef]
- Yang, X.; Wu, C.; He, Y.; Lu, X.Y.; Chen, T. A dynamic rollover prediction index of heavy-duty vehicles with a real-time parameter estimation algorithm using NLMS method. IEEE Trans. Veh. Technol. 2022, 71, 2734–2748. [Google Scholar] [CrossRef]
- He, S.; Xu, X.; Xie, J.; Wang, F.; Liu, Z. Adaptive control of dual-motor autonomous steering system for intelligent vehicles via Bi-LSTM and fuzzy methods. Control Eng. Pract. 2023, 130, 105362. [Google Scholar] [CrossRef]
- Coiret, A.; Fontaine, M.; Cesbron, J.; Betaille, D. Wheel load estimation for autonomous vehicle by using a fiber optical sensor. Transp. Res. Procedia 2023, 69, 131–138. [Google Scholar] [CrossRef]
- Sanchez, A.H.; Poznyak, A.; Chairez, I. Extremum seeking control for the trajectory tracking of a skid steering vehicle via averaged sub-gradient integral sliding-mode theory. Robot. Auton. Syst. 2024, 174, 104609. [Google Scholar] [CrossRef]
- Park, G. Optimal vehicle position estimation using adaptive unscented Kalman filter based on sensor fusion. Mechatronics 2024, 99, 103144. [Google Scholar] [CrossRef]
- He, S.; Xu, X.; Xie, J.; Wang, F.; Liu, Z.; Zhao, F. Fault detection and fault-tolerant control of autonomous steering system for intelligent vehicles combining Bi-LSTM and SPRT. Measurement 2023, 212, 112708. [Google Scholar] [CrossRef]
- Chen, L.; Chen, T.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Sideslip angle estimation of in-wheel motor drive electric vehicles by cascaded multi-Kalman filters and modified tire model. Metrol. Meas. Syst. 2019, 26, 185–208. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W.; Zhang, Y. Side-slip angle estimation based lateral dynamics control for omni-directional vehicles with optimal steering angle and traction/brake torque distribution. Mechatronics 2015, 30, 348–362. [Google Scholar] [CrossRef]
- Sharma, A.K.; Bouteldja, M.; Cerezo, V. Vehicle dynamic state observation and rolling resistance estimation via unknown input adaptive high gain observer. Mechatronics 2021, 79, 102658. [Google Scholar] [CrossRef]
- Woongsun, J.; Ankush, C.; Ali, Z.; Rajesh, R. Simultaneous state estimation and tire model learning for autonomous vehicle applications. IEEE-ASME Trans. Mech. 2021, 26, 1941–1950. [Google Scholar]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Estimation of longitudinal force and sideslip angle for intelligent four-wheel independent drive electric vehicles by observer iteration and information fusion. Sensors 2018, 18, 1268. [Google Scholar] [CrossRef]
- Yoon, J.H.; Li, S.E.; Ahn, C. Estimation of vehicle sideslip angle and tire-road friction coefficient based on magnetometer with GPS. Int. J. Automot. Technol. 2016, 17, 427–435. [Google Scholar] [CrossRef]
- Sun, F.; Huang, X.; Rudolph, J.; Lolenko, K. Vehicle state estimation for anti-lock control with nonlinear observer. Control Eng. Pract. 2015, 43, 69–84. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, Y.; Xie, W.; Zhao, Q.; Lin, F. Hierarchical estimation of vehicle state and tire forces for distributed in-wheel motor drive electric vehicle without previously established tire model. J. Frankl. Inst. 2022, 359, 7051–7068. [Google Scholar] [CrossRef]
- Breschi, V.; Formentin, S.; Rallo, G.; Corno, M.; Savaresi, S.M. Vehicle sideslip estimation via kernel-based LPV identification: Theory and experiments. Automatica 2020, 122, 109237. [Google Scholar] [CrossRef]
- Guo, H.Y.; Chen, H.; Xu, F.; Wang, F.; Lu, G.L. Implementation of EKF for vehicle velocities estimation on FPGA. IEEE Trans. Ind. Electron. 2013, 60, 3823–3835. [Google Scholar] [CrossRef]
- Rafatnia, S.; Mirzaei, M. Estimation of reliable vehicle dynamic model using IMU/GNSS data fusion for stability controller design. Mech. Syst. Signal Process. 2022, 168, 108593. [Google Scholar] [CrossRef]
- Li, J.; Wu, Z.; Li, M.; Shang, Z. Dynamic measurement method for steering wheel angle of autonomous agricultural vehicles. Agriculture 2024, 14, 1602. [Google Scholar] [CrossRef]
- Liu, H.; Yan, S.C.; Shen, Y.; Li, C.H.; Zhang, Y.F.; Hussain, F. Model predictive control system based on direct yaw moment control for 4WID self-steering agriculture vehicle. Int. J. Agric. Biol. Eng. 2021, 14, 175–181. [Google Scholar] [CrossRef]
- Lu, E.; Xue, J.; Chen, T.; Jiang, S. Robust trajectory tracking control of an autonomous tractor-trailer considering model parameter uncertainties and disturbances. Agriculture 2023, 13, 869. [Google Scholar] [CrossRef]
- Oh, J.; Choi, S.B. Vehicle roll and pitch angle estimation using a cost-effective six-dimensional inertial measurement unit. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2013, 227, 577–590. [Google Scholar] [CrossRef]
- Rajamani, R.; Piyabongkarn, D.; Tsourapas, V.; Lew, J. Parameter and state estimation in vehicle roll dynamics. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1558–1567. [Google Scholar] [CrossRef]
- Li, Z.; Guo, Y.; Wang, J. Joint estimation of position and attitude for intelligent vehicles by fusing delayed visual measurements. J. Frankl. Inst. 2023, 360, 6585–6608. [Google Scholar] [CrossRef]
- Ritter, A.; Widmer, F.; Vetterli, B.; Onder, C.H. Optimization-based online estimation of vehicle mass and road grade: Theoretical analysis and experimental validation. Mechatronics 2021, 80, 102663. [Google Scholar] [CrossRef]
- Jeong, D.; Ko, G.; Choi, S.B. Estimation of sideslip angle and cornering stiffness of an articulated vehicle using a constrained lateral dynamics model. Mechatronics 2022, 85, 102810. [Google Scholar] [CrossRef]
- Hashemia, E.; Pirani, M.; Khajepour, A.; Kasaiezadeh, A.; Chen, S.K.; Litkouhi, B. Corner-based estimation of tire forces and vehicle velocities robust to road conditions. Control Eng. Pract. 2017, 61, 28–40. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, X.; Wang, L.; Lu, G.; Jia, Y.; Qiu, Y.; Li, M. Edge-computing based soft sensors with local finite impulse response models for vehicle wheel center loads estimation under multiple working conditions. Control Eng. Pract. 2023, 133, 105447. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Wu, H. An estimation scheme of road friction coefficient based on novel tyre model and improved SCKF. Veh. Syst. Dyn. 2021, 60, 2775–2804. [Google Scholar] [CrossRef]
- Chen, T.; Xu, X.; Chen, L.; Jiang, H.; Cai, Y. Estimation of longitudinal force, lateral vehicle speed and yaw rate for four-wheel independent driven electric vehicles. Mech. Syst. Signal Process. 2018, 101, 377–388. [Google Scholar] [CrossRef]
- Zhao, J.; Li, R.; Zheng, X.; Li, W.; Hu, C.; Liang, Z. Constrained fractional-order model predictive control for robust path following of FWID-AGVs with asymptotic prescribed performance. IEEE Trans. Veh. Technol. 2025, 74, 2692–2705. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Passive fault-tolerant path following control of autonomous distributed drive electric vehicle considering steering system fault. Mech. Syst. Signal Process. 2019, 123, 298–315. [Google Scholar] [CrossRef]
- Hu, J.; Pan, J.; Dai, B.; Chai, X.; Sun, Y.; Xu, L. Development of an attitude adjustment crawler chassis for combine harvester and experiment of adaptive leveling system. Agronomy 2022, 12, 717. [Google Scholar] [CrossRef]
- Zhao, L.; Zhao, X.; Li, H. Rack force fault tolerance estimation of steer-by-wire system under different resolver faults based on sensor flows. Control Eng. Pract. 2024, 147, 105941. [Google Scholar] [CrossRef]
- Zhang, Q.; Hou, J.; Hu, X.; Yuan, L.; Jankowski, Ł.; An, X.; Duan, Z. Vehicle parameter identification and road roughness estimation using vehicle responses measured in field tests. Measurement 2022, 199, 111348. [Google Scholar] [CrossRef]
- Han, L.; Wang, D.; Liu, Y. Bridging chance-constrained and stochastic optimization for risk estimation of virtual energy hubs dominated by hybrid vehicles under diverse uncertainties: To improve economic sustainability. Sustain. Cities Soc. 2024, 111, 105542. [Google Scholar] [CrossRef]
- Kim, S.; Lee, H.; Kim, J.; Park, G. Online adaptive identification of clutch torque transmissibility for the drivability consistency of high-performance production vehicles. Control Eng. Pract. 2024, 147, 1059260. [Google Scholar] [CrossRef]
- Park, J.; Choi, S.; Oh, J.; Eo, J. Adaptive slip engagement control of a wet clutch in vehicle powertrain based on transmitted torque estimation. Mech. Syst. Signal Process. 2022, 171, 108861. [Google Scholar] [CrossRef]
- Jensen, K.M.; Santos, I.F.; Corstens, H.J.P. Estimation of brake pad wear and remaining useful life from fused sensor system, statistical data processing, and passenger car longitudinal dynamics. Wear 2024, 538–539, 205220. [Google Scholar] [CrossRef]
- Wei, L.; Wang, X.; Liu, H.; Li, L. System modeling, experimental validation and pressure estimation of the pneumatic braking system. Mech. Syst. Signal Process. 2023, 187, 109938. [Google Scholar] [CrossRef]
- Yiğit, H.; Köylü, H.; Eken, S. Estimation of road surface type from brake pressure pulses of ABS. Expert Syst. Appl. 2023, 212, 118726. [Google Scholar] [CrossRef]
- Mirzaeinejad, H.; Mirzaei, M.; Rafatnia, S. A novel technique for optimal integration of active steering and differential braking with estimation to improve vehicle directional stability. ISA Trans. 2018, 80, 513–527. [Google Scholar] [CrossRef]
- Han, W.; Xiong, L.; Yu, Z. Braking pressure control in electro-hydraulic brake system based on pressure estimation with nonlinearities and uncertainties. Mech. Syst. Signal Process. 2019, 131, 703–727. [Google Scholar] [CrossRef]
- Sisi, Z.A.; Mirzaei, M.; Rafatnia, S. Estimation of vehicle suspension dynamics with data fusion for correcting measurement errors. Measurement 2024, 231, 114438. [Google Scholar] [CrossRef]
- Thiyagarajan, J.; Sathishkumar, P.; Muthuramalingam, T. Experimental investigation of active suspension force control of electric motor driven actuator with estimation and tracking control strategy. Mater. Today Proc. 2023, 90, 279–286. [Google Scholar] [CrossRef]
- Liu, W.; Wang, R.; Ding, R.; Meng, X.; Yang, L. On-line estimation of road profile in semi-active suspension based on unsprung mass acceleration. Mech. Syst. Signal Process. 2020, 135, 106370. [Google Scholar] [CrossRef]
- Duan, M.; Jia, J.; Ito, T. Fast terminal sliding mode control based on speed and disturbance estimation for an active suspension gravity compensation system. Mech. Mach. Theory 2021, 155, 104073. [Google Scholar] [CrossRef]
- Cui, L.F.; Mao, H.P.; Xue, X.Y.; Ding, S.M.; Qiao, B.Y. Optimized design and test for a pendulum suspension of the crop spray boom in dynamic conditions based on a six DOF motion simulator. Int. J. Agric. Biol. Eng. 2018, 11, 76–85. [Google Scholar]
- Cui, L.F.; Xue, X.Y.; Le, F.X.; Mao, H.P.; Ding, S.M. Design and experiment of electro hydraulic active suspension for controlling the rolling motion of spray boom. Int. J. Agric. Biol. Eng. 2019, 12, 72–81. [Google Scholar] [CrossRef]
- Mustafa, G.I.Y.; Wang, H.P.; Tian, Y. Vibration control of an active vehicle suspension systems using optimized model-free fuzzy logic controller based on time delay estimation. Adv. Eng. Softw. 2019, 127, 141–149. [Google Scholar] [CrossRef]
- Risaliti, E.; Tamarozzi, T.; Vermaut, M.; Cornelis, B.; Desmet, W. Multibody model based estimation of multiple loads and strain field on a vehicle suspension system. Mech. Syst. Signal Process. 2019, 123, 1–25. [Google Scholar] [CrossRef]
- Luo, Y.S.; Wei, L.L.; Xu, L.Z.; Zhang, Q.; Liu, J.Y.; Cai, Q.B.; Zhang, W.B. Stereo-vision-based multi-crop harvesting edge detection for precise automatic steering of combine harvester. Biosyst. Eng. 2022, 215, 115–128. [Google Scholar] [CrossRef]
- Bersani, M.; Mentasti, S.E.; Dahal, P.; Arrigoni, S.; Vignati, M.; Cheli, F.; Matteucci, M. An integrated algorithm for ego-vehicle and obstacles state estimation for autonomous driving. Robot. Auton. Syst. 2021, 139, 103662. [Google Scholar] [CrossRef]
- Zhang, Y.; Jia, R.; Yang, R.; Sun, H. DSNet: A vehicle density estimation network based on multi-scale sensing of vehicle density in video images. Expert Syst. Appl. 2023, 234, 121020. [Google Scholar] [CrossRef]
- Dahal, P.; Mentasti, S.; Paparusso, L.; Arrigoni, S.; Braghin, F. RobustStateNet: Robust ego vehicle state estimation for Autonomous Driving. Robot. Auton. Syst. 2024, 172, 104585. [Google Scholar] [CrossRef]
- Tian, K.; Tzigieras, A.; Wei, C.; Lee, Y.M.; Holmes, C.; Leonetti, M.; Merat, N.; Romano, R.; Markkula, G. Deceleration parameters as implicit communication signals for pedestrians’ crossing decisions and estimations of automated vehicle behaviour. Accid. Anal. Prev. 2023, 190, 107173. [Google Scholar] [CrossRef]
- Débarbouillé, A.; Renaud, F.; Dimitrijevic, Z.; Chojnacki, D.; Rota, L.; Dion, J.-L. Wheel forces estimation with an augmented and constrained extended Kalman filter applied on a nonlinear multi-body model of a half vehicle. Procedia Struct. Integr. 2022, 38, 342–351. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, M.; Cai, B.; Qu, Y.; Hu, J. One estimation method of road slope and vehicle distance. Measurement 2023, 208, 112481. [Google Scholar]
- Gao, L.; Wu, Q.; He, Y. Road slope estimation for heavy-duty vehicles under the influence of multiple source factors in real complex road environments. Mech. Syst. Signal Process. 2024, 208, 110973. [Google Scholar] [CrossRef]
- Wang, B.; Du, X.X.; Wang, Y.N.; Mao, H.P. Multi-machine collaboration realization conditions and preciseand efficient production mode of intelligent agricultural machinery. Int. J. Agric. Biol. Eng. 2024, 17, 27–36. [Google Scholar]
- Fan, P.; Song, G.; Zhu, Z.; Wu, Y.; Zhai, Z.; Yu, L. Road grade estimation based on large-scale fuel consumption data of connected vehicles. Transp. Res. Part D Transp. Environ. 2022, 106, 103262. [Google Scholar] [CrossRef]
- Song, R.; Fang, Y. Vehicle state estimation for INS/GPS aided by sensors fusion and SCKF-based algorithm. Mech. Syst. Signal Process. 2021, 150, 107315. [Google Scholar] [CrossRef]
- Chen, Y.X.; Chen, L.; Wang, R.C.; Xu, X.; Shen, Y.J.; Liu, Y.L. Modeling and test on height adjustment system of electrically-controlled air suspension for agricultural vehicles. Int. J. Agric. Biol. Eng. 2016, 9, 40–47. [Google Scholar]
- Marashian, A.; Razminia, A.; Shiryaev, V.I.; Ossareh, H.R. Longitudinal model identification of multi-gear vehicles using an LPV approach. Math. Comput. Simul. 2024, 216, 1–14. [Google Scholar] [CrossRef]
- Liu, Y.; Wei, L.; Fan, Z.; Wang, X.; Li, L. Road slope estimation based on acceleration adaptive interactive multiple model algorithm for commercial vehicles. Mech. Syst. Signal Process. 2023, 184, 109733. [Google Scholar] [CrossRef]
- Henning, K.U.; Speidel, S.; Gottmann, F.; Sawodny, O. Integrated lateral dynamics control concept for over-actuated vehicles with state and parameter estimation and experimental validation. Control Eng. Pract. 2021, 107, 104704. [Google Scholar] [CrossRef]
- Chen, Y.X.; Chen, L.; Huang, C.; Lu, Y.; Wang, C. A dynamic tire model based on HPSO-SVM. Int. J. Agric. Biol. Eng. 2019, 12, 36–41. [Google Scholar] [CrossRef]
- Marco, V.R.; Kalkkuhl, J.; Raisch, J.; Scholte, W.J.; Nijmeijer, H.; Seel, T. Multi-modal sensor fusion for highly accurate vehicle motion state estimation. Control Eng. Pract. 2020, 100, 104409. [Google Scholar] [CrossRef]
- Yu, Y.; Hao, S.; Guo, S.; Tang, Z.; Chen, S. Motor Torque Distribution Strategy for Different Tillage Modes of Agricultural Electric Tractors. Agriculture 2022, 12, 1373. [Google Scholar] [CrossRef]
- Li, X.; Song, X.; Chan, C.Y. Reliable vehicle sideslip angle fusion estimation using low-cost sensors. Measurement 2014, 51, 241–258. [Google Scholar] [CrossRef]
- Li, Y.; Xu, L.; Lv, L.; Shi, Y.; Yu, X. Study on Modeling Method of a Multi-Parameter Control System for Threshing and Cleaning Devices in the Grain Combine Harvester. Agriculture 2022, 12, 1483. [Google Scholar] [CrossRef]
- Chen, T.; Xu, L.; Ahn, H.S.; Lu, E.; Liu, Y.; Xu, R. Evaluation of Headland Turning Types of Adjacent Parallel Paths for Combine Harvesters. Biosyst. Eng. 2023, 233, 93–113. [Google Scholar] [CrossRef]
- Zhu, Z.; Chai, X.; Xu, L.; Quan, L.; Yuan, C.; Tian, S. Design and Performance of a Distributed Electric Drive System for a Series Hybrid Electric Combine Harvester. Biosyst. Eng. 2023, 236, 160–174. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, H.; Li, H.; Li, Y.; Ding, Z.; Chen, J. Developments of Crawler Steering Gearbox for Combine Harvester Straight Forward and Steering in Situ. Int. J. Agric. Biol. Eng. 2020, 13, 120–126. [Google Scholar] [CrossRef]
- Yang, S.; Zhai, C.; Gao, Y.; Dou, H.; Zhao, X.; He, Y.; Wang, X. Planting Uniformity Performance of Motor-Driven Maize Precision Seeding Systems. Int. J. Agric. Biol. Eng. 2022, 15, 101–108. [Google Scholar] [CrossRef]
- Oh, J.J.; Choi, S.B. Vehicle velocity observer design using 6-D IMU and multiple-observer approach. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1865–1879. [Google Scholar] [CrossRef]
- Liu, Y.H.; Li, T.; Yang, Y.Y.; Ji, X.W.; Wu, J. Estimation of tire-road friction coefficient based on combined APF-IEKF and iteration algorithm. Mech. Syst. Signal Process. 2017, 88, 25–35. [Google Scholar] [CrossRef]
- Li, J.; Shang, Z.; Li, R.; Cui, B. Adaptive Sliding Mode Path Tracking Control of Unmanned Rice Transplanter. Agriculture 2022, 12, 1225. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Z.; Ding, S.; Xia, J.; Xing, G. Adaptive Disturbance Observer-Based Fixed Time Nonsingular Terminal Sliding Mode Control for Path-Tracking of Unmanned Agricultural Tractors. Biosyst. Eng. 2024, 246, 96–109. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, K.; Ding, R.; Jiang, Y.; Jiang, Y. A Novel Hydraulic Interconnection Design and Sliding Mode Synchronization Control of Leveling System for Crawler Work Machine. Agriculture 2025, 15, 137. [Google Scholar] [CrossRef]
- Tufano, F.; Lui, D.G.; Battistini, S.; Brancati, R.; Lenzo, B.; Santini, S. Vehicle sideslip angle estimation under critical road conditions via nonlinear Kalman filter-based state-dependent interacting multiple model approach. Control Eng. Pract. 2024, 146, 105901. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Vehicle sideslip angle estimation by fusing inertial measurement unit and global navigation satellite system with heading alignment. Mech. Syst. Signal Process. 2021, 150, 107290. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Diaz, V. Vehicle sideslip angle measurement based on sensor data fusion using an integrated ANFIS and an unscented Kalman filter algorithm. Mech. Syst. Signal Process. 2016, 72, 832–845. [Google Scholar] [CrossRef]
- Chen, J.; Ning, X.; Li, Y.; Yang, G.; Wu, P.; Chen, S. A Fuzzy Control Strategy for the Forward Speed of a Combine Harvester Based on KDD. Appl. Eng. Agric. 2017, 33, 15–22. [Google Scholar]
- Flores, G.A.; Tang, Y.; López, E.E. Navigation observer design using vector measurements and a GPS sensor. IEEE Sens. J. 2023, 23, 23448–23455. [Google Scholar] [CrossRef]
- Rafael, A.C.; Alessandro, C.V.; Jose, R.A.; Azinheira, A.V.F.; Ely, C.P.; Samuel, S.B. Estimation of vertical; lateral, and longitudinal tire forces in four-wheel vehicles using a delayed interconnected cascade-observer structure. IEEE-ASME Trans. Mech. 2019, 24, 561–571. [Google Scholar]
- Nam, K.; Oh, S.; Fujimoto, H.; Hori, Y. Estimation of sideslip angle and roll angles of electric vehicles using lateral tire force sensors through RLS and Kalman filter approaches. IEEE Trans. Ind. Electron. 2013, 60, 988–1000. [Google Scholar] [CrossRef]
- Yoon, J.H.; Peng, H. A cost-effective sideslip estimation method using velocity measurements from two GPS receivers. IEEE Trans. Veh. Technol. 2014, 63, 2589–2599. [Google Scholar] [CrossRef]
- Madhusudhanan, A.K.; Corno, M.; Holweg, E. Vehicle sideslip estimator using load sensing bearings. Control Eng. Pract. 2016, 54, 46–57. [Google Scholar] [CrossRef]
- Damrongrit, P.; Rajesh, R.; John, A.G. Development and experimental evaluation of a slip angle estimator for vehicle stability control. IEEE Trans. Control Syst. Technol. 2009, 17, 78–88. [Google Scholar]
- Liu, W.; He, H.W.; Sun, F.C. Vehicle state estimation based on minimum model error criterion combining with extended Kalman filter. J. Frankl. Inst. 2016, 353, 834–856. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.F.; Jiang, H.B.; Sun, X.Q. Sideslip angle fusion estimation method of an autonomous electric vehicle based on robust cubature Kalman filter with redundant measurement information. World Electr. Veh. J. 2019, 10, 34. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Diaz, V. A robust observer based on energy-to-peak filtering in combination with neural networks for parameter varying systems and its application to vehicle roll angle estimation. Mechatronics 2018, 50, 196–204. [Google Scholar] [CrossRef]
- Ding, X.L.; Wang, Z.P.; Zhang, L. Event-triggered vehicle sideslip angle estimation based on low-cost sensors. IEEE Trans. Ind. Informat. 2022, 18, 4466–4476. [Google Scholar] [CrossRef]
- Ding, X.L.; Wang, Z.P.; Zhang, L.; Wang, C. Longitudinal vehicle speed estimation for four-wheel-independently-actuated electric vehicles based on multi-sensor fusion. IEEE Trans. Veh. Technol. 2020, 69, 12797–12806. [Google Scholar] [CrossRef]
- Ma, W.; Yuan, J.; An, K.; Yu, C. Route flow estimation based on the fusion of probe vehicle trajectory and automated vehicle identification data. Transp. Res. Part C Emerg. Technol. 2022, 144, 103907. [Google Scholar] [CrossRef]
- Chen, X.; Li, S.; Li, L.; Zhao, W.; Cheng, S. Longitudinal-lateral-cooperative estimation algorithm for vehicle dynamics states based on adaptive-square-root-cubature-Kalman-filter and similarity-principle. Mech. Syst. Signal Process. 2022, 176, 109162. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X. Sideslip angle fusion estimation method of three-axis autonomous vehicle based on composite model and adaptive cubature Kalman filter. IEEE Trans. Transp. Electrif. 2024, 10, 316–330. [Google Scholar] [CrossRef]
- Welling, O.; Shoop, S.; Letcher, T.; Elder, B.; Bodie, M. Estimation of plowing forces on vehicles driving through deep snow. J. Terramechanics 2022, 104, 25–29. [Google Scholar] [CrossRef]
- Lúa, C.A.; Bianchi, D.; Gennaro, S.D. Nonlinear observer-based adaptive control of ground vehicles with uncertainty estimation. J. Frankl. Inst. 2023, 360, 14175–14189. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Cai, Y.; Xu, X. Robust sideslip angle observer with regional stability constraint for an uncertain singular intelligent vehicle system. IET Control Theory Appl. 2018, 12, 1802–1811. [Google Scholar] [CrossRef]
- Zheng, X.; Cai, R.; Xiao, S.; Qiu, Y.; Zhang, J.; Li, M. Primary–auxiliary model scheduling based estimation of the vertical wheel force in a full vehicle system. Mech. Syst. Signal Process. 2023, 187, 109946. [Google Scholar] [CrossRef]
- Leng, B.; Jin, D.; Xiong, L.; Yang, X.; Yu, Z.P. Estimation of tire-road peak adhesion coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion. Mech. Syst. Signal Process. 2021, 150, 107275. [Google Scholar] [CrossRef]
- Lu, Q.; Gentile, P.; Tota, A.; Sorniotti, A.; Gruber, P.; Costamagna, F.; Smet, J.D. Enhancing vehicle cornering limit through sideslip and yaw rate control. Mech. Syst. Signal Process. 2016, 75, 455–472. [Google Scholar] [CrossRef]
- Bevly, D.M.; Ryu, J.H.; Gerdes, J.C. Integrating INS sensors with GPS measurements for continuous estimation of vehicle sideslip, roll, and tire cornering stiffness. IEEE Trans. Intell. Transport. Syst. 2006, 7, 483–493. [Google Scholar] [CrossRef]
- Li, X.; Chan, C.Y.; Wang, Y. A reliable fusion methodology for simultaneous estimation of vehicle sideslip and yaw angles. IEEE Trans. Veh. Technol 2016, 65, 4440–4458. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Z.P.; Zhang, L.; Cao, D.P.; Dorrell, D.G. A vehicle rollover evaluation system based on enabling state and parameter estimation. IEEE Trans. Ind. Informat. 2021, 17, 4003–4013. [Google Scholar] [CrossRef]
- Cheng, S.; Li, C.; Chen, X.; Li, L.; Wu, X.; Fan, Z. A hierarchical estimation scheme of tire-force based on random-walk SCKF for vehicle dynamics control. J. Frankl. Inst. 2020, 357, 13964–13985. [Google Scholar] [CrossRef]
- Zhu, J.J.; Wang, Z.P.; Zhang, L.; Zhang, W.L. State and parameter estimation based on a modified particle filter for an in-wheel-motor-drive electric vehicle. Mech. Mach. Theory 2019, 133, 606–624. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, Z.; Lou, S.; Lv, C. Interacting multiple model-based ETUKF for efficient state estimation of connected vehicles with V2V communication. Green Energy Intell. Transp. 2023, 2, 100044. [Google Scholar] [CrossRef]
- Freeman, P.; Pandita, R.; Srivastava, N.; Balas, G. Model-based and data-driven fault detection performance for a small UAV. IEEE/ASME Trans. Mechatron. 2013, 18, 1300–1309. [Google Scholar] [CrossRef]
- Liu, H.; Deng, Z.; Che, Y.; Xu, L.; Wang, B.; Wang, Z.; Xie, Y.; Hu, X. Big field data-driven battery pack health estimation for electric vehicles: A deep-fusion transfer learning approach. Mech. Syst. Signal Process. 2024, 218, 111585. [Google Scholar] [CrossRef]
- Fan, P.; Song, G.; Zhai, Z.; Wu, Y.; Yu, L. Fuel consumption estimation in heavy-duty trucks: Integrating vehicle weight into deep-learning frameworks. Transp. Res. Part D Transp. Environ. 2024, 130, 104157. [Google Scholar] [CrossRef]
- Li, Q.; He, H.; Chen, X.; Gao, J. Learning-based vehicle state estimation using Gaussian process regression combined with extended Kalman filter. J. Frankl. Inst. 2024, 361, 106907. [Google Scholar] [CrossRef]
- Melzi, S.; Sabbioni, E. On the vehicle sideslip angle estimation through neural networks: Numerical and experimental results. Mech. Syst. Signal Process. 2011, 25, 2005–2019. [Google Scholar] [CrossRef]
- Matuško, J.; Petroić, I.; Perić, N. Neural network based tire/road friction force estimation. Eng. Appl. Artif. Intell. 2008, 21, 442–456. [Google Scholar] [CrossRef]
- Sasikala, S.; Neelaveni, R.; Jose, P.S. OSTM-NET: Joint scale variation and occlusion handling deep network for real-time vehicle counting and volume estimation. Digit. Signal Process. 2024, 149, 104507. [Google Scholar] [CrossRef]
- Wang, S.; Wang, C.; Aninakwa, P.T.; Jin, S.; Fernandez, C.; Huang, Q. An improved parameter identification and radial basis correction-differential support vector machine strategies for state-of-charge estimation of urban-transportation-electric-vehicle lithium-ion batteries. J. Energy Storage 2024, 80, 110222. [Google Scholar] [CrossRef]
- Wessels, M.; Oberfeld, D. A binary acceleration signal reduces overestimation in pedestrians’ visual time-to-collision estimation for accelerating vehicles. Heliyon 2024, 10, e27483. [Google Scholar] [CrossRef]
- Ma, W.; Liu, Y.; Alimo, P.K.; Wang, L. Vehicle carbon emission estimation for urban traffic based on sparse trajectory data. Int. J. Transp. Sci. Technol. 2024, 16, 222–233. [Google Scholar] [CrossRef]
- Rakhmatulin, V.; Cabrera, M.A.; Puchkov, A.; Burnaev, E.; Tsetserukou, D. Pose estimation in robotic electric vehicle plug-in charging tasks using auto-annotation and deep learning-based keypoint detector. Eng. Appl. Artif. Intell. 2024, 133, 108455. [Google Scholar] [CrossRef]
- Chen, W.; Deng, M.; Liu, P.; Lai, C.; Lin, Y. A framework for real-time vehicle counting and velocity estimation using deep learning. Sustain. Comput. Inform. Syst. 2023, 40, 100927. [Google Scholar] [CrossRef]
- Jiang, Y.; Meng, X. A battery capacity estimation method based on the equivalent circuit model and quantile regression using vehicle real-world operation data. Energy 2023, 284, 129126. [Google Scholar] [CrossRef]
- Corradini, M.L. Data Driven Control and slip estimation for agricultural tracked vehicles. Frankl. Open 2023, 5, 100048. [Google Scholar] [CrossRef]
- Pang, Y.; Li, H.; Tang, P.; Chen, C. Synchronization Optimization of Pipe Diameter and Operation Frequency in a Pressurized Irrigation Network Based on the Genetic Algorithm. Agriculture 2022, 12, 673. [Google Scholar] [CrossRef]
- Sun, L.; Liu, M.; Wang, Z.; Wang, C.; Luo, F. Research on Load Spectrum Reconstruction Method of Exhaust System Mounting Bracket of a Hybrid Tractor Based on MOPSO-Wavelet Decomposition Technique. Agriculture 2023, 13, 1919. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, B.; Pan, S.; Ye, Y.; Wang, E.; Mao, H. Task Allocation of Multi-Machine Collaborative Operation for Agricultural Machinery Based on the Improved Fireworks Algorithm. Agronomy 2024, 14, 710. [Google Scholar] [CrossRef]
- Lu, H.; Wang, P.; Fu, X.; Chen, H.; Hu, Y. A first-order generalized pseudo-Bayesian method based on moving horizon estimation for surrounding vehicle states estimation in complex environments. Measurement 2023, 213, 112678. [Google Scholar] [CrossRef]
- Selvaraj, V.; Vairavasundaram, I. A Bayesian optimized machine learning approach for accurate state of charge estimation of lithiumion batteries used for electric vehicle application. J. Energy Storage 2024, 86, 111321. [Google Scholar] [CrossRef]
- Wu, F.; Cheng, Z.; Chen, H.; Qiu, Z.; Sun, L. Traffic state estimation from vehicle trajectories with anisotropic Gaussian processes. Transp. Res. Part C Emerg. Technol. 2024, 163, 104646. [Google Scholar] [CrossRef]
- Ranpura, P.; Shukla, V.; Gujar, R. Estimation of vehicle control delay using artificial intelligence techniques for heterogeneous traffic conditions. Expert Syst. Appl. 2024, 246, 123206. [Google Scholar] [CrossRef]
- Li, M.; Jia, Y.; Lei, T. Path tracking of varying-velocity 4WS autonomous vehicles under tire force friction ellipse constraints. Robot. Auton. Syst. 2024, 173, 104621. [Google Scholar] [CrossRef]
- Rahimi, M.; Candeo, S.; Lio, M.D.; Biral, F.; Wahlström, J.; Bortoluzzi, D. A novel approach for brake emission estimation based on traffic microsimulation, vehicle system dynamics, and machine learning modeling. Atmos. Pollut. Res. 2023, 14, 101872. [Google Scholar] [CrossRef]
- Deniz, N.; Jorquera, F.; Cheein, F.A. Absolute joint-angle estimation of generalised N-Trailer vehicles equipped with incremental encoders using moving horizon estimation. ISA Trans. 2023, 143, 678–691. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X. Trajectory and Velocity Planning Method of Emergency Rescue Vehicle Based on Segmented Three-Dimensional Quartic Bezier Curve. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3461–3475. [Google Scholar] [CrossRef]
- Pletschen, N.; Diepold, K.J. Nonlinear state estimation for suspension control applications: A Takagi-Sugeno Kalman filtering approach. Control. Eng. Pract. 2017, 61, 292–306. [Google Scholar] [CrossRef]
- Zhu, Z.; Zeng, L.; Chen, L.; Zou, R.; Cai, Y. Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT. Agriculture 2022, 12, 1986. [Google Scholar] [CrossRef]
- He, Y.F.; Zhu, Q.Z.; Fu, W.Q.; Luo, C.H.; Cong, Y.; Qin, W.C.; Meng, Z.J.; Chen, L.P.; Zhao, C.J.; Wu, G.W. Design and experiment of a control system for sweet potato seedling-feeding and planting device based on a pre-treatment seedling belt. J. Agric. Eng. 2022, 53, 1261. [Google Scholar]
- Jin, Y.C.; Liu, J.Z.; Xu, Z.J.; Yuan, S.Q.; Li, P.P.; Wang, J.Z. Development status and trend of agricultural robot technology. Int. J. Agric. Biol. Eng. 2021, 14, 1–19. [Google Scholar] [CrossRef]
- Lu, E.; Ma, Z.; Li, Y.M.; Xu, L.Z.; Tang, Z. Adaptive backstepping control of tracked robot running trajectory based on real-time slip parameter estimation. Int. J. Agric. Biol. Eng. 2020, 13, 178–187. [Google Scholar] [CrossRef]
- Tian, Y.; Sun, J.; Zhou, X.; Wu, X.; Lu, B.; Dai, C. Research on apple origin classification based on variable iterative space shrinkage approach with stepwise regression-support vector machine algorithm and visible-near infrared hyperspectral imaging. J. Food Process Eng. 2020, 43, e13432. [Google Scholar] [CrossRef]
- Xu, G.; Fang, H.; Song, Y.; Du, W. Optimal Design and Analysis of Cavitating Law for Well-Cellar Cavitating Mechanism Based on MBD-DEM Bidirectional Coupling Model. Agriculture 2023, 13, 142. [Google Scholar] [CrossRef]
- Feng, H.; Tao, Y.; Feng, J.; Zhang, Y.; Xue, H.; Wang, T.; Xu, X.; Chen, P. Fault-Tolerant Collaborative Control of Four-Wheel-Drive Electric Vehicle for One or More In-Wheel Motors’ Faults. Sensors 2025, 25, 1540. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X.; Sun, X. Trajectory tracking control of steer-by-wire autonomous ground vehicle considering the complete failure of vehicle steering motor. Simul. Model. Pract. Theory 2021, 109, 102235. [Google Scholar] [CrossRef]
- Chen, T.; Xu, X.; Cai, Y.; Chen, L.; Li, K. QPSOMPC-based chassis coordination control of 6WIDAGV for vehicle stability and trajectory tracking. J. Frankl. Inst. 2025, 362, 107458. [Google Scholar] [CrossRef]
- Tao, Y.; Ge, C.; Feng, H.; Xue, H.; Yao, M.; Tang, H.; Liao, Z.; Chen, P. A novel approach for adaptively separating and extracting compound fault features of the in-wheel motor bearing. ISA Trans. 2025, 159, 337–351. [Google Scholar] [CrossRef]
- May, M.P.; Henning, K.U.; Sawodny, O. Experimental validation of sensor fault estimation for vehicle dynamics with a nonlinear tire model. Control Eng. Pract. 2023, 141, 105725. [Google Scholar] [CrossRef]
- Huang, T.; Pan, H.; Sun, W. A sensor fault detection, isolation, and estimation method for intelligent vehicles. Control Eng. Pract. 2023, 139, 105620. [Google Scholar] [CrossRef]
- Hajjami, L.E.; Mellouli, E.M.; Žuraulis, V.; Berrada, M. A novel robust adaptive neuro-sliding mode steering controller for autonomous ground vehicles. Robot. Auton. Syst. 2023, 170, 104557. [Google Scholar] [CrossRef]



| Perspective | Method | References |
|---|---|---|
| Estimation means | Based on kinematic models | [4,6,11,15,23,24,25,26,30,32,33,50] |
| Based on dynamic models | [1,2,5,8,9,10,13,27,28,29,31,34,35,36,37,38,39,46,55] | |
| Combining kinematic and dynamic models | [12,14,16,17,18,19,20,21,28,40,41,42,43,44,45] | |
| Applied algorithm | Kalman filter and its improved form | [6,8,12,13,40,41,42,43,45,46,47,72,73,74,77,81,85,92,96,97,110,112,113,121,122,123,124,125] |
| Robust estimation algorithm | [1,25,28,29,31,34,36,37,38,39,41,42,79,82,83,108,109,116,117] | |
| Sliding-mode algorithm, least square method, and other nonlinear estimation algorithms | [2,3,4,5,7,17,20,30,33,35,36,43,44,62,67,84,93,94,95,115,118,119,120] |
| Algorithm Category | Method | Disadvantages |
|---|---|---|
| EKF | High computational efficiency; good adaptability to weak nonlinear systems | Large linearization errors in strongly nonlinear systems; limited observability; average robustness to model noise |
| UKF/CKF | Good estimation accuracy and stability; strong adaptability to moderately nonlinear systems | High computational cost; possible divergence or accuracy reduction in high-dimensional state spaces |
| PF | Suitable for strongly nonlinear systems; good noise robustness | Prone to sample degradation in high-dimensional state spaces |
| Deep Learning | Can handle complex sensor data; strong nonlinear mapping capability | High computational cost; complex model training |
| Reinforcement Learning | Can adaptively adjust estimation strategies; suitable for dynamic environments | High requirements for data quality and annotation accuracy |
| Hybrid Optimization Algorithm | Fully utilizes the advantages of both mechanism- and data-driven methods; improves estimation accuracy and robustness | Performance depends on the quality of data preprocessing and algorithm selection |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Chen, T.; Wang, R.; Lu, J.; Dou, G. Review of State Estimation Methods for Autonomous Ground Vehicles: Perspectives on Estimation Objects, Vehicle Characteristics, and Key Algorithms. Sensors 2025, 25, 3927. https://doi.org/10.3390/s25133927
Wang X, Chen T, Wang R, Lu J, Dou G. Review of State Estimation Methods for Autonomous Ground Vehicles: Perspectives on Estimation Objects, Vehicle Characteristics, and Key Algorithms. Sensors. 2025; 25(13):3927. https://doi.org/10.3390/s25133927
Chicago/Turabian StyleWang, Xiaoyu, Te Chen, Renzhong Wang, Jiankang Lu, and Guowei Dou. 2025. "Review of State Estimation Methods for Autonomous Ground Vehicles: Perspectives on Estimation Objects, Vehicle Characteristics, and Key Algorithms" Sensors 25, no. 13: 3927. https://doi.org/10.3390/s25133927
APA StyleWang, X., Chen, T., Wang, R., Lu, J., & Dou, G. (2025). Review of State Estimation Methods for Autonomous Ground Vehicles: Perspectives on Estimation Objects, Vehicle Characteristics, and Key Algorithms. Sensors, 25(13), 3927. https://doi.org/10.3390/s25133927