



An Enhanced Adaptive Kalman Filter for Multibody Model Observation




Abstract
1. Introduction
2. Materials and Methods
2.1. Multibody Formulation
2.2. State and Input Observer
2.3. Noise Modeling
3. Results and Discussion
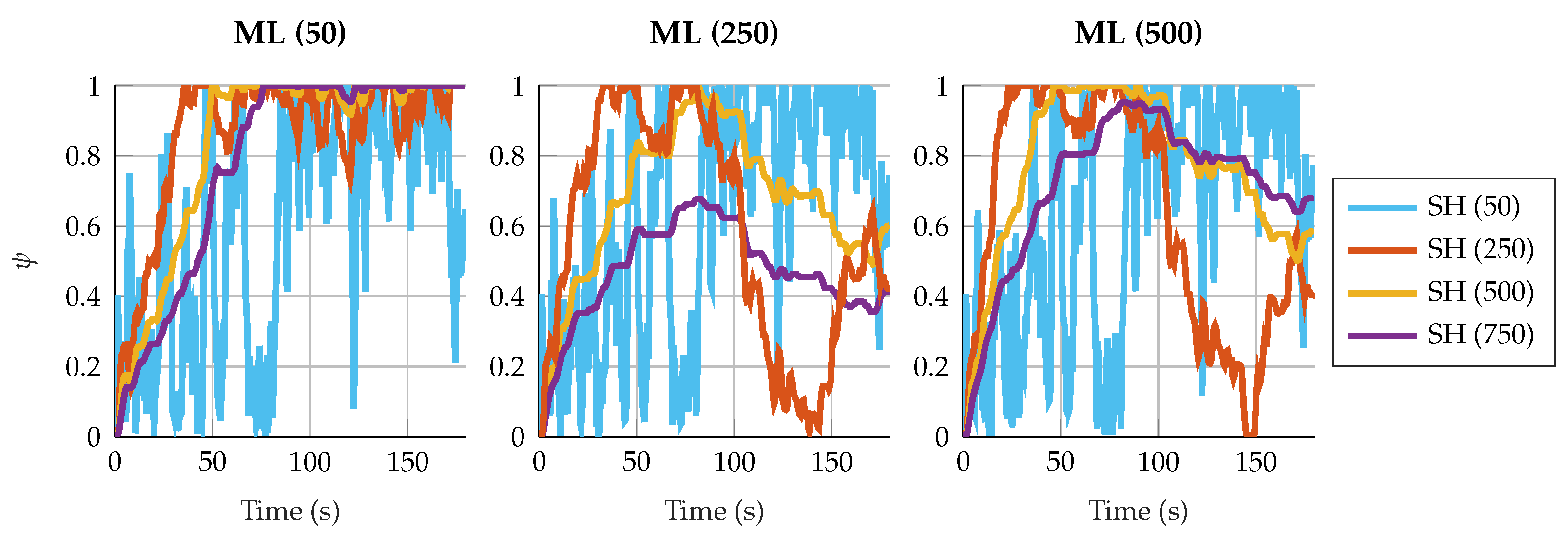
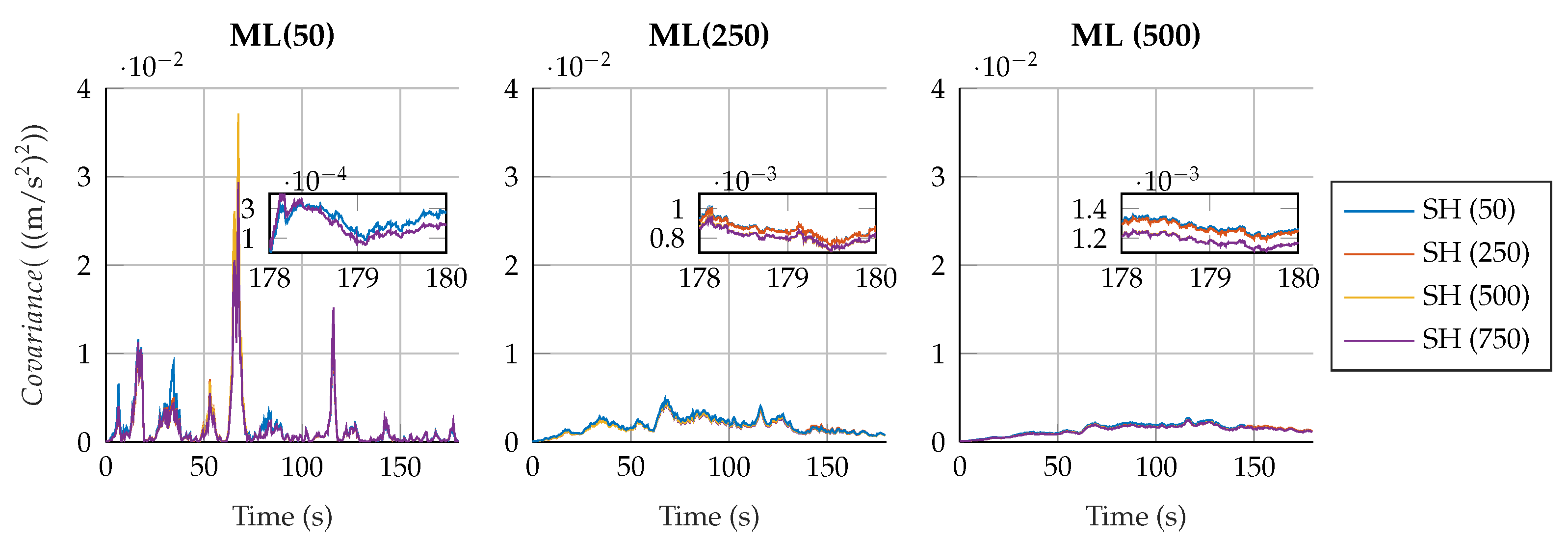
3.1. Window Size Selection
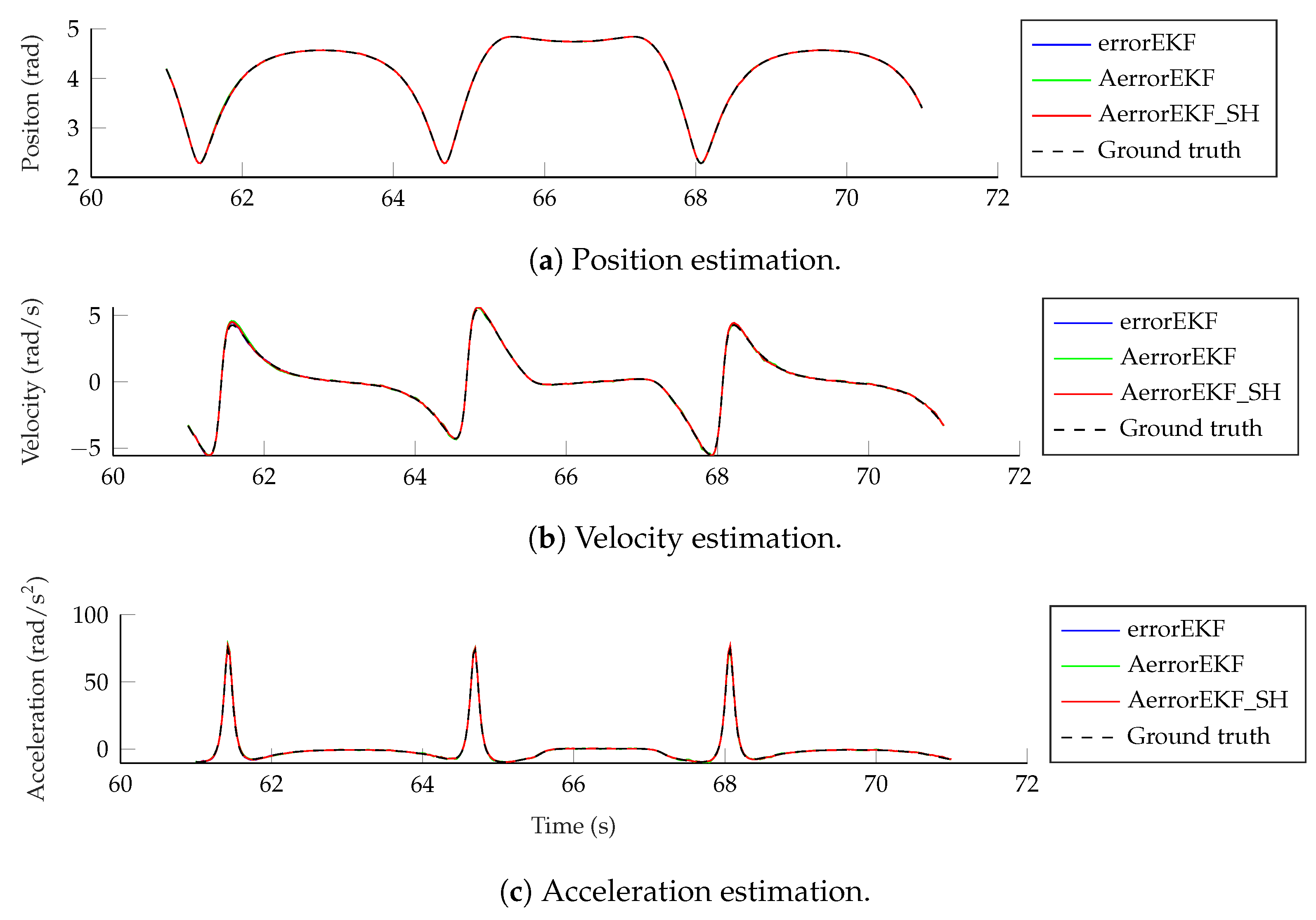
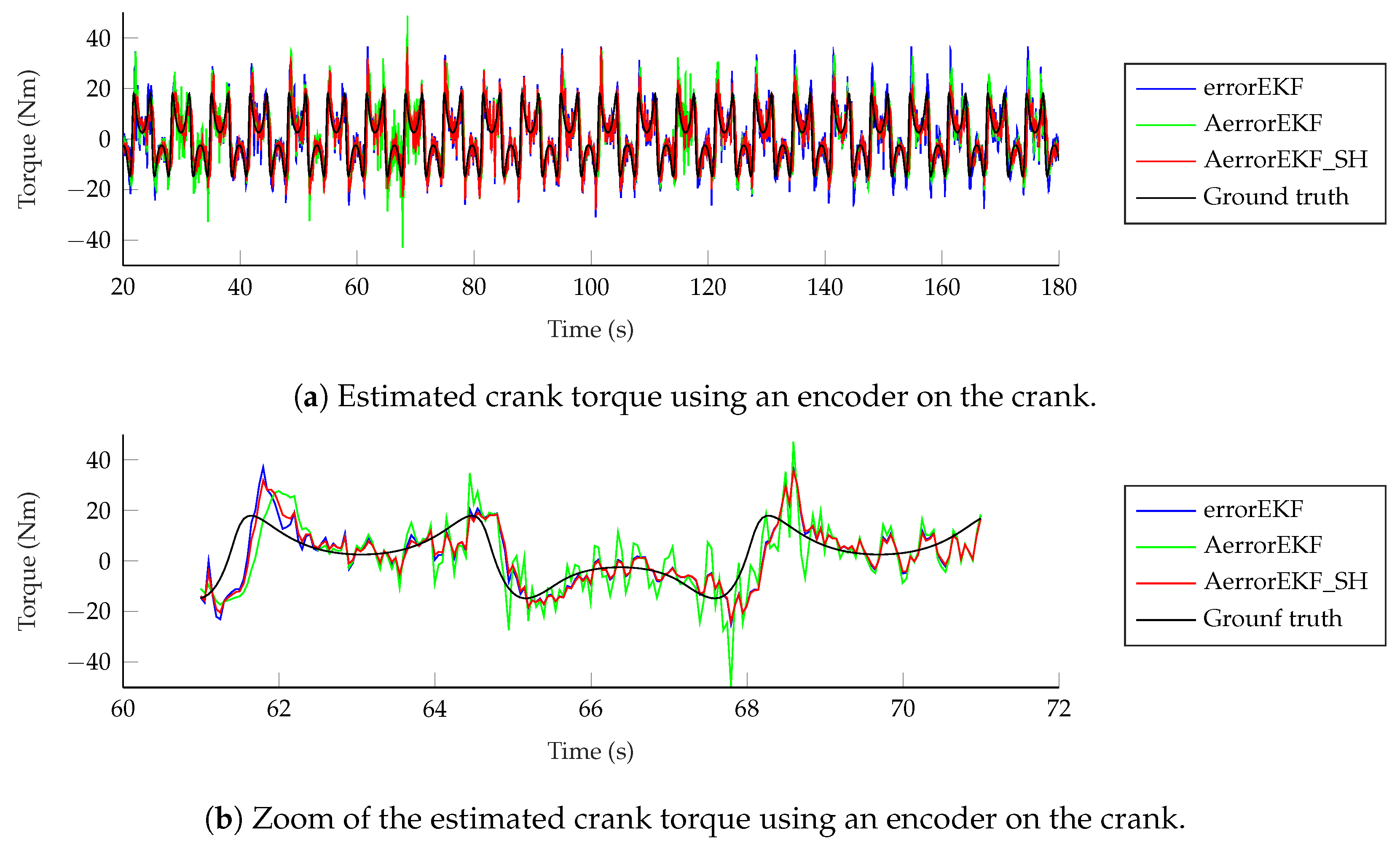
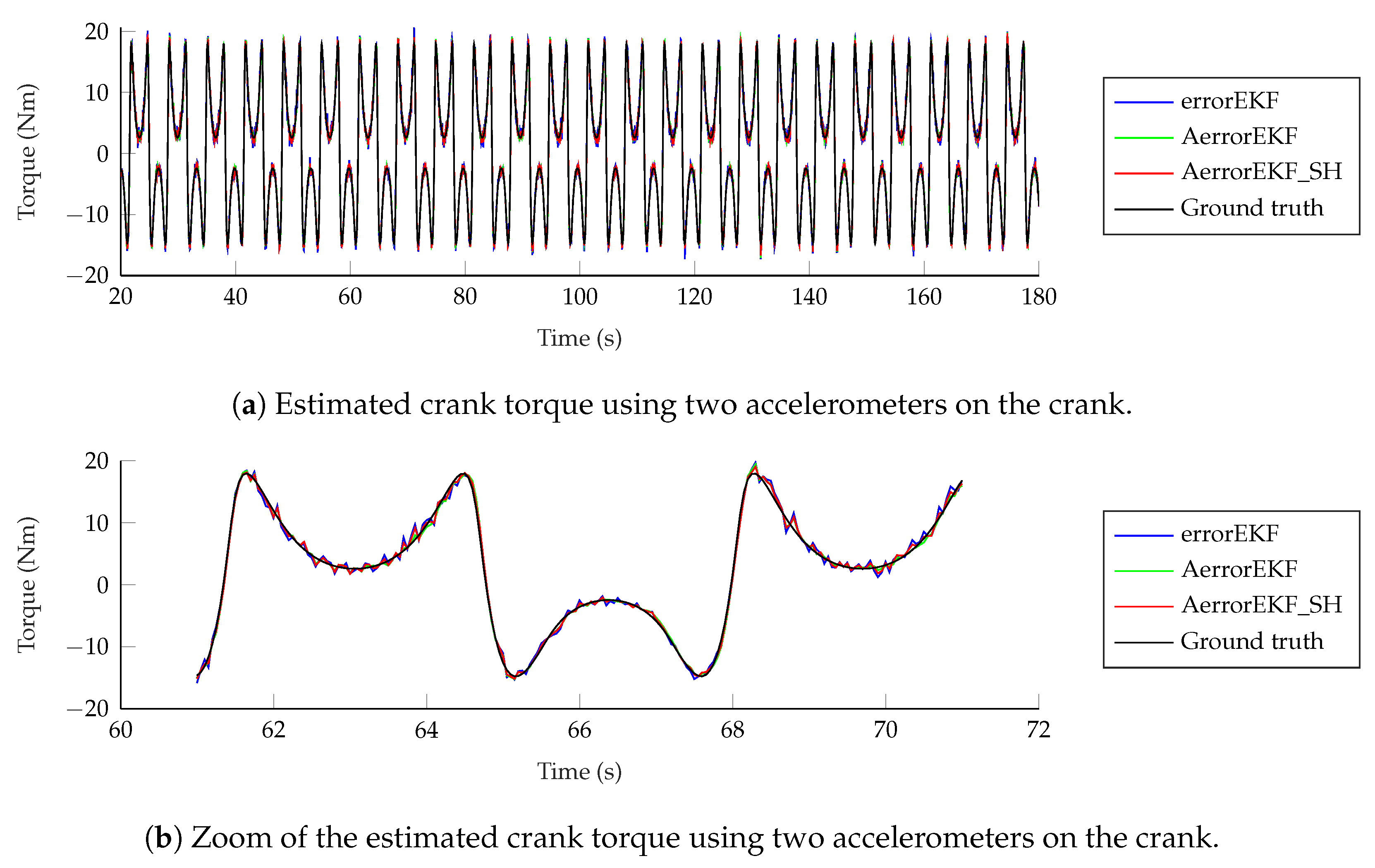
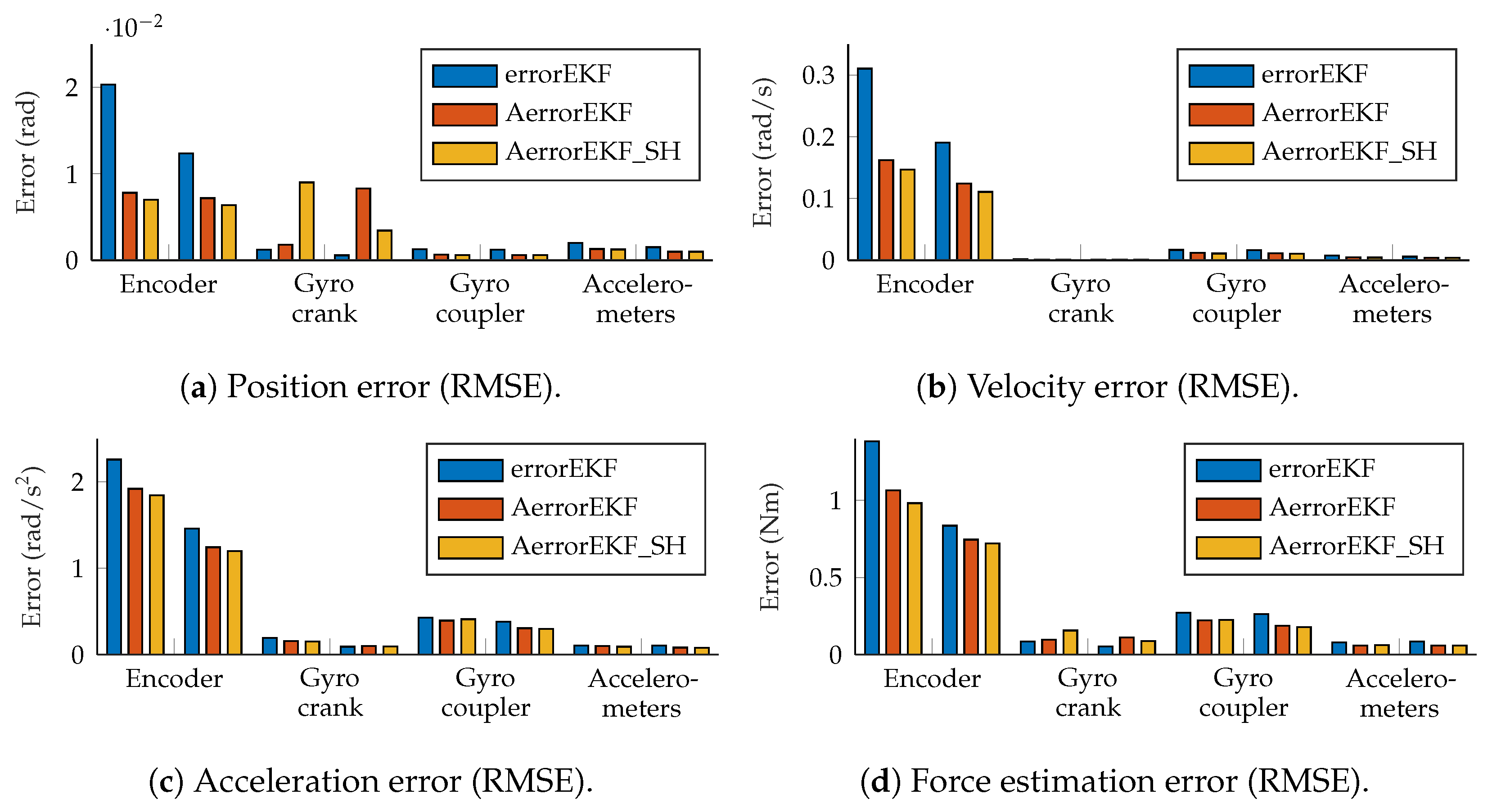
3.2. State Estimation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kalman, R. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar]
- Kálmán, R.E. Contributions to the Theory of Optimal Control. Bol. Soc. Mat. Mex. 1960, 5, 102–119. [Google Scholar]
- Doumiati, M.; Victorino, A.C.; Charara, A.; Lechner, D. Onboard Real-Time Estimation of Vehicle Lateral Tire–Road Forces and Sideslip Angle. IEEE/ASME Trans. Mechatr. 2011, 16, 601–614. [Google Scholar] [CrossRef]
- Cuadrado, J.; Dopico, D.; Perez, J.A.; Pastorino, R. Automotive observers based on multibody models and the extended Kalman filter. Multibody Syst. Dyn. 2012, 27, 3–19. [Google Scholar] [CrossRef]
- Reina, G.; Paiano, M.; Blanco-Claraco, J.L. Vehicle parameter estimation using a model-based estimator. Mech. Syst. Signal Process. 2017, 87, 227–241. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Zhang, H. Sensor Fusion Based on a Dual Kalman Filter for Estimation of Road Irregularities and Vehicle Mass Under Static and Dynamic Conditions. IEEE/ASME Trans. Mechatron. 2019, 24, 1075–1086. [Google Scholar] [CrossRef]
- Rodríguez, A.J.; Sanjurjo, E.; Pastorino, R.; Naya, M.A. State, parameter and input observers based on multibody models and Kalman filters for vehicle dynamics. Mech. Syst. Signal Process. 2021, 155, 107544. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J. A new extension of the Kalman filter to nonlinear systems. Signal Processing Sens. Fusion Target Recognit. 1997, 3068, 182–193. [Google Scholar]
- Smith, B.L.G.; Schmidt, S.F.; McGEE, L.A.; Field, M. Application of Statistical Filter Theory to the Optimal Estimation of Position and Velocity on Board a Circumlunar Vehicle; NASA Technical Report; National Aeronautics and Space Administration: Washington, DC, USA, 1962.
- McElhoe, B.A. An Assessment of the Navigation and Course Corrections for a Manned Flyby of Mars or Venus. IEEE Trans. Aerosp. Electron. Syst. 1966, AES-2, 613–623. [Google Scholar] [CrossRef]
- Merwe, R.D.V.; Wan, E.A.; Julier, S.I. Sigma-point kalman filters for nonlinear estimation and sensor-fusion—Applications to integrated navigation. In Proceedings of the Collection of Technical Papers—AIAA Guidance, Navigation, and Control Conference, Providence, RI, USA, 16–19 August 2004; Volume 3, pp. 1735–1764. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Naya, M.A.; Sanjurjo, E.; Rodríguez, A.J.; Cuadrado, J. Kalman filters based on multibody models: Linking simulation and real world. A comprehensive review. Multibody Syst. Dyn. 2023, 58, 479–521. [Google Scholar] [CrossRef]
- Sanjurjo, E.; Dopico, D.; Luaces, A.; Ángel Naya, M. State and force observers based on multibody models and the indirect Kalman filter. Mech. Syst. Signal Process. 2018, 106, 210–228. [Google Scholar] [CrossRef]
- Jaiswal, S.; Sanjurjo, E.; Cuadrado, J.; Sopanen, J.; Mikkola, A. State estimator based on an indirect Kalman filter for a hydraulically actuated multibody system. Multibody Syst. Dyn. 2022, 54, 373–398. [Google Scholar] [CrossRef] [PubMed]
- Khadim, Q.; Hagh, Y.S.; Jiang, D.; Pyrhönen, L.; Jaiswal, S.; Zhidchenko, V.; Yu, X.; Kurvinen, E.; Handroos, H.; Mikkola, A. Experimental investigation into the state estimation of a forestry crane using the unscented Kalman filter and a multiphysics model. Mech. Mach. Theory 2023, 189, 105405. [Google Scholar] [CrossRef]
- Pyrhönen, L.; Jaiswal, S.; Mikkola, A. Mass estimation of a simple hydraulic crane using discrete extended Kalman filter and inverse dynamics for online identification. Nonlinear Dyn. 2023, 111, 21487–21506. [Google Scholar] [CrossRef]
- Mazzanti, L.; De Gregoriis, D.; Willems, T.; Vanpaemel, S.; Vivet, M.; Naets, F. Robust vision-based estimation of structural parameters using Kalman filtering. Mech. Syst. Signal Process. 2025, 229, 112480. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman Filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Karasalo, M.; Hu, X. An optimization approach to adaptive Kalman filtering. Automatica 2011, 47, 1785–1793. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Gibbs, B.P. Least-Squares Estimation, Kalman Filtering, and Modeling: A Practical Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Duník, J.; Straka, O.; Kost, O.; Havlík, J. Noise covariance matrices in state-space models: A survey and comparison of estimation methods—Part I. Int. J. Adapt. Control Signal Process. 2017, 31, 1505–1543. [Google Scholar] [CrossRef]
- Sage, A.P.; Husa, G.W. Algorithms for sequential adaptive estimation of prior statistics. In Proceedings of the 1969 IEEE Symposium on Adaptive Processes (8th) Decision and Control, University Park, PA, USA, 17–19 November 1969; p. 61. [Google Scholar] [CrossRef]
- Dokoupil, J.; Vaclavek, P. Forgetting Factor Kalman Filter with Dependent Noise Processes. In Proceedings of the IEEE Conference on Decision and Control, Nice, France, 11–13 December 2019; pp. 1809–1815. [Google Scholar] [CrossRef]
- Sarkka, S.; Nummenmaa, A. Recursive Noise Adaptive Kalman Filtering by Variational Bayesian Approximations. IEEE Trans. Autom. Control 2009, 54, 596–600. [Google Scholar] [CrossRef]
- Rodríguez, A.; Sanjurjo, E.; Pastorino, R.; Naya, M. Multibody-based input and state observers using adaptive extended kalman filter. Sensors 2021, 21, 5241. [Google Scholar] [CrossRef] [PubMed]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; John Wiley and Sons: Hoboken, NJ, USA, 2001. [Google Scholar] [CrossRef]
- García de Jalón, J.; Bayo, E. Kinematic and Dynamic Simulation of Multibody Systems: The Real Time Challenge; Springer: New York, NY, USA, 1994. [Google Scholar]
- Cuadrado, J.; Dopico, D.; Gonzalez, M.; Naya, M.A. A Combined Penalty and Recursive Real-Time Formulation for Multibody Dynamics. J. Mech. Des. 2004, 126, 602. [Google Scholar] [CrossRef]
- Fraser, C.; Ulrich, S. An Adaptive Kalman Filter for Spacecraft Formation Navigation using Maximum Likelihood Estimation with Intrinsic Smoothing. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 5843–5848. [Google Scholar] [CrossRef]
- Fraser, C.; Ulrich, S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation. Acta Astronaut. 2021, 178, 700–721. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crank | Coupler | Rocker | Ground Element | |
|---|---|---|---|---|
| Mass (kg) | 2 | 8 | 5 | - |
| Length (m) | 2 | 8 | 5 | 10 |
| Left Crank | Left Coupler | Right Coupler | Right Crank | Ground Element | |
|---|---|---|---|---|---|
| Mass (kg) | 3 | 1 | 2 | 3 | - |
| Length (m) | 0.5 | 2.062 | 3.202 | 0.5 | 3 |
| Encoder | Gyroscope | Accelerometers | |
|---|---|---|---|
| Standard deviation | |||
| Sampling frequency (Hz) | 200 | 200 | 200 |
| AerrorEKF_SH | errorEKF | |||
|---|---|---|---|---|
| ML | 50 | 250 | 500 | |
| SH | ||||
| 50 | 0.0566 | 0.0038 | 0.0075 | 0.0034 |
| 250 | 0.0567 | 0.0040 | 0.0080 | 0.0034 |
| 500 | 0.0559 | 0.0038 | 0.0074 | 0.0034 |
| 750 | 0.0563 | 0.0038 | 0.0074 | 0.0034 |
| (a) First degree of freedom. | ||||
| AerrorEKF_SH | errorEKF | |||
|---|---|---|---|---|
| ML | 50 | 250 | 500 | |
| SH | ||||
| 50 | 0.628 | 0.135 | 0.116 | 0.824 |
| 250 | 0.222 | 0.126 | 0.113 | 0.824 |
| 500 | 0.221 | 0.126 | 0.110 | 0.824 |
| 750 | 0.221 | 0.126 | 0.110 | 0.824 |
| (b) Second degree of freedom. | ||||
| AerrorEKF_SH | errorEKF | |||
| ML | 50 | 250 | 500 | |
| SH | ||||
| 50 | 0.187 | 0.064 | 0.056 | 0.443 |
| 250 | 0.109 | 0.067 | 0.061 | 0.443 |
| 500 | 0.108 | 0.065 | 0.059 | 0.443 |
| 750 | 0.108 | 0.064 | 0.059 | 0.443 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez, A.J.; Sanjurjo, E.; Naya, M.Á. An Enhanced Adaptive Kalman Filter for Multibody Model Observation. Sensors 2025, 25, 2218. https://doi.org/10.3390/s25072218
Rodríguez AJ, Sanjurjo E, Naya MÁ. An Enhanced Adaptive Kalman Filter for Multibody Model Observation. Sensors. 2025; 25(7):2218. https://doi.org/10.3390/s25072218
Chicago/Turabian StyleRodríguez, Antonio J., Emilio Sanjurjo, and Miguel Ángel Naya. 2025. "An Enhanced Adaptive Kalman Filter for Multibody Model Observation" Sensors 25, no. 7: 2218. https://doi.org/10.3390/s25072218
APA StyleRodríguez, A. J., Sanjurjo, E., & Naya, M. Á. (2025). An Enhanced Adaptive Kalman Filter for Multibody Model Observation. Sensors, 25(7), 2218. https://doi.org/10.3390/s25072218