



Vega: LLM-Driven Intelligent Chatbot Platform for Internet of Things Control and Development


Abstract
1. Introduction
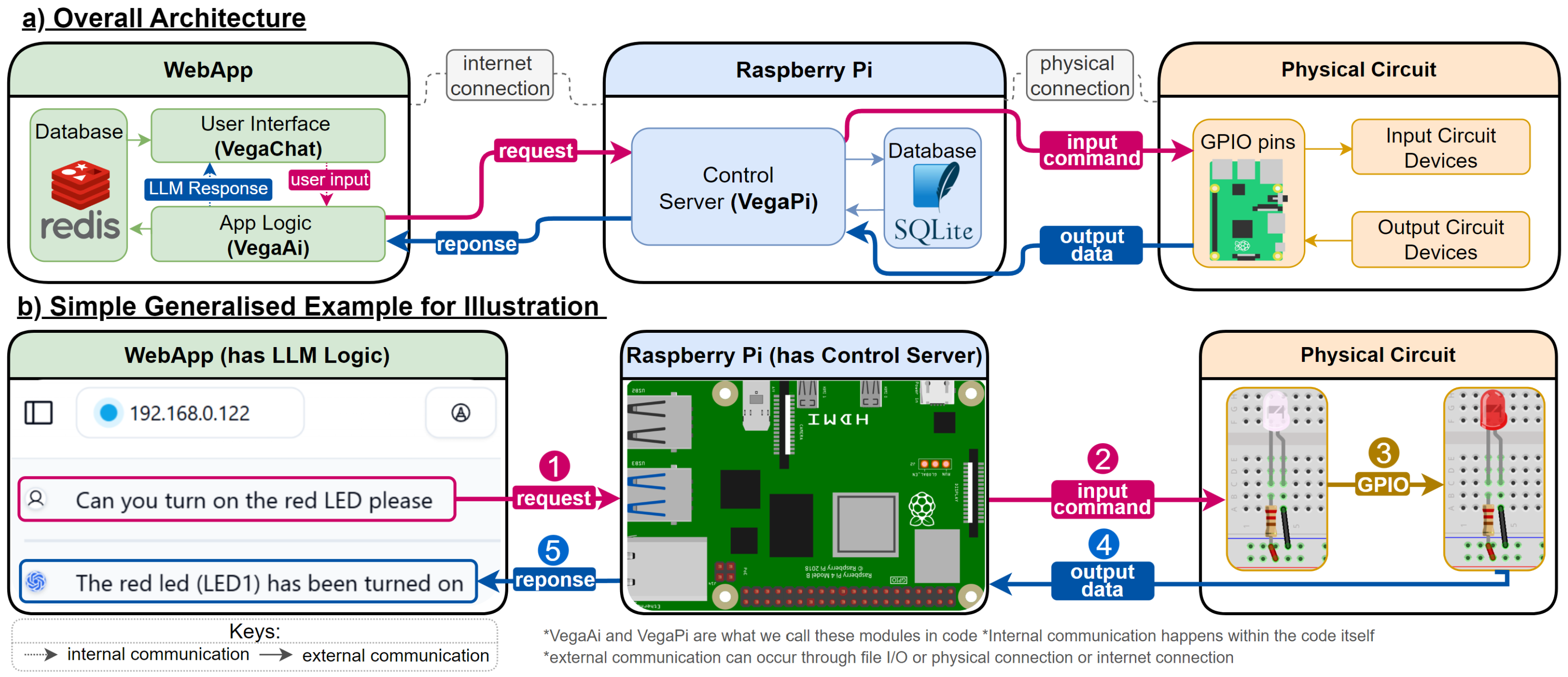
- We developed a chat web app that executes queries on the RPi, which contains a control server that manages the execution on a circuit and communication with the web app.
- We develop a multi-agent LLM framework that translates natural language commands into executable instructions for IoT devices, capable of handling complex, conditional logic without additional coding on the RPi.
- We showcase the system’s real-world applicability through physical circuit implementations and provide insights into its limitations and potential scalability.
- We implement and evaluate the system, demonstrating the feasibility and effectiveness of LLM-driven IoT control across various task complexities and user scenarios, including an evaluation mode with automated test generation and performance assessment.
2. Background and Related Work
2.1. Industrial Applications of LLMs
2.2. Natural Language Processing for IoT
2.3. Language-Oriented Architectures
2.4. Comparative Analysis and Research Positioning
3. Methodology
3.1. Overall Architecture
3.2. Physical Circuit Design
- Environmental Sensors: Temperature and humidity sensors (DHT series), barometric pressure sensors, air quality sensors, and light intensity sensors for comprehensive environmental monitoring.
- Motion and Proximity Detection: Ultrasonic sensors (HC-SR04), passive infrared (PIR) motion sensors, accelerometers, gyroscopes, and magnetometers for spatial awareness and movement detection.
- Position and Navigation: GPS modules, compass sensors, and encoders for location tracking and orientation sensing.
- User Input Interfaces: Push buttons, switches, potentiometers, rotary encoders, and keypad matrices for direct user interaction.
- Safety and Security: Limit switches, reed switches, smoke detectors, gas sensors, and vibration sensors for safety monitoring applications.
- Communication Modules: Wi-Fi modules, Bluetooth adapters, LoRa transceivers, and cellular modems for wireless connectivity.
- Image and Audio Capture: Camera modules, microphones, and sound level meters for multimedia data acquisition.
- Visual Indicators: LEDs (single color and RGB), seven-segment displays, dot matrix displays, and LCD/OLED screens for information presentation.
- Motor Control: Servo motors, stepper motors, DC motors, and brushless motors for precise mechanical control.
- Switching and Relay Control: Mechanical relays, solid-state relays, and transistor switches for high-power device control.
- Cooling and Ventilation: Fans, pumps, and solenoid valves for fluid and air management
- Audio Output: Speakers, buzzers, and piezoelectric elements for audible feedback and alerts.
- Heating Elements: Resistive heaters, Peltier modules, and heating pads for temperature control applications.
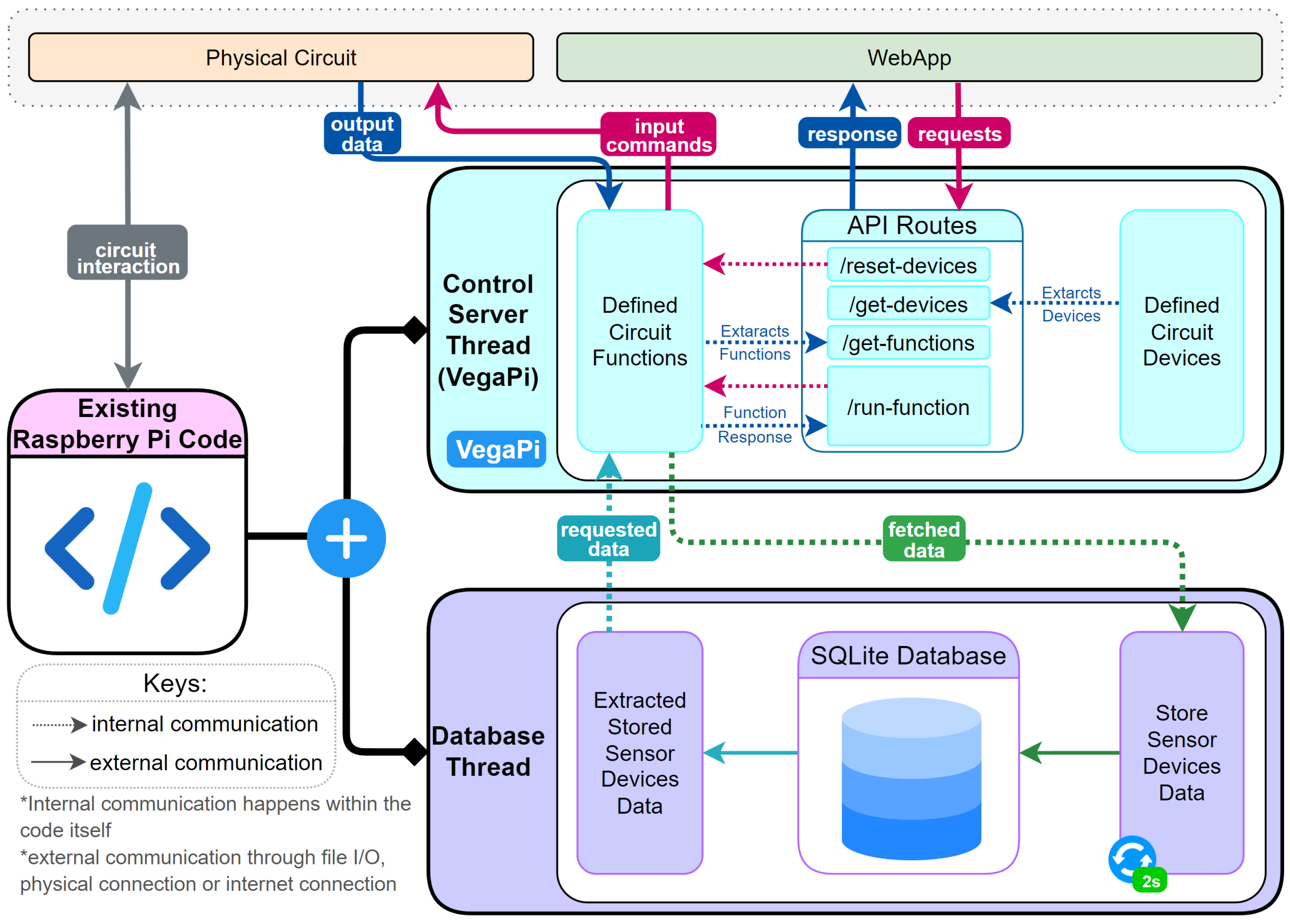
3.3. Raspberry Pi Design
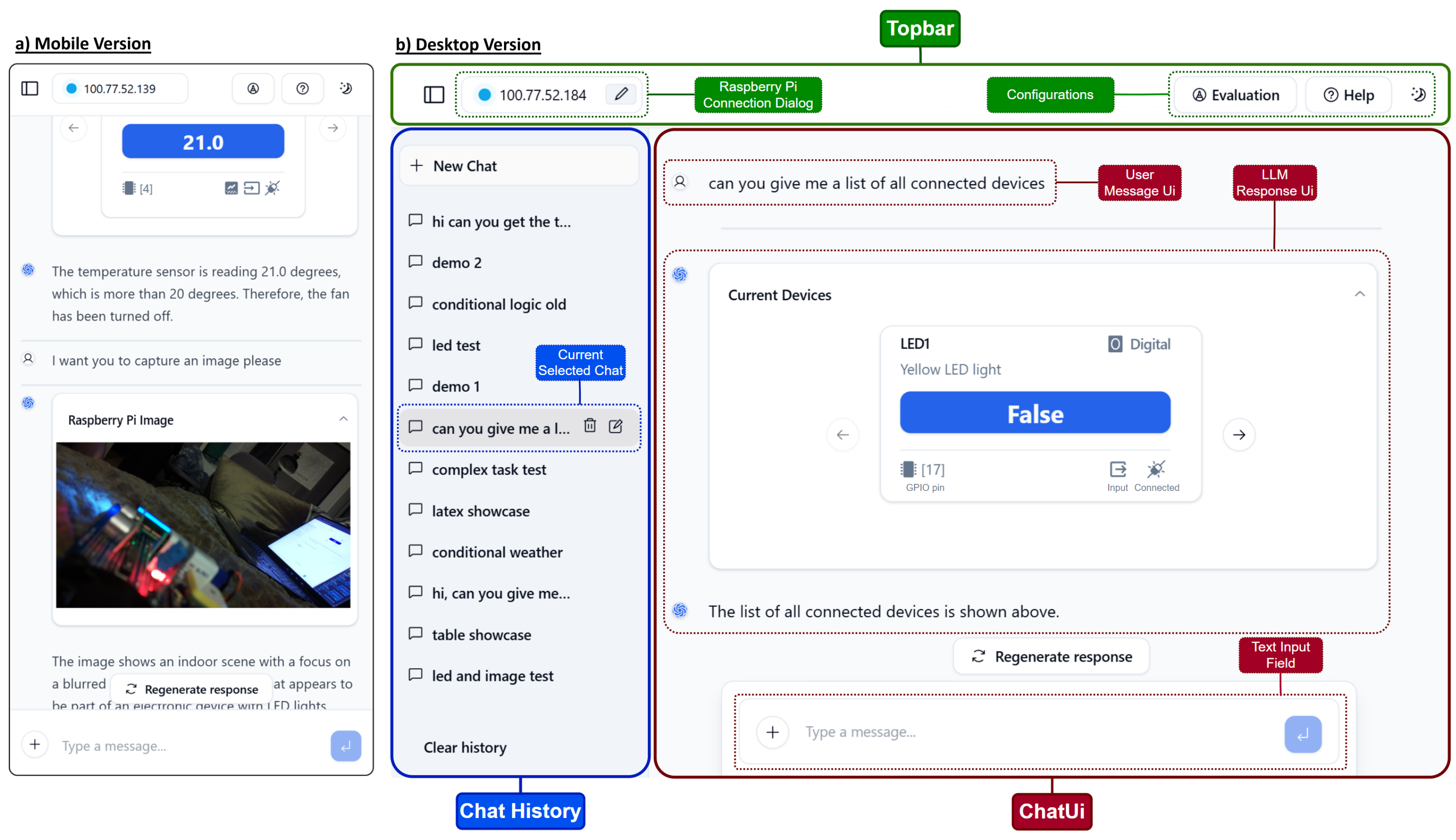
3.4. Web App User Interface
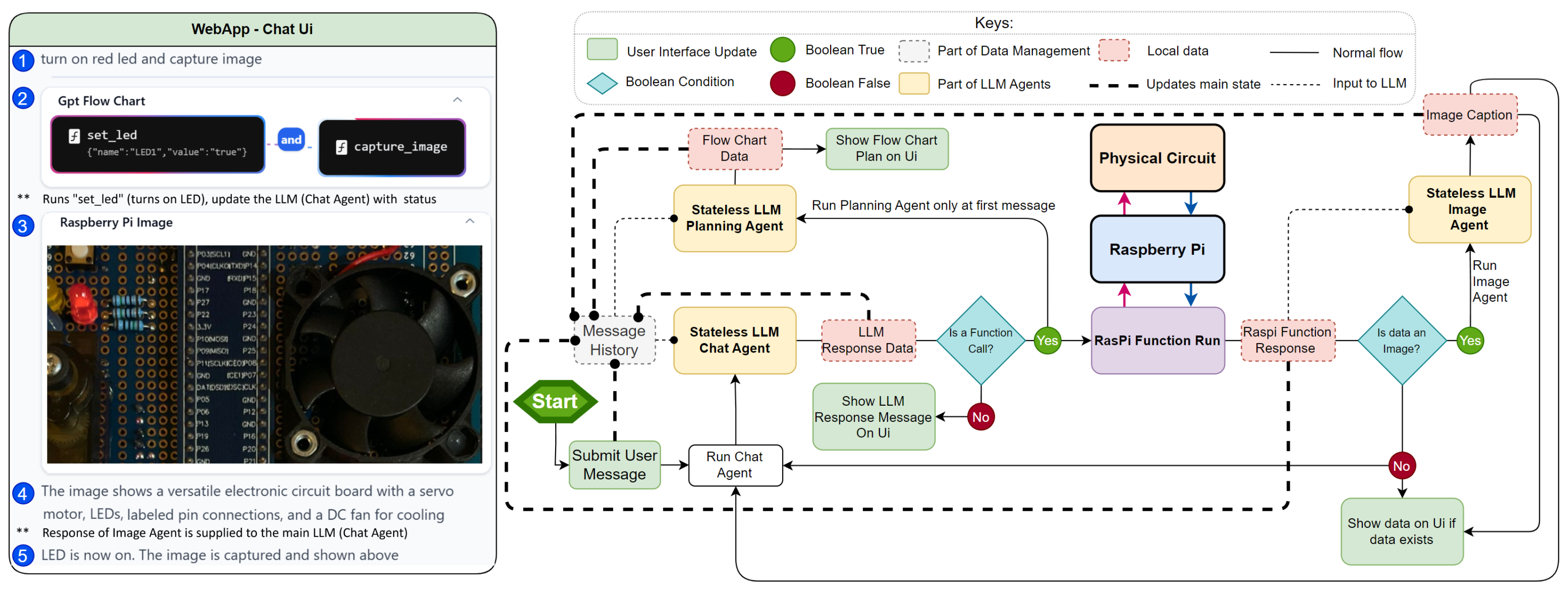
3.5. Web App Logic
- The Stateless LLM Planning Agent generates a plan, which is visualized as a flowchart in the user interface.
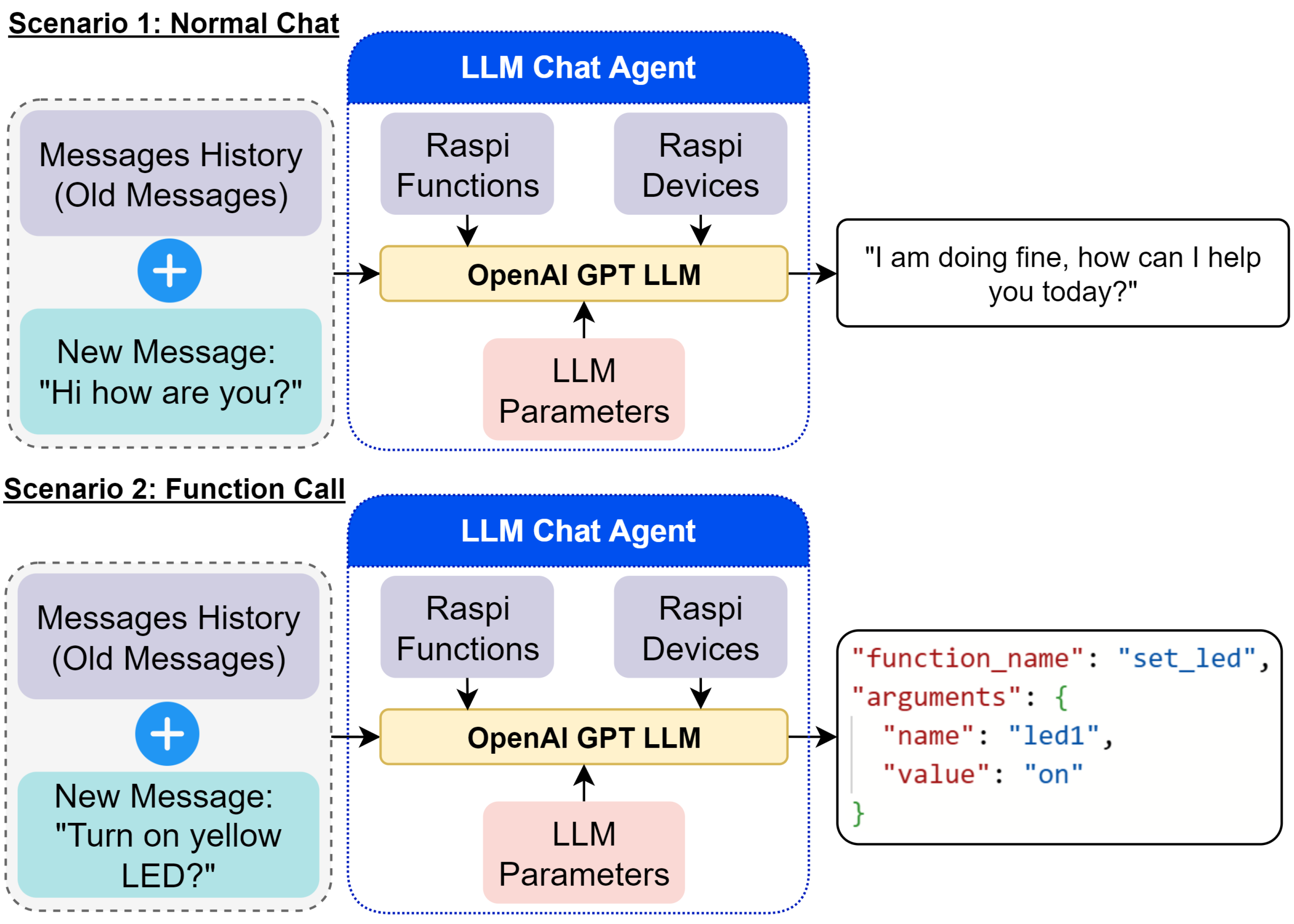
- The Stateless LLM Chat Agent processes the message and determines if a function call to the RPi is necessary.
- If required, the function is sent and executed on the RPi, which returns a response.
- For image data, the Stateless LLM Image Agent analyzes and generates a description used by the LLM Chat Agent to execute subsequent functions and logic.
- Results are displayed on the web application’s UI, providing feedback to the user.
4. Experiment and Validation
4.1. Representative Real-Life Case Study
4.2. Experimental Design and Baseline Comparison
4.3. Message Complexity Classification and Labeling Criteria
4.4. Hardware Issue Management and System Robustness
4.5. Automated Evaluation
4.6. Result Analysis
4.7. Error Analysis with Concrete Examples
5. Conclusions
5.1. Limitations
5.2. Future Work
5.3. Critical Analysis and Real-World Deployment Challenges
5.4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kumar, P. Large language models (LLMs): Survey, technical frameworks, and future challenges. Artif. Intell. Rev. 2024, 57, 260. [Google Scholar] [CrossRef]
- Liao, Y.; de Freitas Rocha Loures, E.; Deschamps, F. Industrial Internet of Things: A Systematic Literature Review and Insights. IEEE Internet Things J. 2018, 5, 4515–4525. [Google Scholar] [CrossRef]
- Flohr, L.A.; Kalinke, S.; Krüger, A.; Wallach, D.P. Chat or Tap?—Comparing Chatbots with ‘Classic’ Graphical User Interfaces for Mobile Interaction with Autonomous Mobility-on-Demand Systems. In Proceedings of the 23rd International Conference on Mobile Human-Computer Interaction, MobileHCI ’21, New York, NY, USA, 27 September–1 October 2021. [Google Scholar] [CrossRef]
- Kassab, W.; Darabkh, K.A. A–Z survey of Internet of Things: Architectures, protocols, applications, recent advances, future directions and recommendations. J. Netw. Comput. Appl. 2020, 163, 102663. [Google Scholar] [CrossRef]
- OpenAI. Generative Pre-Trained Transformer (GPT) Models; OpenAI: San Francisco, CA, USA, 2023. [Google Scholar]
- Al-Qaseemi, S.A.; Almulhim, H.A.; Almulhim, M.F.; Chaudhry, S.R. IoT architecture challenges and issues: Lack of standardization. In Proceedings of the 2016 Future Technologies Conference (FTC), San Francisco, CA, USA, 6–7 December 2016; pp. 731–738. [Google Scholar] [CrossRef]
- Taylor, R.N.; Medvidovic, N.; Dashofy, E.M. Software Architecture: Foundations, Theory, and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2010; p. 736. [Google Scholar]
- Kadiyala, E.; Meda, S.; Basani, R.; Muthulakshmi, S. Global industrial process monitoring through IoT using Raspberry pi. In Proceedings of the 2017 International Conference on Nextgen Electronic Technologies: Silicon to Software (ICNETS2), Chennai, India, 23–25 March 2017; pp. 260–262. [Google Scholar] [CrossRef]
- Thompson, R.; Anderson, K.; White, S. Usability Challenges in GUI-Based IoT Device Management: A User Experience Study. Int. J.-Hum.-Comput. Stud. 2022, 165, 102–118. [Google Scholar]
- Brown, A.; Wilson, K. Understanding the Limitations of Voice Assistants in Smart Home Environments. In Proceedings of the ACM Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 30 April–5 May 2022; pp. 1–12. [Google Scholar]
- Kumar, S.; Patel, M.; Chen, L. Analyzing Amazon Alexa Skills: Capabilities, Limitations, and User Satisfaction. Comput. Hum. Behav. 2023, 140, 107–125. [Google Scholar]
- Garcia, P.; Martinez, J.; Lopez, C. Rule-Based Systems in IoT: A Comprehensive Survey and Future Directions. Comput. Netw. 2023, 225, 109–125. [Google Scholar]
- Lee, J.; Kim, H.; Park, S. IFTTT and End-User Programming: A Usability Study of Rule-Based IoT Automation. In Proceedings of the International Conference on Internet of Things, Honolulu, HI, USA, 10–14 December 2022; pp. 45–58. [Google Scholar]
- Smith, J.; Johnson, M.; Brown, D. Accessibility challenges in IoT systems: A comprehensive survey. IEEE Access 2023, 11, 12345–12358. [Google Scholar]
- Williams, D.; Taylor, P.; Robinson, A. IoT Adoption Among Elderly Users: Barriers, Challenges, and Design Recommendations. Univers. Access Inf. Soc. 2022, 21, 567–582. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Maddigan, P.; Susnjak, T. Chat2VIS: Generating Data Visualizations via Natural Language Using ChatGPT, Codex and GPT-3 Large Language Models. IEEE Access 2023, 11, 45181–45193. [Google Scholar] [CrossRef]
- Vemprala, S.H.; Bonatti, R.; Bucker, A.; Kapoor, A. ChatGPT for Robotics: Design Principles and Model Abilities. IEEE Access 2024, 12, 55682–55696. [Google Scholar] [CrossRef]
- Singh, I.; Blukis, V.; Mousavian, A.; Goyal, A.; Xu, D.; Tremblay, J.; Fox, D.; Thomason, J.; Garg, A. ProgPrompt: Program generation for situated robot task planning using large language models. Auton. Robot. 2023, 47, 999–1012. [Google Scholar] [CrossRef]
- Driess, D.; Xia, F.; Sajjadi, M.S.M.; Lynch, C.; Chowdhery, A.; Ichter, B.; Wahid, A.; Tompson, J.; Vuong, Q.; Yu, T.; et al. PaLM-E: An embodied multimodal language model. In Proceedings of the 40th International Conference on Machine Learning, ICML’23, JMLR.org, Honolulu, HI, USA, 23–29 July 2023. [Google Scholar]
- Kannan, S.S.; Venkatesh, V.L.N.; Min, B.C. SMART-LLM: Smart Multi-Agent Robot Task Planning using Large Language Models. In Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, 14–18 October 2024; Available online: https://ieeexplore.ieee.org/document/10802322 (accessed on 15 January 2024).
- Wu, J.; Antonova, R.; Kan, A.; Lepert, M.; Zeng, A.; Song, S.; Bohg, J.; Rusinkiewicz, S.; Funkhouser, T. TidyBot: Personalized robot assistance with large language models. Auton. Robot. 2023, 47, 1087–1102. [Google Scholar] [CrossRef]
- King, E.; Yu, H.; Lee, S.; Julien, C. Sasha: Creative Goal-Oriented Reasoning in Smart Homes with Large Language Models. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2024, 8, 1–38. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Wang, Q. Evolution of Smart Home Interfaces: From Command-Line to Natural Language. IEEE Internet Things J. 2019, 6, 12543–12556. [Google Scholar]
- Miller, T.; Jones, R.; Clark, B. Keyword-Based IoT Control Systems: Performance Analysis and User Experience. In Proceedings of the International Conference on Ubiquitous Computing, Sydney, Australia, 19–20 December 2020; pp. 234–247. [Google Scholar]
- Rodriguez, C.; Singh, A.; Murphy, E. Comparative Analysis of Voice Assistant Platforms for Smart Home Control. Smart Cities 2023, 6, 1024–1041. [Google Scholar]
- Petrović, N.; Koničanin, S.; Suljović, S. ChatGPT in IoT Systems: Arduino Case Studies. In Proceedings of the 2023 IEEE 33rd International Conference on Microelectronics (MIEL), Nis, Serbia, 16–18 October 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Zhong, N.; Wang, Y.; Xiong, R.; Zheng, Y.; Li, Y.; Ouyang, M.; Shen, D.; Zhu, X. CASIT: Collective Intelligent Agent System for Internet of Things. IEEE Internet Things J. 2024, 11, 19646–19656. [Google Scholar] [CrossRef]
- Sarzaeim, P.; Mahmoud, Q.H.; Azim, A. A Framework for LLM-Assisted Smart Policing System. IEEE Access 2024, 12, 74915–74929. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, H.; Chen, X.; Wang, Y.; Yue, Z. Building a Natural Language Query and Control Interface for IoT Platforms. IEEE Access 2022, 10, 68655–68668. [Google Scholar] [CrossRef]
- Daniel, G.; Cabot, J.; Deruelle, L.; Derras, M. Xatkit: A Multimodal Low-Code Chatbot Development Framework. IEEE Access 2020, 8, 15332–15346. [Google Scholar] [CrossRef]
- Jiang, F.; Dong, L.; Peng, Y.; Wang, K.; Yang, K.; Pan, C.; Niyato, D.; Dobre, O.A. Large Language Model Enhanced Multi-Agent Systems for 6G Communications. IEEE Wirel. Commun. 2023, 31, 48–55. [Google Scholar] [CrossRef]
- Chen, T.Y.; Chiu, Y.C.; Bi, N.; Tsai, R.T.H. Multi-Modal Chatbot in Intelligent Manufacturing. IEEE Access 2021, 9, 82118–82129. [Google Scholar] [CrossRef]
- Santos, G.A.; de Andrade, G.G.; Silva, G.R.S.; Duarte, F.C.M.; Costa, J.P.J.D.; de Sousa, R.T. A Conversation-Driven Approach for Chatbot Management. IEEE Access 2022, 10, 8474–8486. [Google Scholar] [CrossRef]
- Li, C.; Zhang, X.; Chrysostomou, D.; Yang, H. ToD4IR: A Humanised Task-Oriented Dialogue System for Industrial Robots. IEEE Access 2022, 10, 91631–91649. [Google Scholar] [CrossRef]
- Roller, S.; Dinan, E.; Goyal, N.; Ju, D.; Williamson, M.; Liu, Y.; Xu, J.; Ott, M.; Smith, E.M.; Boureau, Y.L.; et al. Recipes for Building an Open-Domain Chatbot. In Proceedings of the 16th Conference of the European Chapter of the Association for Computational Linguistics: Main Volume, Online, 19–23 April 2021; Merlo, P., Tiedemann, J., Tsarfaty, R., Eds.; Association for Computational Linguistics: Stroudsburg, PA, USA, 2021; pp. 300–325. [Google Scholar] [CrossRef]
- Tanenbaum, A.S.; Van Steen, M. Distributed Systems: Principles and Paradigms, 1st ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Han, J.; E, H.; Le, G.; Du, J. Survey on NoSQL database. In Proceedings of the 2011 6th International Conference on Pervasive Computing and Applications, Port Elizabeth, South Africa, 26–28 October 2011; pp. 363–366. [Google Scholar] [CrossRef]
- Bhosale, S.; Patil, M.; Patil, P. International Journal of Computer Science and Mobile Computing SQLite: Light Database System. Int. J. Comput. Sci. Mob. Comput. 2015, 44, 882–885. [Google Scholar]
- Nikulchev, E.; Ilin, D.; Gusev, A. Technology Stack Selection Model for Software Design of Digital Platforms. Mathematics 2021, 9, 308. [Google Scholar] [CrossRef]
- Team Rocket. React—A JavaScript Library for Building User Interfaces, Meta Platforms Inc.: Menlo Park, CA, USA, 2024. Available online: https://react.dev (accessed on 15 January 2024).
- WorkOS. Radix UI, WorkOS Inc.: San Francisco, CA, USA, 2022; Open-Source UI Component Library for Building High-Quality, Accessible Design Systems and Web Apps. Available online: https://www.radix-ui.com/ (accessed on 15 January 2024).
- Tailwind Labs Inc. Tailwind CSS, Tailwind Labs Inc.: Online, 2023. Available online: https://tailwindcss.com/ (accessed on 15 January 2024).
- Vercel Inc. Next.js Documentation, Vercel Inc.: San Francisco, CA, USA, 2024. Available online: https://nextjs.org/docs (accessed on 15 January 2024).
- Ronacher, A. Flask: Web Development, One Drop at a Time, Pallets Projects: Online, 2024. Available online: https://palletsprojects.com/p/flask/ (accessed on 15 January 2024).
- Wings, E. Sensors and Modules. Available online: https://www.electronicwings.com/sensors-modules (accessed on 15 January 2024).
- Smith, J.; Davis, M. Testing and Debugging IoT Projects with Raspberry Pi. J. Internet Things 2020, 8, 123–135. [Google Scholar]
- Brown, M.; Green, S. Integrating Camera Modules with Raspberry Pi for Image Capture Applications. IEEE Trans. Consum. Electron. 2018, 64, 145–152. [Google Scholar]
- Wilkinson, B.; Allen, M. Parallel Programming: Techniques and Applications Using Networked Workstations and Parallel Computers, 2nd ed.; Pearson/Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Wytrębowicz, J.; Cabaj, K.; Krawiec, J. Messaging Protocols for IoT Systems—A Pragmatic Comparison. Sensors 2021, 21, 6904. [Google Scholar] [CrossRef]
- Kim, T.; Wang, Y.; Chaturvedi, V.; Gupta, L.; Kim, S.; Kwon, Y.; Ha, S. LLMem: Estimating GPU Memory Usage for Fine-Tuning Pre-Trained LLMs. arXiv 2024, arXiv:2404.10933. [Google Scholar]
- Yang, H.; Yue, S.; He, Y. Auto-GPT for Online Decision Making: Benchmarks and Additional Opinions. arXiv 2023, arXiv:2306.02224. [Google Scholar]
- John, M.; Maurer, F.; Tessem, B. Human and social factors of software engineering. In Proceedings of the 27th International Conference on Software Engineering, Los Alamitos, CA, USA, 15–21 May 2005; p. 686. [Google Scholar] [CrossRef]
- Kim, C.Y.; Lee, C.P.; Mutlu, B. Understanding Large-Language Model (LLM)-powered Human-Robot Interaction. In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, HRI ’24, Boulder, CO, USA, 11–14 March 2024; pp. 371–380. [Google Scholar] [CrossRef]
- Babar, M.; Zhu, L.; Jeffery, R. A framework for classifying and comparing software architecture evaluation methods. In Proceedings of the 2004 Australian Software Engineering Conference, Melbourne, Australia, 13–16 April 2004; pp. 309–318. [Google Scholar] [CrossRef]
- Ruman. Setting Top-k, Top-P and Temperature in LLMS. 2024. Available online: https://rumn.medium.com/setting-top-k-top-p-and-temperature-in-llms-3da3a8f74832 (accessed on 19 August 2024).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | NL Capability | IoT Integration | Accessibility | Deployment | Key Limitations |
|---|---|---|---|---|---|
| Traditional GUI | None | Native | Low | Simple | Requires technical knowledge |
| Voice Assistants (Alexa/Google) | Limited | Skill-based | Medium | Medium | Predefined commands, limited context |
| Rule-based Systems (IFTTT) | None | Good | Low | Medium | No natural language, rigid logic |
| Chat2VIS [17] | High | Limited | Medium | Complex | Visualization-focused, not IoT control |
| CASIT [28] | Medium | Good | Medium | Complex | Limited user interaction paradigms |
| ProgPrompt [19] | High | Robotics only | Medium | Complex | Robotics-specific, not general IoT |
| PaLM-E [20] | High | Limited | Low | Very Complex | Requires extensive training, resource-intensive |
| Vega (This Work) | High | Native | High | Medium | Requires internet connectivity |
| Symbol | Pin Type | Description |
|---|---|---|
| ULTS | Input | Ultrasonic distance sensor in cm |
| CAM | Input | Camera device for image acquisition |
| GPS | Input | GPS device for longitude and latitude coordinates |
| TMP | Input | Temperature sensor in degrees celsius |
| FAN | Output | 12V fan controlled through digital GPIO in relay |
| LCD | Output | LCD for displaying text data |
| SRV | Output | Servo motor rotates to given set of angles |
| LED1 | Output | Yellow LED light |
| LED2 | Output | Red LED light |
| LED3 | Output | Blue LED light |
| Function | Description | Use Case |
|---|---|---|
| set_led | Toggles specific LED | “Turn on yellow LED” |
| set_fan | Toggles fan on or off | “Turn on the fan” |
| get_recorded_sensor_data | Gets interval sensordata from database | “Plot me the distance data in last 30 s” |
| get_raspberry_stats | Gets CPU, RAM, disk of RPi | “What is the current disk usage” |
| capture_image | Capture and uploadimage to the cloud | “Capture an image, does it contain a pen?” |
| get_connected_devices | Fetches data of connected devices | “What is the current humidity and temperature” |
| get_location_ | Gets the current location from GPS | “From the location are we currently in Leeds?” |
| set_servo_angles | Turn servo to certain angle | “Turn the servo to 10 then 180 degrees” |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Safi, H.; Ibrahim, H.; Steenson, P. Vega: LLM-Driven Intelligent Chatbot Platform for Internet of Things Control and Development. Sensors 2025, 25, 3809. https://doi.org/10.3390/s25123809
Al-Safi H, Ibrahim H, Steenson P. Vega: LLM-Driven Intelligent Chatbot Platform for Internet of Things Control and Development. Sensors. 2025; 25(12):3809. https://doi.org/10.3390/s25123809
Chicago/Turabian StyleAl-Safi, Harith, Harith Ibrahim, and Paul Steenson. 2025. "Vega: LLM-Driven Intelligent Chatbot Platform for Internet of Things Control and Development" Sensors 25, no. 12: 3809. https://doi.org/10.3390/s25123809
APA StyleAl-Safi, H., Ibrahim, H., & Steenson, P. (2025). Vega: LLM-Driven Intelligent Chatbot Platform for Internet of Things Control and Development. Sensors, 25(12), 3809. https://doi.org/10.3390/s25123809