
Embedded Sensor Data Fusion and TinyML for Real-Time Remaining Useful Life Estimation of UAV Li Polymer Batteries



Abstract
1. Introduction
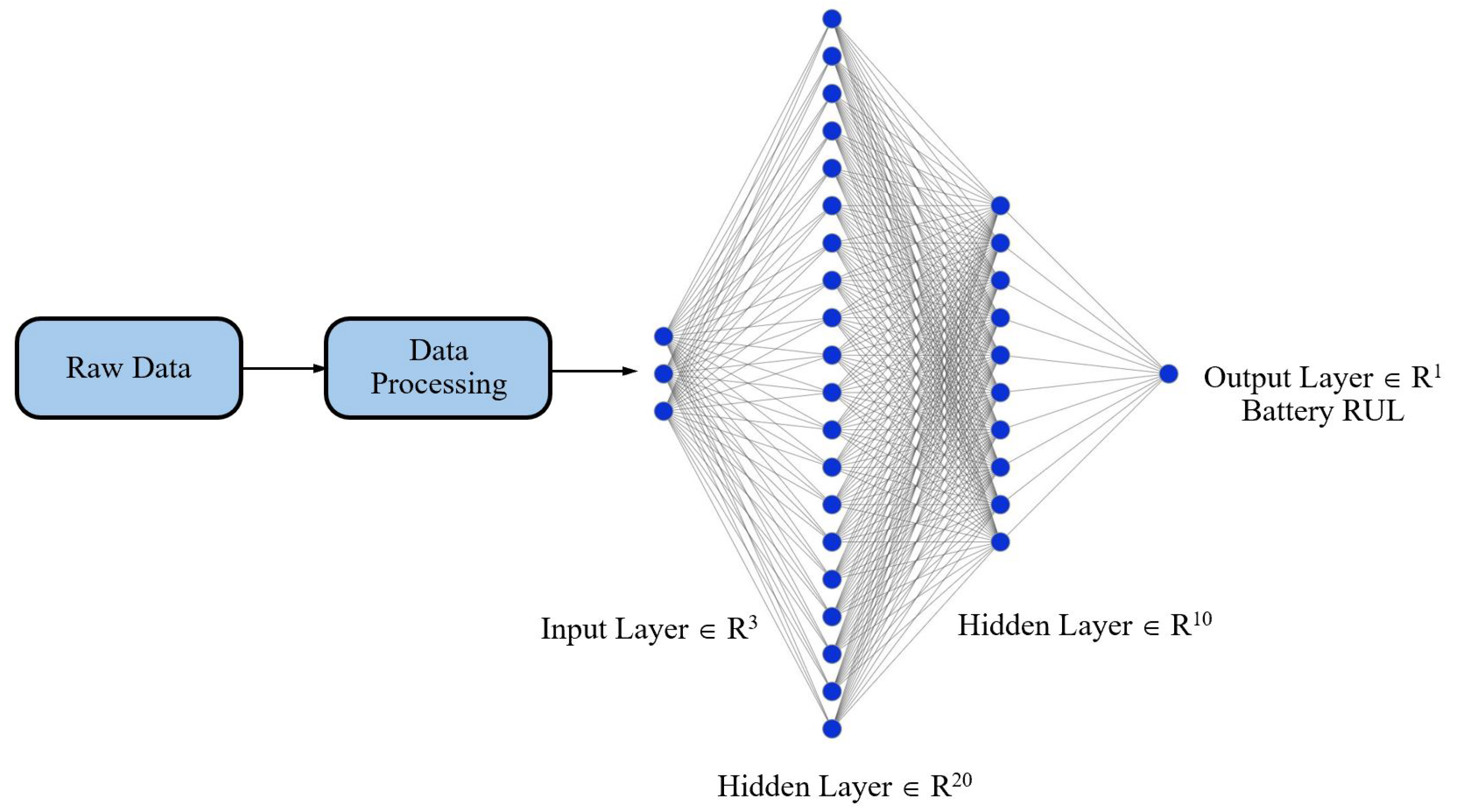
- Embedded Sensor Data Fusion: A lightweight data fusion pipeline is developed to integrate voltage, discharge time, and capacity measurements into a unified feature set for the feedforward neural network (FFNN) model.
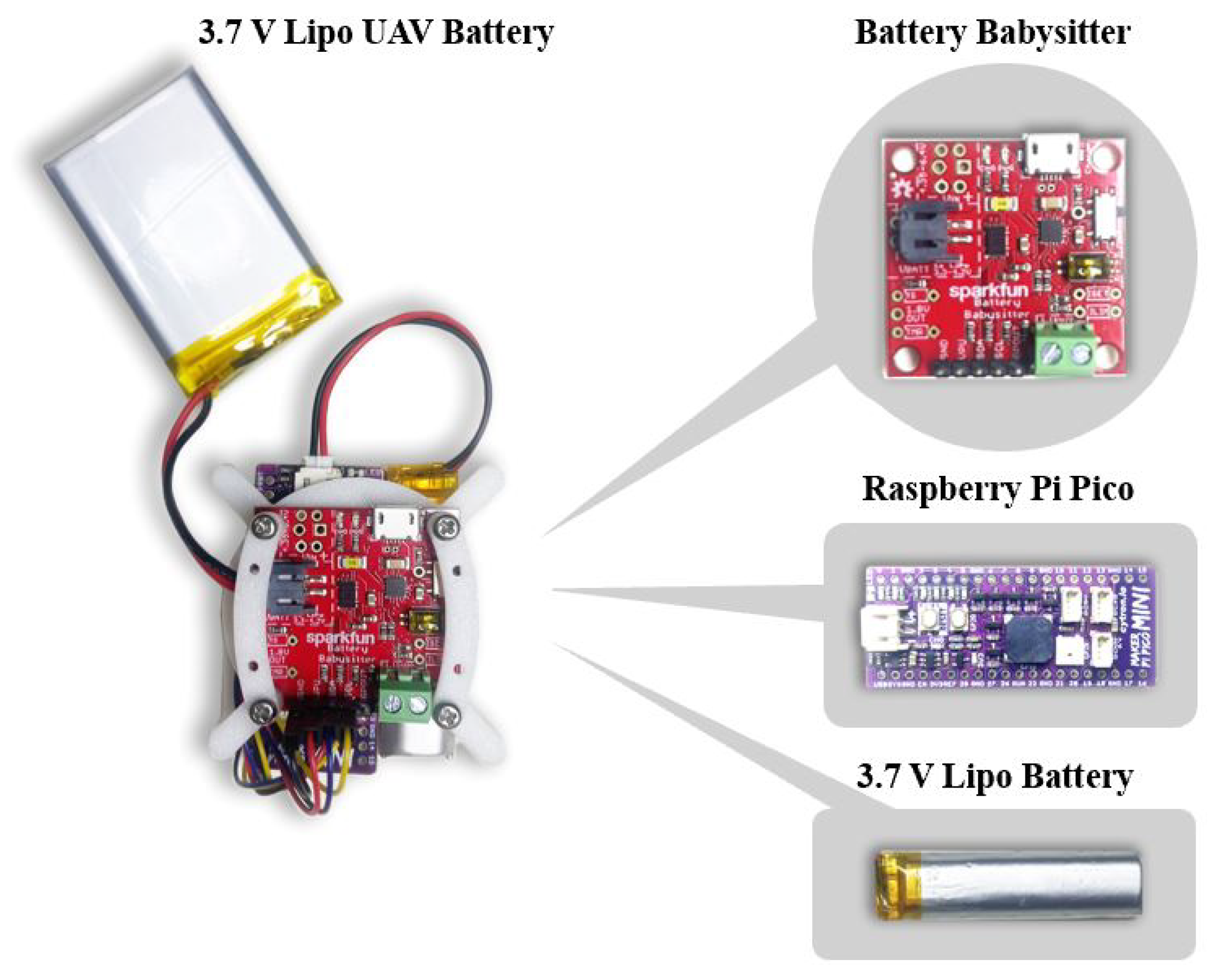
- TinyML Deployment: A compact RUL estimation model is implemented on the Raspberry Pi RP2040 microcontroller, enabling low-cost, real-world deployment.
- Model Optimization with Edge Impulse: The EON™Compiler is utilized to compress and optimize the neural network, enabling fast and energy-efficient on-device inference.
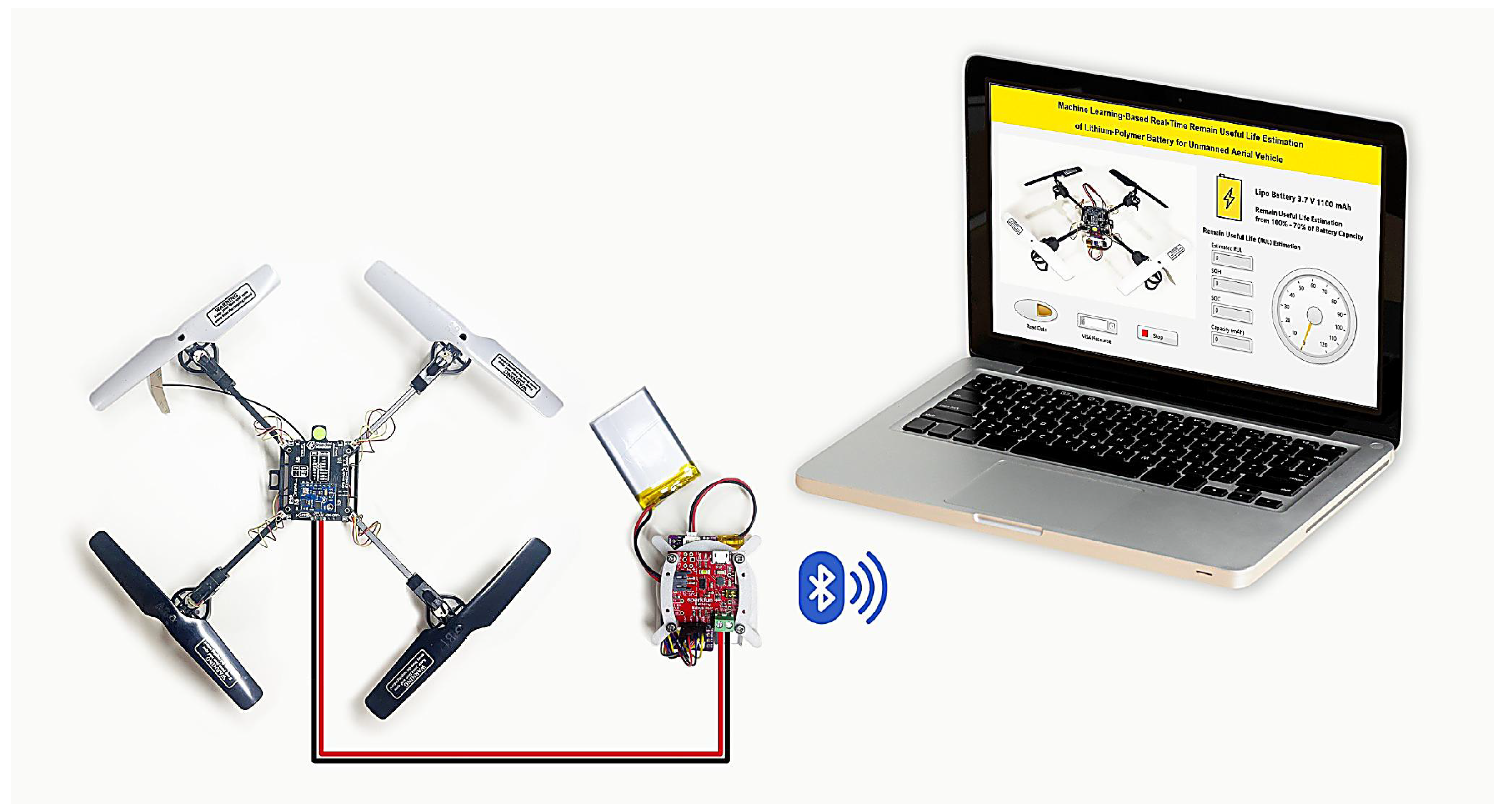
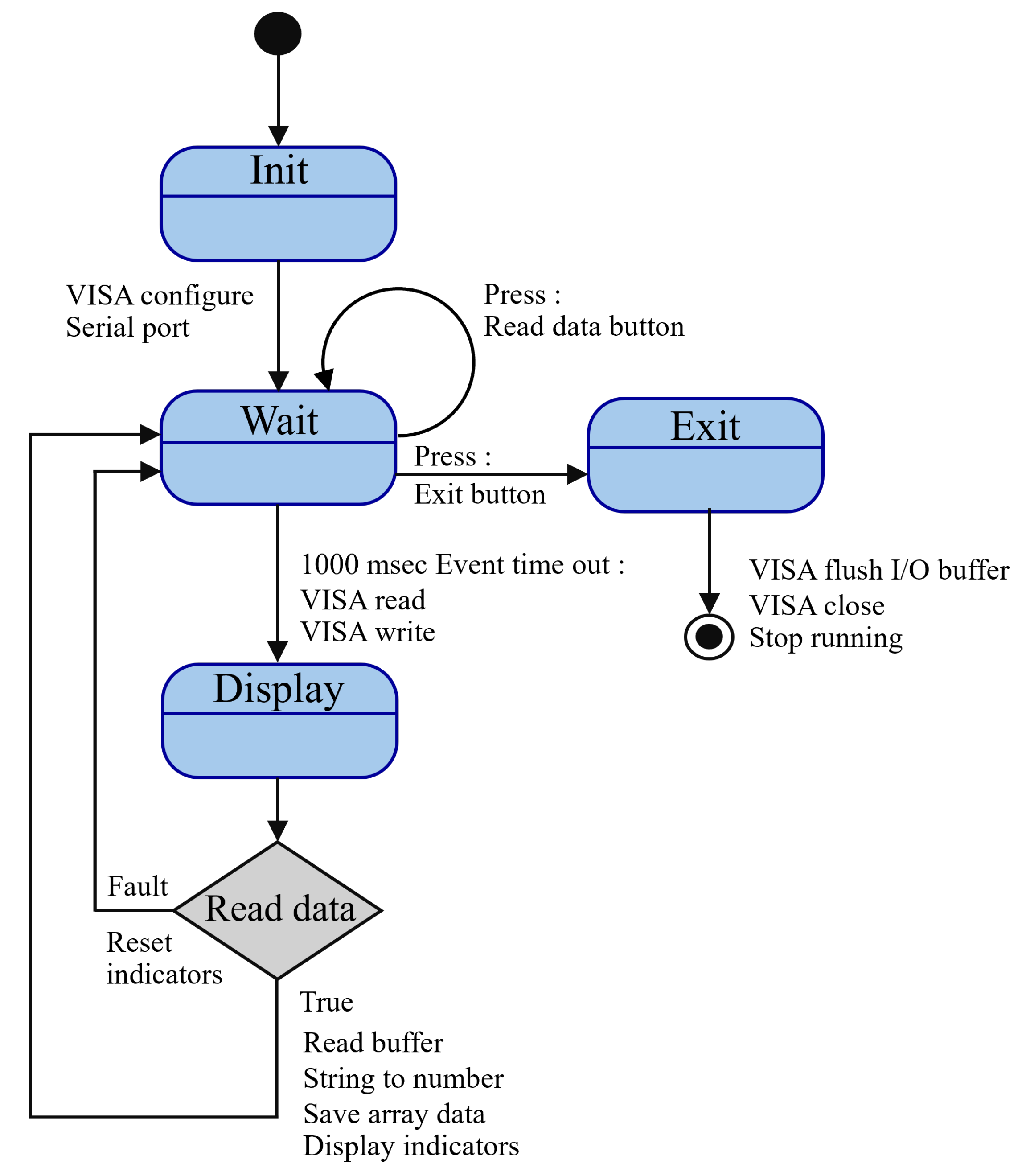
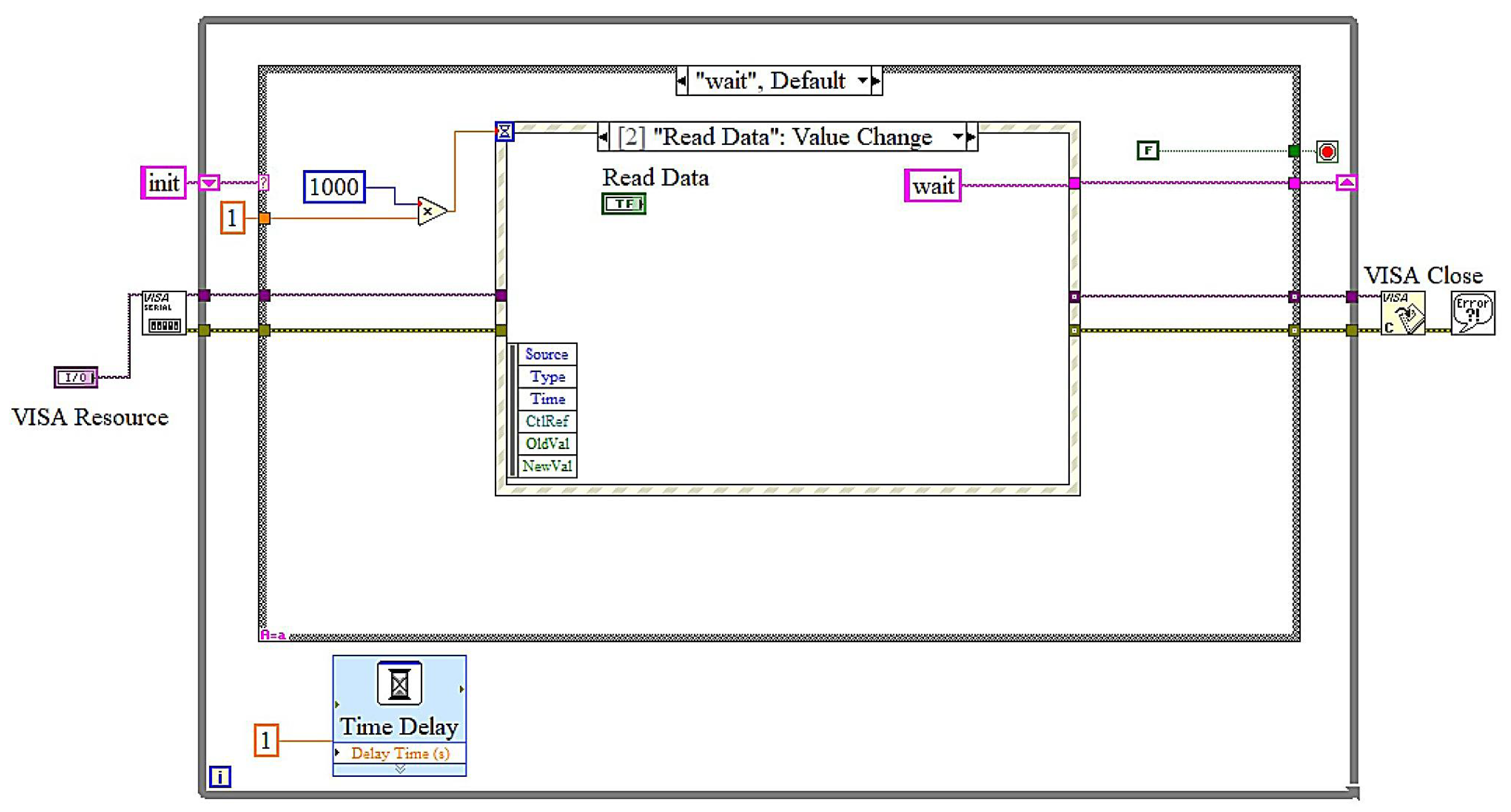
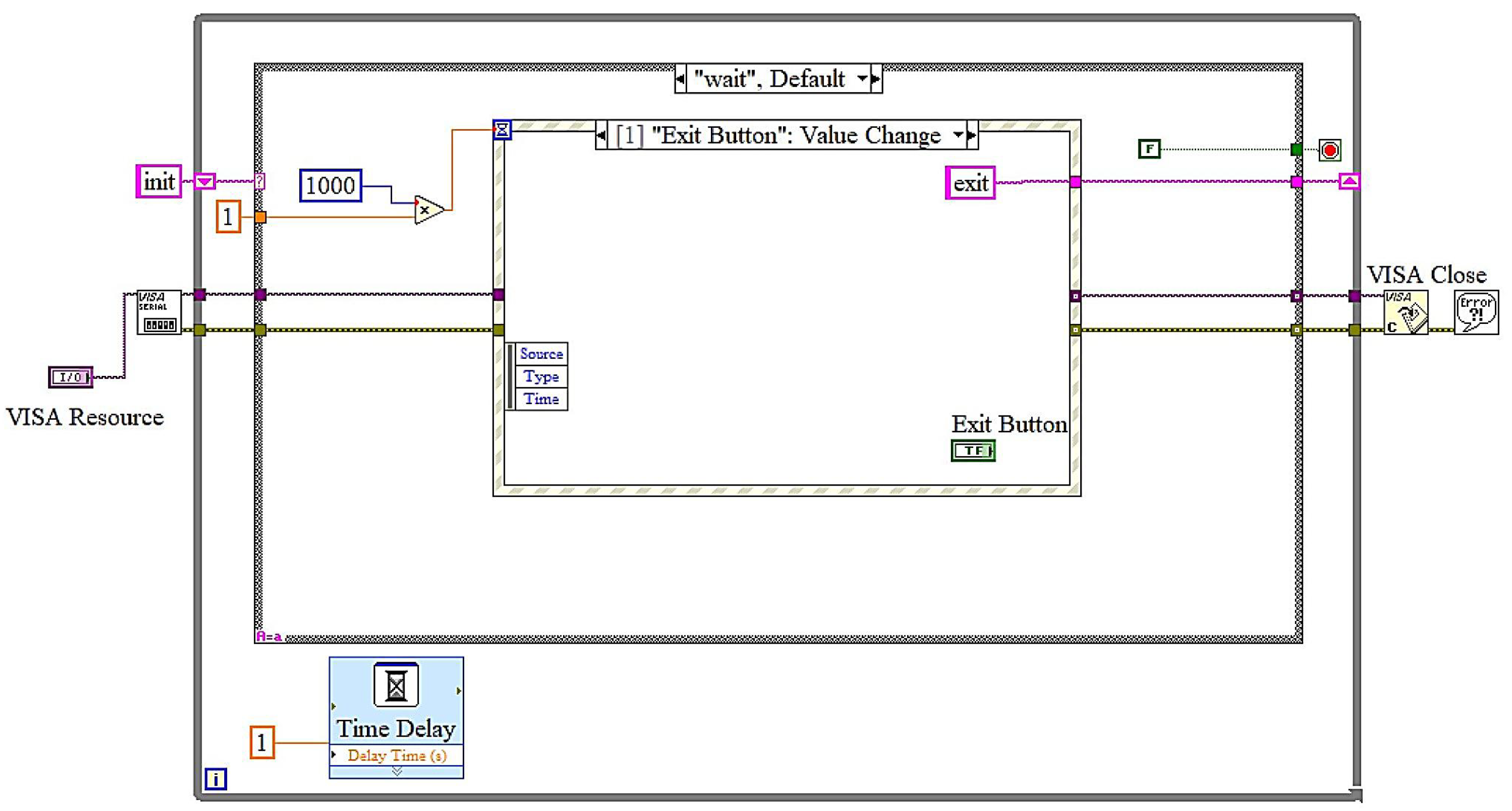
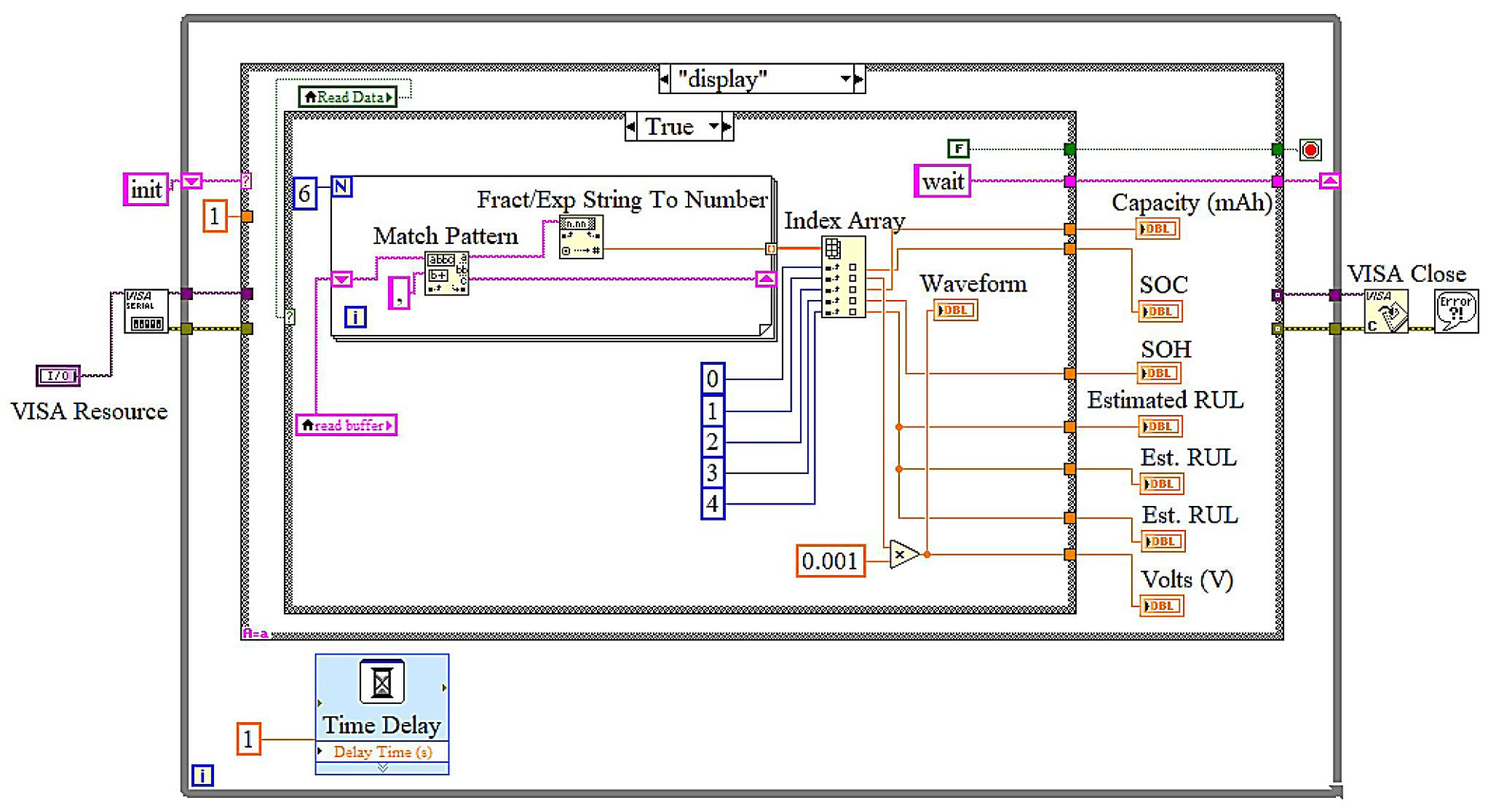
- Real-Time Monitoring: A LabVIEW application based on a state machine architecture is developed to visualize and monitor RUL predictions in real time.
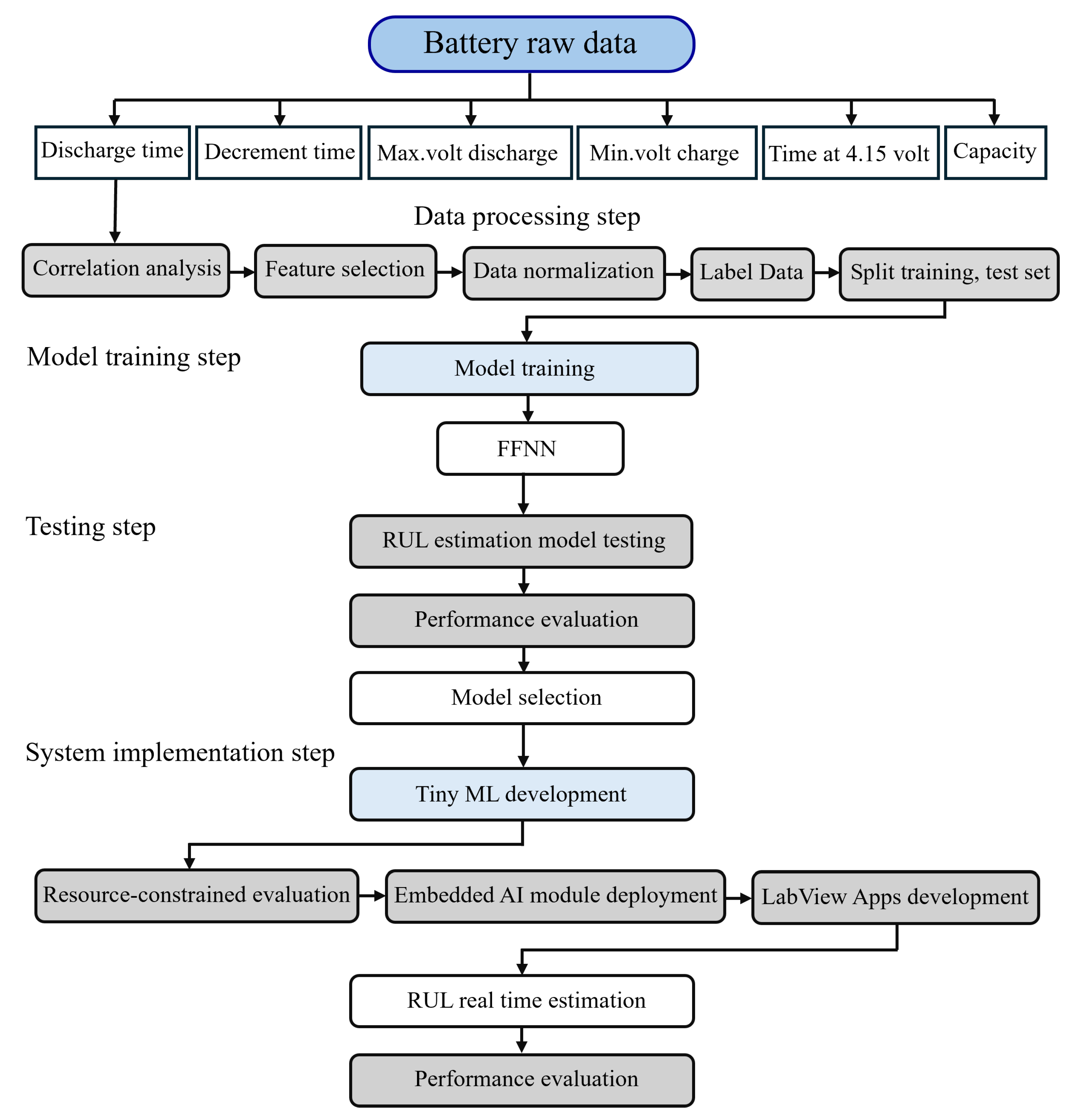
2. Materials and Methods
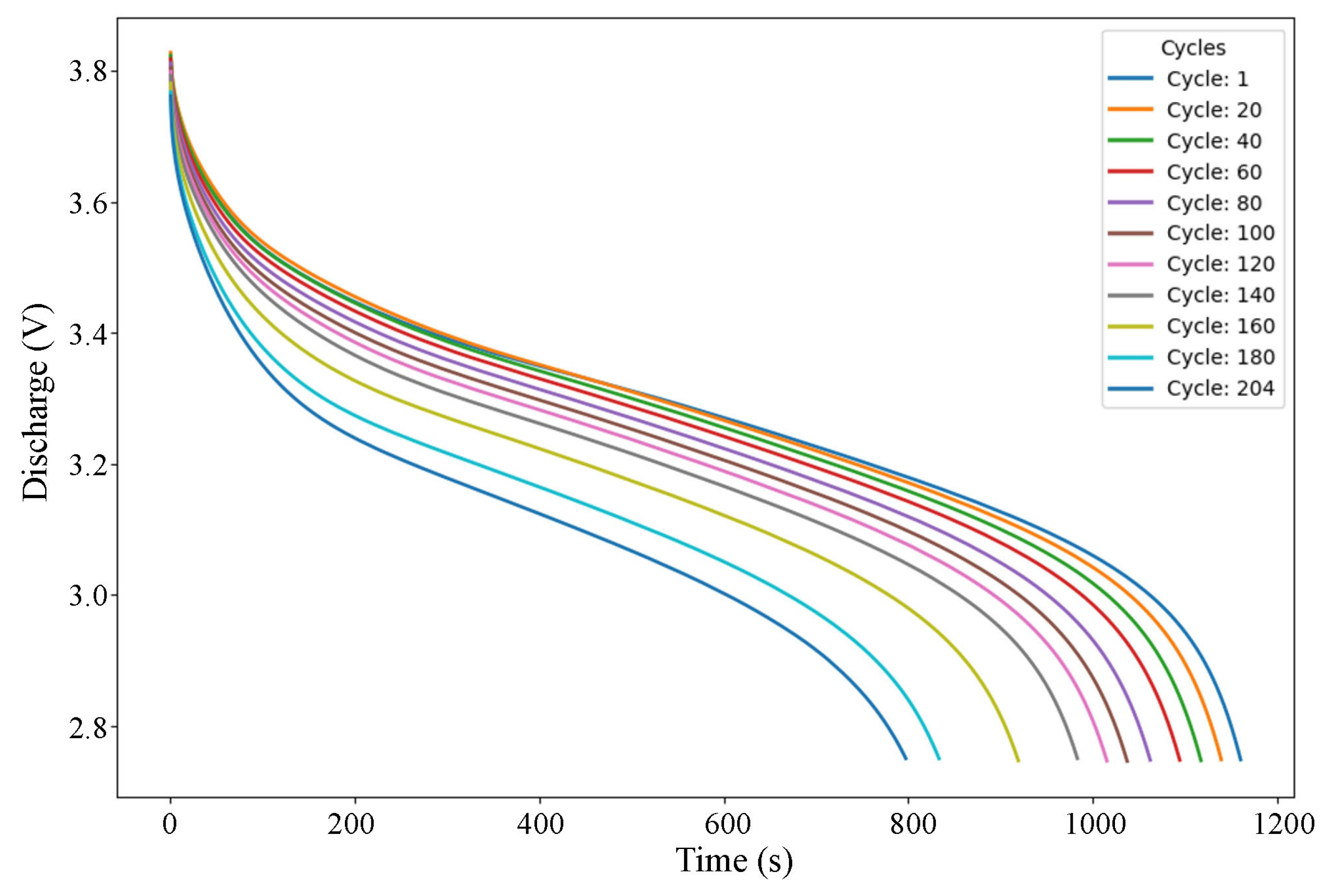
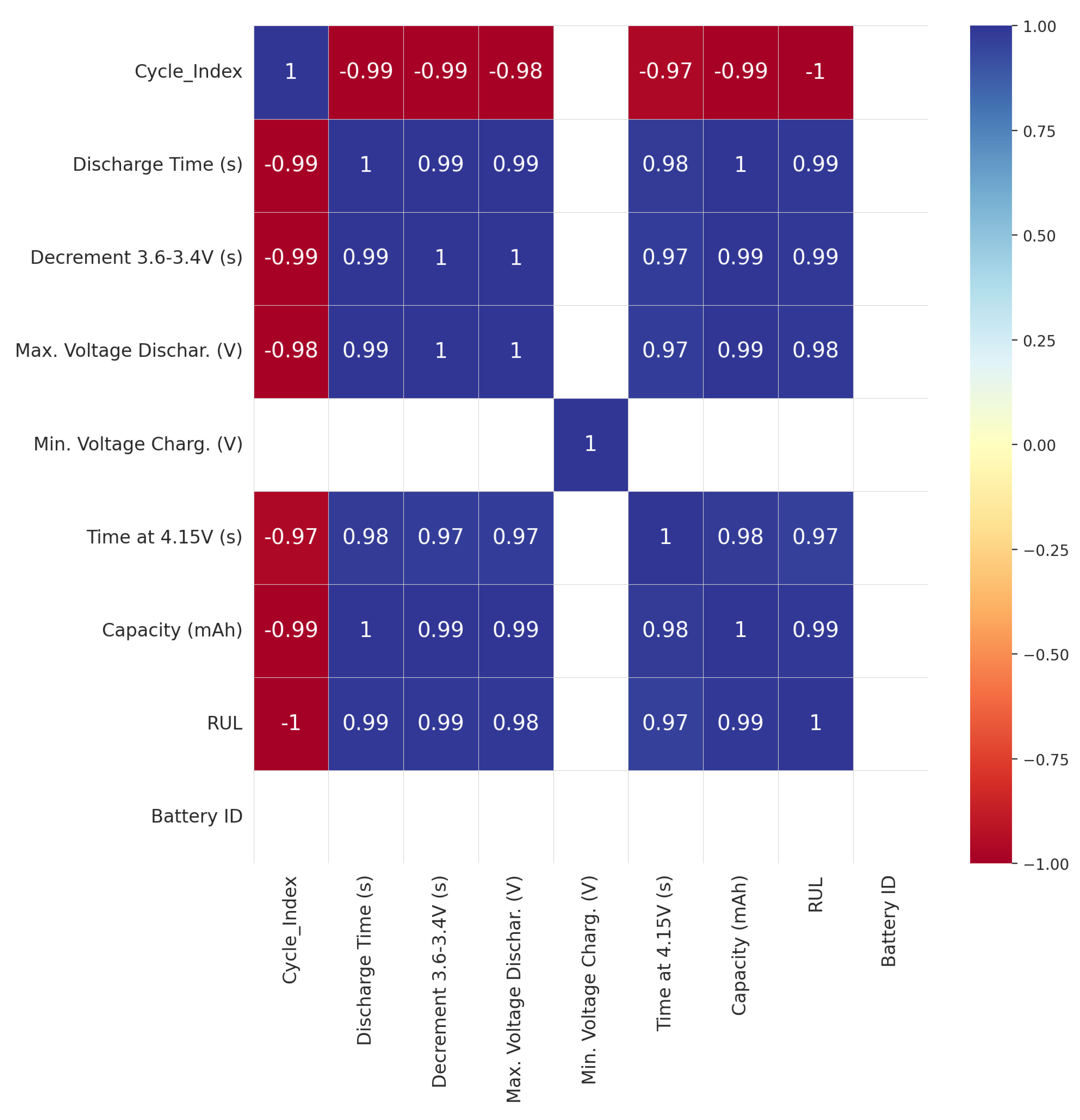
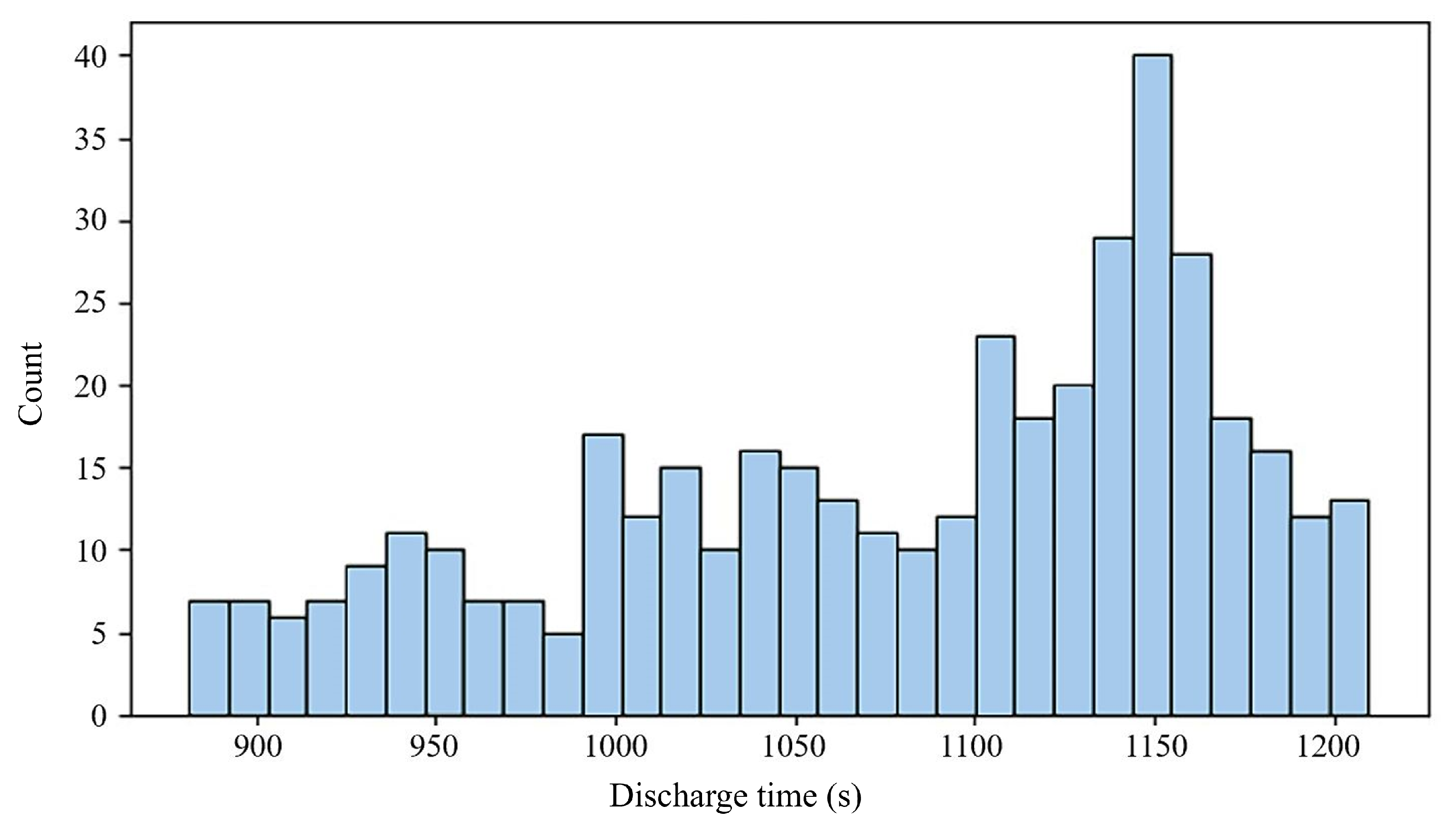
2.1. Data Acquisition
2.2. Feedforward Neural Network (FFNN)
2.3. TinyML On-Device Neural Network Training
2.4. Model Performance Evaluation
- Root Mean Squared Error: Assesses the average deviation between the predicted values and the actual values of RUL. A lower RMSE indicates higher prediction accuracy.
- Mean Absolute Error: Indicates the average absolute discrepancy between the predicted and actual remaining useful life values. A reduced MAE indicates superior predictive performance.
- R-squared: An elevated value indicates a superior alignment of the model with the data.
3. Embedded AI Sensor for Real-Time RUL Estimation of UAV Batteries
3.1. Hardware Deployment
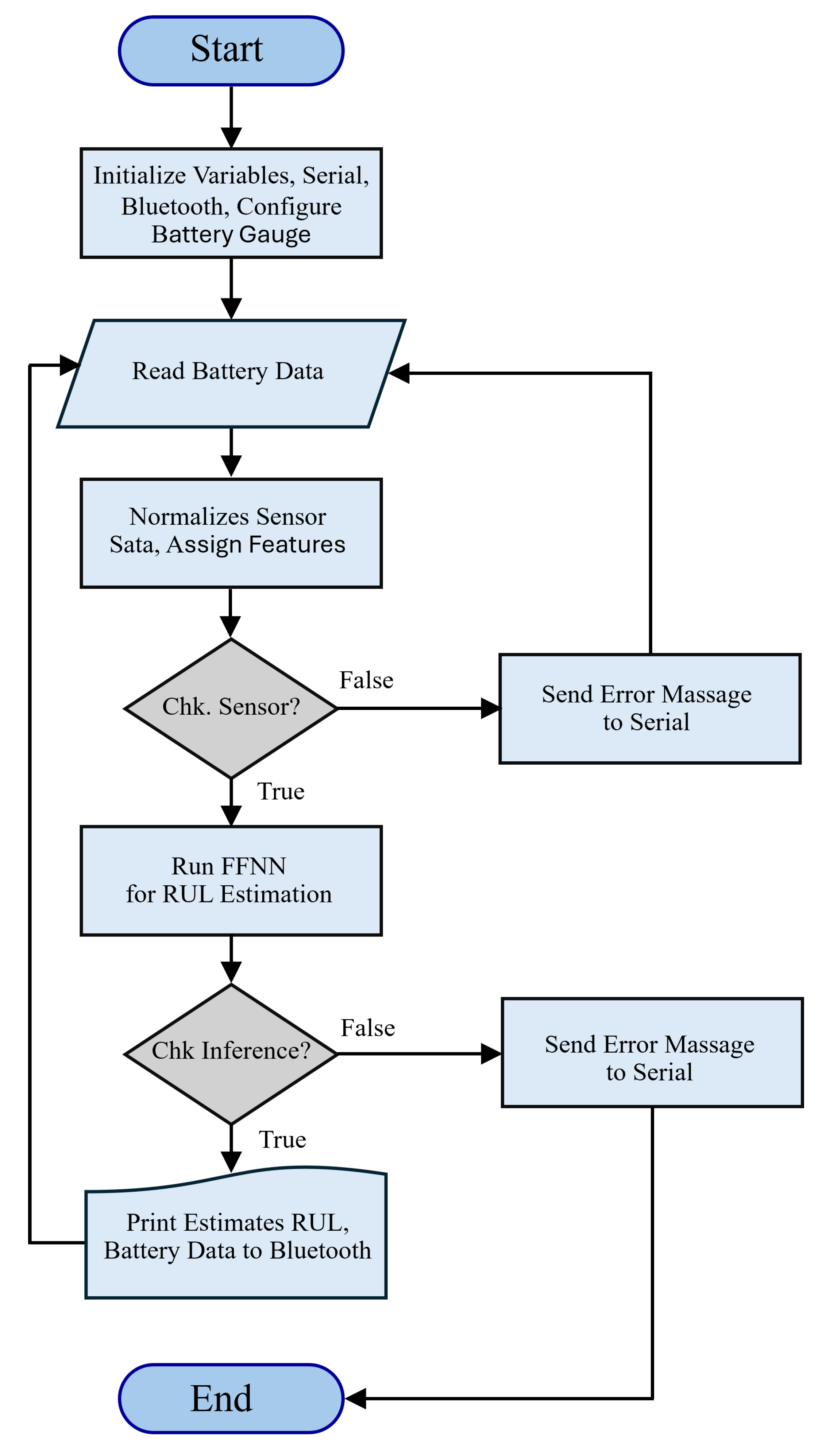
3.2. Software Development
4. Results and Discussion
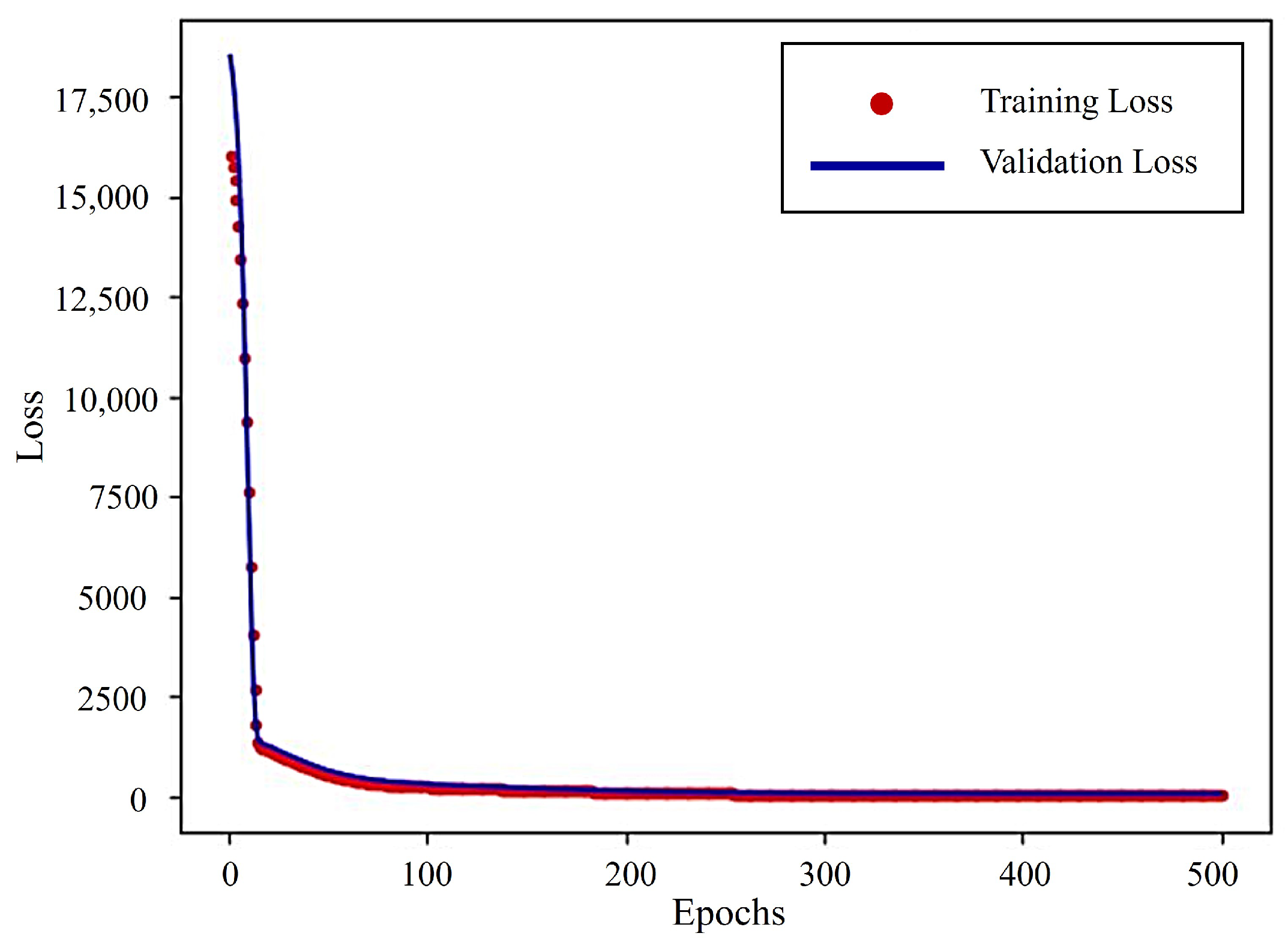
4.1. Model Training and Testing Results
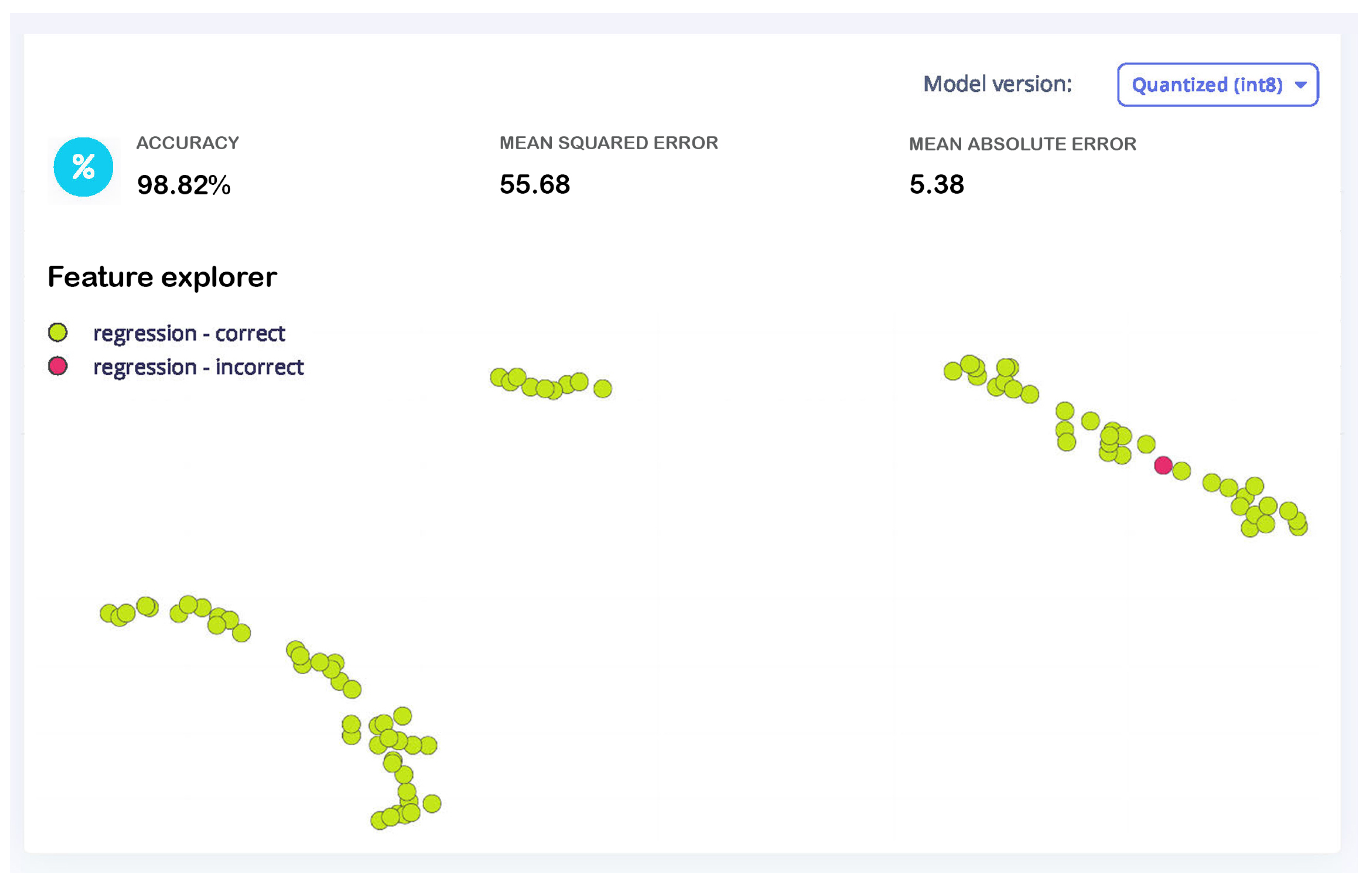
4.2. TinyML FFNN Neural Network Optimized Model Training and Testing Results
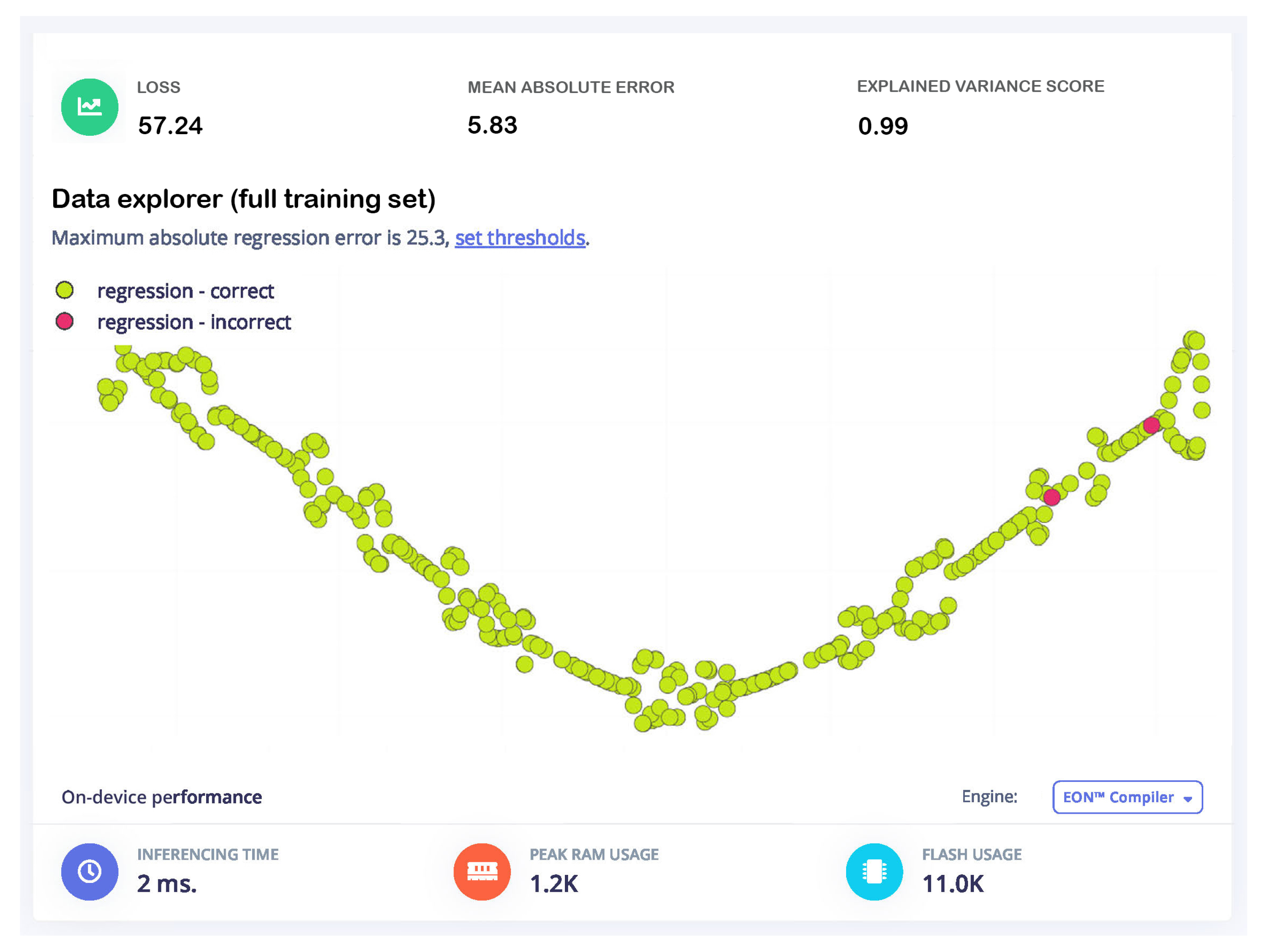
4.2.1. FFNN Neural Network Model Optimization
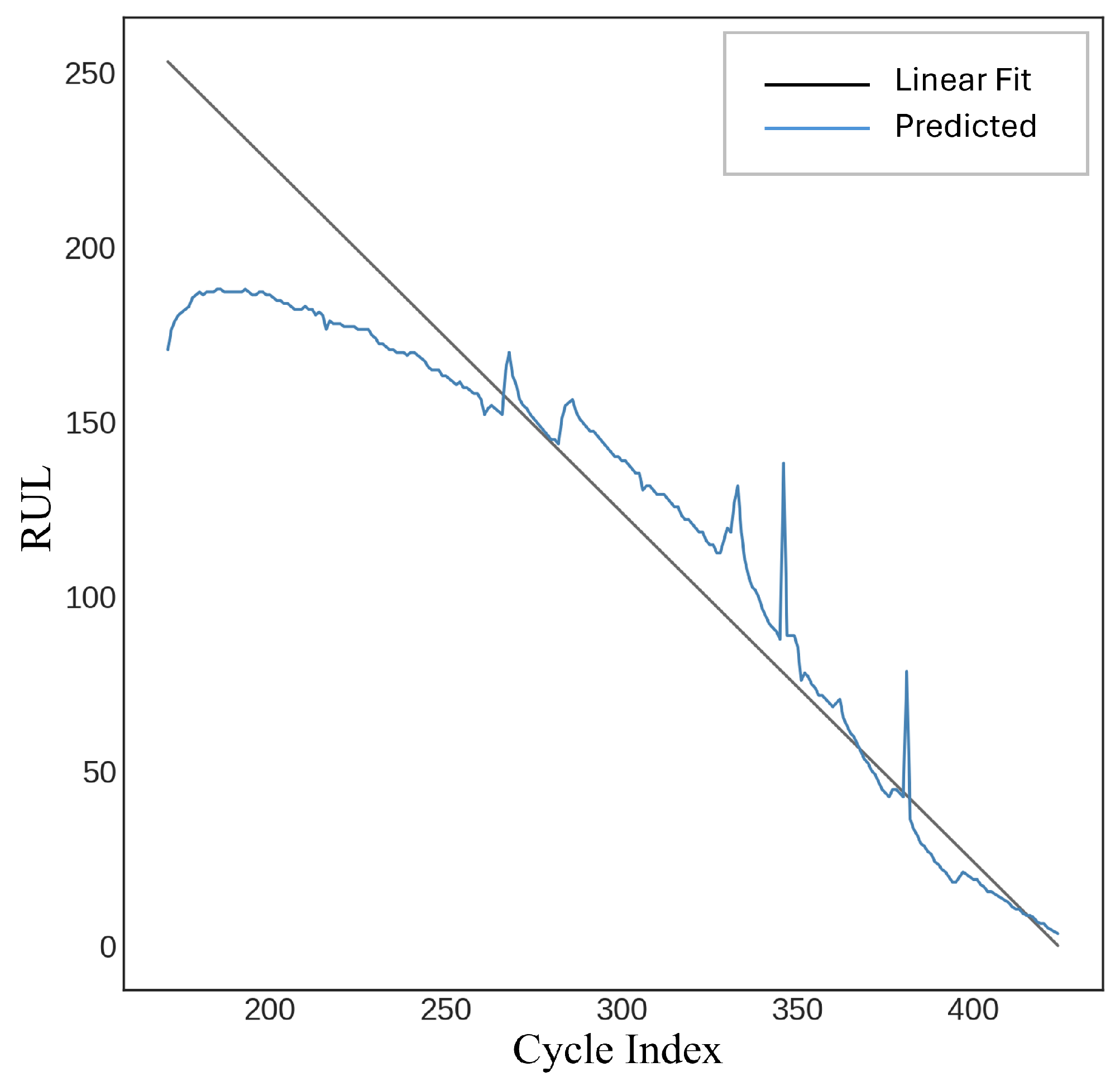
4.2.2. FFNN Neural Network Testing Results
4.3. Embedded AI Sensor for Real-Time RUL Estimation Results
4.4. Performance Comparison with Related Work
4.5. Challenges and Potential Improvements
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| CNNs | Convolutional Neural Networks |
| DCNNs | Deep Convolutional Neural Networks |
| DNNs | Deep Neural Networks |
| EON™ | Energy-Efficient On-Device Inference Compiler |
| EV | Electric Vehicle |
| FDA | Functional Data Analysis |
| FFNN | Feedforward Neural Network |
| GUI | Graphical User Interface |
| IoT | Internet of Things |
| KNN | K-Nearest Neighbor |
| LiPo | Lithium-Polymer Battery |
| LTCNs | Lightweight Temporal Convolutional Networks |
| LSTM | Long Short-term Memory |
| NASA | National Aeronautics and Space Administration |
| MAE | Mean Absolute Error |
| MSE | Mean Squared Error |
| PF | Particle Filter |
| ReLU | Rectified Linear Unit |
| RMSE | Root Mean Squared Error |
| RUL | Remaining Useful Life |
| SOC | State of Charge |
| SOH | State of Health |
| UAV | Unmanned Aerial Vehicle |
| VISA | Virtual Instrument System Architecture |
References
- Sierra, G.; Orchard, M.; Goebel, K.; Kulkarni, C. Battery Health Management for Small-Size Rotary-Wing Electric Unmanned Aerial Vehicles: An Efficient Approach for Constrained Computing Platforms. Reliab. Eng. Syst. Saf. 2019, 182, 166–178. [Google Scholar] [CrossRef]
- Zhang, Z.; Si, X.; Hu, C.; Lei, Y. Degradation Data Analysis and Remaining Useful Life Estimation: A Review on Wiener-Process-Based Methods. Eur. J. Oper. Res. 2018, 271, 775–796. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Li, H.; Xiu, X.; Liu, W. A Data-Driven Modeling Method for Stochastic Nonlinear Degradation Process with Application to RUL Estimation. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 3847–3858. [Google Scholar] [CrossRef]
- Si, X.; Zhang, Z.; Hu, C. Data-Driven Remaining Useful Life Prognosis Techniques: Stochastic Models, Methods and Applications; Springer: Cham, Switzerland, 2017; pp. 3–21. [Google Scholar]
- Li, L.; Saldivar, A.A.F.; Bai, Y.; Li, Y. Battery Remaining Useful Life Prediction with Inheritance Particle Filtering. Energies 2019, 12, 2784. [Google Scholar] [CrossRef]
- Zhang, N.; Xu, A.; Wang, K.; Han, X.; Hong, W.; Hong, S.H. Remaining Useful Life Prediction of Lithium Batteries Based on Extended Kalman Particle Filter. IEEJ Trans. Electr. Electron. Eng. 2021, 16, 206–214. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, M.; Shu, X.; Xiao, R.; Shen, J. Online State of Health Estimation for Lithium-Ion Batteries Based on Support Vector Machine. Appl. Sci. 2018, 8, 925. [Google Scholar] [CrossRef]
- Li, X.; Ding, Q.; Sun, J. Remaining Useful Life Estimation in Prognostics Using Deep Convolution Neural Networks. Reliab. Eng. Syst. Saf. 2018, 172, 1–11. [Google Scholar] [CrossRef]
- Li, H.; Zhao, W.; Zhang, Y.; Zio, E. Remaining Useful Life Prediction Using Multi-Scale Deep Convolutional Neural Network. Appl. Soft Comput. 2020, 89, 106113. [Google Scholar] [CrossRef]
- Wang, Q.; Zheng, S.; Farahat, A.; Serita, S.; Gupta, C. Remaining Useful Life Estimation Using Functional Data Analysis. In Proceedings of the 2019 IEEE International Conference on Prognostics and Health Management (ICPHM), San Francisco, CA, USA, 17–20 June 2019. [Google Scholar] [CrossRef]
- Ciani, L.; Garzon-Alfonso, C.; Grasso, F.; Patrizi, G. Early-Stage State-of-Health Prediction of Lithium Batteries for Wireless Sensor Networks Using LSTM and a Single Exponential Degradation Model. Sensors 2025, 25, 2275. [Google Scholar] [CrossRef]
- García, E.; Quiles, E.; Correcher, A. Distributed Intelligent Battery Management System Using a Real-World Cloud Computing System. Sensors 2023, 23, 3417. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, W.; Dillon, T.; Rahayu, W.; Li, M. Empowering IoT Predictive Maintenance Solutions with AI: A Distributed System for Manufacturing Plant-Wide Monitoring. IEEE Trans. Ind. Inform. 2022, 18, 1345–1354. [Google Scholar] [CrossRef]
- Shamshiri, A.R.; Ghaznavi-Ghoushchi, M.B.; Kariman, A.R. ML-Based Aging Monitoring and Lifetime Prediction of IoT Devices with Cost-Effective Embedded Tags for Edge and Cloud Operability. IEEE Internet Things J. 2022, 9, 7433–7445. [Google Scholar] [CrossRef]
- Pektaş, A.; Pektas, E. A Novel Scheme for Accurate Remaining Useful Life Prediction for Industrial IoTs by Using Deep Neural Network. Int. J. Artif. Intell. Appl. 2018, 9, 17–25. [Google Scholar] [CrossRef]
- Veeraraghavan, A.K.; Adithya, V.; Bhave, A.; Akella, S. Battery Aging Estimation with Deep Learning. In Proceedings of the 2017 IEEE Transportation Electrification Conference (ITEC-India), Pune, India, 13–15 December 2017. [Google Scholar] [CrossRef]
- Ren, L.; Liu, Y.; Wang, X.; Lü, J.; Deen, M.J. Cloud–Edge-Based Lightweight Temporal Convolutional Networks for Remaining Useful Life Prediction in IIoT. IEEE Internet Things J. 2021, 8, 12578–12587. [Google Scholar] [CrossRef]
- Galeotti, M.; Cinà, L.; Giammanco, C.; Di Carlo, A.; Santoni, F.; De Angelis, A.; Moschitta, A.; Carbone, P. LiPo Batteries Dataset: Capacity, Electrochemical Impedance Spectra, and Fit of Equivalent Circuit Model at Various States-of-Charge and States-of-Health. Data Brief 2023, 50, 109561. [Google Scholar] [CrossRef]
- Elmahallawy, M.; Elfouly, T.; Alouani, A.; Massoud, A.M. A Comprehensive Review of Lithium-Ion Batteries Modeling, and State of Health and Remaining Useful Lifetime Prediction. IEEE Access 2022, 10, 119040–119070. [Google Scholar] [CrossRef]
- Jafari, S.; Byun, Y.-C.; Ko, S. A Novel Approach for Predicting Remaining Useful Life and Capacity Fade in Lithium-Ion Batteries Using Hybrid Machine Learning. IEEE Access 2023, 11, 131950–131963. [Google Scholar] [CrossRef]
- Ren, L.; Zhao, L.; Hong, S.; Zhao, S.; Wang, H.; Zhang, L. Remaining Useful Life Prediction for Lithium-Ion Battery: A Deep Learning Approach. IEEE Access 2018, 6, 50587–50598. [Google Scholar] [CrossRef]
- Mahamad, A.K.; Saon, S.; Hiyama, T. Predicting Remaining Useful Life of Rotating Machinery Based on Artificial Neural Network. Comput. Math. Appl. 2010, 60, 1078–1087. [Google Scholar] [CrossRef]
- Ding, G.; Wang, W.; Zhu, T. Remaining Useful Life Prediction for Lithium-Ion Batteries Based on CS-VMD and GRU. IEEE Access 2022, 10, 89402–89413. [Google Scholar] [CrossRef]
- Warden, P.; Situnayake, D. Machine Learning with TensorFlow Lite on Arduino and Ultra-Low-Power Microcontrollers; O’Reilly Media: Sebastopol, CA, USA, 2019. [Google Scholar]
- Situnayake, D.; Plunkett, J. AI at the Edge: Solving Real-World Problems with Embedded Machine Learning; O’Reilly Media: Sebastopol, CA, USA, 2023. [Google Scholar]
- Fine, T.L. Feedforward Neural Network Methodology; Springer: New York, NY, USA, 1999. [Google Scholar]
- Blume, P. The LabVIEW Style Book; Pearson Education: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Bitter, R.; Mohiuddin, T.; Nawrocki, M. LabVIEW: Advanced Programming Techniques, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Das, K.; Kumar, R.; Krishna, A. Analyzing Electric Vehicle Battery Health Performance Using Supervised Machine Learning. Renew. Sustain. Energy Rev. 2024, 189 Pt A, 113967. [Google Scholar] [CrossRef]
- Li, Y.; Zou, C.F.; Berecibar, M.; Nanini, E.E.; Chan, J.C.W.; van den Bossche, P.; Van Mierlo, J.; Omar, N. Random Forest Regression for Online Capacity Estimation of Lithium-Ion Batteries. Appl. Energy 2018, 232, 197–210. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charge | Discharge | |
|---|---|---|
| Profile | CC–CV | CC |
| (Constant Current–Constant Voltage) | (Constant Current) | |
| Charge Current | 1.0 A | – |
| Voltage Threshold | 4.2 V (CV phase) | Cut-off Voltage 2.75 V |
| Discharge Current | – | 3.0 A |
| Temperature | 25 °C | 25 °C |
| Count | Mean | Std. | Min. | 25% | 50% | 75% | Max. | |
|---|---|---|---|---|---|---|---|---|
| Discharge Time (s) | 424 | 1078.29 | 86.84 | 881.33 | 1013.34 | 1102.11 | 1148.43 | 1029.43 |
| Decrement 3.6–3.4V (s) | 424 | 199.77 | 57.31 | 83.99 | 147.99 | 210.0 | 238.99 | 281.0 |
| Maximum Voltage Discharge (V) | 424 | 3.82 | 0.02 | 3.77 | 3.80 | 3.82 | 3.84 | 3.85 |
| Minimum Voltage Charge (V) | 424 | 3.44 | 0.07 | 3.07 | 3.41 | 3.44 | 3.48 | 3.52 |
| Time at 4.15V (s) | 424 | 2370.30 | 333.15 | 3.38 | 2127.11 | 2454.43 | 2623.67 | 2947.42 |
| Capacity (mAh) | 424 | 898.27 | 72.36 | 734.07 | 844.06 | 918.0 | 956.59 | 1007.44 |
| RUL | 424 | 109.66 | 67.97 | 0 | 52.75 | 105.5 | 158.25 | 253.0 |
| Model | Neural Network Architecture | Loss (MSE) | MAE | Variance | Latency | Peak RAM | Flash Usage |
|---|---|---|---|---|---|---|---|
| Model 1 | Dense(20)–Dense(10)–Output(1) | 57.24 | 5.83 | 0.99 | 2 ms | 1.2 kB | 11.0 kB |
| Model 2 | Dense(40)–Dense(20)–Dropout(0.5)– Output(1) | 57.59 | 5.77 | 0.99 | 2 ms | 1.2 kB | 11.8 kB |
| Model 3 | Dense(20)–Dense(10)–Dense(5)– Dropout(0.25)–Output(1) | 14,218 | 98.36 | 0.00 | 6 ms | 1.4 kB | 11.3 kB |
| Model 4 | Dense(20)–Dense(10)–Dropout(0.25)– Output(1) | 70.00 | 6.73 | 0.99 | 2 ms | 1.2 kB | 11.1 kB |
| Model 5 | Dense(40)–Dense(20)–Dropout(0.5) –Output(1) | 57.59 | 5.77 | 0.99 | 2 ms | 1.2 kB | 11.8 kB |
| Quantized (int8) | Unoptimized (float32) | |
|---|---|---|
| Latency | 2.0 ms | 10.0 ms |
| RAM | 1.2 K | 1.2 K |
| Flash | 11.0 K | 10.7 K |
| Accuracy | 98.82% | 98.82% |
| Batt. No. | Test No. | Estimated RUL | Actual RUL | SOH (%) | SOC (%) | Volts (V) |
|---|---|---|---|---|---|---|
| 1 | 1 | 231.7 | 231 | 94 | 0 | 2.722 |
| 1 | 2 | 228.86 | 230 | 94 | 0 | 2.720 |
| 1 | 3 | 226.96 | 229 | 94 | 0 | 2.728 |
| 1 | 4 | 226.01 | 228 | 94 | 0 | 2.721 |
| 1 | 5 | 225.06 | 227 | 94 | 0 | 2.725 |
| 1 | 6 | 223.16 | 226 | 94 | 0 | 2.727 |
| 1 | 7 | 220.31 | 225 | 94 | 0 | 2.723 |
| 1 | 8 | 217.46 | 224 | 94 | 0 | 2.720 |
| 1 | 9 | 216.51 | 223 | 93 | 0 | 2.726 |
| 1 | 10 | 214.61 | 222 | 93 | 0 | 2.733 |
| 2 | 1 | 78.82 | 74 | 83 | 0 | 2.775 |
| 2 | 2 | 77.52 | 73 | 83 | 0 | 2.766 |
| 2 | 3 | 75.97 | 72 | 83 | 0 | 2.732 |
| 2 | 4 | 74.07 | 71 | 83 | 0 | 2.745 |
| 2 | 5 | 73.12 | 70 | 83 | 0 | 2.748 |
| 2 | 6 | 72.17 | 69 | 83 | 0 | 2.721 |
| 2 | 7 | 71.22 | 68 | 83 | 0 | 2.719 |
| 2 | 8 | 70.27 | 67 | 82 | 0 | 2.778 |
| 2 | 9 | 69.32 | 66 | 82 | 0 | 2.793 |
| 2 | 10 | 68.37 | 65 | 82 | 0 | 2.765 |
| 2 | 11 | 54.13 | 57 | 81 | 0 | 2.760 |
| 2 | 12 | 53.18 | 56 | 81 | 0 | 2.788 |
| 2 | 13 | 52.23 | 55 | 80 | 0 | 2.751 |
| 2 | 14 | 51.28 | 54 | 80 | 0 | 2.723 |
| 2 | 15 | 50.33 | 53 | 80 | 0 | 2.773 |
| 2 | 16 | 49.38 | 52 | 80 | 0 | 2.798 |
| 2 | 17 | 47.48 | 51 | 80 | 0 | 2.739 |
| 2 | 18 | 45.57 | 50 | 80 | 0 | 2.758 |
| 2 | 19 | 44.63 | 49 | 79 | 0 | 2.734 |
| 2 | 20 | 51.28 | 48 | 79 | 0 | 2.747 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaoraingern, J.; Numsomran, A. Embedded Sensor Data Fusion and TinyML for Real-Time Remaining Useful Life Estimation of UAV Li Polymer Batteries. Sensors 2025, 25, 3810. https://doi.org/10.3390/s25123810
Chaoraingern J, Numsomran A. Embedded Sensor Data Fusion and TinyML for Real-Time Remaining Useful Life Estimation of UAV Li Polymer Batteries. Sensors. 2025; 25(12):3810. https://doi.org/10.3390/s25123810
Chicago/Turabian StyleChaoraingern, Jutarut, and Arjin Numsomran. 2025. "Embedded Sensor Data Fusion and TinyML for Real-Time Remaining Useful Life Estimation of UAV Li Polymer Batteries" Sensors 25, no. 12: 3810. https://doi.org/10.3390/s25123810
APA StyleChaoraingern, J., & Numsomran, A. (2025). Embedded Sensor Data Fusion and TinyML for Real-Time Remaining Useful Life Estimation of UAV Li Polymer Batteries. Sensors, 25(12), 3810. https://doi.org/10.3390/s25123810