
Wearable Fall Detection System with Real-Time Localization and Notification Capabilities


Abstract
1. Introduction
- A low-complexity FSM-based algorithm is implemented on a microcontroller without relying on any external computing resources.
- The FSM employs a staged decision-making process, similar to a cascade classifier. If any stage fails to meet the defined criteria, the possibility of a fall is immediately excluded, thus avoiding subsequent evaluations and reducing computational load and power consumption.
- The fall detection module integrates both GPS and NB-IoT communication, enabling real-time location tracking and notification at the moment of a fall.
- Real-time notification is supported through integration with instant messaging applications. The system also incorporates the Google Maps API to relay the incident location to family members or designated emergency contacts, thereby improving outdoor safety for elderly users.
- The system achieves low-power operation. Even with all features, i.e., GPS and NB-IoT, continuously active, the battery retains at least 64% of its capacity after 10 h of use, ensuring full-day operational reliability for outdoor activities. When the SIM7000G module is configured in Normal Idle mode, i.e., with GNSS disabled (wake-up on demand) and NB-IoT in the RRC Idle state, the average current consumption of the module is approximately 20 mA. Based on our endurance tests, with the selected 2000 mAh lithium-ion battery, the system can operate for up to 4.2 days. Furthermore, if the MCU is also set to low-power mode and the IMU’s “Wake-on-Shake” function is used to trigger wake-ups, the estimated operational time can be extended to approximately 16.7 days.
2. Proposed System Architecture
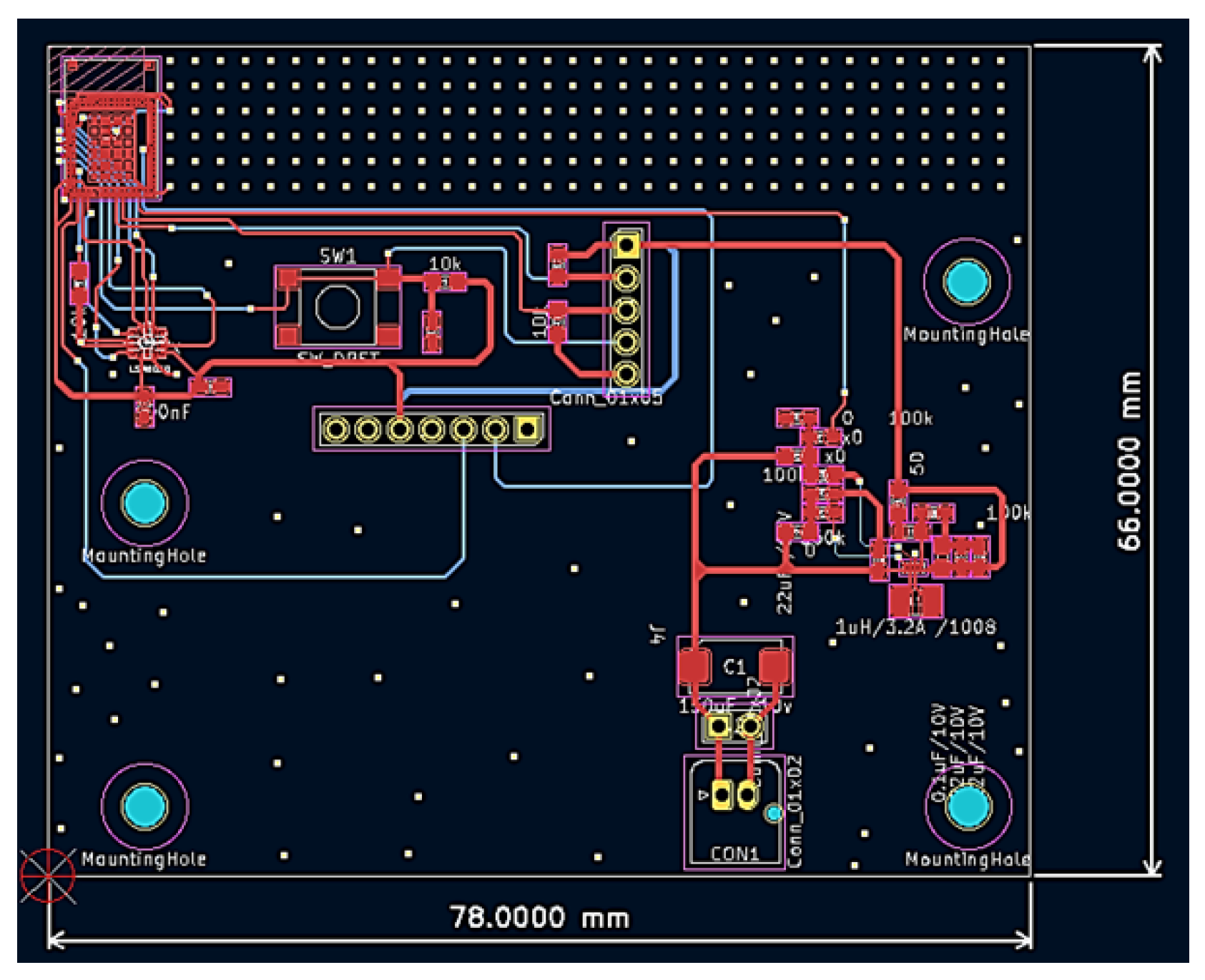
2.1. Proposed Wearable Module
2.1.1. Processing Unit: STM32WB5MMG
2.1.2. Six-Axis Inertial Measurement Unit
- Acceleration range: ±2 g/±4 g/±8 g/±16 g
- Angular velocity range: ±125 dps/±250 dps/±500 dps/±1000 dps/±2000 dps
- Package size: 2.5 × 3 × 0.83 mm
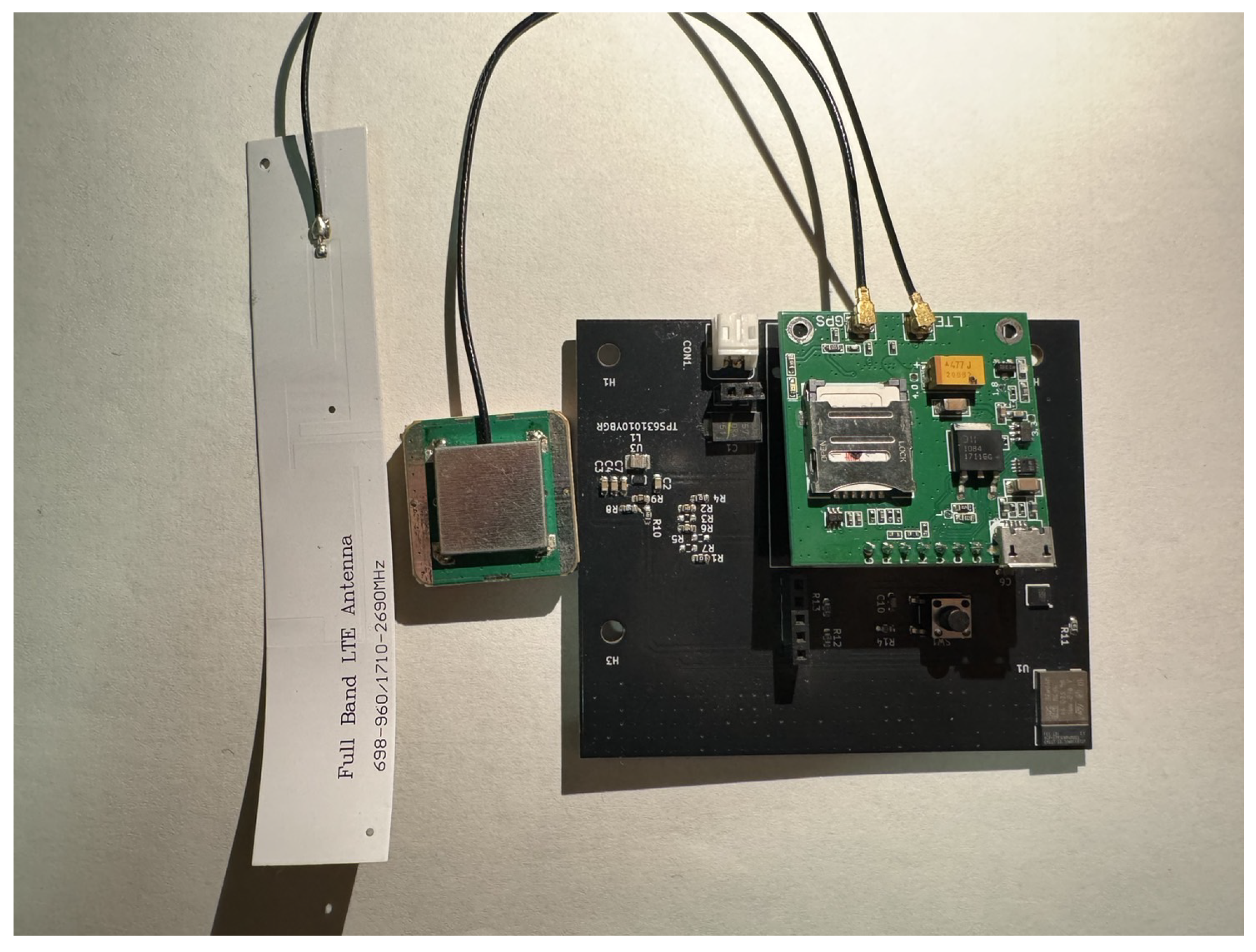
2.1.3. The SIM7000G Module
2.2. Cloud Server
2.2.1. ASP.NET Core API
2.2.2. LINE API
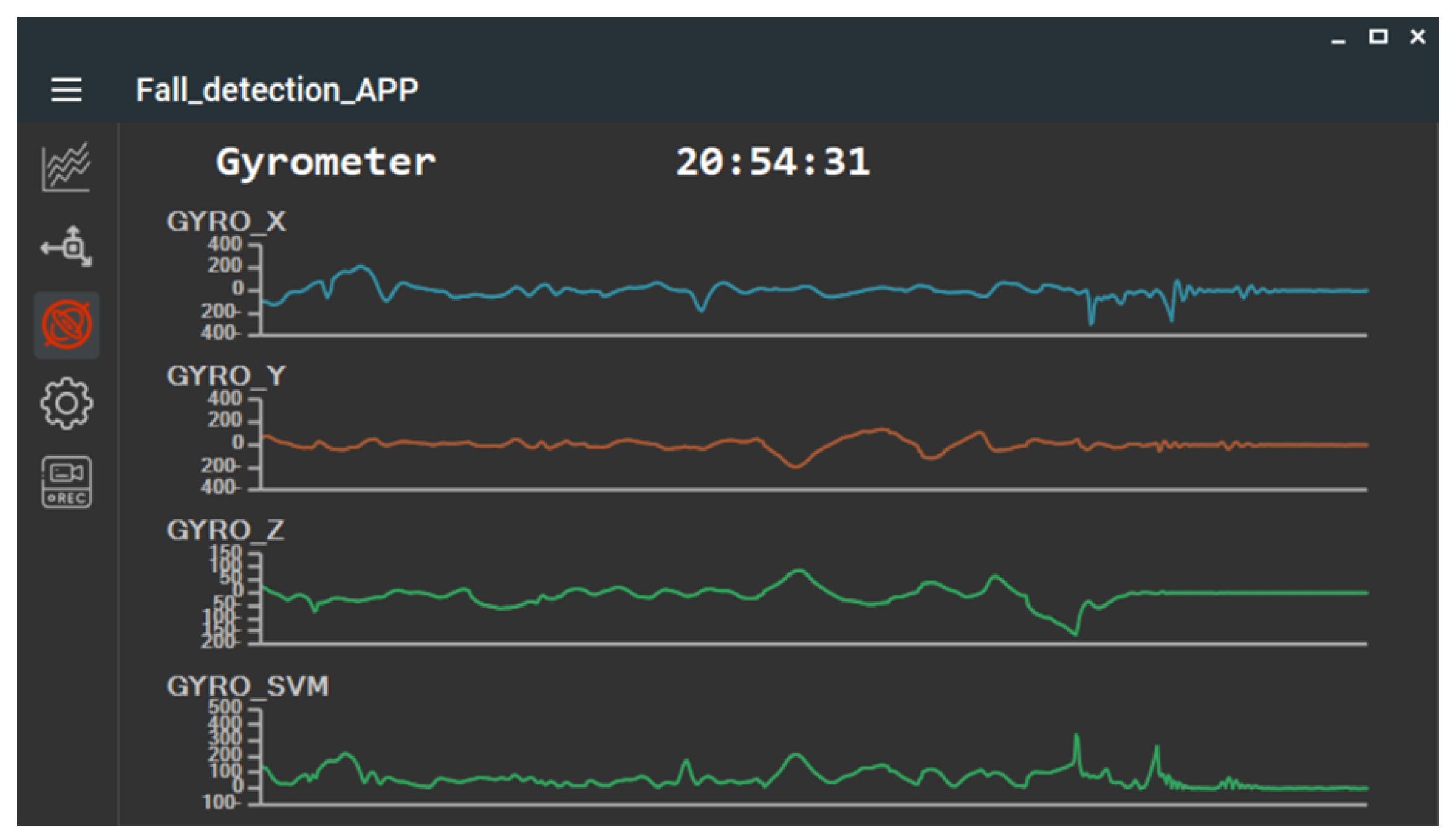
2.3. Offline Analysis APP
3. Signal Acquisition and Analysis
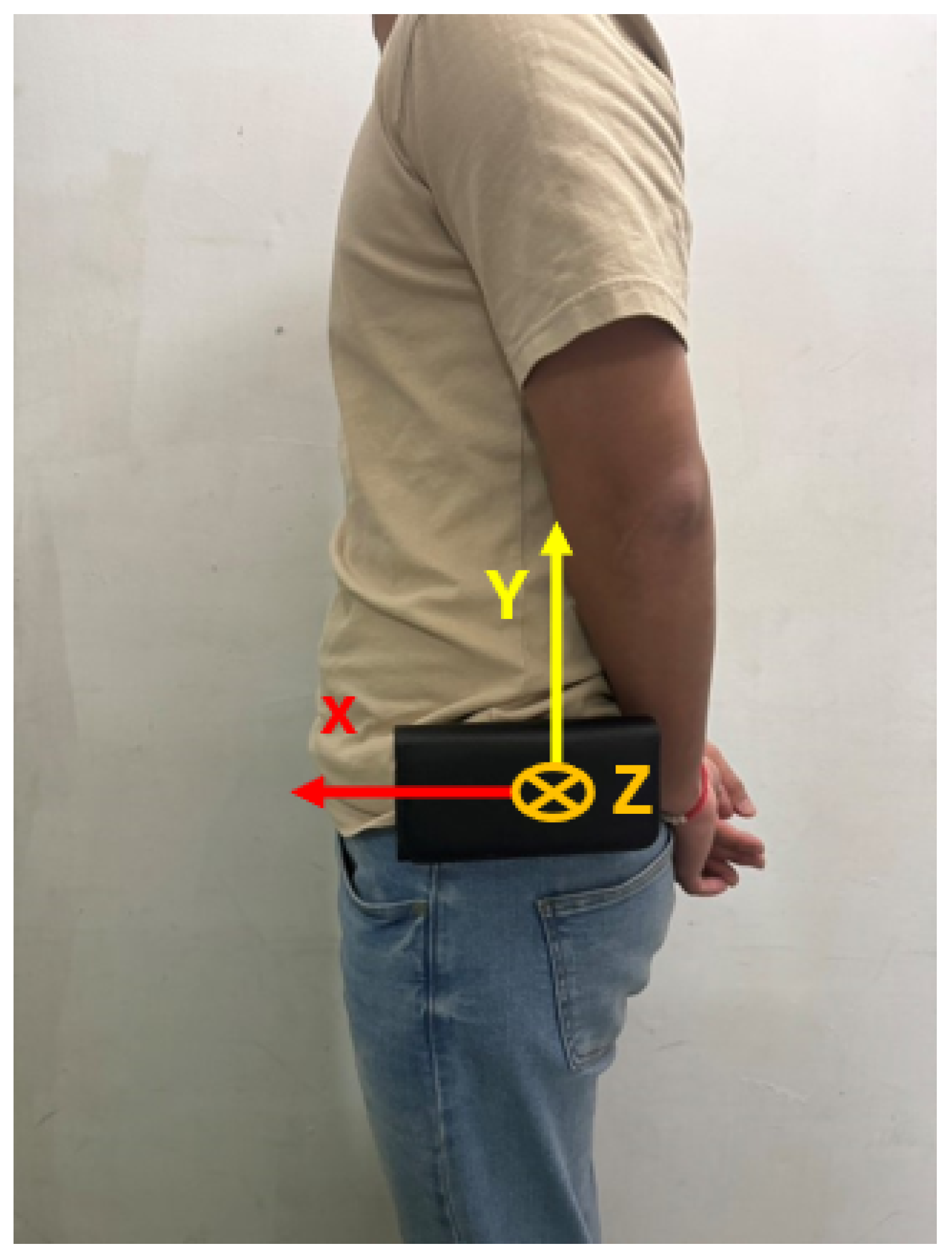
3.1. Sensor Placement
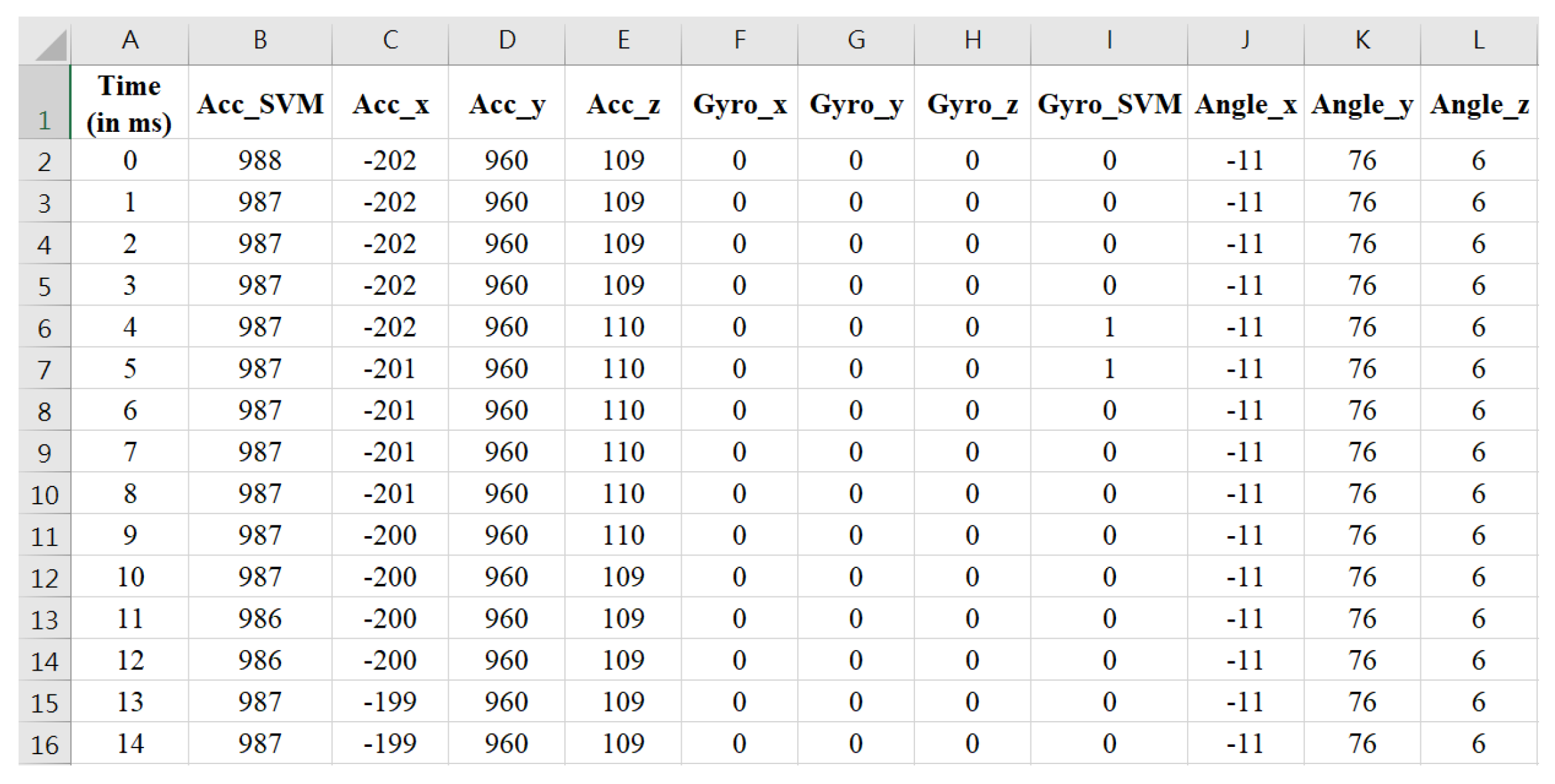
3.2. Signal Acquisition
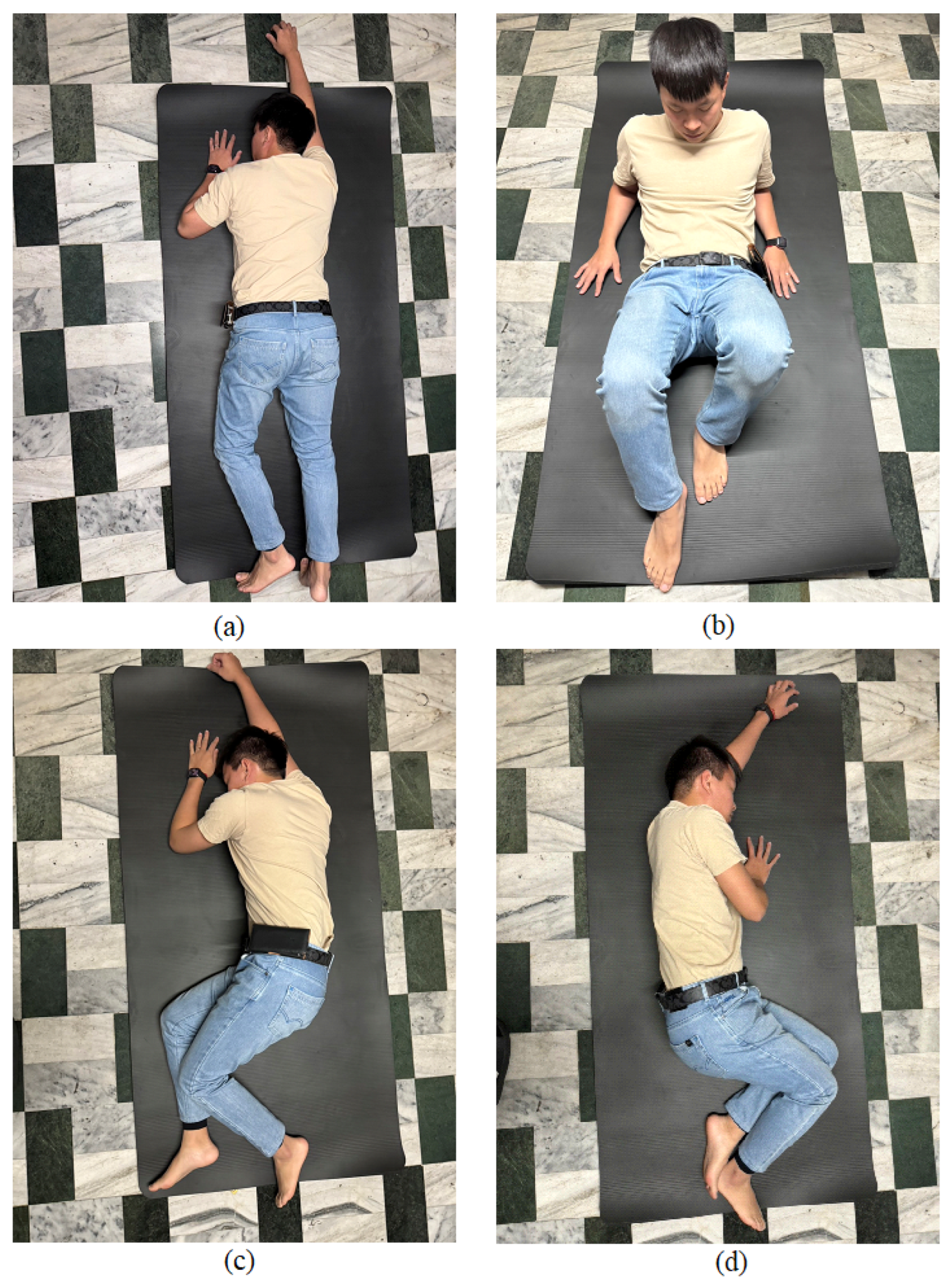
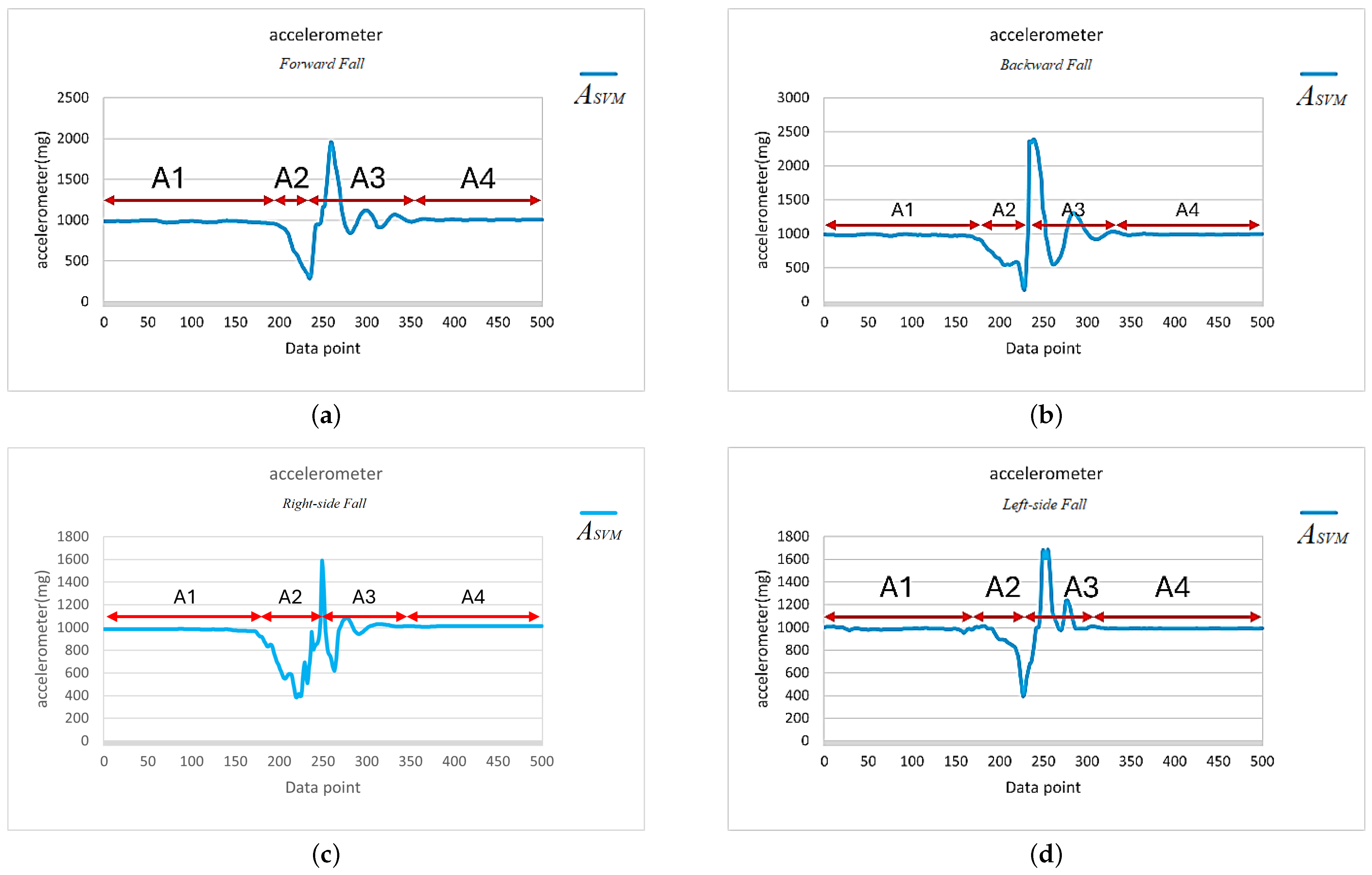
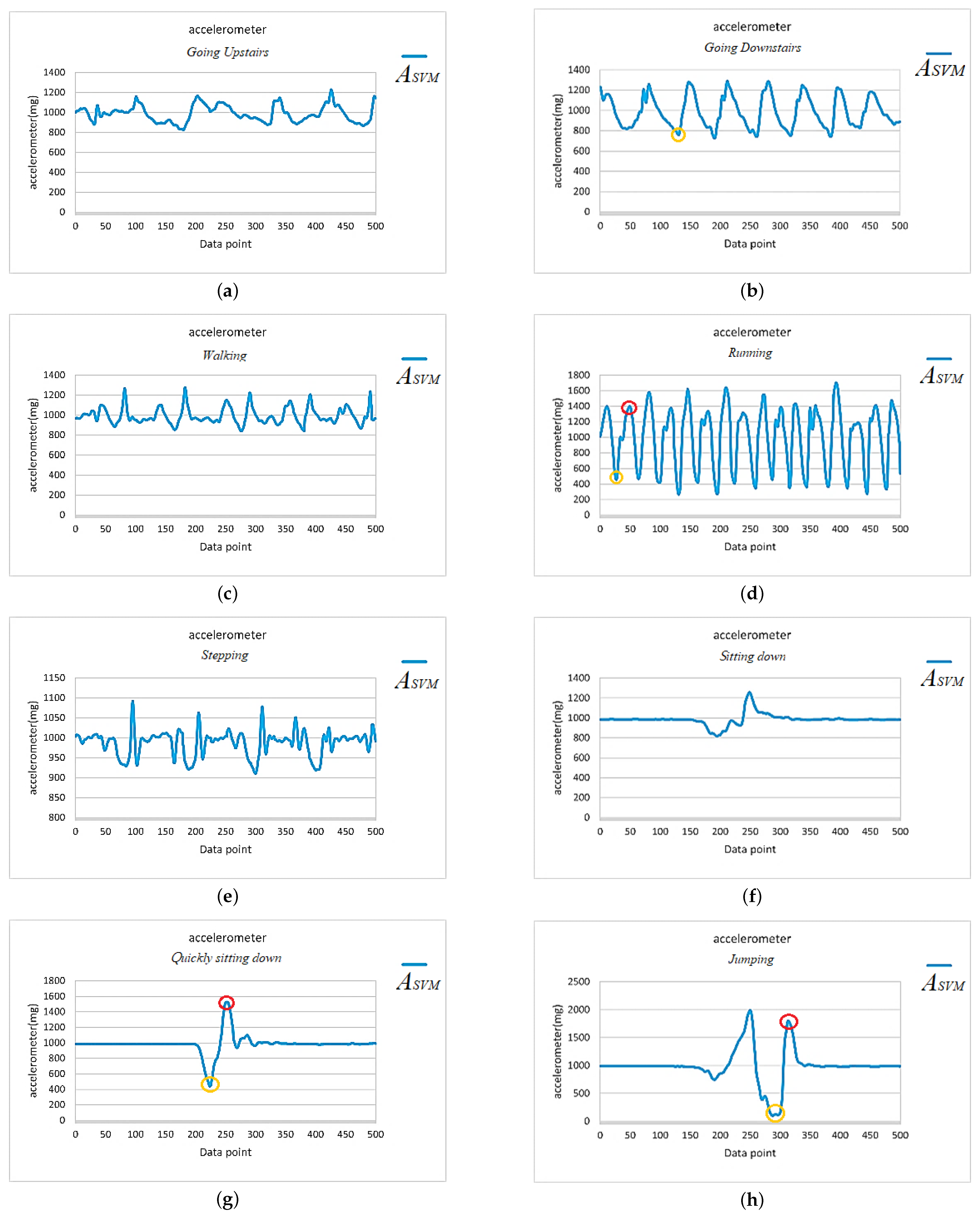
3.3. Fall and Daily Activity Patterns
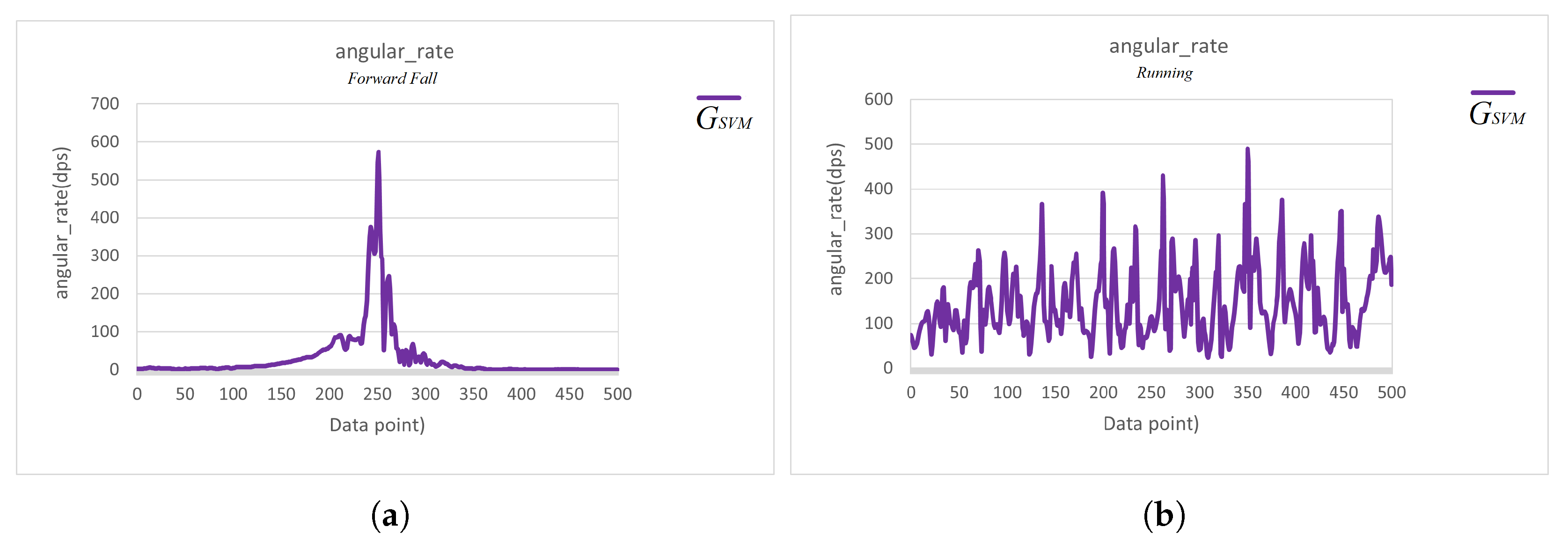
- Continuous activity types: including running, walking, stepping, going upstairs, and going downstairs.
- Single action types: including jumping, sitting down, quickly sitting down, and falls in the forward, right-side, left-side, and backward directions.
3.4. Observations
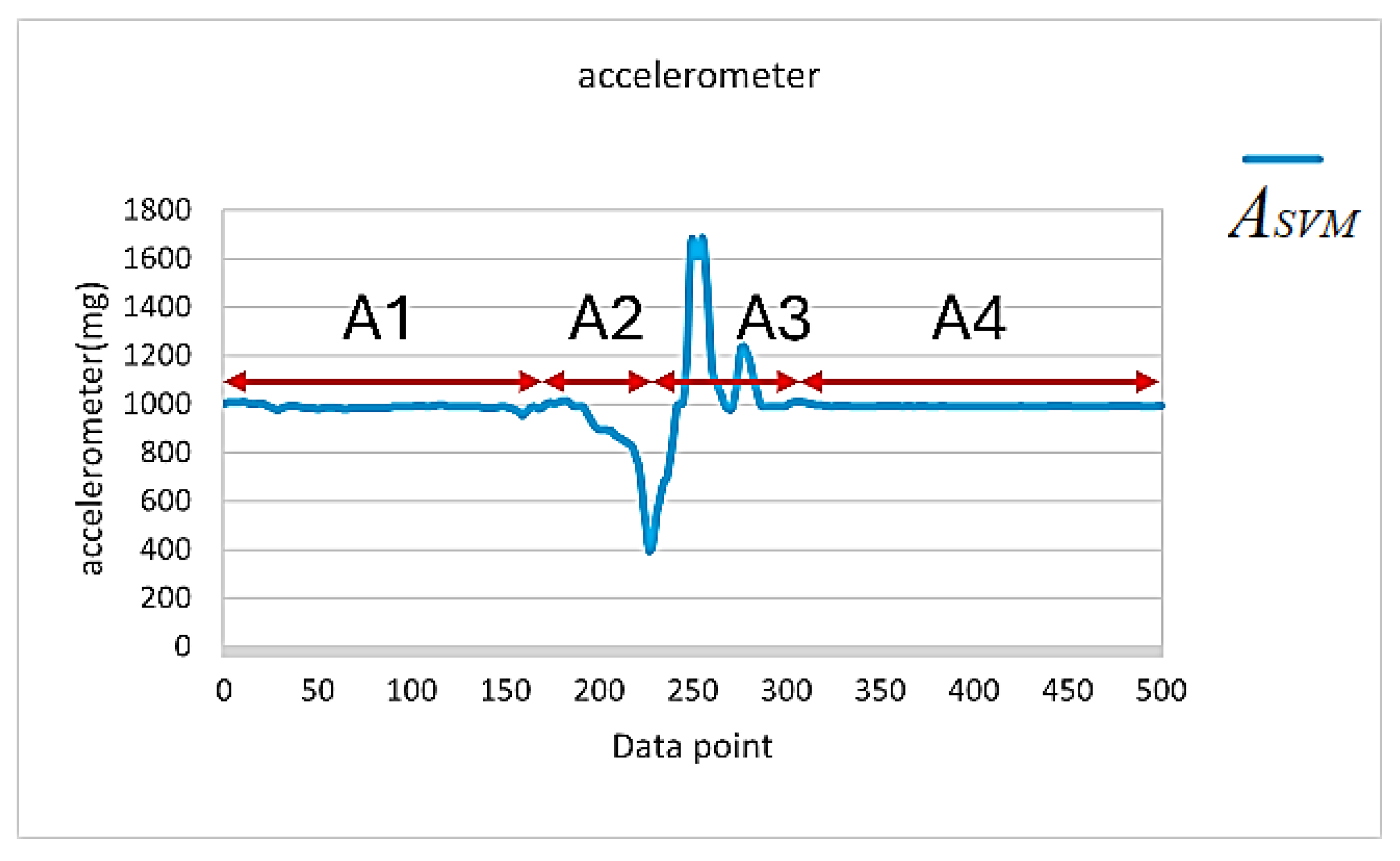
- Static standing (Stage A1): The signal vector magnitude of the accelerometer showed minimal variation, displaying a flat and stable curve with no significant motion occurring.
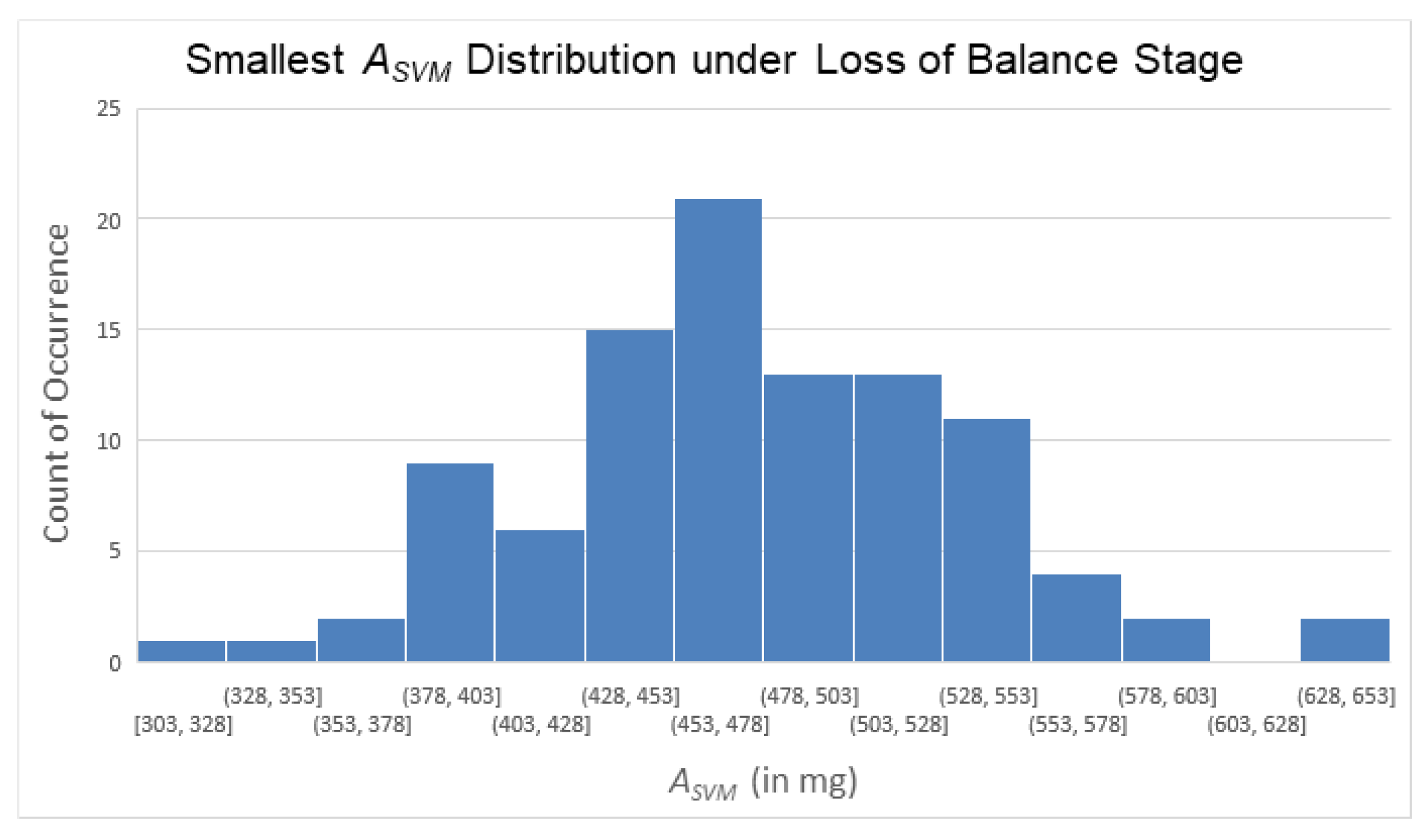
- Loss of balance (Stage A2): When a fall occurred, the human torso experienced an unbalanced state, causing fluctuations in the signal vector magnitude. When the subject was unable to regain balance and began to fall, they entered a brief period of weightlessness. During this time, the accelerometer’s signal vector magnitude dropped below 1 G and continued to decrease. Based on experimental observations and statistics, during a fall event, the signal vector magnitude of the accelerometer will drop below 0.8 G during this stage.
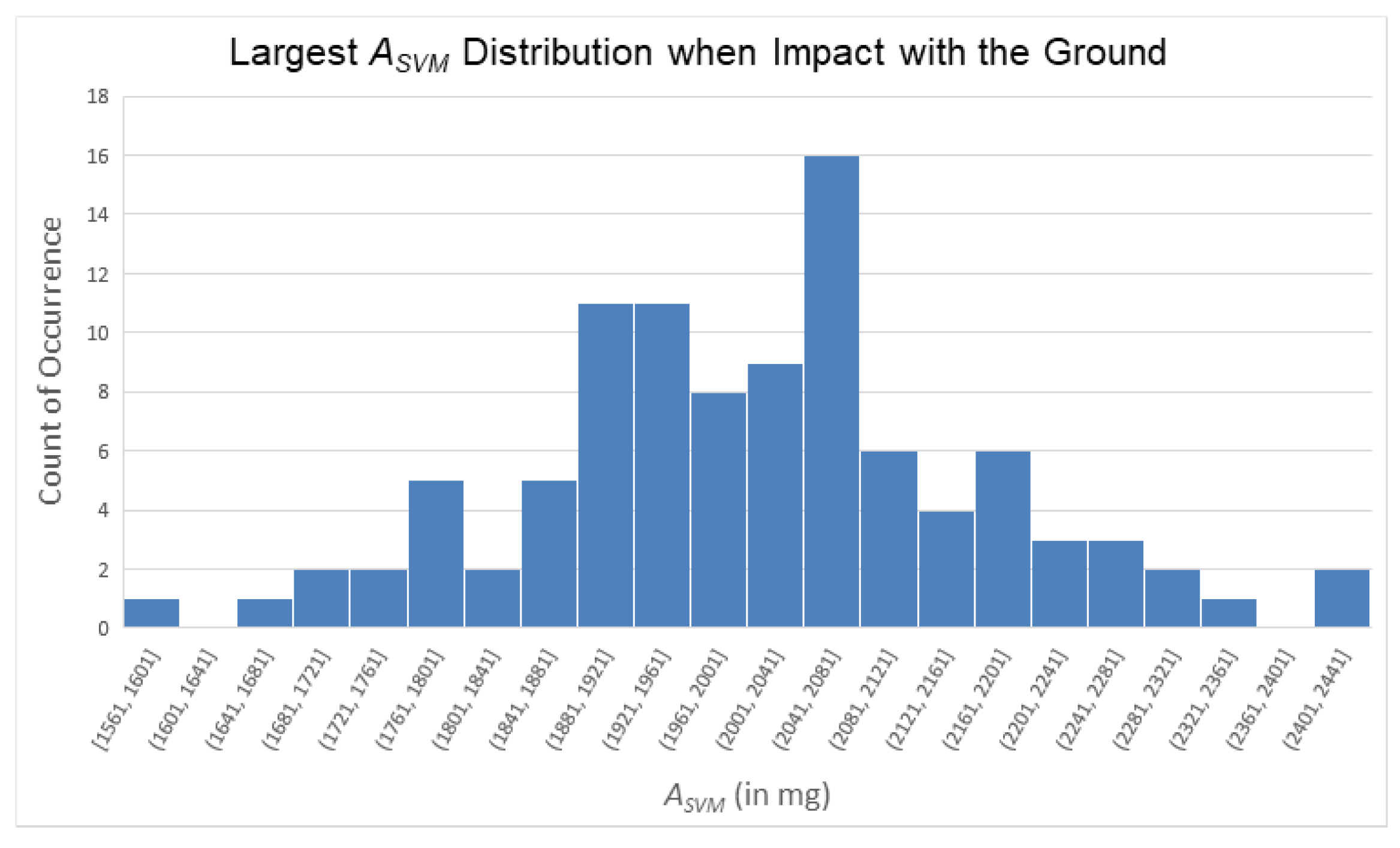
- Impact with the ground (Stage A3): The fall process was followed by a rapid increase in the signal vector magnitude due to the impact with the ground, which then quickly dropped until the subject’s movement in the vertical direction to the ground stopped. Based on experimental statistical analysis, at the moment of impact with the ground, the signal vector magnitude exceeded 1.4 G, indicating that the subject experienced a large force in the direction opposite to their motion at the moment of impact.
- Stable recovery (Stage A4): After the impact with the ground, the subject either fell onto their back or sat on the ground. Since there were no significant movement changes in the subject’s posture during this period, the accelerometer’s signal vector magnitude entered the recovery phase. The signal gradually stabilized and returned to a level close to the static 1 G.
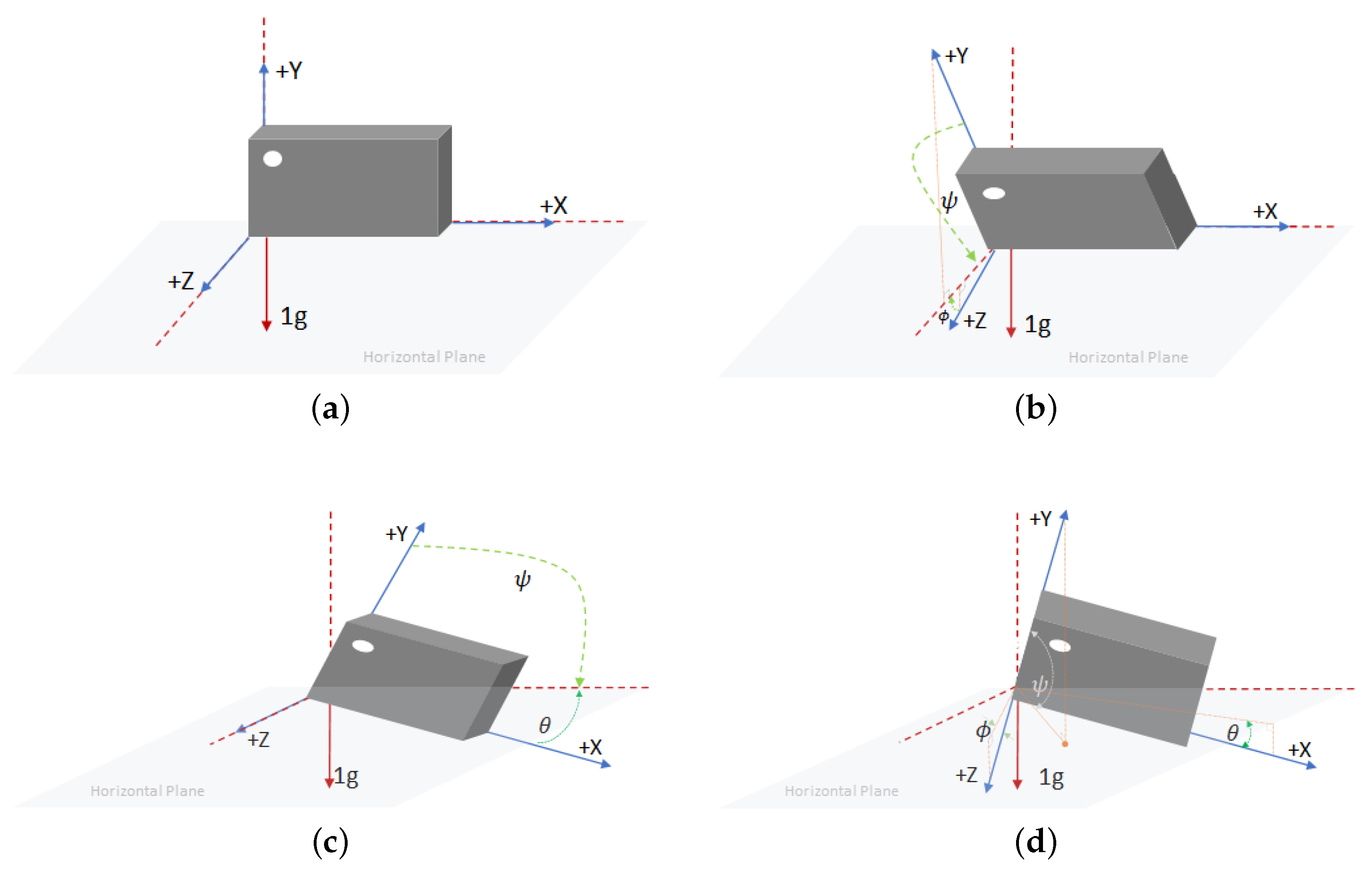
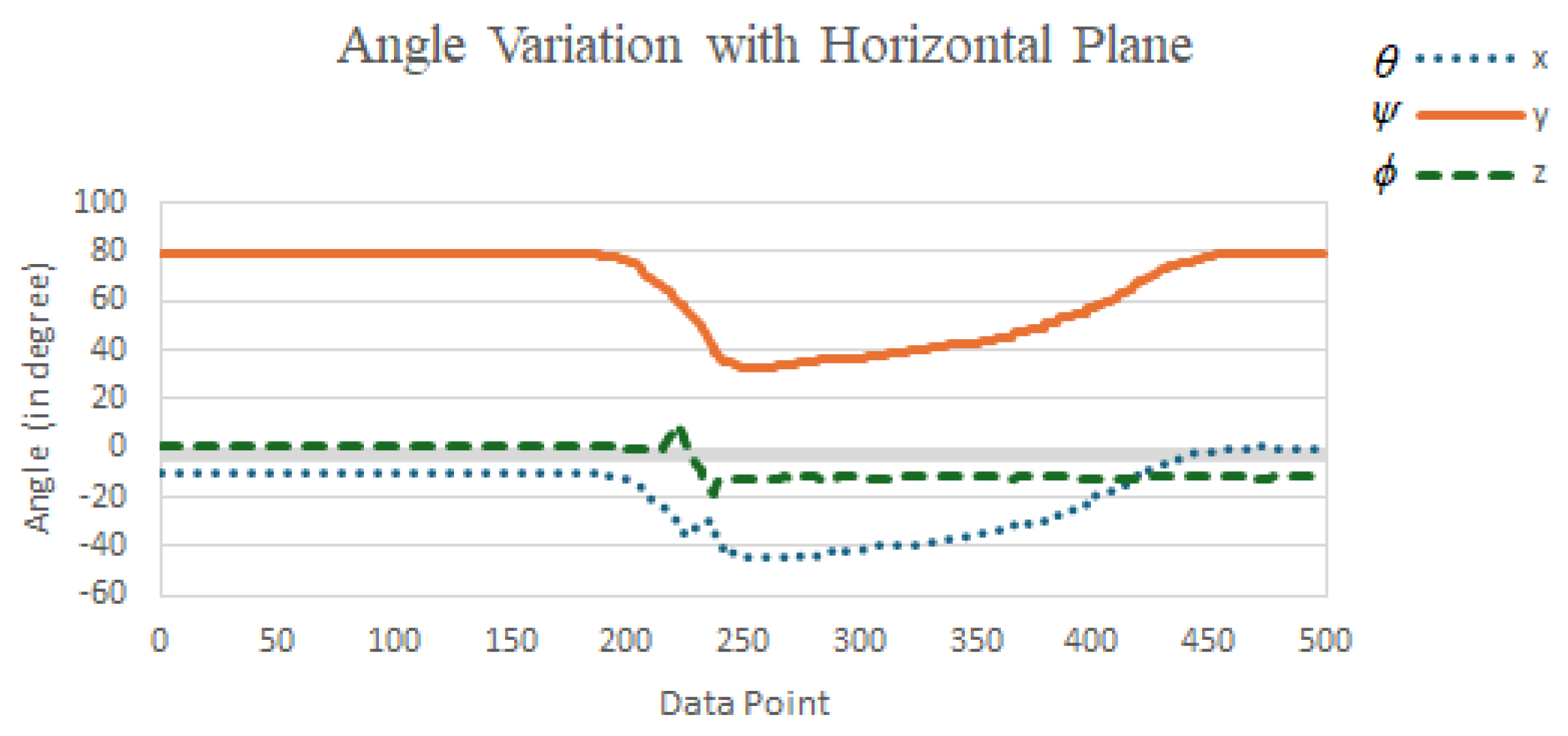
3.5. Axis Inclination Angles of the Triaxial Accelerometer
- is the angle between the x-axis and the horizon.
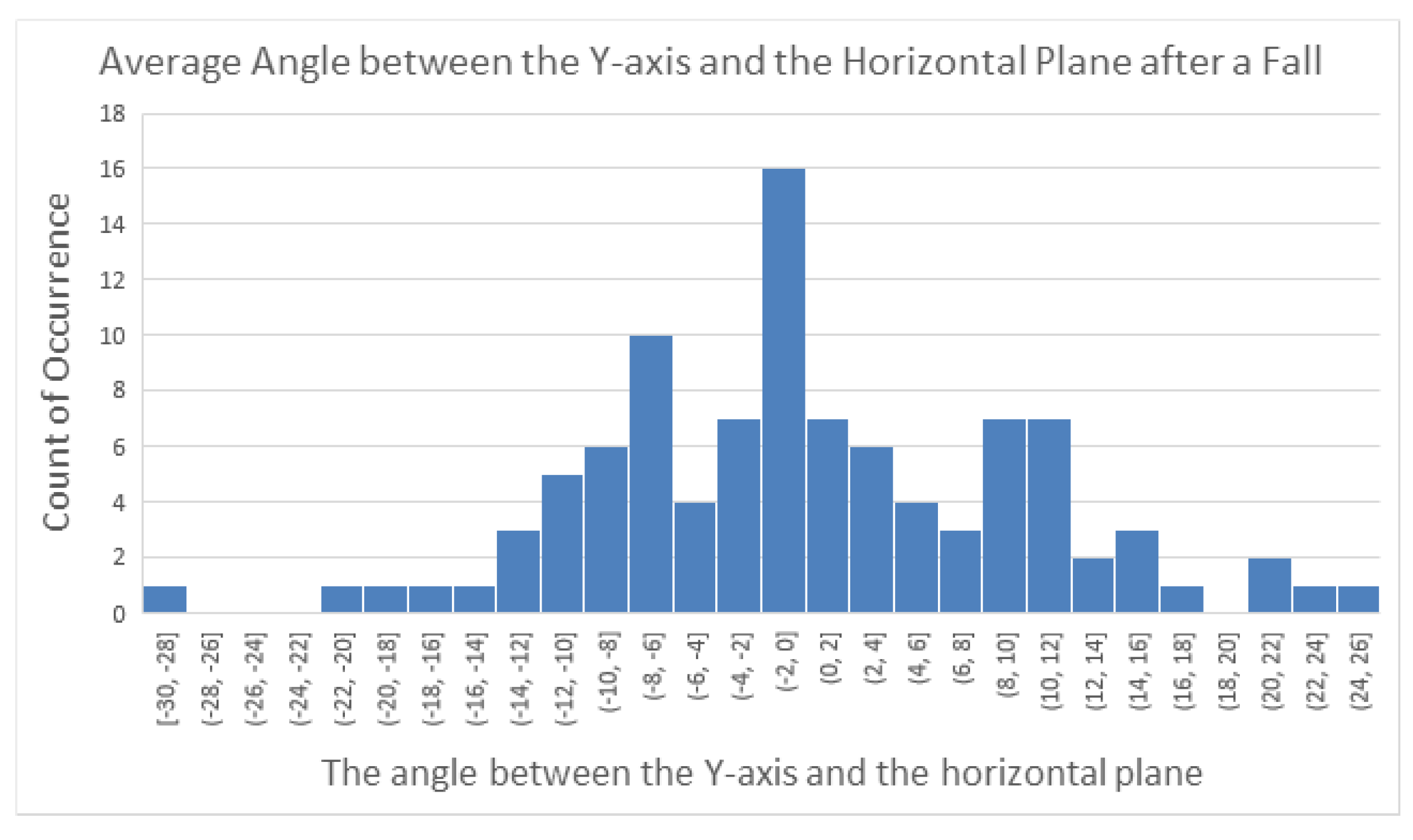
- is the angle between the y-axis and the horizon.
- is the angle between the z-axis and the horizon.
4. Proposed Finite State Machine-Based Fall Detection
4.1. Threshold Setting Principles for the Finite State Machine
4.1.1. Threshold Decision for the Loss of Balance Phase
4.1.2. Threshold Decision During Impact with the Ground
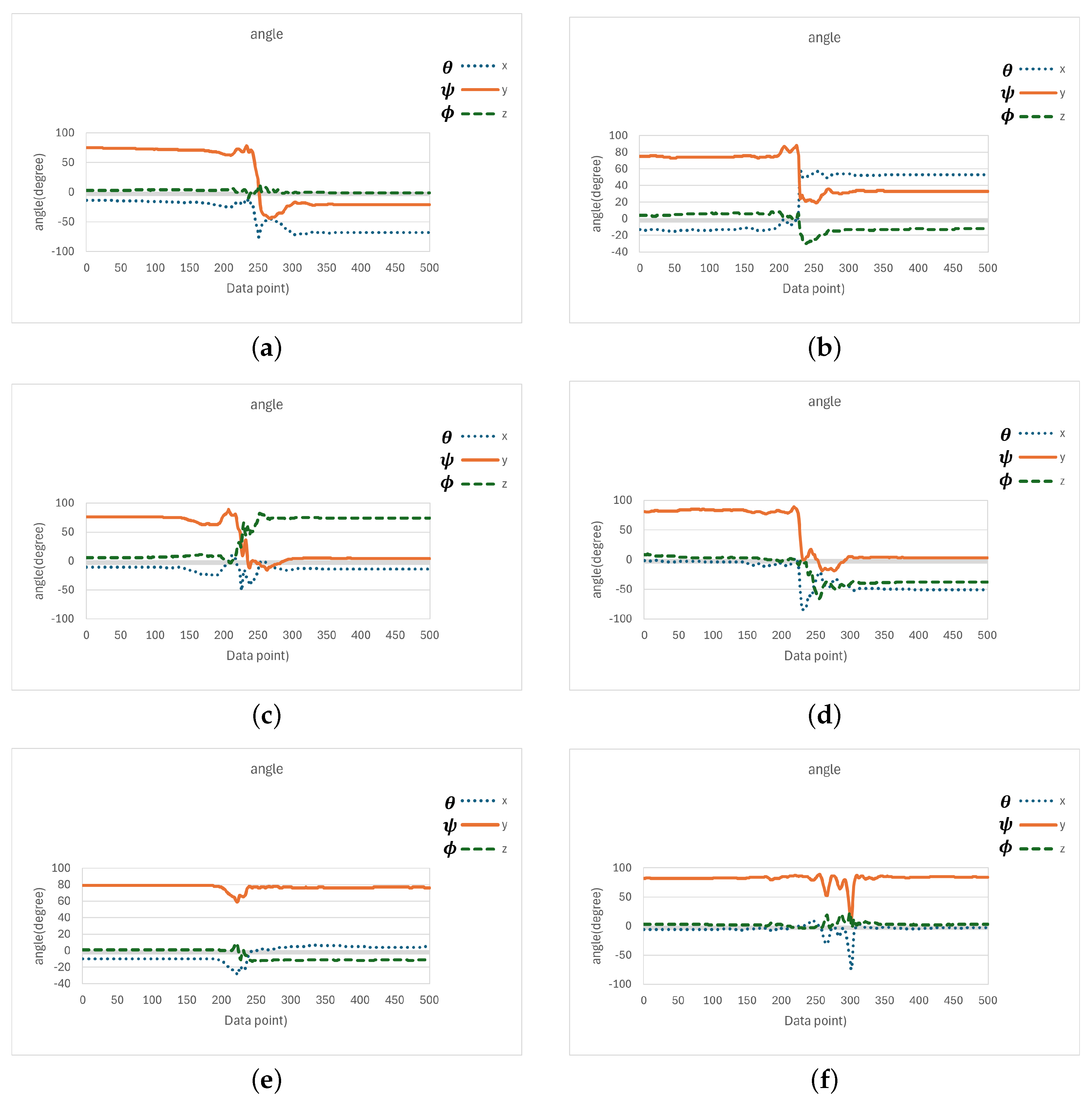
4.1.3. Threshold Decision for the Average Angle Between the Y-Axis and the Horizontal Plane After a Fall
4.2. The Six-Stage Finite State Machine Architecture
- State 1: This is the initial state, which is responsible for the trigger point check. The MCU monitors whether falls below 800 mg. If the condition is satisfied, the algorithm transitions to State 2.
- State 2: This stage aims to evaluate whether a strong reactive force resulting from ground impact is detected following the trigger point. In this stage, 200 samples of tri-axial (x, y, z) data from both the accelerometer and gyroscope are collected, and the corresponding values are calculated. If any of the 200 samples contain an value exceeding 1400 mg, the algorithm advances to State 3; otherwise, it returns to State 1.
- State 3: This stage is intended to evaluate whether the IMU signals are stabilizing. To do so, the standard deviation of the last 50 samples (i.e., samples 151 to 200) of the signal are calculated. If is less than 100 mg, the algorithm advances to State 4; otherwise, it returns to State 1.
- State 4: Similar to State 3, this stage aims to evaluate whether the IMU signals are stabilizing. Specifically, the standard deviation of the last 50 samples (i.e., samples 151 to 200) of the signal are calculated. If is less than 10 dps, the algorithm advances to State 5; otherwise, it returns to State 1.
- State 5: This stage aims to evaluate whether the IMU has experienced a change in posture orientation. To do so, the average value of the angle (the angle between the y-axis and the horizontal plane) is calculated using the last 20 samples (i.e., samples 181 to 200) from the 200 samples taken after the trigger point. If is less than 60 degrees, the algorithm advances to State 6; otherwise, it returns to State 1.
- State 6: The transition to this state indicates that a fall event has been confirmed. At this point, the MCU retrieves the GPS coordinates from the SIM7000G module and transmits the fall event along with the coordinates to the cloud server via NB-IoT. The application on the cloud server then sends an alert message through Line notifications. After completing this action, the system returns to the initial state of the state machine.
5. Experimental Results and Comparisons
5.1. Experimental Scenario
5.2. Performance Evaluation Metrics and Results
- TP (True Positive): Cases where a fall actually occurred and the system correctly detected it as a fall.
- FP (False Positive): Cases where no fall actually occurred but the system incorrectly detected a fall.
- TN (True Negative): Cases where no fall occurred and the system correctly did not detect a fall.
- FN (False Negative): Cases where a fall actually occurred but the system failed to detect it.
5.3. False Positive Analysis and Potential Mitigation Methods
5.4. False Negative Analysis
5.5. Power Consumption Analysis
- Endurance Test A.
- Baseline Power Consumption and Battery Endurance Test (All Functions Enabled):The proposed system integrated the following components:
- Microcontroller Unit STM32WB5MM: Operating in Run Mode at 64 MHz.
- Inertial Measurement Unit LSM6DSO: Operating in continuous mode.
- GNSS and NB-IoT Module SIM7000G: Operating in standby mode, with GNSS enabled (Continuous Tracking) and NB-IoT in RRC Connected state.
- Power Management IC TPS631010: For stable buck-boost voltage regulation.
Under this configuration, the average current consumption of the device was approximately 72 mA. The duration of the test was 10 h, and the battery voltage dropped from a fully charged 4.2 V to approximately 3.8 V. Additionally, the remaining battery capacity could be calculated based on the initial capacity and average discharge current, as shown in (15).where is the remaining capacity (in mAh), is the initial capacity (in mAh), is the discharge current (in mA), and t is the discharge time (in hours). In this study, the initial battery capacity was 2000 mAh, with a discharge current of 72 mA over a discharge time of 10 h. Therefore, the remaining capacity was calculated as (2000 mAh-72 mA × 10 h) = 1280 mAh, which corresponded to = 64% of the original battery capacity. Moreover, if the device was operated continuously until the battery was depleted, the operating time of the 2000 mAh lithium-ion battery was calculated as follows:This indicated that the system could operate continuously for over one day under the most active condition (all functions enabled). - Endurance Test B.
- Power-Saving Mode Endurance Test:We also analyzed the impact of lower power consumption modes on the system’s operational duration. To this end, we conducted an additional endurance test under a power-saving configuration.
- Microcontroller Unit STM32WB5MM: Operating in Run Mode at 64 MHz.
- Inertial Measurement Unit LSM6DSO: Operating in continuous mode.
- SIM7000G configured to Normal Idle mode with GNSS disabled (wake-up on demand) and NB-IoT in the RRC Idle state.
Under this condition, the average current consumption was reduced to approximately 20 mA, resulting in - Theoretical Estimation C.
- Ultra-Low Power Mode (Estimated):If a further reduction in power consumption is required, the microcontroller can be configured to operate in a low-power mode and wake only when necessary, for example, by utilizing the IMU’s “Wake-on-Shake” feature. This approach can further extend the device’s operational time. The corresponding configurations are as follows:
- The LSM6DSO IMU configured in "Wake-on-Shake" mode.
- STM32WB5MM in STOP or STANDBY low-power mode, woken via interrupt upon motion.
- GNSS and NB-IoT activated only when needed for location acquisition and data transmission.
Under this condition, the estimated average current is 5 mA, and the corresponding operating time is shown below.
5.6. Comparisons to Existing State-of-the-Art Fall Detectors
6. Limitations and Future Work
6.1. GPS Limitations and Positioning Alternatives Without GPS Signals
- Wi-Fi-based positioning:Utilizing a received signal strength indicator (RSSI) or fingerprinting from nearby access points to estimate indoor location with room-level accuracy, leveraging existing Wi-Fi infrastructure. This approach requires either replacing the current module with one that supports Wi-Fi functionality or adding a separate Wi-Fi chip to the existing module.
- Inertial Navigation System (INS):Using accelerometers and gyroscopes to estimate short-term motion and location via dead reckoning. While INS alone is prone to drift, it can be combined with other methods for improved accuracy.
- Bluetooth Low Energy (BLE)-based positioning:Our current hardware platform, the STM32WB5MMG microcontroller, already integrates BLE capability. This enables the future integration of BLE-based indoor localization using methods such as trilateration from fixed BLE beacons or proximity-based detection. BLE positioning offers a cost-effective, energy-efficient solution suitable for indoor environments like smart homes or eldercare facilities.
- Ultra-Wideband (UWB):Although not currently implemented, UWB offers superior accuracy (within 10–30 cm) and may be explored in future system versions for high-precision tracking in specific use cases. This approach requires adding a UWB transceiver chip, such as the Qorvo DW1000, to the existing module.
- Sensor fusion:Combining the above techniques (e.g., BLE + INS or Wi-Fi + INS) through filtering algorithms like Kalman filters can mitigate individual limitations and provide robust indoor tracking performance.
6.2. Integrating Artificial Intelligence into Next-Generation User-Customized Devices
- A.
- Offline Calibration Using Individual Activity Data:Before deploying the device, brief data collection from the user’s typical daily activities, especially those prone to being misclassified (e.g., quick sitting), can be used for parameter refinement.
- B.
- AI-Driven Parameter Optimization (Offline):Although full deep learning is unsuitable for microcontroller execution, AI models can be trained offline to suggest or adapt FSM thresholds. Several strategies will be explored:
- Meta-learning approaches (e.g., MAML, Reptile) for few-shot personalization using a small amount of user data.
- Neural networks for parameter recommendation, mapping user profiles or calibration patterns to threshold values.
- Bayesian optimization to efficiently search for optimal threshold combinations, minimizing misclassification.
- Clustering-based transfer learning, where users are grouped by movement similarity and share optimized parameter sets.
- C.
- Low-Complexity Machine Learning Alternatives:Replacing certain FSM states with low-complexity classifiers such as linear–kernel support vector machines (SVMs) could improve adaptability while retaining microcontroller compatibility. These models can be optimized offline to ensure lightweight deployment.
- D.
- Reinforcement Learning for Adaptive Tuning:In longer-term development, reinforcement learning techniques may be applied to continuously refine thresholds during use, based on system feedback and performance metrics.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| NB-IoT | Narrowband Internet of Things |
| IMU | Inertial Measurement Unit |
| MCU | Microcontroller Unit |
| KNN | K-Nearest Neighbor |
| SVM | Support Vector Machine |
| CNN | Convolutional Neural Network |
| RNN | Recurrent Neural Network |
| APP | Application Program |
| BLE | Bluetooth Low Energy |
| PCB | Printed Circuit Board |
| LTE | Long-Term Evolution |
| SVM | Signal Vector Magnitude |
| SMS | Short Message Service |
References
- National Development Council. Population Projections for the Taiwan. National Development Council, October 2024. Available online: https://pop-proj.ndc.gov.tw/main_en/cp.aspx?n=137 (accessed on 9 June 2025).
- Xu, T.; Zhou, Y.; Zhu, J. New Advances and Challenges of Fall Detection Systems: A Survey. Appl. Sci. 2018, 8, 418. [Google Scholar] [CrossRef]
- Hsieh, C.-Y.; Huang, C.-N.; Liu, K.-C.; Chu, W.-C.; Chan, C.-T. A machine learning approach to fall detection algorithm using wearable sensor. In Proceedings of the 2016 International Conference on Advanced Materials for Science and Engineering (ICAMSE), Tainan, Taiwan, 12–13 November 2016; pp. 707–710. [Google Scholar]
- Nari, M.I.; Suprapto, S.S.; Kusumah, I.H.; Adiprawita, W. A simple design of wearable device for fall detection with accelerometer and gyroscope. In Proceedings of the 2016 International Symposium on Electronics and Smart Devices (ISESD), Bandung, Indonesia, 29–30 November 2016; pp. 88–91. [Google Scholar]
- Boudouane, I.; Makhlouf, A.; Djelal, N.; Saadia, N.; Ramdane-Chérif, A. Portable Fall Detection System Using a Triaxial Accelerometer Based on a Thresholds Algorithm. In Proceedings of the 2023 IEEE International Conference on Artificial Intelligence & Green Energy (ICAIGE), Sousse, Tunisia, 12–14 October 2023; pp. 1–5. [Google Scholar]
- Campanella, S.; Alnasef, A.; Falaschetti, L.; Belli, A.; Pierleoni, P.; Palma, L. A Novel Embedded Deep Learning Wearable Sensor for Fall Detection. IEEE Sens. J. 2024, 24, 15219–15229. [Google Scholar] [CrossRef]
- Kau, L.-J.; Chen, C.-S. A Smart Phone-based Pocket Fall Accident Detection, Positioning and Rescue System. IEEE J. Biomed. Health Inform. 2015, 19, 44–56. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.-L.; Chiu, W.-C.; Chen, F.-H.; Ho, Y.-H.; Chu, T.-C.; Hsieh, P.-H. Fall monitoring for the elderly using wearable inertial measurement sensors on eyeglasses. IEEE Sens. Lett. 2020, 4, 6000804. [Google Scholar] [CrossRef]
- Pandya, B.; Pourabdollah, A.; Lotfi, A. Fuzzy logic web services for real-time fall detection using wearable accelerometer and gyroscope sensors. In Proceedings of the 13th ACM International Conference on Pervasive Technologies Related to Assistive Environments, Corfu, Greece, 30 June–3 July 2020; pp. 1–7. [Google Scholar]
- Casilari, E.; Álvarez-Marco, M.; García-Lagos, F. A study of the use of gyroscope measurements in wearable fall detection systems. Symmetry 2020, 12, 649. [Google Scholar] [CrossRef]
- Chen, M.; Yang, Z.; Lai, J.; Chu, P.; Lin, J. A three-stage low-complexity human fall detection method using IR-UWB radar. IEEE Sens. J. 2022, 22, 15154–15168. [Google Scholar] [CrossRef]
- Sadreazami, H.; Bolic, M.; Rajan, S. Contactless fall detection using time-frequency analysis and convolutional neural networks. IEEE Trans. Ind. Inform. 2021, 17, 6842–6851. [Google Scholar] [CrossRef]
- Yao, Y.; Liu, C.; Zhang, H.; Yan, B.; Jian, P.; Wang, P.; Du, L.; Chen, X.; Han, B.; Fang, Z. Fall detection system using millimeter-wave radar based on neural network and information fusion. IEEE Internet Things J. 2022, 9, 21038–21050. [Google Scholar] [CrossRef]
- Chang, W.-J.; Hsu, C.-H.; Chen, L.-B. A pose estimation-based fall detection methodology using artificial intelligence edge computing. IEEE Access 2021, 9, 129965–129976. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, D.; Wang, Y.; Ma, J.; Wang, Y.; Li, S. RT-Fall: A Real-Time and Contactless Fall Detection System with Commodity WiFi Devices. IEEE Trans. Mob. Comput. 2017, 16, 511–526. [Google Scholar] [CrossRef]
- Ding, J.; Wang, Y. A WiFi-Based Smart Home Fall Detection System Using Recurrent Neural Network. IEEE Trans. Consum. Electron. 2020, 66, 308–317. [Google Scholar] [CrossRef]
- Lu, N.; Wu, Y.; Feng, L.; Song, J. Deep Learning for Fall Detection: Three-Dimensional CNN Combined with LSTM on Video Kinematic Data. IEEE J. Biomed. Health Inform. 2019, 23, 314–323. [Google Scholar] [CrossRef] [PubMed]
- Santos, G.L.; Lima, M.A.; de Souza, F.M.; de Albuquerque, V.H.C.; Cardoso, J.M.P. Accelerometer-Based Human Fall Detection Using Convolutional Neural Networks. Sensors 2019, 19, 1644. [Google Scholar] [CrossRef] [PubMed]
- Singh, S.P.; Sharma, M.K.; Lay-Ekuakille, A.; Gangwar, D.; Gupta, S. Deep ConvLSTM with Self-Attention for Human Activity Decoding Using Wearable Sensors. IEEE Sens. J. 2021, 21, 8575–8582. [Google Scholar] [CrossRef]
- Maitre, J.; Bouchard, K.; Gaboury, S. Fall Detection with UWB Radars and CNN-LSTM Architecture. IEEE J. Biomed. Health Inform. 2021, 25, 1273–1283. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Zhang, L.; Tang, Y.; Han, C.; Wu, H.; Song, A. Channel Attention for Sensor-Based Activity Recognition: Embedding Features into All Frequencies in DCT Domain. IEEE Trans. Knowl. Data Eng. 2023, 35, 12497–12512. [Google Scholar] [CrossRef]
- Wu, L.; Ye, M.; Liu, Y.; Cheng, J.; Yin, J.; Huang, H.; Wu, X. Video-Based Fall Detection Using Human Pose and Constrained Generative Adversarial Network. IEEE Trans. Circuits Syst. Video Technol. 2024, 34, 2179–2194. [Google Scholar] [CrossRef]
- STMicroelectronics. STM32WB5MMG Datasheet. Available online: https://www.st.com/en/microcontrollers-microprocessors/stm32wb5mmg.html (accessed on 9 June 2025).
- STMicroelectronics. LSM6DSO Datasheet. Available online: https://www.st.com/en/mems-and-sensors/lsm6dso.html (accessed on 9 June 2025).
- Özdemir, A.T. An analysis on sensor locations of the human body for wearable fall detection devices: Principles and practice. Sensors 2016, 16, 1161. [Google Scholar] [CrossRef] [PubMed]
- Analog Devices. Using an Accelerometer for Inclination Sensing. Available online: https://www.analog.com/en/resources/app-notes/an-1057.html (accessed on 9 June 2025).
- Sabatini, A.M.; Ligorio, G.; Mannini, A.; Genovese, V.; Pinna, L. Prior-to- and Post-Impact Fall Detection Using Inertial and Barometric Altimeter Measurements. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 774–783. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Age | Height | Weight | Gender | |
|---|---|---|---|---|
| Participant01 | 27 | 163 cm | 49 kg | Female |
| Participant02 | 48 | 165 cm | 60 kg | Female |
| Participant03 | 53 | 168 cm | 57 kg | Female |
| Participant04 | 68 | 150 cm | 46 kg | Female |
| Participant05 | 22 | 190 cm | 55 kg | Female |
| Participant06 | 26 | 172 cm | 70 kg | Male |
| Participant07 | 26 | 173 cm | 85 kg | Male |
| Participant08 | 26 | 171 cm | 78 kg | Male |
| Participant09 | 27 | 183 cm | 60 kg | Male |
| Participant10 | 35 | 173 cm | 85 kg | Male |
| Participant11 | 38 | 178 cm | 70 kg | Male |
| Participant12 | 43 | 177 cm | 90 kg | Male |
| Participant13 | 51 | 172 cm | 85 kg | Male |
| Participant14 | 57 | 180 cm | 82 kg | Male |
| Participant15 | 60 | 179 cm | 75 kg | Male |
| Average | 40.47 | 172.93 cm | 70.67 kg | - |
| SD | 14.91 | 9.41 cm | 15.75 kg | - |
| Activities | Fall Down | Going Upstairs | Going Downstairs | Walking | Running | Stepping | Sitting Down | Quickly Sitting Down | Jumping |
|---|---|---|---|---|---|---|---|---|---|
| Samples | 750 | 750 | 750 | 750 | 750 | 750 | 750 | 750 | 750 |
| True Positive | 734 | - | - | - | - | - | - | - | - |
| False Positive | - | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 0 |
| True Negative | - | 750 | 750 | 750 | 750 | 750 | 750 | 745 | 750 |
| False Negative | 16 | - | - | - | - | - | - | - | - |
| Sensitivity | 0.979 | ||||||||
| Specificity | 0.999 | ||||||||
| Accuracy | 0.997 | ||||||||
| Item | Proposed | [6] | [8] | [27] |
|---|---|---|---|---|
| Processing Unit | MCU STM32WB5MMG | MCU STM32U575xx | Arduino MCU | NXP LPC1768 Smartphone Samsung Galaxy SII |
| Device Location | Waist | Waist | Head | Waist |
| Algorithm | FSM | Deep Learning- based Algorithm | FSM | Threshold- based Algorithm |
| Test Data Count | Fall 50 Non-Fall 400 | Fall 225 Non-Fall 437 | Fall 120 Non-Fall 450 | Fall 375 Non-Fall 3 hours |
| Sensors Used | Accelerometer Gyroscope | Accelerometer Gyroscope | Barometer | Accelerometer Gyroscope Barometer |
| Accuracy (%) | 99.7% | 99.38% | 95.83% | 100% |
| Sensitivity (%) | 97.9% | 99.79% | 97.33% | 100% |
| Specificity (%) | 99.9% | 98.62% | 95.44% | 100% |
| Alarm Notification | Line | GSM | E-mail +SMS | N/A |
| Communication Method | NB-IoT | GSM | WiFi | Bluetooth + WiFi For offline analysis |
| Automatic Connection | O | O | X | O |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tseng, C.-K.; Huang, S.-J.; Kau, L.-J. Wearable Fall Detection System with Real-Time Localization and Notification Capabilities. Sensors 2025, 25, 3632. https://doi.org/10.3390/s25123632
Tseng C-K, Huang S-J, Kau L-J. Wearable Fall Detection System with Real-Time Localization and Notification Capabilities. Sensors. 2025; 25(12):3632. https://doi.org/10.3390/s25123632
Chicago/Turabian StyleTseng, Chin-Kun, Shi-Jia Huang, and Lih-Jen Kau. 2025. "Wearable Fall Detection System with Real-Time Localization and Notification Capabilities" Sensors 25, no. 12: 3632. https://doi.org/10.3390/s25123632
APA StyleTseng, C.-K., Huang, S.-J., & Kau, L.-J. (2025). Wearable Fall Detection System with Real-Time Localization and Notification Capabilities. Sensors, 25(12), 3632. https://doi.org/10.3390/s25123632