
Robotic-Assisted XRF Testing System for In-Situ Areal Density Measurement of Light-Sensitive Explosive Coatings

Abstract
1. Introduction
2. XRF System
2.1. XRF Theory
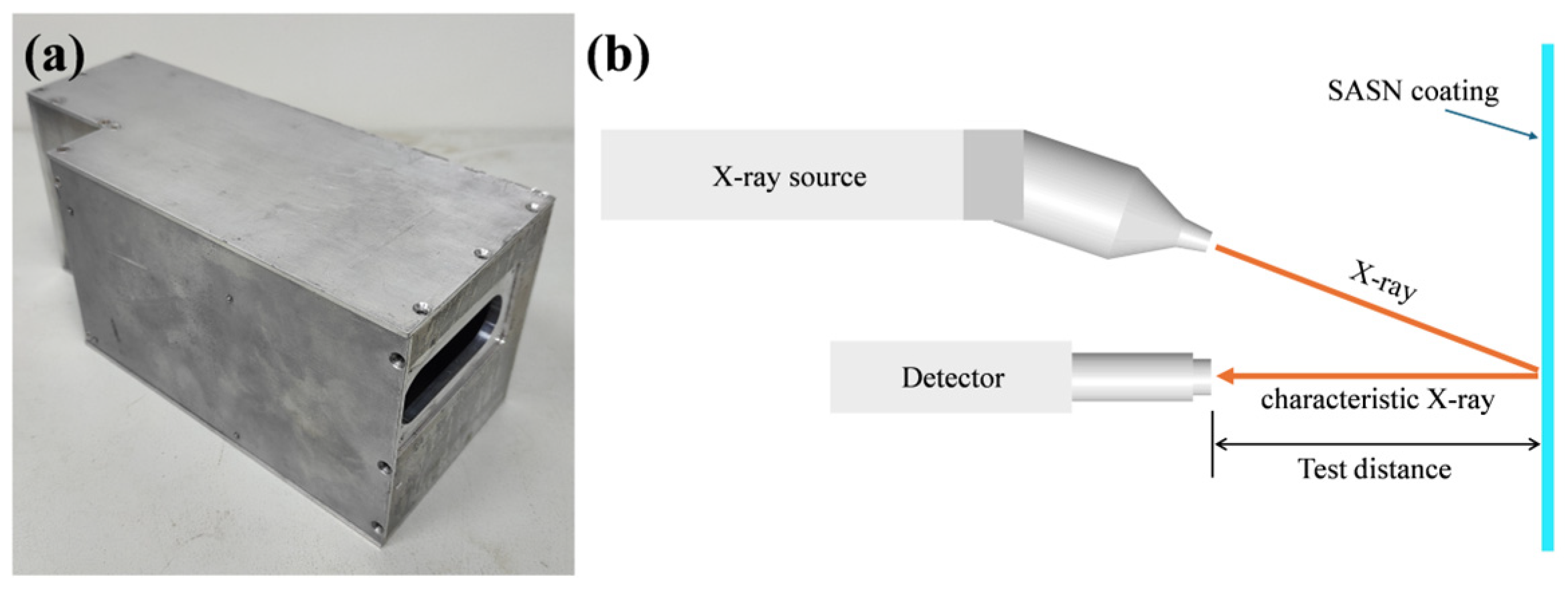
2.2. XRF Testing System
3. Experimental and Analysis
3.1. SASN Production
3.2. SASN Coatings Production
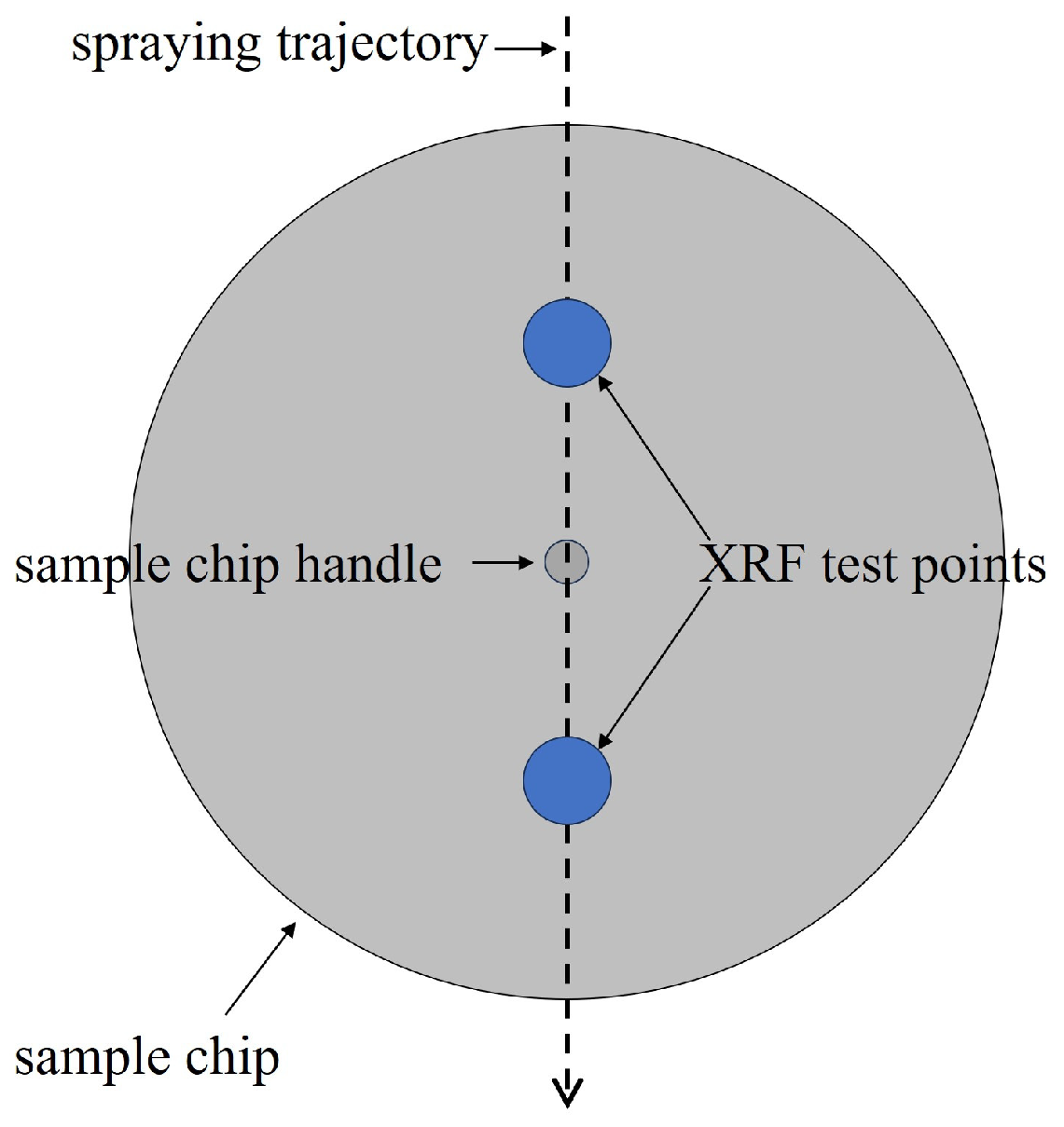
3.3. XRF Data Collection
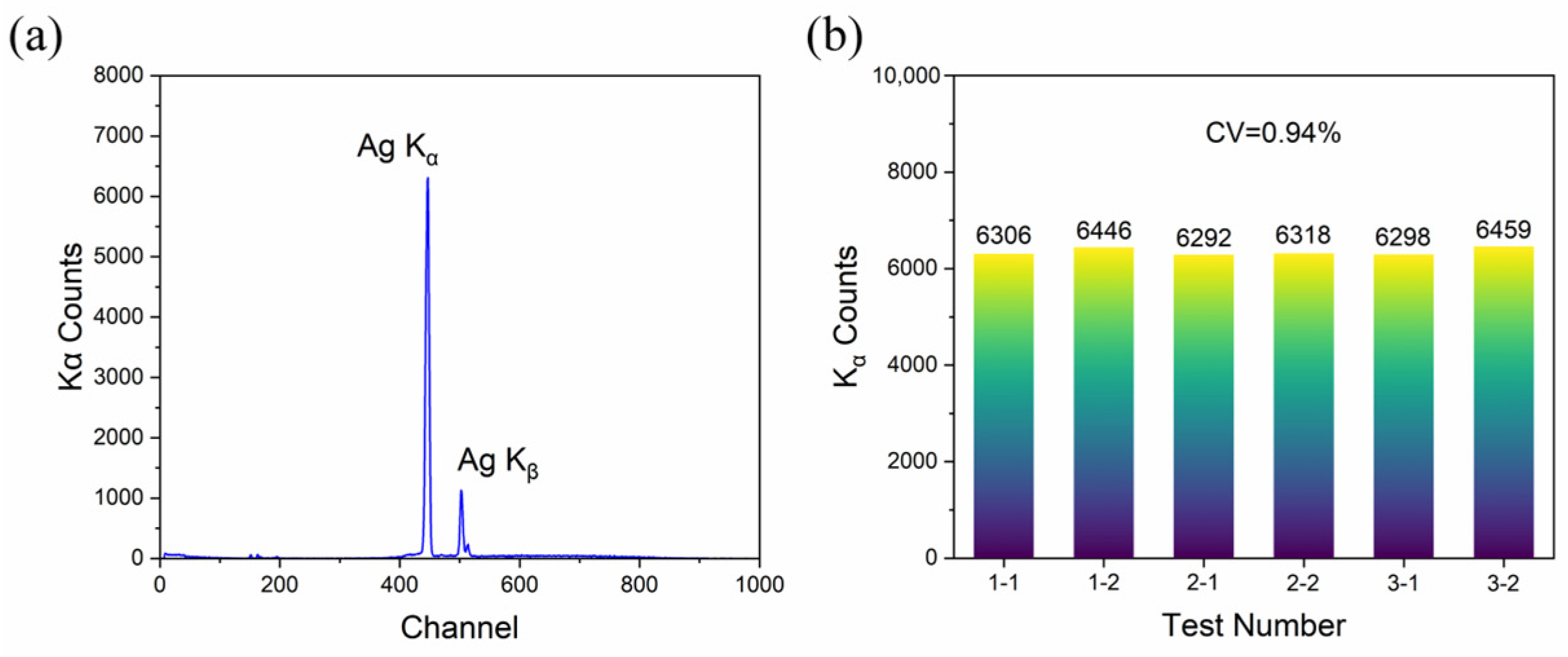
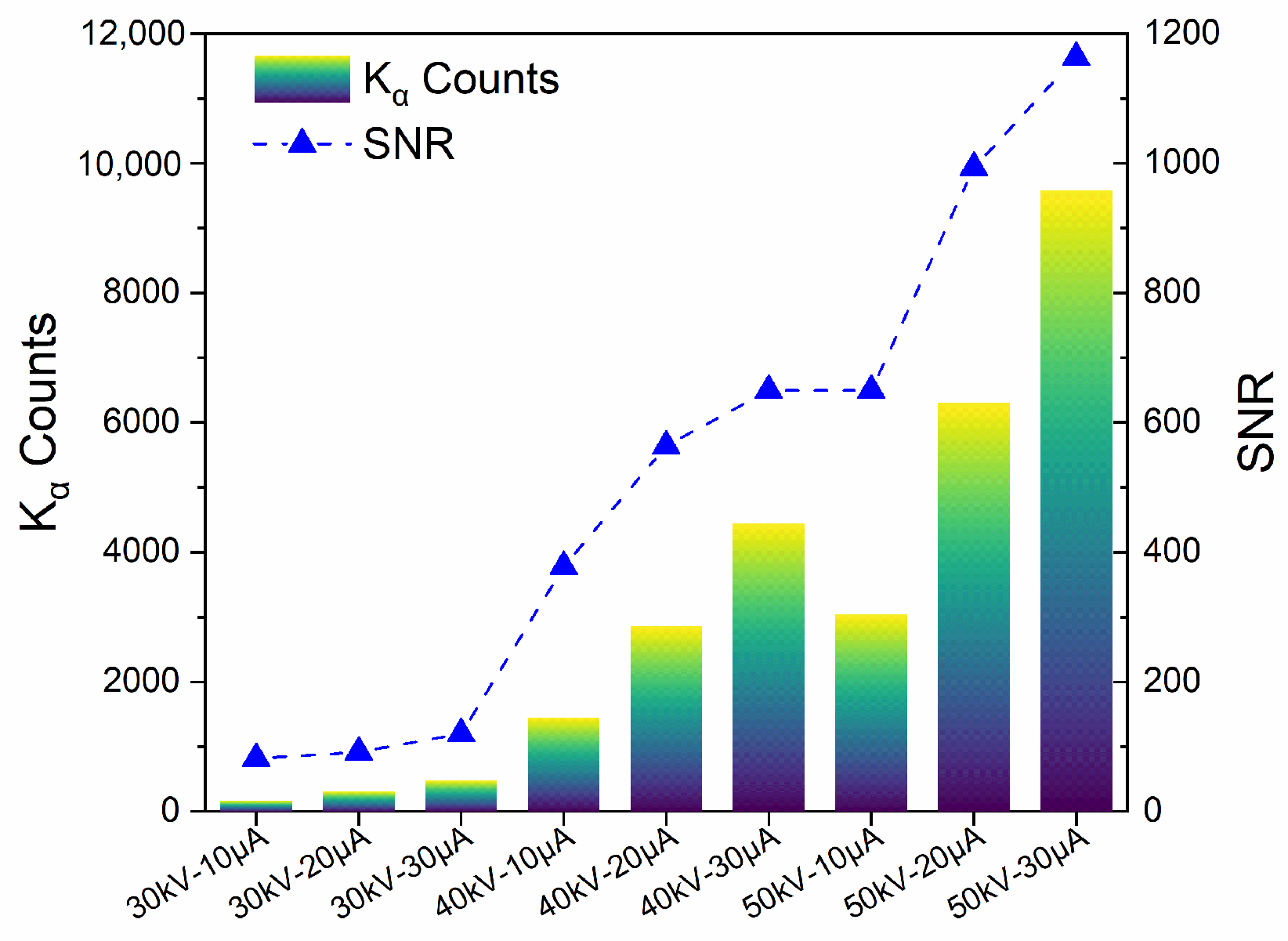
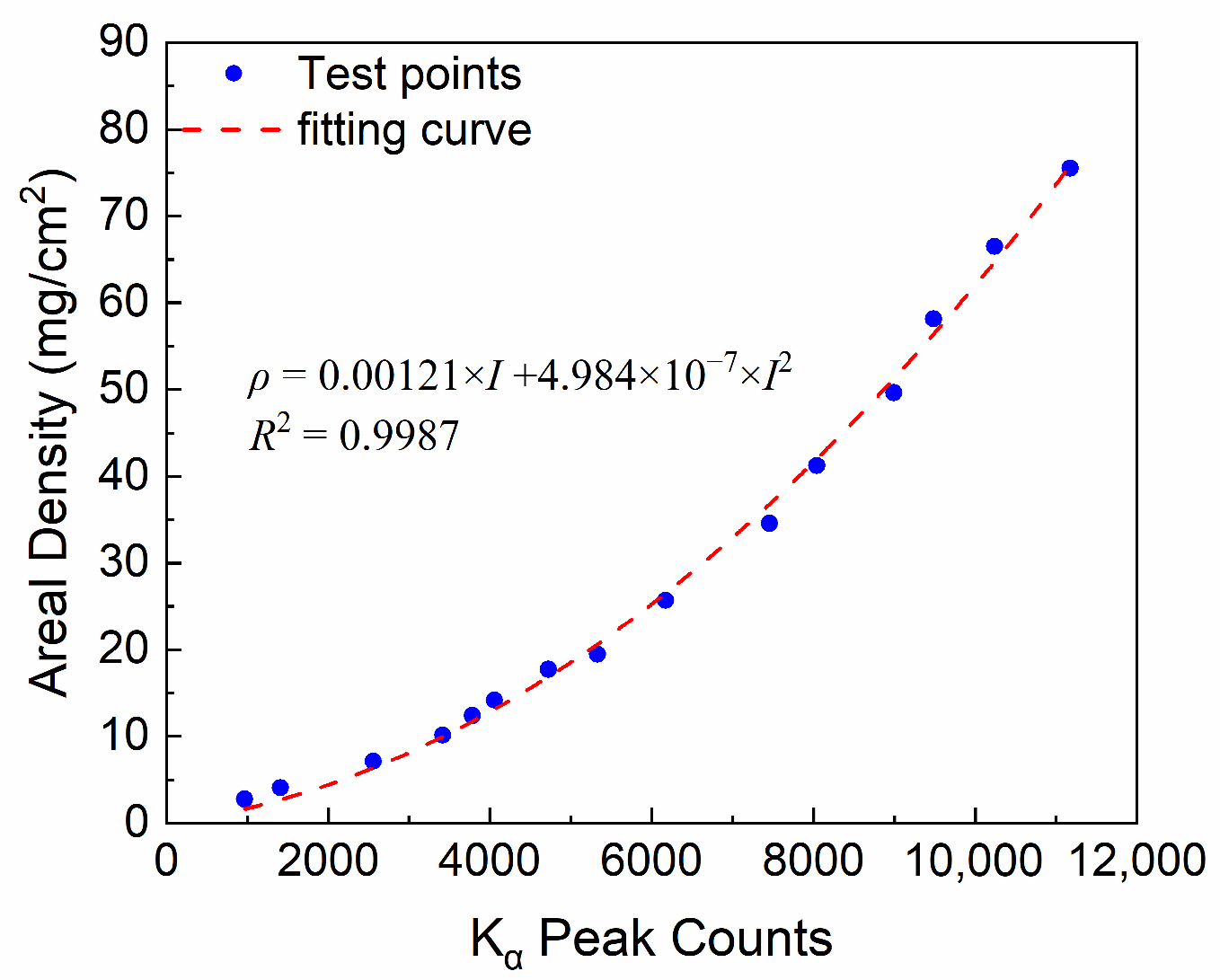
3.4. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SASN | Silver acetylide–silver nitrate |
References
- Zhao, X.; Zhang, M.; Qian, W.; Gong, F.; Liu, J.; Zhang, Q.; Yang, Z. Interfacial engineering endowing energetic co-particles with high density and reduced sensitivity. Chem. Eng. J. 2020, 387, 124209. [Google Scholar] [CrossRef]
- Liu, D.; Wang, J.; Zhao, X.; Yang, Z. Dye Decorated Ammonium Perchlorate with Fast Decomposition and High Safety Performance. Adv. Funct. Mater. 2025, 35, 2418301. [Google Scholar] [CrossRef]
- Qin, Y.; Huang, X.; Jiang, D.; Zhou, T.; Yu, H.; Song, Y.; Li, F.; Liu, J. Energetic properties of core–shell B@PVDF/AP composite micro-units prepared by electrostatic spraying technology. Chem. Eng. J. 2024, 496, 154379. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, S.; Wang, X.; Wu, Z.; Ding, B.; Yang, L.; Tong, W.; Ma, Q.; Wang, Q. Single Cu Atoms Anchored Energetic COFs as Combustion Catalytic Promoters toward Rapid and Concentrated Thermal Decomposition of Ammonium Perchlorate. Adv. Sci. 2025, e01761. [Google Scholar] [CrossRef] [PubMed]
- Sui, Y.; Chen, B.; Xu, H.; Pei, M.; Li, Y.; Zhang, D. Electromagnetic Interference Protection Technology in Loading Experiment of Light-Initiated Explosive. Mod. Appl. Phys. 2019, 10, 021203. [Google Scholar]
- Xu, H.; Xu, C.; Wei, X.; Wan, C.; Xu, K. Thermal Decomposition Characteristics of Silver Acetylide-Silver Nitrate (Ag2C2·AgNO3). Chin. J. Energetic Mater. 2022, 30, 666–672. [Google Scholar]
- Xu, H.; Xu, C.; Zheng, Y.; Zhang, H.; Wang, J.; Yang, Y. Continuous synthesis of a silver-based primary explosive with high purity. Chem. Eng. Sci. 2024, 300, 120634. [Google Scholar] [CrossRef]
- Xu, C.; Li, Q.; Dong, P.; Xu, H.; Zhang, D.; Xu, K. Design and fabrication of high-energy SASN/g-C3N4 composites for enhanced electrostatic safety and thermal stability. J. Solid State Chem. 2025, 345, 125248. [Google Scholar] [CrossRef]
- Dong, P.; Xu, C.; Wu, K.; Sui, Y.; Chen, B.; Yao, W.; Zhang, D.; Xu, H. Modeling of Light-Initiated Explosive Spray Distribution and Validation of Uniform Coating Technology. Acta Armamentarii 2024. Available online: http://www.co-journal.com/CN/10.12382/bgxb.2024.1059 (accessed on 3 June 2025).
- Mao, Y.; Deng, H.; He, R. Several simulation techniques of blow-off impulses by intense pulsed cold X-rays. Struct. Environ. Eng. 2003, 30, 55–64. [Google Scholar]
- Wang, D.; Li, J.; Zhang, Y.; Li, H.; Wang, S. Study on Characteristics of the Light-Initiated High Explosive-Based Pulse Laser Initiation. Materials 2022, 15, 4100. [Google Scholar] [CrossRef] [PubMed]
- Brocchieri, J.; Sabbarese, C. Thickness determination of the gilding on brass materials by XRF technique. Nucl. Instrum. Methods Phys. Res. Sect. B Beam Interact. Mater. At. 2021, 496, 29–36. [Google Scholar] [CrossRef]
- Barrea, R.; Bengió, S.; Derosa, P.; Mainardi, R. Absolute mass thickness determination of thin samples by X-ray fluorescence analysis. Nucl. Instrum. Methods Phys. Res. Sect. B Beam Interact. Mater. At. 1998, 143, 561–568. [Google Scholar] [CrossRef]
- Zięba-Palus, J.; Borusiewicz, R. Examination of multilayer paint coats by the use of infrared, Raman and XRF spectroscopy for forensic purposes. J. Mol. Struct. 2006, 792, 286–292. [Google Scholar] [CrossRef]
- Zheng, Z.; Smirnova, D.; Sanderson, G.; Cuifeng, Y.; Koutsogeorgis, D.; Huang, L. Broadband infrared imaging governed by guided-mode resonance in dielectric metasurfaces. Light Sci. Appl. 2024, 13, 249. [Google Scholar] [CrossRef]
- Huang, H.; Li, Z.; Zhang, Q.; Hui, J.; Zheng, Z.; Sun, D.; Panezai, S. Infrared Digital Holography. IEEE Trans. Instrum. Meas. 2024, 73, 4508337. [Google Scholar] [CrossRef]
- Wei, Y.; Zhang, S.; Luo, Y.; Ding, L.; Zhang, D. Accurate Depth Determination of Defects in Composite Materials using Pulsed Thermography. Compos. Struct. 2021, 267, 113846. [Google Scholar] [CrossRef]
- Tang, Q.; Liu, J.; Dai, J.; Yu, Z. Theoretical and experimental study on thermal barrier coating (TBC) uneven thickness detection using pulsed infrared thermography technology. Appl. Therm. Eng. 2017, 114, 770–775. [Google Scholar] [CrossRef]
- Dixon, S.; Edwards, C.; Palmer, S.B. High accuracy non-contact ultrasonic thickness gauging of aluminium sheet using electromagnetic acoustic transducers. Ultrasonics 2001, 39, 445–453. [Google Scholar] [CrossRef]
- Pfeifer, T.; Benz, M.; Engelmann, B.; Hafner, P. High precision ultrasonic on-machine measurement. Measurement 2006, 39, 407–414. [Google Scholar] [CrossRef]
- Palanisamy, R.; Pyun, D.; Findikoglu, A. Accurate Ultrasonic Thickness Measurement for Arbitrary Time-Variant Thermal Profile. Sensors 2024, 24, 5304. [Google Scholar] [CrossRef] [PubMed]
- Yao, B.; Cai, Z.; Lu, J.; Ma, X.; Chen, B. Novel laser triangulation measurement method for screw rotor profile under multi-factor constraints. Measurement 2020, 152, 107317. [Google Scholar] [CrossRef]
- Wu, C.; Chen, B. An automatic measurement system for the wall thickness of corrugated plate based on laser triangulation method. Adv. Eng. Inform. 2023, 55, 101814. [Google Scholar] [CrossRef]
- Xu, Q.; Chen, G.; Zhu, X.; Xu, A.; Yang, H. Laser On-Line Thickness Measurement Technology Based on Judgment and Wavelet De-Noising. Appl. Mech. Mater. 2014, 568, 45–49. [Google Scholar] [CrossRef]
- Chursin, Y.; Redko, L.; Fedorov, E. Enlargement of measuring zone in laser gauges without sacrificing measurement accuracy. Measurement 2019, 131, 647–653. [Google Scholar] [CrossRef]
- Jesus, E.; Simabuco, S.; Anjos, M.; Lopes, R. Synchrotron radiation X-ray fluorescence analysis of trace elements in Nerium oleander for pollution monitoring. Spectrochim. Acta Part B At. Spectrosc. 2000, 55, 1181–1187. [Google Scholar] [CrossRef]
- Armetta, F.; Saladino, M.; Martinelli, M.; Vilardo, R.; Anastasio, G.; Trusso, S.; Nardo, V.; Giuffrida, D.; Ponterio, R. Improved chemometric approach for XRF data treatment: Application to the reverse glass paintings from the Lipari collection. RSC Adv. 2023, 13, 4495. [Google Scholar] [CrossRef]
- Obregón, C.; Jara, M.; Arizapana, F.; Huayllani, Y.; Bellido, J.; Olivera, J. XRF elemental analysis of inks in South American manuscripts from 1779 to 1825. Herit. Sci. 2021, 9, 147. [Google Scholar] [CrossRef]
- Surdi, M.; Tack, P.; Lycke, S.; Schder, S.; Graef, K. Synchrotron XRF spectroscopy for reading salt-encrusted cuneiform tablets. Sci. Rep. 2025, 15, 3283. [Google Scholar] [CrossRef]
- Nader, M.; Fleming, D. Assessment of alternative methods for analyzing X-ray fluorescence spectra. Appl. Radiat. Isot. 2019, 146, 133–138. [Google Scholar] [CrossRef]
- Hu, L.; Wang, J.; Xiong, X.; Yan, R.; Zhang, T.; Gao, L.; Li, X. Determination of Aluminium Powder Activation in Aluminized Explosives by Spectrometry. Chin. J. Energetic Mater. 2012, 22, 94–98. [Google Scholar]
- Wang, C.; Zhao, S.; Jia, M.; Diao, X.; Dai, Z. Calculation of Detonation Products for Non-ideal Explosive with AP. Chin. J. Energetic Mater. 2014, 22, 235–239. [Google Scholar]
- Schachel, T.; Stork, A.; Schulte-Ladbeck, R.; Vielhaber, T.; Karst, U. Identification and differentiation of commercial and military explosives via high performance liquid chromatography–high resolution mass spectrometry (HPLC-HRMS), X-ray diffractometry (XRD) and X-ray fluorescence spectroscopy (XRF): Towards a forensic substance database on explosives. Forensic Sci. Int. 2020, 308, 110180. [Google Scholar] [PubMed]
- Kahoul, A.; Abassi, A.; Deghfel, B.; Nekkab, M. K-shell fluorescence yields for elements with 6 ≤ Z ≤ 99. Radiat. Phys. Chem. 2011, 80, 369–377. [Google Scholar] [CrossRef]
- Jopson, R.; Mark, H.; Swift, C.; Williamson, M. L-Shell Fluorescence Yields in Elements Between Z = 40 and 51. Phys. Rev. 1964, 136, 69–73. [Google Scholar] [CrossRef]
- Ernst, T.; Berman, T.; Buscaglia, J.; Eckert-Lumsdon, T.; Hanlon, C.; Olsson, K. Signal-to-noise ratios in forensic glass analysis by micro X-ray fluorescence spectrometry. X-Ray Spectrom. 2014, 43, 13–21. [Google Scholar] [CrossRef]
- An, S.; Reza, S.; Norlin, B.; Frjdh, C.; Thungstrm, G. Signal-to-noise ratio optimization in X-ray fluorescence spectrometry for chromium contamination analysis. Talanta 2021, 230, 122236. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Kα1/keV | Kα2/keV | Kβ1/keV | Kβ2/keV | Lα1/keV | Lα2/keV | Lβ1/keV | Lβ2/keV |
|---|---|---|---|---|---|---|---|---|
| Ag | 22.163 | 21.990 | 24.942 | 25.456 | 2.984 | 2.895 | 3.150 | 3.347 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, C.; Xu, H.; Wu, K.; Chen, B.; Dong, P.; Sui, Y.; Chen, H. Robotic-Assisted XRF Testing System for In-Situ Areal Density Measurement of Light-Sensitive Explosive Coatings. Sensors 2025, 25, 3581. https://doi.org/10.3390/s25123581
Xu C, Xu H, Wu K, Chen B, Dong P, Sui Y, Chen H. Robotic-Assisted XRF Testing System for In-Situ Areal Density Measurement of Light-Sensitive Explosive Coatings. Sensors. 2025; 25(12):3581. https://doi.org/10.3390/s25123581
Chicago/Turabian StyleXu, Chang, Haibin Xu, Ke Wu, Bo Chen, Pengju Dong, Yaguang Sui, and Hai Chen. 2025. "Robotic-Assisted XRF Testing System for In-Situ Areal Density Measurement of Light-Sensitive Explosive Coatings" Sensors 25, no. 12: 3581. https://doi.org/10.3390/s25123581
APA StyleXu, C., Xu, H., Wu, K., Chen, B., Dong, P., Sui, Y., & Chen, H. (2025). Robotic-Assisted XRF Testing System for In-Situ Areal Density Measurement of Light-Sensitive Explosive Coatings. Sensors, 25(12), 3581. https://doi.org/10.3390/s25123581