


Gramian Angular Field and Convolutional Neural Networks for Real-Time Multiband Spectrum Sensing in Cognitive Radio Networks

 , ,
, ,  ,
,
Abstract
1. Introduction
2. Theoretical Background
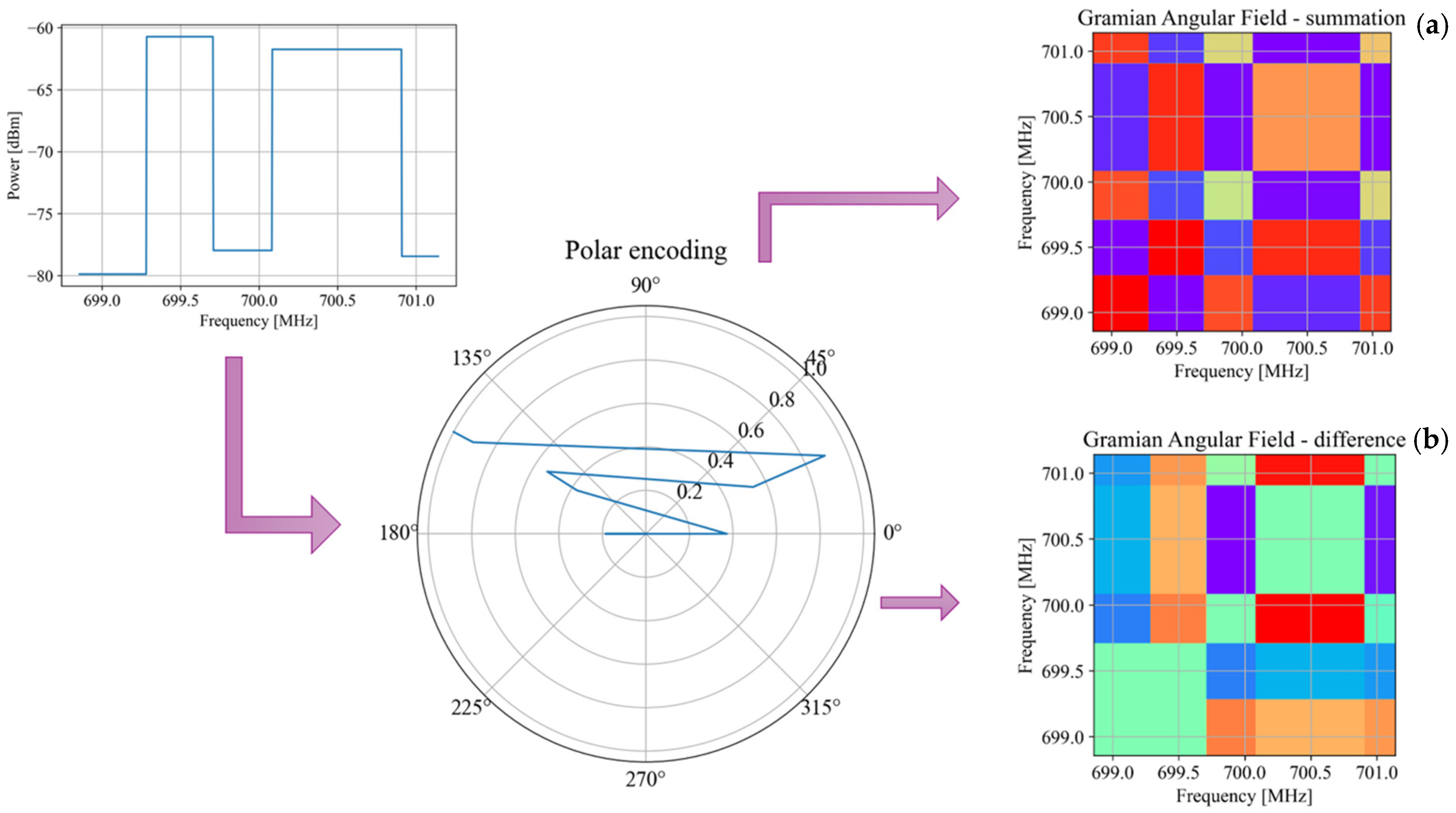
2.1. Gramian Angular Field
2.2. Convolutional Neural Networks
3. Previous Work
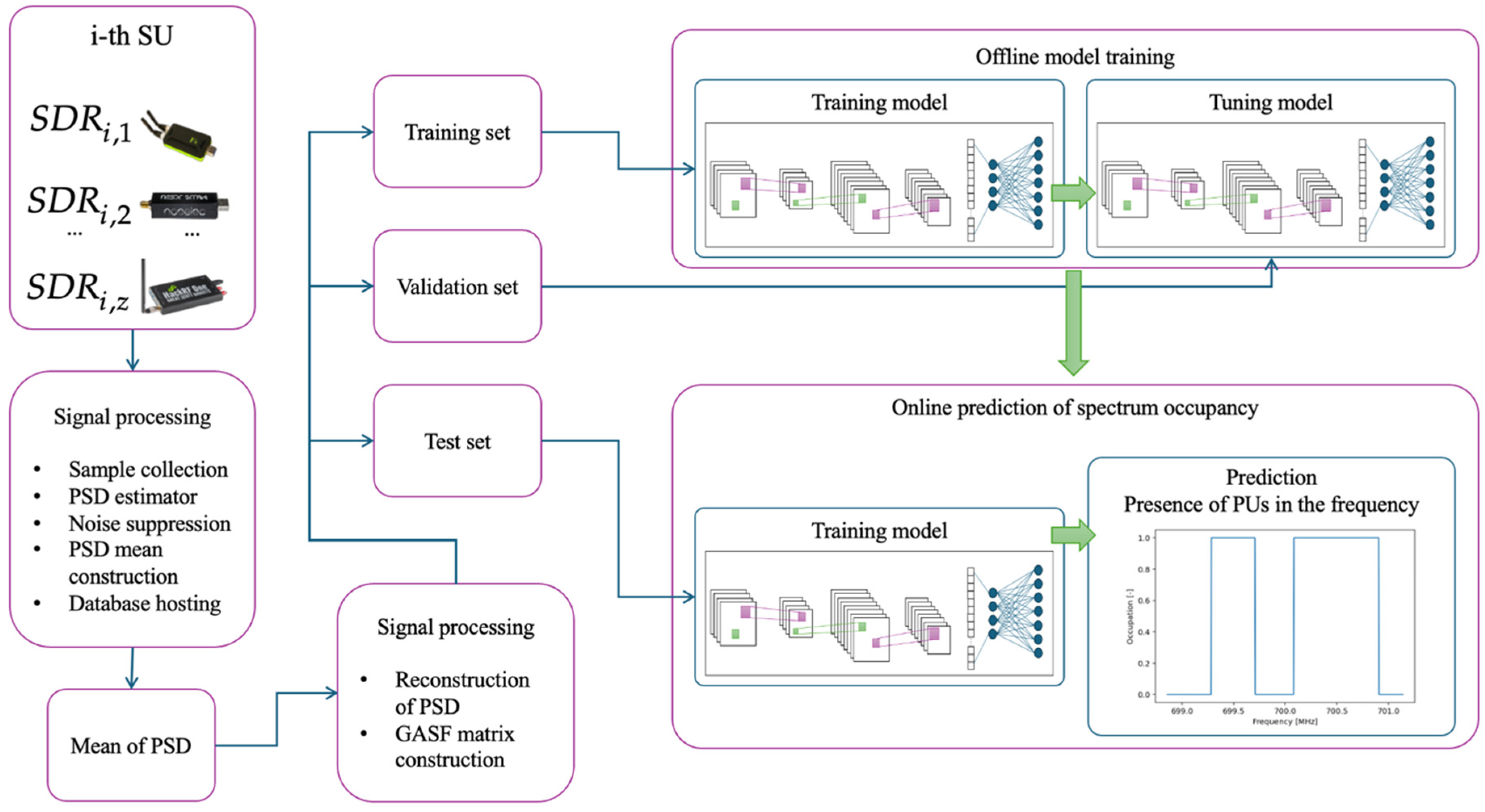
4. Proposed Methodology
| Algorithm 1. Operation of the i-th SU | |
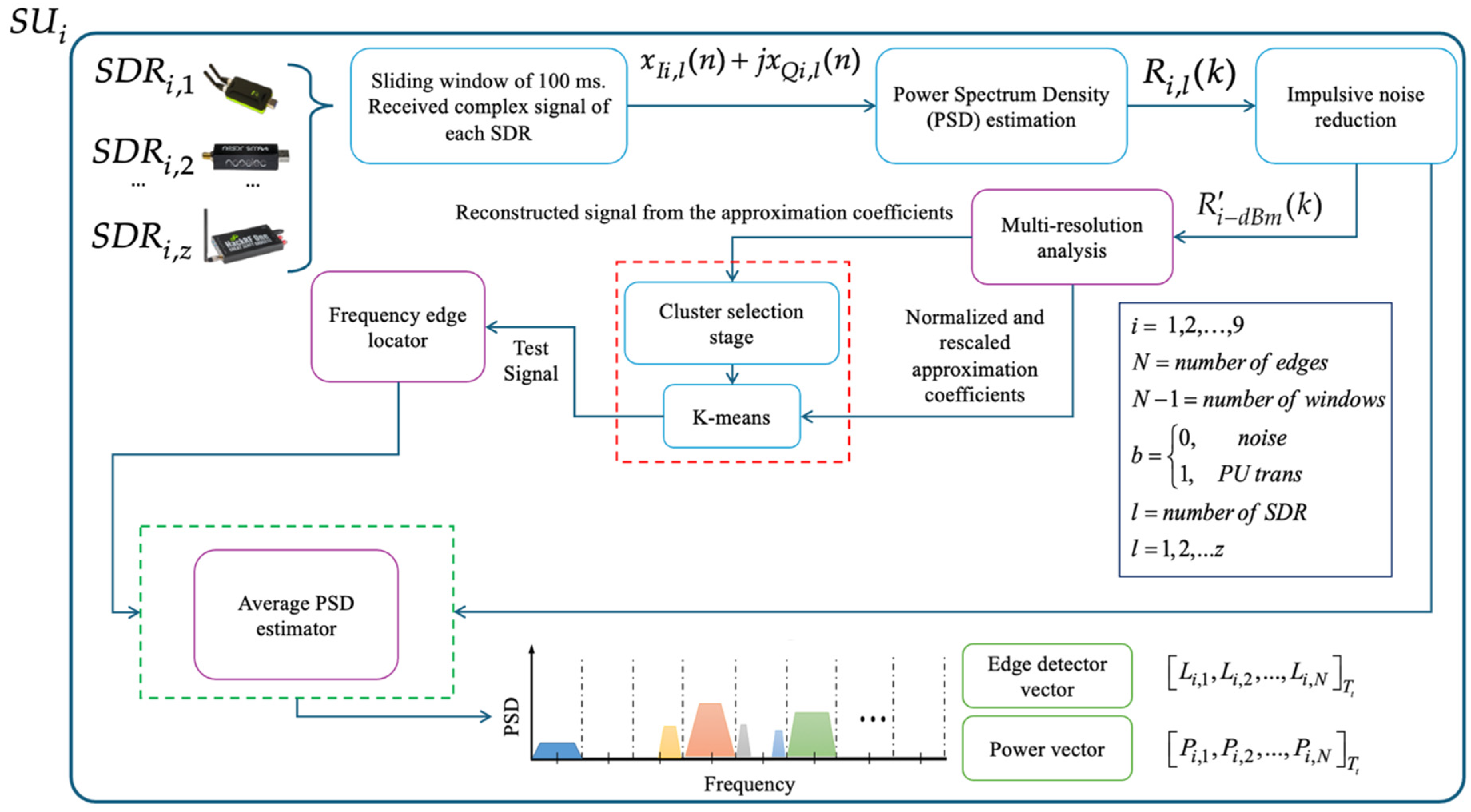
| Step 1.1. | Given the PSD in a dBm scale , an MRA is performed over it. In this way, the approximation coefficients at a certain decomposition level and the detail coefficients at different decomposition levels are obtained. Furthermore, the signal is reconstructed using only the approximation coefficients, thus providing the signal trend. These approximation coefficients are also scaled and normalized for further processing. |
| Step 1.2. | The reconstructed PSD with the MRA, the scaled and normalized approximation coefficients obtained in the previous step, in addition to a cluster selection stage and the K-means algorithm, allow the construction of the test signal. This signal, varying in a binary way, clearly shows state changes occurring in the original PSD. |
| Step 1.3. | Next, the test signal is used to identify the points where a state change occurred. These state changes, representing singularities in the signal, conform to dynamically sized windows (segments of the test signal) for the analysis. |
| Step 1.4. | Since the dynamic windows define frequency boundaries, the mean value of the PSD within each window is computed, forming the average PSD signal. |
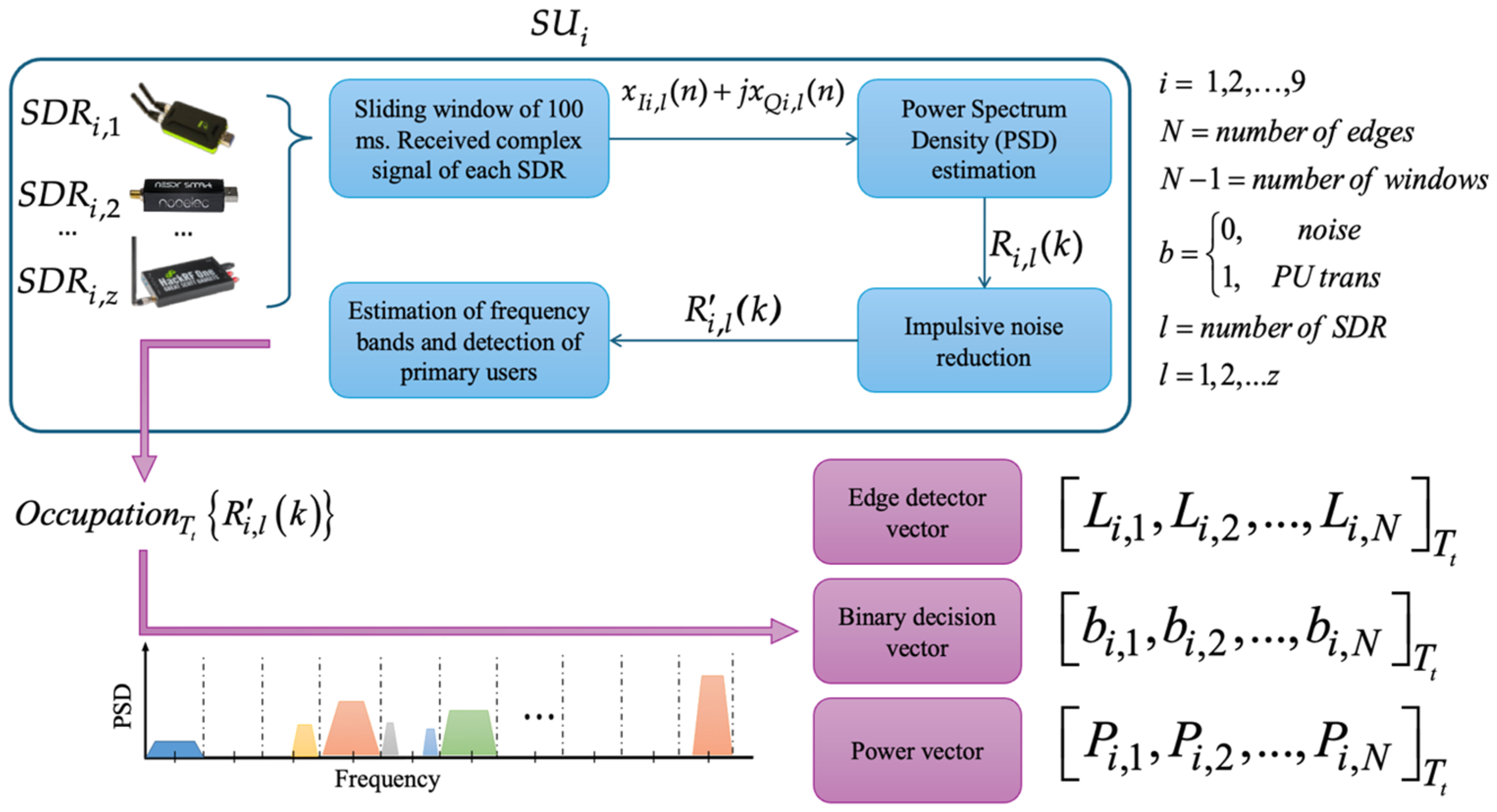
| Step 1.5. | Finally, the information is shared with the central entity via the database. The shared data include the following: The edge detection vector, which indicates the exact points where a change in the signal occurred. The power vector, which represents the average PSD value within each dynamic window defined by the frequency limits. These vectors are stored and managed in a centralized database, which facilitates their access for subsequent analysis and decision making in the spectrum detection system. |
| Algorithm 2. Central Entity Processes | |
| Step 2.1. | Average PSD reconstruction: From the vectors extracted in Algorithm 1, the average PSD, formally denoted as , is reconstructed. Where k represents the frequency index in the spectral domain. |
| Step 2.2. | Signal transformation into a two-dimensional representation: The discrete signal is subjected to a transformation using the GAF method, specifically in its summation variant, generating the GASF matrix. This matrix preserves the spectral information of the signal, allowing the following to be captured:
|
| Step 2.3. | Spectrum occupancy inference using a CNN: The GASF matrix is fed into a CNN, in order to extract spatial and spectral features relevant for spectral occupancy classification. The output of the model is a discrete binary signal of equal length to , where each value indicates the spectral occupancy at a given frequency:
|
5. Experimental Results
5.1. Real-Time Controlled Scenario
5.2. CNN Design
5.2.1. Training Stage
5.2.2. Architecture of the CNN
5.3. System Performance Evaluation
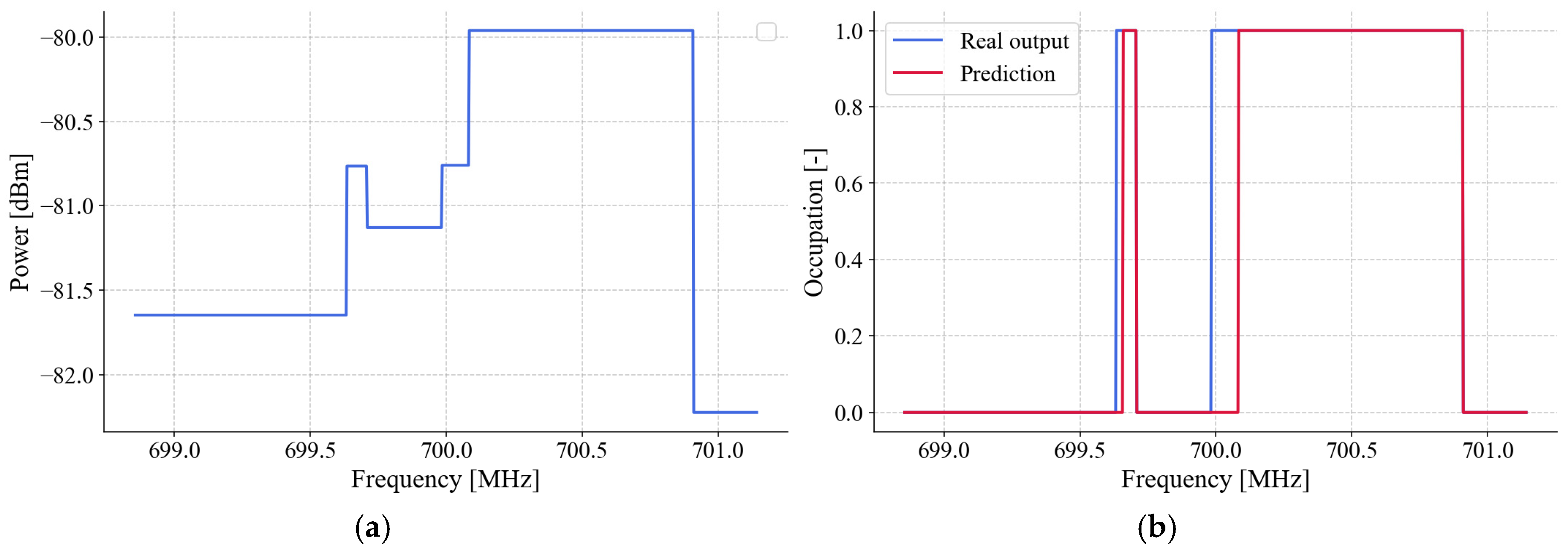
- An analyzed window that corresponds to a PU transmission and that the SU classifies as a PU transmission is considered a true positive (TP) value.
- A frequency window that corresponds to a transmission of the PU that the SU classifies as noise is considered a false negative (FN) value.
- A window that corresponds to noise and that the SU classifies as a PU transmission, is considered a false positive (FP) value. A frequency window that corresponds to noise and that the SU classifies as noise, is considered a true negative (TN) value.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CNN | Convolutional neural network |
| CR | Cognitive radio |
| CRN | Cognitive radio network |
| DNN | Deep neural network |
| DSP | Digital signal processing |
| FN | False negative |
| FP | False positive |
| GADF | Gramian angular difference field |
| GAF | Gramian angular field |
| GASF | Gramian angular summation field |
| LSTM | Long short-term memory |
| MBSS | Multiband spectrum sensing |
| ML | Machine learning |
| MRA | Multiresolution analysis |
| PS | Probability of success |
| PSD | Power spectral density |
| PU | Primary user |
| REM | Radio environment map |
| RNN | Recurrent neural network |
| SDR | Software-defined radio |
| SGD | Stochastic Gradient Descent |
| SNR | Signal-to-noise ratio |
| SU | Secondary user |
| TN | True negative |
| TP | True positive |
References
- Mitola, J.; Maguire, G.Q. Cognitive radio: Making software radios more personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Liu, Y.; Liang, J.; Xiao, N.; Hu, Y.; Hu, M. Dynamic Double Threshold Energy Detection Based on Markov Model in Cognitive Radio. J. Electron. Inf. Technol. 2016, 38, 2590–2597. [Google Scholar]
- Srinu, S.; Sabat, S.L.; Udgata, S.K. Wideband spectrum sensing based on energy detection for Cognitive Radio network. In Proceedings of the 2011 World Congress on Information and Communication Technologies, Mumbai, India, 11–14 December 2011; pp. 651–656. [Google Scholar]
- Urkowitz, H. Energy detection of unknown deterministic signals. Proc. IEEE 1967, 55, 523–531. [Google Scholar] [CrossRef]
- Sobron, I.; Diniz, P.S.R.; Martins, W.A.; Velez, M. Energy Detection Technique for Adaptive Spectrum Sensing. IEEE Trans. Commun. 2015, 63, 617–627. [Google Scholar] [CrossRef]
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a convolutional neural network. In Proceedings of the 2017 International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–23 August 2017; pp. 1–6. [Google Scholar]
- Abdelbaset, S.; Kasem, H.; Khalaf, A.; Hussein, A.; Kabeel, A. Deep Learning-Based Spectrum Sensing for Cognitive Radio Applications. Sensors 2024, 24, 7907. [Google Scholar] [CrossRef]
- Zheng, K.; Wang, J.; Chen, A.; Sun, W.; Liu, X.; Liu, J. Spectrum utilization improvement for multi-channel EH-CRN with spectrum sensing. IET Commun. 2024, 18, 1927–1942. [Google Scholar] [CrossRef]
- Ibadik, I.N.; Ashari, A.F.; Ariananda, D.D.; Dewanto, W. Frequency Domain Energy Detection for Multiband Spectrum Sensing in Cognitive Radio System. In Proceedings of the 14th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 18–19 October 2022; pp. 7–12. [Google Scholar]
- Xiong, T.; Yao, Y.; Ren, Y.; Li, Z. Multiband Spectrum Sensing in Cognitive Radio Networks With Secondary User Hardware Limitation: Random and Adaptive Spectrum Sensing Strategies. IEEE Trans. Wirel. Commun. 2018, 17, 3018–3029. [Google Scholar] [CrossRef]
- Syed, S.N.; Lazaridis, P.I.; Khan, F.A.; Ahmed, Q.Z.; Hafeez, M.; Ivanov, A. Deep Neural Networks for Spectrum Sensing: A Review. IEEE Access 2023, 11, 89591–89615. [Google Scholar] [CrossRef]
- Lu, L.; Li, X.; Wang, G.; Ni, W. Multiband Cooperative Spectrum Sensing Meets Vehicular Network: Relying on CNN-LSTM Approach. Wirel. Commun. Mob. Comput. 2023, 2023, 4352786. [Google Scholar] [CrossRef]
- Zhang, J.; He, Z.; Rui, H.; Xu, X. Multiband Joint Spectrum Sensing via Covariance Matrix-Aware Convolutional Neural Network. IEEE Commun. Lett. 2022, 26, 1578–1582. [Google Scholar] [CrossRef]
- Wang, K.; Chen, Y.; Bo, D.; Wang, S. A novel multi-user collaborative cognitive radio spectrum sensing model: Based on a CNN-LSTM model. PLoS ONE 2025, 20, 0316291. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Li, X.; Zheng, K.; Liu, J. AoI minimization of ambient backscatter-assisted EH-CRN with cooperative spectrum sensing. Comput. Netw. 2024, 245, 110389. [Google Scholar] [CrossRef]
- Pan, G.; Yau, D.K.Y.; Zhou, B.; Wu, Q. Deep Learning for Spectrum Prediction in Cognitive Radio Networks: State-of-the-Art, New Opportunities, and Challenges. arXiv 2024, arXiv:2412.09849. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Y.; Quek, T.Q.S. RIS-Enhanced Cognitive Integrated Sensing and Communication: Joint Beamforming and Spectrum Sensing. arXiv 2024, arXiv:2402.06879. [Google Scholar] [CrossRef]
- Yang, C.; Chen, Z.; Yang, C. Sensor Classification Using Convolutional Neural Network by Encoding Multivariate Time Series as Two-Dimensional Colored Images. Sensors 2019, 20, 168. [Google Scholar] [CrossRef]
- Fu, Y.; He, Z. Radio Frequency Signal-Based Drone Classification with Frequency Domain Gramian Angular Field and Convolutional Neural Network. Drones 2024, 8, 511. [Google Scholar] [CrossRef]
- Xu, H.; Li, J.; Yuan, H.; Liu, Q.; Fan, S.; Li, T. Human Activity Recognition Based on Gramian Angular Field and Deep Convolutional Neural Network. IEEE Access 2020, 8, 199393–199405. [Google Scholar] [CrossRef]
- Elmir, Y.; Himeur, Y.; Amira, A. ECG classification using Deep CNN and Gramian Angular Field. In Proceedings of the Ninth International Conference on Big Data Computing Service and Applications (BigDataService), Athens, Greece, 17–20 July 2023; pp. 137–141. [Google Scholar]
- Yao, J.; Jin, M.; Wu, T.; Elkashlan, M.; Yuen, C. FAS-Driven Spectrum Sensing for Cognitive Radio Networks. arXiv 2024, arXiv:2411.08383. [Google Scholar] [CrossRef]
- Kaur, M.; Singh, R.; Kumar, S. Ensemble Classification-Based Spectrum Sensing Using Support Vector Machine for CRN. arXiv 2024, arXiv:2412.09831. [Google Scholar]
- Wang, Z.; Oates, T. Imaging Time-Series to Improve Classification and Imputation. arXiv 2015, arXiv:1506.00327. [Google Scholar]
- Oh, S.; Kim, Y.; Hong, J. Urban Traffic Flow Prediction System Using a Multifactor Pattern Recognition Model. IEEE Trans. Intell. Transport. Syst. 2015, 16, 2744–2755. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Wang, W.; Yang, Y. Development of convolutional neural network and its application in image classification: A survey. Opt. Eng. 2019, 58, 1. [Google Scholar] [CrossRef]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R.; Lopez-Benitez, M. Cooperative Multiband Spectrum Sensing Using Radio Environment Maps and Neural Networks. Sensors 2023, 23, 5209. [Google Scholar] [CrossRef] [PubMed]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R. Real-Time Implementation of Multiband Spectrum Sensing Using SDR Technology. Sensors 2021, 21, 3506. [Google Scholar] [CrossRef] [PubMed]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R. Multiband Spectrum Sensing Based on the Sample Entropy. Entropy 2022, 24, 411. [Google Scholar] [CrossRef]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R.; Ruiz-Boqué, S. Machine Learning Techniques Applied to Multiband Spectrum Sensing in Cognitive Radios. Sensors 2019, 19, 4715. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Device | Fc Tx [MHz] | Fc Rx [MHz] | Bandwidth [MHz] | Location Coordinate (X,Y) [m] |
|---|---|---|---|---|---|
| PU1 | Mini LimeSDR | 699.5 | - | 0.5 | (0, 0) |
| PU2 | HackRF ONE | 700.5 | - | 1 | (0, 0) |
| SU1 | RTL-SDR | - | 700 | 2.4 | (−1.5, 0) |
| SU2 | RTL-SDR | - | 700 | 2.4 | (0, 1.5) |
| SU3 | RTL-SDR | - | 700 | 2.4 | (1.5, 0) |
| SU4 | RTL-SDR | - | 700 | 2.4 | (0, −1.5) |
| SU5 | RTL-SDR | - | 700 | 2.4 | (−3, 2) |
| SU6 | RTL-SDR | - | 700 | 2.4 | (3, 3.5) |
| SU7 | RTL-SDR | - | 700 | 2.4 | (3, −2.5) |
| SU8 | RTL-SDR | - | 700 | 2.4 | (−3, −2.5) |
| SU9 | RTL-SDR | - | 700 | 2.4 | (0,0) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molina-Tenorio, Y.; Prieto-Guerrero, A.; Rodriguez-Colina, E.; Vásquez-Toledo, L.A.; Olvera-Guerrero, O.A. Gramian Angular Field and Convolutional Neural Networks for Real-Time Multiband Spectrum Sensing in Cognitive Radio Networks. Sensors 2025, 25, 3580. https://doi.org/10.3390/s25123580
Molina-Tenorio Y, Prieto-Guerrero A, Rodriguez-Colina E, Vásquez-Toledo LA, Olvera-Guerrero OA. Gramian Angular Field and Convolutional Neural Networks for Real-Time Multiband Spectrum Sensing in Cognitive Radio Networks. Sensors. 2025; 25(12):3580. https://doi.org/10.3390/s25123580
Chicago/Turabian StyleMolina-Tenorio, Yanqueleth, Alfonso Prieto-Guerrero, Enrique Rodriguez-Colina, Luis Alberto Vásquez-Toledo, and Omar Alejandro Olvera-Guerrero. 2025. "Gramian Angular Field and Convolutional Neural Networks for Real-Time Multiband Spectrum Sensing in Cognitive Radio Networks" Sensors 25, no. 12: 3580. https://doi.org/10.3390/s25123580
APA StyleMolina-Tenorio, Y., Prieto-Guerrero, A., Rodriguez-Colina, E., Vásquez-Toledo, L. A., & Olvera-Guerrero, O. A. (2025). Gramian Angular Field and Convolutional Neural Networks for Real-Time Multiband Spectrum Sensing in Cognitive Radio Networks. Sensors, 25(12), 3580. https://doi.org/10.3390/s25123580