
Design and Analysis of Differential Compensated Eddy Current Displacement Sensors


Abstract
1. Introduction
2. Theoretical Basis
2.1. Structural Design of DCECDS
2.2. Mathematical Model of DCECDS
2.2.1. Principle of Eddy Current Testing
2.2.2. Mathematical Model of DCECDS
2.2.3. DCECDS Output Zeroing Principle
3. Multi-Coil Finite Element Model of Sensor Probe
3.1. The Geometric Structure of Simulation Model
3.2. Parameter Design of Simulation Model
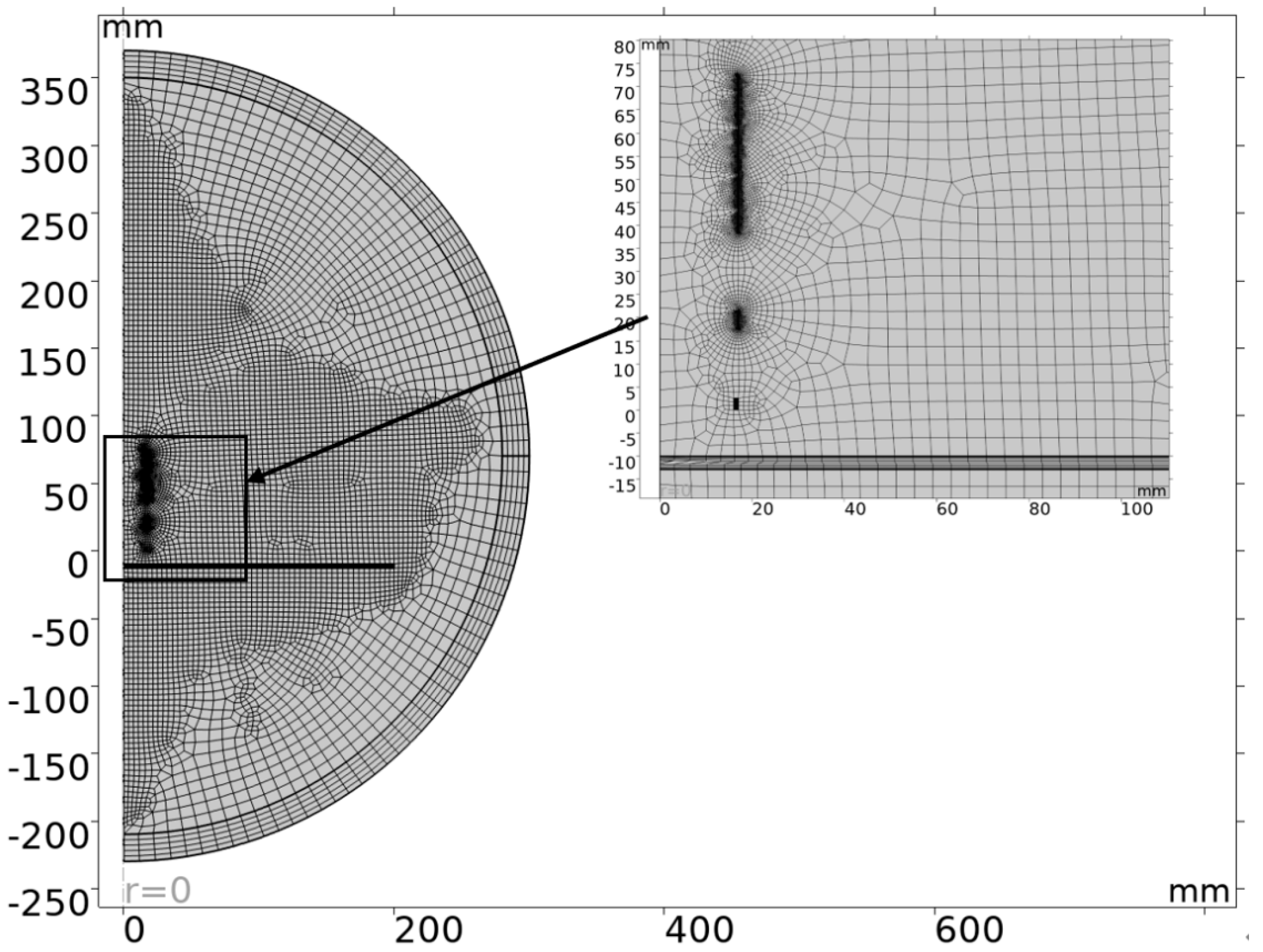
3.3. Grid Division
4. Analysis of Simulation Results
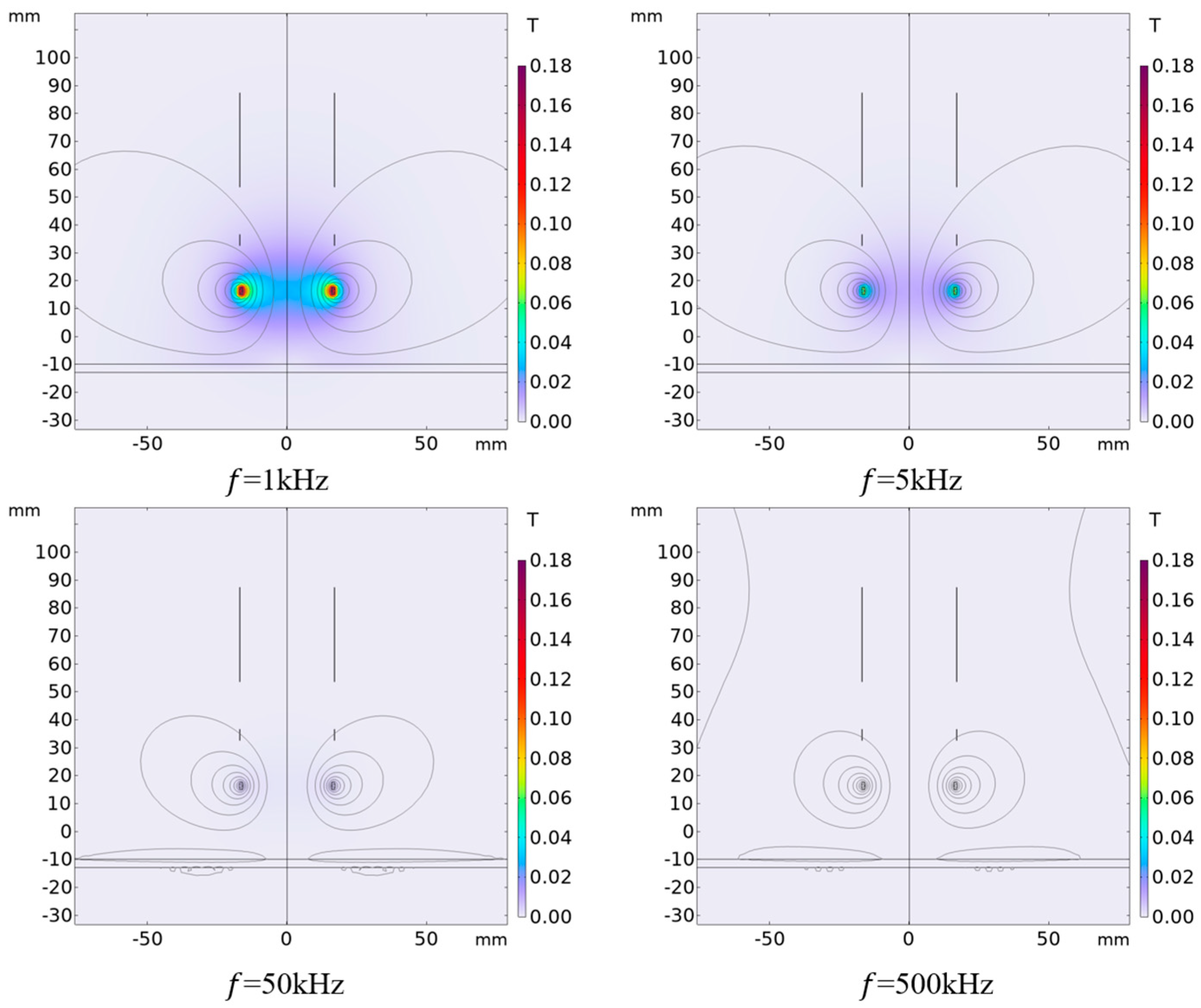
4.1. Influence of Different Excitation Frequencies on Output Results
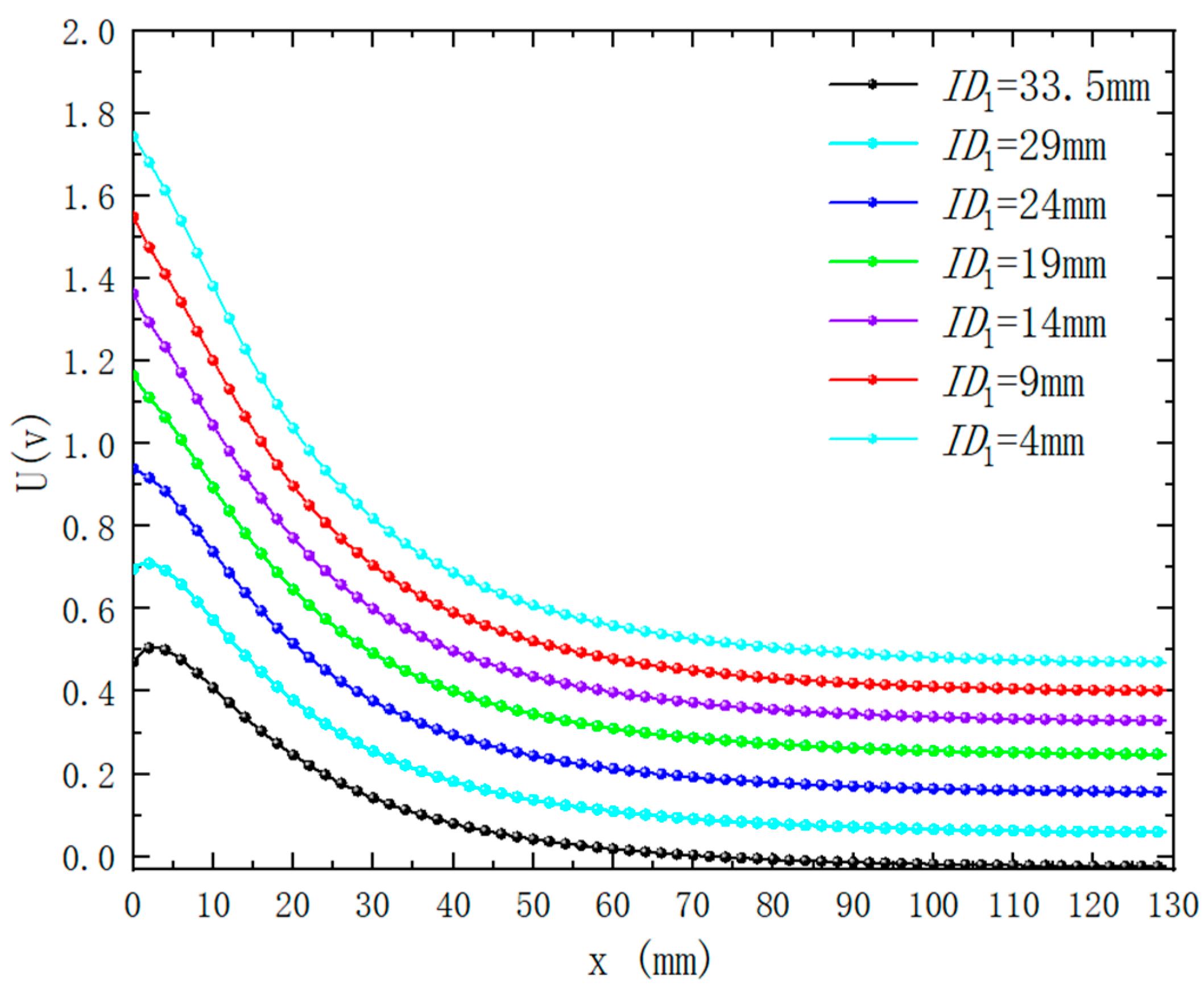
4.2. Influence of Different Excitation Coil Inner Diameters on Output Results
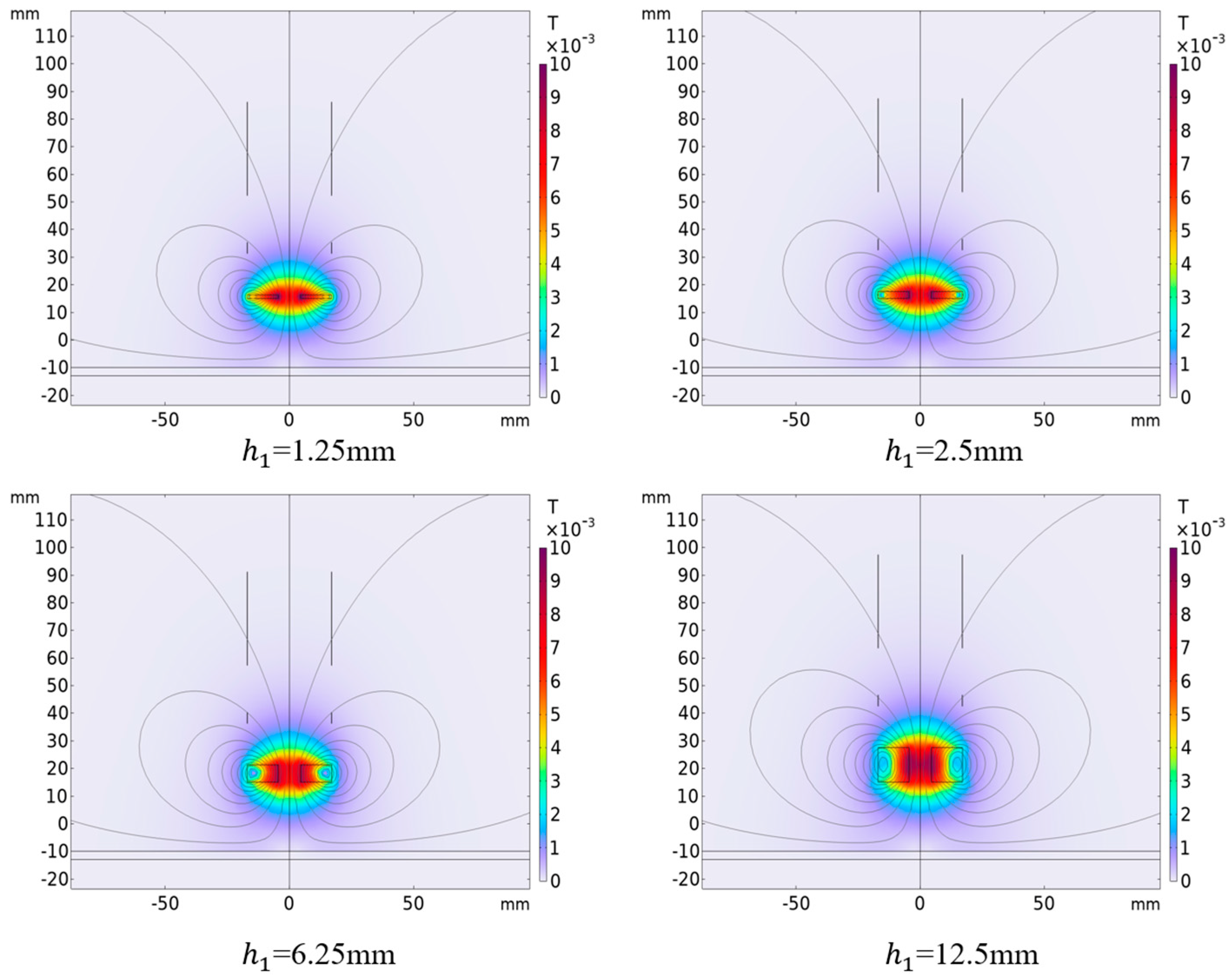
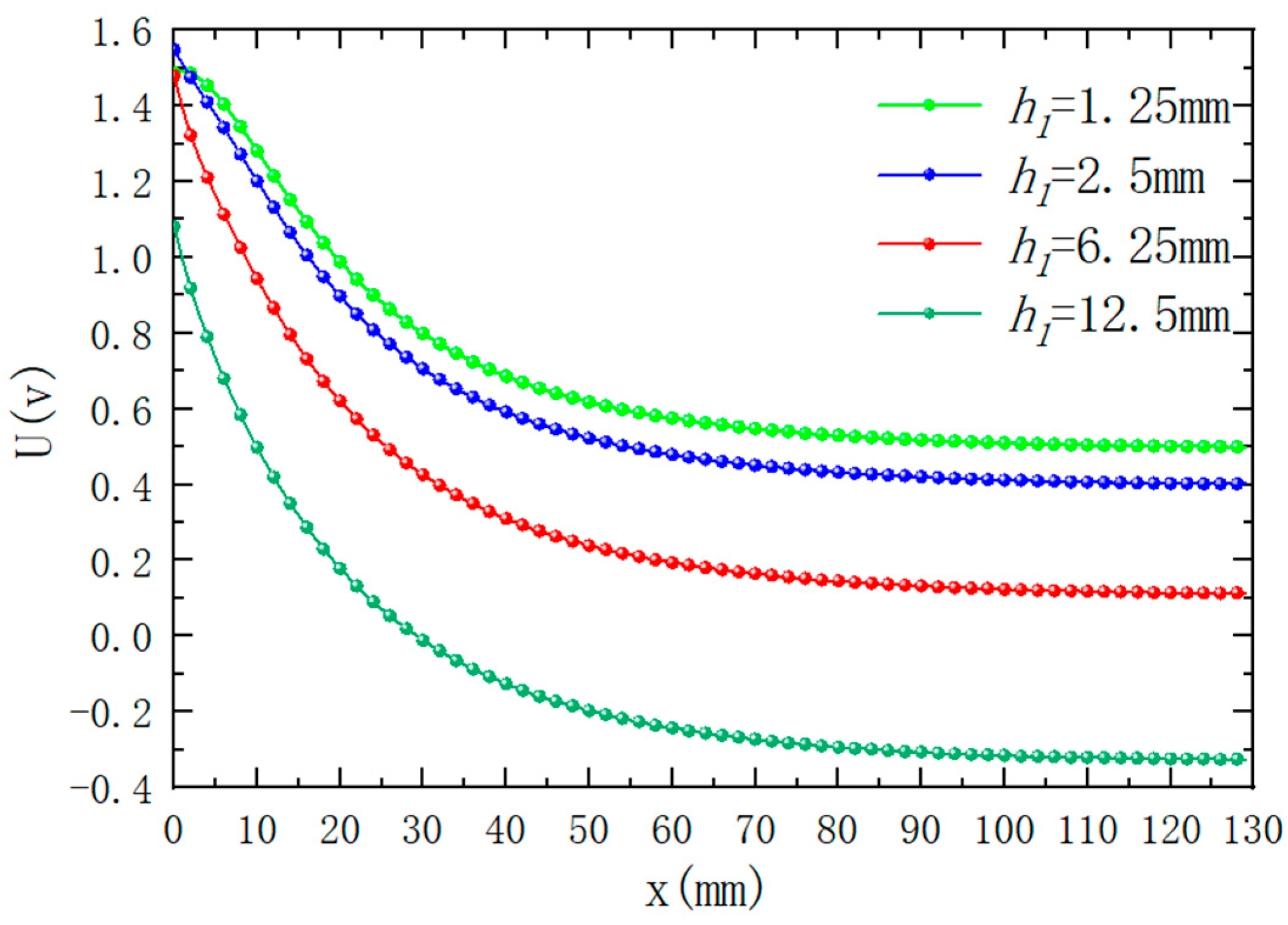
4.3. Influence of Excitation Coil Height on Output Result
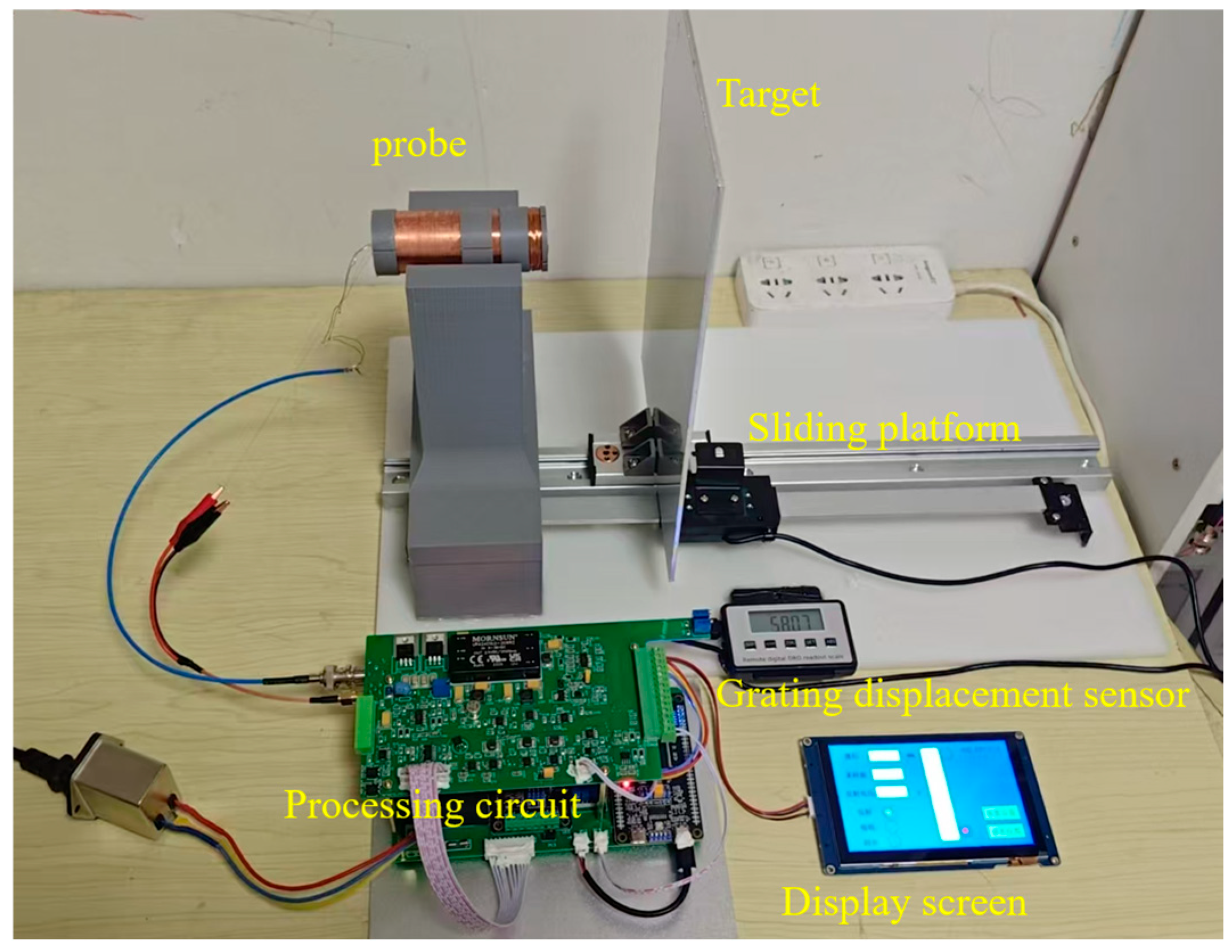
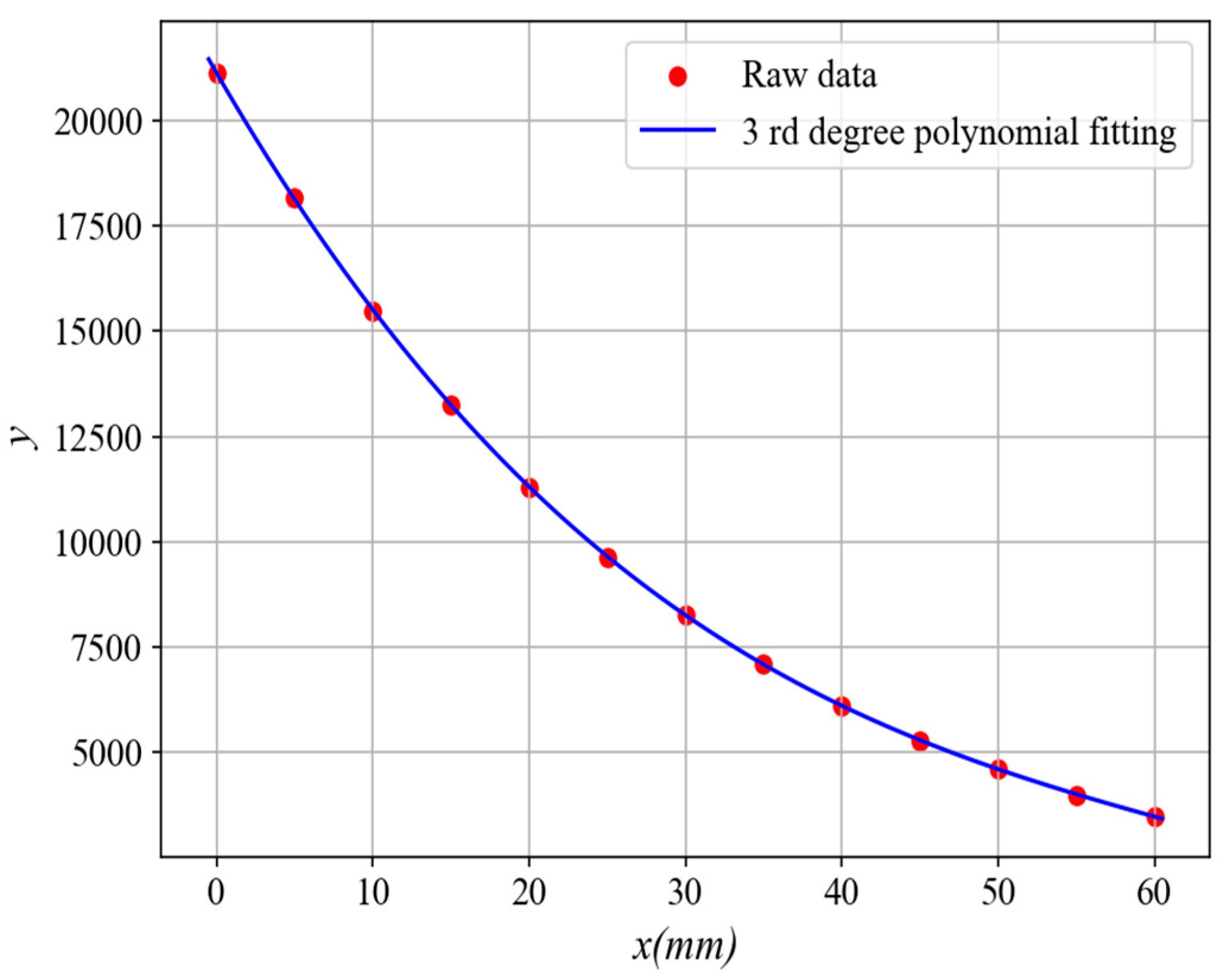
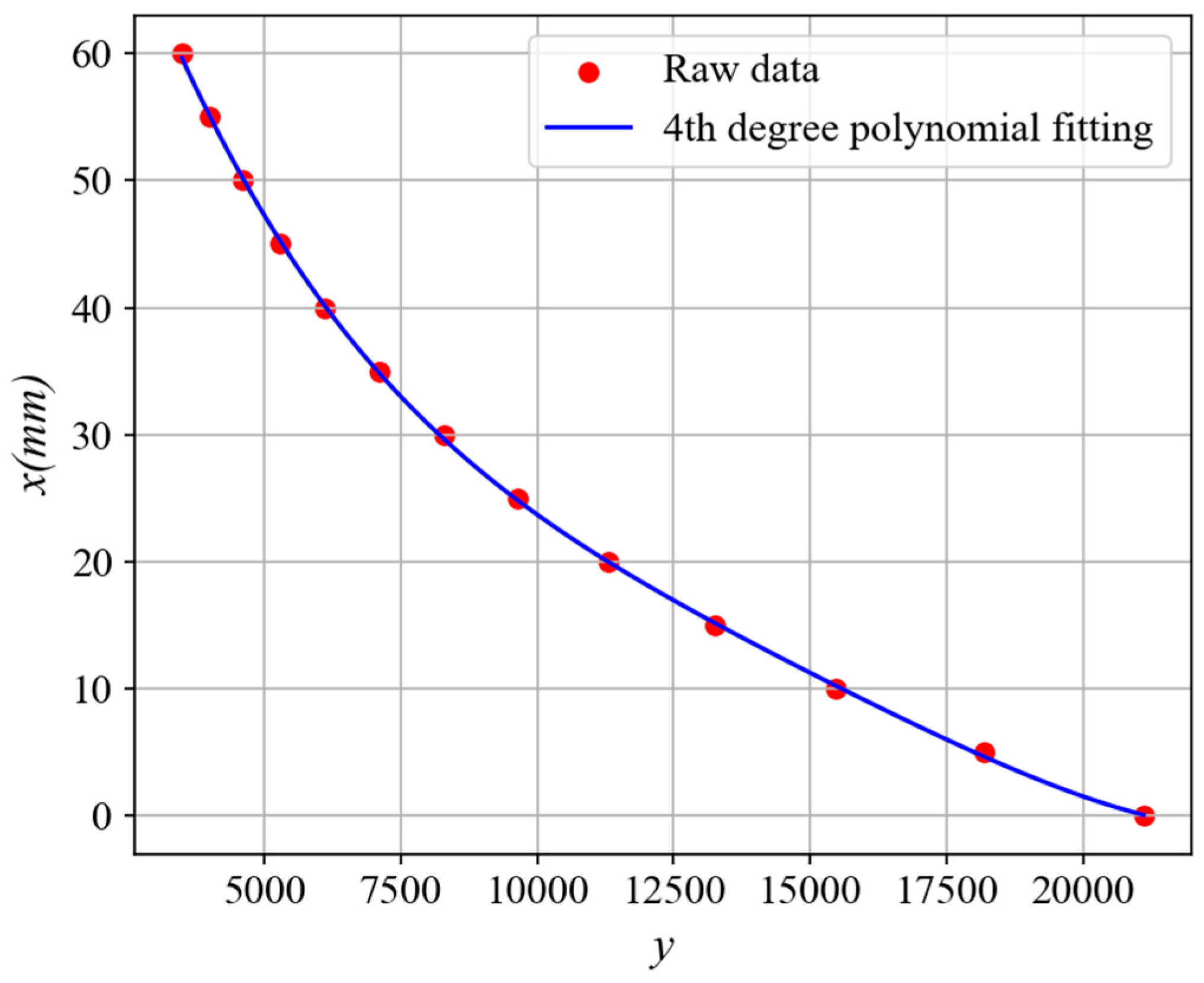
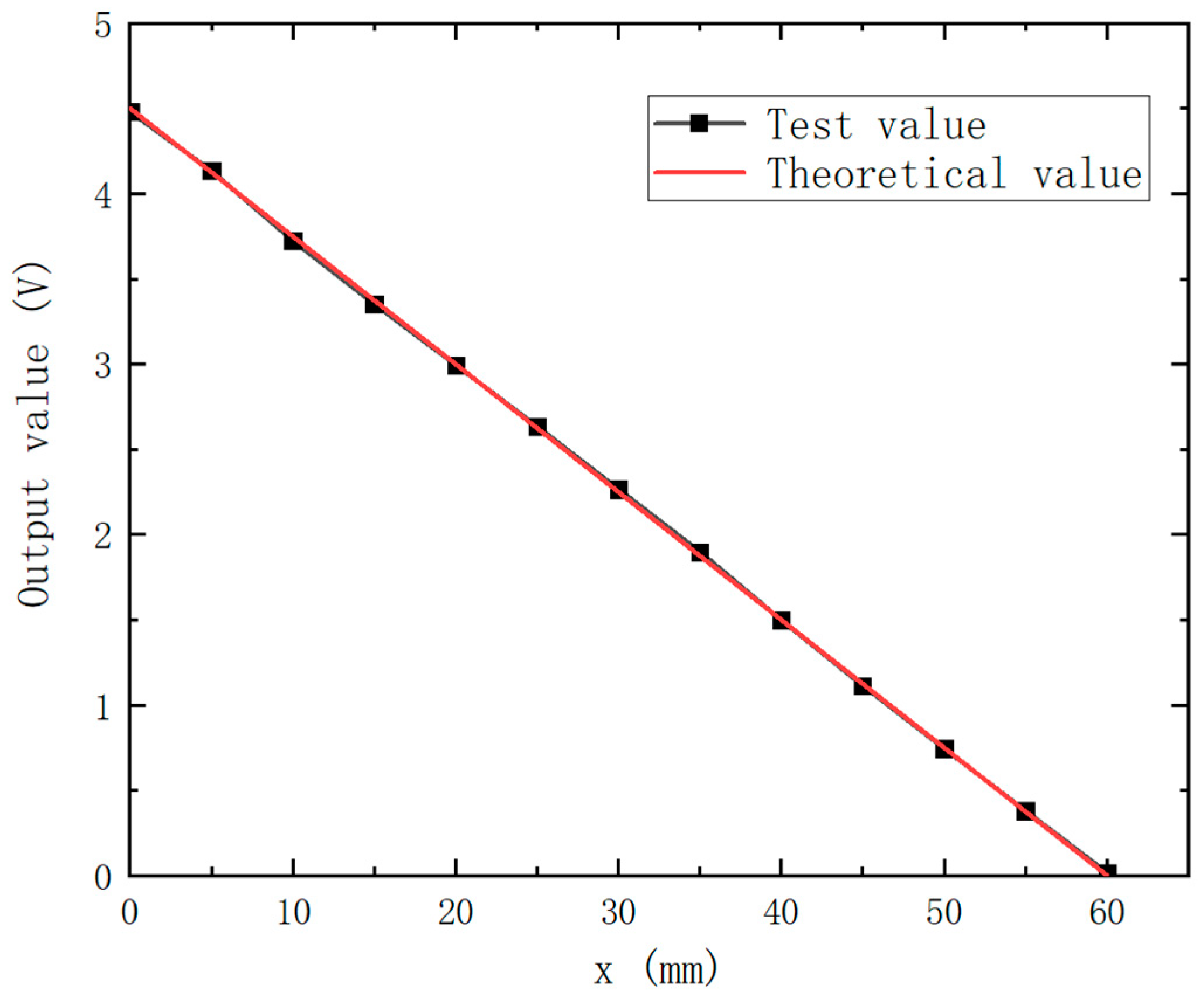
5. Experiment and Analysis
6. Conclusions
- Improving the frequency of the excitation signal can effectively increase the sensitivity of the sensor output signal, but when the frequency of the excitation signal increases to more than 50 kHz, the sensitivity of the sensor output signal is basically unchanged in the near detection, and the sensitivity is slightly reduced in the remote detection.
- Under the premise that the outer diameter and height of the control coil are unchanged, the inner diameter of the excitation coil becomes smaller, and the sensitivity of the sensor output signal becomes higher. The inner diameter of the coil can be controlled to improve the linearity of the output signal when the sensor is measured at close distance.
- The eddy current sensor designed with differential compensation coil structure can reach the target detection range of about 1.76 times the outer diameter of the excitation coil, which is about 3.5 times higher than that of the conventional eddy current displacement sensor.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Alessandro, B.; Marco, L.; Gabriele, S. Effects of the Target on the Performance of an Ultra-Low Power Eddy Current Displacement Sensor for Industrial Application. Electronics 2020, 9, 1287. [Google Scholar] [CrossRef]
- Lee, K.M.; Hao, B.J.; Li, M.; Bai, K. Multiparameter Eddy-Current Sensor Design for Conductivity Estimation and Simultaneous Distance and Thickness Measurements. IEEE Trans. Ind. Inform. 2019, 15, 1647–1657. [Google Scholar] [CrossRef]
- Zhao, G.E.; Huang, Y.H.; Zhang, W.W.; Wang, C.X.; Chen, J.X. Advances in high-precision displacement and thickness measurement based on eddy current sensors: A review. Measurement 2024, 243, 116410. [Google Scholar] [CrossRef]
- Zhao, G.F.; Ying, J.; Wu, L.; Feng, Z.H. Eddy current displacement sensor with ultrahigh resolution obtained through the noise suppression of excitation voltage. Sens. Actuators A Phys. 2019, 299, 111622. [Google Scholar] [CrossRef]
- Tong, P.; Wu, L.; Chen, Y.; Su, R.; Wu, Y.L. A Novel Eddy Current Sensor for Displacement Measurement with High Accuracy and Long Range. IEEE Sens. J. 2023, 23, 1. [Google Scholar] [CrossRef]
- Wang, H.B.; Feng, Z.H. Ultrastable and highly sensitive eddy current displacement sensor using self-temperature compensation. Sens. Actuators A Phys. 2023, 20223, 362–368. [Google Scholar] [CrossRef]
- Xu, L.J.; Wang, Y.L.; Chen, Q.S. High-precision Long-displacement Sensor Based on Axial Eddy Current Effect. Electron. Meas. Technol. 2024, 47, 131–136. [Google Scholar] [CrossRef]
- Li, Y.C.; Li, R.C.; Yang, J.R.; Xu, J.K.; Yu, X.D. Effect of Excitation Signal on Double-Coil Inductive Displacement Transducer. Sensors 2023, 23, 3780. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.C.; Li, R.C.; Yang, J.R.; Xu, J.K.; Yu, X.D. The Effect of Frequency on Double-Coil Inductive Displacement Transducer. IEEE Trans. Instrum. Meas. 2024, 73, 1–15. [Google Scholar] [CrossRef]
- Xu, J.K.; Li, Y.C.; Li, R.C.; Yang, J.R.; Yu, X.D. Effect of the Coil Excitation Method on the Performance of a Dual-Coil Inductive Displacement Transducer. Sensors 2023, 23, 3703. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.N.; Liu, Q.; Lü, C.F.; Mao, Y.M.; Tao, W.; Zhao, H. Parameter Optimization and Precision Enhancement of Dual-Coil Eddy Current Sensor. J. Shanghai Jiao Tong Univ. (Sci.) 2023, 28, 596–603. [Google Scholar] [CrossRef]
- Guo, W.C.; Chen, C.X.; Ma, T.H. Simulation About Influence of Coil Parameters on Performance of Large Radius Eddy Current Sensor. J. Ord. Equip. Eng. 2021, 42, 235–239+252. [Google Scholar]
- Sun, M.L.; Zhou, J.X.; Dong, B.T.; Zheng, S.Q. Driver Circuit Improvement of Eddy Current Sensor in Displacement Measurement of High-Speed Rotor. IEEE Sens. J. 2021, 21, 7776–7783. [Google Scholar] [CrossRef]
- Vyroubal, D. Eddy-Current Displacement Transducer With Extended Linear Range and Automatic Tuning. IEEE Trans. Instrum. Meas. 2009, 58, 3221–3231. [Google Scholar] [CrossRef]
- Xu, C.M.; Yuan, S.; Liu, M.J. Design and analysis of an eddy current displacement sensor with extended linear range. Sens. Actuators A Phys. 2024, 368, 115100. [Google Scholar] [CrossRef]
- Cao, Z.; Huang, Y.K.; Peng, F.; Dong, J.N. Driver Circuit Design for a New Eddy Current Sensor in Displacement Measurement of Active Magnetic Bearing Systems. IEEE Sens. J. 2022, 22, 16945–16951. [Google Scholar] [CrossRef]
- Wu, M.; Yuan, J.; Wang, K.D.; Lei, H.M. Optimal Design of Large-range Eddy Current Sensor Probe Based on Multi-objective Optimization Algorithm. Instrum. Tech. Sens. 2024, 5, 1–6, 11. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Argument | Value | Unit | Explanation |
|---|---|---|---|
| 34 | mm | outside diameter of excitation coil | |
| <34 | mm | inner diameter of excitation coil | |
| >0 | mm | height of excitation coil | |
| 15 | mm | coil spacing | |
| d | 200 | mm | target diameter |
| t | 3 | mm | target thickness |
| f | >1 | kHz | excitation frequency |
| x | >0 | mm | detection distance |
| 34 | mm | outside diameter of detecting coil | |
| 33.9 | mm | inner diameter of detecting coil | |
| 4.7 | mm | height of detecting coil | |
| 34 | mm | outside diameter of compensating coil | |
| 33.9 | mm | inner diameter of compensating coil | |
| 35 | mm | height of compensating coil | |
| 17 | mm | coil spacing |
| Argument | Value | Unit | Explanation |
|---|---|---|---|
| 34 | mm | outside diameter of excitation coil | |
| 9 | mm | inner diameter of excitation coil | |
| 6.25 | mm | height of excitation coil | |
| f | 50 | kHz | excitation frequency |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bian, Y.; Zhang, K.; Ma, T. Design and Analysis of Differential Compensated Eddy Current Displacement Sensors. Sensors 2025, 25, 3578. https://doi.org/10.3390/s25123578
Bian Y, Zhang K, Ma T. Design and Analysis of Differential Compensated Eddy Current Displacement Sensors. Sensors. 2025; 25(12):3578. https://doi.org/10.3390/s25123578
Chicago/Turabian StyleBian, Yuliang, Kun Zhang, and Tiehua Ma. 2025. "Design and Analysis of Differential Compensated Eddy Current Displacement Sensors" Sensors 25, no. 12: 3578. https://doi.org/10.3390/s25123578
APA StyleBian, Y., Zhang, K., & Ma, T. (2025). Design and Analysis of Differential Compensated Eddy Current Displacement Sensors. Sensors, 25(12), 3578. https://doi.org/10.3390/s25123578