
Smart Underwater Sensor Network GPRS Architecture for Marine Environments

Abstract
1. Introduction
2. Related Work
2.1. Underwater Sensor Networks
2.2. UWSN Marine Systems
2.3. Wireless Communication in the Ocean
2.4. Characteristics of Each Mode of Wireless Communication
- A mobile sensor node for communication in marine environments is analyzed. The development of this type of technology provides connectivity in maritime zones, enabling monitoring of ocean and marine species health, fishing and tourist boat tracking, and tourist monitoring in activities considered to be of intermediate risk.
- A GPRS communication architecture is developed from a node to a ground base. As shown in the introduction and related works, there are works with other types of communication technology, such as RF, optical, and ultrasonic signals. The main intention of using this type of link is to start a communication and data transmission system that is friendly to the environment, that is, one that does not interfere with communication between species. In addition, there is no need to purchase more technology because cellular communication is currently available at low cost.
- The architecture of mobile nodes is designed for communication in mesh networks in marine environments. Proposing a type of connectivity that links all nodes, as in this work, even presenting a negative scenario in which any node is not available, connectivity prevails between them. Unlike what is available in related works, communication is unidirectional, and in a case of occlusion, there will be no communication.
- A high-performance computing architecture with low energy consumption is established. From the elements selected for the architecture of the proposed node, characteristics such as low energy consumption and easy-to-understand and configure architecture are considered. As justified further on in the text. The remainder of this paper is organized as follows: Section 2 presents a review of the works related to the research topic. Section 3 presents the architecture proposed in this work. Section 4 presents the tests and results. Section 5 presents the discussion and conclusions.
3. Materials and Methods
- (1)
- Water resistance: sensor nodes in a marine monitoring system require relatively high levels of water resistance, as they are constantly exposed to saturated conditions.
- (2)
- Robustness: A marine monitoring system requires high robustness since the marine environment includes waves, sea currents, tides, typhoons, ship effects, etc., and is dynamic and complex; thus, nodes are constantly moving.
- (3)
- Power consumption: power consumption is often high due to the long distance of transmission and various dynamic obstacles in the marine environment.
- (4)
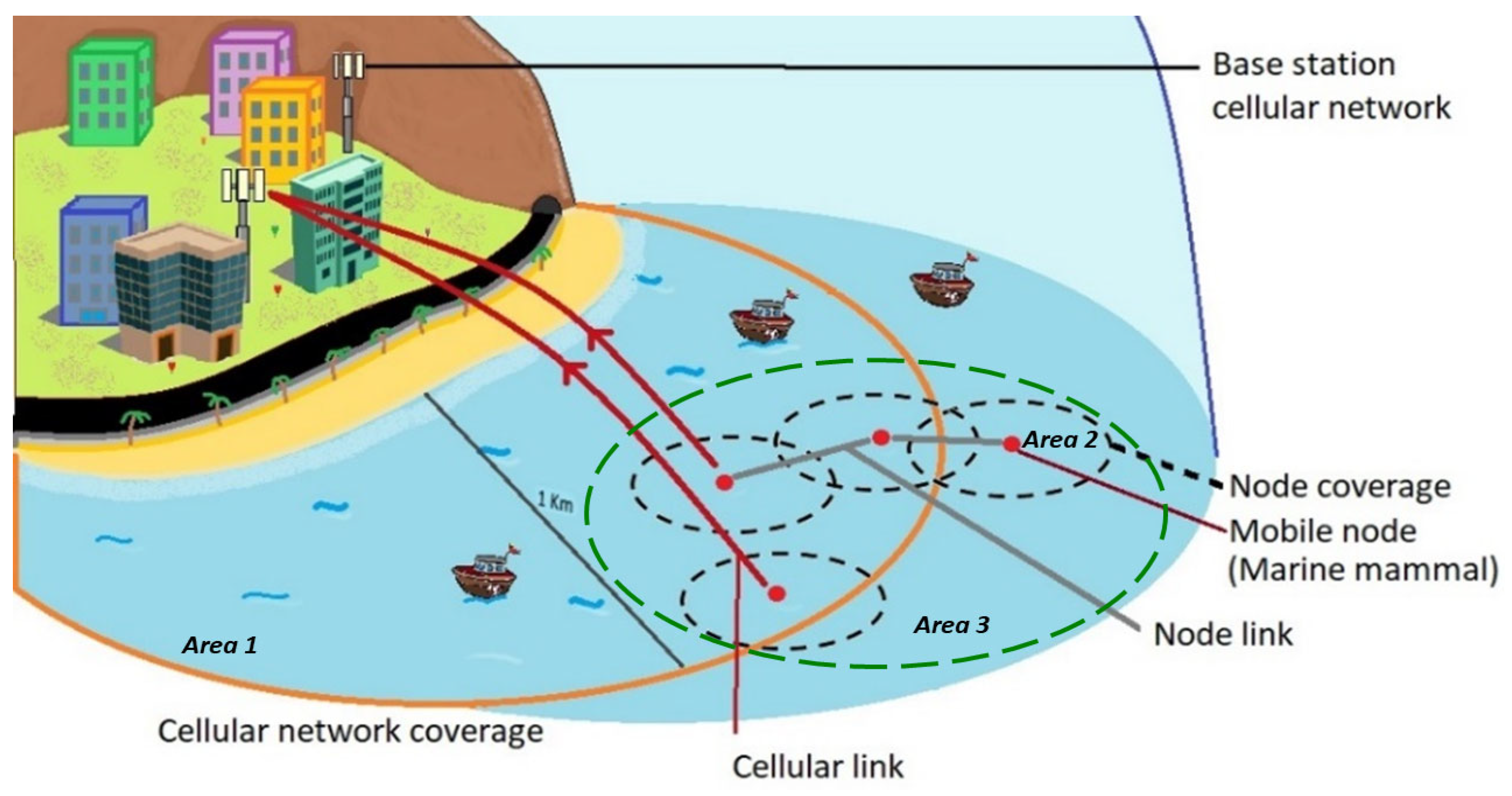
- There are several other issues that may be encountered, such as difficulty in deploying and maintaining nodes, the need for mooring devices and buoys, sensor coverage issues, and potential vandalism. In this work we consider points 2 and 3 in the analysis. Therefore, considering the above factors and the issues noted by Felenbam et al. [1], according to the types of architectures for UWSNs, the proposed architecture is a 2D-UWSN with a special exception, as our architecture does not require node clusters, and each node can act on its own. In Figure 1, we show the proposed implementation of the architecture.
3.1. Sensor Network Architecture
- The connection is maintained despite intermittent wireless communication.
- The wireless receiver is characterized by high sensitivity.
- There is a balance in the autonomy-portability relationship.
Wireless Cards
- Power supply: 3.3 V.
- Operating bands: 800, 850, 900, 1900, 2100.
- Sensitivity: −109 dBm with a BER < 2.04% (bits in error).
- Supports protocols: FTP, TCP/UDP.
- Operating modes: Normal, Sleep.
- IP support: IPv4, IPv6.
- Size: 2.6 × 1.6 × 0.3 (cm).
- Transmission power: 33 dBm.
3.2. Wireless Link
3.3. Embedded Computational Architecture
4. Tests and Results
4.1. Testing of the Architecture
4.2. Marine Wireless Communication Channel
4.3. Hardware Testing
4.4. Prototype and Hardware Testing
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater Sensor Network Applications: A Comprehensive Survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef]
- Xu, G.; Shen, W.; Wang, X. Applications of Wireless Sensor Networks in Marine Environment Monitoring: A Survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef] [PubMed]
- Kum, B.C.; Shin, D.H.; Lee, J.H.; Jang, M.T.S.; Lee, S.Y.; Cho, J.H. Monitoring Applications for Multifunctional Unmanned Surface Vehicles in Marine Coastal Environments. J. Coast. Res. 2018, 85, 1381–1385. [Google Scholar] [CrossRef]
- Mittal, S.; Ramkumar, K.R. Different Communication Technologies and Challenges for implementing Under Water Sensor Network. In Proceedings of the 2021 12th International Conference on Computing Communication and Networking Technologies (ICCCNT), Kharagpur, India, 6–8 July 2021; pp. 1–16. [Google Scholar]
- Hollinger, G.A.; Choudhary, S.; Qarabaqi, P.; Murphy, C.; Mitra, U.; Sukhatme, G.S.; Stojanovic, M.; Singh, H.; Hover, F. Underwater Data Collection Using Robotic Sensor Networks. IEEE J. Sel. Areas Commun. 2012, 30, 899–911. [Google Scholar] [CrossRef]
- Garcia, M.S.; Carvalho, D.; Zlydareva, O.; Muldoon, C.; Masterson, B.F.; O’Grady, M.J.; Meijer, W.G.; O’Sullivan, J.J.; O’Hare, G.M. An Agent-Based Wireless Sensor Network for Water Quality Data Collection. In Proceedings of the Ubiquitous Computing and Ambient Intelligence: 6th International Conference, UCAmI 2021, Vitoria-Gasteiz, Spain, 3–5 December 2012; pp. 454–461. [Google Scholar]
- Trevathan, J.; Johnstone, R.; Chiffings, T.; Atkinson, I.; Bergmann, N.; Read, W.; Theiss, S.; Myers, T.; Stevens, T. SEMAT—The Next Generation of Inexpensive Marine Environmental Monitoring and Measurement Systems. Sensors 2012, 12, 9711–9748. [Google Scholar] [CrossRef] [PubMed]
- Lu, H.; Wang, D.; Li, Y.; Li, J.; Li, X.; Kim, H.; Serikawa, S.; Humar, I. CONet: A Cognitive Ocean Network. IEEE Wirel. Commun. 2019, 26, 90–96. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.D.; Zakharov, Y.; Mourya, R.; Petillot, Y.R.; Gibney, T.; Dragone, M.; Sherlock, B.; Neasham, J.A.; Tsimenidis, C.C.; et al. Robust TDA-MAC for Practical Underwater Sensor Network Deployment: Lessons from USMART Sea Trials. In Proceedings of the 13th International Conference on Underwater Networks & Systems, Shenzhen, China, 3–5 December 2018; pp. 1–8. [Google Scholar]
- Wang, J.; Shi, W.; Xu, L.; Zhou, L.; Niu, Q. Design of optical-acoustic hybrid underwater wireless sensor network. J. Netw. Comput. Appl. 2017, 92, 59–67. [Google Scholar] [CrossRef]
- Copernicus Marine Service. Available online: https://marine.copernicus.eu/ (accessed on 26 March 2025).
- Maher, S.M.; Ali, Z.M.; Mahmoud, H.H.; Abdellatif, S.O.; Abdellatif, M.M. Performance of RF underwater communications operating at 433 MHz and 2.4 GHz. In Proceedings of the 2019 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 2–4 February 2019; pp. 334–339. [Google Scholar]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater Wireless Sensor Networks: A Survey on Enabling Technologies, Localization Protocols, and internet of Underwater Things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Awan, K.M.; Shah, P.A.; Iqbal, K.; Gillani, S.; Ahmad, W.; Nam, Y. Underwater Wireless Sensor Networks: A Review of Recent Issues and Challenges. Wirel. Commun. Mob. Computing. 2019, 2019, 6470359. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Zhu, S.; Chen, X.; Liu, X.; Zhang, G.; Tian, P. Recent progress in and perspectives of underwater Wireless optical communication. Prog. Quantum Electron. 2020, 73, 100274. [Google Scholar] [CrossRef]
- Shen, C.; Guo, Y.; Oubei, H.M.; Ng, T.K.; Liu, G.; Park, K.H.; Ho, K.T.; Alouini, M.S.; Ooi, B.S. 20-meter underwater wireless optical communication link with 1.5 Gbps data rate. Opt. Express 2016, 24, 25502–25509. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Chen, Y.; Wu, M.; Yang, Y. A survey of routing protocols for underwater wireless sensor networks. IEEE Commun. Surv. Tutor. 2021, 23, 137–160. [Google Scholar] [CrossRef]
- SEMAR. Available online: https://www.semar.gob.mx/meteorologia/ESCALA%20DOUGLAS.htm (accessed on 8 January 2025).
- Google Maps. Available online: https://www.google.com/maps/@21.8757944,-94.8289021,6z?entry=ttu (accessed on 8 January 2025).
- López, B.M.; Sierra, A.P. Circulación del golfo de México inducida por mareas, viento y la corriente de Yucatán. Cienc. Mar. 1998, 24, 65–93. [Google Scholar]
- Sistema Meteorológico Nacional. Available online: https://smn.conagua.gob.mx/tools/GUI/modelos/sipromat/index.php (accessed on 8 January 2025).
- Lee, W.C.Y. Mobile Communications Engineering: Theory and Applications; McGraw-Hill: New York, NY, USA, 1982. [Google Scholar]
- Goldsmith, A. Wireless Communications; Cambridge Press: Cambridge, UK, 2005. [Google Scholar]
- Millero, F.J.; Feistel, R.; Wright, D.G.; McDougall, T.J. The composition of Standard Seawater and the definition of the Reference-Composition Salinity Scale. Deep Sea Res. Part I Oceanogr. Res. Papers. 2008, 55, 50–72. [Google Scholar] [CrossRef]
- Qureshi, U.M.; Shaikh, F.K.; Aziz, Z.; Shah, S.M.Z.S.; Sheikh, A.A.; Felemban, E.; Qaisar, S.B. RF path and absorption loss estimation for underwater wireless sensor networks in different water environments. Sensors 2016, 16, 890. [Google Scholar] [CrossRef] [PubMed]
- Hecht, E. Optics; Pearson: England, UK, 2017. [Google Scholar]
- Sadiku, M. Elements of Electromagnetics; Oxford University Press: New York, NY, USA, 2007. [Google Scholar]
- Schwartrz, M. Mobile Wireless Communication; Cambridge Press: Cambridge, UK, 2004. [Google Scholar]
- Bachynski, M.; Kingsmill, M. Effect of obstacle profile on knife-edge diffraction. IRE Trans. Antennas Propag. 1962, 10, 201–205. [Google Scholar] [CrossRef]
- Ezenugu, I.A.; Edokpolor, H.O.; Chikwado, U. Determination of single knife edge equivalent parameters for double knife edge diffraction loss by Deygout method. Math. Softw. Eng. 2017, 3, 201–208. [Google Scholar]
- Ament, W.S. Toward a theory of reflection by a rough surface. IRE 1953, 41, 142–146. [Google Scholar] [CrossRef]
- Instituto Federal de Telecomunicaciones. Available online: https://www.ift.org.mx/sites/default/files/contenidogeneral/concesionespermisos-y-autorizaciones/ley-federal-de-telecomunicaciones.pdf (accessed on 8 January 2025).
- Randrianarisaina, A.; Pasquier, O.; Chargé, P. Energy consumption modeling of smart nodes with a function approach. In Proceedings of the 2014 Conference on Design and Architectures for Signal and Image Processing, Madird, Spain, 8–14 October 2014; pp. 1–6. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | MKR Zero | MSP430F5529 LaunchPad | NUCLEO-L432KC | Curiosity PIC32MZ EF | Quark D2000 |
|---|---|---|---|---|---|
| Availability | Yes | Yes | Yes | Yes | Yes |
| Processing bus | 32 bits | 16 bits | 32 bits | 32 bits | 32 bits |
| Processor | ARM cortex M0+ | MSP430F5529 | ARM Cortex M4 | PIC32MZ2048EFM100 | Quark D2000 |
| Manufacturer | ATMEL | Texas Instrument | STMicroelectronics | Microchip | Intel |
| Velocity | 48–96 MHz | 25 MHz | 8 MHz–188 MHz | 50–200 MHz | 32 MHz |
| Consumption | 3.3 V @ 350 mA | 1.8–3.6 V @ 10.5 mA | 3.3 V @ 144 mA | 2.2–3.6 V @ 200 mA | 3.3 V @ 84 mA |
| Serial protocols | SPI, UART, I2C | SPI, UART, I2C, USB | SPI, UART, I2C, USB | SPI, UART, I2C, USB | SPI, UART, I2C, USB |
| Price | 21.9 (USD) | 12.99 (USD) | 10.32 (USD) | 47 (USD) | 14.95 (USD) |
| Number | Activity | Current Consumption (mA) | Power Consumption (mW) |
|---|---|---|---|
| 1 | GPS module power on | 97.5 ± 3 | 321.7 ± 10 |
| 2 | Validating geographic location | 97.5 ± 3 | 321.7 ± 10 |
| 3 | 433 MHz module power-up | 110.4 ± 2 | 364.3 ± 6 |
| 4 | Transmission of information between nodes | 122.3 ± 3 | 403.59 ± 10 |
| 5 | Node waiting for a message | 20.1 ± 1 | 66.33 ± 3 |
| 6 | Internet connection via a cellular link | 575 ± 5 | 1897.5 ±17 |
| Work | This Paper | [7] | [8] | [9] | [11] |
|---|---|---|---|---|---|
| Propagation method | RF | RF | Optical | Acoustic | RF |
| Transmission frequency | 433 MHz, 850 MHz and 1900 MHz | 2.4 GHz | No data, it is just a proposal | 24–28 kHz | 433 MHz and 2.4 GHz |
| Effective transmission distance (m) | 100 to 1000 | 500 to 1700 | No data, it is just a proposal | No data | 0.4 |
| Energy consumption analysis | YES | NO | No data, it is just a proposal | No analysis | NO |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carvajal-Gámez, B.E.; Cedeño-Antunez, U.; Pallares-Calvo, A.E. Smart Underwater Sensor Network GPRS Architecture for Marine Environments. Sensors 2025, 25, 3439. https://doi.org/10.3390/s25113439
Carvajal-Gámez BE, Cedeño-Antunez U, Pallares-Calvo AE. Smart Underwater Sensor Network GPRS Architecture for Marine Environments. Sensors. 2025; 25(11):3439. https://doi.org/10.3390/s25113439
Chicago/Turabian StyleCarvajal-Gámez, Blanca Esther, Uriel Cedeño-Antunez, and Abigail Elizabeth Pallares-Calvo. 2025. "Smart Underwater Sensor Network GPRS Architecture for Marine Environments" Sensors 25, no. 11: 3439. https://doi.org/10.3390/s25113439
APA StyleCarvajal-Gámez, B. E., Cedeño-Antunez, U., & Pallares-Calvo, A. E. (2025). Smart Underwater Sensor Network GPRS Architecture for Marine Environments. Sensors, 25(11), 3439. https://doi.org/10.3390/s25113439