
Indoor mmWave Radar Ghost Suppression: Trajectory-Guided Spatiotemporal Point Cloud Learning



Abstract
1. Introduction
- A robust tracking framework that associates detections across frames while maintaining trajectory consistency, even in challenging scenarios with closely spaced targets and ghosts.
- An innovative trajectory feature aggregation network that combines PointNet-style point feature extraction with temporal CNN processing, enabling effective learning of spatiotemporal patterns.
- A comprehensive system architecture that integrates preliminary segmentation, trajectory tracking, feature aggregation, and feature broadcasting to achieve state-of-the- art performance.
2. Basic Theory of Radar and Ghosts
2.1. FMCW Radar
2.2. Ghost Model
3. Methods
3.1. Inter-Frame Trajectory Tracking
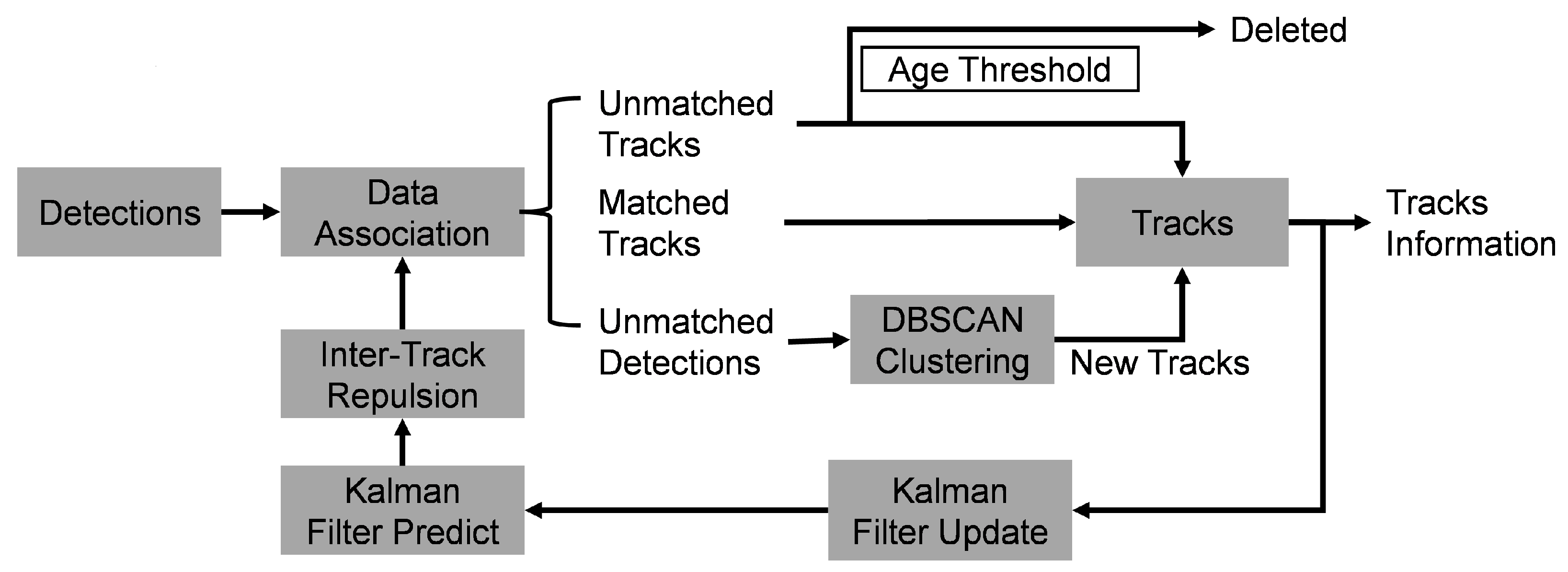
- Assume that N targets are detected by radar in each frame, and each target has C features. These detections are associated with existing trajectories. During association, each detection searches for the closest trajectory in spatial distance. If the distance between them is less than the threshold , they are associated with each other.
- Each detection can be associated with at most one trajectory, but each trajectory may be associated with multiple detections. These associated detections are added to the trajectory’s FIFO and used to update its Kalman filter state.
- If a trajectory is not associated with any detection, a null value is added to the trajectory’s FIFO; if no detection is associated with the trajectory for consecutive frames, the trajectory is deleted.
- For detections not associated with any trajectory, DBSCAN clustering [34] is performed (, ). Each cluster creates a new trajectory; the points in the cluster are added to the trajectory’s FIFO and used to initialize the Kalman state. Setting allows each unassociated detection to potentially form its own cluster, ensuring that no detection is discarded and every point can be assigned to a trajectory for subsequent processing.
- After all detections have been associated, each trajectory performs a Kalman prediction step to update its state and uncertainty for the next frame.
- Since one human body is often detected as multiple points, to avoid two trajectories tracking the same person, a repulsion mechanism is introduced. If the distance between two trajectories is less than , they are forcibly repelled by adjusting their positions to make the distance equal to . Here, the position refers to the position in the Kalman state. The repulsion is asymmetric, depending on the size of the Kalman state variance. A trajectory with higher uncertainty (i.e., a larger trace of the covariance matrix) is adjusted more, reflecting its lower reliability:where is the position of track i, and is that of a nearby track j; denotes the trace of the covariance matrix.
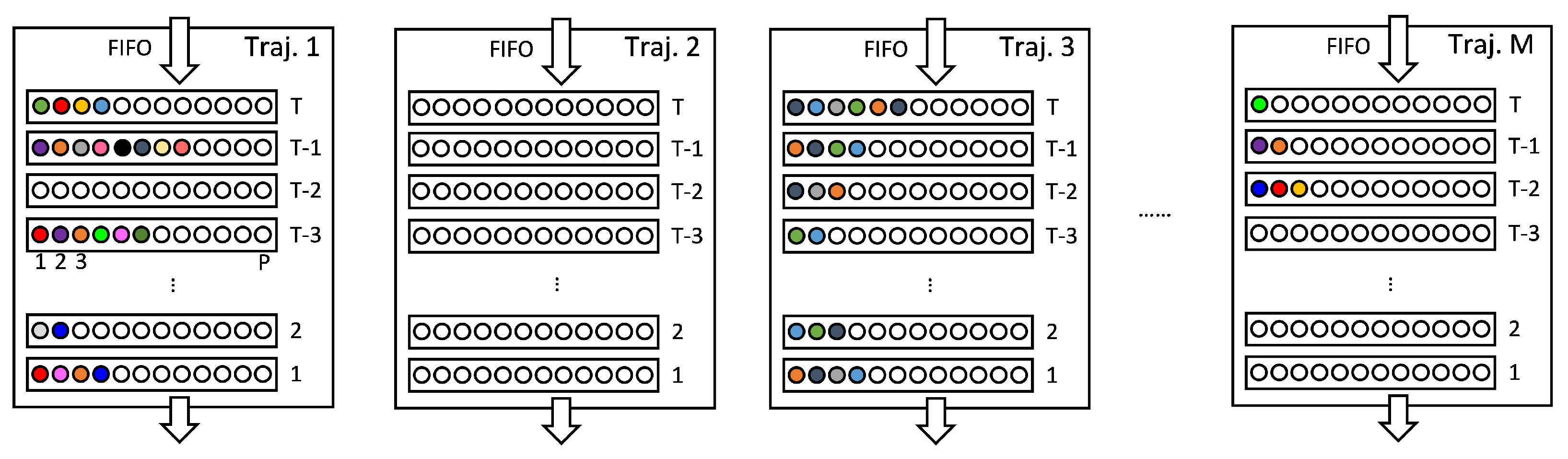
- After the above steps, the tracking module completes all operations for the current frame. Finally, the contents of each trajectory’s FIFO are output. In this way, an input point cloud of the shape is transformed into trajectory data of the shape , where M denotes the number of trajectories, T denotes the number of historical frames stored in each trajectory, P denotes the number of associated points per trajectory per frame, and C denotes the number of features per point.
3.2. Preliminary Point Cloud Segmentation
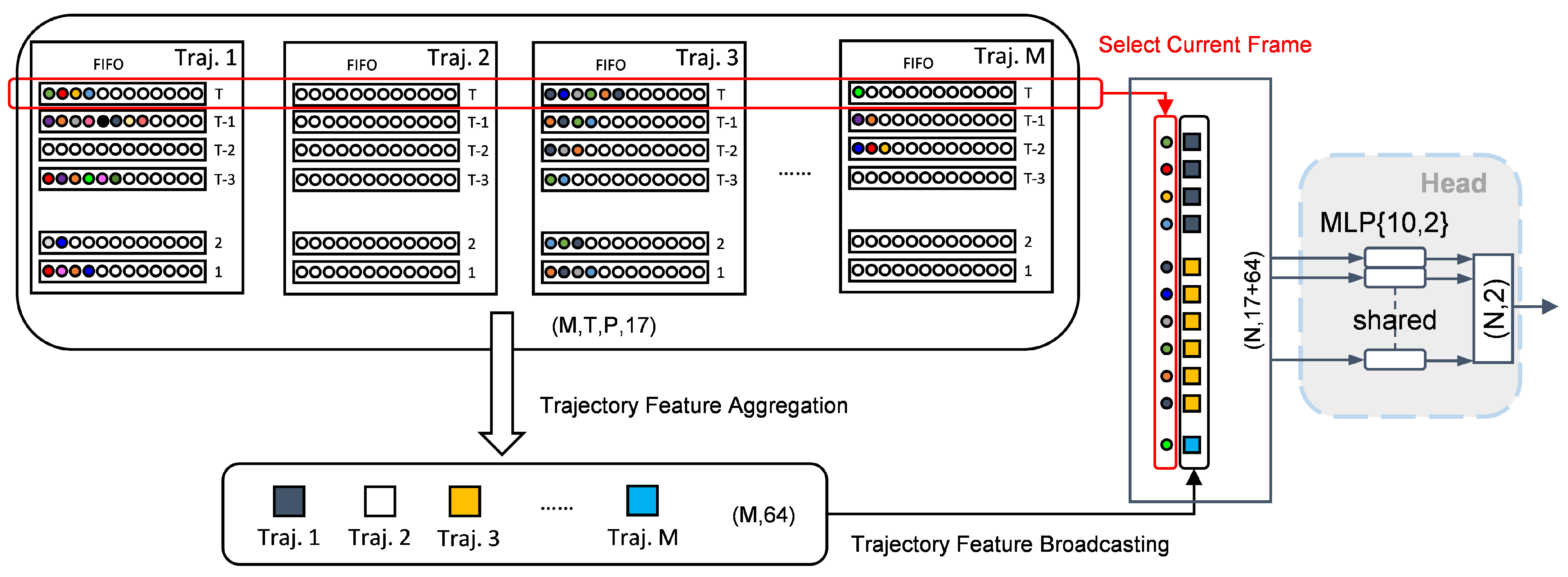
3.3. Trajectory Feature Aggregation
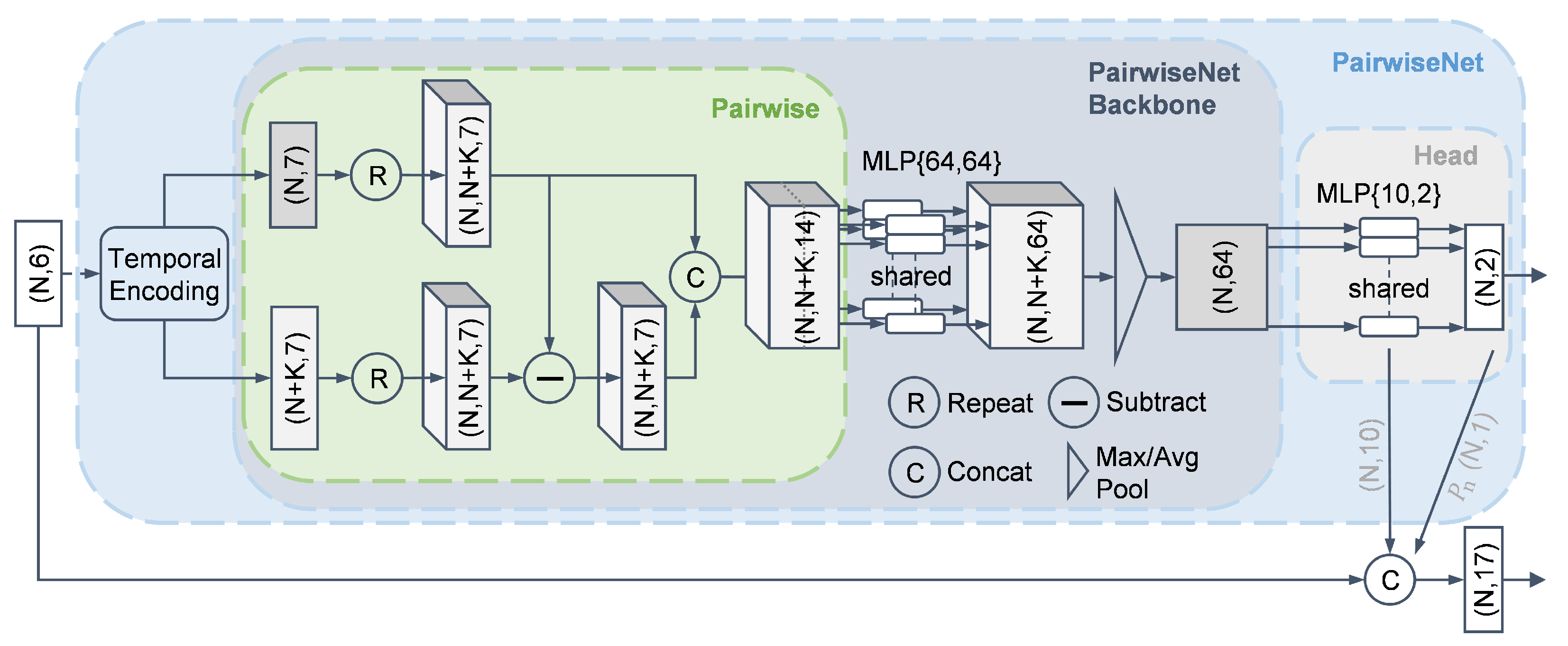
3.4. Inter-Trajectory Feature Extraction
3.5. Trajectory Feature Broadcasting
4. Experiments and Evaluation
4.1. Dataset
4.2. Evaluation Metrics
4.3. Experimental Setup
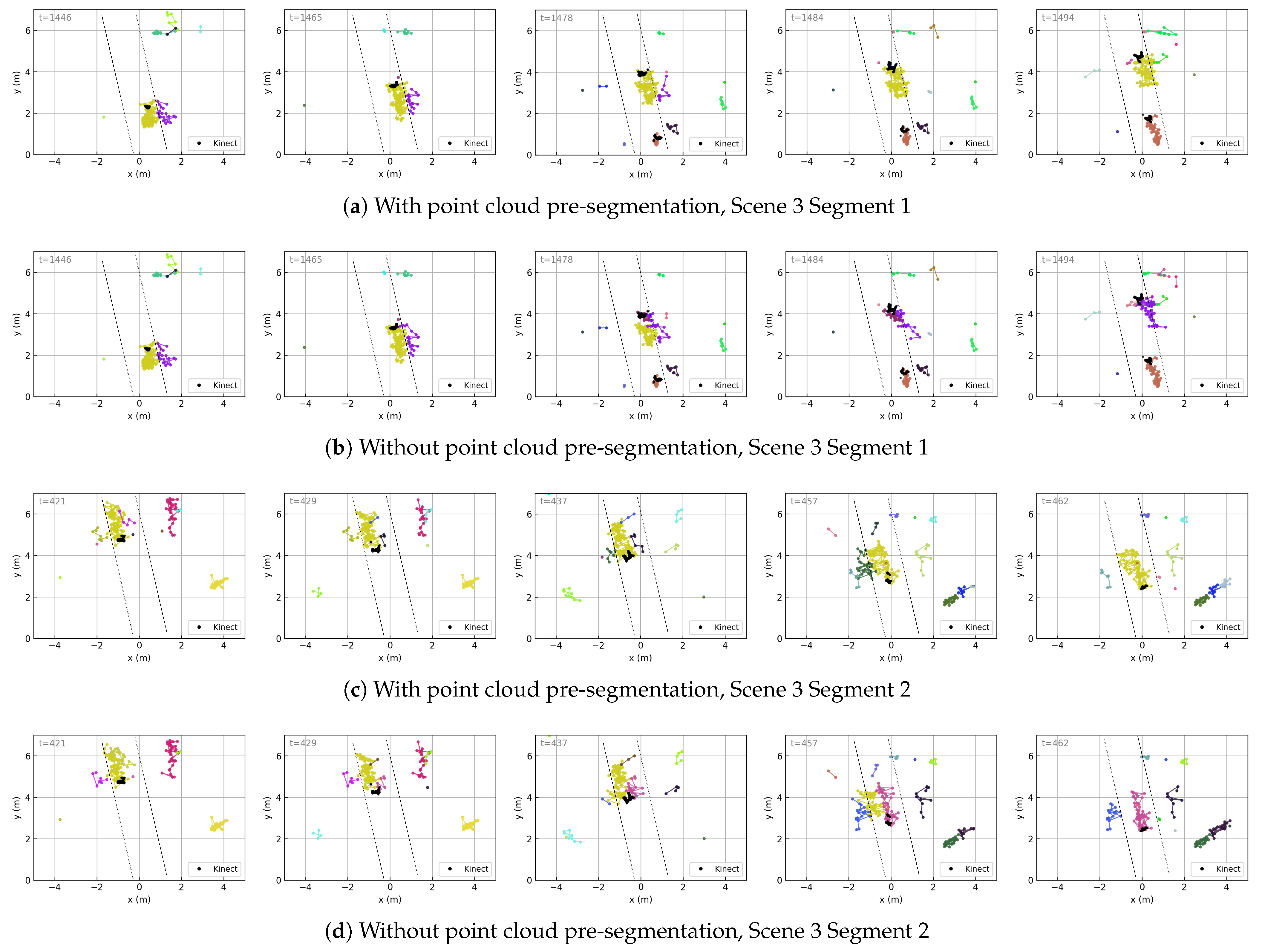
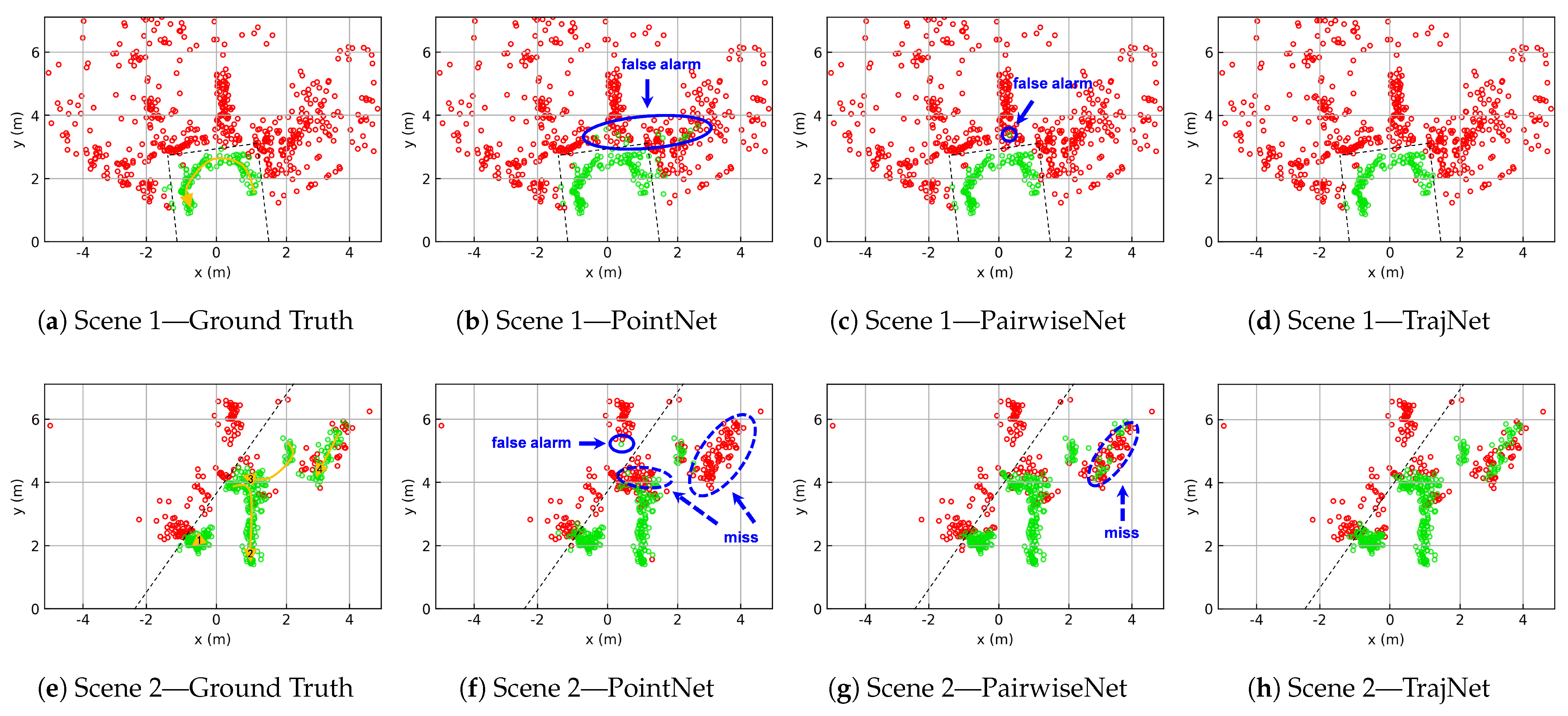
4.4. Trajectory Visualization
4.5. Quantitative Results
4.6. Ablation Study
4.6.1. Component Ablation
4.6.2. Input Feature Ablation
4.7. Point Cloud Segmentation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Frazao, A.; Pinho, P.; Albuquerque, D. Radar-Based Heart Cardiac Activity Measurements: A Review. Sensors 2024, 24, 7654. [Google Scholar] [CrossRef] [PubMed]
- Mehrjouseresht, P.; Hail, R.E.; Karsmakers, P.; Schreurs, D.M.M.P. Respiration and Heart Rate Monitoring in Smart Homes: An Angular-Free Approach with an FMCW Radar. Sensors 2024, 24, 2448. [Google Scholar] [CrossRef] [PubMed]
- Liang, T.; Liu, R.; Yang, L.; Lin, Y.; Shi, C.J.R.; Xu, H. Fall Detection System Based on Point Cloud Enhancement Model for 24 GHz FMCW Radar. Sensors 2024, 24, 648. [Google Scholar] [CrossRef]
- Shen, Z.; Nunez-Yanez, J.; Dahnoun, N. Advanced Millimeter-Wave Radar System for Real-Time Multiple-Human Tracking and Fall Detection. Sensors 2024, 24, 3660. [Google Scholar] [CrossRef]
- Balachandran, A.; Tharmarasa, R.; Acharya, A.; Chomal, S. Ghost Track Detection in Multitarget Tracking using LSTM Network. In Proceedings of the 2023 26th International Conference on Information Fusion (FUSION), Charleston, SC, USA, 27–30 June 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Thai, K.P.H.; Rabaste, O.; Bosse, J.; Poullin, D.; Sáenz, I.D.H.; Letertre, T.; Chonavel, T. Detection–Localization Algorithms in the Around-the-Corner Radar Problem. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2658–2673. [Google Scholar] [CrossRef]
- Guo, S.; Zhao, Q.; Cui, G.; Li, S.; Kong, L.; Yang, X. Behind Corner Targets Location Using Small Aperture Millimeter Wave Radar in NLOS Urban Environment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 460–470. [Google Scholar] [CrossRef]
- Luo, H.; Guo, S.; Jiang, M.; Chen, J.; Cui, G. A Reflective Surface Estimation Method Based on Multipath Utilization. IEEE Trans. Instrum. Meas. 2025, 74, 8001611. [Google Scholar] [CrossRef]
- Gal, A.; Bilik, I. Hybrid Approach for Reflective Surfaces Reconstruction Using Automotive Radar. In Proceedings of the 2023 IEEE International Radar Conference (RADAR), Sydney, Australia, 6–10 November 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Lv, Y.F.; Shi, L.F.; Yin, W.; Shi, Y.; Wang, L. Indoor Radar Point Cloud Ghost Elimination Method Based on Point Cloud Cluster Occlusion. IEEE Trans. Instrum. Meas. 2024, 73, 8508409. [Google Scholar] [CrossRef]
- Feng, R.; De Greef, E.; Rykunov, M.; Pollin, S.; Bourdoux, A.; Sahli, H. Multipath Ghost Recognition and Joint Target Tracking with Wall Estimation for Indoor MIMO Radar. IEEE Trans. Radar Syst. 2024, 2, 154–164. [Google Scholar] [CrossRef]
- Zhu, Z.; Guo, S.; Chen, J.; Xue, S.; Xu, Z.; Wu, P.; Cui, G.; Kong, L. Non-Line-of-Sight Targets Localization Algorithm via Joint Estimation of DoD and DoA. IEEE Trans. Instrum. Meas. 2023, 72, 8506311. [Google Scholar] [CrossRef]
- Chen, W.; Yang, H.; Bi, X.; Zheng, R.; Zhang, F.; Bao, P.; Chang, Z.; Ma, X.; Zhang, D. Environment-aware Multi-person Tracking in Indoor Environments with MmWave Radars. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2023, 7, 89. [Google Scholar] [CrossRef]
- Visentin, T.; Hasch, J.; Zwick, T. Analysis of multipath and DOA detection using a fully polarimetric automotive radar. In Proceedings of the 2017 European Radar Conference (EURAD), Nuremberg, Germany, 11–13 October 2017; pp. 45–48. [Google Scholar] [CrossRef]
- Feng, R.; De Greef, E.; Rykunov, M.; Sahli, H.; Pollin, S.; Bourdoux, A. Multipath Ghost Classification for MIMO Radar Using Deep Neural Networks. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York City, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zheng, L.; Long, J.; Lops, M.; Liu, F.; Hu, X.; Zhao, C. Detection of Ghost Targets for Automotive Radar in the Presence of Multipath. IEEE Trans. Signal Process. 2024, 72, 2204–2220. [Google Scholar] [CrossRef]
- Park, J.K.; Park, J.H.; Kim, K.T. Multipath Signal Mitigation for Indoor Localization Based on MIMO FMCW Radar System. IEEE Internet Things J. 2024, 11, 2618–2629. [Google Scholar] [CrossRef]
- Luo, H.; Zhu, Z.; Jiang, M.; Guo, S.; Cui, G. An Effective Multipath Ghost Recognition Method for Sparse MIMO Radar. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5111611. [Google Scholar] [CrossRef]
- Li, Y.; Shang, X. Multipath Ghost Target Identification for Automotive MIMO Radar. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference (VTC2022-Fall), London, UK, 26–29 September 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Prophet, R.; Martinez, J.; Michel, J.C.F.; Ebelt, R.; Weber, I.; Vossiek, M. Instantaneous Ghost Detection Identification in Automotive Scenarios. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, S.; Wang, H.; Wang, G.; Weng, W.; Wang, R. Algorithm Design to Identify Targets From Multipath Ghosts and Clutters for SISO IR-UWB Radar: Incorporating Waveform Features and Trajectory. IEEE Sens. J. 2024, 24, 2278–2288. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, M.; Wang, X.; Chen, B. Multipath Model and Ghost Suppression for Millimeter Wave Traffic Radar. In Proceedings of the 2024 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Zhuhai, China, 22–24 November 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Jeong, T.; Lee, S. Ghost Target Suppression Using Deep Neural Network in Radar-Based Indoor Environment Mapping. IEEE Sens. J. 2022, 22, 14378–14386. [Google Scholar] [CrossRef]
- Kopp, J.; Kellner, D.; Piroli, A.; Dallabetta, V.; Dietmayer, K. Simultaneous Clutter Detection and Semantic Segmentation of Moving Objects for Automotive Radar Data. In Proceedings of the 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bilbao, Spain, 24–28 September 2023; pp. 1078–1085. [Google Scholar] [CrossRef]
- Stephan, M.; Santra, A. Radar-Based Human Target Detection using Deep Residual U-Net for Smart Home Applications. In Proceedings of the 2019 18th IEEE International Conference On Machine Learning And Applications (ICMLA), Boca Raton, FL, USA, 16–19 December 2019; pp. 175–182. [Google Scholar] [CrossRef]
- Chuanhao, Z.; Xu, H.; Jiamin, L.; Mingxuan, L.; Xueyao, H.; Liping, Z. A Multipath Signals Recognition Method based on Deep Neural Network. In Proceedings of the 2024 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Zhuhai, China, 22–24 November 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Kraus, F.; Scheiner, N.; Ritter, W.; Dietmayer, K. The Radar Ghost Dataset—An Evaluation of Ghost Objects in Automotive Radar Data. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 8570–8577. [Google Scholar] [CrossRef]
- Kopp, J.; Kellner, D.; Piroli, A.; Dietmayer, K. Tackling Clutter in Radar Data - Label Generation and Detection Using PointNet++. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 1493–1499. [Google Scholar] [CrossRef]
- Wang, L.; Giebenhain, S.; Anklam, C.; Goldluecke, B. Radar Ghost Target Detection via Multimodal Transformers. IEEE Robot. Autom. Lett. 2021, 6, 7758–7765. [Google Scholar] [CrossRef]
- Liu, R.; Song, X.; Qian, J.; Hao, S.; Lin, Y.; Xu, H. A Data-Driven Method for Indoor Radar Ghost Recognition With Environmental Mapping. IEEE Trans. Radar Syst. 2024, 2, 910–923. [Google Scholar] [CrossRef]
- Longman, O.; Villeval, S.; Bilik, I. Multipath Ghost Targets Mitigation in Automotive Environments. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 8–14 May 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Sabery, S.M.; Bystrov, A.; Gardner, P.; Stroescu, A.; Gashinova, M. Road Surface Classification Based on Radar Imaging Using Convolutional Neural Network. IEEE Sens. J. 2021, 21, 18725–18732. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Technical Report TR 95-041; University of North Carolina: Chapel Hill, NC, USA, 2006. [Google Scholar]
- Feng, R.; Greef, E.D.; Rykunov, M.; Sahli, H.; Pollin, S.; Bourdoux, A. Multipath Ghost Recognition for Indoor MIMO Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–10. [Google Scholar] [CrossRef]
- Charles, R.Q.; Su, H.; Kaichun, M.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar] [CrossRef]
- Chollet, F. Xception: Deep Learning with Depthwise Separable Convolutions. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1800–1807. [Google Scholar] [CrossRef]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep hierarchical feature learning on point sets in a metric space. In Proceedings of the 31st International Conference on Neural Information Processing Systems, Red Hook, NY, USA, 4–9 December 2017; pp. 5105–5114. [Google Scholar]
- Wang, Y.; Sun, Y.; Liu, Z.; Sarma, S.E.; Bronstein, M.M.; Solomon, J.M. Dynamic Graph CNN for Learning on Point Clouds. ACM Trans. Graph. 2019, 38, 146. [Google Scholar] [CrossRef]
- Guo, M.H.; Cai, J.X.; Liu, Z.N.; Mu, T.J.; Martin, R.R.; Hu, S.M. PCT: Point cloud transformer. Comput. Vis. Media 2021, 7, 187–199. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | Operation | Kernel | Stride | Input Shape | Output Shape |
|---|---|---|---|---|---|
| 1 | Transpose | – | – | ||
| 2 | DSC 1: Depthwise Conv + ReLU | 4 | 2 | ||
| 3 | DSC 1: Pointwise Conv + ReLU | 1 | 1 | ||
| 4 | DSC 2: Depthwise Conv + ReLU | 4 | 2 | ||
| 5 | DSC 2: Pointwise Conv + ReLU | 1 | 1 | ||
| 6 | DSC 3: Depthwise Conv + ReLU | 4 | 2 | ||
| 7 | DSC 3: Pointwise Conv + ReLU | 1 | 1 | ||
| 8 | Reshape | – | – |
| Model | Acc | Prec. | Recall | F1 | AP | AUROC | Params |
|---|---|---|---|---|---|---|---|
| (%) | (%) | (%) | (%) | (%) | (%) | ||
| MLP{64,16,2} | 80.6 | 84.5 | 88.5 | 86.4 | 93.1 | 85.7 | 1.5k |
| PointNet [35] | 84.5 | 90.8 | 86.6 | 88.7 | 96.4 | 91.8 | 29.7k |
| PointNet++ [37] | 91.3 | 95.0 | 92.4 | 93.7 | 98.7 | 97.0 | 38.7k |
| DGCNN [38] | 91.1 | 95.1 | 92.0 | 93.5 | 98.6 | 96.7 | 227.7k |
| PCT [39] | 88.4 | 93.9 | 89.1 | 91.5 | 97.8 | 94.9 | 629.9k |
| PairwiseNet [30] | 91.8 | 96.8 | 91.3 | 94.0 | 99.0 | 97.5 | 6.2k |
| PairwiseNet (R-Map) [30] | 96.0 | 96.8 | 97.5 | 97.1 | 99.7 | 99.2 | 16.4k |
| PairwiseNet (T = 30) | 92.3 | 97.0 | 91.8 | 94.3 | 99.1 | 97.8 | 6.2k |
| TrajNet | 93.5 | 95.8 | 94.9 | 95.3 | 99.2 | 98.2 | 24.9k |
| TrajNet (w/o pre-seg) | 92.0 | 95.0 | 93.5 | 94.3 | 98.3 | 96.4 | 23.8k |
| No. | Pre-Seg. for Tracking | Pre-Seg. for Features | Trajectory Aggregation | Pairwise Inter-Trajectory | Attention-Based Inter-Trajectory | Acc | AUROC |
|---|---|---|---|---|---|---|---|
| 1 | ✓ | ✓ | ✓ | ✓ | 93.5% | 98.2% | |
| 2 | ✓ | ✓ | ✓ | 93.3% | 98.1% | ||
| 3 | ✓ | ✓ | ✓ | 92.1% | 96.5% | ||
| 4 | ✓ | ✓ | 92.0% | 96.4% | |||
| 5 | ✓ | 91.8% | 97.5% | ||||
| 6 | ✓ | ✓ | ✓ | 93.3% | 98.1% | ||
| 7 | ✓ | ✓ | ✓ | ✓ | 93.4% | 98.1% |
| No. | x | y | r | v | P | Acc | |
|---|---|---|---|---|---|---|---|
| 1 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | 93.5% |
| 2 | ✓ | ✓ | ✓ | ✓ | ✓ | 93.3% | |
| 3 | ✓ | ✓ | ✓ | ✓ | ✓ | 92.7% | |
| 4 | ✓ | ✓ | ✓ | ✓ | 92.4% | ||
| 5 | ✓ | ✓ | ✓ | ✓ | 90.9% | ||
| 6 | ✓ | ✓ | 90.3% | ||||
| 7 | ✓ | ✓ | ✓ | ✓ | 89.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Qin, Z.; Song, X.; Yang, L.; Lin, Y.; Xu, H. Indoor mmWave Radar Ghost Suppression: Trajectory-Guided Spatiotemporal Point Cloud Learning. Sensors 2025, 25, 3377. https://doi.org/10.3390/s25113377
Liu R, Qin Z, Song X, Yang L, Lin Y, Xu H. Indoor mmWave Radar Ghost Suppression: Trajectory-Guided Spatiotemporal Point Cloud Learning. Sensors. 2025; 25(11):3377. https://doi.org/10.3390/s25113377
Chicago/Turabian StyleLiu, Ruizhi, Zhenhang Qin, Xinghui Song, Lei Yang, Yue Lin, and Hongtao Xu. 2025. "Indoor mmWave Radar Ghost Suppression: Trajectory-Guided Spatiotemporal Point Cloud Learning" Sensors 25, no. 11: 3377. https://doi.org/10.3390/s25113377
APA StyleLiu, R., Qin, Z., Song, X., Yang, L., Lin, Y., & Xu, H. (2025). Indoor mmWave Radar Ghost Suppression: Trajectory-Guided Spatiotemporal Point Cloud Learning. Sensors, 25(11), 3377. https://doi.org/10.3390/s25113377