1. Introduction
Autonomous mobile robots (AMRs) are increasingly used in diverse domains, including logistics, surveillance, service robotics, and education. Their capacity to navigate autonomously in indoor and outdoor environments relies on robust localization, sensor fusion, and motion control. While advanced AMR systems are commercially available, there is a growing need for modular, affordable, and open systems in education and research, where flexibility, transparency, and hands-on learning are essential.
Within this context, many universities and technical institutions are designing and building low-cost mobile robots from the ground up, often using heterogeneous components and open-source software frameworks.
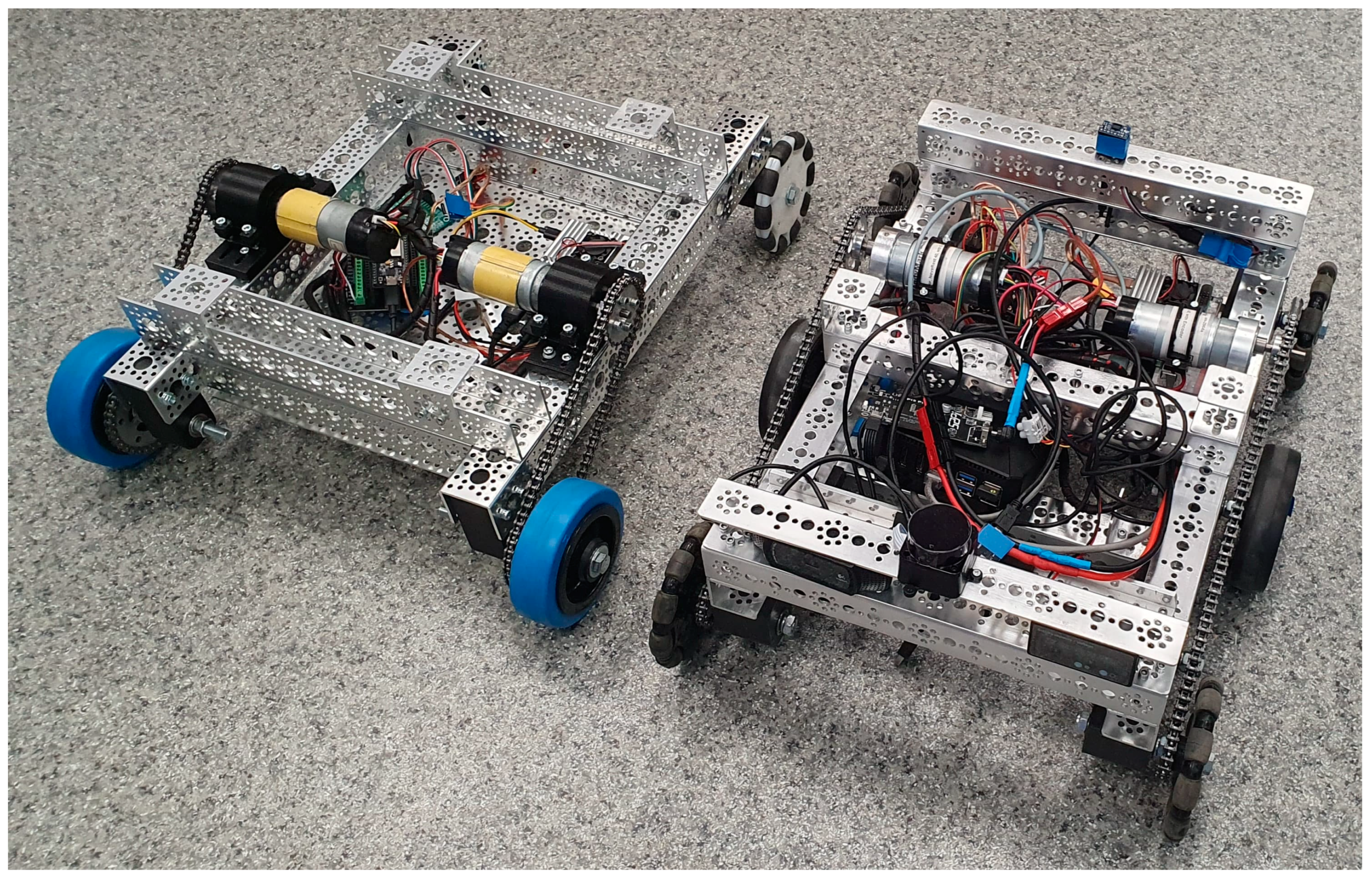
Figure 1 shows examples of such robots developed by students as part of robotics courses and research projects supervised by the author. These platforms typically integrate a variety of sensors, including wheel encoders, inertial measurement units (IMUs), and lidars, and are controlled using embedded hardware such as the Raspberry Pi (Raspberry Pi Ltd, Cambridge, England) and ESP32 microcontrollers (Espressif Systems, Shanghai, China).
To support such educational and research-focused development, the Robot Operating System 2 (ROS 2) has emerged as a powerful middleware for robot software development [
1]. In particular, the Humble and Jazzy distributions offer long-term support, modularity, and compatibility with both high- and low-level components [
2]. ROS 2 provides built-in tools for sensor integration, real-time communication, and state estimation, including algorithms such as the Extended Kalman Filter (EKF) for localization [
3]. This makes it particularly suitable for modular educational robots, where system integration and adaptability are more important than cost optimization or mass production.
Accurate localization enables autonomous mobile robots (AMRs) to make reliable motion decisions, avoid obstacles, and execute path planning. In most ROS-based systems, localization is achieved by sensor fusion, typically involving wheel encoder odometry, inertial measurements, and sometimes visual or Lidar-based input. The most common approach for fusing these inputs is the Extended Kalman Filter (EKF), implemented in the widely used
robot_localization package [
4].
However, the performance of the EKF depends not only on the accuracy of the sensors, but also critically on the correct configuration of their covariance matrices, which represent the estimated uncertainty in each measurement. These covariances directly influence how much weight the EKF gives to each sensor input at each time step. Incorrect, inconsistent, or static covariance values can cause significant drift, instability, or even complete filter divergence, particularly in noisy or changing environments [
5].
In practice, most ROS users define these covariance values manually, often based on intuition, trial-and-error, or reused defaults. The
robot_localization documentation notes that sensor noise must be modeled as a 6 × 6 covariance matrix and encourages empirical tuning to avoid assigning excessive confidence to inaccurate measurements [
6]. Furthermore, REP-105 (Standard Units of Measure and Coordinate Conventions) establishes consistency in sensor frames and units [
7], but does not specify how to adapt uncertainty dynamically in response to real-world variations.
This tuning challenge becomes even more prominent in educational robot platforms are built from zero, where sensor quality varies widely between units, mechanical tolerances are inconsistent, motion patterns are non-repetitive or perturbed and environments often differ from test to deployment settings.
As a result, many ROS 2-based robots suffer from suboptimal localization due to outdated or mismatched covariance values, which limits the effectiveness of downstream modules like the ROS 2 Navigation Stack (Nav2) or autonomous decision making. While the ROS community has developed excellent tools for state estimation, there remains a gap in practical, adaptive covariance tuning, especially in real-time and on embedded systems.
Several studies have investigated methods for improving robot localization by refining sensor fusion strategies, particularly with respect to tuning measurement covariances. In traditional ROS-based systems, the most common approach involves manually setting fixed covariance values for each sensor input. This method, although widely used, has notable limitations: it lacks adaptability to different environments or sensor behaviors, and it often relies on user experience or trial-and-error rather than formal modeling.
To address these challenges, researchers have proposed more dynamic techniques, such as adaptive noise estimation or online covariance tuning. Some of these approaches use model-based estimation of measurement uncertainty, while others rely on heuristic strategies that adjust covariances based on observed consistency in state updates [
3]. However, many of these methods require continuous access to ground truth data, significant computational resources, or they are not implemented within the standard ROS ecosystem. Some of them investigated the localization accuracy of autonomous vehicles highlighting specific challenges related to drift and floor conditions [
8].
Recent developments have explored the use of machine learning (ML) or artificial intelligence (AI) to improve odometry estimation and state fusion. For example, supervised learning models have been trained to predict localization error or to correct sensor drift based on motion profiles and environmental conditions [
9,
10,
11]. While these approaches show promising results in terms of accuracy, they are often developed outside the ROS 2 architecture, lack integration with standard packages like
robot_localization, or are too computationally intensive for real-time execution on embedded platforms.
Moreover, there is an ongoing debate in the field between two design philosophies:
End-to-end learning systems aim to replace traditional state estimation pipelines entirely with neural networks trained on sensor data [
12];
Hybrid modular approaches, on the other hand, seek to enhance classical filters (such as EKF) using AI components for specific tasks (e.g., uncertainty prediction, drift compensation), while preserving interpretability and robustness [
13].
Recent advancements in ROS 2 and AI-driven uncertainty modeling have enhanced localization robustness for mobile robots in dynamic environments. Macenski et al. [
14] highlighted Nav2’s navigation systems, improving pose estimation [
14], while Ye et al. [
15] optimized real-time performance with Preempt_RT Linux [
15]. Hachem et al. [
16] implemented robust control strategies for ROS 2 localization [
16]. Uncertainty-aware multi-modal localization using Monte Carlo dropout [
17] enables reliable pose predictions, complementing the hybrid AI-EKF framework’s real-time covariance adjustment. Despite these advances, challenges remain in scaling lightweight AI-driven solutions for real-time covariance adjustment on embedded platforms, a gap this study addresses through its hybrid AI-EKF framework.
Even with this progress, there is limited research on integrating lightweight AI modules into ROS 2 pipelines for dynamic covariance adjustment, particularly in real-time on hardware-constrained systems like the Raspberry Pi. This gap highlights the need for practical, accessible solutions that bridge traditional sensor fusion with data-driven adaptation, especially in contexts like education and prototyping, where robots must operate reliably with limited configuration effort.
Within the field of mobile robotics and autonomous systems, there are increasingly polarized perspectives regarding the role of artificial intelligence in state estimation and localization. One school of thought advocates for end-to-end learning systems, where deep neural networks learn to map raw sensor inputs directly to position or pose estimates without relying on classical filters or explicit modeling. These approaches aim to eliminate the need for hand-tuned parameters or manual sensor calibration and have shown impressive performance in simulation and controlled environments [
18].
However, such systems typically require large, labeled datasets for supervised learning, substantial computational resources (often GPU-accelerated), and often lack transparency or interpretability, which complicates debugging and formal validation.
In contrast, another view supports modular or hybrid architecture, where AI is used selectively—not to replace but to augment classical algorithms such as the Extended Kalman Filter (EKF). In this paradigm, machine learning models may be employed to predict sensor noise levels, estimate likely error distributions, or dynamically adapt configuration parameters such as covariances, while the core estimation logic remains transparent and well-understood [
9].
This hybrid approach offers several advantages: it preserves the deterministic structure and physical grounding of the EKF, it enables real-time integration with existing ROS 2 packages (e.g., robot_localization), and it reduces the barrier to entry for educational, low-power, or modular robotic systems.
The work presented in this paper is situated strongly within this hybrid philosophy. We do not aim to replace traditional estimation techniques of real-time localization for differential-drive mobile robots, but rather to enhance them through the targeted use of lightweight, regression-based AI models. Our system maintains compatibility with standard ROS 2 tooling, runs in real time on a Raspberry PI 4, and offers improved localization performance through adaptive covariance tuning, while remaining interpretable and reproducible. Instead of relying on manually tuned, static covariance values, our hybrid architecture integrates a machine learning module that predicts odometry and orientation errors based on live sensor inputs. We achieve this by dynamically adjusting the sensor covariances used in Extended Kalman Filter (EKF) fusion within the ROS 2 framework.
These predicted errors are used in a closed-loop system to update the covariance matrices provided to the EKF, which leads to more accurate pose estimation across diverse motion profiles and sensor conditions. By bridging traditional filtering techniques with data-driven methods, our approach maintains interpretability and modularity while delivering enhanced performance.
To ensure broad applicability and ease of replication, the proposed system is designed to run in real time on low-cost, embedded platforms such as the Raspberry PI 4, operate seamlessly using standard ROS 2 nodes and message types, and integrate modularly into existing ROS 2 navigation stacks.
The primary aim of this work is to enhance the accuracy and robustness of real-time localization for differential-drive mobile robots by dynamically adjusting sensor covariances in the Extended Kalman Filter (EKF) within the ROS 2 framework. Unlike recent ROS 2 positioning optimization studies that focus on navigation algorithms [
14], real-time transmission enhancements [
15], or robust control strategies [
16], this study introduces a lightweight, regression-based AI model for real-time covariance prediction, optimized for low-power platforms like the Raspberry Pi 4. The key contributions are as follows:
A reproducible framework for AI-assisted covariance tuning in the Extended Kalman Filter (EKF), integrated seamlessly within the ROS 2 ecosystem. This framework remains modular and compatible with robot_localization, preserving standard data flows and message types.
A lightweight machine learning model that predicts odometry and orientation errors based on real-time motion and sensor data, optimized for inference on low-power platforms such as the Raspberry Pi 4.
A dual-node ROS 2 architecture comprising two core components: ai_covariance_prediction—performs real-time error inference from sensor data and ai_covariance_updater—dynamically adjusts EKF covariance matrices based on the predicted errors, thus closing the loop between perception and state estimation.
A structured dataset and a rigorous methodology for training and evaluating the AI model, developed from controlled motion experiments on a student-designed mobile robot.
An experimental validation comparing baseline (static) and AI-assisted (dynamic) covariance tuning strategies, which demonstrates clear improvements in localization accuracy, consistency, and overall filter stability.
In summary, our results confirm that the hybrid method significantly enhances localization performance while maintaining computational efficiency and ease of deployment in educational or prototyping settings. To foster reproducibility and community adoption, all datasets, configuration files, and source code are made publicly available.
2. Materials and Methods
2.1. Robot Hardware Platform
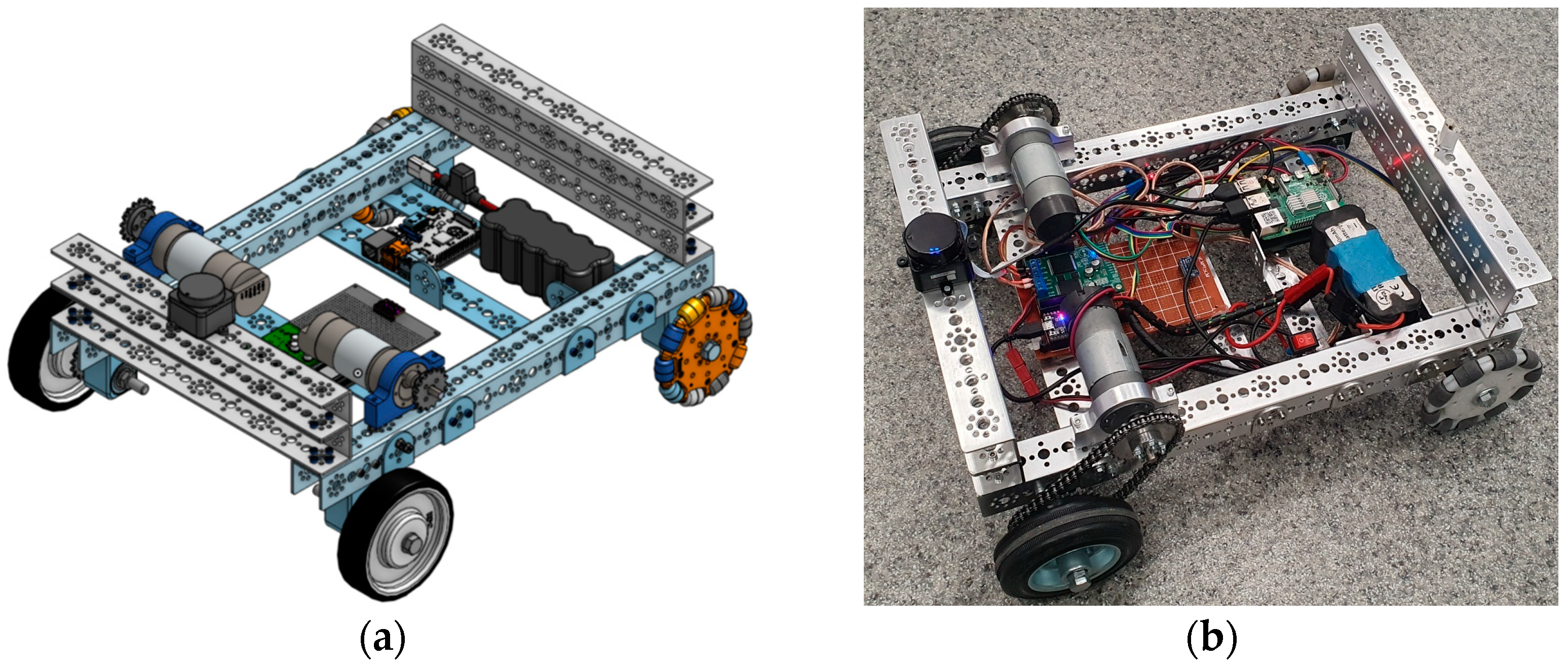
The experiments and evaluations described in this study were conducted on the AMR2AX mobile robot platform, which was designed and developed by the author in collaboration with a coordinated team of students, using an iterative product design based on CAD-to-physical prototyping process. The robot is designed for differential-drive motion, using a standardized modular chassis assembled from aluminum three-sided profile of U-Channel and metal brackets, allowing for repeatability and adaptation across multiple builds.
Figure 2a illustrates the 3D CAD model of the AMR2AX platform, developed in a virtual environment to validate kinematics, component layout, and sensor positioning. This stage employed iterative design cycles, guided by New Product Development (NPD) principles and Project-Based Pedagogy [
19], to refine the model based on simulation results and component interactions. Following virtual optimization, students prototyped the design (
Figure 2b), iteratively assembling components (
Table 1) while testing and refining kinematic performance. Prototyping feedback informed updates to the CAD model, ensuring real-world alignment. This NPD-driven, pedagogy-grounded approach accelerated hands-on learning, meeting practical requirements through systematic iteration.
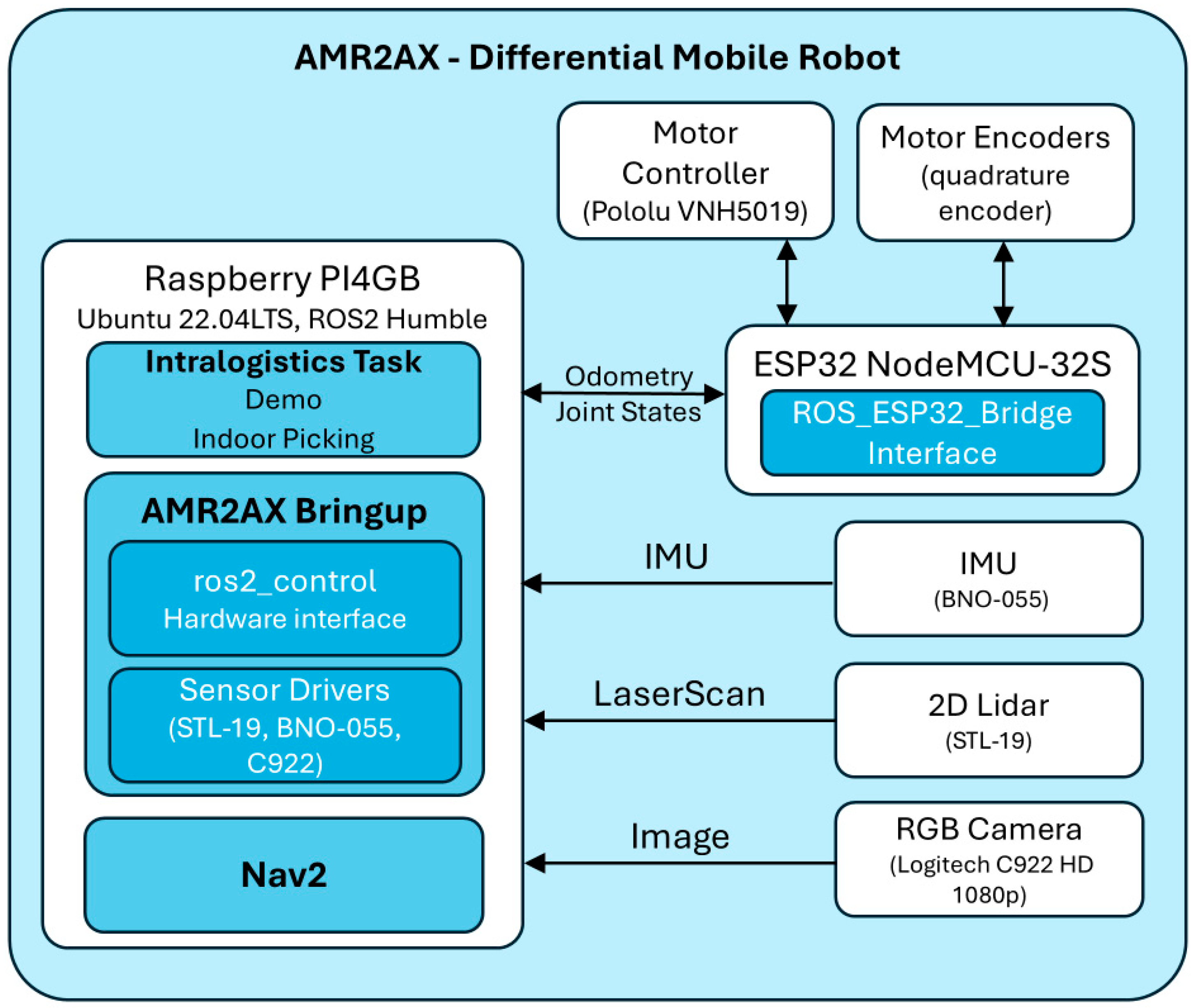
The ESP32 board communicates with the Raspberry Pi over a serial link, using a custom ROS 2-compatible firmware architecture (
Figure 3) that transmits encoder data and accepts velocity commands. Sensor readings are published as standard ROS 2 topics, enabling seamless integration with ros2_control, the
robot_localization package, and the Nav2 stack.
The flexible frame design also allows experimentation with different wheel types, including omni-wheels or caster configurations, enabling exploration of chassis influence on odometry accuracy. This modularity supports a hands-on educational experience, where students can iterate through multiple physical configurations and analyze the impact on real-world localization.
2.2. Software Stack and ROS 2 Setup
The mobile robot platform operates under the ROS 2 Humble middleware on a Raspberry Pi 4 and is controlled through a modular software stack that combines native ROS 2 packages with a custom ESP32 communication bridge. The system is structured for full reproducibility and transparency, with all relevant code and configuration files publicly available in an open-access repositories as detailed in the Data Availability Statement.
A custom package, ROS_ESP32_Bridge was developed for enabling full-duplex serial communication between the Raspberry Pi and the ESP32 microcontroller. We used in our case a ESP32s NodeMCU (Shenzhen Ai-Thinker Technology Co., Shenzhen, China), which has an interface that enables precise motor control by generating PWM signals for the Pololu VNH5019 Motor Shield (Pololu Corporation, Las Vegas, NV, USA), allowing it to drive two motors with encoders, 2 NeveRest 40 gearmotors (AndyMark Inc., Kokomo, IN, USA). The ESP32 board has full-duplex serial communication with Raspberry Pi on which is publishing wheel state data to ROS 2 topics and subscribing to velocity commands. The package is modular, allowing it to be adapted for different motor controllers and encoders.
At the ROS 2 level, the robot uses the ros2_control framework and the diff_drive_controller plugin for managing differential drive motion [
20]. Wheel parameters, limits, and odometry covariance estimates are defined in the in a yaml configuration file (ros_control.yaml). This setup ensures real-time execution at 20–50 Hz and supports position feedback via encoder readings.
The AMR2AX Bringup package is responsible for initializing both the hardware and software components of the robot. It ensures robust communication between the Raspberry Pi and ESP32 via the ROS_ESP32_Bridge interface. In parallel, the robot_localization package fuses odometry data from wheel encoders with IMU measurements using an Extended Kalman Filter (EKF), where the covariance matrices play a pivotal role in assigning proper sensor weightings.
The complete robot stack is launched with a parametric command (like: ros2 launch diffdrive_esp32 robot.launch.py use_sim_time: = False) in the master launch file, which includes the following subsystems:
The robot_state_publisher broadcasts the robot’s URDF-based transform tree, while filtered odometry is published to the platform/odom/filtered topic.
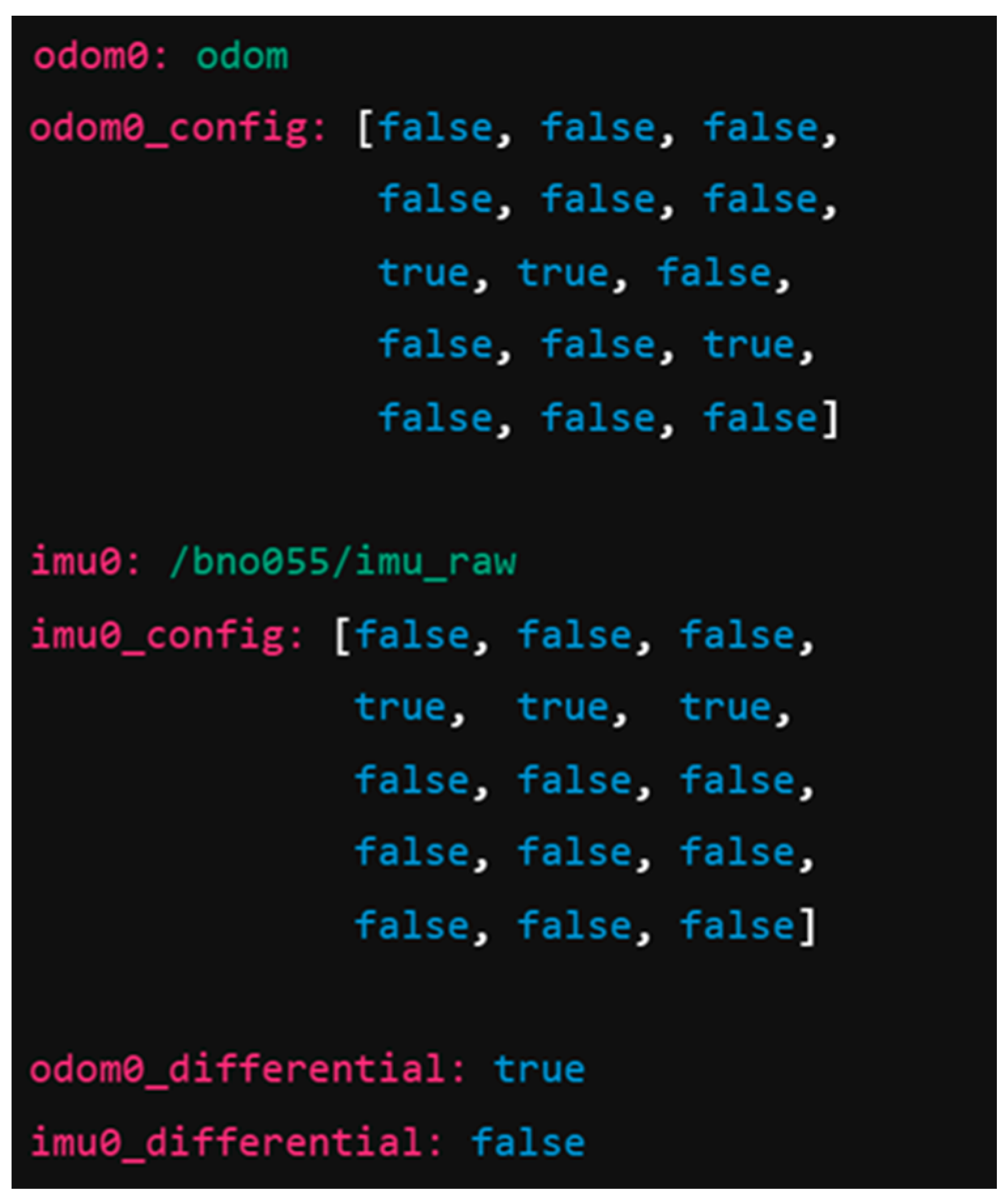
Key parameters are defined in separate YAML files, like in
Figure 4 with extras from localization parameters
robot_localization.yaml. The complete file is available in the sub-folder /dataset from the open-access repository ai_tools, as detailed in the Data Availability Statement.
These configurations reflect the following assumptions:
However, such fixed covariances were shown to be insufficient in variable conditions, especially under the following conditions:
Motor slip occurs due to acceleration;
The robot runs over irregular surfaces;
Sensor noise increases with heat or power fluctuations.
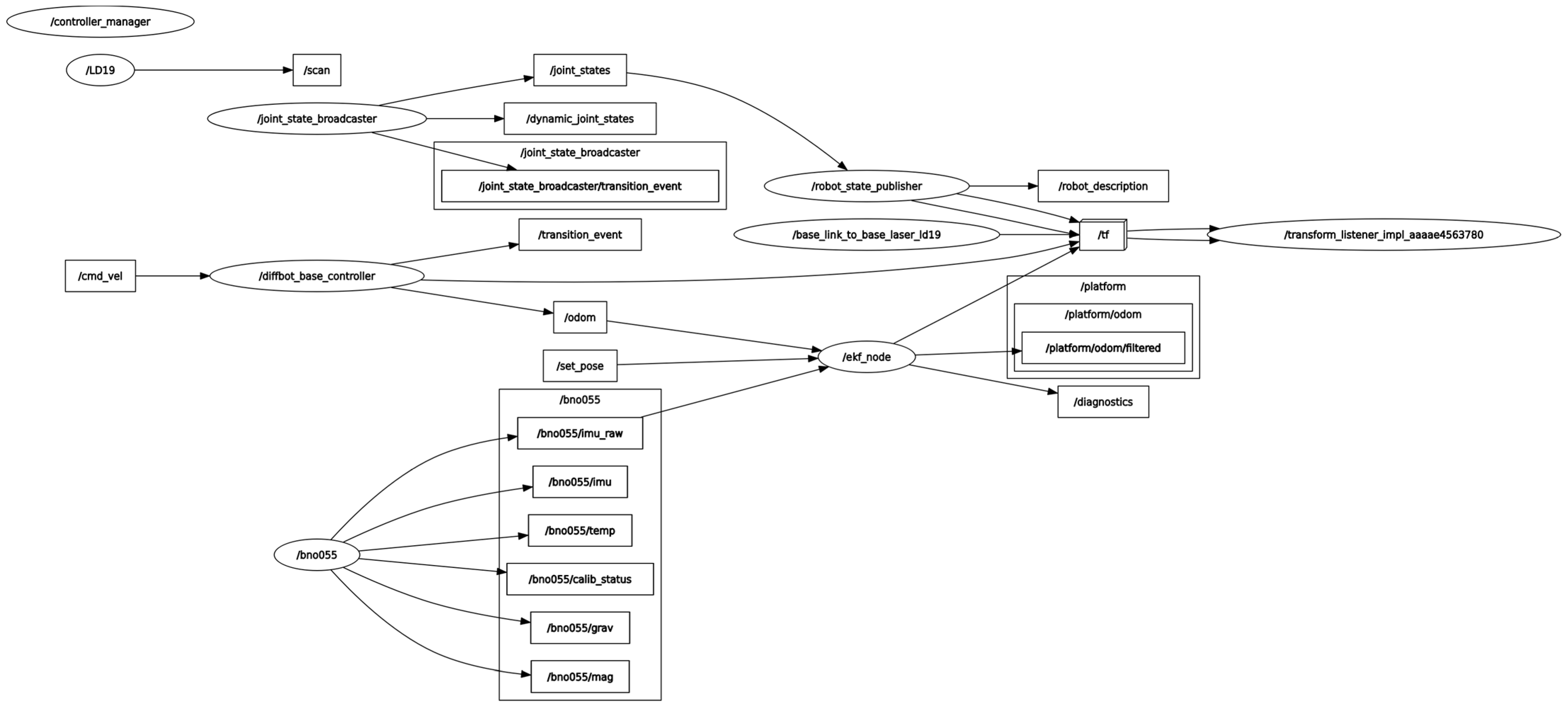
Figure 5 illustrates the ROS 2 topic graph after launching the robot with the baseline setup (without AI-based tuning). The ekf_node subscribes to both odometry and IMU topics, outputs to the filtered odometry topic, and publishes transforms to /tf. The system operates at 50 Hz, with synchronization ensured through timestamped messages and consistent transform frames.
This baseline configuration serves as the reference for evaluating the proposed AI-based covariance adjustment method presented in subsequent sections.
2.3. Dataset Collection Strategy
To train the AI model for dynamic covariance prediction within the ai_tools package, we systematically recorded a dataset capturing the robot’s motion, sensor readings, and the corresponding estimation errors produced by the baseline Extended Kalman Filter (EKF). Data collection occurred in a controlled indoor laboratory environment on a flat surface with consistent lighting to ensure repeatability and minimize external variables such as uneven terrain or variable illumination. The dataset was designed to reflect real-world robotic navigation scenarios, enabling the model to learn the relationship between sensor inputs, control commands, and localization errors, thereby improving the EKF’s covariance estimates during operation.
The robot was manually teleoperated using varying linear and angular velocity commands to simulate diverse motion behaviors, including forward/backward driving, left and right turns, and mixed trajectories with acceleration changes–
Figure 6. This approach ensured a broad spectrum of sensor responses and motion profiles representative of operational conditions. The ROS 2 topics recorded during these sessions included raw odometry from encoder-based estimation (
/odom), filtered EKF output (
/platform/odom/filtered), commanded motion velocities (
/cmd_vel), raw IMU data (
/bno055/imu_raw), and wheel encoder joint positions (
/joint_states). These topics were captured using a specific ROS command:
ros2 bag record -o ~/amr2AX_ws/bags/ai_training_2 /odom /platform/odom/filtered /cmd_vel /bno055/imu_raw /joint_states.
The initial dataset, collected through manual teleoperation, comprised over 16,000 records, providing sufficient variability for the first model training iteration. Subsequent iterations expanded the dataset by integrating data logged from the ai_tools package during real-time operation. Specifically, the ai_covariance_node generated timestamped CSV logs (e.g., ai_log_20250409_140005_normalized.csv) containing sensor readings, computed features, and predicted errors. These logs were combined with the initial dataset. By version 7 of the dataset (train_split_v7.csv, test_split_v7.csv), the total number of samples exceeded 21,000, reflecting a progressive increase through multiple trials and ensuring the model was exposed to a wider range of operational conditions. The files are available in the sub-folder /dataset from the open-access repository ai_tools as detailed in the Data Availability Statement.
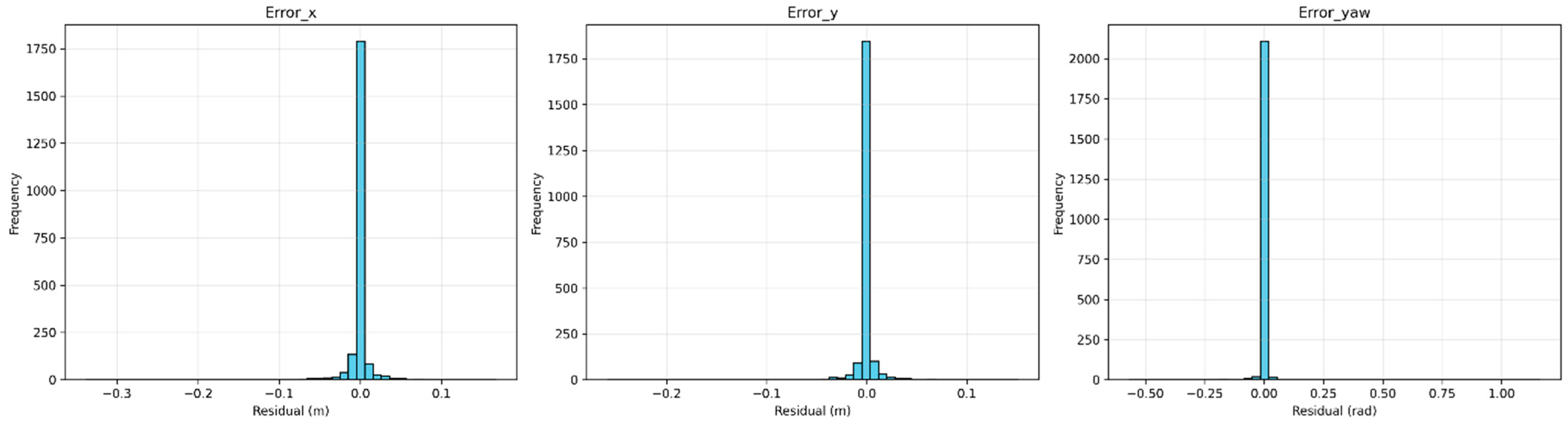
The raw ROS 2 bag files were converted to CSV format and processed using a custom script that synchronized all signals to a common timestamp reference, interpolated missing sensor values, and computed derived features to enhance the model’s input space. True estimation errors were calculated by comparing the filtered EKF output (/platform/odom/filtered) with raw odometry (/odom). Positional errors were computed as error_x = pos_x_odom − pos_x_filtered and error_y = pos_y_odom − pos_y_filtered (in meters), where pos_x_odom and pos_y_odom are from /odom, and pos_x_filtered and pos_y_filtered are from /platform/odom/filtered. The yaw angle from odometry, yaw_odom, was derived from quaternion components using yaw_odom = 2 × np.arctan2(yaw_z_odom, yaw_w_odom) (in radians). Similarly, the filtered yaw, yaw_filtered, was computed from the EKF’s quaternion output as yaw_filtered = 2 × np.arctan2(yaw_z_filtered, yaw_w_filtered). The yaw error was defined as error_yaw = yaw_odom − yaw_filtered (in radians), representing the orientational discrepancy. The metric |error_yaw − yaw_diff|, used to evaluate yaw prediction accuracy in real-time operation, represents the absolute difference between the Random Forest’s predicted yaw error (error_yaw = yaw_odom − yaw_filtered) and the actual yaw discrepancy (yaw_diff = yaw_odom − yaw_filtered) computed by the ai_covariance_node. At runtime, yaw_filtered is smoothed using an exponential moving average (EMA) with alpha = 0.7 in ai_covariance_node.py, introducing a potential mismatch between error_yaw and yaw_diff, which this metric quantifies to assess the model’s predictive performance.
The processed dataset included 15 input features, consistent with those used in ai_covariance_node.py for real-time inference: accelerometer readings (acc_x, acc_y, acc_z in m/s2 from /bno055/imu_raw), gyroscope angular velocity (gyro_z in rad/s from /bno055/imu_raw), odometry velocities (linear_x in m/s, angular_z in rad/s from /odom), orientation estimates (yaw_odom, yaw_filtered in radians), yaw discrepancy (yaw_diff = yaw_odom − yaw_filtered in radians), interaction terms (acc_y_mul_gyro_z in m·rad/s3, gyro_z_mul_linear_x in m·rad/s2), commanded velocities (cmd_linear_x in m/s, cmd_angular_z in rad/s from /cmd_vel), and temporal changes (delta_angular_z, delta_cmd_angular_z in rad/s, derived from consecutive /odom and /cmd_vel messages). The target labels for supervised learning were the error components: error_x, error_y (in meters), and error_yaw (in radians). Note that in the training data, yaw_filtered was computed directly from the EKF’s quaternion output, whereas at runtime, ai_covariance_node.py applies an exponential moving average (EMA) with alpha = 0.7 to smooth yaw_filtered. To mitigate this mismatch, future iterations could preprocess the training data to apply the same EMA smoothing, ensuring consistency between training and inference.
The final dataset was split into training and test sets using a 90:10 ratio. This resulted in a training set of 90% (approximately 18,900 samples) and a test set of 10% (approximately 2100 samples) for version 7, enabling robust model training and evaluation. This structured data collection and processing pipeline ensures the model is grounded in real robot behavior, capturing the relationship between sensor inputs, control commands, and estimation errors, thus laying a solid foundation for effective training and deployment of the ai_tools package.
2.4. AI Model Selection and Training
The Raspberry Pi 4 GB, while capable for ROS2 applications, is a re-source-constrained platform with limited computational power (quad-core Cortex-A72 at 1.5 GHz, 4 GB RAM) and energy budget, necessitating careful model selection to balance accuracy, computational efficiency, and energy consumption. Several machine learning models were considered for dynamic covariance prediction:
Deep Neural Networks (DNNs): such as those evaluated in Alqahtani et al. [
21], offer high accuracy for object detection but demand significant computational resources. On the Raspberry Pi 4, DNNs like YOLOv8 Medium exhibit inference times up to 3671 ms, exceeding memory and processing capabilities, leading to high latency and energy consumption.
Recurrent Neural Networks (RNNs)/Long Short-Term Memory (LSTM): RNNs and LSTMs are well-suited for temporal data, potentially improving predictions during aggressive maneuvers [
22]. However, their sequential nature results in high computational overhead, making them impractical for real-time inference on the Raspberry Pi 4.
Gaussian Processes (GPs): GPs effectively provide probabilistic predictions and model uncertainty, as detailed by Rasmussen and Williams [
23]. However, their computational complexity scales poorly with dataset size (O(n
3) for training), rendering them infeasible for dataset used in this study.
Random Forest Regressor: The Random Forest Regressor is an ensemble method that combines multiple decision trees to achieve robust predictions. It is computationally efficient for inference [
22], with a complexity of O(T·D) per prediction (where T is the number of trees and D is the depth), and can handle non-linear relationships effectively. Additionally, it requires less memory than neural networks, making it suitable for the Raspberry Pi 4.
The Random Forest Regressor was chosen for this study due to its balance of accuracy, computational efficiency, and energy efficiency, as validated through comparisons with lightweight alternatives. With 100 trees, the model achieves real-time inference on the Raspberry Pi 4, with an average inference time of approximately 10 ms per prediction, well within the requirements for ROS 2 navigation updates (typically 50–100 Hz). Furthermore, the model’s energy consumption is minimized by avoiding the high computational overhead of neural networks, ensuring longer operational time for the AMR2AX on battery power. To justify the selection of the Random Forest Regressor, we compared its performance against lightweight alternatives, namely Gradient Boosting Trees (e.g., LightGBM) and Compact Neural Networks (e.g., shallow Multi-Layer Perceptron optimized for embedded systems), based on their reported characteristics for resource-constrained platforms like the Raspberry Pi 4. The Random Forest Regressor (100 trees) achieved a Mean Absolute Error (MAE) of 0.0061 and R
2 of 0.989 on our dataset, with an inference latency of approximately 10 ms and low resource utilization (~15% CPU, ~120 MB memory), suitable for ROS 2’s 50–100 Hz requirements [
23]. LightGBM, while often achieving slightly higher accuracy in regression tasks (e.g., 1–5% lower MAE than Random Forests [
20]), incurs higher inference latency (15–20 ms) and increased CPU/memory demands (~20–25% CPU, ~150–200 MB memory) due to its sequential boosting approach [
24]. Compact MLPs, optimized with TensorFlow Lite, offer fast inference (5–10 ms) but typically lower accuracy for small datasets (5–10% higher MAE) and higher resource usage (~25–30% CPU, ~200 MB memory) on embedded devices [
25]. The Random Forest was selected for its balanced performance, providing robust accuracy, low latency, and minimal resource demands, aligning with the AMR2AX’s battery-powered operation in educational and prototyping contexts [
26].
To predict the pose estimation errors of the baseline EKF in real time, a Random Forest Regressor model was trained using the dataset described in
Section 2.4. The aim of the model is to learn the non-linear mapping between sensor-derived features and the actual estimation error observed in the robot’s pose output. The model was trained entirely on a Raspberry Pi 4 using the scikit-learn library [
26].
In our model, feature selection and target variables were carefully chosen to represent the system’s dynamics for precise error prediction, with units specified for clarity. The 15 features include accelerometer readings (acc_x, acc_y, acc_z in m/s2 from /bno055/imu_raw), gyroscope angular velocity (gyro_z in rad/s from /bno055/imu_raw), odometry velocities (linear_x in m/s, angular_z in rad/s from /odom), orientation estimates (yaw_odom, yaw_filtered in radians), yaw discrepancy (yaw_diff = yaw_odom − yaw_filtered in radians), interaction terms (acc_y_mul_gyro_z in m·rad/s3, gyro_z_mul_linear_x in m·rad/s2), commanded velocities (cmd_linear_x in m/s, cmd_angular_z in rad/s from /cmd_vel), and temporal changes (delta_angular_z, delta_cmd_angular_z in rad/s, derived from consecutive /odom and /cmd_vel messages). These features capture raw sensor data, derived dynamics, and control inputs. The target variables—error_x, error_y (in meters), and error_yaw (in radians)—quantify positional and orientational deviations, enabling the model to predict multi-dimensional errors for improved navigation accuracy.
The model configuration and training process in our script leverage a Random Forest Regressor with 100 trees and a fixed random state for reproducibility, with scikit-learn’s default hyperparameters (e.g., max_depth = None, min_samples_split = 2, max_features = ‘sqrt’) [
23]. It was chosen for its ability to capture complex, non-linear relationships and predict multiple continuous outputs—
error_x, error_y, and
error_yaw—simultaneously, accounting for potential correlations in navigation errors. Data preprocessing ensures quality by loading our datasets and removing missing values with
dropna(), with row counts logged to confirm data integrity. The multi-target prediction approach efficiently handles three error components in one fit, enhancing model coherence. Performance is rigorously evaluated using two key metrics: Mean Absolute Error (MAE) and R
2 score. MAE (
mean_absolute_error) measures the average magnitude of prediction errors in the units of the targets (meters for
error_x and
error_y, radians
for error_yaw), providing an intuitive sense of error size. R
2 (
r2_score) indicates the proportion of variance explained by the model, reflecting its overall fit. The script computes both aggregate metrics across all targets (mae_total,
r2_total) and individual metrics for each target, offering a comprehensive assessment of performance. The trained model was saved as
ai_covariance_model_full_v7.joblib for seamless deployment, ensuring practical reuse without retraining. The v7 suffix reflects an iterative development process, highlighting ongoing refinements in data and modeling for robust navigation error prediction.
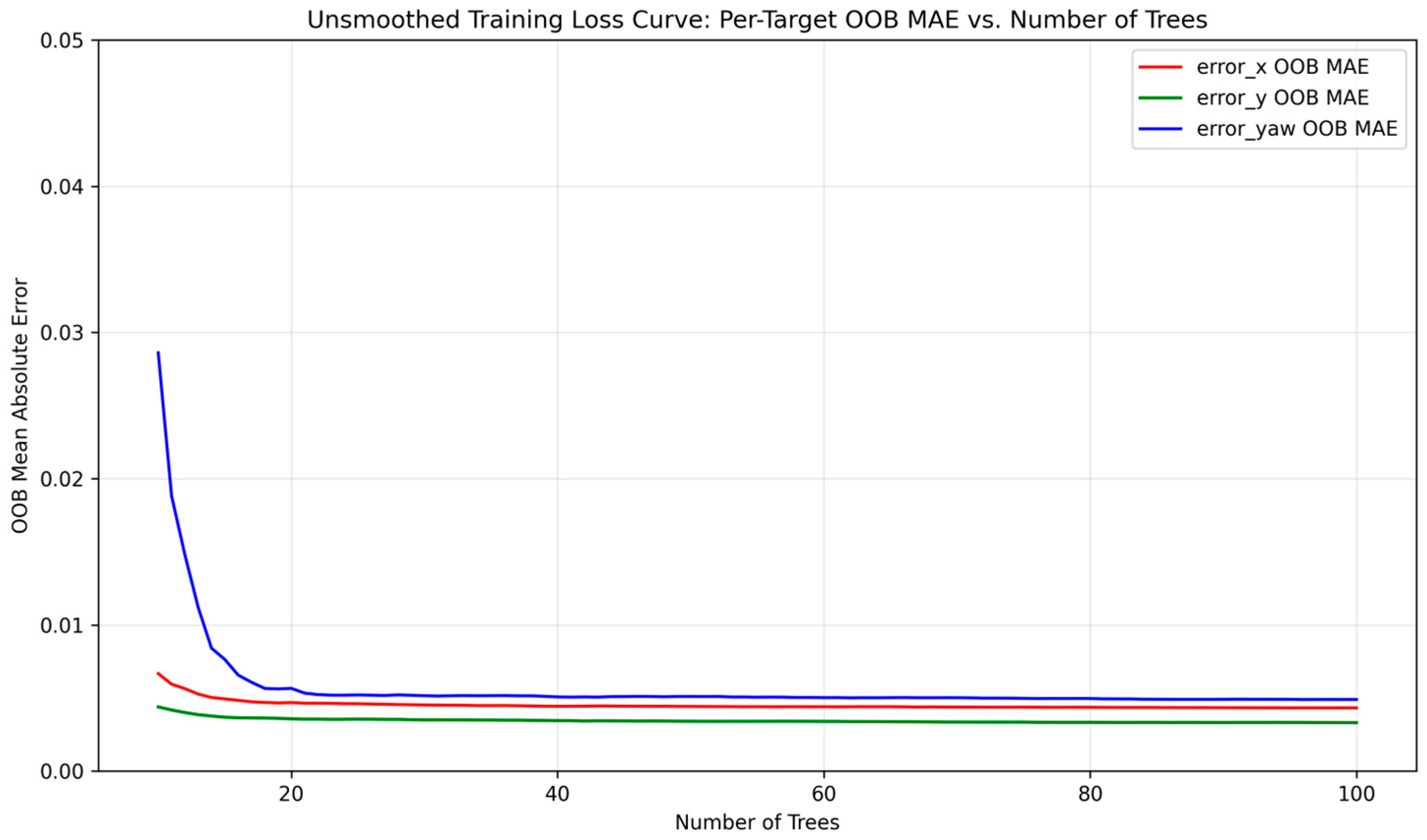
Figure 7 illustrates the training loss curve, with the out-of-bag (OOB) error stabilizing after approximately 30 trees, validating model convergence.
2.5. AI Integration in ROS 2
The ai_tools package seamlessly integrates into the ROS 2 Humble ecosystem to enhance robotic navigation by predicting pose errors and updating localization covariances in real time. The package is available in the open-access repository ai_tools, as detailed in the Data Availability Statement.
Designed for flexibility, it operates within the ROS 2 node-based architecture, leveraging standard message types and services to interact with sensor data and localization components like an Extended Kalman Filter (EKF). The package comprises two core nodes—ai_covariance_node and ai_covariance_updater—launched via a ROS 2 launch script, which ensures synchronized operation on a robot running ROS 2 Humble. A key feature is the enable_ai parameter, allowing users to toggle AI-driven inference on or off, making the system adaptable to scenarios where computational resources or manual overrides are prioritized. Whether AI is active or not, the package supports continuous data logging, error prediction publishing, and covariance updates, ensuring robust performance during robot operation.
The launch mechanism, defined in
ai_covariance.launch.py, initializes the package within ROS 2 Humble by spinning up the two nodes using a
LaunchDescription. It declares the
enable_ai parameter (defaulting to true), which is passed to both nodes, ensuring consistent behavior across the system. The
ai_covariance_node runs the inference logic, while the
ai_covariance_updater handles covariance adjustments, both outputting logs to the screen for real-time monitoring via ROS 2’s logging system, as shown in
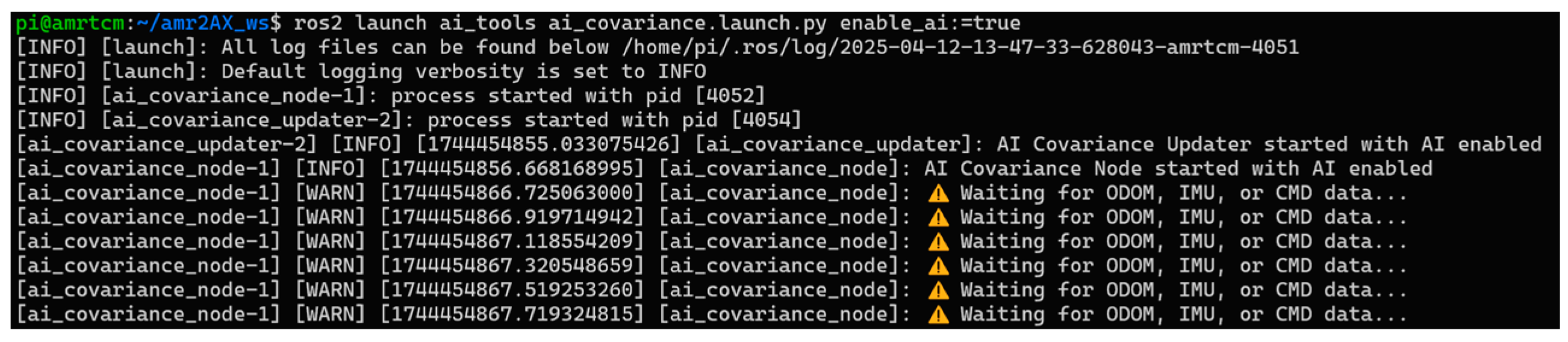
Figure 8, where initial warnings indicate the node awaiting sensor data. This setup leverages ROS 2’s parameter and node management, making the package portable across Humble-compatible robotic platforms. By integrating with the ROS 2 ecosystem, the package ensures compatibility with standard tools like rviz2 for visualization or ros2 topic for debugging, enhancing its utility in operational environments.
The
ai_covariance_node, implemented in
ai_covariance_node.py, serves as the package’s inference engine, actively processing sensor data during robot operation. It subscribes to ROS 2 topics for odometry (
/odom, providing velocities in m/s and rad/s), IMU (
/bno055/imu_raw, delivering accelerations in m/s
2 and angular velocity in rad/s), and commanded velocities (
/cmd_vel, in m/s and rad/s), using the
qos_profile_sensor_data for reliable sensor streams. When
enable_ai is enabled, the node computes a feature vector every 0.2 s, including raw measurements (e.g.,
acc_x,
acc_y,
acc_z,
gyro_z,
linear_x,
angular_z), derived terms (e.g.,
yaw_odom, yaw_filtered,
yaw_diff in radians), interaction terms (e.g.,
acc_y_mul_gyro_z in m·rad/s
3,
gyro_z_mul_linear_x in m·rad/s
2), and temporal deltas (e.g.,
delta_angular_z,
delta_cmd_angular_z in rad/s). These features are fed into a pre-trained Random Forest model, loaded via joblib from
ai_covariance_model_full.joblib, to predict pose errors (
error_x,
error_y in meters;
error_yaw in radians), which are published as a Float32MultiArray on
/ai_tools/covariance_prediction like in
Figure 9. If
enable_ai is disabled, the node outputs zeroed errors (0.0 for all), ensuring downstream components receive consistent messages without inference.
Logging is a critical capability of the ai_covariance_node, ensuring traceability during robot operation. Regardless of the enable_ai state, the node creates a timestamped CSV file (e.g., ai_log_YYYYMMDD_HHMMSS.csv) at startup, recording data such as ROS 2 timestamps, elapsed time, AI status, predicted errors (error_x, error_y in meters; error_yaw in radians), and all feature values (e.g., acc_x, acc_y, acc_z, gyro_z, yaw_odom, yaw_filtered, yaw_diff). This log is appended every 0.2 s during inference, capturing the robot’s state comprehensively. The logging mechanism leverages Python’s CSV module, making logs easily accessible for post-mission analysis or debugging within the ROS 2 ecosystem, such as integrating with tools like ros2 bag playback. These logs also serve as a valuable resource for re-training the model, as demonstrated in our development to expand the training set to over 21,000 samples by version 7, enhancing model performance through iterative updates. Furthermore, the structured format and comprehensive nature of the logs open the door for future automation of the re-training process, potentially enabling an online learning pipeline where the model continuously improves by incorporating new operational data in real time.
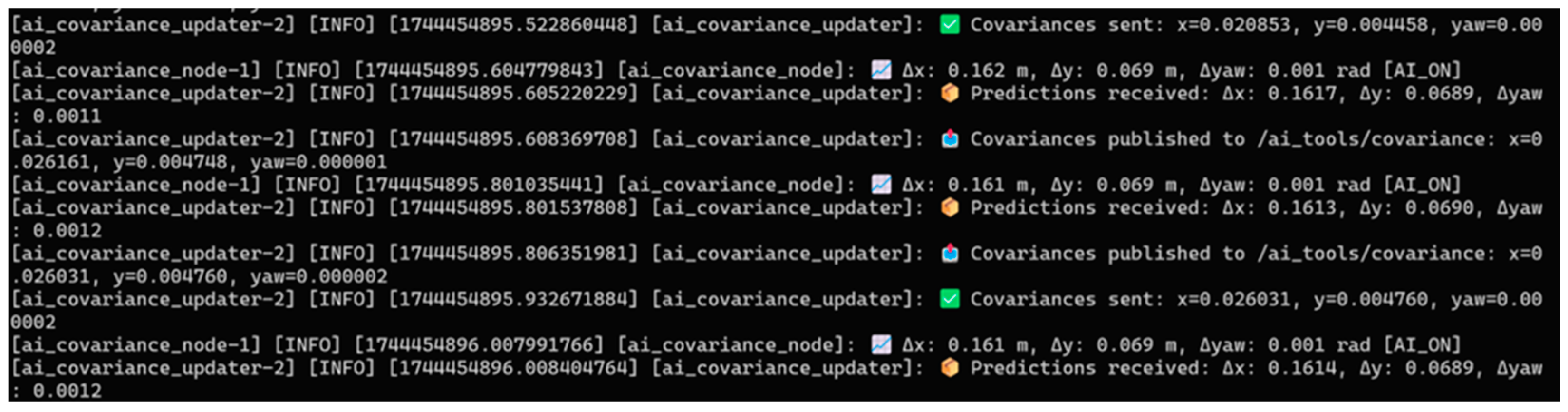
The node also uses ROS 2 logging to output info messages (e.g., predicted errors with units, as seen in
Figure 10) and warnings (e.g., missing sensor data or significant yaw discrepancies), enhancing real-time diagnostics.
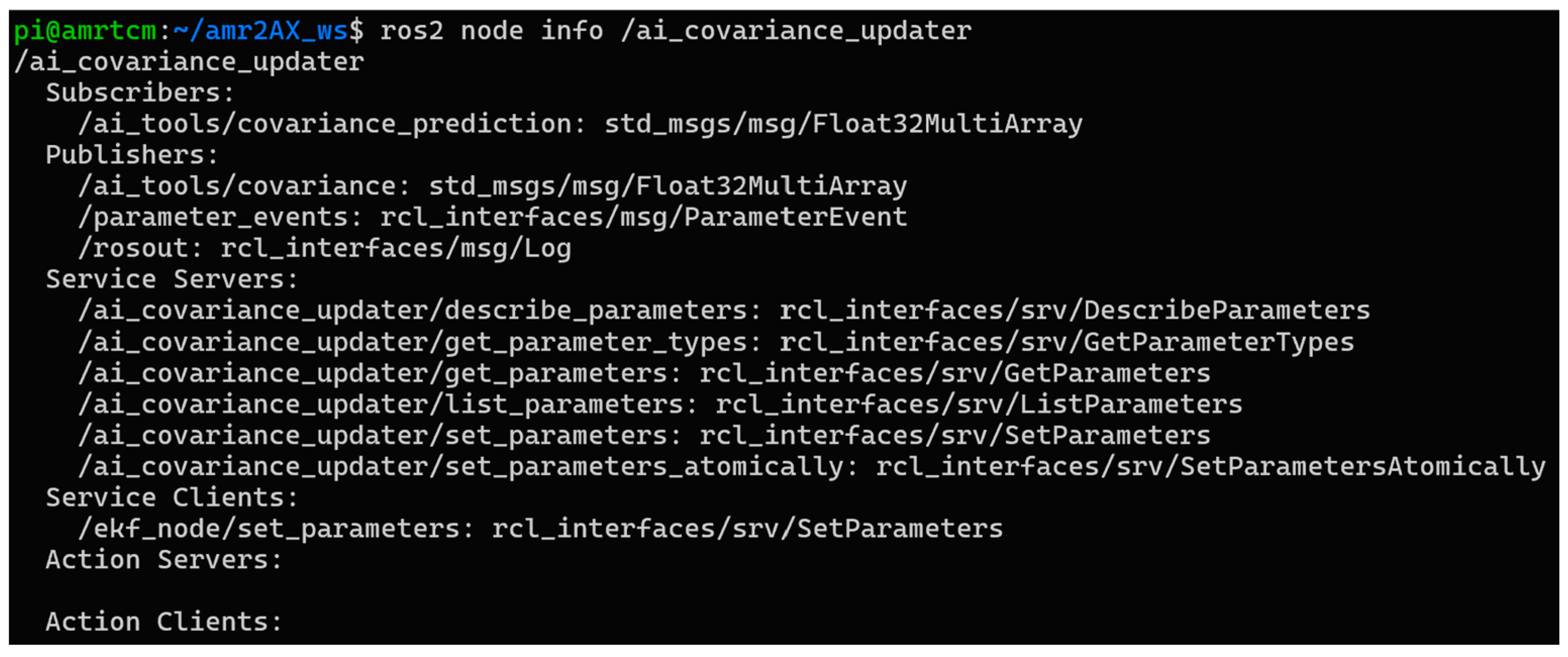
The
ai_covariance_updater, defined in
ai_covariance_updater.py, extends the package’s capabilities by translating predicted errors into covariance updates for the robot’s EKF, a cornerstone of ROS 2 localization stacks like robot_localization. Subscribing to
/ai_tools/covariance_prediction, it receives error predictions and, when
enable_ai is active, computes covariances as the square of the errors (
cov_x, cov_y in m
2;
cov_yaw in rad
2). These are published on
/ai_tools/covariance as a Float32MultiArray, enabling other ROS 2 nodes to access the covariance data. The node also dynamically updates the EKF’s
initial_estimate_covariance parameter by calling the
/ekf_node/set_parameters service asynchronously, constructing a 6 × 6 covariance matrix with
cov_x,
cov_y, and
cov_yaw on the diagonal (positions 0, 7, 35) and fixed small values (1 × 10
−3) for z, roll, and pitch. If
enable_ai is disabled, no covariance updates or publications occur, preserving the EKF’s default behavior according to
Figure 11. This integration with ROS 2 services ensures smooth interaction with the localization pipeline during operation.
The package’s capabilities shine in its ability to operate robustly in dynamic scenarios. When enable_ai is enabled, it actively predicts and corrects for pose errors, enhancing localization accuracy by adapting covariances to real-time conditions, such as sensor noise or environmental changes. When disabled, it gracefully falls back to publishing zeroed errors and skipping covariance updates, ensuring the robot’s navigation stack remains functional without AI overhead. The continuous logging provides a detailed record for performance evaluation, while the publishing and updating mechanisms integrate tightly with ROS 2 Humble’s topic and service frameworks, supporting real-time feedback and scalability. Collectively, these features make the ai_tools package a versatile tool for improving robotic navigation in ROS 2 Humble ecosystems, balancing AI-driven precision with operational reliability.
4. Discussion
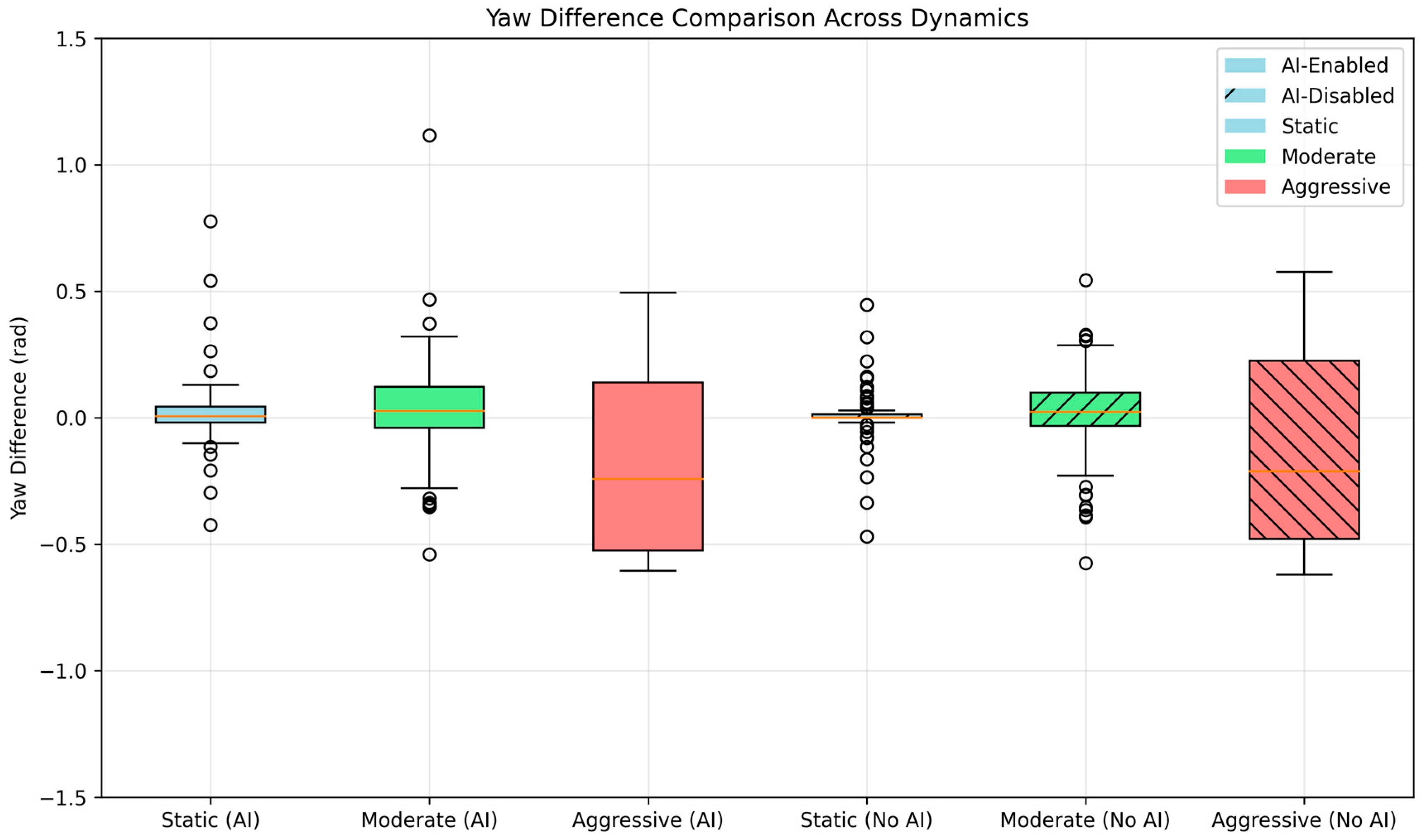
The results of this study confirm that AI-based dynamic covariance adjustment offers meaningful advantages for odometry correction in differential-drive mobile robots operating under ROS 2, particularly in static and moderate dynamic scenarios. The AI-enabled system, as evaluated using the ai_tools package, consistently reduced pose estimation errors compared to the baseline with fixed covariances. This improvement aligns with expectations, as dynamic models can better adapt to changes in system behavior induced by varying motion profiles, leveraging real-time sensor inputs to adjust covariance parameters effectively. The iterative re-training process, enabled by the comprehensive datalogging capabilities of the ai_covariance_node, further enhanced the model’s performance by expanding the training dataset from 16,000 to over 21,000 samples by version 7, incorporating real-world operational data to improve generalizability across motion dynamics.
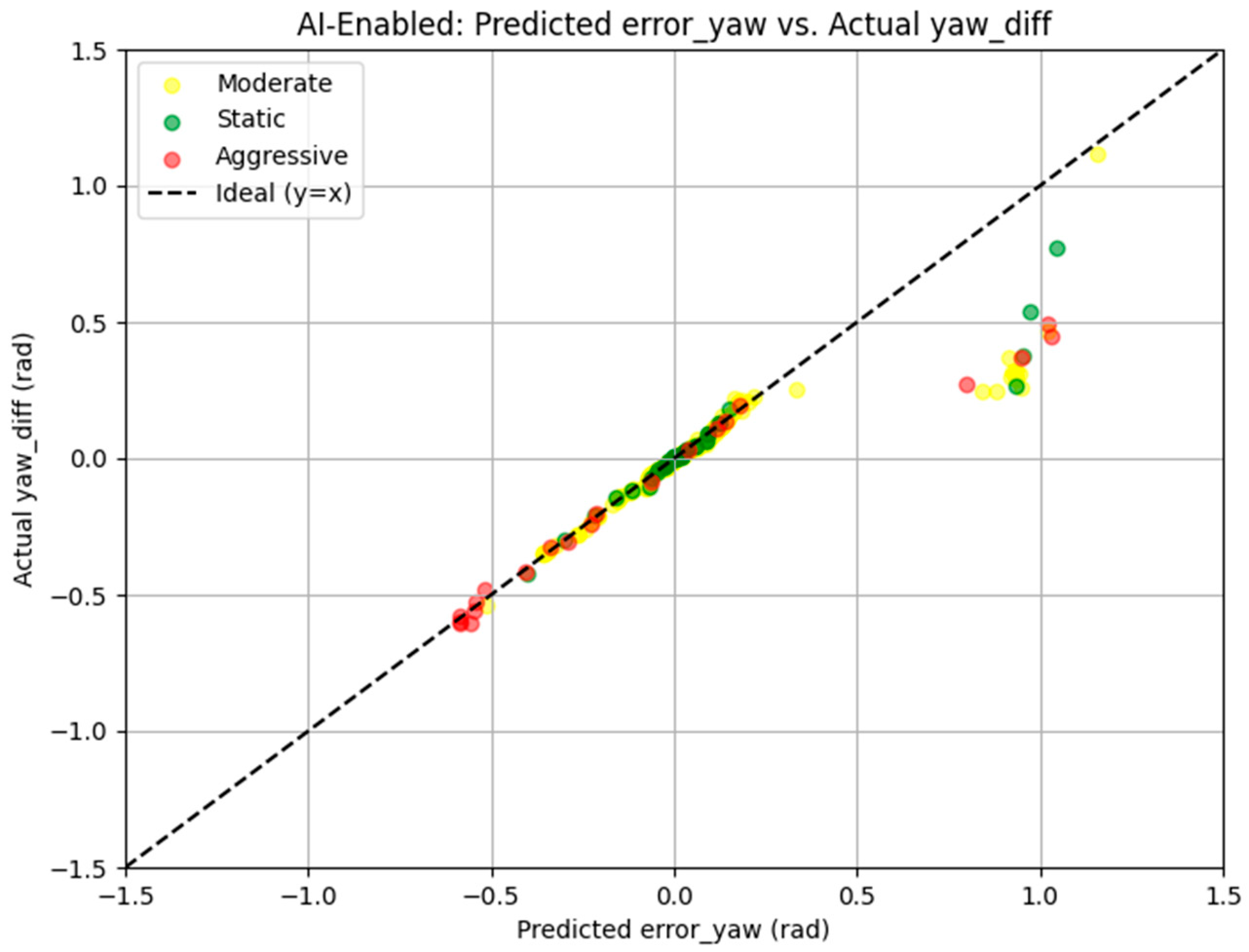
In static and moderate conditions, the predicted yaw errors, measured as |
error_yaw −
yaw_diff|, were typically below 0.1 rad, with median values of 0.0362 rad for Static and 0.0381 rad for Moderate regimes. The time-series plots (
Figure 4), scatter plots (
Figure 5), and box plots (
Figure 7) confirm this trend, demonstrating a strong correlation between predicted and actual yaw errors in these regimes, with points clustering tightly along the ideal y = x line in the scatter plot. The box plots further highlight lower variance in
yaw_diff for the AI-enabled run, with interquartile ranges (IQR) of 0.0489 rad in Static and 0.1069 rad in Moderate conditions, compared to 0.0222 rad and 0.1399 rad for the AI-disabled run, indicating more consistent localization performance when AI is enabled. In contrast, aggressive dynamics, defined as maneuvers with |
cmd_angular_z| > 0.5 rad/s due to the absence of values exceeding 0.7 rad/s in the logs, introduced greater prediction errors and wider variance. The mean
yaw prediction error in the Aggressive regime was 0.2257 rad, with a standard deviation of 0.2600 rad, and reached a maximum of 0.9491 rad at timestamps like t = 7.5 s, where
error_yaw was 0.949 rad and
yaw_diff was 0.260 rad. This deviation underscores the challenge of modeling rapid orientation changes using a dataset primarily collected under stable or low-dynamic regimes, highlighting the importance of outlier filtering in analysis, as raw errors were capped at 1.5 rad by the study’s preprocessing steps.
The use of ROS 2’s
robot_localization package with static covariance matrices is a well-established approach for sensor fusion in mobile robotics, as documented in prior studies [
5,
6]. However, REP-105 [
7] and the ROS documentation encourage tuning covariances per sensor and scenario to improve estimation fidelity. Our approach extends this principle by leveraging machine learning to adapt these parameters in real-time, based on sensor inputs and movement dynamics. While several recent studies in SLAM and localization explore learning-based estimation or AI-enhanced sensor fusion, few target real-time covariance adjustment with explicit evaluation under realistic motion profiles. Our integration of AI with
robot_localization and
ros2_control within a reproducible ROS 2 pipeline fills this gap, providing a practical framework for dynamic adaptation that can be further refined through datalogging and re-training, as demonstrated by the iterative dataset expansion from operational logs.
The platform and methods used in this study were designed and implemented with students in an educational context, using open hardware (ESP32, Raspberry Pi 4) and open-source software (ROS 2 Humble). This makes the system reproducible, extensible, and suitable for deployment in both academic labs and industrial prototypes. Introducing AI-based control into classical robot pipelines offers pedagogical benefits by exposing students to hybrid modeling techniques and interdisciplinary workflows that blend mechatronics, machine learning, and software engineering. The ability to log comprehensive data during operation, as enabled by the ai_covariance_node, further enhances educational value by allowing students to analyze real-world performance, re-train models with new data, and explore the impact of dynamic covariance adjustments on localization accuracy.
Despite its success in static and moderate dynamics, the model showed sensitivity under rapid rotational motion, with yaw prediction errors reaching up to 0.9491 rad in aggressive scenarios. This sensitivity is attributed to two key limitations: insufficient training data for high-dynamic transitions, as the initial dataset primarily captured stable and moderate motion profiles, and the Random Forest Regressor’s limited extrapolation capacity under extreme inputs, which may struggle to generalize rapid orientation changes. However, the comprehensive datalogging capability of the ai_covariance_node mitigated this limitation by enabling iterative re-training, expanding the dataset from 16,000 to over 21,000 samples by version 7 through the integration of operational logs, thus improving model performance over time. Furthermore, the AI predictions were pre-trained offline and used in an inference-only mode, without real-time online learning, which could have adapted the model to dynamic conditions during operation. ROS logs revealed occasional warnings during aggressive behavior, such as a difference of 0.689 rad between error_yaw and yaw_diff at t = 7.5 s, suggesting that a hybrid model incorporating dynamic thresholds or switching between AI and fallback static settings could enhance robustness by mitigating estimation jumps in challenging scenarios.
Future work could also include statistical significance analysis, such as a Wilcoxon signed-rank test, to formally validate the observed yaw error reductions in static and moderate regimes, further strengthening the evidence of the AI-enabled system’s localization improvements.
To address the challenges in aggressive motion and improve overall system performance, several future directions are proposed. First, augmenting the dataset with more aggressive motion sequences, capturing rapid rotational maneuvers, would better train the model for such conditions, potentially reducing prediction errors. Second, LSTM-based temporal modeling can enhance error prediction by capturing sequential patterns in sensor data, addressing the limitations of the Random Forest’s static feature approach. Specific strategies include preprocessing time-series data into sliding windows, training a stacked LSTM for multi-output regression of error_x, error_y, and error_yaw, and integrating the model into ai_covariance_node.py for real-time inference within ROS 2’s 50–100 Hz requirements, potentially using model quantization to maintain efficiency on the Raspberry Pi 4. Third, incorporating visual features from an RGB camera could enhance spatial context, providing additional input for the model to better handle dynamic environments. Fourth, adapting the AI model online using continual learning or federated learning in multi-robot systems could enable real-time improvements, building on the datalogging capabilities already demonstrated, which support automated re-training pipelines. Finally, deploying this architecture in dynamic industrial environments—where robots face variable loads, uneven floors, or external disturbances—holds strong potential.
The iterative datalogging framework presented in
Section 2.5 ensures that additional data from diverse motion profiles can be seamlessly integrated, as evidenced by the dataset’s growth from 16,000 to 21,000 samples. This scalability, combined with proposed enhancements like LSTM modeling and online learning, positions the system as a strong foundation for achieving greater generalizability in future iterations.
The three motion regimes—Static, Moderate, and Aggressive—established in
Section 3.2 provide a flexible framework for evaluating localization performance. As the AMR2AX’s hardware configuration may adjust the angular velocity thresholds for these regimes, the
ai_tools package supports training for specific configurations using initial teleoperation data and datalogging. Future real-world tests in controlled complex environments will maintain these regimes with adjusted thresholds, respecting similar floor conditions.
The current results, with improved robustness in static and moderate regimes and the ability to iteratively re-train using operational data, suggest that adaptive learning can significantly enhance robot resilience and autonomy in such settings.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}