
Borehole Radar Experiment in a 7500 m Deep Well

Abstract
1. Introduction
2. Principles of Radar in Wells
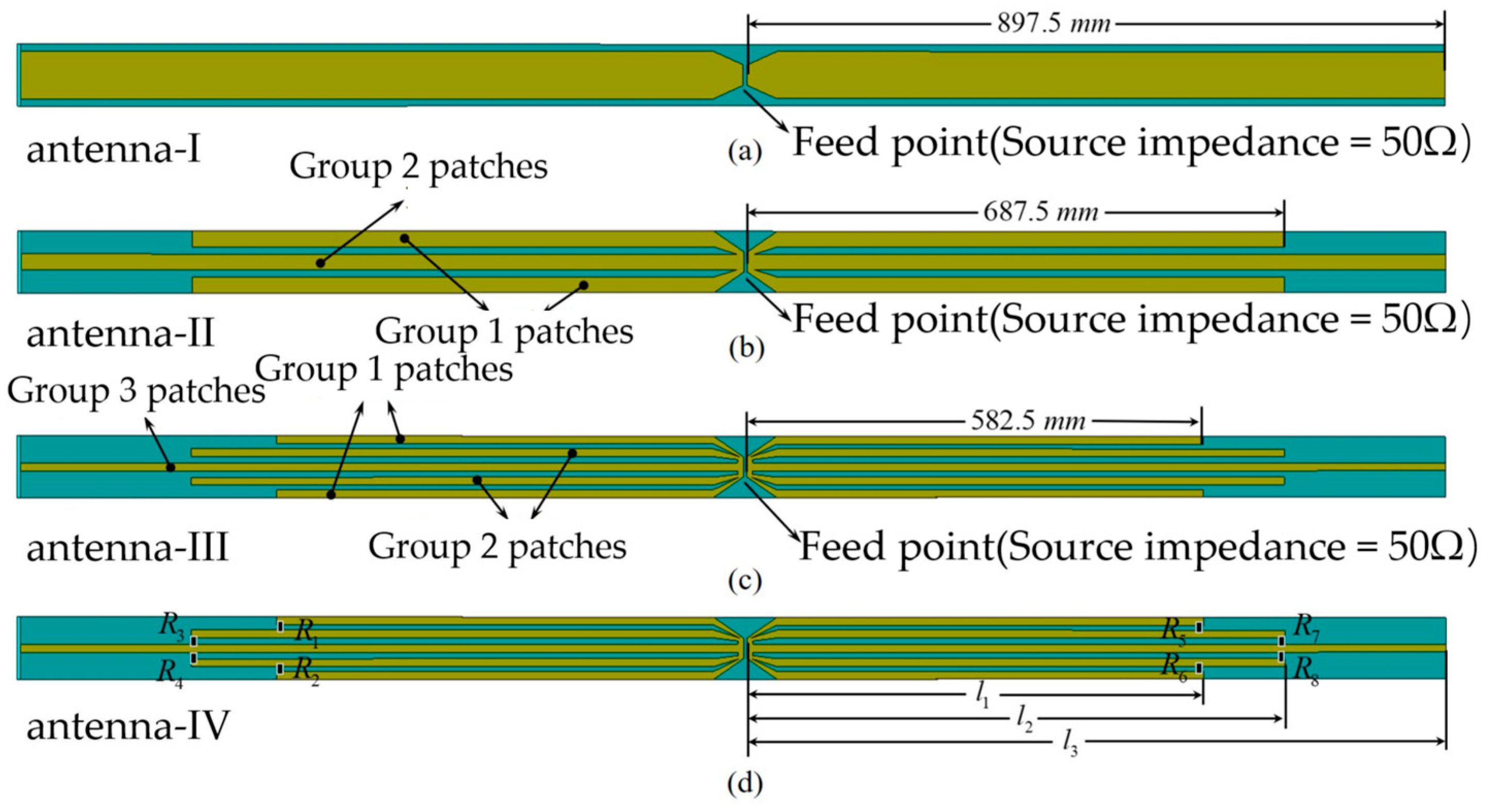
2.1. Principles of Borehole Radar Antennas
2.1.1. Antenna Characterization in a Well Environment
2.1.2. Antenna Bandwidth Enhancement Mechanism
2.2. Principles of Radar Emission
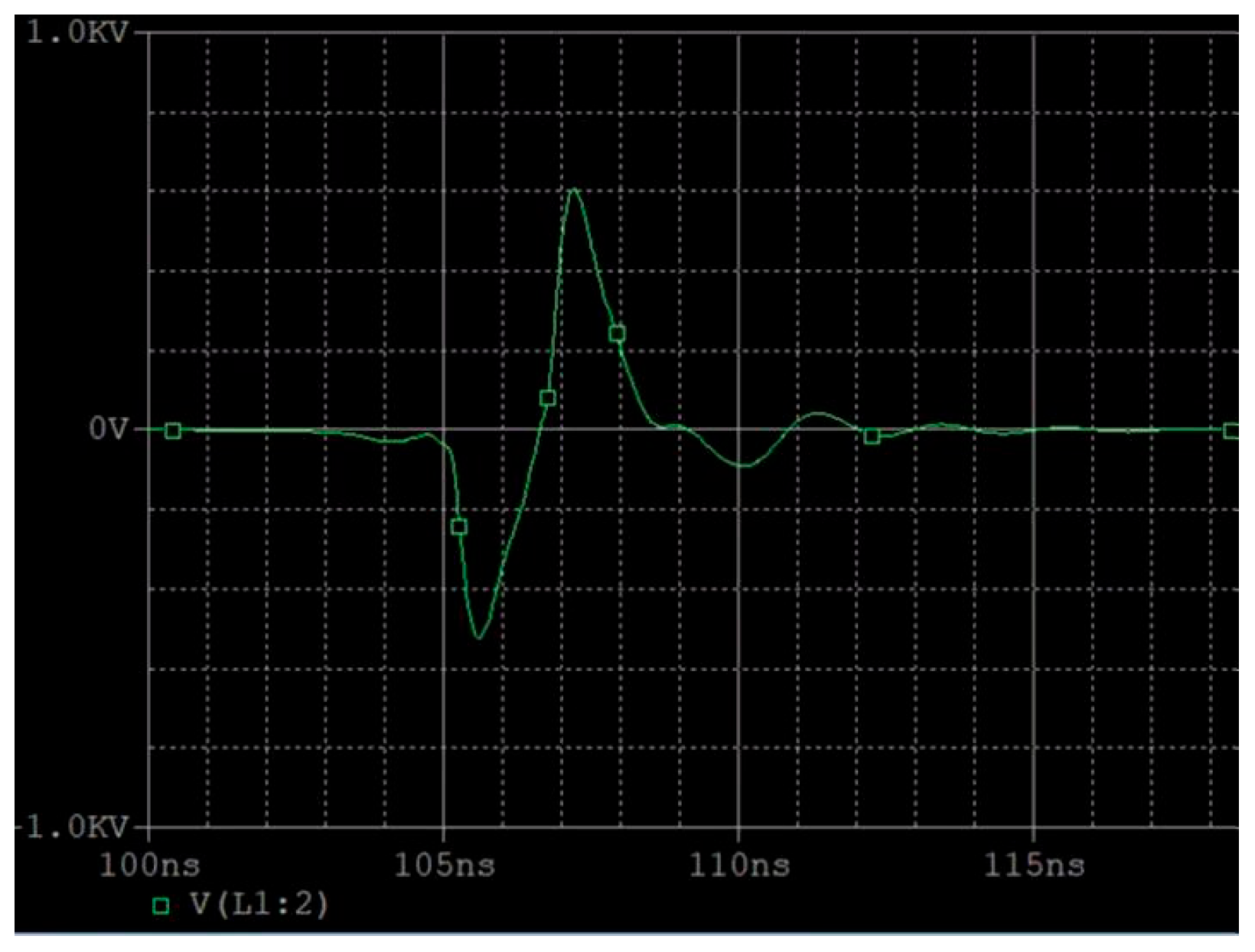
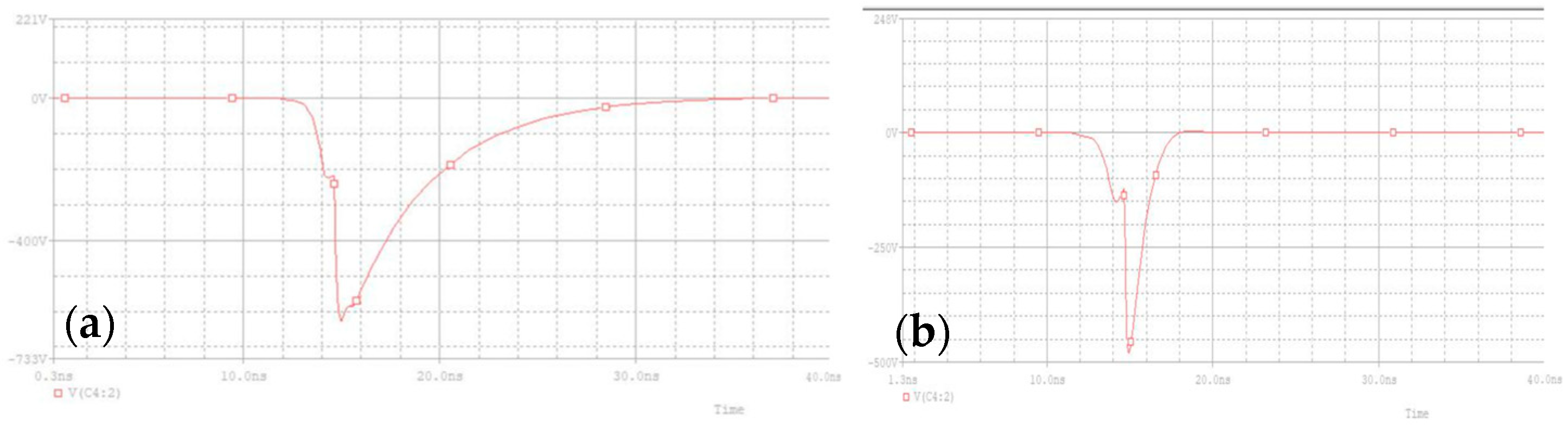
2.2.1. Principles of Pulse Signals
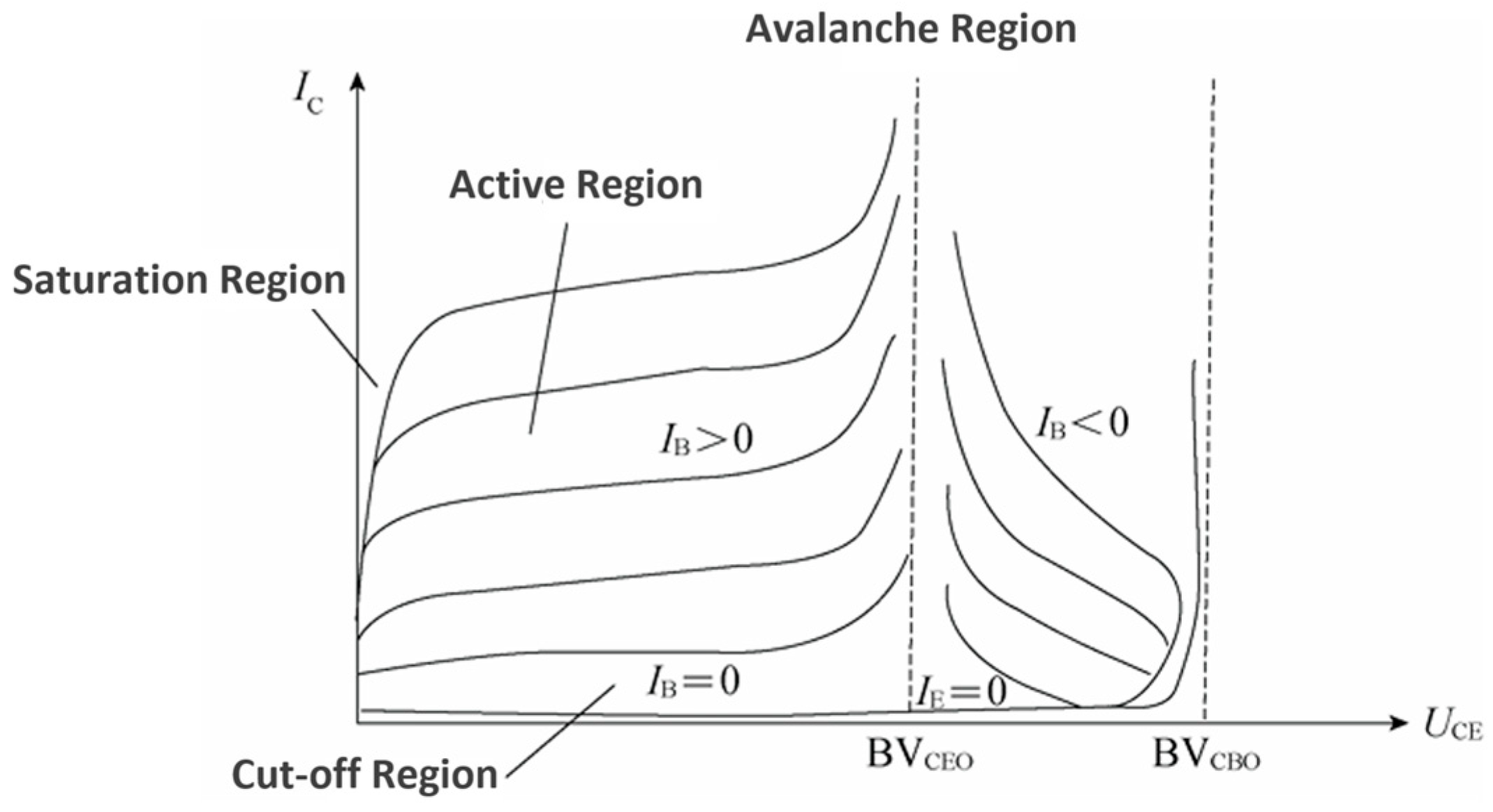
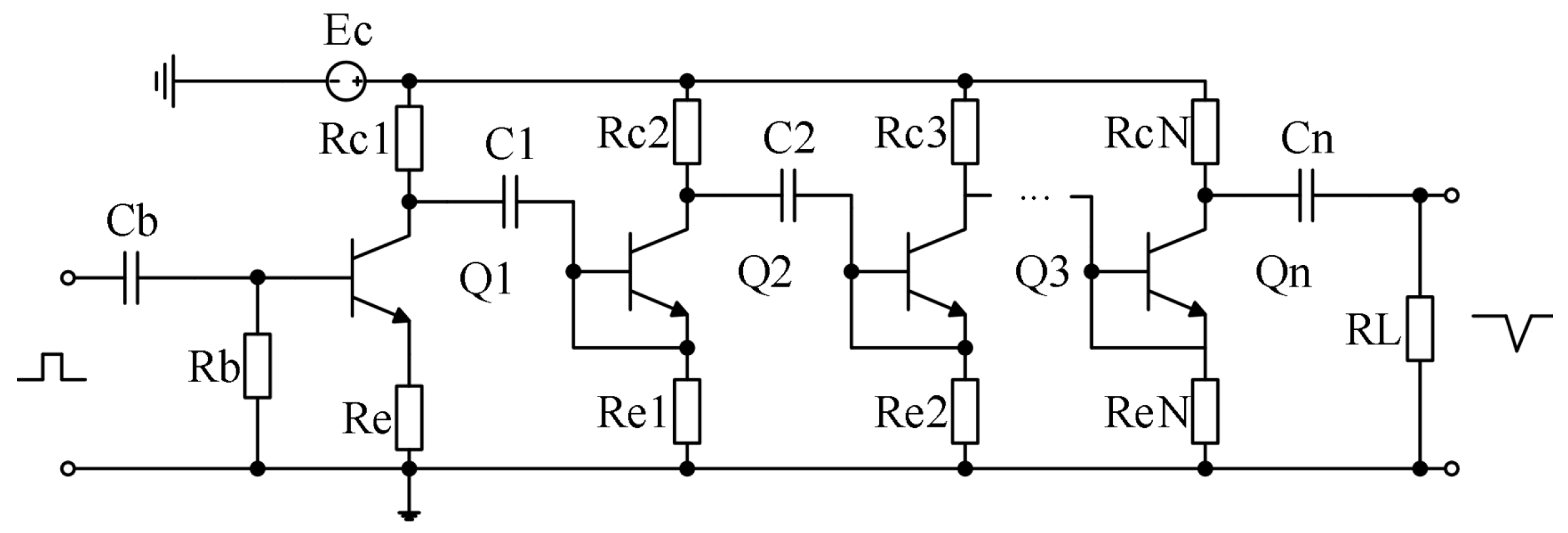
2.2.2. Pulse Signal Generation
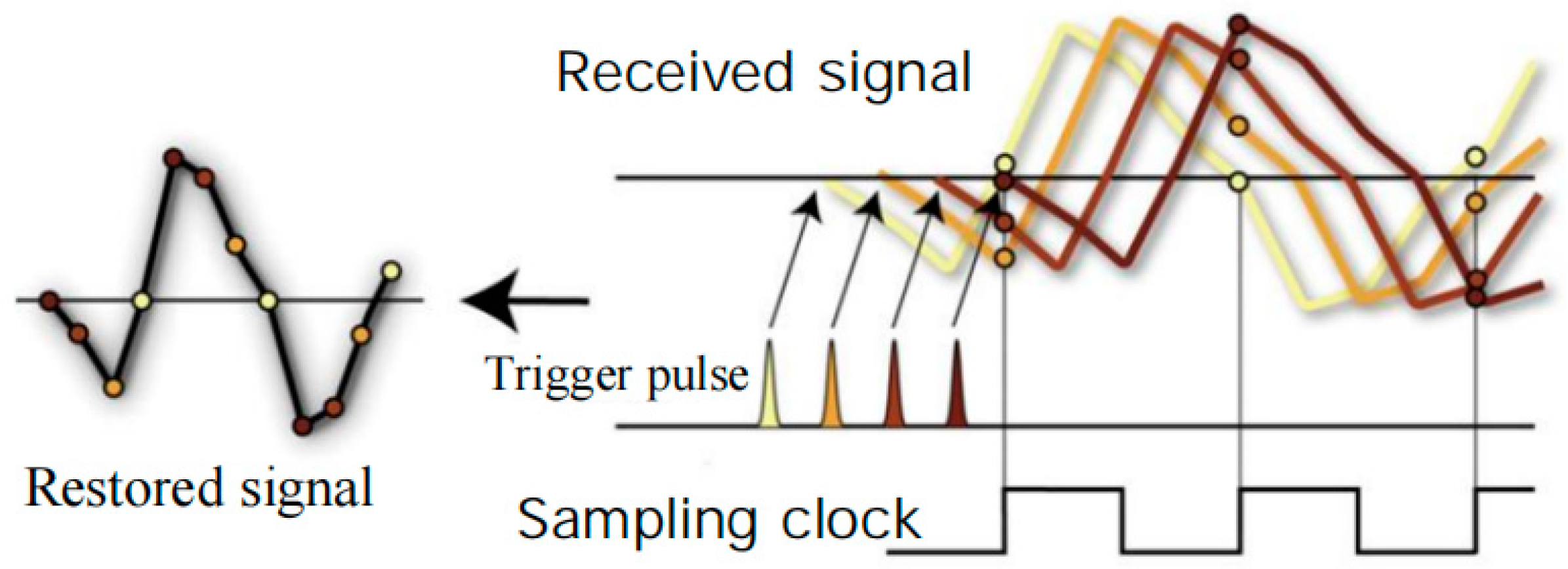
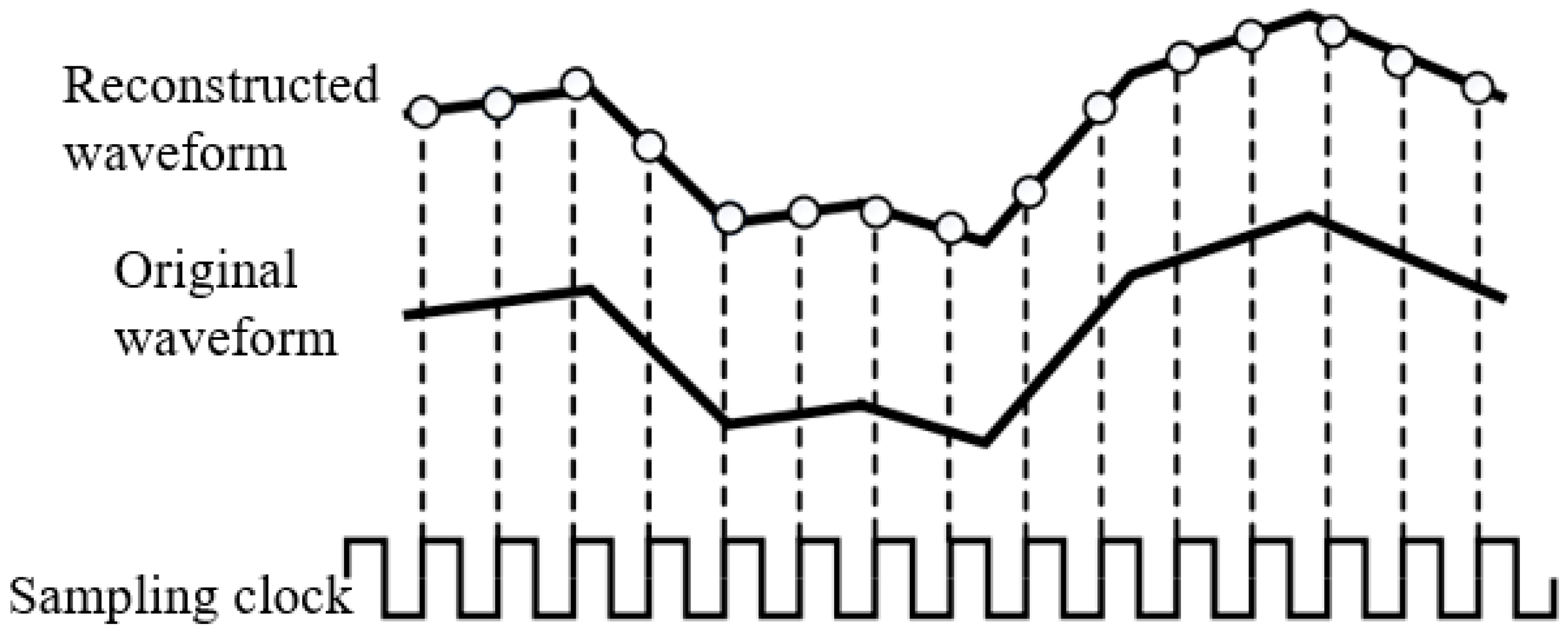
2.3. Radio Frequency (RF) Acquisition Principle
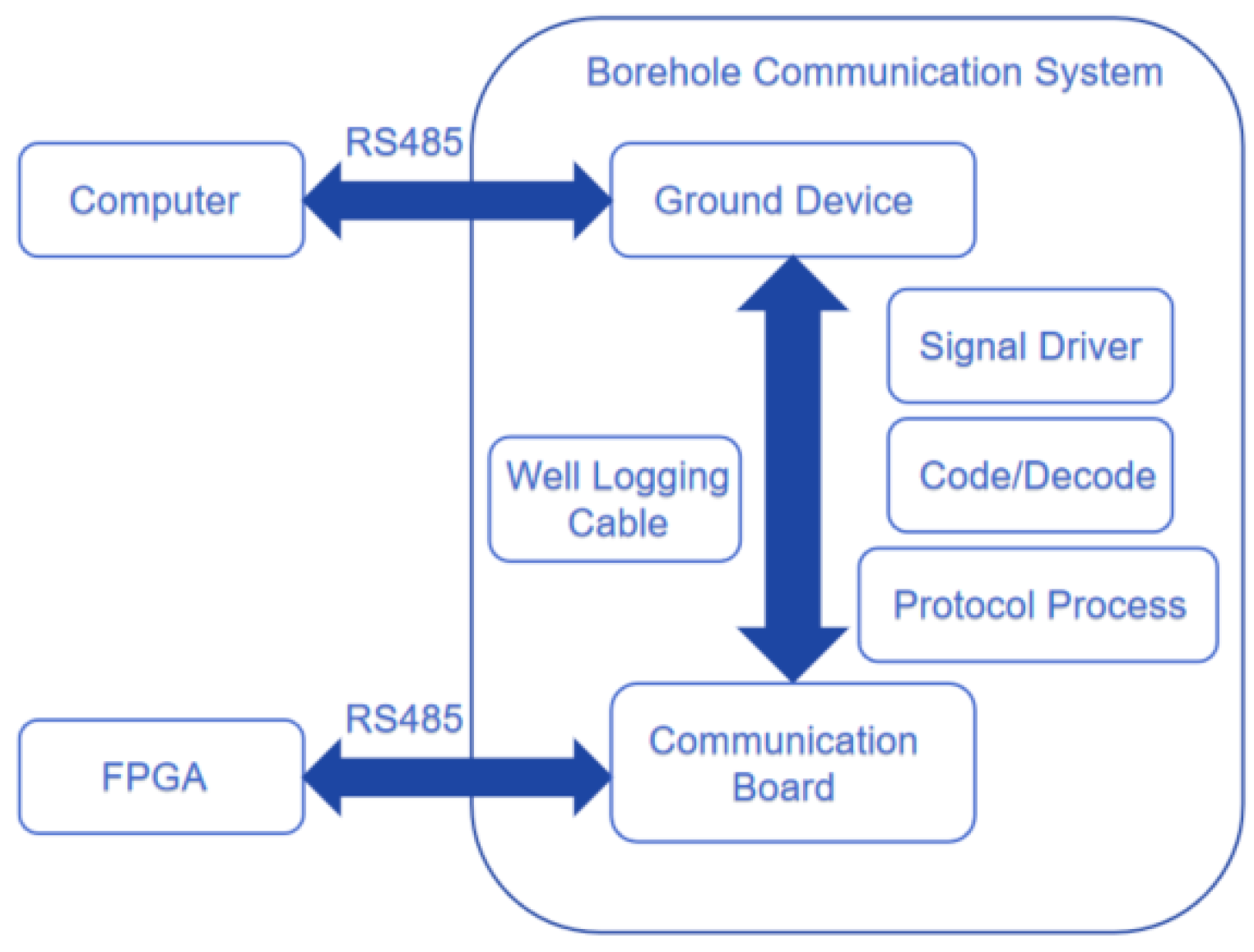
2.4. Well-Ground Communication Principles
2.4.1. Scrambling Code
2.4.2. Convolutional Coding
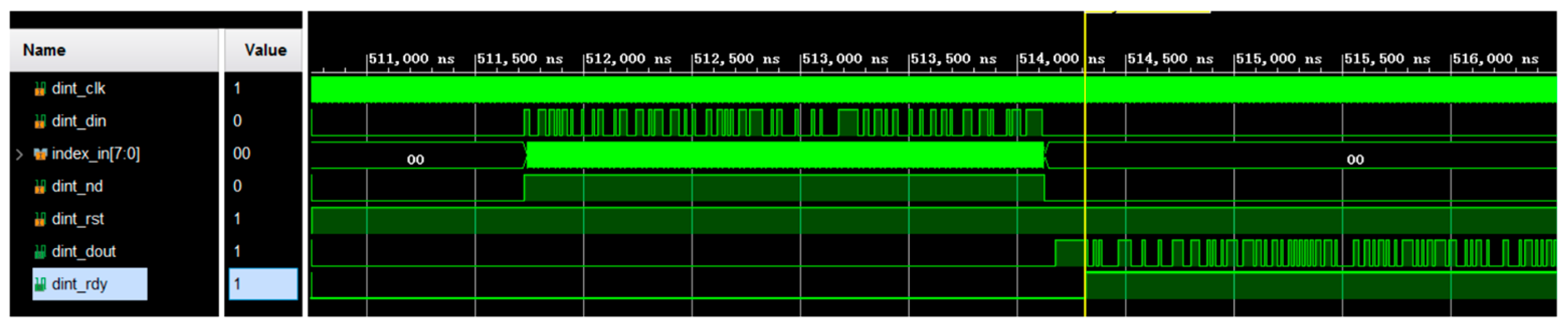
2.4.3. Interleaving
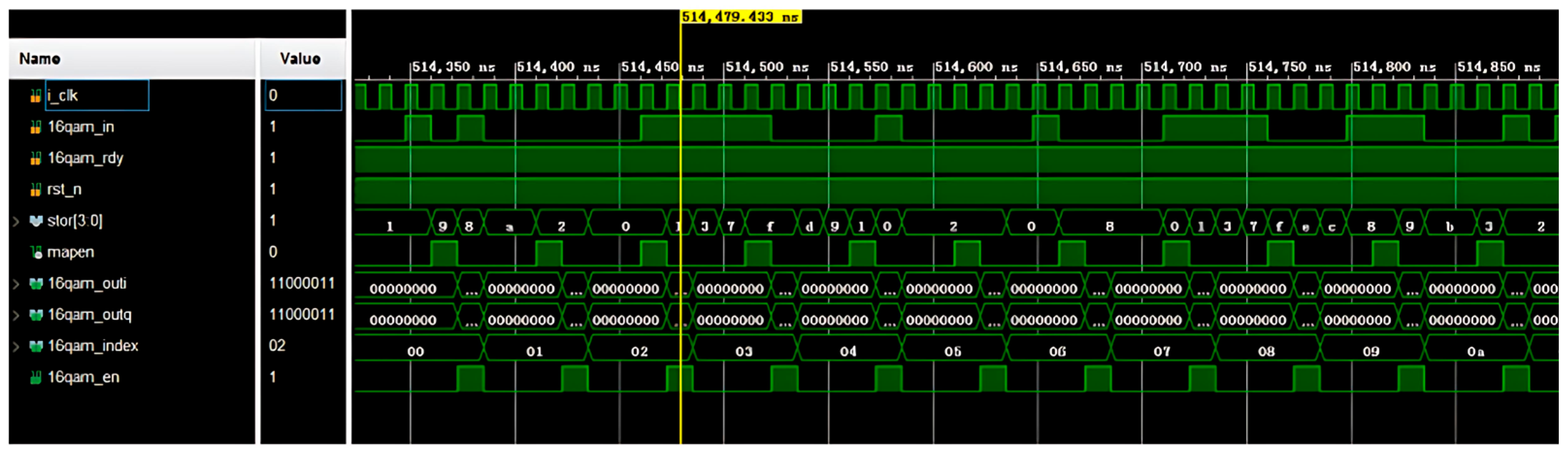
2.4.4. Quadrature Amplitude Modulation (QAM) Mapping
2.4.5. Pilot Insertion
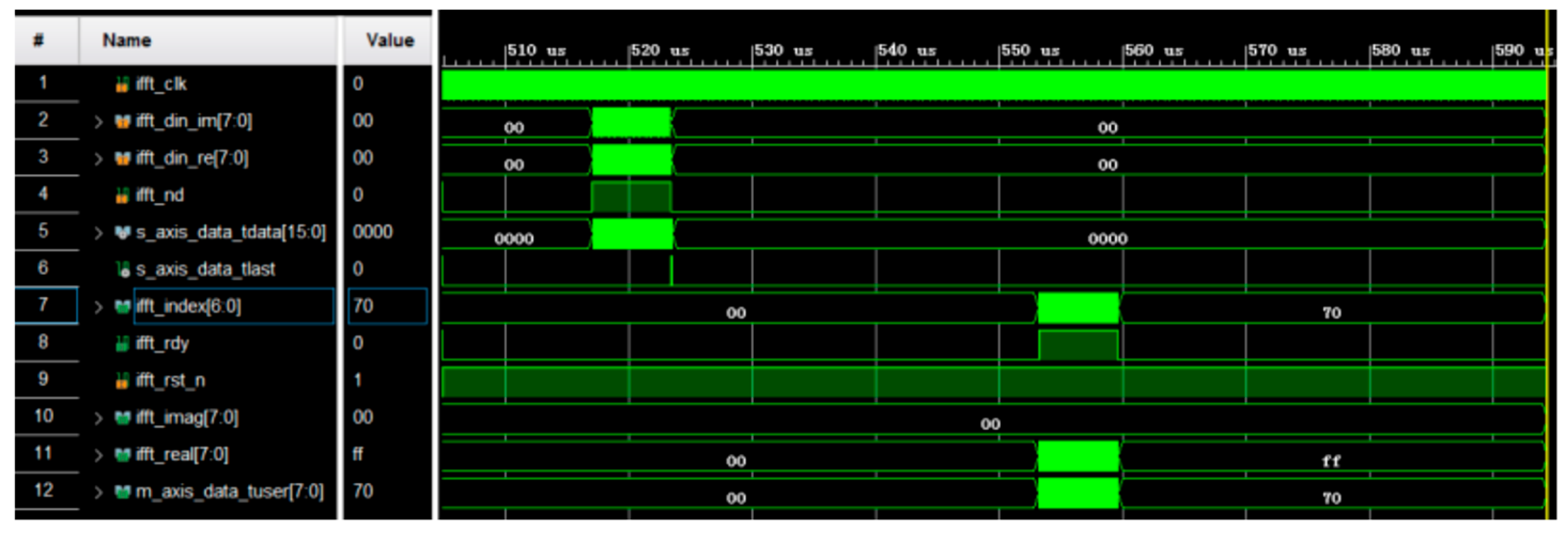
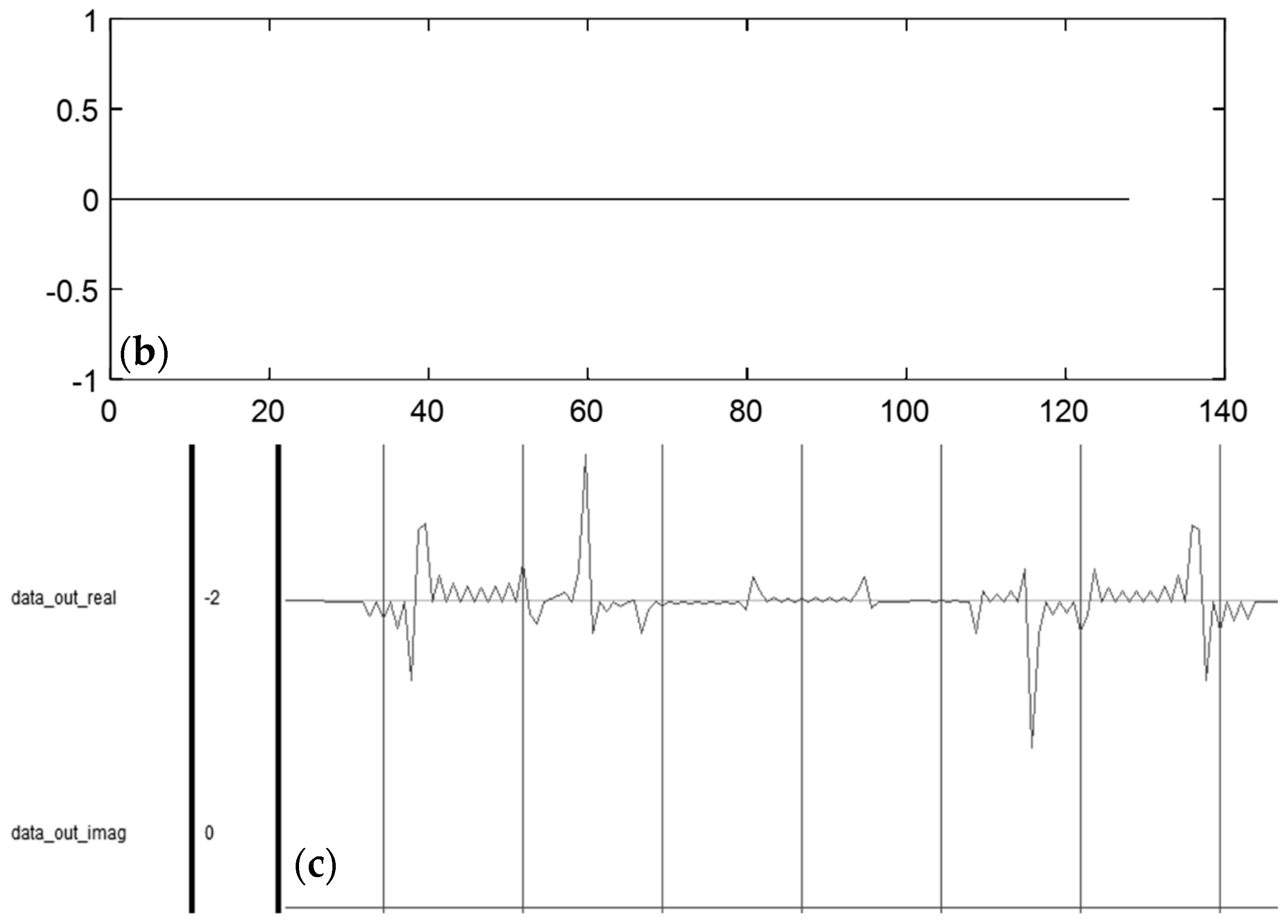
2.4.6. Inverse Fast Fourier Transform (IFFT)
3. Data Collection and Processing
3.1. Detection Data Collection in the Shunbei Region
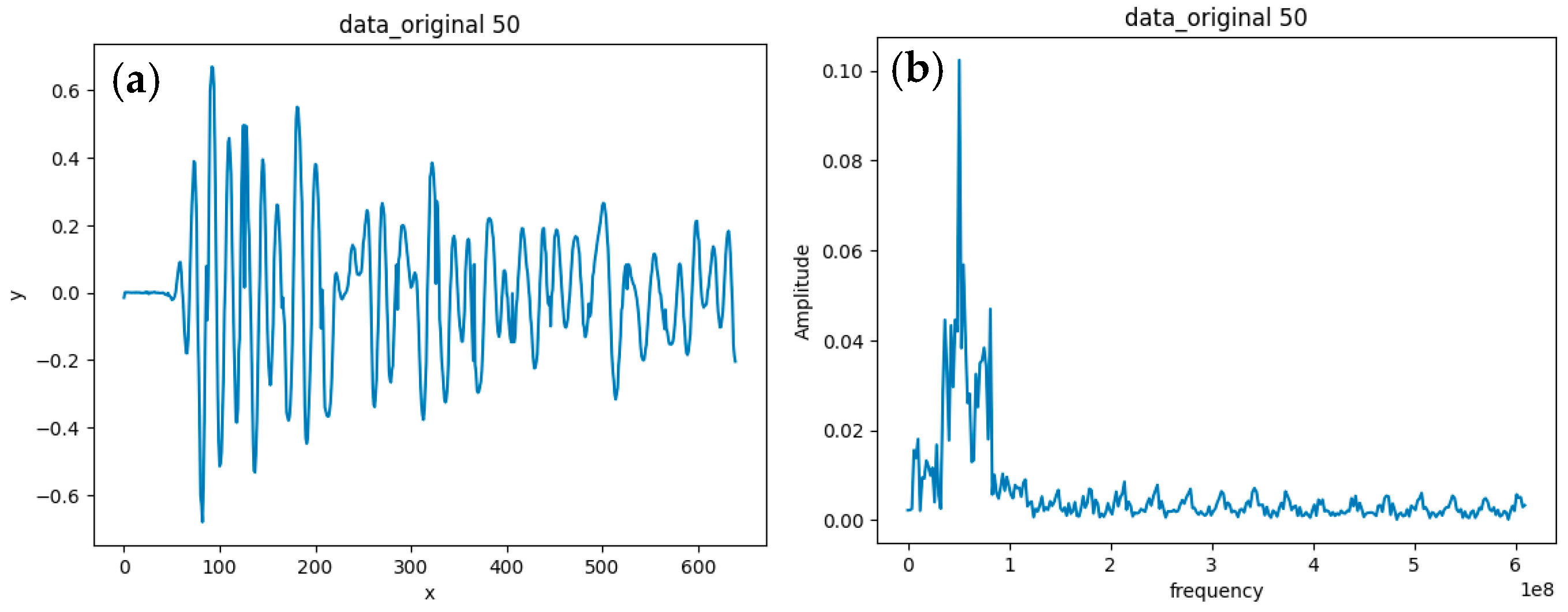
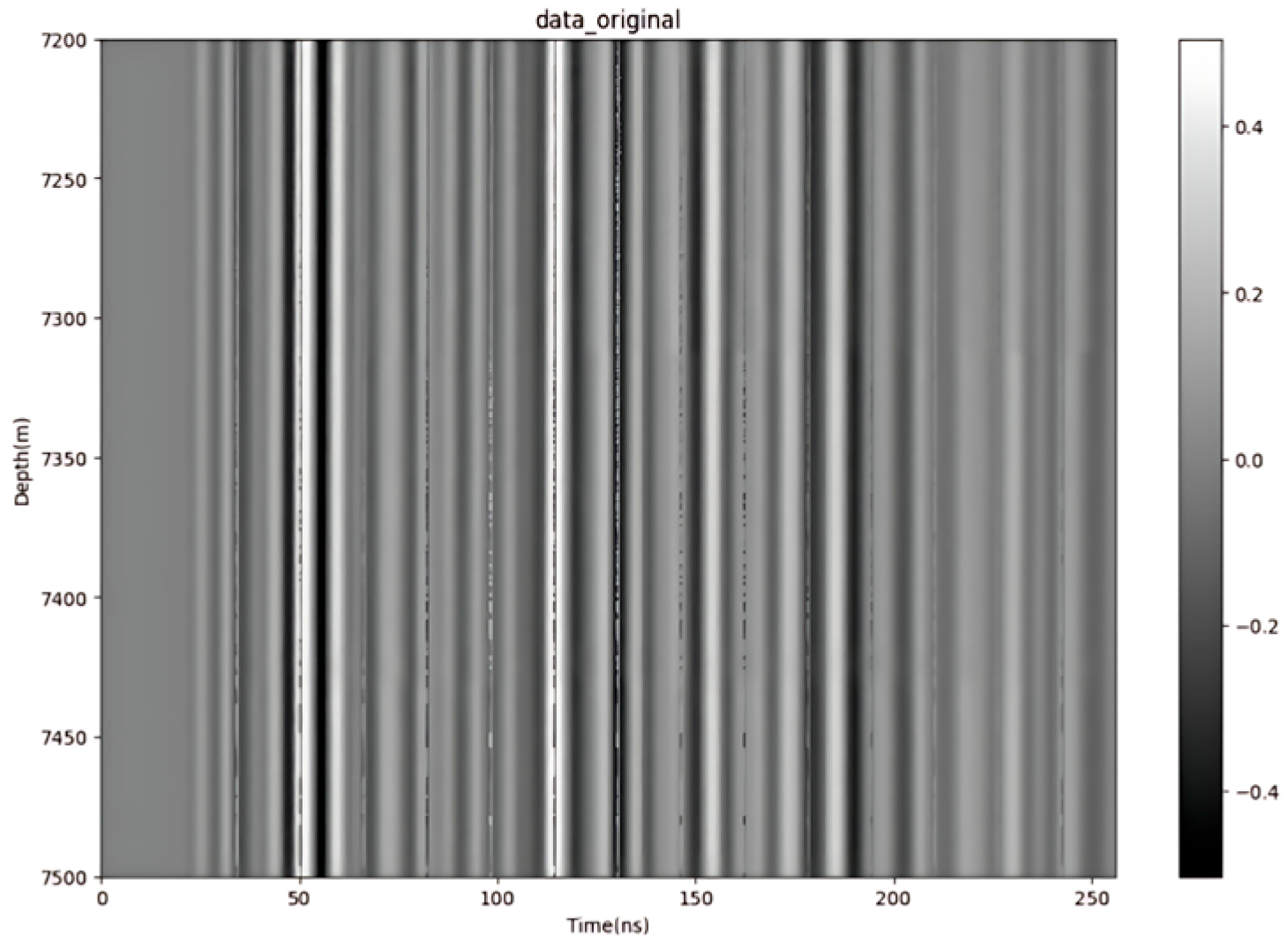
3.2. Data Preprocessing
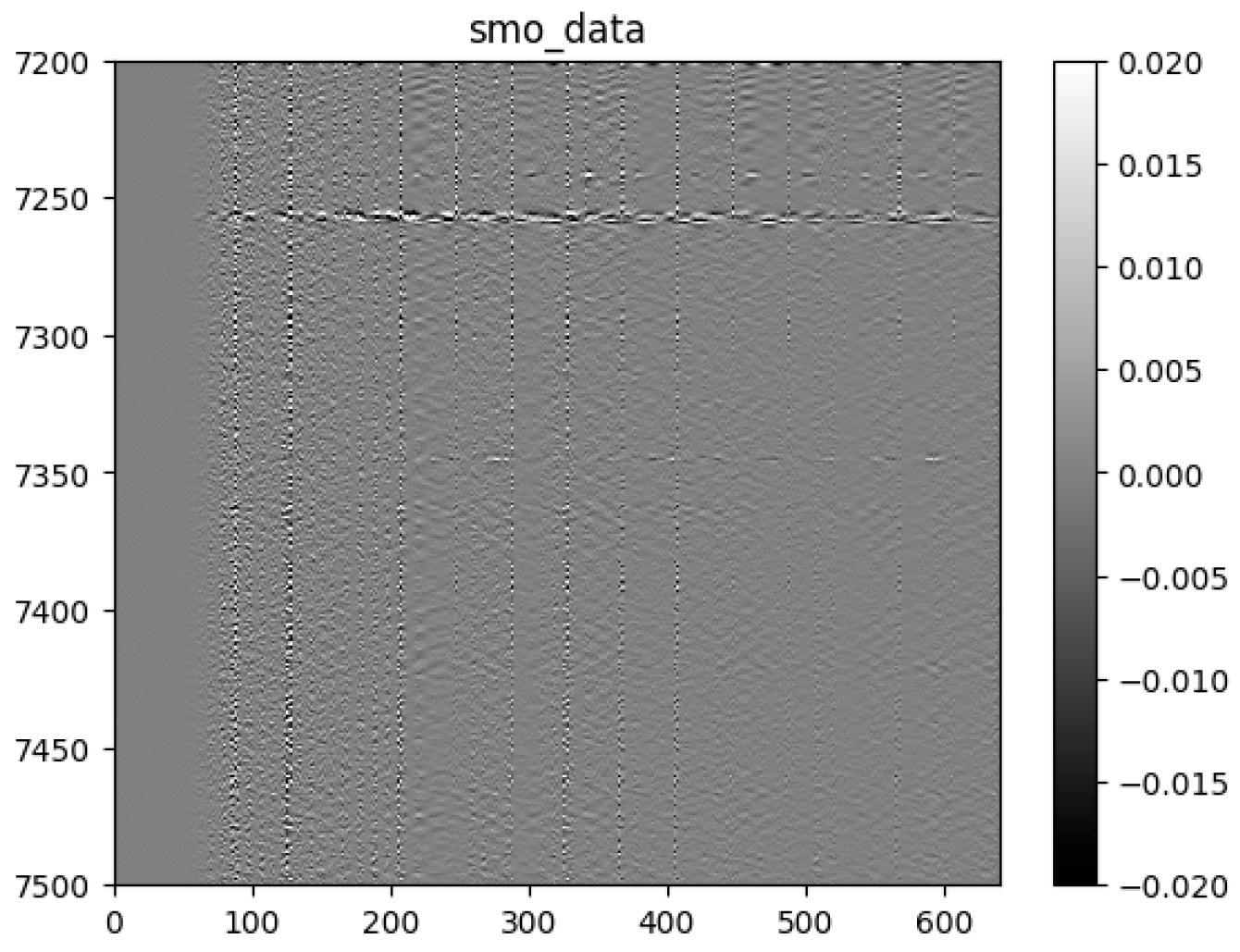
3.2.1. Denoising
3.2.2. Rationale
3.2.3. Baseline Drift
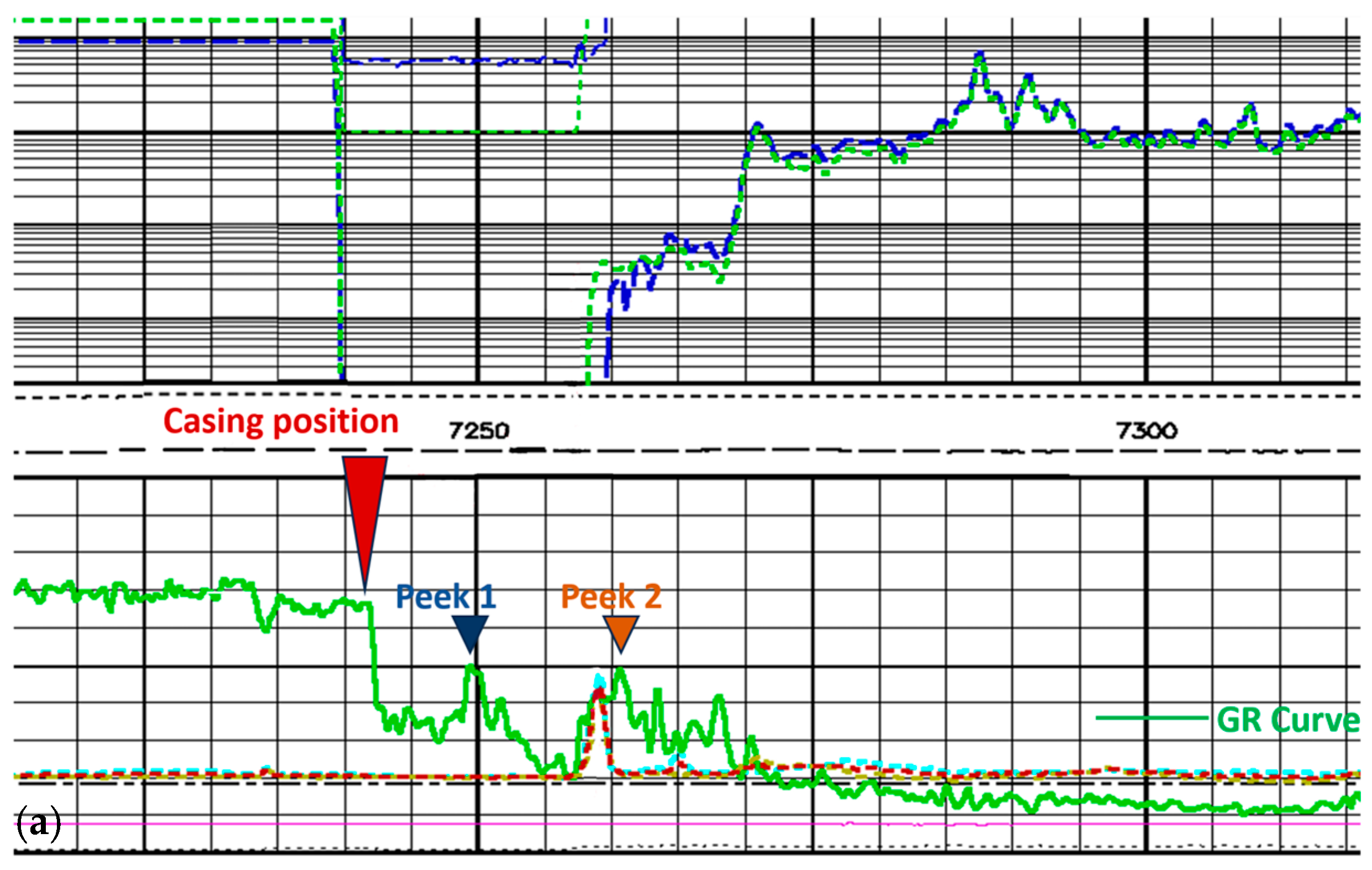
4. Verification of Experimental Results
4.1. Data Validation
4.2. System Performance Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, Y.; Su, Y.; Hou, X.; Hong, M.H. Directional sliding of water: Biomimetic snake scale surfaces. Opto-Electron. Adv. 2021, 4, 210008. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, C.; Qing, A.; Luo, X. A frequency and pattern reconfigurable antenna array based on liquid crystal technology. IEEE Photonics J. 2017, 9, 4600307. [Google Scholar] [CrossRef]
- Zhao, Y.; Qing, A.; Meng, Y.; Song, Z.; Lin, C. Dual-band circular polarizer based on simultaneous anisotropy and chirality in planar metamaterial. Sci. Rep. 2018, 8, 1729. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Huang, C.; Song, Z.; Liang, S.; Luo, X.; Qing, A. A digital metamaterial of arbitrary base based on voltage tunable liquid crystal. IEEE Access 2019, 7, 79671–79676. [Google Scholar] [CrossRef]
- Li, N.; Liu, P.; Wu, H.; Li, Y.; Zhang, W.; Weng, K.; Feng, Z.; Wang, H. Development and Prospect of Interpretation Methods of Far Detection Acoustic Logging Processing. Pet. Explor. Dev. 2024, 51, 731–742. [Google Scholar] [CrossRef]
- Heping, P.A.N.; Huolin, M.A.; Bolin, C.A.I.; Niu, Y. Geophysical Logging and Borehole Geophysical Exploration; Science Press: Beijing, China, 2009. (In Chinese) [Google Scholar]
- Chen, L.; Zou, C.; Wang, Z.; Liu, H.; Yao, S.; Chen, D. Logging evaluation method of low resistivity reservoir-A case study of well block DX12 in Junggar basin. J. Earth Sci. 2009, 20, 1003–1011. [Google Scholar] [CrossRef]
- Loperte, A.; Bavusi, M.; Cerverizzo, G.; Lapenna, V.; Soldovieri, F. Ground penetrating radar in dam monitoring: The test case of Acerenza (Southern Italy). Int. J. Geophys. 2011, 2011, 654194. [Google Scholar] [CrossRef]
- Neal, A. Ground-penetrating radar and its use in sedimentology: Principles, problems and progress. Earth-Sci. Rev. 2004, 66, 261–330. [Google Scholar] [CrossRef]
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; The Institution of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Liu, S.; Wu, J.; Dong, H. The experimental results and analysis of a borehole radar prototype. J. Geophys. Eng. 2012, 9, 201–209. [Google Scholar] [CrossRef]
- Jack, R.; Jackson, P. Imaging attributes of railway track formation and ballast using ground probing radar. NDT E Int. 1999, 32, 457–462. [Google Scholar] [CrossRef]
- Wänstedt, S.; Carlsten, S.; Tirén, S. Borehole radar measurements aid structure geological interpretations. J. Appl. Geophys. 2000, 43, 227–237. [Google Scholar] [CrossRef]
- Seren, H.R.; Buzi, E.; Al-Maghrabi, L.; Ham, G.; Bernero, G.; Deffenbaugh, M. An untethered sensor platform for logging vertical wells. IEEE Trans. Instrum. Meas. 2018, 67, 798803. [Google Scholar] [CrossRef]
- Ellis, D.V.; Singer, J.M. Well Logging for Earth Scientists, 2nd ed.; Springer: Dordrecht, The Netherlands, 2007; p. 15. [Google Scholar]
- Segesman, F.; Soloway, S.; Watson, M. Well logging The explo ration of subsurface geology. Proc. IRE 1962, 50, 22272243. [Google Scholar] [CrossRef]
- Ambrus, D.; Bilas, V.; Vasic, D. A digital tachometer for high temperature telemetry utilizing thermally uprated commercial electronic components. IEEE Trans. Instrum. Meas. 2005, 54, 13611365. [Google Scholar] [CrossRef]
- Sato, M.; Thierbach, R. Analysis of a borehole radar in cross-hole model. IEEE Trans. Geosci. Remote Sens. 1991, 29, 899–904. [Google Scholar] [CrossRef]
- Chunyan, Z. Research on Bipolar Gaussian Pulse Signal Source with Langmuir Triple Probe; University of Electronic Science and Technology: Chengdu, China, 2013. [Google Scholar]
- Xu, W.Q. Design of Ultra-Wideband High-Power Signal Source for Ground-Penetrating Radar; University of Electronic Science and Technology: Chengdu, China, 2019. [Google Scholar]
- Krishnaswamy, P.; Kuthi, A.; Vernier, P.; Gundersen, M. Compact subnanosecond pulse generator using avalanche transistors for cell electroperturbation studies. IEEE Trans. Dielectr. Electr. Insul. 2007, 14, 873877. [Google Scholar] [CrossRef]
- Ito, K.A. Trace-Back method with source states for Viterbi decoding of rate-1/n convolutional codes. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2012, 4, 767–775. [Google Scholar] [CrossRef]
- Zhou, L.; Geller, B.; Wei, A.; Zheng, B.; Cui, J.; Xu, S. Cross-Layer Rate Allocation for Multimedia Applications In Pervasive Computing Environment. In Proceedings of the IEEE GLOBECOM 2008—2008 IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; IEEE: New York, NY, USA, 2008; pp. 1–5. [Google Scholar]
- Zhao, H.; Song, K.; Li, K.; Wu, C.; Chen, Z. A high-speed well logging telemetry system based on low-power FPGA. IEEE Access 2021, 9, 8178–8191. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth | Pulse Height (ns) | Center | Depth Resolution |
|---|---|---|---|
| 0–0.25 | 0.50 | 2000 | 0.025 |
| 0.25–0.5 | 1.00 | 1000 | 0.05 |
| 0.5–1.0 | 2.00 | 500 | 0.1 |
| 1.0–2.0 | 4.00 | 250 | 0.2 |
| 2.0–4.0 | 8.00 | 125 | 0.4 |
| 4.0–8.0 | 16.00 | 63 | 0.8 |
| Characteristic Point | Third-Party Data (m) | Measured Data (m) | Length After Radar | Error |
|---|---|---|---|---|
| 0–0.25 | 7240 | 7257 | 7241 | 0.013% |
| 0.25–0.5 | 7250 | 7265 | 7249 | 0.013% |
| 0.5–1.0 | 7261 | 7285 | 7259 | 0.025% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Wang, K.; Liu, Y.; Guo, C.; Zhao, Q. Borehole Radar Experiment in a 7500 m Deep Well. Sensors 2025, 25, 2991. https://doi.org/10.3390/s25102991
Yang H, Wang K, Liu Y, Guo C, Zhao Q. Borehole Radar Experiment in a 7500 m Deep Well. Sensors. 2025; 25(10):2991. https://doi.org/10.3390/s25102991
Chicago/Turabian StyleYang, Huanyu, Kaihua Wang, Yajie Liu, Cheng Guo, and Qing Zhao. 2025. "Borehole Radar Experiment in a 7500 m Deep Well" Sensors 25, no. 10: 2991. https://doi.org/10.3390/s25102991
APA StyleYang, H., Wang, K., Liu, Y., Guo, C., & Zhao, Q. (2025). Borehole Radar Experiment in a 7500 m Deep Well. Sensors, 25(10), 2991. https://doi.org/10.3390/s25102991