
Validity Verification of Human Pose-Tracking Algorithms for Gait Analysis Capability

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
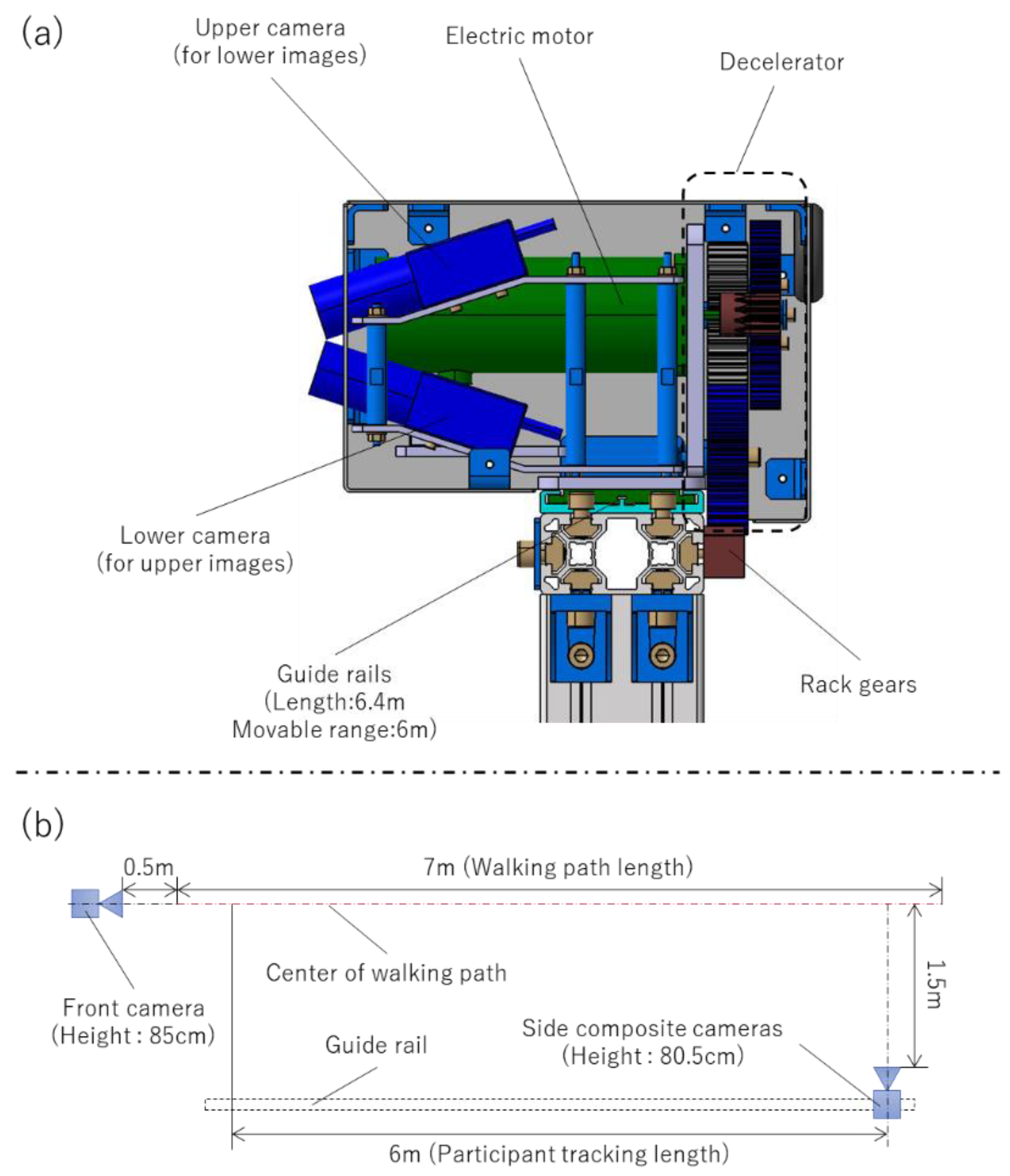
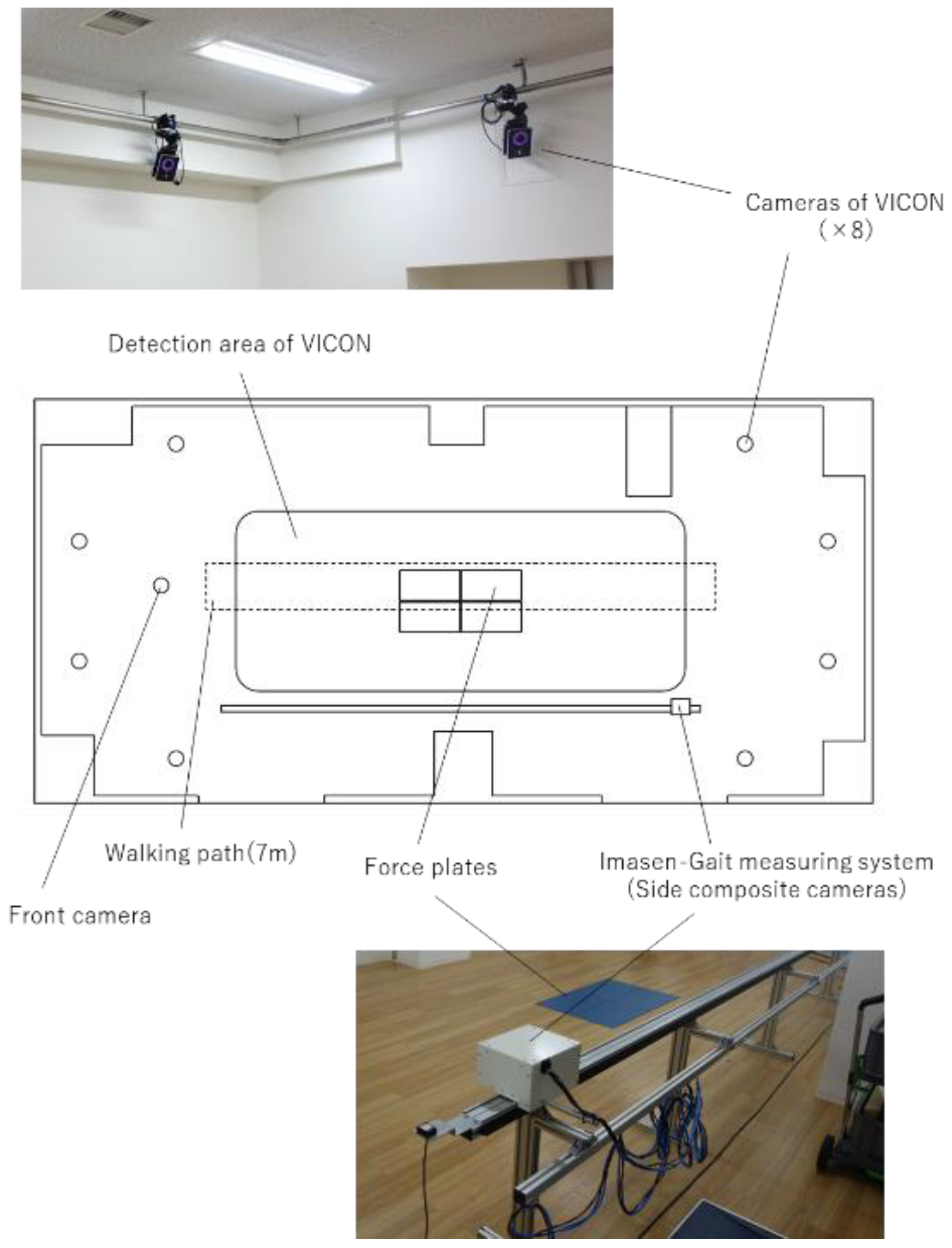
2.2. Motion Task
2.3. Data Collection and Processing
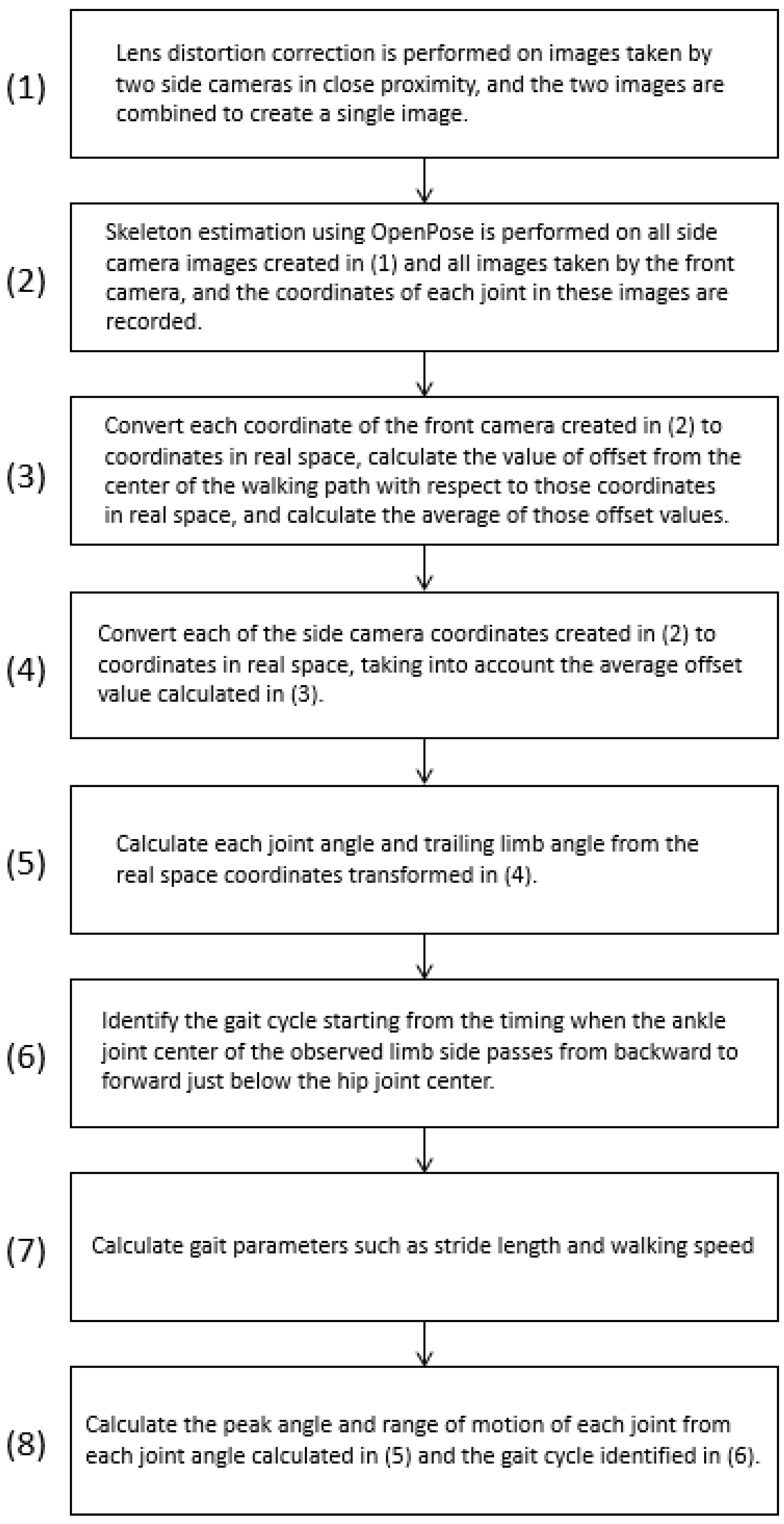
2.4. Data Analysis
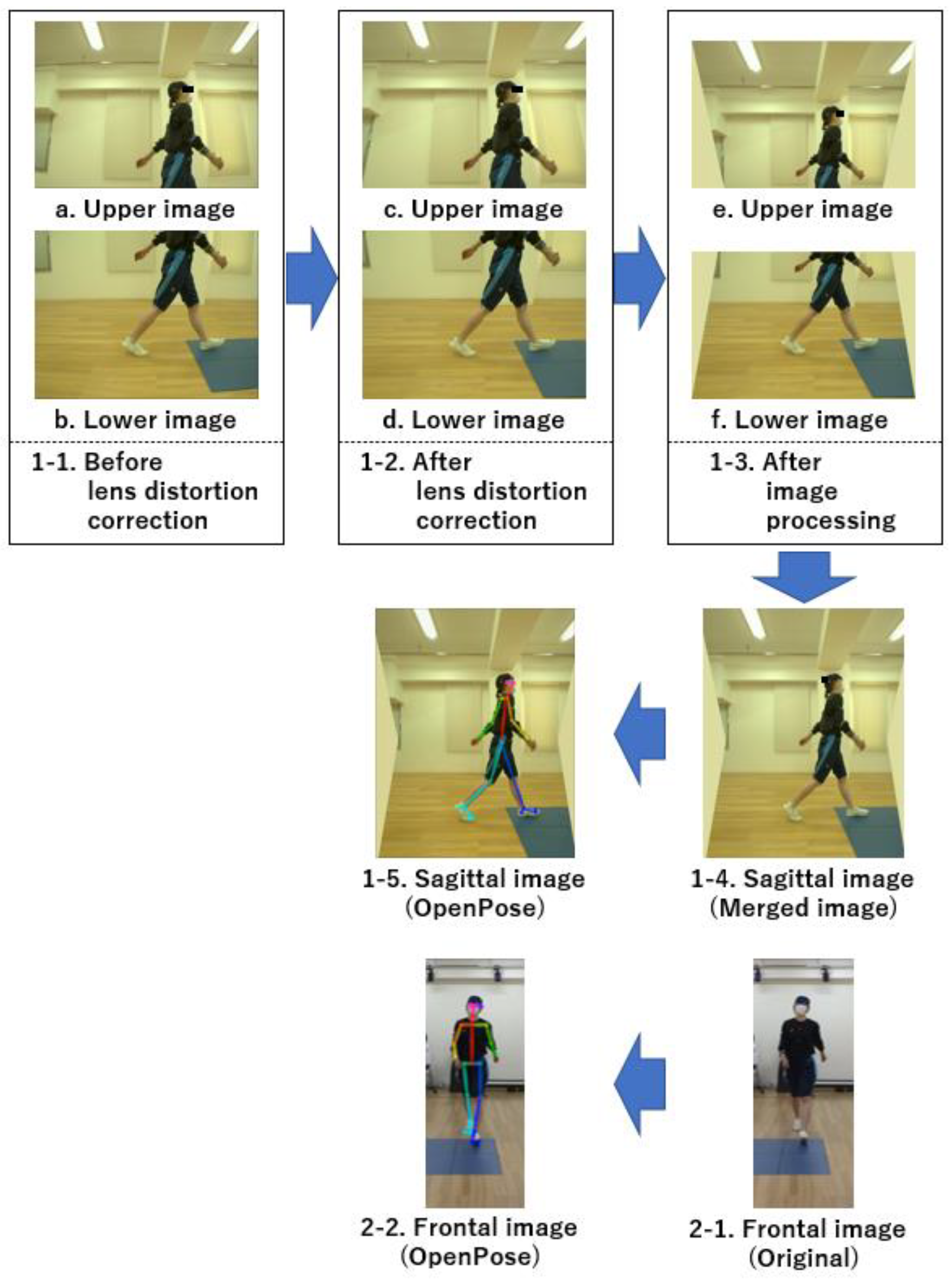
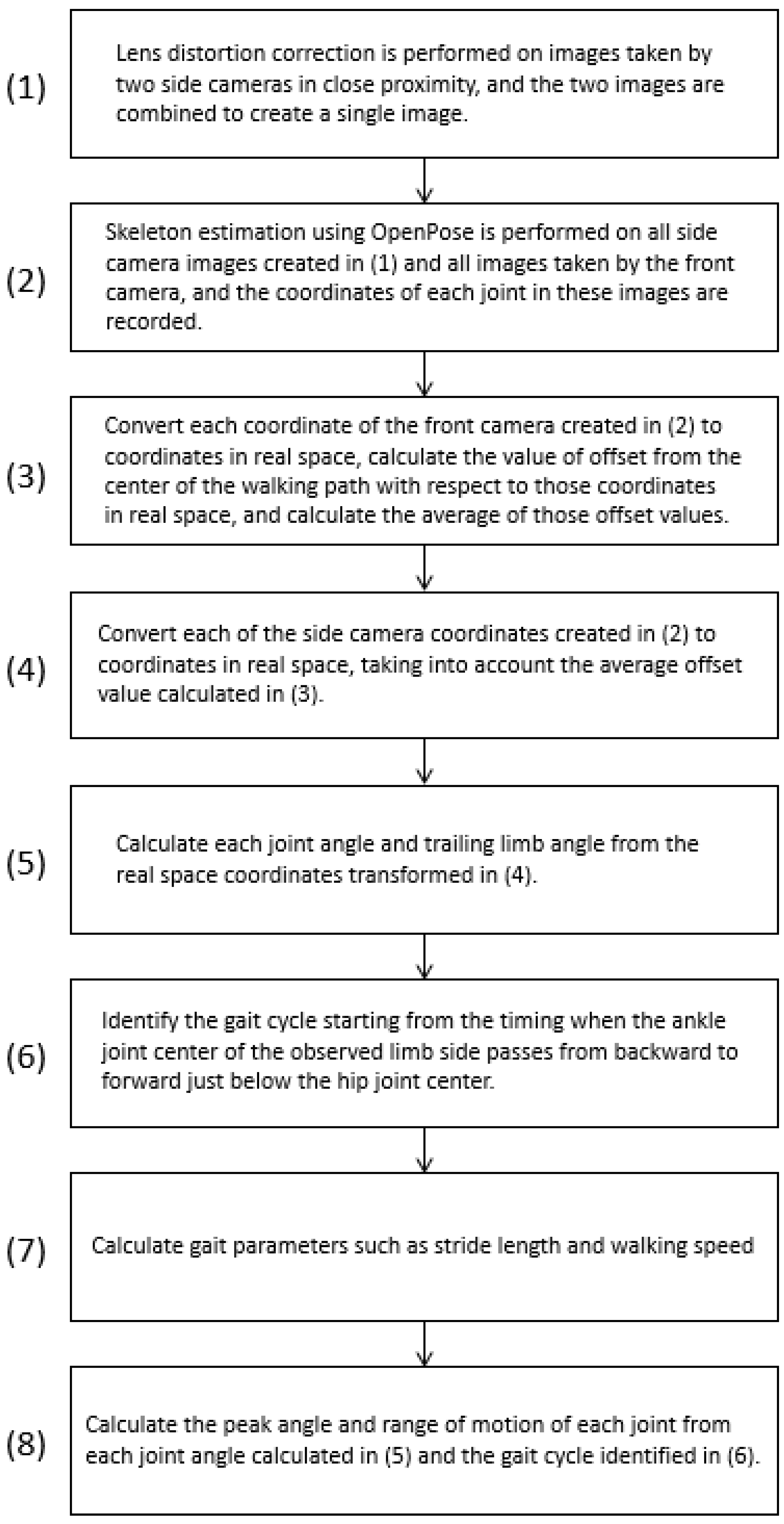
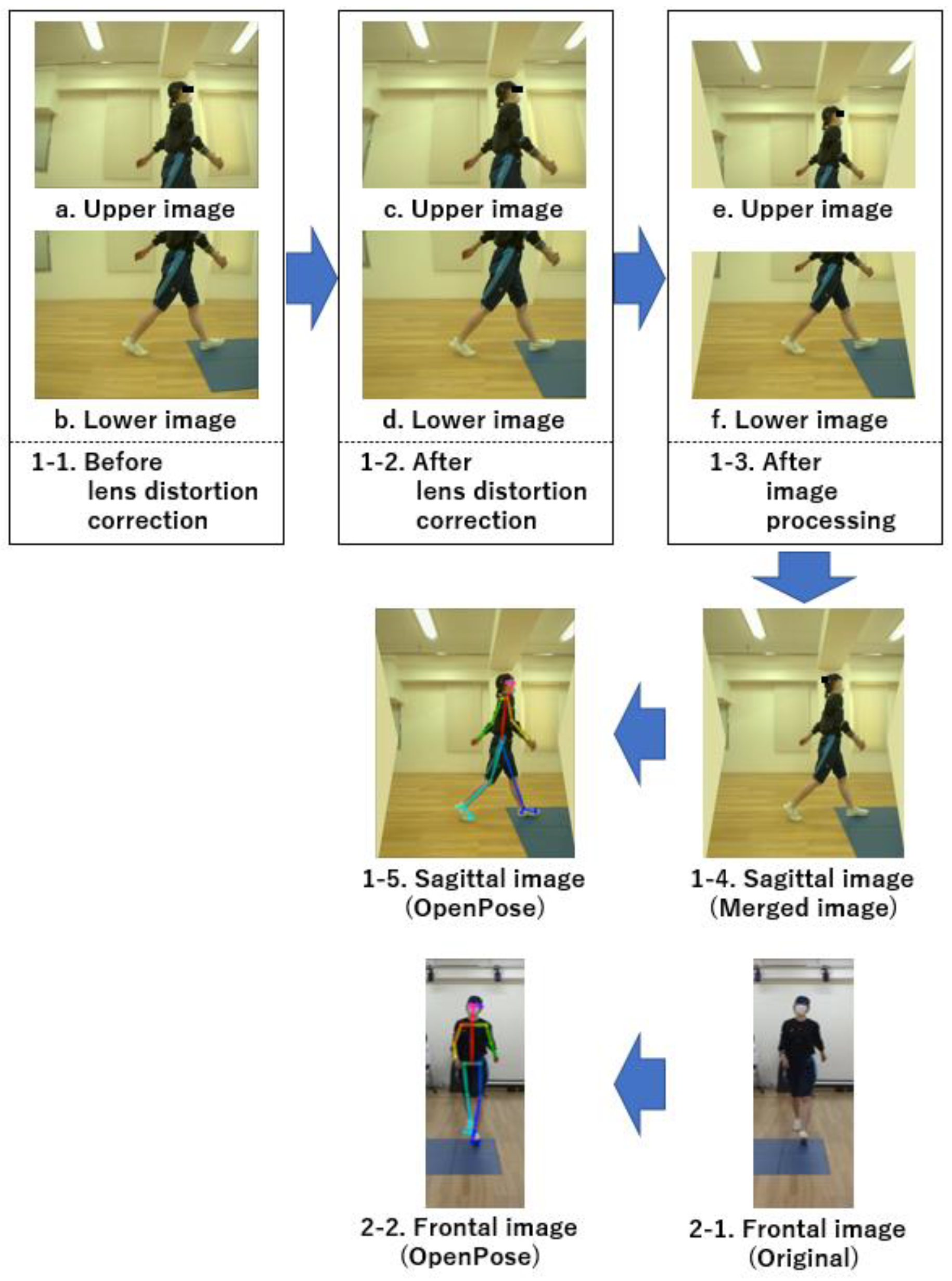
- Lens distortion in images captured by the side camera (sagittal plane) was corrected, and images from the two cameras were combined.
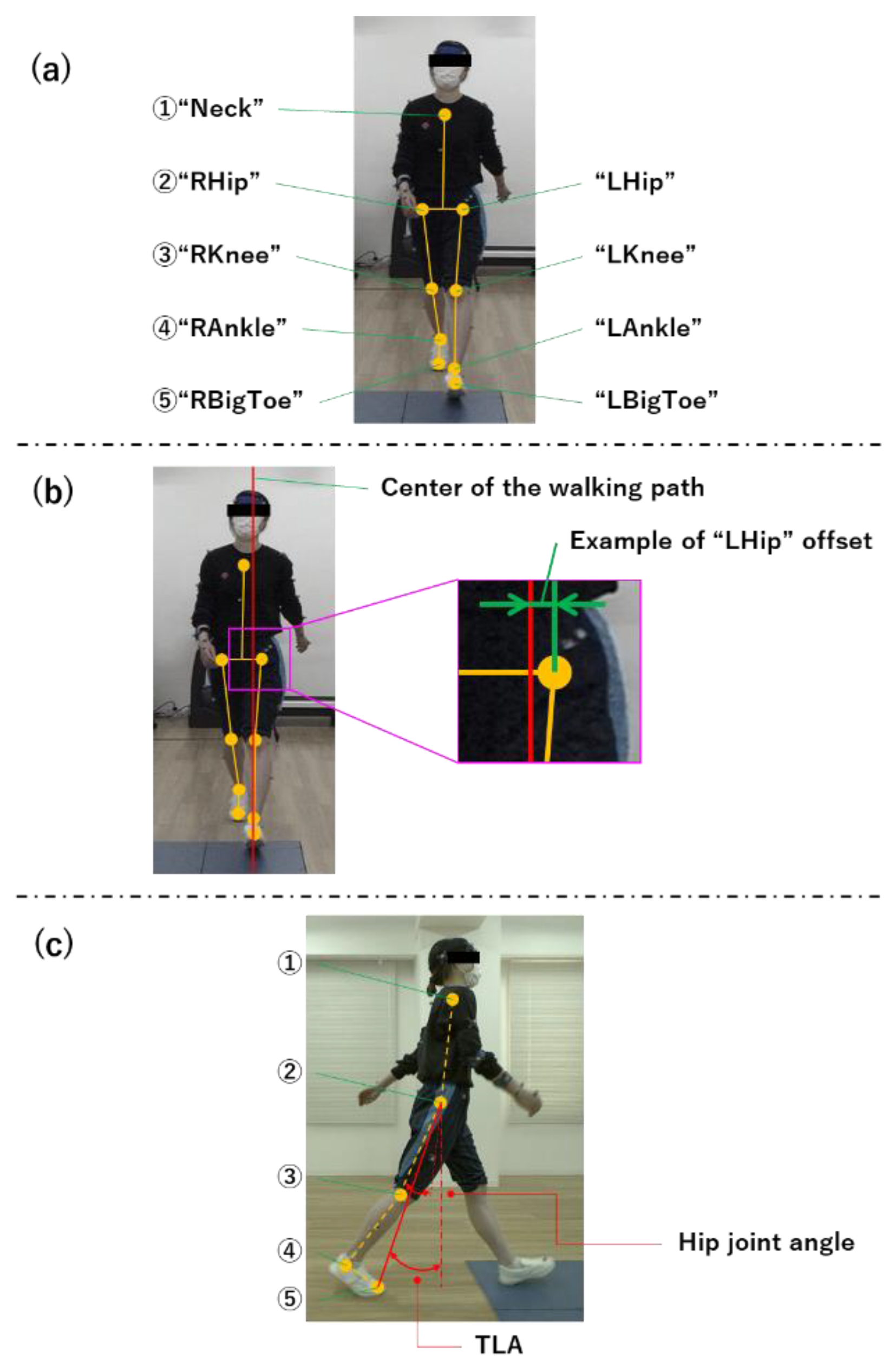
- Skeletal estimation using OpenPose was performed on images from both the side and front cameras, recording the coordinates of each joint node.
- Joint node coordinate information in each frame of the front camera was converted to real space coordinates, considering height information and joint node coordinates.
- Joint node coordinate information in each frame of the side camera was converted to real space coordinates, accounting for the distance between the side camera and the walking path center plane.
- Each joint angle and TLA for each frame was calculated, considering the angles between specific joint nodes in the sagittal plane.
- The gait cycle was identified based on the timing of the ankle joint center passing directly under the hip joint center.
- Each gait parameter, including stride time, stride length, and gait speed, was calculated.
- Peak angles and ROMs for each joint during the identified gait cycle were calculated.
2.5. Statistical Analysis
3. Results
3.1. Data Acquisition Rate
3.2. Test–Retest and Intra-Rater Reliability Analysis
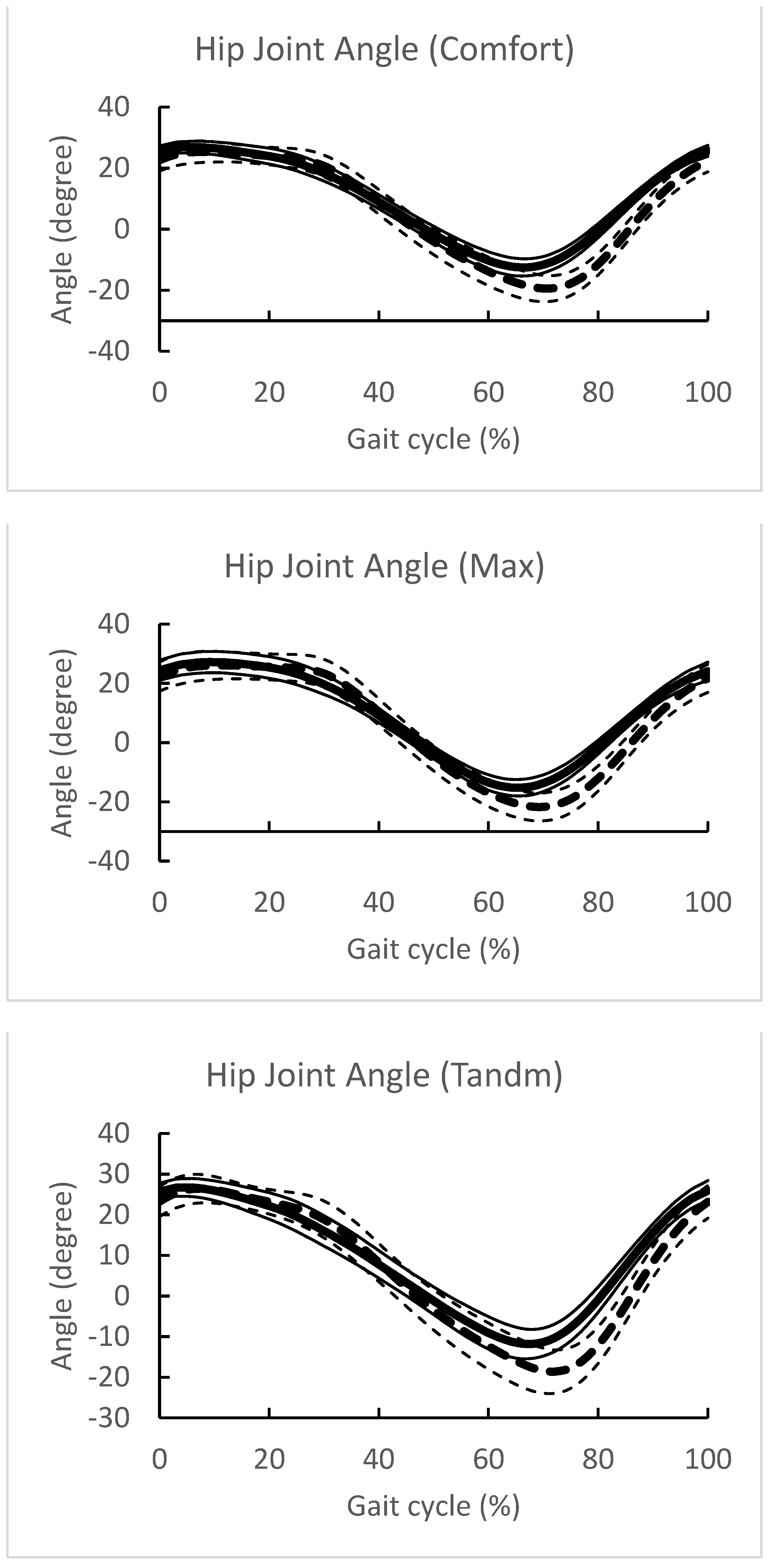
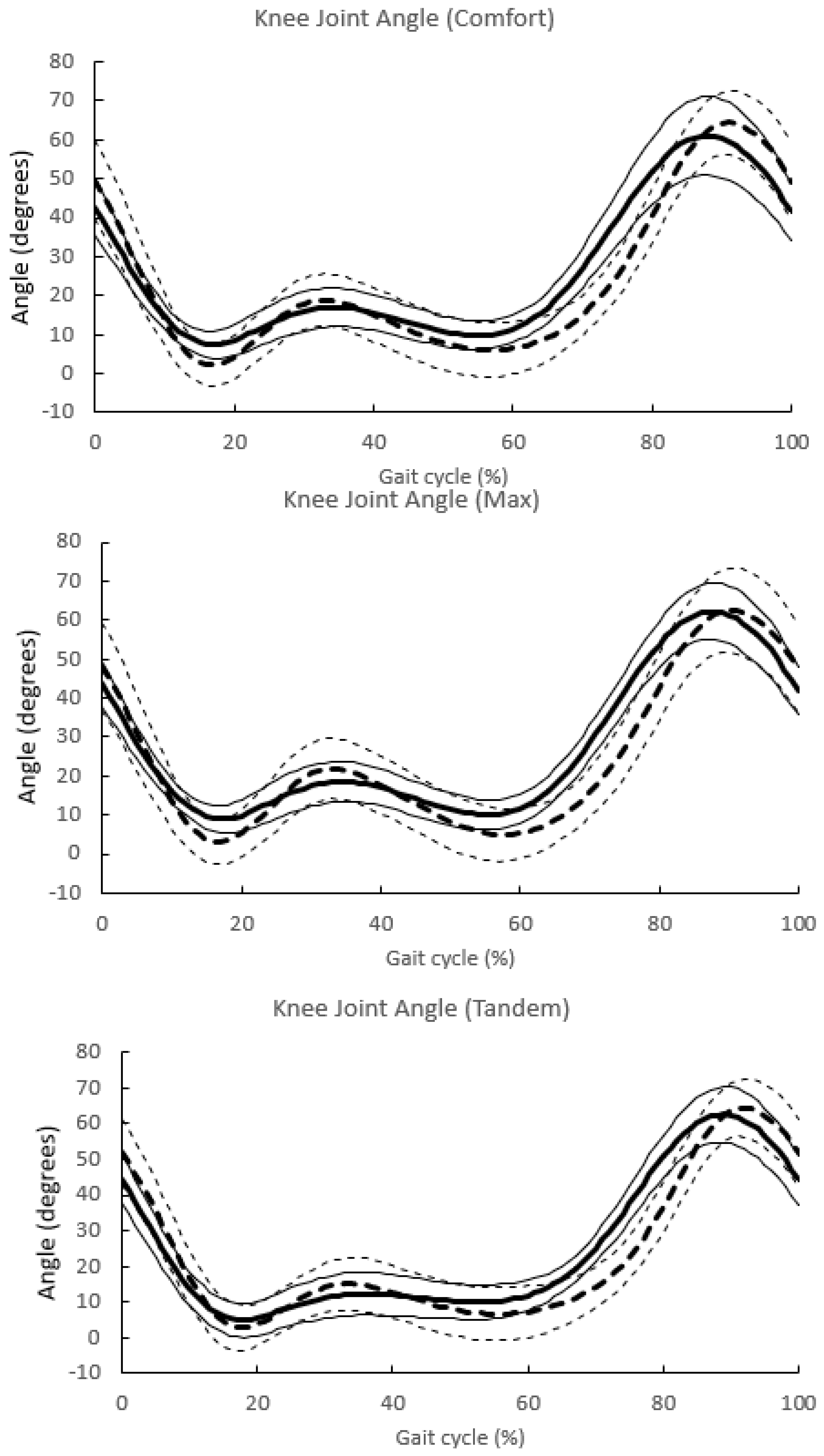
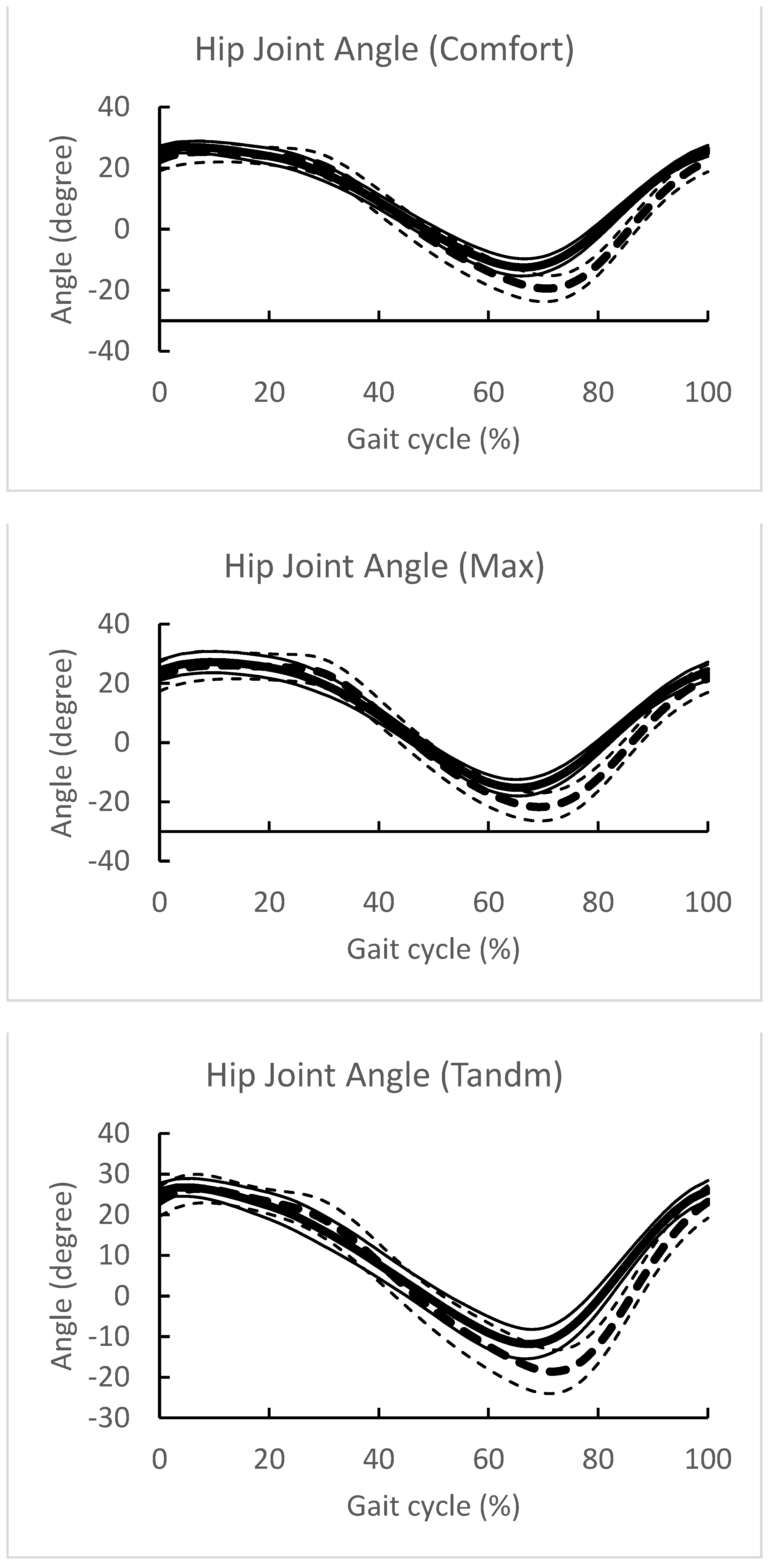
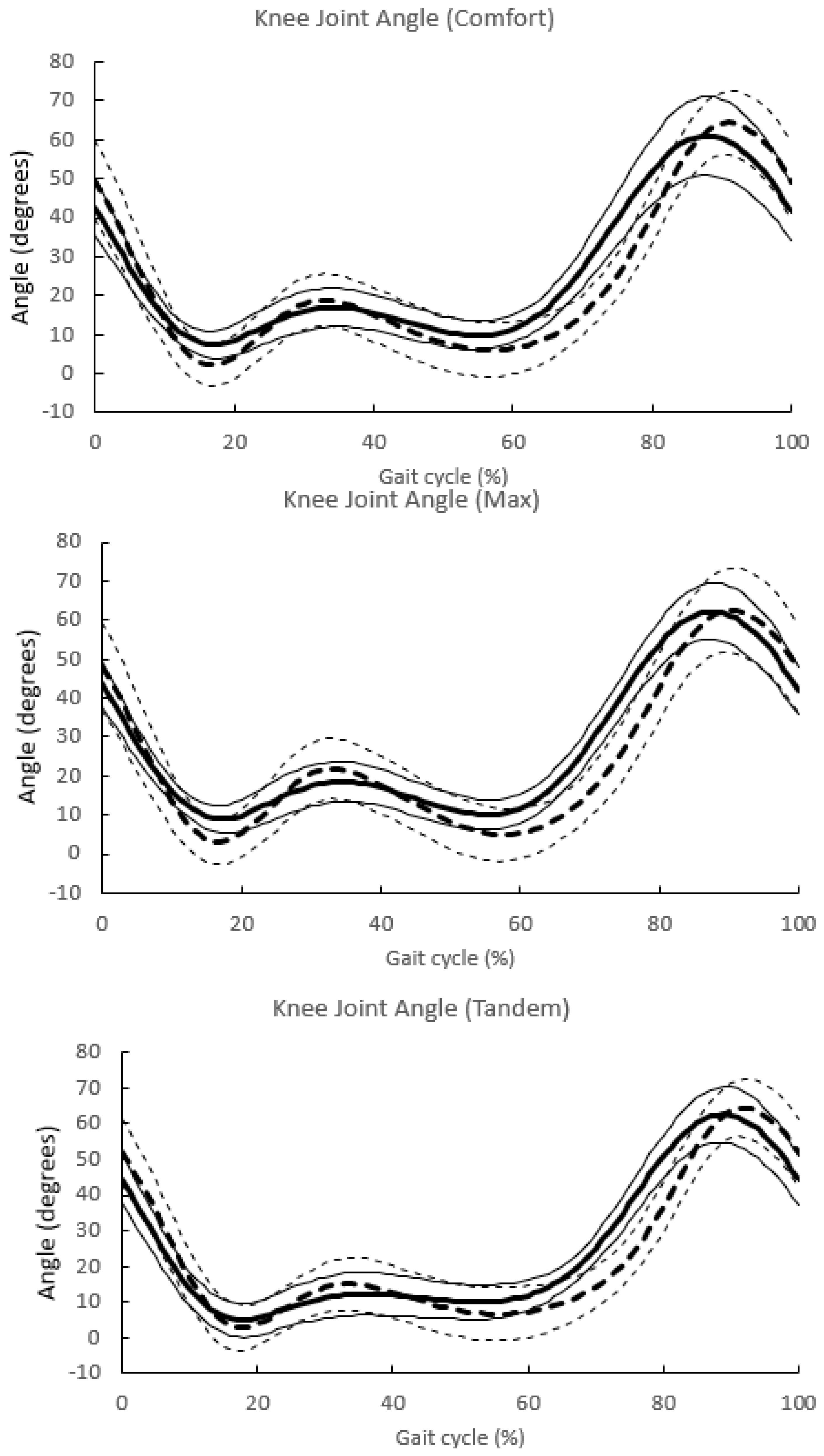
- The changes in joint angles for each of the three gait patterns are summarized.
- The identification of one gait cycle was normalized, so that 0 was the time when the central axis of the hip joint crossed over the central axis of the ankle joint, and 100% of one gait cycle was identified.
- The solid line indicates the mean value for all subjects in the Imasen gait system, and the dashed line indicates the mean value for all subjects in the VICON system. The SD of the SD is also described.
3.3. Criterion Validity
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ota, M.; Tateuchi, H.; Hashiguchi, T.; Kato, T.; Ogino, Y.; Yamagata, M.; Ichihashi, N. Verification of reliability and validity of motion analysis systems during bilateral squat using human pose tracking algorithm. Gait Posture 2020, 80, 62–67. [Google Scholar] [CrossRef] [PubMed]
- Brodie, M.A.; Coppens, M.J.; Ejupi, A.; Gschwind, Y.J.; Annegarn, J.; Schoene, D.; Wieching, R.; Lord, S.R.; Delbaere, K. Comparison between clinical gait and daily-life gait assessments of fall risk in older people. Geriatr. Gerontol. Int. 2017, 17, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 2nd ed.; John Wiley &Sons. Inc.: New York, NY, USA, 1990; ISBN 978-0-4703-9818-0. [Google Scholar]
- Cappozzo, A.; Della Croce, U.; Leardini, A.; Chiari, L. Human movement analysis using stereophotogrammetry. Part 1: Theoretical background. Gait Posture 2005, 21, 186–196. [Google Scholar] [CrossRef] [PubMed]
- Ota, M.; Tateuchi, H.; Hashiguchi, T.; Ichihashi, N. Verification of validity of gait analysis systems during treadmill walking and running using human pose tracking algorithm. Gait Posture 2021, 85, 290–297. [Google Scholar] [CrossRef] [PubMed]
- Pfister, A.; West, A.M.; Bronner, S.; Noah, J.A. Comparative abilities of Microsoft Kinect and Vicon 3D motion capture for gait analysis. J. Med. Eng. Technol. 2014, 38, 274–280. [Google Scholar] [CrossRef] [PubMed]
- Asogwa, C.O.; Nagano, H.; Wang, K.; Begg, R. Using deep learning to predict minimum foot-ground clearance event from toe-off kinematics. Sensors 2022, 22, 6960. [Google Scholar] [CrossRef] [PubMed]
- Vishnoi, N.; Duric, Z.; Gerber, N.L. Markerless identification of key events in gait cycle using image flow. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 4839–4842. [Google Scholar] [CrossRef]
- Mentiplay, B.F.; Perraton, L.G.; Bower, K.J.; Pua, Y.H.; McGaw, R.; Heywood, S.; Clark, R.A. Gait assessment using the Microsoft Xbox One Kinect: Concurrent validity and inter-day reliability of spatiotemporal and kinematic variables. J. Biomech. 2015, 48, 2166–2170. [Google Scholar] [CrossRef] [PubMed]
- Cao, Z.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime multi-person 2D pose estimation using part affinity fields. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 172–186. [Google Scholar] [CrossRef] [PubMed]
- Zago, M.; Luzzago, M.; Marangoni, T.; De Cecco, M.; Tarabini, M.; Galli, M. 3D tracking of human motion using visual skeletonization and stereoscopic vision. Front. Bioeng. Biotechnol. 2020, 8, 181. [Google Scholar] [CrossRef] [PubMed]
- Nakano, N.; Sakura, T.; Ueda, K.; Omura, L.; Kimura, A.; Iino, Y.; Fukashiro, S.; Yoshioka, S. Evaluation of 3D markerless motion capture accuracy using OpenPose with multiple video cameras. Front. Sports Act. Living 2020, 2, 50. [Google Scholar] [CrossRef] [PubMed]
- Clark, R.A.; Bower, K.J.; Mentiplay, B.F.; Paterson, K.; Pua, Y.H. Concurrent validity of the Microsoft Kinect for assessment of spatiotemporal gait variables. J. Biomech. 2013, 46, 2722–2725. [Google Scholar] [CrossRef] [PubMed]
- Koo, T.K.; Li, M.Y. A guideline of selecting and reporting intraclass correlation coefficients for reliability research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef] [PubMed]
- Cohen, J. Statistical Power Analysis for the Behavioral Science, 2nd ed.; Phycology Press: New York, NY, USA, 1988. [Google Scholar]
- Meldrum, D.; Shouldice, C.; Conroy, R.; Jones, K.; Forward, M. Test–retest reliability of three dimensional gait analysis: Including a novel approach to visualising agreement of gait cycle waveforms with Bland and Altman plots. Gait Posture 2014, 39, 265–271. [Google Scholar] [CrossRef] [PubMed]
- Fernandes, R.; Armada-da-Silva, P.; Pool-Goudzwaard, A.L.; Moniz-Pereira, V.; Veloso, A.P. Three dimensional multi-segmental trunk kinematics and kinetics during gait: Test–retest reliability and minimal detectable change. Gait Posture 2016, 46, 18–25. [Google Scholar] [CrossRef] [PubMed]
- Ino, T.; Samukawa, M.; Ishida, T.; Wada, N.; Koshino, Y.; Kasahara, S.; Tohyama, H. Validity of AI-based gait analysis for simultaneous measurement of bilateral lower limb kinematics using a single video camera. Sensors 2023, 23, 9799. [Google Scholar] [CrossRef] [PubMed]
- Ramesh, S.H.; Lemaire, E.D.; Tu, A.; Cheung, K.; Baddour, N. Automated implementation of the Edinburgh Visual Gait Score (EVGS) using OpenPose and handheld smartphone video. Sensors 2023, 23, 4839. [Google Scholar] [CrossRef] [PubMed]
- He, Q.; Chen, H.; Mo, X. Practical application of interactive AI technology based on visual analysis in professional system of physical education in universities. Heliyon 2024, 10, e24627. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement | Mean Data (L) | Mean Data (R) | Mean Data (LR) | Test–Retest ICC (1,k) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Vicon | Imasen | Diff | Vicon | Imasen | Diff | Vicon | Imasen | Diff | Vicon | Imasen | ||||||||||
| Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | L | R | L | R | |||||
| Step length (mm) | com | 699.6 | 48.7 | 685.4 | 47.2 | −14.2 | 696.2 | 49.4 | 682.2 | 48.3 | −13.9 | 697.9 | 48.4 | 683.8 | 47.1 | −14.1 | 0.736 | 0.906 | 0.830 | 0.769 |
| max | 790.5 | 55.7 | 780.8 | 63.6 | −9.6 | 799 | 51.6 | 787.7 | 50.1 | −11.2 | 794.6 | 53.2 | 784.2 | 56.7 | −10.4 | 0.992 | 0.980 | 0.983 | 0.968 | |
| tandem | 663.9 | 77 | 658.1 | 78.1 | −5.8 | 663.1 | 71.3 | 663.3 | 69.5 | 0.2 | 663.5 | 73.2 | 660.7 | 73 | −2.8 | 0.982 | 0.932 | 0.975 | 0.959 | |
| Gait speed (m/s) | com | 1.38 | 0.12 | 1.36 | 0.11 | −0.02 | 1.38 | 0.12 | 1.37 | 0.11 | −0.02 | 1.38 | 0.12 | 1.37 | 0.11 | −0.02 | 0.982 | 0.948 | 0.977 | 0.931 |
| max | 1.85 | 0.18 | 1.82 | 0.17 | −0.03 | 1.86 | 0.17 | 1.82 | 0.13 | −0.04 | 1.86 | 0.17 | 1.82 | 0.15 | −0.04 | 0.990 | 0.992 | 0.988 | 0.965 | |
| tandem | 1.23 | 0.23 | 1.24 | 0.24 | 0.01 | 1.25 | 0.23 | 1.24 | 0.21 | 0 | 1.24 | 0.23 | 1.24 | 0.22 | 0.01 | 0.977 | 0.987 | 0.951 | 0.987 | |
| Stride time (s) | com | 1.009 | 0.046 | 1.013 | 0.036 | 0.005 | 1.023 | 0.045 | 1.021 | 0.038 | −0.002 | 1.016 | 0.046 | 1.017 | 0.037 | 0.001 | 0.921 | 0.947 | 0.927 | 0.955 |
| max | 0.858 | 0.068 | 0.869 | 0.064 | 0.011 | 0.874 | 0.063 | 0.878 | 0.059 | 0.004 | 0.866 | 0.065 | 0.873 | 0.061 | 0.008 | 0.965 | 0.982 | 0.947 | 0.959 | |
| tandem | 1.092 | 0.142 | 1.099 | 0.166 | 0.007 | 1.086 | 0.124 | 1.091 | 0.125 | 0.004 | 1.089 | 0.131 | 1.095 | 0.145 | 0.005 | 0.979 | 0.975 | 0.981 | 0.985 | |
| Stride length (mm) | com | 1385.5 | 96.6 | 1377.1 | 92.6 | −8.4 | 1413 | 92.5 | 1393.2 | 92.4 | −19.7 | 1399.2 | 94.4 | 1385.2 | 91.7 | −14 | 0.949 | 0.922 | 0.949 | 0.911 |
| max | 1580 | 94.3 | 1571.2 | 119.3 | −8.7 | 1615.3 | 109.8 | 1589 | 89.2 | −26.3 | 1597.1 | 102.3 | 1579.9 | 104.6 | −17.3 | 0.992 | 0.983 | 0.990 | 0.978 | |
| tandem | 1313.9 | 141.5 | 1328.7 | 146.1 | 14.8 | 1327.9 | 155.5 | 1332.3 | 136.1 | 4.4 | 1320.9 | 146.8 | 1330.5 | 139.3 | 9.6 | 0.969 | 0.741 | 0.967 | 0.958 | |
| Item | Test–Retest ICC (1,k) | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Vicon | Imasen | Diff | Vicon | Imasen | Diff | Vicon | Imasen | Diff | Vicon | Imasen | |||||||||||
| Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | L | R | L | R | ||||||
| TLA | Angle (°) | com | 23.6 | 2.6 | 22.1 | 2.4 | −1.5 | 23.6 | 2.5 | 23.2 | 2.1 | −0.3 | 23.6 | 2.5 | 22.7 | 2.3 | −0.9 | 0.978 | 0.931 | 0.974 | 0.815 |
| max | 27.2 | 2.5 | 25.6 | 2.1 | −1.6 | 26.9 | 2.8 | 25.9 | 2.2 | −0.9 | 27 | 2.6 | 25.8 | 2.1 | −1.3 | 0.991 | 0.975 | 0.983 | 0.973 | ||
| tandem | 22.1 | 3.2 | 20.8 | 2.7 | −1.3 | 22.1 | 3.3 | 21.1 | 3.1 | −1 | 22.1 | 3.2 | 21 | 2.9 | −1.2 | 0.800 | 0.985 | 0.844 | 0.976 | ||
| Hip joint | Flexion angle (°) | com | 31 | 6.1 | 27.5 | 1.9 | −3.5 | 32.5 | 6.1 | 32.2 | 3 | −0.3 | 31.7 | 6.1 | 29.8 | 3.5 | −1.9 | 0.996 | 0.991 | 0.954 | 0.943 |
| max | 33.9 | 6.4 | 28.6 | 2.5 | −5.4 | 34.7 | 6.1 | 34.6 | 2.7 | −0.1 | 34.3 | 6.2 | 31.5 | 4 | −2.8 | 0.993 | 0.997 | 0.991 | 0.941 | ||
| tandem | 31.6 | 6.2 | 27.1 | 2.6 | −4.5 | 33.2 | 5.7 | 32.4 | 3.8 | −0.8 | 32.4 | 5.9 | 29.8 | 4.2 | −2.7 | 0.961 | 0.985 | 0.980 | 0.915 | ||
| Flexion phase (%) | com | 13 | 5.6 | 6.4 | 3.8 | −6.6 | 12 | 4.7 | 6 | 2.9 | −6 | 12.5 | 5.2 | 6.2 | 3.3 | −6.3 | 0.941 | 0.963 | 0.647 | 0.885 | |
| max | 14.3 | 6.1 | 9.3 | 4 | −5 | 14.7 | 6.4 | 9.3 | 3.3 | −5.4 | 14.5 | 6.2 | 9.3 | 3.7 | −5.2 | 0.979 | 0.918 | 0.965 | 0.829 | ||
| tandem | 10.4 | 5.3 | 5 | 4 | −5.4 | 10.9 | 4.8 | 4.8 | 2.3 | −6.1 | 10.7 | 5 | 4.9 | 3.2 | −5.8 | 0.994 | 0.941 | 0.884 | 0.880 | ||
| Extension angle (%) | com | −14.1 | 6.7 | −12.4 | 3.1 | 1.7 | −13.3 | 5.8 | −15.3 | 2.7 | −2 | −13.7 | 6.2 | −13.8 | 3.2 | −0.1 | 0.996 | 0.791 | 0.983 | 0.741 | |
| max | −16.1 | 6.9 | −15.7 | 2.7 | 0.3 | −16.6 | 6.8 | −14.9 | 3.9 | 1.7 | −16.3 | 6.8 | −15.3 | 3.3 | 1 | 0.995 | 0.963 | 0.984 | 0.886 | ||
| tandem | −12.2 | 8.2 | −12.1 | 3.1 | 0 | −12.5 | 6.4 | −13.1 | 4.8 | −0.7 | −12.3 | 7.3 | −12.6 | 4 | −0.3 | 0.886 | 0.992 | 0.846 | 0.980 | ||
| Extension phase (%) | com | 70.8 | 1.8 | 66.4 | 1.6 | −4.5 | 71.1 | 1.4 | 67.1 | 1.5 | −4 | 70.9 | 1.6 | 66.7 | 1.6 | −4.2 | 0.962 | 0.899 | 0.902 | 0.763 | |
| max | 69.5 | 2 | 65.4 | 1.4 | −4.2 | 69.5 | 1.8 | 65.6 | 1 | −3.9 | 69.5 | 1.8 | 65.5 | 1.3 | −4 | 0.933 | 0.899 | 0.754 | 0.839 | ||
| tandem | 71.7 | 2.2 | 67.5 | 2.2 | −4.2 | 71.6 | 2 | 67.5 | 1.8 | −4.1 | 71.7 | 2.1 | 67.5 | 2 | −4.2 | 0.979 | 0.899 | 0.949 | 0.871 | ||
| Knee joint | Flexion angle (°) | com | 65.9 | 8.6 | 65.2 | 2.1 | −0.7 | 65.3 | 11.4 | 65.3 | 4.1 | 0 | 65.6 | 9.9 | 65.3 | 3.2 | −0.3 | 0.992 | 0.899 | 0.927 | 0.970 |
| max | 66.8 | 7.6 | 64.5 | 3.1 | −2.3 | 63.5 | 13 | 69.8 | 5.6 | 6.3 | 65.2 | 10.6 | 67.1 | 5.2 | 1.9 | 0.993 | 0.899 | 0.983 | 0.912 | ||
| tandem | 65.4 | 7.1 | 64.3 | 3.1 | −1.1 | 65.2 | 10.4 | 67.7 | 6.4 | 2.5 | 65.3 | 8.8 | 66 | 5.3 | 0.7 | 0.993 | 0.899 | 0.976 | 0.961 | ||
| Flexion phase (%) | com | 90.7 | 1.3 | 88.3 | 1.1 | −2.5 | 91 | 1.1 | 89.3 | 0.9 | −1.6 | 90.9 | 1.2 | 88.8 | 1.1 | −2.1 | 0.989 | 0.899 | 0.876 | 0.626 | |
| max | 90.2 | 1.3 | 87.6 | 1 | −2.7 | 90.3 | 1.3 | 88.5 | 1.1 | −1.8 | 90.3 | 1.3 | 88 | 1.2 | −2.2 | 0.979 | 0.899 | 0.636 | 0.756 | ||
| tandem | 91.7 | 1.4 | 88.7 | 1.1 | −3 | 92 | 1.1 | 89.6 | 1.3 | −2.4 | 91.8 | 1.2 | 89.1 | 1.3 | −2.7 | 0.954 | 0.899 | 0.813 | 0.554 | ||
| Extension angle (°) | com | 6 | 7 | 9.5 | 3.9 | 3.5 | 6.5 | 7.3 | 7.7 | 4.5 | 1.2 | 6.2 | 7.1 | 8.6 | 4.3 | 2.4 | 0.997 | 0.899 | 0.984 | 0.952 | |
| max | 5.7 | 6.3 | 9.3 | 3.8 | 3.5 | 3.6 | 8.7 | 13.3 | 6.9 | 9.7 | 4.7 | 7.5 | 11.2 | 5.8 | 6.5 | 0.995 | 0.899 | 0.931 | 0.909 | ||
| tandem | 6.4 | 7.6 | 8.7 | 5.5 | 2.3 | 5.6 | 8.5 | 9.3 | 7.8 | 3.6 | 6 | 8 | 9 | 6.6 | 3 | 0.987 | 0.899 | 0.930 | 0.979 | ||
| Extension phase (%) | com | 57 | 2.1 | 54 | 2 | −3 | 57 | 2 | 57.2 | 1.8 | 0.2 | 57 | 2 | 55.6 | 2.5 | −1.4 | 0.914 | 0.899 | 0.885 | 0.927 | |
| max | 57.5 | 1.6 | 55 | 1.7 | −2.5 | 57.6 | 1.7 | 57.3 | 1.3 | −0.4 | 57.5 | 1.6 | 56.1 | 1.9 | −1.5 | 0.966 | 0.899 | 0.428 | 0.672 | ||
| tandem | 54.6 | 3.9 | 52.1 | 4.8 | −2.5 | 54.8 | 4.1 | 55.7 | 3.2 | 0.9 | 54.7 | 4 | 53.9 | 4.4 | −0.8 | 0.729 | 0.899 | 0.776 | 0.852 | ||
| Item | Gait Pattern | LR | Unstandardized Coefficients B | Constant | 95% CI for B (p Value) | R2 | ICC (2, k) | 95% CI for ICC (2,k) | Cronbach’s Alpha |
|---|---|---|---|---|---|---|---|---|---|
| Step length | com | L | 0.975 | 12.33 | 0.809 to 1.142 (p = 0.000) | 0.888 | 0.952 | 0.702–0.986 | 0.972 |
| R | 0.975 | 13.312 | 0.820 to 1.130 (p = 0.000) | 0.901 | 0.957 | 0.713–0.987 | 0.975 | ||
| LR | 0.975 | 18.548 | 0.869 to 1.082 (p = 0.000) | 0.898 | 0.953 | 0.721–0.984 | 0.974 | ||
| max | L | 0.676 | 4.997 | 0.391 to 0.962 (p = 0.000) | 0.571 | 0.866 | 0.660–0.948 | 0.867 | |
| R | 0.898 | 7.144 | 0.632 to 1.165 (p = 0.000) | 0.746 | 0.923 | 0.788–0.972 | 0.932 | ||
| LR | 0.76 | 8.197 | 0.572 to 0.948 (p = 0.000) | 0.648 | 0.888 | 0.781–0.943 | 0.895 | ||
| tandem | L | 0.933 | 12.12 | 0.771 to 1.096 (p = 0.000) | 0.89 | 0.973 | 0.930–0.989 | 0.973 | |
| R | 0.993 | 15.908 | 0.861 to 1.125 (p = 0.000) | 0.933 | 0.984 | 0.960–0.994 | 0.984 | ||
| LR | 0.958 | 19.39 | 0.858 to 1.058 (p = 0.000) | 0.91 | 0.977 | 0.957–0.988 | 0.977 | ||
| Gait speed | com | L | 1.027 | 13.262 | 0.864 to 1.190 (p = 0.000) | 0.902 | 0.971 | 0.923–0.989 | 0.974 |
| R | 1.01 | 21.948 | 0.913 to 1.107 (p = 0.000) | 0.962 | 0.986 | 0.930–0.995 | 0.991 | ||
| LR | 1.019 | 23.124 | 0.930 to 1.108 (p = 0.000) | 0.932 | 0.978 | 0.943–0.990 | 0.982 | ||
| max | L | 0.95 | 10.581 | 0.760 to 1.139 (p = 0.000) | 0.86 | 0.957 | 0.866–0.984 | 0.965 | |
| R | 1.246 | 15.471 | 1.075 to 1.417 (p = 0.000) | 0.933 | 0.953 | 0.791–0.985 | 0.968 | ||
| LR | 1.057 | 16.385 | 0.926 to 1.188 (p = 0.000) | 0.881 | 0.954 | 0.859–0.981 | 0.966 | ||
| tandem | L | 0.946 | 22.341 | 0.857 to 1.036 (p = 0.000) | 0.965 | 0.991 | 0.976–0.996 | 0.991 | |
| R | 1.086 | 29.946 | 1.009 to 1.162 (p = 0.000) | 0.98 | 0.994 | 0.983–0.998 | 0.993 | ||
| LR | 1.008 | 33.265 | 0.947 to 1.070 (p = 0.000) | 0.968 | 0.992 | 0.984–0.996 | 0.992 | ||
| Stride time | com | L | 1.167 | 8.877 | 0.890 to 1.443 (p = 0.000) | 0.804 | 0.932 | 0.832–0.973 | 0.932 |
| R | 1.034 | 7.692 | 0.751 to 1.316 (p = 0.000) | 0.754 | 0.93 | 0.822–0.972 | 0.927 | ||
| LR | 1.105 | 11.922 | 0.917 to 1.292 (p = 0.000) | 0.783 | 0.93 | 0.869–0.963 | 0.929 | ||
| max | L | 0.946 | 8.261 | 0.704 to 1.188 (p = 0.000) | 0.789 | 0.94 | 0.844–0.977 | 0.944 | |
| R | 1.029 | 13.65 | 0.869 to 1.189 (p = 0.000) | 0.916 | 0.978 | 0.943–0.992 | 0.978 | ||
| LR | 0.987 | 14.238 | 0.846 to 1.128 (p = 0.000) | 0.849 | 0.957 | 0.914–0.978 | 0.959 | ||
| tandem | L | 0.829 | 16.527 | 0.723 to 0.935 (p = 0.000) | 0.938 | 0.979 | 0.947–0.992 | 0.979 | |
| R | 0.969 | 21.006 | 0.872 to 1.066 (p = 0.000) | 0.961 | 0.991 | 0.976–0.996 | 0.991 | ||
| LR | 0.88 | 24.911 | 0.808 to 0.951 (p = 0.000) | 0.944 | 0.983 | 0.968–0.991 | 0.983 | ||
| Stride length | com | L | 0.97 | 10.641 | 0.778 to 1.161 (p = 0.000) | 0.855 | 0.963 | 0.907–0.985 | 0.963 |
| R | 0.967 | 15.972 | 0.840 to 1.094 (p = 0.000) | 0.93 | 0.973 | 0.849–0.992 | 0.983 | ||
| LR | 0.974 | 18.003 | 0.856 to 1.084 (p = 0.000) | 0.892 | 0.967 | 0.927–0.984 | 0.972 | ||
| max | L | 0.663 | 6.357 | 0.443 to 0.883 (p = 0.000) | 0.686 | 0.902 | 0.747–0.963 | 0.899 | |
| R | 1.122 | 8.802 | 0.851 to 1.392 (p = 0.000) | 0.818 | 0.928 | 0.774–0.975 | 0.942 | ||
| LR | 0.83 | 9.511 | 0.653 to 1.007 (p = 0.000) | 0.713 | 0.913 | 0.830–0.956 | 0.918 | ||
| tandem | L | 0.93 | 14.475 | 0.795 to 1.066 (p = 0.000) | 0.921 | 0.979 | 0.944–0.992 | 0.98 | |
| R | 1.097 | 14.144 | 0.934 to 1.261 (p = 0.000) | 0.917 | 0.976 | 0.939–0.991 | 0.975 | ||
| LR | 1.009 | 19.785 | 0.905 to 1.112 (p = 0.000) | 0.913 | 0.977 | 0.955–0.988 | 0.977 |
| Item | Gait Pattern | LR | Unstandardized Coefficients B | Constant | 95% CI for B (p Value) | R2 | ICC (3, k) | 95% CI for ICC (3, k) | Cronbach’s Alpha |
|---|---|---|---|---|---|---|---|---|---|
| TLA | com | L | 1.052 | 11.333 | 0.857 to 1.247 (p = 0.000) | 0.87 | 0.964 | 0.909–0.986 | 0.964 |
| R | 0.977 | 6.209 | 0.646 to 1.308 (p = 0.000) | 0.664 | 0.898 | 0.741–0.959 | 0.898 | ||
| LR | 0.948 | 10.034 | 0.757 to 1.139 (p = 0.000) | 0.719 | 0.917 | 0.844–0.956 | 0.917 | ||
| max | L | 1.122 | 10.19 | 0.890 to 1.355 (p = 0.000) | 0.851 | 0.953 | 0.878–0.982 | 0.953 | |
| R | 1.067 | 6.382 | 0.713 to 1.422 (p = 0.000) | 0.7 | 0.904 | 0.744–0.964 | 0.904 | ||
| LR | 1.081 | 10.693 | 0.876 to 1.286 (p = 0.000) | 0.759 | 0.922 | 0.849–0.960 | 0.922 | ||
| tandem | L | 1.144 | 13.782 | 0.969 to 1.319 (p = 0.000) | 0.913 | 0.971 | 0.924–0.989 | 0.971 | |
| R | 0.994 | 10.65 | 0.797 to 1.191 (p = 0.000) | 0.862 | 0.964 | 0.907–0.986 | 0.964 | ||
| LR | 1.055 | 16.664 | 0.927 to 1.184 (p = 0.000) | 0.882 | 0.966 | 0.935–0.982 | 0.966 | ||
| Hip | |||||||||
| com | flexion | L | 1.018 | 2.562 | 0.183 to 1.854 (p = 0.200) | 0.226 | 0.589 | −0.039–0.837 | 0.589 |
| R | 0.737 | 2.449 | 0.105 to 1.369 (p = 0.250) | 0.208 | 0.634 | 0.076–0.855 | 0.634 | ||
| LR | 0.854 | 3.596 | 0.373 to 1.335 (p = 0.000) | 0.234 | 0.612 | 0.266–0.795 | 0.301 | ||
| extension | L | 1.39 | 7.204 | 0.985 to 1.796 (p = 0.000) | 0.728 | 0.871 | 0.674–0.949 | 0.871 | |
| R | 1.013 | 4.843 | 0.573 to 1.452 (p = 0.000) | 0.542 | 0.837 | 0.589–0.936 | 0.837 | ||
| LR | 1.186 | 8.318 | 0.897 to 1.474 (p = 0.000) | 0.636 | 0.855 | 0.725–0.923 | 0.855 | ||
| max | flexion | L | 0.267 | 0.783 | −0.452 to 0.986 (p = 0.445) | 0.022 | 0.298 | −0.822–0.730 | 0.298 |
| R | 0.371 | 1.021 | −0.400 to 1.142 (p = 0.322) | 0.02 | 0.372 | −0.680–0.765 | 0.372 | ||
| LR | 0.318 | 1.316 | −0.172 to 0.808 (p = 0.197) | 0.02 | 0.336 | −0.289–0.658 | 0.336 | ||
| extension | L | 1.596 | 7.308 | 1.136 to 2.057 (p = 0.000) | 0.744 | 0.845 | 0.599–0.940 | 0.845 | |
| R | 1.231 | 5.129 | 0.722 to 1.739 (p = 0.000) | 0.598 | 0.835 | 0.558–0.938 | 0.835 | ||
| LR | 1.397 | 8.731 | 1.072 to 1.722 (p = 0.000) | 0.676 | 0.841 | 0.692–0.918 | 0.841 | ||
| tandem | flexion | L | 0.663 | 2.187 | 0.023 to 1.302 (p = 0.043) | 0.174 | 0.613 | −0.005–0.851 | 0.613 |
| R | 0.865 | 2.747 | 0.201 to 1.530 (p = 0.014) | 0.267 | 0.67 | 0.144–0.873 | 0.67 | ||
| LR | 0.75 | 3.568 | 0.324 to 1.176 (p = 0.001) | 0.241 | 0.645 | 0.316–0.815 | 0.645 | ||
| extension | L | 1.657 | 7.455 | 1.188 to 2.126 (p = 0.000) | 0.752 | 0.839 | 0.582–0.938 | 0.839 | |
| R | 1.019 | 5.803 | 0.176 to 0.815 (p = 0.000) | 0.645 | 0.886 | 0.704–0.956 | 0.886 | ||
| LR | 1.246 | 8.775 | 0.142 to 0.825 (p = 0.000) | 0.673 | 0.864 | 0.738–0.929 | 0.864 | ||
| knee | |||||||||
| com | flexion | L | 2.226 | 3.652 | 0.945 to 3.507 (p = 0.002) | 0.394 | 0.521 | −0.211–0.810 | 0.521 |
| R | 2.241 | 4.43 | 1.178 to 3.303 (p = 0.000) | 0.495 | 0.593 | −0.027–0.839 | 0.593 | ||
| LR | 2.228 | 6.008 | 1.477 to 2.979 (p = 0.000) | 0.474 | 0.57 | 0.186–0.772 | 0.57 | ||
| extension | L | 1.129 | 3.579 | 0.466 to 1.791 (p = 0.002) | 0.383 | 0.714 | 0.278–0.887 | 0.714 | |
| R | 1.174 | 3.452 | 0.460 to 1.889 (p = 0.003) | 0.365 | 0.69 | 0.216–0.87 | 0.69 | ||
| LR | 1.125 | 5.044 | 0.674 to 1.577 (p = 0.000) | 0.385 | 0.702 | 0.437–0.843 | 0.702 | ||
| max | flexion | L | 1.119 | 2.625 | 0.220 to 2.019 (p = 0.018) | 0.247 | 0.591 | −0.063–0.842 | 0.591 |
| R | 2.095 | 3.425 | 0.798 to 3.391 (p = 0.003) | 0.387 | 0.538 | −0.234–0.827 | 0.538 | ||
| LR | 1.692 | 4.388 | 0.909 to 2.475 (p = 0.000) | 0.336 | 0.544 | 0.113–0.765 | 0.544 | ||
| extension | L | 0.821 | 2.429 | 0.108 to 1.534 (p = 0.027) | 0.214 | 0.625 | 0.025–0.855 | 0.625 | |
| R | 1.624 | 4.67 | 0.887 to 2.361 (p = 0.000) | 0.55 | 0.737 | 0.296–0.901 | 0.737 | ||
| LR | 1.172 | 4.629 | 0.658 to 1.686 (p = 0.000) | 0.362 | 0.673 | 0.366–0.832 | 0.673 | ||
| tandem | flexion | L | 1.229 | 2.794 | 0.301 to 2.156 (p = 0.012) | 0.274 | 0.595 | −0.050–0.844 | 0.595 |
| R | 1.697 | 4.017 | 0.806 to 2.589 (p = 0.000) | 0.457 | 0.659 | 0.114–0.868 | 0.659 | ||
| LR | 1.51 | 5.088 | 0.908 to 2.112 (p = 0.000) | 0.402 | 0.638 | 0.303–0.812 | 0.638 | ||
| extension | L | 0.83 | 3.249 | 0.291 to 1.369 (p = 0.005) | 0.347 | 0.745 | 0.337–0.902 | 0.745 | |
| R | 1.054 | 4.235 | 0.529 to 1.579 (p = 0.000) | 0.485 | 0.8 | 0.480–0.923 | 0.8 | ||
| LR | 0.929 | 5.298 | 0.574 to 1.285 (p = 0.000) | 0.423 | 0.77 | 0.557–0.880 | 0.77 |
| Parameter | Gait Pattern | LR | Fixed Bias | Proportional Bias | ||
|---|---|---|---|---|---|---|
| Bias | 95% CI for Bias (p Value) | LoA (Upper–Lower) | Regression Equation (p Value) | |||
| Step length | com | L | 14.215 | 6.787 to 21.643 (p = 0.001) | −16.895 to 45.325 | y = 0.032x − 7.915 (p = 0.690) |
| R | 13.92 | 6.827 to 21.013 (p = 0.001) | −15.785 to 43.625 | y = 0.024x − 2.687 (p = 0.748) | ||
| LR | 14.068 | 9.168 to 18.967 (p = 0.000) | −15.957 to 44.092 | y = 0.028x − 5.292 (p = 0.597) | ||
| max | L | 9.647 | −10.120 to 29.415 (p = 0.319) | −70.737 to 90.031 | y = −0.148x + 125.974 (p = 0.405) | |
| R | 11.25 | −1.528 to 24.028 (p = 0.081) | −39.114 to 61.614 | y = 0.031x − 13.402 (p = 0.815) | ||
| LR | 10.427 | −0.897 to 21.751 (p = 0.070) | −56.140 to 76.994 | y = −0.071x + 66.694 (p = 0.518) | ||
| tandem | L | 5.816 | −6.400 to 18.032 (p = 0.330) | −43.860 to 55.491 | y =−0.015x + 15.465 (p = 0.858) | |
| R | −0.205 | −8.833 to 8.422 (p = 0.961) | −35.289 to 34.879 | y = 0.026x − 17.359 (p = 0.681) | ||
| LR | 2.805 | −4.379 to 9.989 (p = 0.434) | −40.032 to 45.643 | y = 0.003x + 0.723 (p = 0.951) | ||
| Gait speed | com | L | 0.016 | −0.002 to 0.034 (p = 0.080) | −0.060 to 0.092 | y = 0.084x − 0.099 (p = 0.281) |
| R | 0.017 | 0.006 to 0.027 (p = 0.005) | −0.029 to 0.062 | y = 0.040x − 0.039 (p = 0.399) | ||
| LR | 0.016 | 0.006 to 0.026 (p = 0.002) | −0.045 to 0.078 | y = 0.063x − 0.070 (p = 0.158) | ||
| max | L | 0.036 | 0.005 to 0.068 (p = 0.025) | −0.091 to 0.163 | y = 0.019x + 0.002 (p = 0.842) | |
| R | 0.041 | 0.014 to 0.067 (p = 0.005) | −0.063 to 0.144 | y = 0.248x − 0.415 (p = 0.001) | ||
| LR | 0.038 | 0.019 to 0.058 (p = 0.000) | −0.076 to 0.153 | y = 0.116x − 0.175 (p = 0.055) | ||
| tandem | L | −0.013 | −0.035 to 0.007 (p = 0.186) | −0.099 to 0.071 | y = −0.037x + 0.032 (p = 0.425) | |
| R | 0.001 | −0.016 to 0.017 (p = 0.948) | −0.067 to 0.068 | y = 0.091x − 0.113 (p = 0.009) | ||
| LR | −0.007 | −0.020 to 0.006 (p = 0.309) | −0.084 to 0.071 | y = 0.025x − 0.038 (p = 0.393) | ||
| Stride time | com | L | −0.005 | −0.015 to 0.005 (p = 0.322) | −0.046 to 0.036 | y = 0.268x − 0.276 (p = 0.020) |
| R | 0.002 | −0.008 to 0.012 (p = 0.666) | −0.041 to 0.045 | y = 0.177x − 0.178 (p = 0.160) | ||
| LR | −0.001 | −0.008 to 0.006 (p = 0.703) | −0.043 to 0.041 | y = 0.230x − 0.235 (p = 0.005) | ||
| max | L | −0.011 | −0.026 to 0.004 (p = 0.139) | −0.071 to 0.049 | y = 0.059x − 0.062 (p = 0.613) | |
| R | −0.004 | −0.013 to 0.005 (p = 0.329) | −0.039 to 0.031 | y = 0.071x − 0.067 (p = 0.336) | ||
| LR | −0.008 | −0.016 to 0.001 (p = 0.072) | −0.057 to 0.041 | y = 0.069x − 0.068 (p = 0.310) | ||
| tandem | L | −0.007 | −0.028 to 0.015 (p = 0.531) | −0.094 to 0.081 | y = −0.159x + 0.168 (p = 0.015) | |
| R | −0.004 | −0.016 to 0.007 (p = 0.441) | −0.052 to 0.043 | y = − 0.013x + 0.009 (p = 0.792) | ||
| LR | −0.005 | −0.017 to 0.006 (p = 0.348) | −0.075 to 0.064 | y = −0.101x + 0.105 (p = 0.015) | ||
| Stride length | com | L | 8.2 | −8.593 to 24.993 (p = 0.320) | −62.126 to 78.526 | y = 0.044x − 53.201 (p = 0.629) |
| R | 19.65 | 8.450 to 30.850 (p = 0.002) | −27.253 to 66.553 | y = 0.001x + 18.656 (p = 0.991) | ||
| LR | 13.925 | 4.121 to 23.729 (p = 0.007) | −46.162 to 74.012 | y = 0.030x − 28.004 (p = 0.580) | ||
| max | L | 8.632 | −22.800 to 40.063 (p = 0.571) | −119.184 to 136.447 | y = −0.255x + 410.081 (p = 0.089) | |
| R | 26.222 | 3.001 to 49.443 (p = 0.029) | −65.300 to 117.744 | y = 0.217x − 322.206 (p = 0.059) | ||
| LR | −0.877 | −0.898 to −0.856 (p = 0.000) | −1.000 to −0.754 | y = −1.284x − 0.324 (p = 0.000) | ||
| tandem | L | −14.895 | −34.194 to 4.405 (p = 0.122) | −93.376 to 63.587 | y = −0.034x + 29.652 (p = 0.625) | |
| R | −4.368 | −26.311 to 17.572 (p = 0.681) | −93.599 to 84.862 | y = 0.136x − 185.575 (p = 0.065) | ||
| LR | −9.632 | −23.641 to 4.378 (p = 0.172) | −93.173 to 73.910 | y = 0.054x − 80.695 (p = 0.285) |
| Fixed Bias | Proportional Bias | |||||
|---|---|---|---|---|---|---|
| Bias | 95% CI for Bias (p Value) | LoA (Upper–Lower) | Regression Equation (p Value) | |||
| TLA | com | L | 1.515 | 1.088 to 1.942 (p = 0.000) | −0.273 to 3.303 | y = 0.119x − 1.199 (p = 0.169) |
| R | 0.315 | −0.348 to 0.978 (p = 0.332) | −2.461 to 3.091 | y = 0.184x − 3.989 (p = 0.220) | ||
| LR | 0.915 | 0.492 to 1.338 (p = 0.000) | −1.679 to 3.509 | y = 0.115x − 1.738 (p = 0.213) | ||
| max | L | 1.574 | 1.098 to 2.049 (p = 0.000) | −0.361 to 3.508 | y = 0.204x − 3.824 (p = 0.045) | |
| R | 0.917 | 0.170 to 1.663 (p = 0.019) | −2.025 to 3.858 | y = 0.204x − 3.824 (p = 0.045) | ||
| LR | 1.254 | 0.824 to 1.683 (p = 0.000) | −1.272 to 3.780 | y = 0.226x − 4.709 (p = 0.014) | ||
| tandem | L | 1.342 | 0.858 to 1.827 (p = 0.000) | −0.628 to 3.312 | y = 0.181x − 2.537 (p = 0.020) | |
| R | 0.989 | 0.418 to 1.561 (p = 0.002) | −1.333 to 3.312 | y = 0.063x − 0.374 (p = 0.492) | ||
| LR | 1.166 | 0.805 to 1.527 (p = 0.000) | −0.987 to 3.319 | y = 0.117x − 1.348 (p = 0.050) | ||
| Hip | ||||||
| com | flexion | L | 3.48 | 0.718 to 6.242 (p = 0.016) | −8.086 to 15.046 | y = 1.444x − 38.717 (p = 0.000) |
| R | 0.29 | −2.762 to 3.342 (p = 0.844) | −12.490 to 13.070 | y = 1.103x − 35.362 (p = 0.005) | ||
| LR | 1.885 | −0.145 to 3.915 (p = 0.068) | −10.556 to 14.326 | y = 0.873x − 24.963 (p = 0.001) | ||
| extension | L | −1.695 | −4.487 to 1.097 (p = 0.219) | −13.387 to 9.997 | y = 0.961x + 10.987 (p = 0.001) | |
| R | 1.98 | −0.924 to 4.884 (p = 0.000) | −10.180 to 14.140 | y = 1.187x + 18.913 (p = 0.002) | ||
| LR | 0.143 | −1.869 to 2.154 (p = 0.000) | −12.184 to 12.469 | y = 0.958x + 13.301 (p = 0.000) | ||
| max | flexion | L | 5.347 | 2.085 to 8.610 (p = 0.003) | −7.920 to 18.614 | y = 1.462x − 40.308 (p = 0.000) |
| R | 0.089 | −3.407 to 3.585 (p = 0.958) | −13.691 to 13.869 | y = 1.479x − 51.210 (p = 0.002) | ||
| LR | 2.789 | 0.354 to 5.224 (p = 0.026) | −11.527 to 17.105 | y = 0.800x − 23.526 (p = 0.013) | ||
| extension | L | −0.337 | −3.357 to 2.683 (p = 0.817) | −12.619 to 11.945 | y = 1.154x + 18.004 (p = 0.000) | |
| R | 0.089 | −3.407 to 3.585 (p = 0.958) | −13.691 to 13.869 | y = 1.479x − 51.210 (p = 0.002) | ||
| LR | −1.008 | −3.222 to 1.206 (p = 0.362) | −14.022 to 12.006 | y = 1.011x + 15.016 (p = 0.000) | ||
| tandem | flexion | L | 4.463 | 1.305 to 7.621 (p = 0.008) | −8.379 to 17.305 | y = 1.328x − 34.560 (p = 0.001) |
| R | 0.837 | −2.603 to 4.276 (p = 0.615) | −13.150 to 14.823 | y = 0.825x − 26.217 (p = 0.108) | ||
| LR | −2.95 | −5.412 to −0.488 (p = 0.020) | −17.629 to 11.729 | y = 0.244x − 4.783 (p = 0.215) | ||
| extension | L | −0.037 | −3.296 to 3.222 (p = 0.981) | −13.291 to 13.217 | y = 1.066x + 12.899 (p = 0.000) | |
| R | 0.658 | −2.566 to 3.882 (p = 0.673) | −12.451 to 13.767 | y = 0.427x + 6.129 (p = 0.221) | ||
| LR | 0.311 | −1.873 to 2.494 (p = 0.775) | −12.710 to 13.331 | y = 0.776x + 9.985 (p = 0.000) | ||
| Knee | ||||||
| com | flexion | L | 0.71 | −2.695 to 4.115 (p = 0.667) | −13.550 to 14.970 | y = 1.339x − 87.008 (p = 0.000) |
| R | −0.035 | −4.716 to 4.646 (p = 0.988) | −19.639 to 19.569 | y = 1.174x − 76.726 (p = 0.000) | ||
| LR | 0.338 | −2.426 to 3.101 (p = 0.806) | −16.599 to 17.274 | y = 1.232x − 80.288 (p = 0.000) | ||
| extension | L | −3.53 | −6.060 to 1.000 (p = 0.009) | −14.123 to 7.063 | y = 0.679x − 8.795 (p = 0.003) | |
| R | −1.22 | −4.769 to 2.329 (p = 0.481) | −16.083 to 13.643 | y = 0.746x − 6.505 (p = 0.038) | ||
| LR | −2.375 | −4.487 to −0.263 (p = 0.029) | −15.319 to 10.569 | y = 0.690x − 7.495 (p = 0.001) | ||
| max | flexion | L | 2.311 | −0.828 to 5.449 (p = 0.139) | −10.451 to 15.072 | y = 1.040x − 65.994 (p = 0.000) |
| R | −6.317 | −13.728 to 1.095 (p = 0.090) | −35.528 to 22.895 | y = 1.539x − 109.002 (p = 0.001) | ||
| LR | −1.886 | −5.904 to 2.131 (p = 0.347) | −0.725 to 4.951 | y = 1.287x − 87.037 (p = 0.000) | ||
| extension | L | −3.521 | −6.160 to −0.882 (p = 0.012) | −14.252 to 7.210 | y = 0.665x − 8.515 (p = 0.017) | |
| R | −9.739 | −15.514 to −3.963 (p = 0.002) | −32.502 to 13.025 | y = 0.481x − 13.804 (p = 0.382) | ||
| LR | −6.546 | −9.685 to −3.407 (p = 0.000) | −24.996 to 11.904 | y = 0.490x − 10.446 (p = 0.134) | ||
| tandem | flexion | L | 1.089 | −1.922 to 34.101 (p = 0.457) | −11.158 to 13.337 | y = 1.007x − 64.210 (p = 0.000) |
| R | −2.474 | −6.716 to 1.768 (p = 0.236) | −19.724 to 14.777 | y = 0.599x − 42.236 (p = 0.027) | ||
| LR | −0.692 | −3.237 to 1.853 (p = 0.585) | −15.867 to 14.482 | y = 0.659x − 43.948 (p = 0.001) | ||
| extension | L | −2.289 | −5.220 to 0.641 (p = 0.001) | −14.208 to 9.629 | y = 0.398x − 5.309 (p = 0.103) | |
| R | −3.611 | −7.851 to 0.630 (p = 0.090) | −20.853 to 13.632 | y = 0.129 − 4.573 (p = 0.680) | ||
| LR | −2.95 | −5.412 to −0.488 (p = 0.020) | −17.629 to 11.729 | y = 0.244 − 4.783 (p = 0.215) | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsuda, T.; Fujino, Y.; Makabe, H.; Morisawa, T.; Takahashi, T.; Kakegawa, K.; Matsumoto, T.; Kiyohara, T.; Torimoto, Y.; Miwa, M.; et al. Validity Verification of Human Pose-Tracking Algorithms for Gait Analysis Capability. Sensors 2024, 24, 2516. https://doi.org/10.3390/s24082516
Matsuda T, Fujino Y, Makabe H, Morisawa T, Takahashi T, Kakegawa K, Matsumoto T, Kiyohara T, Torimoto Y, Miwa M, et al. Validity Verification of Human Pose-Tracking Algorithms for Gait Analysis Capability. Sensors. 2024; 24(8):2516. https://doi.org/10.3390/s24082516
Chicago/Turabian StyleMatsuda, Tadamitsu, Yuji Fujino, Hitoshi Makabe, Tomoyuki Morisawa, Tetsuya Takahashi, Kei Kakegawa, Takanari Matsumoto, Takehiko Kiyohara, Yasuo Torimoto, Masaki Miwa, and et al. 2024. "Validity Verification of Human Pose-Tracking Algorithms for Gait Analysis Capability" Sensors 24, no. 8: 2516. https://doi.org/10.3390/s24082516
APA StyleMatsuda, T., Fujino, Y., Makabe, H., Morisawa, T., Takahashi, T., Kakegawa, K., Matsumoto, T., Kiyohara, T., Torimoto, Y., Miwa, M., Fujiwara, T., & Daida, H. (2024). Validity Verification of Human Pose-Tracking Algorithms for Gait Analysis Capability. Sensors, 24(8), 2516. https://doi.org/10.3390/s24082516