1. Introduction
In autonomous robot navigation, attaining cost-effective, highly precise, and real-time localization is imperative. A differential robot [
1] is a type of autonomous robot based on a differential drive, which means controlling the speed difference between two wheels to achieve direction control and turning. This simple and efficient design makes differential robots popular for various applications. Wheel odometry [
2] is one of the commonly used navigation methods for differential robots, which serves as a sensor for measuring the displacement and direction of a moving vehicle. It uses pulse count data generated by encoders to measure the rotation angle of wheels [
3] and computes the vehicle’s motion through established motion models. While wheel odometry presents advantages such as affordability and real-time performance, it is susceptible to issues of error accumulation [
4]. The precision of measurement can be affected by tire slippage, tire deformation, uneven ground surfaces, and other factors. Consequently, in practical applications, the integration of wheel odometry with other sensors is often employed to enhance the accuracy and robustness of localization.
Geomagnetic-aided navigation (GMN) [
5] is a technique that utilizes Earth’s magnetic field information for navigation. It supports other navigation systems, such as the inertial navigation system (INS), by correcting the provided position and orientation. This is achieved by matching the measurement of the geomagnetic field intensity at the current position with the geomagnetic reference map of nearby regions. Consequently, this method enhances the navigation accuracy of robots and vehicles. Compared to other localization and navigation methods, GMN offers advantages such as low cost, wide-area coverage, and no cumulative errors [
6,
7]. As a result, it has been widely used in various fields. Recognizing the similarities between odometry and INS regarding high short-term positioning accuracy and the presence of cumulative errors over long distances [
8], integrating GMN with wheel odometry offers an effective means to correct the accumulated errors in odometry. This integration facilitates long-distance, low-cost, high-precision real-time localization and navigation. The commonly used methods for geomagnetic-assisted navigation include geomagnetic filtering and geomagnetic matching.
Geomagnetic filtering is a real-time method for localization and navigation that analyzes one data point at a time. It addresses the accumulation of positioning errors by refining the current position provided by INS, odometry, and other systems through filtering. A Kalman filter [
9,
10] is one of the commonly used geomagnetic filtering algorithms. In 2014, reference [
11] demonstrated the feasibility of the Sandia inertial terrain-aided navigation algorithm based on the Kalman filter for geomagnetic/INS integrated navigation. The observation of this algorithm relies on a linearized geomagnetic field model. However, geomagnetic models exhibit highly nonlinear characteristics, and the accuracy of the algorithm is affected by the linearization method. In comparison to the Kalman filter, the particle filter [
12] offers better advantages in processing nonlinear geomagnetic data due to its good performance in addressing nonlinear and non-Gaussian estimation problems. In particle filtering, the state of a dynamic system is approximated by a set of weighted particles, with each particle representing a possible state and the associated weight representing the likelihood of that state being true. In 2016, reference [
13] demonstrated the feasibility of the geomagnetic particle filtering algorithm for indoor pedestrian localization. In 2018, the geomagnetic particle filtering algorithm was used to locate autonomous surface vehicles, achieving better results compared to dead reckoning [
14]. In 2020, Quintas et al. compared the effects of the extended Kalman filter, unscented Kalman filter, and particle filter in autonomous underwater vehicle navigation, demonstrating the better robustness of the particle filter in geomagnetic navigation [
15]. In 2022, Lingfeng et al. optimized the geomagnetic particle filter using the firefly algorithm, reducing the problem of particle impoverishment and degradation [
16]. In 2023, Benjamin proposed the use of geomagnetic particle filtering for indoor positioning of differential robots, simultaneously calibrating the magnetometers to effectively reduce the position and orientation errors [
17]. However, such algorithms are prone to significant errors and even divergence in situations with strong geomagnetic noise. In order to avoid this situation, in 2023, Huapeng et al. used a particle filter for underwater positioning and introduced a distance interval between each execution of the algorithm to reduce errors caused by magnetometer measurement noise [
18]. However, the long interval distance between the algorithm executions limits its ability to correct angular error, leading to a decline in positioning accuracy over time due to accumulated angular errors.
The geomagnetic matching method reduces the errors of navigation systems such as INS and odometry by matching the geomagnetic values and relative positions on a trajectory with the reference map. The commonly used geomagnetic matching methods include geomagnetic contour matching algorithms (MAGCOM) [
19], iterative closest contours point (ICCP) [
20], intelligent optimization algorithms [
21], and neural networks [
7]. In 2018, Xiao et al. proposed an improved ICCP algorithm that dynamically selects the appropriate matching length and matching points [
20]. In the same year, Zhuo et al. proposed a geomagnetic vector ICCP algorithm based on searching the principle of trusted point sets, which improves the reliability of positioning compared to scalar matching [
22]. In 2020, Chen et al. compared the applicability of MAGCOM, ICCP, and Sandia inertial magnetic aided navigation (SIMAN) algorithms in GMN for a supersonic aircraft [
23]. In the same year, Wang et al. improved the geomagnetic matching algorithm based on particle swarm optimization (PSO) by using redundant information from geomagnetic measurements to constrain the particles, thus enhancing the algorithm’s noise resistance capability [
24]. In 2022, Xu et al. proposed a combination of a PSO and ICCP algorithm to reduce the impact of initial errors on the ICCP [
25]. In the same year, Jin et al. proposed an ICCP algorithm based on three reference maps of geomagnetic field vector data and demonstrated that using multiple reference maps in ICCP can further reduce the matching errors of single-component ICCP [
26]. In 2023, Zhuo et al. used a probabilistic neural network for geomagnetic matching, which significantly reduced the probability of mismatch compared to traditional algorithms. These algorithms can reduce errors caused by the noise in single-point magnetometer measurements, but they require vehicles to move a certain distance and obtain a data sequence before each matching process, so their real-time performance is not strong. Moreover, most geomagnetic matching algorithms, such as ICCP and MAGCOM, only apply rigid transformations such as translation and rotation to input trajectories [
27]. When applied to geomagnetic/odometry integrated navigation, the performance is limited due to the influence of a significant deviation between the actual trajectory and the matched trajectory shape caused by random factors in the odometry data.
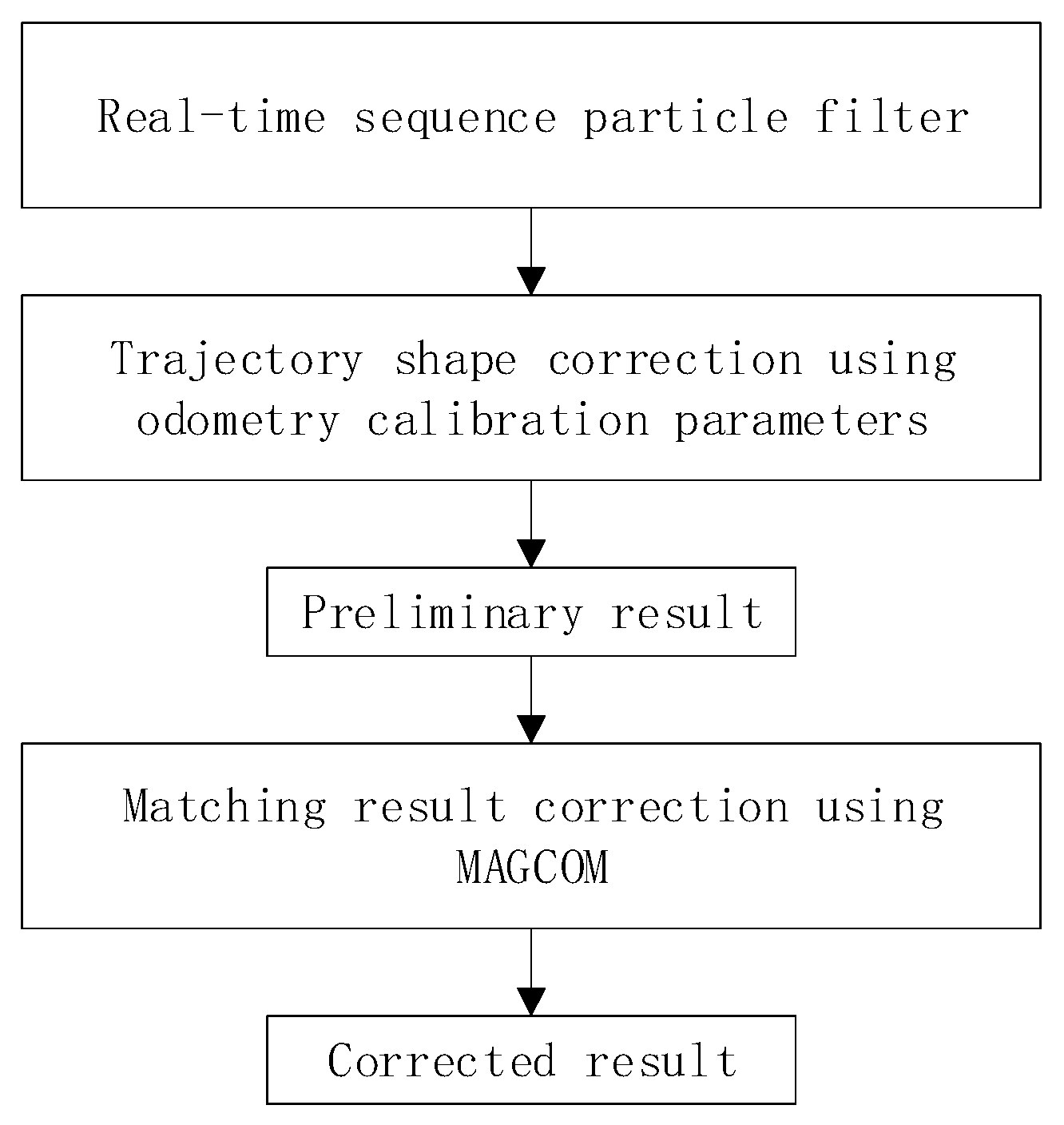
In order to address the issue of the algorithm’s sensitivity to noise and the decrease in accuracy over time due to accumulated errors, this paper proposes a geomagnetic/odometry integrated localization method based on a real-time sequential particle filter (RSPF) for differential robot navigation. The main contributions of this paper can be summarized as follows:
- (1)
Considering the additional errors caused by the influence of noise when the single-point geomagnetic particle filter algorithm operates continuously, we perform real-time sequential particle filtering by modifying the particles from single-point to first-in-first-out (FIFO) sequence using the data sequence from a segment of the trajectory. The particle weights are calculated using the data from the entire sequence, reducing the impact of measurement noise from individual points.
- (2)
To minimize the positioning error caused by sequence matching based on rigid transformation when there is a substantial difference between the actual trajectory and the odometry trajectory, we incorporate the odometry calibration parameters of a differential robot into particles. The shape of the odometry trajectory is adjusted in real time, making it closer to the real trajectory.
- (3)
To further improve the positioning accuracy, secondary matching of the matching results through the MAGCOM algorithm is performed to reduce the positioning errors of the sequential particle filter.
The rest of this paper is organized as follows.
Section 2 describes the framework and design process of the RSPF-based localization method. In
Section 3, simulation tests are given to verify the feasibility of the method.
Section 4 proposes the experimental results and discussion. In
Section 5, our works are concluded.
4. Experiments
The effectiveness of the method proposed in this article under ideal conditions has been validated through simulation experiments. To further demonstrate the practicality of the algorithm, we conduct experiments using a real differential robot and evaluate the performance of the proposed algorithm. We also compare our method with other related algorithms.
4.1. Experiment Environment
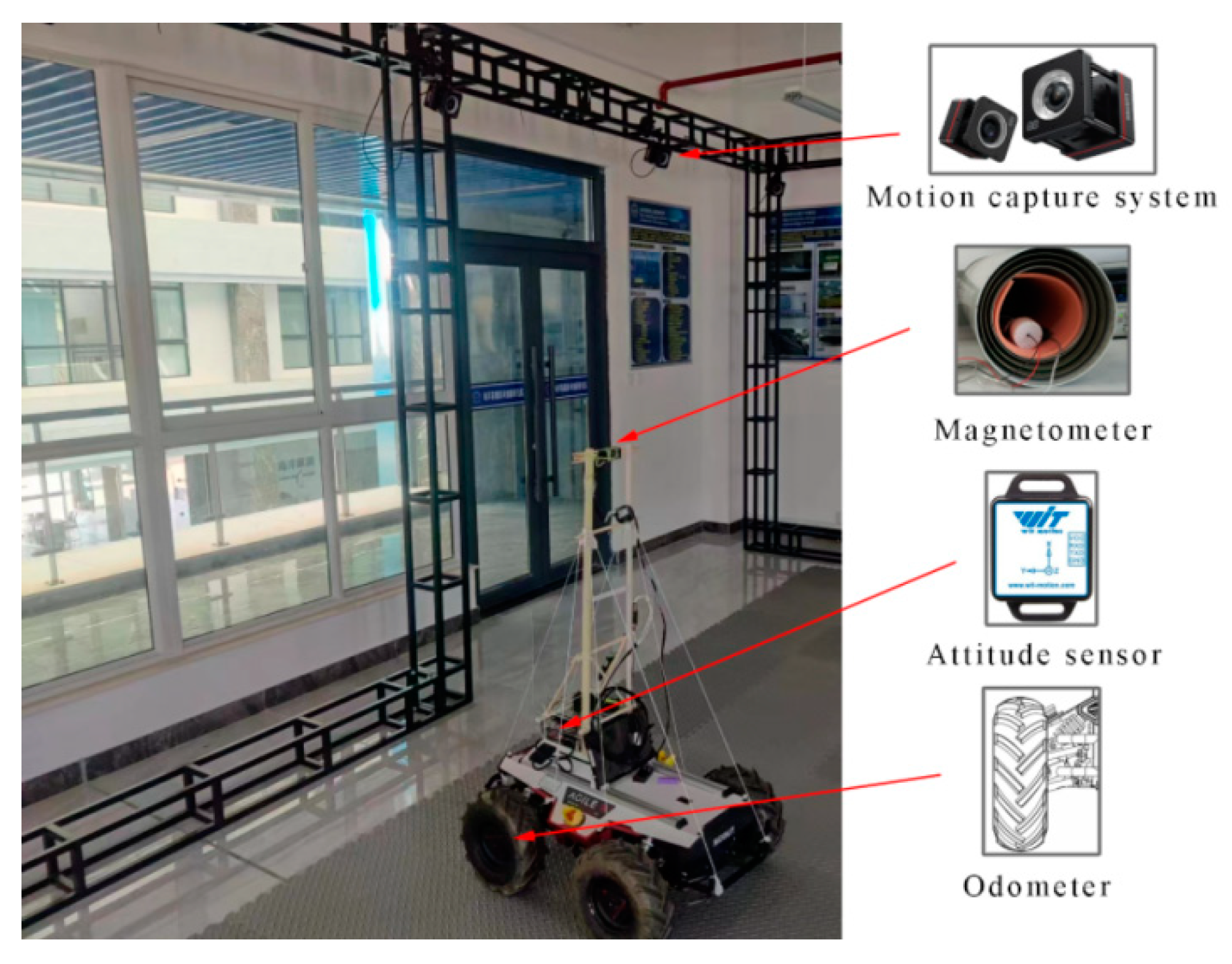
The experimental equipment is shown in
Figure 17. The robot is equipped with a three-axis magnetometer, a WT901C attitude sensor (manufactured by Witmotion Company in Shenzhen, China), and wheeled odometers. The real trajectory of the robot is collected through the FZ Motion optical motion capture system. Using a set of measured location data from FZ Motion to calibrate the odometer, the robot parameters were obtained as
= 148.32 mm,
= 143.47 mm, and
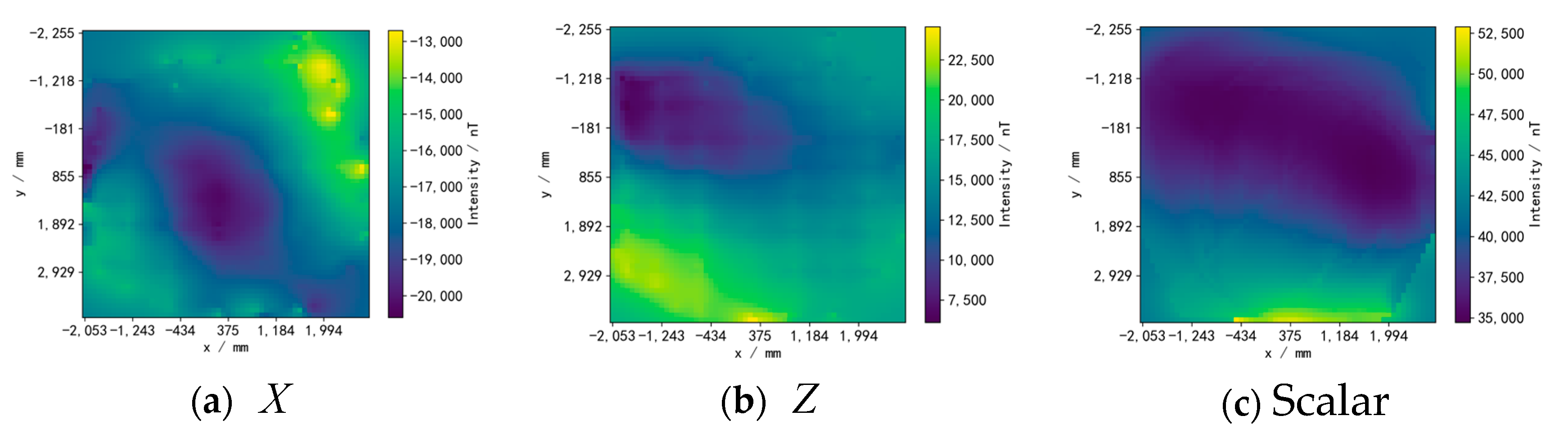
= 484.70 mm. The robot is controlled to move within the area through a remote control while collecting data with a sampling interval of 0.25 s. The total number of trajectory data points is 500–600. The experimental area is limited to 4.85 m × 6.22 m. The experiment used three reference maps of the measured real geomagnetic vectors X and Z, as shown in
Figure 18. The geomagnetic map is divided into 60 × 60 grids, and the maximum magnetic intensity difference between the X, Z, and scalar reference map is 7896.88 nT, 18,473.76 nT, and 18,177.06 nT, respectively.
The comparison algorithms and evaluation metrics used in the experiment are the same as those in the simulation.
Some parameters of the methods used in the experiment are adjusted. For the single-point particle filter, the maximum initial distance for particle positions is set at 500 mm. For the AFPF, the interval for each execution is set at 800 mm, and the maximum initial distance for particle positions is 500 mm. For the RSPF-based localization method, we set = 0.3 and = 0.3, and is set to 10 to achieve better robustness. Other parameters are the same as the simulation.
4.2. Experimental Results and Performance Evaluation
This paper conducts matching experiments on 10 sets of real trajectories and presents a comparative analysis of the performance of the proposed method and related methods.
4.2.1. Experimental Results
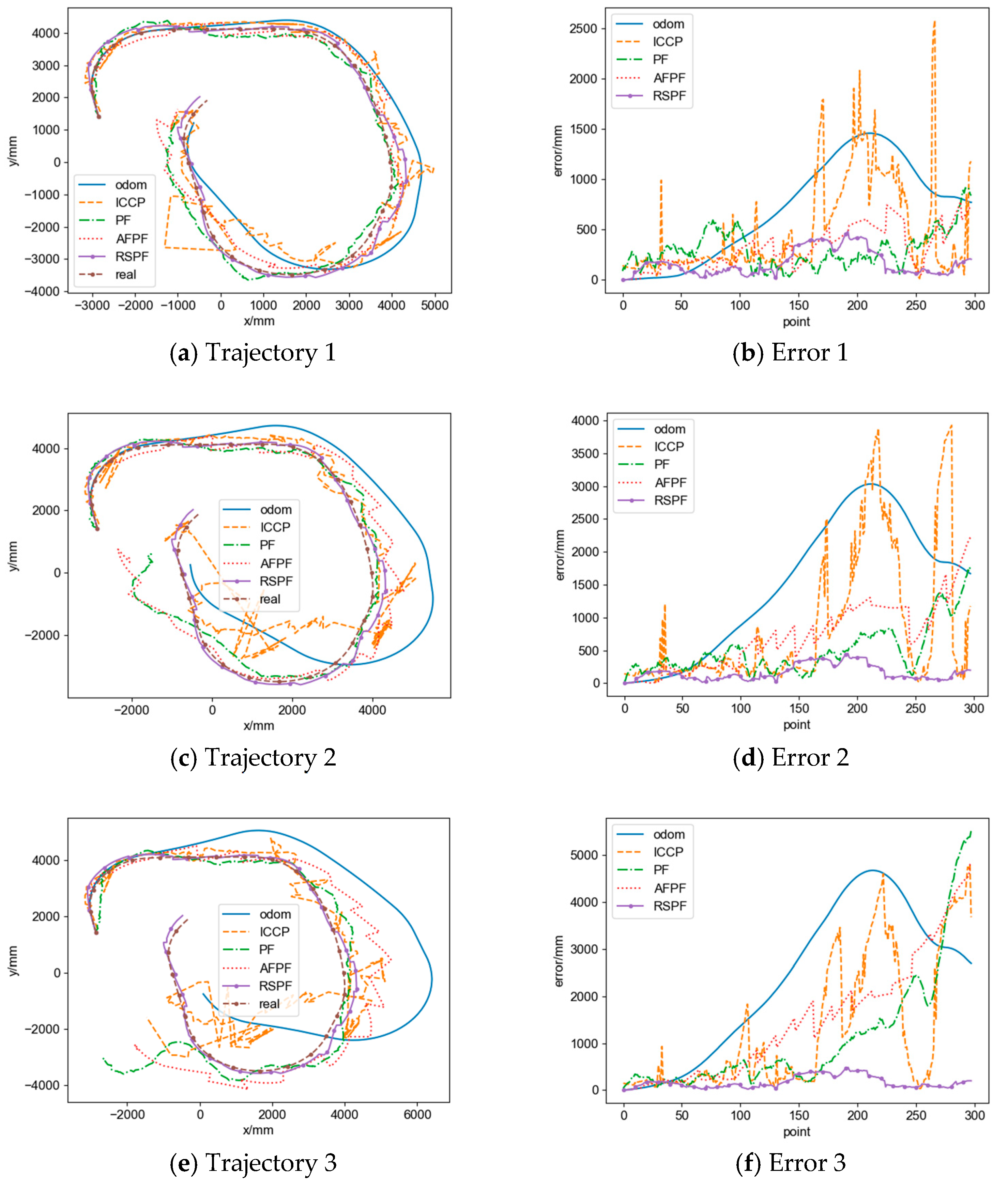
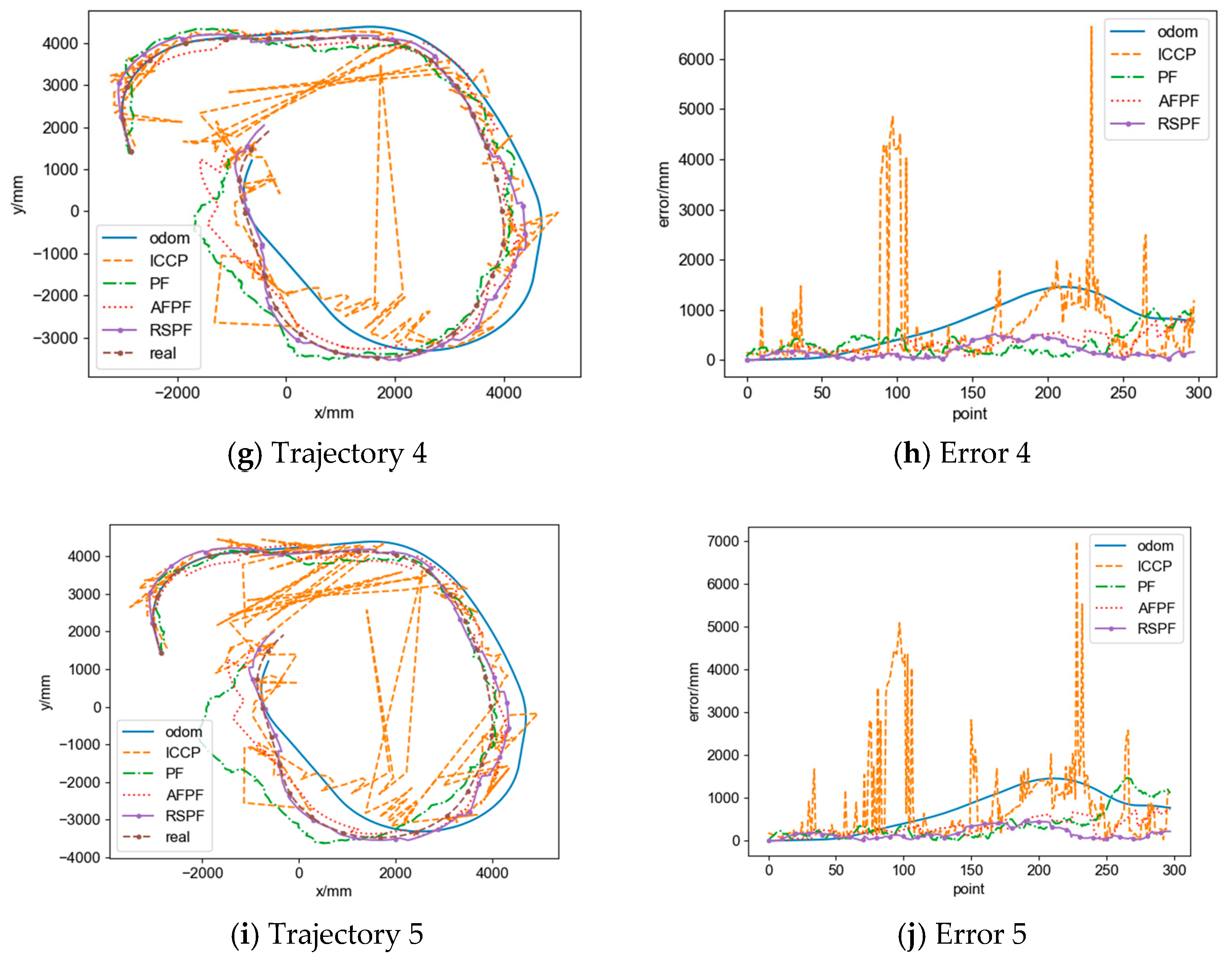
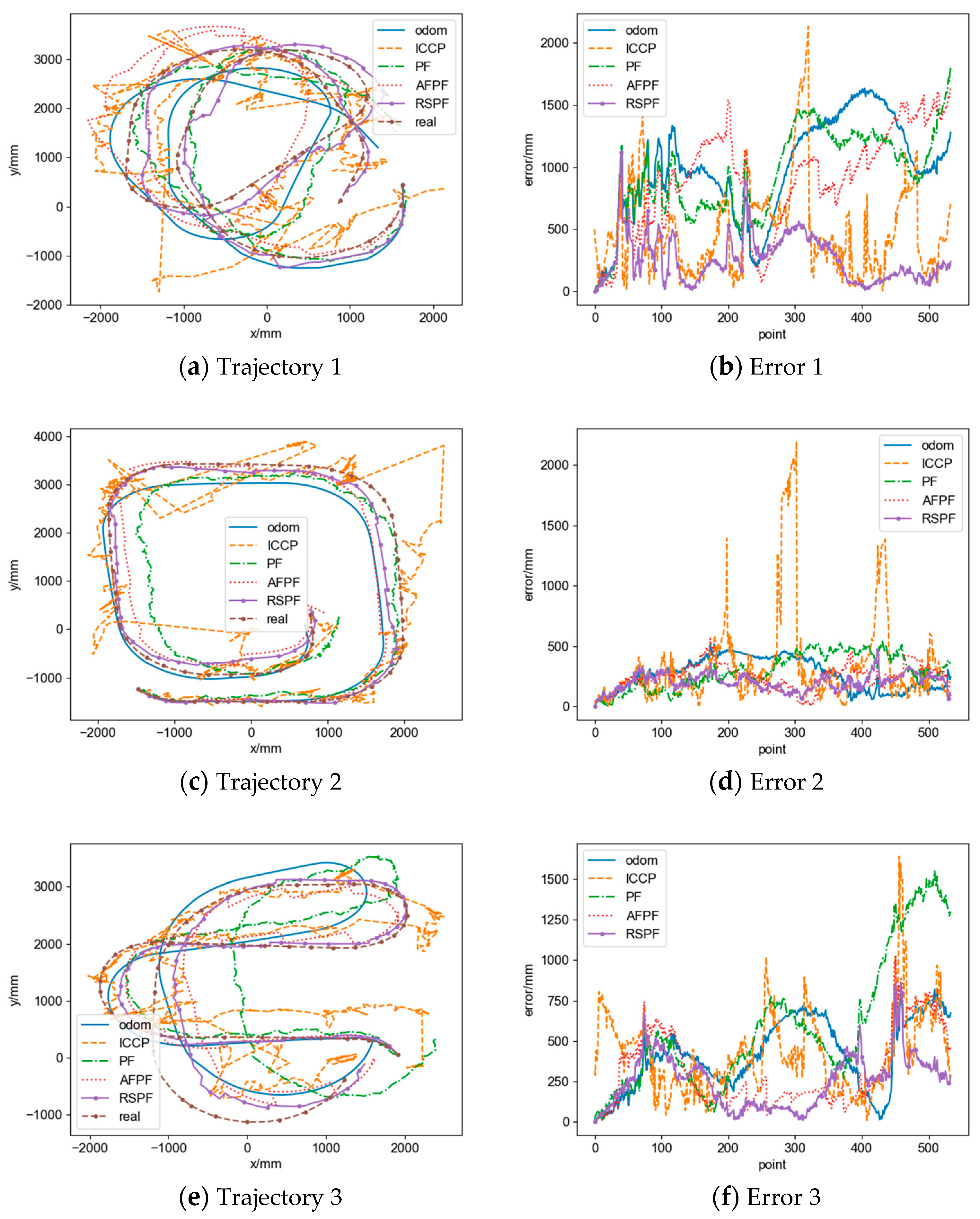
The trajectory and positioning errors of some experimental results are shown in
Figure 19, and the statistical data is shown in
Table 7 based on the defined evaluation metrics.
4.2.2. Positioning Accuracy Evaluation
As shown in
Figure 19 and
Table 7, the proposed method in this paper achieves a higher level of positioning accuracy compared to other algorithms. Specifically, the real-time ICCP has a reduced average
and an average
of 6.54% and 28.00%, respectively, while the average
has shown a 16.60% improvement. The single-point particle filter has a reduced average
by 4.74%, while the average
and the average
have increased by 5.33% and 20.63%, respectively. The AFPF has a reduced average
, average
, and average
of 7.60%, 6.56%, and 8.68%, respectively. And the RSPF-based localization method has a reduced average
, average
, and average
of 34.04%, 41.23%, and 28.55%, respectively.
Due to the significant differences in shape between the odometry trajectory and the actual trajectory and the presence of high noise levels in the magnetometer data, both the real-time ICCP and the single-point particle filter experience a considerable number of matching failures, resulting in additional errors. On the other hand, AFPF, with an execution interval of 800 mm, experiences fewer matching failures. However, the positioning accuracy of AFPF is heavily influenced by trajectory shapes. As the robot’s traveling distance increases, the positioning performance gradually deteriorates, limiting its ability to reduce errors. In contrast, the method proposed in this paper demonstrates a good ability to correct trajectory shapes and exhibits robustness against noise, effectively suppressing odometry cumulative errors and achieving higher positioning accuracy.
4.2.3. Efficiency Evaluation
In terms of execution efficiency, according to
Table 7, the average processing time of the real-time ICCP for 100 points is approximately 20.77 s. The processing times of the single-point particle filter, AFPF, and RSPF-based localization method are 4.29%, 1.16%, and 40.63%, respectively, compared to the real-time ICCP. From
Table 6 and
Table 7, it can be observed that, compared to the simulated environment, the experimental area under real conditions is smaller, resulting in a decrease in the computational complexity of contour lines. As a result, the processing time of the real-time ICCP is reduced by 26.03% compared to the simulation. However, it still has the longest processing time compared to other algorithms. The single-point particle filter still has the shortest computation time, followed by AFPF. Due to the increase of
to 10, the time consumption of the RSPF-based localization method has increased to 9.48 times that of the single-point particle filter, but it is still faster compared to the real-time ICCP. Considering the improved accuracy, this level of computational efficiency is acceptable.
4.3. Discussion
The generality and efficiency of the RSPF-based localization method are discussed in this section:
- (1)
Discussion of Generality:
RSPF can process data sequences in real time to reduce the impact of high noise levels in measurement data and improve the robustness of the localization algorithm. Simultaneously, when integrated with the odometry calibration model, it mitigates the influence of trajectory shapes, resulting in the achievement of high-precision positioning results. This strategy can be applied to other multi-sensor fusion localization algorithms based on motion models with severe noise in the data, including, but not limited to, geomagnetic/INS integrated navigation and others.
However, there are still some issues with our selection of range limit at present. In order to maintain the universality of the parameters, we have chosen larger constraint parameters, , , and , which may lead to potential algorithm divergence or wastage of computing resources. We will explore more suitable parameter selection in our future research.
- (2)
Discussion of Efficiency:
The real-time analysis of a data sequence may introduce heightened computational complexity, and the computation time is approximately the product of the processing time of the single-point algorithm and sequence length, resulting in a decrease in execution efficiency. We will explore in future research how to lightweight algorithms to further improve real-time performance while maintaining positioning accuracy.
- (3)
Discussion of Robustness:
Simulation results show that the RSPF-based localization method has strong robustness against zero mean Gaussian noise. However, compared to the simulation, the localization performance of the method has decreased in real environments, which may be due to the complexity of noise in real environments. We will consider how to reduce the noise impact in real environments in future research, such as adaptively adjusting sequence length and designing more suitable particle weight formulas.
5. Conclusions
In this paper, we proposed a geomagnetic/odometry integrated localization method based on RSPF for differential robot navigation. The proposed RSPF method used the data sequence from a segment of the trajectory to perform particle filtering. This approach reduced positioning errors caused by magnetometer measurement noise in a single-point particle filter while maintaining real-time performance. Additionally, the method incorporated the odometry calibration parameters of a differential robot to adjust the trajectory shapes, thereby mitigating errors introduced by rigid transformations applied to the trajectory. Lastly, secondary matching on the matching results through the MAGCOM algorithm was performed to reduce the potential position errors of the particle filter. The experimental results indicated that, compared to the odometry trajectory, the average , average , and average have been reduced by 34.04%, 41.23%, and 28.55%, respectively. However, compared to the single-point particle filter, this algorithm will result in an increase in computational complexity and an average processing time of 9.48 times, which leads to higher hardware support when applied.
In summary, the proposed method can effectively improve positioning accuracy and offers an important reference to geomagnetic-aided localization in other applications. But further research is still needed to reduce the complexity of the method.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}