
A Comprehensive Evaluation Algorithm of Multi-Point Relay Based on Link-State Awareness for UANETs

Abstract
1. Introduction
2. Related Works
2.1. Research Status
2.2. MPR Selection Model
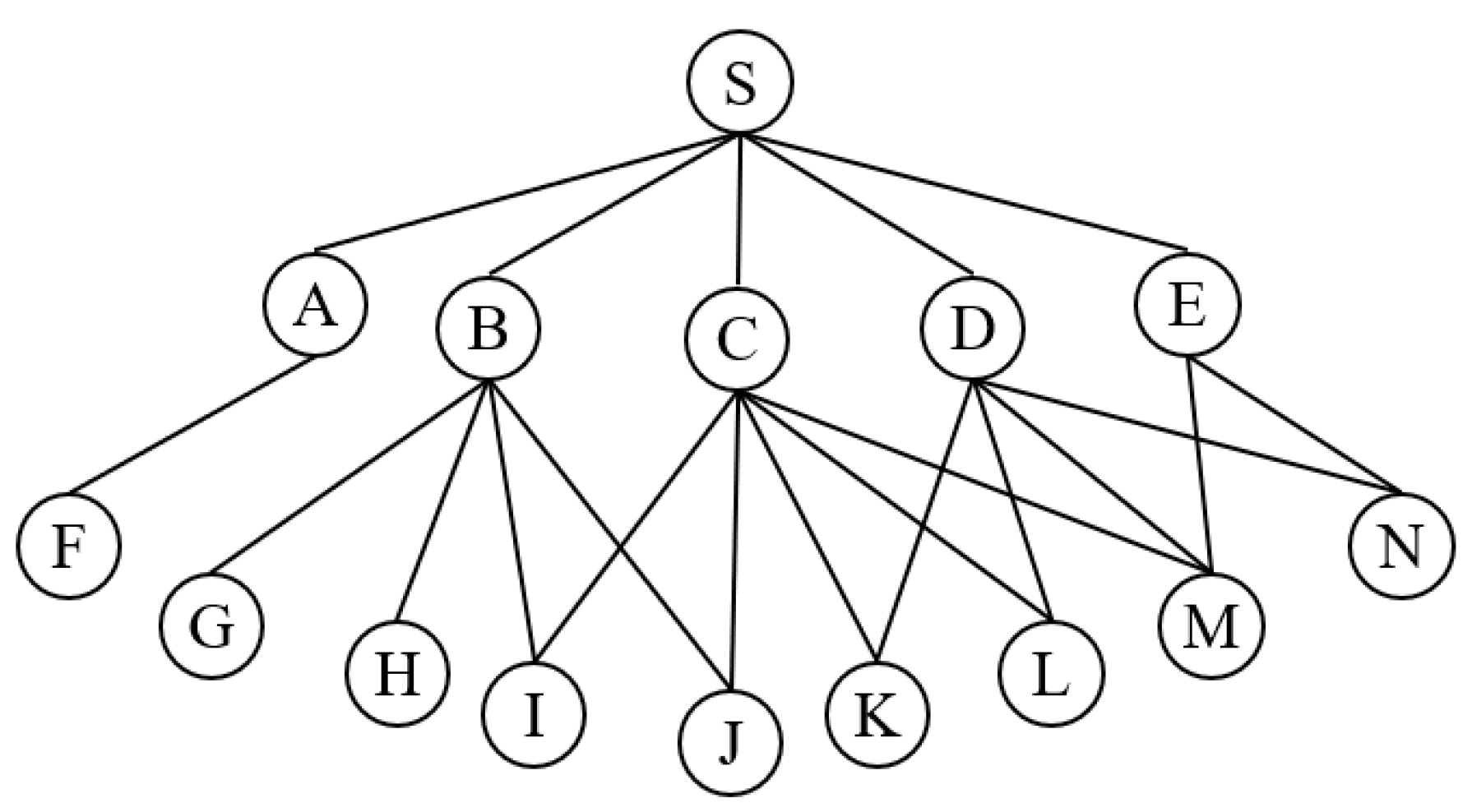
- Step 1. Select nodes from through which node can only reach certain 2-hop neighbors, and then add them to .
- Step 2. Sort 1-hop neighbors from high to low based on the number of the coverage for 2-hop neighbors, and select the ones with the highest coverage to join .
- Step 3. Update and remove the 1-hop neighbors from and 2-hop neighbors from for each addition operation.
- Step 4. Repeat the Step 2 and remove nodes through the Step 3, and finally end operation until the nodes of can completely cover all of the 2-hop neighbors from .
2.3. Analysis of MPR Selection Issues
3. Proposed Algorithm
3.1. Evaluation Parameters
3.1.1. Awareness of Mobility
- Link Duration
- 2.
- Stability Degree of Link
- 3.
- Average Neighbor Set Change Rate
3.1.2. Awareness of Load
- Load of Node
- 2.
- Load of Link
- 3.
- Load of Neighbor Set
3.2. Evaluation Algorithm of TOPSIS-MPR
- Construct the original evaluation matrix .
- Construct the standardized matrix .
- Construct the weight matrix .
- Construct the weighted evaluation matrix .
- Determine the theoretical optimal solution and the worst-case solution .
- Calculate the proximity factor matrix .
3.3. Specific Steps of TOPSIS-MPR Algorithm
- Step 1. Initialize , .
- Step 2. By traversing , calculate the distance between node and its neighbors, and judge whether is greater than the communication distance . If so, remove the neighbor from ; otherwise, keep the neighbor.
- Step 3. By traversing , calculate link state evaluation indicators, namely: LD, SDL, ANSCR, LL, and LNS.
- Step 4. , so that node is the only reachable relay of a node in , then add node to , that is: , and remove node in and the 2-top neighbors in reachable through node , then proceed to the Step 6.
- Step 5. , , calculate the proximity factor of all nodes based on the evaluation algorithm of TOPSIS-MPR, select the node with the highest value, then add node to , that is: , and remove node in and the 2-top neighbors in reachable through node , then proceed to the Step 6.
- Step 6. Judge ? If so, proceed to the Step 7; otherwise, proceed to the Step 5.
- Step 7. The algorithm ends and is obtained, which is the MPR set of node .
4. Simulation and Results
4.1. Simulation
- ANSCR is the average neighbor set change rate of the sending node of the hello control packet. LN and LSN are the load of lode and the load of neighbor set of the node of the hello control packet, respectively.
- Longitude, Latitude, and Altitude are the position coordinates of the node in the x, y, and z directions of the sending node of the hello control packet, respectively.
- Velocity_X, Velocity_Y, and Velocity_Z are the velocities of the node in the x, y, and z directions of the sending node of the hello control packet, respectively.
4.2. Analysis of Results
- Packet Delivery Rate
- 2.
- Average End-to-End Delay
- 3.
- Throughput
- 4.
- Route Control Overhead
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, M.; Zhao, Y.F.; Zhou, S.D. An improved OLSR protocol for FANET. Electron. Meas. Technol. 2022, 45, 65–69. [Google Scholar]
- Ren, H.B. Applications of small UAV in agricultural plant protection. Agric. Eng. Technol. 2023, 43, 49–50. [Google Scholar]
- Yao, Y.K.; Zhang, B.J.; Ren, L.D. Multipath routing strategy of UAV Ad hoc network based on OLSR protocol. Appl. Res. Comput. 2022, 39, 3114–3118. [Google Scholar]
- Vara, M.; Campo, C. Cross-Layer Service Discovery Mechanism for OLSRv2 Mobile Ad Hoc Networks. Sensors 2015, 15, 17621–17648. [Google Scholar] [CrossRef]
- Wang, J.; Li, F.F.; Yu, Q. Link State Reasoning Based Optimized Routing Protocol for Wireless Mesh Networks. Comput. Sci. 2012, 39, 37–40+69. [Google Scholar]
- Dong, Q.J.; Zhao, H.T.; Zheng, C.Y.; Wang, H.J. Construction of Typical Scenarios and Performance Analysis of Routing Protocols for UAV Ad Hoc Network. Commun. Technol. 2019, 52, 2149–2155. [Google Scholar]
- Chen, J.T.; Guo, W.; Ren, Z. An Implementation plan of topology discovery of OLSR protocol. China Meas. Technol. 2006, 32, 78–81. [Google Scholar]
- Zhou, L.; Zhou, T.; Zhou, J.G.; Tan, Y. Research on Optimization of OLSR Protocol Based on Energy Perception. Appl. Res. Comput. 2020, 37, 250–252. [Google Scholar]
- Liu, J.J.; Nei, K.; Ma, J.F.; Sakano, T. Throughput and Delay Tradeoffs for Mobile Ad Hoc Networks with Reference Point Group Mobility. IEEE Trans. Wirel. Commun. 2014, 14, 1266–1279. [Google Scholar] [CrossRef]
- Zhou, C.J.; Zhou, J.G. An OLSR-based Routing Algorithm for UAV Networks. Comput. Eng. 2021, 47, 174–179+185. [Google Scholar]
- Nishiyama, H.; Ngo, T.; Ansari, N.; Kato, N. On Minimizing the Impact of Mobility on Topology Control in Mobile Ad Hoc Networks. IEEE Trans. Wirel. Commun. 2012, 11, 1158–1166. [Google Scholar] [CrossRef]
- Felemban, E. Evaluation of Routing Protocols and Mobility in Flying Ad-hoc Network. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 643–650. [Google Scholar] [CrossRef]
- Belkhira, S.A.H.; Boukli-Hacene, S.; Lorenz, P.; Belkheir, M.; Gilg, M.; Zerroug, A. A new mechanism for MPR selection in mobile ad hoc and sensor wireless networks. In Proceedings of the 2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020. [Google Scholar]
- Wu, T.; Yin, X.; Zhang, L.; Ning, J. Measurement-Based Channel Characterization for 5G Downlink Based on Passive Sounding in Sub-6 GHz 5G Commercial Networks. IEEE Trans. Wirel. Commun. 2021, 20, 3225–3239. [Google Scholar] [CrossRef]
- Wang, P.; Di, B.; Zhang, H.; Bian, K.; Song, L. Cellular V2X Communications in Unlicensed Spectrum: Harmonious Coexistence with VANET in 5G Systems. IEEE Trans. Wirel. Commun. 2018, 17, 5212–5224. [Google Scholar] [CrossRef]
- Wang, P.; Di, B.; Zhang, H.; Bian, K.; Song, L. Platoon Cooperation in Cellular V2X Networks for 5G and Beyond. IEEE Trans. Wirel. Commun. 2019, 18, 3919–3932. [Google Scholar] [CrossRef]
- Begishev, V.; Sopin, E.; Moltchanov, D.; Pirmagomedov, R.; Samuylov, A.; Andreev, S.; Koucheryavy, Y.; Samouylov, K. Performance Analysis of Multi-Band Microwave and Millimeter-Wave Operation in 5G NR Systems. IEEE Trans. Wirel. Commun. 2019, 20, 3475–3490. [Google Scholar] [CrossRef]
- Huang, Y.; Xie, R.; Gao, B.; Wang, J. Dynamic Routing in Flying Ad-hoc Networks using Link Duration Based MPR Selection. In Proceedings of the 2020 92nd IEEE Vehicular Technology Conference (VTC), Victoria, BC, Canada, 18 November–16 December 2020. [Google Scholar]
- Yang, J.; Ren, Z.; Zhu, Q.Z. MPR algorithm for faster acquisition of network topology. Appl. Res. Comput. 2022, 39, 221–225. [Google Scholar]
- Tilwari, V.; Bani-Bakr, A.; Qamar, F.; Hindia, M.N.; Jayakody, D.N.K.; Hassan, R. Mobility and Queue Length Aware Routing Approach for Network Stability and Load Balancing in MANET. In Proceedings of the 2021 8th International Conference on Electrical Engineering and Informatics (ICEEI), Kuala Terengganu, Malaysia, 12–13 October 2021. [Google Scholar]
- Dong, S.; Zhang, H. An MPR Set Selection Algorithm Based on Set Operation. In Proceedings of the 2021 5th IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; pp. 5–8. [Google Scholar]
- Barki, O.; Guennoun, Z.; Addaim, A. New approach for selecting multi-point relays in the optimized link state routing protocol using self-organizing map artificial neural network: OLSR-SOM. IAES Int. J. Artif. Intell. 2023, 12, 648–655. [Google Scholar] [CrossRef]
- Zhao, Q.C.; Yang, Y.W.; Xie, Y.S.; Tang, X.F.; Li, C. Research on Improved Ant Colony Optimization Algorithm of MPR Under Dense MANET. Comput. Eng. 2021, 47, 135–140+172. [Google Scholar]
- Wu, J.Q.; Ren, Z.; Wang, L.; Zhao, Z.J. Link-stability-based Minimum Multipoint Relay Selection Algorithm. J. Chin. Comput. Syst. 2020, 41, 2386–2391. [Google Scholar]
- Dong, S.Y.; Zhang, H.; Wang, L. Optimization of OLSR Routing Protocol in UAV Ad Hoc Network. J. Ordnance Eng. Coll. 2017, 29, 67–70. [Google Scholar]
- Yi, H.H.; Li, L.; Huang, J.X.; Wang, Y.; Ding, R. SL-MPR Selection Algorithm Based M-OLSR Routing Protocol. Mech. Electr. Eng. Technol. 2023, 52, 111–116. [Google Scholar]
- Xu, T.T. Research on Task-Oriented UAV Formation Networking Technology. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2020. [Google Scholar]
- Chiu, H.L.; Wu, S.H. Cross-Layer Performance Analysis of Cooperative ARQ with Opportunistic Multi-Point Relaying in Mobile Networks. IEEE Trans. Wirel. Commun. 2018, 17, 4191–4205. [Google Scholar] [CrossRef]
- Usha, M.; Ramakrishnan, B. A Robust Architecture of the OLSR Protocol for Channel Utilization and Optimized Transmission Using Minimal Multi Point Relay Selection in VANET. Wirel. Pers. Commun. 2019, 109, 271–295. [Google Scholar] [CrossRef]
- Liu, J.; Wang, L.; Wang, S.; Feng, W.; Li, W. Minimum MPR set selection algorithm based on OLSR protocol. J. Comput. Appl. 2015, 35, 305–308. [Google Scholar]
- Jiang, Y.; Mi, Z.; Wang, H.; Sun, Y.; Zhao, N. Research on OLSR Adaptive Routing Strategy Based on Dynamic Topology of UANET. In Proceedings of the 2019 IEEE 19th International Conference on Communication Technology (ICCT), Xi’an, China, 16–19 October 2019; pp. 1258–1263. [Google Scholar]
- Gangopadhyay, S.; Jain, V.K. A Position-Based Modified OLSR Routing Protocol for Flying Ad Hoc Networks. IEEE Trans. Veh. Technol. 2023, 72, 12087–12098. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Kanellopoulos, D. Performance Evaluation of Standard and Modified OLSR Protocols for Uncoordinated UAV Ad-Hoc Networks in Search and Rescue Environments. Electronics 2023, 12, 1334. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameter | Parameter Value |
|---|---|
| Simulation Time | 300 s |
| Node Movement Range | 1.5 km × 1.5 km × 0.1 km |
| Node Number | 50 nodes |
| Mobility Model | 3D Gaussian-Markov model |
| MAC Protocol | IEEE 802.11 b |
| Propagation Loss Model | Free space propagation loss model |
| Channel Rate | 11 Mbps |
| Data Packet Size | 256 bytes |
| Data Packet Rate | 32,768 bps |
| Average Node Speed | 10, 15, …, 50 m/s |
| Speed Stage | Speed | CEL-OLSR | PM-OLSR | ML-OLSR | LD-OLSR | OLSR |
|---|---|---|---|---|---|---|
| Low speed stage: 10 m/s~20 m/s | 10 m/s | 81% | 78% | 75% | 72% | 62% |
| 15 m/s | 79% | 76% | 73% | 69% | 60% | |
| 20 m/s | 78% | 76% | 72% | 68% | 59% | |
| Mid low-speed stage: 25 m/s~35 m/s | 25 m/s | 79% | 75% | 72% | 68% | 56% |
| 30 m/s | 77% | 74% | 71% | 67% | 55% | |
| 35 m/s | 76% | 74% | 69% | 65% | 54% | |
| Mid high-speed stage: 40 m/s~50 m/s | 40 m/s | 75% | 73% | 68% | 63% | 52% |
| 45 m/s | 72% | 70% | 64% | 59% | 47% | |
| 50 m/s | 71% | 69% | 62% | 57% | 45% |
| Speed Stage | Speed | CEL-OLSR | PM-OLSR | ML-OLSR | LD-OLSR | OLSR |
|---|---|---|---|---|---|---|
| Low speed stage: 10 m/s~20 m/s | 10 m/s | 8.0115 ms | 10.4237 ms | 14.4682 ms | 16.9842 ms | 24.8149 ms |
| 15 m/s | 7.1125 ms | 11.3785 ms | 15.3781 ms | 17.3932 ms | 25.2993 ms | |
| 20 m/s | 7.4568 ms | 11.9879 ms | 15.8749 ms | 18.8631 ms | 26.9474 ms | |
| Mid low-speed stage: 25 m/s~35 m/s | 25 m/s | 8.0299 ms | 12.6382 ms | 16.5078 ms | 19.4923 ms | 27.7827 ms |
| 30 m/s | 8.0965 ms | 13.0215 ms | 16.8876 ms | 20.8086 ms | 32.3468 ms | |
| 35 m/s | 9.9706 ms | 14.7824 ms | 18.2349 ms | 23.7232 ms | 35.1833 ms | |
| Mid high-speed stage: 40 m/s~50 m/s | 40 m/s | 9.8539 ms | 15.8246 ms | 19.8537 ms | 25.1414 ms | 40.4587 ms |
| 45 m/s | 10.4783 ms | 15.5259 ms | 20.8123 ms | 26.3367 ms | 44.1619 ms | |
| 50 m/s | 11.0763 ms | 16.4649 ms | 23.3782 ms | 28.1896 ms | 46.5146 ms |
| Speed Stage | Speed | CEL-OLSR | PM-OLSR | ML-OLSR | LD-OLSR | OLSR |
|---|---|---|---|---|---|---|
| Low speed stage: 10 m/s~20 m/s | 10 m/s | 27.3271 Kbps | 26.2906 Kbps | 24.4521 Kbps | 22.3386 Kbps | 14.5856 Kbps |
| 15 m/s | 26.9345 Kbps | 25.6102 Kbps | 22.8175 Kbps | 20.9329 Kbps | 13.4219 Kbps | |
| 20 m/s | 25.2784 Kbps | 24.0471 Kbps | 21.7056 Kbps | 18.0408 Kbps | 13.1396 Kbps | |
| Mid low-speed stage: 25 m/s~35 m/s | 25 m/s | 24.8241 Kbps | 23.5923 Kbps | 19.8765 Kbps | 16.2763 Kbps | 12.0620 Kbps |
| 30 m/s | 23.7894 Kbps | 21.7894 Kbps | 18.1109 Kbps | 14.9236 Kbps | 11.8063 Kbps | |
| 35 m/s | 21.7406 Kbps | 19.7406 Kbps | 16.9021 Kbps | 13.8289 Kbps | 11.1214 Kbps | |
| Mid high-speed stage: 40 m/s~50 m/s | 40 m/s | 19.4539 Kbps | 17.4539 Kbps | 15.6454 Kbps | 12.2358 Kbps | 10.5553 Kbps |
| 45 m/s | 18.7141 Kbps | 16.5141 Kbps | 14.2456 Kbps | 11.7693 Kbps | 10.5621 Kbps | |
| 50 m/s | 17.5242 Kbps | 15.2542 Kbps | 13.7857 Kbps | 10.8997 Kbps | 9.0364 Kbps |
| Speed Stage | Speed | CEL-OLSR | PM-OLSR | ML-OLSR | LD-OLSR | OLSR |
|---|---|---|---|---|---|---|
| Low speed stage: 10 m/s~20 m/s | 10 m/s | 36.73% | 37.23% | 37.83% | 38.17% | 40.31% |
| 15 m/s | 37.31% | 38.48% | 39.31% | 40.05% | 42.89% | |
| 20 m/s | 38.12% | 39.49% | 40.89% | 41.93% | 43.96% | |
| Mid low-speed stage: 25 m/s~35 m/s | 25 m/s | 38.28% | 40.19% | 41.42% | 43.28% | 44.32% |
| 30 m/s | 39.04% | 40.97% | 42.83% | 44.16% | 45.26% | |
| 35 m/s | 40.28% | 42.01% | 43.51% | 46.02% | 47.71% | |
| Mid high-speed stage: 40 m/s~50 m/s | 40 m/s | 41.14% | 43.07% | 44.86% | 47.62% | 49.06% |
| 45 m/s | 43.37% | 44.76% | 46.27% | 49.04% | 51.98% | |
| 50 m/s | 45.96% | 47.41% | 49.15% | 51.22% | 54.14% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, R.; Zhang, X.; Liu, J.; Wang, G.; Zhang, D. A Comprehensive Evaluation Algorithm of Multi-Point Relay Based on Link-State Awareness for UANETs. Sensors 2024, 24, 1702. https://doi.org/10.3390/s24051702
Jin R, Zhang X, Liu J, Wang G, Zhang D. A Comprehensive Evaluation Algorithm of Multi-Point Relay Based on Link-State Awareness for UANETs. Sensors. 2024; 24(5):1702. https://doi.org/10.3390/s24051702
Chicago/Turabian StyleJin, Rencheng, Xinyuan Zhang, Jiajun Liu, Guangxu Wang, and Di Zhang. 2024. "A Comprehensive Evaluation Algorithm of Multi-Point Relay Based on Link-State Awareness for UANETs" Sensors 24, no. 5: 1702. https://doi.org/10.3390/s24051702
APA StyleJin, R., Zhang, X., Liu, J., Wang, G., & Zhang, D. (2024). A Comprehensive Evaluation Algorithm of Multi-Point Relay Based on Link-State Awareness for UANETs. Sensors, 24(5), 1702. https://doi.org/10.3390/s24051702